ĐIỀU KHIỂN ROBOT SCARA DÙNG MOMENT TÍNH
NỘI DUNG ĐỒ ÁN
- Giới thiệu về Robot Scara
Robot SCARA ra đời vào năm 1979, đây là một kiểu tay máy có cấu tạo đặc biệt được sử dụng nhiều trong các công việc lắp ráp các tải trọng nhỏ theo phương thẳng đứng.
Robot SCARA bao gồm hai khớp nối và hai cánh tay. Trên hai khớp nối sẽ gắn hai động cơ để cung cấp moment điều khiển hai cánh tay l1,l2 như hình vẽ.
Các phương trình trên áp dụng cho bài toán điều khiển theo không gian khớp nối. Cho phép xác định cặp góc từ tọa độ (x,y) cho trước của đầu mút cánh tay robot SCARA trong không gian hoạt động.
Trong quá trình điều khiển robot, ứng với một vị trí (x,y) trong không gian hoạt động có thể có nhiều cặp góc trong không gian khớp nối. Do đó, ta phải chọn lựa một cặp nghiệm phù hợp với yêu cầu điều khiển. Có nhiều cách chọn lựa tuỳ theo đối tượng và mục đích:
- Tổng quãng đường dịch chuyển của các khớp ngắn nhất.
- Giảm bớt ảnh hưởng tương tác giữa các khớp.
- Năng lượng tiêu thụ thấp nhất.
- Giới hạn động học của hệ thống.
Robot SCARA với hai khớp nối ứng với mỗi tọa độ (x,y) của đầu mút cánh tay chúng ta sẽ có hai nghiệm cho các cặp góc. Do đó, ta sẽ chọn cặp góc sao cho tổng biến thiên của cặp góc từ vị trí k-1 đến vị trí k là nhỏ nhất.
Giới hạn không gian hoạt động của hệ thống thông qua cặp góc
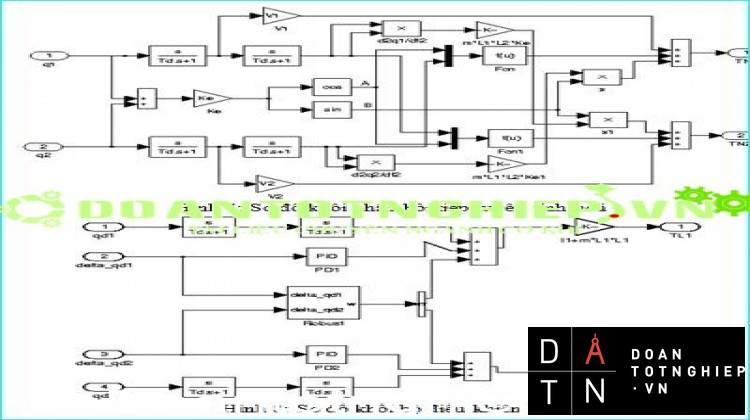
- Điều khiển robot SCARA dùng moment tính(computed torque)
Trong phương pháp moment tính, ta phải xây dựng hai vòng điều khiển. Vòng hồi tiếp trong được xây dựng dựa trên động lực học của hệ thống để bù tất cả các thành phần phi tuyến của hệ thống. Vòng hồi tiếp ngoài xây dựng dựa trên sai lệch giữa tín hiệu ra và tín hiệu đặt. Chức năng của vòng hồi tiếp trong là tuyến tính hoá mối liên hệ giữa tín hiệu đặt và tín hiệu ra trong khi vòng hồi tiếp ngoài làm ổn định hoá hệ thống.
- Cấu trúc của bộ điều khiển moment tính