ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ HỆ THỐNG MÁI CHE TỰ ĐỘNG
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ THIẾT KẾ HỆ THỐNG MÁI CHE TỰ ĐỘNG, thuyết minh ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ HỆ THỐNG MÁI CHE TỰ ĐỘNG, THIẾT KẾ HỆ THỐNG MÁI CHE TỰ ĐỘNG
LỜI NÓI ĐẦU ……………………………………………………………………...3
Ý TƯỞNG THIẾT KẾ. 4
CHƯƠNG I: THIẾT KẾ CƠ KHÍ 6
Thanh trượt: 7
Ống cuộn: 7
Đầu ghép: 8
Lò xo uốn: 11
Động cơ: 12
CHƯƠNG II: TÍNH TOÁN THIẾT KẾ BỘ TRUYỀN.. 13
1.Bộ truyền trục vít bánh vít: 13
2.Bộ truyền bánh răng thẳng: 16
CHƯƠNG III: SƠ LƯỢC LÝ THUYẾT ĐIỆN TỬ LIÊN QUAN.. 19
1. Cảm biến đo độ ẩm.. 19
1. Độ ẩm.. 19
2. L298 điều khiển động cơ một chiều. 23
3. Gió trong tự nhiên và phương pháp đo tín hiệu gió. 27
4. IC số họ TTL. 30
4.1 Đại cương về IC Lôgic TTL. 30
4.2. IC 7414. 36
5. Quang trở. 38
5.1 Vật liệu chế tạo: 39
5.2 Hai đặc trưng cơ bản của điện trở quang: 39
5.3. Ứng dụng của quang trở. 41
6. Khuếch đại thuật toán và so sánh tương tự. 42
6.1. khuếch đại thuật toán. 42
6.2 Bộ so sánh điện áp tương tự vả ứng dụng. 45
7. Bộ vi xử lý AT 89C51. 51
CHƯƠNG IV:THIẾT KẾ MẠCH ĐIỀU KHIỂN TỰ ĐỘNG.. 54
1.Sơ đồ khối và chức năng của các khối: 54
2. Thiết kế chi tiết: 55
2.1. Khối mạch nguồn: 55
2.2.Khối xử lý trung tâm.. 56
2.3. Khối tín hiệu điều khiển bằng tay. 57
2.4 Khối công suất 58
2.5 Khối mạch tín hiệu cảm biến: 58
2.5.1. Mạch cảm biến ngày đêm: 59
2.5.2 Mạch cảm biến ánh nắng: 62
2.5.3 Mạch cảm biến tín hiệu gió: 64
3.Thi công mạch và viết chương trình điều khiển. 67
3.1. Sơ đồ nguyên lý: 67
3.2. Viết chương trình cho bộ xử lý trung tâm.. 67
Tài Liệu Tham Khảo. 74
NHẬN XÉT CỦA GIÁO VIÊN.. 76
LỜI NÓI ĐẦU
Mái hiên di động là một thiết bị khá phổ biến trên thị trường hiện nay và khá được người dùng ư chuộng. Tuy nhiên, hầu hết tất cả các mái hiên di động trên thị trường hiện nay đều được điều khiển một cách hết sức thô sơ và cơ khí.
Trong đời sống hiện nay, tự động hóa các thiết bị để chúng hoạt động hiệu quả hơn là một xu thế tất yếu. Đề tài “Thiết kế mái che tự động” cũng nhằm thiết kế một hệ thống mái hiên hoạt động hiệu quả hơn mà không cần nhiều đến sự điều khiển trực tiếp từ người sử dụng, giúp tiết kiệm thời gian, công sức và cũng làm tăng tuổi thọ mái che so với các mái che truyền thống khác.
Trong khuôn khổ bài tiểu luận này, nhóm chúng tôi sẽ đưa ra phương án kĩ thuật để thiết kế một mái che hoạt động tự động. Tuy nhiên, với kiến thức hạn hẹp của bản thân, phương án chúng tôi đưa ra cũng có thể chưa hẳn là giải pháp tối ưu nhất và cũng khó có thể tránh được những thiếu sót, nhóm chúng tôi rất mong nhận được những góp ý từ các thầy cô và các bạn nhằm hoàn thiện hơn sản phẩm này.
Ý TƯỞNG THIẾT KẾ
Bộ điều khiển Mái hiên di động theo thời tiết lúc đầu chỉ đơn giản là: nếu ban ngày, trời mát, không có nắng và cũng không có mưa thì mái hiên sẽ tự động cuốn vào; nếu như trời nắng, hoặc mưa thì mái hiên sẽ tự động cuốn ra che. Như thế, người sử dụng sẽ không cần phải quay một cách thô sơ như trước nữa mà vẫn sử dụng mái hiên đó đúng mục đích
Một yêu cầu nữa đặt ra là khi con người muốn can thiệp vào sự điều khiển đó, mà không cần đến yếu tố tự động thì mạch xử lý của chúng ta cũng đáp ứng được. Nghĩa là, sẽ có hai chế độ, một là điều khiển một cách tự động, hai là có sự can thiệp của con người. Điều khiển tự động theo sự thay đổi của thời tiết, còn khi có bàn tay người điều khiển sẽ có một hệ thống bảng điều khiển với các nút ấn: điều khiển cuốn ra và điều khiển cuốn vào.
Nhưng thời tiết không phải chỉ có nắng và mưa thôi mà còn các yếu tố khác nữa tác động đến, ví dụ như là gió. Gió cũng là một yếu tố ảnh hưởng đến sự hoạt động của mái hiên, vì nếu như gió quá lớn sẽ làm hỏng, làm tốc mái hiên đi. Vậy vấn đề đặt ra ở đây là, khi có gió lớn, có nguy cơ làm hỏng mái hiên ta phải đưa ra được tín hiệu điều khiển mái hiên đi vào, lúc này tín hiệu gió được quyền ưu tiên nhất, các tín hiệu khác như nắng, mưa hoặc tín hiệu điều khiển cuốn ra sẽ không có tác dụng. Nhưng gió cũng có nhiều kiểu: gió to, gió vừa, gió xoáy, gió thoảng qua, gió trong một thời gian dài… và nếu như chỉ là một cơn gió thoáng qua, tức là thời gian tồn tại ngắn thì mặc dù mạnh tới đâu cũng không thể làm hỏng được mái hiên. Chỉ khi nào gió thật lớn, và kéo dài thì mới cần thiết phải đưa ra tín hiệu điều khiển cho mái hiên cuốn vào.
Ngoài tín hiệu gió được quyền ưu tiên nhất, trong bất kỳ trường hợp nào thì khi trời tối cũng cần phải điều khiển cho mái hiên đi vào nếu sử dụng chế độ tự động.
Như vậy, ta sẽ thiết kế một bộ điều khiển có hai chế độ: Tự động và Bằng tay.
+ Chế độ Tự động:
- Ban đêm:mái hiên cuốn vào.
- Ban ngày: nếu trời nắng hoặc mưa: mái hiên cuốn ra; ngược lại thì cuốn vào.
- Khi có gió : mái hiên cuốn vào (kể cả khi trời có nắng hoặc mưa)
+ Chế độ Bằng tay :
- Có tín hiệu điều khiển ra : mái hiên mở ra
- Có tín hiệu điều khiển vào: mái hiên cuốn vào.
- Khi có gió: mái hiên đi vào (kể cả khi có tín hiệu điều khiển ra)
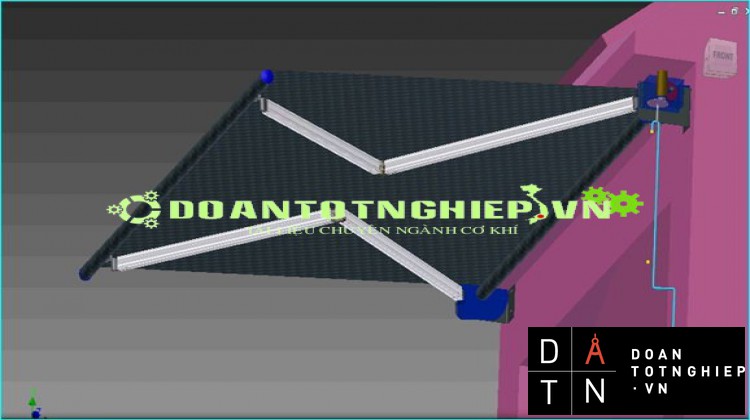
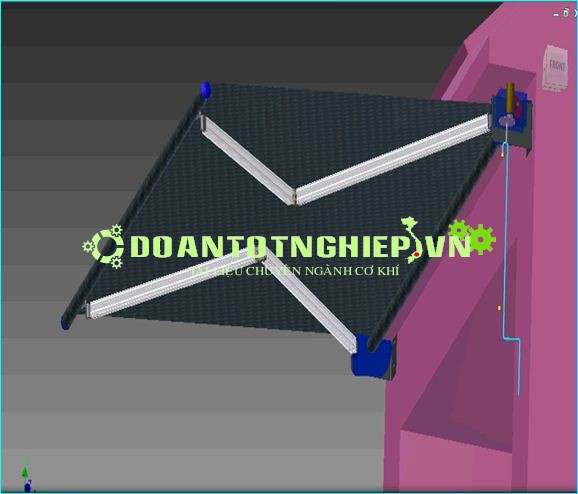
CHƯƠNG I: THIẾT KẾ CƠ KHÍ
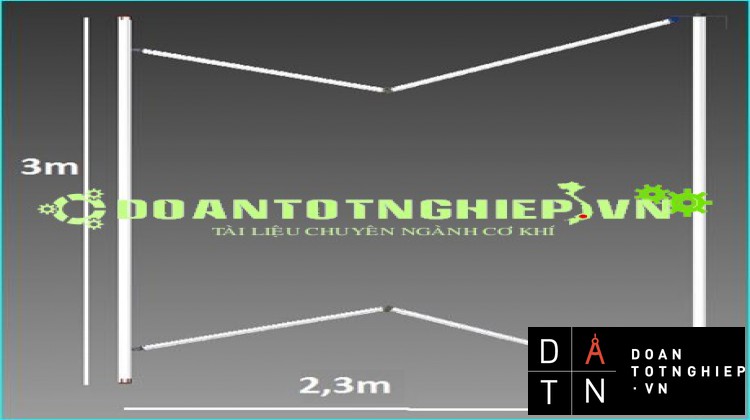
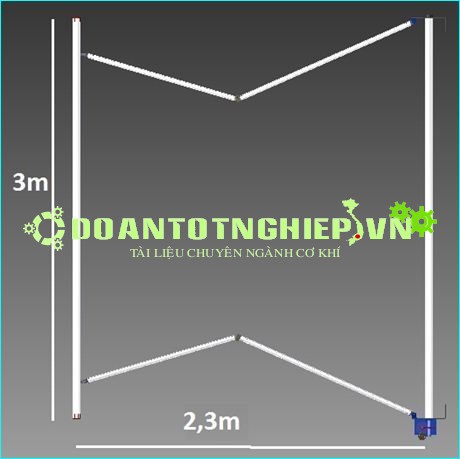
Chọn diện tích mái che di động để tính toán thiết kế làm đồ án là mái che có diện tích 3m x 2,3m
Thanh trượt:
Thanh trượt gồm bốn thanh, hai thanh trượt dài, hai thanh trượt ngắn. Thanh trượt dài ở trong, thanh trượt ngắn đặt ở ngoài.
Do hai thanh trượt không được phép duỗi thành một đường thẳng, do vậy ta phải để lại một góc giữa hai thanh trượt, ở đây ta chọn là 1500, mà ta chọn bạt có kích thước 3m x 2,3m, nên t chọn chiều dài thanh trượt là 1,4m và 1,2m.
Vật liệu A380 là hợp kim Al+ Si+Cu+Mg .
Mặt cắt ngang của thanh trượt: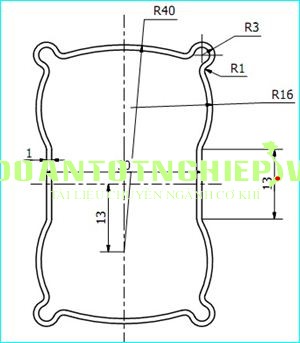

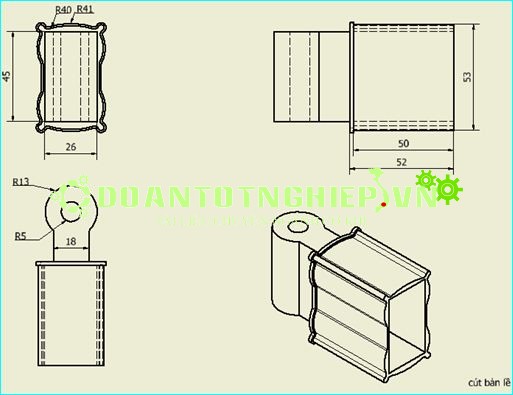
Có hai loại ống, một ống dài 3, đặt ở ngoài, giúp kéo căng bạt.
Ống thứ hai đặt ở trong, hai đầu được nối thêm hai đoạn thép . Một đầu dài 14mm, một đầu dài 100mm để nối với ổ bi và bánh vít truyền chuyển động quay.
Đầu ghép:
Đầu nối để ghép vào đầu thanh trượt . Giúp thanh trượt có thể ghép nối với nhau, ghép nối thanh trượt với phần bản lề được cố định vào tường.
Đầu nối được làm bằng hợp kim A518 là hợp kim Al+Mg.
Có ba loại đầu ghép, kích thước như sau:
Đầu nối với bản lề:
Lò xo uốn:
Lò xo uốn được đặt giữa khớp nối ghép giữa hai thanh trượt. Lò xo uốn có chức năng: khi bạt được kéo vào nhờ ống cuộn, nhưng khi được mở ra, nếu chỉ dựa vào trọng lực thì không được nhạy. Ta lắp thêm lò xo uốn ở giữa nối hai thanh trượt, khi khép lại thì lò xo bị nén, khi mở ra thì lò xo từ từ ép hai thanh trượt ra.
Vật liệu làm lò xo uốn là thép Si-Mn 60SiMnA là thép có độ đàn hồi cao.
Động cơ:
Do động cơ mái che không cần có tốc độ, công suất lớn, nên ta chọn động cơ DC-3212-024 DC24V. Có công suất 1450W, tốc độ quay 6250 vòng/phút.
ơ
|
Công suất |
1450W |
|
Tốc độ quay |
6250 vòng/phút |
|
Chiều dài thân |
107mm |
|
Đường kính thân |
mm |
|
Chiều dài trục |
15mm |
|
Đường kính trục |
mm |
CHƯƠNG II: TÍNH TOÁN THIẾT KẾ BỘ TRUYỀN
1.Bộ truyền trục vít bánh vít:
Bộ truyền trục vít bánh vít là bộ truyền từ trục quay tay, tới trục của ống cuộn, để làm quay uốn cuộn cuộn, nhả bạt.
- Ta lấy khoảng cách trục là 50mm.Chọn số răng trục vít là 2. Tỷ số truyền là: u=20.
Chọn số răng trục vít
răng.
q: đường kính trục vít.
Chọn sơ bộ (mm).
- Modun dọc trục vít:
- Hệ số dịch chỉnh:
1.4 Kích thước hình học bộ truyền
1.4.1 Đường kính vòng chia:
(mm)
(mm)
1.4.2 Đường kính vòng đỉnh:
(mm)
(mm)
1.4.3. Đường kính vòng đáy:
(mm)
(mm)
1.4.4. Đường kính ngoài của bánh vít:
(mm)
1.4.5. Góc ôm:
vật liệu bánh vít là đồng thanh không thiếc và đồng thau( )
Bảng thống kê:
|
Thông số |
Kích thước |
|
|
1 |
Khoảng cách trục |
(mm) |
|
2 |
Số răng |
răng răng |
|
3 |
Hệ số dịch chỉnh bánh vít |
|
|
4 |
Đường kính vòng chia |
(mm) (mm) |
|
5 |
Đường kính vòng đáy |
(mm) (mm) |
|
6 |
Đường kính đỉnh |
(mm) (mm) |
|
7 |
Đường kính ngoài bánh vít |
(mm) |
|
8 |
Chiều rộng bánh vít |
(mm) (mm) |
|
9 |
Góc ôm |
|
|
10 |
Tỷ số truyền |
u=20 |
|
11 |
Modun bánh vít |
m=2 |
|
12 |
Hệ số đường kính trục vít |
q=10 |
2.Bộ truyền bánh răng thẳng:
Bộ truyền bánh răng thẳng là bộ truyền từ trục động cơ tới trục vít của bộ truyền bánh vít.
Bánh răng nhỏ làm bằng thép C45 tôi cải thiện.
Ta chọn khoảng cách trục sơ bộ là aw=65(mm).
Chọn tỷ số truyền là u=4.
2.1. Xác định thông số ăn khớp:
2.1.1. Modun
Tra bảng modun tiêu chuẩn 6.8 (trang 99 sách Tính toán thiết kế hệ dẫn động cơ khí tập I). Ta chọn m=1,25
2.1.2 Xác định số răng:
Chọn z1=20 răng.
Chọn z2= 80 răng.
Khoảng cách trục tính chính xác là:
2.2. Xác định đường kính bánh răng:
2.2.1. Đường kính chia (d):
2.2.2. Đường kính lăn (dw)
2.2.3. Đường kính đỉnh răng(da): 2.2.4.Đường kính đáy răng(df):
2.3 Bảng thông số:
|
|
Thông số |
Kích thước |
|
1 |
Số răng |
z1=20 răng z2=80 răng |
|
2 |
Khoảng cách trục |
aw=62,5 (mm) |
|
3 |
Đường kính chia |
d1=25 (mm) d2=100 (mm) |
|
4 |
Đường kính đỉnh răng |
da1=27,5 (mm) da2=102,5 (mm) |
|
5 |
Đường kính đáy răng |
df1=59.675 (mm) df2=96,875 (mm) |
|
6 |
Đường kính lăn |
dw1=25 (mm) dw2=100 (mm) |
|
7 |
Góc profin răng |
|
|
8 |
Góc ăn khớp |
|
|
9 |
Hệ số dịch chỉnh |
x=0 |
|
10 |
Tỷ số truyền |
u=4 |
|
11 |
Góc nghiêng răng |
|
|
12 |
Modun |
m=1,25 |
|
13 |
Chiều rộng răng |
bw=10 |
CHƯƠNG III: SƠ LƯỢC LÝ THUYẾT ĐIỆN TỬ LIÊN QUAN
1. Cảm biến đo độ ẩm
1.1. Khái niệm chung
1. Độ ẩm là một thông số quan trọng tác động trực tiếp đến con người, đến thiết bị máy móc và các quá trình lý hoá.
Độ ẩm thay đổi trong một dải rộng 30% - 70% với độ ẩm nhỏ hơn 35% bộ máy tiêu hoá bị kích thích nếu lớn hơn 75% độ ra mồ hôi giảm nghiêm trọng.
Trong công nghiệp, các thiết bị, máy móc, độ ẩm ảnh hưởng trực tiếp đến chúng ta nhất là các thiết bị điện - điện tử. Do vậy mà việc đo, xác định độ ẩm và chống ẩm là nhiệm vụ rất quan trọng trong các nghành sản xuất công nghệ, điều khiển và thiết kế chế tạo thiết bị.
2. Một số định nghĩa cơ bản
- Nếu không khí ẩm có thể tích V, ở nhiệt độ T thì khối lượng M củakhông khí ẩm chứa thể tích V sẽ là tổng của khiối lượng không khí khô (mK)và khối lượng của hơi nước (mh) và ta có :
- Nếu gọi P là tổng áp xuất riêng phần của không khí khô (Pk) và của hơi nước (Ph) ta có:
- Tỉ lệ trộn: r (kg/kg)
Tỉ lệ trộn r là tỉ số giữa khối lượng hơi nước (mh)và khối lượng không khí khô (mK) mà hơi nước trộn trong đó :
- áp suất hơi bão hoà :
áp suất hơi bão hoà (Pbh (T)) đo bằng đơn vị Pa là áp suất hơi nước ở trạng thái cân bằng với nước lỏng ở nhiệt độ T. Lớn hơn áp suất này sẽ xảy ra hiện tượng ngưng tụ.
- Độ ẩm tương đối
Độ ẩm tương đối (U%) là tỉ số giữa áp suất riêng phần của hơi nước và áp suất hơi bão hoà ở nhiệt độ T
- Nhiệt độ hoá sương :
Nhiệt độ hoá sương Ths (0C) là nhiệt độ cần phải làm lạnh không khí ẩm xuống tới đó để đạt được trạng thái bão hoà. (Tỉ số trộn r không thay đổi trong quá trình làm lạnh). Đó chính là nhiệt độ sao cho :
- Nhiệt độ ẩm:
Nhiệt độ ẩm Ta(0 C) là nhiệt độ cân bằng của một khối nước hoá hơi và không khí trong trường hợp khi nhiệt lượng cần thiết để hoá hơi chỉ được trích từ không khí.
1. 2 ẩm kế biến thiên trở kháng
Đó là cảm biến điện trở và tụ điện màn các phần tử nhạy là các chất hút ẩm. Tính chất điện ( điện trở, điện dung) của các cảm biến phụ thuộc vào độ ẩm của môi trường. Cảm biến độ ẩm dựa trên nguyên lý biến thiên trở kháng được phân thành ẩm kế điện trở và ẩm kế tụ điện
1. ẩm kế điện trở:
ẩm kế điện trở là các thiết bị đo độ ẩm dựa trên cảm biến điện trở, chúng được phân thành hai loại:
- Điện trở kim loại: là một đế có kích thước nhỏ ( vài mm2 ) được phủ chất hút ẩm và gắn hai điện cực bằng kim loại không bị ăn mòn và bị ô xy hoá. Giá trị điện trở đo được giữa hai cực phụ thuộc vào hàm lượng nước (tỷ số giữa khối lượng nước hấp thụ với khối lượng chất khô) và vào nhiệt độ chất hút ẩm . hàm lượng nước lại phụ thuộc vào độ ẩm tương đối và nhiệt độ.
- Chất điện phân : là những chất dẫn điện. Điện trở của chúng phụ thuộc vào thể tích trong đó thể tích bị thay đổi theo hàm lượng nước, do đó có thể biến đổi độ ẩm tương đối thành tín hiệu điện
Trên đây là hình đường cong đặc trưng cho sự phụ thuộc của điện trở với độ tương đối của cảm biến điện trở
Trong thục tế điện trở Rm phụ thuộc đồng thời cả độ ẩm tương đối và cả nhiệt độ , ảnh hưởng của nhiệt độ có thể sử dụng mạch bù trừ như hình vẽ trên trong đó RA, RB có hệ số nhiệt độ giống nhau.
Với cảm biến điện trở có thể sử dụng với dải đo từ 5 95 % và dải nhiệt độ -10o C 50 hoặc 60 0 C. Thời gian hồi đáp cỡ 10 giây và sai số 2 5%.
2.ẩm kế điện dung
Ẩm kế điện dung sử dụng điện môi là màng mỏng polyme (hay Al2O3) có hấp thụ hơi nước, điện dung của tụ thay đổi tỉ lệ với độ ẩm được chuyển thành tín hiệu điện tương úng.
• Dải đo RH: 0% - 100%
• Dải nhiệt độ: -40°C đến 100°C
• Độ chính xác: ±2% đến ±3%
• Thời gian hồi đáp: khoảng vài s
• Kích thước nhỏ, ít chịu ảnh hưởng nhiệt của môi trường.
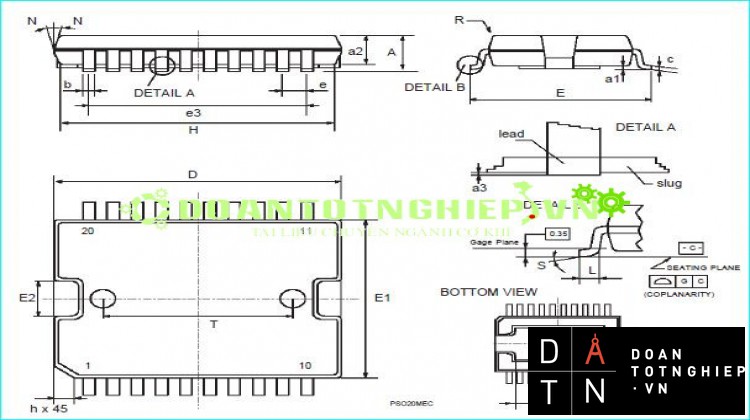
2. L298 điều khiển động cơ một chiều
2.1 Driver điều khiển tốc độ động cơ DC :
L298N (hình vẽ) là một driver chip tích hợp sẵn hai mạch cầu H bên trong với chuẩn điều khiển TTL, không có diode nội bảo vệ Mosfet. Chịu tải tối đa trên mỗi cầu là 2A, điện áp 40VDC. Logic ‘0’ ở ngõ vào lên tới 1,5V (khả năng khử nhiễu cao).
Sử dụng dạng đóng gói Multiwatt 15. Các thông số cần thiết khác của L298N có thể được tìm thấy tại trang web của hãng STMicroelectronics.
2.2 Những yêu cầu đặt ra
Trong thực tế ứng dụng này, động cơ DC chỉ có dòng tải 200mA khi hoạt động bình thường, và lên đến tối đa là 2A khi quá tải. Tuy nhiên, cũng cần thiết kế một bộ điều khiển mở có thể sử dụng cho các động cơ lên đến 4A.
Việc hạn dòng cho động cơ là rất cần thiết, nhất là khi robot hoạt động, có rất nhiều tình huống không mong đợi sẽ xảy ra, vì vậy, cần phải có chế độ hạn dòng bằng phần mềm.
Trong các trường hợp nguy hiểm như ngắn mạch do va chạm, hoặc tuột dây nối, cần có mạch bảo vệ chống ngắn mạch bằng phần cứng để đáp ứng kịp thời. Cần điều khiển PWM ở tần số cao để tránh tiếng ồn do động cơ gây ra, nhất là những tiếng kêu nghe rất rõ ở khoảng tần số 1kHz đến 3kHz. Bộ điều khiển PWM thông thường được dùng ở 5kHz.
2.3 Giải pháp
Nối song song hai cầu H như hình vẽ dưới đây để điều khiển động cơ lên đến 4A.
Để ngăn chặn dòng điện qua động cơ nhỏ hơn 4A, tại hai ngõ ‘sense’ chúng ta sử dụng điện trở công suất 1.2Ohm để lấy điện áp hồi tiếp về vi điều khiển. Trong chương trình điều khiển, điện áp hồi tiếp này được đo và luôn đảm bảo ở mức nhỏ hơn 1.2 x 4 = 4.8V. Với mức điện áp này vẫn đảm bảo sử dụng điện áp tham chiếu là điện áp nguồn nuôi vi điều khiển (Vdd – 5V) nên không cần dùng điện áp tham chiếu ngoài. Nếu chọn điện trở nhỏ hơn, điện áp chặn sẽ giảm xuống dưới 4.8V. Ví dụ chọn điện trở 0.6 Ohm, thì điện áp chặn sẽ là 2.4V. Như vậy lưới chia quá thấp, và độ nhạy lúc này giảm đi hai lần.
Hiện tượng ngắn mạch có thể xảy ra trong quá trình điều khiển động cơ. Hiện tượng này không làm ảnh hưởng nhiều đến động cơ, nhưng gây quá tải tức thời và khi chương trình chưa kịp kiểm soát điện áp hồi tiếp ở chân ‘sense’ sẽ gây cháy chip. Để hạn chế hiện tượng này, chúng tôi dùng một mạch bảo vệ ‘thông minh’ (hình vẽ). Khi hiện tượng ngắn mạch xảy ra, ngõ vào lập tức bị kéo xuống mức 0V.
Có nghĩa là ngõ ra cùng ở mức thấp và phanh động cơ tức thời trong vòng 10 micro giây. Hình vẽ dưới đây mô tả các mức điện áp tức thời khi có ngắn mạch.
Hai chế độ dừng của L298N rất thuân lợi. Dừng tự do (free stop) được thực hiện khi chân ‘enable’ được kéo xuống mass. Dừng nhanh hay phanh (fast stop – break) được thực hiện khi hai ngõ vào có cùng logic. Trường hợp dừng tự do chỉ được dùng khi điện áp hồi tiếp đo dòng tải ở chân ‘sense’ vượt quá cho phép và được dừng bởi chương trình điều khiển. Tất cả các trường hợp dừng khác đều dùng biện pháp dừng nhanh. Như vậy, trong trường hợp ngắn mạch, động cơ sẽ được duy trì ở trạng thái phanh.
L298N không có diode nội để bảo vệ các mosfet nằm bên trong, do đó, cần có các diode ngoài để bảo vệ. Để đảm bảo điều khiển ở tần số cao, cần dùng diode nhanh có điện trở thấp. Diode chuyên dụng để điều khiển động cơ là các diode fast recovery schottky. Nhưng ở tần số thấp như trong ứng dụng này, vẫn có thể dùng loại 1N4007.
Một lưu ý rằng L298N khi hoạt động rất nóng, nhiệt độ có thể làm phỏng tay khi chạm vào. Do vậy, cần có một miếng tản nhiệt để phân giải nhiệt độ cho L298N. Khi không có tản nhiệt, L298N sẽ nóng rất nhanh và tự động ngắt điều khiển. Trong các thí nghiệm, L298N sẽ ngắt mạch trong 45 đến 60 giây khi không có tản nhiệt. Khi có tản nhiệt, chúng tôi đã thử cho chạy liên tục với chu kỳ nhiệm vụ PWM là 100% trong vòng 15phút, và nhiệt độ của L298N không hề tăng cao.
3. Gió trong tự nhiên và phương pháp đo tín hiệu gió
3.1 Khái niệm chung
Gió trong tự nhiên là một hiện tượng không khí từ vùng này di chuyển đến vùng khác, cụ thể là không khí sẽ từ vùng áp suất cao di chuyển đến vùng áp suất thấp, từ vùng nhiệt độ thấp di chuyển đến vùng có nhiệt độ cao, tạo ra các dòng khí với các cấp độ khác nhau.
Người ta chia gió ra 12 cấp độ, từ cấp 1 đến cấp 12.
|
Cấp |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
m/s |
1 |
2 |
4 |
7 |
9 |
12 |
16 |
19 |
23 |
26 |
31 |
35 |
Gió trong tự nhiên thường đi kèm với các hiện tượng như mưa, dông, bão… và đôi khi gây ra những tổn thất vô cùng nghiêm trọng cho các tài sản của con người. Gió mạnh từ cấp 10 trở lên có thể làm đổ cây to, tốc các mái nhà, làm cho xe cộ gặp những rủi ro và có thể đe doạ đến tính mạng con người.
Tuy nhiên, ở các nước phát triển, người ta đã tìm ra được các phương pháp sản sinh ra năng lượng từ gió, phục vụ đời sống con người. Từ những ứng dụng giản đơn như làm quay các cối xay gió cho đến việc chạy các máy phát điện nhờ năng lượng gió. Gió thực sự là một nguồn năng lượng lớn trong tự nhiên và cần được tiếp tục khai thác.
3.2 Danh pháp hướng gió và bộ gõ quốc tế quy định:
Theo tiêu chuẩn quốc tế thì hướng gió trong tự nhiên bao gồm các hướng sau đây và mã số của chúng
|
Stt |
Hướng gió |
Mã số |
Stt |
Hướng gió |
Mã số |
|
1 |
Bắc |
36 |
9 |
Bắc-Đông-Bắc |
02 |
|
2 |
Nam |
18 |
10 |
Bắc-Tây-Bắc |
34 |
|
3 |
Đông |
09 |
11 |
Đông-Đông-Bắc |
07 |
|
4 |
Tây |
27 |
12 |
Tây-Tây-Bắc |
29 |
|
5 |
Đông-Bắc |
05 |
13 |
Nam-Đông-Nam |
16 |
|
6 |
Tây-Bắc |
32 |
14 |
Nam-Tây-Nam |
20 |
|
7 |
Đông-Nam |
14 |
15 |
Đông-Đông-Nam |
11 |
|
8 |
Tây-Nam |
23 |
16 |
Tây-Tây-Nam |
25 |
3.3 Các phương pháp đo gió
Hiện nay, trên thế giới người ta đã chế tạo ra được các thiết bị đo gió cực kỳ hiện đại nhưng cũng rất đắt tiền. Đa số các thiết bị hiện đại này dùng để đo tốc độ gió, hướng gió, và thường có cả nhật ký gió trong ngày, phục vụ cho các Đài, trạm Khí tượng Thuỷ văn, các ngành Hàng hải, Hàng không, các cơ quan nghiên cứu phát triển năng lượng gió…
Một trong các phương pháp đo gió đơn giản là dùng một cánh quạt gió chuyên dụng, có thể đón gió từ bất kỳ hướng nào thổi tới. Người ta sẽ gắn trục của cánh quạt này với một hệ thống các bánh răng, truyền chuyển động đến một động cơ điện một chiều hoặc xoay chiều, làm cho động cơ đó phát ra điện. Từ đó người ta có thể đo được các mức gió khác nhau nhờ xác định các mức điện áp ra tương ứng.
* Phương pháp đo gió đơn giản dùng quạt gió và động cơ một chiều:
Dùng một cánh quạt gió có hình ba chiếc gáo quay theo một hướng nhất định, đặt trên một mặt phẳng và lệch nhau một góc 1200 như hình vẽ dưới đây.
Dùng một động cơ một chiều điện áp 5VDC, để bắt chuyển động quay của quạt gió. Hệ thống bánh răng trên có ý nghĩa như một hệ thống giảm tốc, vì quạt gió được gắn trên cao, khi có gió mạnh sẽ quay với tốc độ rất lớn. Nếu ta gắn trực tiếp vào trục của động cơ, khi gió mạnh đến một mức nào đó có thể làm hỏng bạc của động cơ, hoặc mức điện áp ra quá lớn, vượt quá điện áp chịu đựng của động cơ sẽ gây hỏng động cơ.
Ở đây ta dùng một bánh răng có đường kính nhỏ để gắn trực tiếp vào trục của quạt gió, sau đó truyền chuyển động ra một bánh răng lớn nhằm hạn chế tốc độ quay cho động cơ, bánh răng lớn sẽ làm cho động cơ quay với một vận tốc nhỏ hơn rất nhiều (phụ thuộc vào tỷ số truyền) so với vận tốc quay của quạt gió.
Cuối cùng, chỉ cần lấy điện áp ra từ động cơ và đem so sánh với một điện áp chuẩn nào đó được đặt từ trước, ta sẽ đo được các mức gió khác nhau.
Đây chính là nguyên lý đo gió đơn giản. Chỉ cần dùng một mạch so sánh tương tự là có thể xác định được các mức gió khác nhau.
4. IC số họ TTL
4.1 Đại cương về IC Lôgic TTL
4.1.1 Các loại và tên gọi khác nhau của IC logic TTL
Tuỳ theo nơi sản xuất và công nghệ chế toạ mà IC logic 74xx có tên gọi khác nhau dù có sơ đồ chân giống nhau. Trong bảng so sánh dưới đây chúng ta sẽ biết được một số đặc trưng kỹ thuật quan trọng giữa các họ TTL với nhau.
4.1.2 Chữ viết tắt
a. Chữ viết tắt trong bảng chân lí:
|
L |
Low (Thấp ) |
|
H |
High ( cao ) |
|
X |
Trạng thái không có ý nghĩa |
|
Z |
Ngõ ra Tri- State đang ở trạng thái có tổng trở cao |
|
|
Xung dương chuyển từ mức thấp sang mức cao ở những ngõ vào của xungđồng bộ |
|
|
Xung âm chuyển từ mức cao xuống mức thấp ở những ngõ vào của xung đồng bộ |
|
J, K, R, S,D |
Tên những ngõ vào của những FlipFlops |
|
TOGGLE |
Cả hai ngõ ra của FlipFlop thay đổi mức lôgic sau mỗi lần thay tích cực của xung đồng bộ |
|
Q0 , |
Những ngõ ra của bộ nhớ, bộ đếm, bộ đẩy.. |
|
|
Mức lôgic của Q và trước khi trạng thái ổn định được liệt kể trong bảng sự thật của những ngõ vào được thành lập |
b. Các chữ viết tắt trong sơ đồ chân:
|
NC |
No internal connection. Chân Ic không nối với mạch điện bên trong IC |
|
CK |
Clock. Xung đồng hồ |
|
CLR |
Clear. Xung xoá |
|
RR |
Preset |
|
OC |
Output Control. Ngõ ra Tri- State |
|
X, |
Những ngõ ra của một bộ giãn (expender) hay những ngõ vào của cổng mở rộng |
c. Chữ viết tắt trong đặc trưng kỹ thuật
|
Vcc |
Điện áp nguồn |
|
VI |
In Put Voltage. điện áp vào |
|
VII |
Điện áp vào ở trạng thái thấp |
|
VIH |
Điện áp vào ở trạng thái cao |
|
VO |
Điện áp ra |
|
VOL, VOH |
Điện áp ra ở trạng thái thấp và cao |
|
IO,I1 |
Dòng điện vào ra |
|
IOZL |
Dòng điện rò ở ngõ ra TriState trong trạng thái thấp |
|
IOZH |
Dòng điện rò ở ngõ ra Tri- State trong trạng thái cao |
|
TA |
Nhiệt độ môi trường quanh IC |
|
tPd |
Thời gian trễ trung bình xung |
|
tpLH |
Ngõ ra trễ khi ngõ ra chuyển từ L sang H |
|
tPHL |
Ngõ ra trễ khi ngõ ra chuyển từ H sang L |
|
GND |
Ground, (Đất) |
4.1.3 Ký hiệu, hàm BOOLE và bảng chân lí của những cổng Lôgic cơ bản.
|
Interver |
AND |
NAND |
OR |
NOR |
EX-OR |
EX-NOR |
|||||||
|
|
|
|
|
|
|
|
|||||||
|
Y= |
Y=A.B |
Y= |
Y=A+B |
Y= |
Y= |
Y= |
|||||||
|
A |
Y |
A B |
Y |
A B |
Y |
A B |
Y |
A B |
Y |
A B |
Y |
A B |
Y |
|
L H |
H L |
L L H L L H H H |
L L L H |
L L H L L H H H |
H H H L |
L L H L L H H H |
L H H H |
L L H L L H H H |
H L L L |
L L H L L H H H |
L H H L |
L L H L L H H H |
H L L H |
4.1.4 Thiết kế mạch điện ứng dụng với họ IC 74xx.
a. Nguồn nuôi:
Để tổng trở của nguồn nuôi được giữ thấp, cần phải có những tụ điện mắc ngữa hai cực. Đó là các tụ gốm có giá trị từ 1mF đến 100mF. Để tụ có thể đạt hiệu quả cao nên nối chúng càng gần mạch in càng tốt. Cứ 4 đến 6 IC thì cần một tụ điện, các tụ điện này cần có tính cao tần tốt, mặt khác góc hao của tụ điện (tg) phải khá lớn để các dao động được hình thành bởi các tụ và độ tự cảm của mạch in được suy giảm mạnh.
b. Tải điện dung:
Tải điện dung cho các mạch TTL không được vượt quá 100pF. mục đích để những ngõ ra không quá tải với dòng nạp và phóng điện, các mức logic được đảm bảo. trường hợp cần làm trễ tín hiệu với những tụ điện khá lớn nên mắc vào đấy điện trở=270 Ω cho loại Schottky 74S và R= 1 kilôôm cho loại power Schottky 54LS/74LS.
c. Điốt khoá ở ngõ vào ( Input Clamping Diode):
ở ngõ vào cổng TTL đều có Diode khoá, từ loại 74L, mục đích để triệt tiêu bớt các điện áp âm từ các tín hiệu phản hồi, do đó nhiễu hệ thống bị ngăn chặn.
d. Các nối song song các ngõ ra:
Để nâng cao Fan – out chỉ được nối cao nhất hai ngõ ra hoặc hai ngõ vào với nhau. Để biết chính xác sự phân bố dòng điện, chỉ nên nối hai cổng song song với nhau khi cả hai cổng cùng trong IC.
e. Dây đất:
để tránh sự sụt áp trên dây đất , mạch điện phải được thiết kế sao cho mạch đất có điện trở bé và độ tự cảm bé. Mạch đất và mạch nối điện áp nguồn Vcc phải có độ rộng ít nhất là 2,5mm để sự ảnh hưởng của hiệu ứng ngoài ra được giữ thật thấp. Mạch điện với độ rộng từ 0,5 đến 1 mm có độ tử cảm L = 10nH/cm.
f. Những ngõ vào không dùng tới:
Những ngõ vào cổng AND và NAND nên nối với VCC qua một điện trở 1 kilôôm. Những ngõ vào của cổng OR và NOR nên nối với đất. Ngõ vào của các lôgic khác( flip flop, bộ đếm..) nên nối đất.
4.1.5 Các đặc trưng kỹ thuật tiêu biểu của những họ TTL.
Mỗi họ TTL có những đặc điểm riêng khác nhau ở những điểm quan trọng : công suất tiêu tán, vận tốc và khả năng làm việc với tải điện dung. Hình vẽ.
|
Loại |
Đầu ra |
||||
|
Mức tích cực |
Trở kháng đầu ra |
Dòng ra |
Điện áp chịu đựng |
Công suất tiêu tán |
|
|
SN5446A |
Low |
Open-collector |
40mA |
30 V |
320 mW |
|
SN5447A |
Low |
Open-collector |
40 mA |
15 V |
320 mW |
|
SN5448 |
High |
2kΩ -pull-up |
6,4 mA |
5,5 V |
265 mW |
|
SN54LS47 |
How |
Open-collector |
12 mA |
15 V |
35 mW |
|
SN54LS48 |
High |
2 kΩ -pull-up |
2 mA |
5,5 V |
125 mW |
|
SN54LS49 |
High |
Open-collector |
4 mA |
5,5 V |
40 mW |
|
SN7446A |
Low |
Open-collector |
40 mA |
30 V |
320 mW |
|
SN7447A |
Low |
Open-collector |
40 mA |
15 V |
320 mW |
|
SN7448 |
High |
2 kΩ -pull-up |
6,4 mA |
5,5 V |
256 mW |
|
SN74LA47 |
Low |
Open-collector |
24 mA |
15 V |
35 mW |
|
SN74LA48 |
High |
2 kΩ -pull-up |
6 mA |
5,5 V |
125 mW |
|
SN74LA49 |
High |
Open-collector |
8 mA |
5,5 V |
40 mW |
\
4.2. IC 7414
- IC 74LS14 bao gồm 6 cổng độc lập, mỗi một cổng thực hiện hàm lôgic ngược, mỗi đầu vào có hiện tượng trễ khi mà có ảnh hưởng nhiễu (tác nhân ngây nhiễu) từ bên ngoài và sự biến đổi từ tín hiệu đầu vào chậm sang nhanh khi có sự biến đổi tự do của đầu vào.
- Vi mạch 74LS14N: là 1 trigơ smit thực chất đây là bộ biến đổi dạng xung sin thành xung vuông, hay thường gọi việc đưa qua vi mạch này là việc sửa méo, bù đắp các sườn xung giúp xung đầu ra luôn là xung vuông trạng thái không nhiễu .
- Cấu trúc bên trong vi mạch này chủ yếu dùng bán dẫn (transistor) mắc thành mạch khuyếch đại vi sai ghép Emiter. Vì vi mạch này thuộc họ TTL (transistor – transistor - logíc ). Tín hiệu khi cho qua vi mạch này nâng cao được biên độ URamin (Ura min >> UCEBH) của transistor bên trong vi mạch, đồng thời làm tăng tần số chuyển mạch . Bình thường đầu vào các cổng vi mạch luôn ở mức logíc cao đầu ra luôn ở mức thấp .
- Các giá trị lớn nhất
|
Ký hiệu |
Tham số |
Min |
Max |
Đơn vị |
|
VCC |
Điện áp nguồn |
4,75 |
5,25 |
V |
|
IOH |
Dòng đầu ra mức cao |
|
-15 |
mA |
|
IOL |
Dòng đầu ra mức thấp |
|
24 |
mA |
|
TA |
Khoảng nhiệt độ cho phép |
0 |
170 |
o C |
|
Ký hiệu |
Tham số |
Điều kiệnKiểm tra |
|
Đơnvị |
|
|
Min |
Max |
|
|||
|
VR++ |
Ngưỡng điện áp thuận |
VCC=0,5V |
0,5 |
1 |
V |
|
VR-- |
Ngưỡng điện áp ngược |
VCC=0,5V |
1,4 |
1,9 |
V |
|
Vr+- VR- |
Mức trễ |
VCC=0,5V |
0,4 |
|
V |
|
VIG |
Điện áp Gim đầu vào |
VCC=min,VON=-18mA |
|
-1,5 |
V |
|
VIH |
Mức điện áp vào cao |
VCC=min,VON=-0,4mA V1=0,5V |
27 |
|
V |
|
VIL |
Mức điện áp vào thấp |
VCC=min,VON= 8 mA V1=1,9V |
|
0,4 |
V |
|
VCC=min,VON=4mA V1=1,9V |
|
0,5 |
|||
|
IIH |
Dòng điện vào mức cao |
VCC= max, VIN= 2,7 V |
|
20 |
mA |
|
VCC= max, VIN= 7,0 V |
|
0,1 |
mA |
||
|
IIL |
Dòng điện vào mức thấp |
VCC= max, VIN= 0,4 V |
|
-0,4 |
mA |
|
Io |
đầu ra gắn mạch dòng |
VCC=max, V0= 0 (Note 1) |
-20 |
-100 |
mA |
|
ICC |
|
VCC= Max |
|
16 |
mA |
|
|
21 |
||||
5. Quang trở
- Điện trở quang hay Tế bào quang dẫn, hoặc tên thường gọi là Quang trở là một trong các loại cảm biến quang học khá gần gũi và có nhiều ứng dụng trong thực tế.
Cấu trúc bề mặt và hình dạng bên ngoài của quang trở:
- Đặc trưng của Điện trở quang là sự phụ thuộc của giá trị điện trở vào thông lượng bức xạ và phổ của bức xạ đó. Cơ sở vật lý của Điện trở quang là hiện tượng quang dẫn (vì lý do đó mà Quang trở còn có tên là tế bào quang dẫn). Do kết quả của hiệu ứng quang điện nội: hiện tượng giải phóng hạt tải điện trong vật liệu dưới tác dụng của ánh sang làm tăng độ dẫn điện của vật liệu.
5.1 Vật liệu chế tạo:
Cảm biến quang (trong đó có quang trở) thường được chế tạo bằng các bán dẫn đa tinh thể đồng nhất hoặc đơn tinh thể, bán dẫn riêng hoặc bán dẫn pha tạp. Ví dụ:
+ Đa tinh thể: CdS, CdSe, CdTe, PbS, PbSe, PbTe
+ Đơn tinh thể: Ge, Si tinh khiết hoặc pha tạp Au, Cu. Sb, In
SbIn, AsIn, Pin, CdHgTe
Vùng quang phổ làm việc của các vật liệu quang dẫn.
5.2 Hai đặc trưng cơ bản của điện trở quang:
5.2.1 Điện trở:
- Giá trị điện trở tối RC0_phụ thuộc vào 4 yếu tố: dạng hình học, kích thước, nhiệt độ và bản chất lý hóa của vật liệu quang dẫn. Các chất PbS, CdS, CdSe có điện trở tối rất lớn (từ 104 W đến 109 W ở 25o C), trong khi đó SbIn, SbAs, CdHgTe lại có điện trở tối tương đối nhỏ (từ 10 W đến 103 W ở 25o C). Điện trở RC của cảm biến giảm rất nhanh khi bị chiếu sáng - độ rọi tăng lên.
- Các tính chất của một quang trở có thể biểu diễn bằng một mạch tương đương, trong đó điện trở tối RC0 mắc song song với RCP xác định bởi hiệu ứng quang điện do chiếu sang co dạng:
RCP = aF-g
- Trong đó a là hệ số phụ thuộc vào vật liệu, nhiệt độ và phổ bức xạ, g có giá trị từ 0,5 đến 1.
- Vậy khi chiếu sáng điện trở quang có giá trị
- Sự phụ thuộc của điện trở vào thông lượng ánh sáng không tuyến tính. Tuy nhiên có thể tuyến tính hóa nó bằng cách sử dụng một điện trở phụ mắc song song với tế bào quang dẫn.
5.2.2 Độ nhạy của quang trở:
Biểu thức độ nhạy:
Trong đó: - U là điện áp đặt vào quang trở
- I là dòng điện chạy qua quang trở
- F là thông lượng ánh sáng
- a là hệ số phụ thuộc vào vật liệu, nhiệt độ và phổ bức xạ
Từ biểu thức trên ta thấy:
- Điện trở quang là một cảm biến không tuyến tính, độ nhạy của nó giảm khi bức xạ tăng (trừ trường hợp đặc biệt khi )
- Độ nhạy tỉ lệ thuận với điện áp đặt vào, điều này chỉ đúng khi điện áp đặt vào đủ nhỏ (vì nhiệt độ sẽ làm giảm độ nhạy).
- Trong trường hợp sử dụng bức xạ đơn sắc, đối với thông lượng bức xạ cho trước thị dòng điện I phụ thuộc vào
5.3. Ứng dụng của quang trở
- Dựa vào đặc điểm của quang trở là khi có ánh sáng chiếu vào sẽ làm cho điện trở ủa nó giảm đi và phụ thuộc vào thông lượng của ánh sáng. Vì thế người ta có thể ứng dụng để điều khiển các mạch đóng, ngắt điện trong các hệ thống chiếu sáng hoặc có thể ứng dụng tạo xung điện có xung ánh sáng chiếu vào nó.
- Để điều khiển đóng ngắt mạch điện người ta có thể nối trực tiếp nó với cuộn hút của Rơle và nó đóng vai trò như một công tắc. Hoặc làm điện trở phân cực cho một Transistor làm việc vở chế độ khoá.
a) Mắc trực tiếp b) Phân cực cho Transistor
- Người ta cũng có thể dùng để điều khiển đèn chớp theo ánh sáng được ứng dụng trong kỹ thuật chụp ảnh.
- Thu xung tín hiệu quang biến đổi xung tín hiệu quang thành xung điện biến thiên trên điện trở quang theo sự ngắt quãng của xung ánh sáng. Người ta ứng dụng nguyên lý này để thiết kế mạch đo tốc độ quay của động cơ hoặc để đếm sản phẩm trên dây chuyền.
Khi tính toán thiết kế mạch điều khiển dùng quang trở ta cần quan tâm đến các yếu tố cơ bản của điện trở quang được sủ dụng và đặc tính quang trở của nó. Có như vậy mạch điện được lắp mới hoạt động theo yêu cầu
Các thông số của điện trở quang bao gồm:
- Điện áp đặt vào cực đại US
- Công suất cực đại PMax
- Điện trở tối R0
- Điện trở sáng Rill
ví dụ loại LDR 03 có các thông số đặc trưng như sau:
6. Khuếch đại thuật toán và so sánh tương tự
6.1. khuếch đại thuật toán
6.1.1. Các tính chất và tham số cơ bản của khuếch đại thuật toán
a. Các tính chất cơ bản
Giữa bộ khuếch đại thuật toán và bộ khuếch đại thông thường về cơ bản không có sự khác nhau. Cả hai loại đều được dùng để khuếch đại điện áp, dòng điện hoặc công suất trong khi tính chất của bộ khuếch đại thông thường phụ thuộc và kết cấu bên trong của mạch thì tác dụng của bộ khuếch đại thuật toán có thể thay đổi được và chỉ phụ thuộc vào các linh kiện mắc bên ngoài mạch để thực hiện được điều đó thì các bộ khuếch đại thuật toán phải có hệ số khuếch đại rất lớn, trở kháng vào rất lớn, trở kháng ra rất nhỏ. Bộ khuếch đại thuật toán được biểu diễn như trong hình trên . Trong đó, Ud điện áp vào hiệu; UP , IP điện áp và dòng điện vào cửa thuận, UN , IN điện áp và dòng điện vào cửa đảo, UR , IR điện áp và dòng điện ra.
Bộ khuếch đại thuật toán khuếch đại hiệu điện áp Ud = UP - UN với hệ số khuếch đại K0 > 0. Do đó điện áp ra :
Nếu UN = 0 thì Ur = K0.Up lúc này điện áp Ur đồng pha với điện áp vào UP, vì vậy người ta gọi cửa P là của vào không đảo hoặc là cửa vào thuận của bộ khuếch đại thuật toán và kí hiệu bởi dấu cộng “ +”.
Tương tự như vậy, khi UP = 0 thì:
Vì điện áp đầu ra ngược pha với điện áp đầu vào, nên đầu vào N được gọi là đầu vào đảo của bộ khuếch đại thuật toán và ký hiệu bởi dấu “-”. Ngoài ra bộ khuếch đại thuật toán còn có hai cửa để đấu với nguồn cung cấp đối xứng và các cửa để chỉnh lệch không và bù tần số .
Một bộ khuếch đại thuật toán lý tưởng , có những tính chất sau:
+Trở kháng vào
+Trở kháng ra
+ hệ số khuếch đại
b Cấu trúc bên trong của bộ khuếch đại thuật toán
Cấu trúc bên trong của các bộ khuếch đại thuật toán rất khác nhau tuỳ thuộc vào mục đích ứng dụng của chúng. Dù cấu trúc cụ thể thế nào chúng cũng phải thoả mãn những yêu cầu cơ bản: hệ số khuếch đại lớn, lệch không nhỏ, các dòng tĩnh nhỏ, trở kháng vào lớn, trở kháng ra nhỏ, đầu vào đối xứng và điện áp ra ở chế độ tĩnh bằng không.
Căn cứ vào những yêu cầu trên, đưa ra sơ đồ cấu trúc tổng quát của bộ khuếch đại thuật toán như hình vẽ dưới đây.
Sơ đồ cấu trúc tổng quát bộ khuếch đại thuật toán.
Để có đầu vào đối xứng, tầng vào bao giờ cũng là một tầng khuếch đại vi sai có dòng tĩnh nhỏ, trở kháng vào lớn và cho phép mắc thêm mạch bù trôi ở ngoài.
Tầng thứ hai thường cũng là một tầng khuếch đại vi sai cho phép chuyển từ đầu vào đối xứng sang đầu ra không đối xứng.
Các tầng trung gian có nhiệm vụ khuếch đại tín hiệu đủ lớn để kích thích cho tầng cuối.
Tầng cuối phải đảm bảo dòng ra lớn, điện áp ra lớn và điện trở ra nhỏ. Mạch điện hay dùng cho tầng này là mạch đẩy - kéo bù kèm theo một mạch hạn dòng.
Để đảm bảo yêu cầu về điện áp ra bằng không ở chế độ tĩnh phải có mạch dịch mức nằm trong một phần mạch nào đó của bộ khuếch đại thuật toán. Biết rằng, khi dùng các tầng khuếch đại có các tranzitor npn, thì điện thế tĩnh lần lượt của các tầng bị đẩy dần về phía các giá trị dương. Mạch dịch mức có nhiệm vụ đẩy lùi điểm tĩnh về phía âm.
Không phải khi nào bộ khuếch đại thuật toán cũng có đầy đủ các tầng như trên sơ đồ khối trên. Sau đây sẽ xét một số cấu trúc điển hình của bộ khuếch đại thuật toán.
6.2 Bộ so sánh điện áp tương tự vả ứng dụng
- Mạch so sánh điện áp cho một bứơc nhảy điện áp đẩu ra để chỉ kết quả đầu ra của hai đại lượng đầu vào. có hai loại mạch so sánh :
+ Mạch so sánh số nhị phân hay còn gọi là mạch so sánh số
+ Mạch so sánh tương tự so sánh một điện áp với điện áp chuẩn có độ lớn cho trước.
- Như đã nói ở trên thì mạch so sánh điện áp tương tự dùng để so sánh điện áp chuẩn có độ lớn cho trước Uch và điện áp đầu vào UV. Khi UV = Uch thì điện áp UR ở đầu ra sẽ chuyển từ mức cao xuống mức thấp hay ngược lại vậy tín hiệu đầu ra của mạch so sánh tương tự là tín hiệu logic, còn tín hiệu ở đầu vào là tín hiệu tuơng tự ( analog).
- Hiện nay phần tử cơ bản để thực hiện việc so sánh điện áp là khuếch đại thuật toán, làm việc ở chế độ khoá. Vì vậy, các thông số đặc trưng cho bộ so sánh cũng chính là các thông số đặc trưng của khuếch đại thuậtn toán bao gồm:
+ Độ nhạy mạch so sánh, chính là độ nhạy của khóa khuếch đại thuật toán
+Thời gian lật trạng thái của mạch so sánh. Nó chính là thời gain đóng mở Tđm của khuếch đại thuật toán
+ Hai mức logic L, H ở đầu ra của mạch so sánh thường cũng chính là hai điện áp bão hoà ±Ubh ở đầu ra của khuếch đại thuật toán. nếu không dùng điện áp một chiều đối xứng thì hai mức logic ở đầu ra của mạch so sánh sẽ tương ứng với điện áp 0V và điện áp bão hoà +Ubh = +UCC – (3 4V). Cũng có thể mạch so sánh cho hai mức logic L, H ở đầu ra có thể lựa chọn theo yêu cầu sử dụng
- Theo cấu trúc mạch so sánh tương tự chia làm hai loại
+ Mạch so sánh hở (còn gọi là mạch so anhs không trễ ). Sơ đồ cấu trúc hở không có sự phản hồi điện áp ở đầu ra về cửa vào.
+ Mạch so sánh vòng kín (còn gọi là mạch so sánh trễ) sơ đồ cắu trúc có vòng kín, có sự phản hồi dương của điện áp đầu ra về cửa vào
6.2.1. Mạch so sánh hở:
* Xét mạch so sánh hở đảo :
............................................
Hệ số khuếch đại vi sai AD cảu khuếch đại thuật toán rất lớn lên độ nhạy chỉ khoảng vài trục . Gần đúng coi 0, mạch sẽ lật trạng thái khi UD = 0, nghĩa là uV = Uch. Ta có đặc tính truyền đạt ur(UV) của mạch so sánh đảo như hình trên. Nếu tiếp tục tăng uv vượt quá ngưỡng Uch thì Ur cũng chỉ duy trì ởmức –Ubh. Bây giờ ta lại giảm uv . Cũng lý luật tương tựUrsẽ duy trì ở mức -Uch tới khi uv = thì điện áp hoàn toàn lật trạng thái sang mức +Uch. Nếu tiếp tuạc giảm uV thì điện áp ur vẫn tiếp tục duy trì ở mức +Uch
* Xét sơ đồ khônng đảo:
UD = uV - Uch
Cũng lý luận trên và coi 0 , ta có đặc tính truyền đạtur(uV) của mạch như trên.
- mạch so sánh điện áp hở cớ những nhược điểm sau đây:
+ Độ nhạy và thời gian lật trạng thái của mạch không đủ khi có yêu cầu cao.
+ Ngưỡng đóng Uđ và ngưỡng mở Um là như nhau và bằng Uch. ( Uđ = Um = Uch). do vậy mạch làm việc không ổn định khi có tác động nhiễu.
- Để khắc phục nhược điểm trên thì ta sử dụng mạch điện so sánh có trễ.
6.2.2. Mạch so sánh có trễ(Trigơ Smith)
Mạch có cấu trúc vòng kín với đường phản hồi dương nên thúc đẩy nhanh quá trình chuyển trạng thái; đặc tính truyền đạt có ngưỡng mở và ngưỡng đóng phân biệt. (Uđ ≠ Um).
* Xét sơ đồ Trigơ Smith đảo: Ta thấy mạch có phản hồi dương, với điện áp phản hồi :
Nên điện áp ur chỉ có thể ở mức -Ubh hay +Ubh. Mặt khác, nếu coi độ nhạy 0, thì khi ur = UP thì mạch sẽ lật trạng thái, chuyển từ +Ubh sang -Ubh hoặc ngược lại. Nếu mạch đang ở trạng thái đóng với ur= +Ubh thì ngưỡng mở của mạch là:
Khi mạch đang ở trạng thái mở với ur = -Ubh thì ngưỡng đóng của nó là:
Như vậy ngưỡng đóng và ngưỡng mở của Trigơ Smith đảo tính theo Uđ và Um là phân biệt nhau ( bằng nhau về độ lớn nhưng khác nhau về dấu). Đặc tính truyền đạt của trigơ ta thắy, khi uv < Um trigơ ở trạng thái đóng với ur =+Ubh ; tới khi mà uv ≥ Um , trigơ chuyển về trạng thái mở với ur =- Ubh. Lúc này, để trigở quay về trạng thái đóng thì yêu cầu uv phải bằng hoặc nhỏ hơn ngưỡng đóng Uđ.
* Xét trigơ không đảo: mạch có phản hồi dương với điện áp phản hồi
Và nó sé lật trạng thái khi uP = 0. Đặc tính truyền đạt của trigơ cho dưới đây với ngưỡng đóng :
Và ngưỡng mở:
6.2.3. ứng dụng của mạch so sánh tương tự
Dưới đây là một vài ứng dụng chính của mạch so sánh tương tự.
* Dùng để phát hiện và báo hiệu đại lượng vật lý cần theo dõi đã đạt được giá trị ngưỡng
7. Bộ vi xử lý AT 89C51
Vi xử lý AT89C51
AT89C51 là một loại vi xử lý 8 bit loại CMOS có tốc độ cao và công suất thấp với bộ nhớ Flash có thể lập trình được, được sản xuất bởi hãng Atmel.
Sơ đồ chân của AT89C51
Sơ đồ khối
Đặc trưng của AT89C51 như sau:
- 4 KB bộ nhớ Flash có thể lập trình lại với chu kỳ 1000 lần đọc/xóa
- Hoạt động được trong xung nhịp từ 0Hz đến 24Mhz
- 128x8 bit Ram nội
- 32 đường xuất nhập lập trình được
- Hai timer/counter 16 bit
- Mạch clock và bộ dao động trên chip
Chi tiết về cấu tạo và tập lệnh của chip này có thể tìm hiểu trong datasheet.
CHƯƠNG IV:THIẾT KẾ MẠCH ĐIỀU KHIỂN TỰ ĐỘNG
1.Sơ đồ khối và chức năng của các khối:
* Chức năng các khối :
+ Khối nguồn: cung cấp nguồn điện áp cho toàn mạch bao gồm điện áp 5V cho nuôi các IC số, điện áp 12 V cung cấp cho khối công suất
+ Bộ xử lý trung tâm: dùng chíp AT89C51 để xử lý các tín hiệu đầu vào, đưa tín hiệu đầu ra cho khối công suất điều khiển đảo chiều, dừng động cơ
+ Khối tín hiệu cảm biến: khối tín hiệu cảm biến là khối cảm nhận tín hiệu từ các hiện tượng thời tiết tự nhiên nắng, mưa, gió, ngày đêm để đưa ra các tín hiệu logic 0, 1 trước khi đưa vào để xử lý tín hiệu cảm biến.
+ Khối tín hiệu điều khiển bằng tay: khối tín hiệu điều khiển bằng tay sử dụng các nút nhấn để điều khiển đóng mở mái theo ý muốn.
+ Công tắc hành trình: dùng để giới hạn khẩu độ mở của mái che và ra tín hiệu ngắt động cơ khi mái gấp đến giới hạn.
+ Khối công suất: khối công suất là khối điều khiển đảo chiều động cơ
+ Động cơ: động cơ thực hiện chức năng là tải để kéo mái hiên.
2. Thiết kế chi tiết:
2.1. Khối mạch nguồn:
2.1.1 Sơ đồ nguyên lý:
2.1.2. Nguyên lý hoạt động:
Mạch điện nguồn được sử dụng để cung cấp nguồn nuôi cho các linh kiện trong mạch điện, ở trong mạch này sử dụng hai nguồn điện 12 V cung cấp cho động cơ và điện áp 5v cung cấp cho các linh kiện trong mạch, điốt D1 trong mạch có tác dụng chống xung ngược tác động lại nguồn điện, nguồn điện trong mạch phải sử dụng nguồn có dòng lớn 3A trở lên để cung cấp cho động cơ, điện áp 12v cung cấp cho động cơ lấy ngay từ sau cầu chỉnh lưu vì tại đó thì dòng điện chưa qua IC ổn áp do đó dòng điện vẫn đủ lớn để cung cấp đủ cho động cơ hoạt động, điện áp 5v lấy từ đầu ra của IC 7805 cho ta dòng điện là 1A đủ để cung cấp cho mạch điện
2.2.Khối xử lý trung tâm
Khối xử lý trung tâm dùng IC AT89C51, có chức năng thu nhận tín hiệu đầu vào từ các cảm biến, công tắc hành trình, nút ấn điều khiển bằng tay để đưa ra tín hiệu điều khiển đưa vào L298 để điều khiển động cơ quay vào hay ra dựa vào tín hiệu đầu vào.Chúng ta sẽ tiến hành viết chương trình điều khiển để nạp vào AT89C51 dưới dạng file .hex. Hai chân 18 và 19 được đấu với bộ tạo dao động bằng thạch anh 12MHz.
Các tụ gốm C1 và C2 có giá trị 30pF.
2.3. Khối tín hiệu điều khiển bằng tay
2.3.1. Sơ đồ nguyên lý:
2.3.2 Nguyên lý hoạt động:
Các nút ấn MO RA và CUON VAO được nối với các chân P1.1 và P1.2 của AT89C51, ra tín hiệu từ người điều khiển tới bộ xử lý trung tâm.
2.4 Khối công suất
2.4.1. Sơ đồ nguyên lý:
2.4.2 Nguyên lý hoạt động:
Khối công suất thực hiện nhiệm vụ điều khiển động cơ , ở trong đề tài này thì sử dụng IC điều khiển động cơ dòng lớn là L298 để điều khiển đảo chiều và điều chỉnh tốc độ động cơ ( IC L298 đã được trình bày ở phần trên).
Mạch điều khiển tốc độ động cơ được thực hiện qua IC điều khiển tốc độ động cơ L298, hai đầu vào điều khiển động cơ là hai tín hiệu quay thuận và quay ngược lấy từ khối xử lý trung tâm, đi vào chân 5 và chân 7 ICL298 sẽ quyết định chiều quay của động cơ . Điện áp để cấp cho động cơ sẽ được cấp riêng qua chân 4 của L298, điện áp đưa vào để điều khiển động cơ có thể lên đến 40 VDC, dòng điện cấp vào có thể lên đến 4A, tại hai đầu ra của L298 thì sẽ được đưa qua một bộ cầu điốt chịu dòng lớn ở mạch này thì sử dụng loại Điốt 1N5400
2.5 Khối mạch tín hiệu cảm biến:
Mạch điều khiển các tín hiệu cảm biến được sử dụng đều thực hiện dựa trên cơ
sở so sánh điện áp của hai giá trị điện áp đầu vào khác nhau sử dụng khuếch đại thuật toán đó là một đầu vào điện áp chuẩn UP và điện áp biến thiên UN của các tín hiệu cảm biến.
- Để phát hiện trời nắng thì sử dụng quang trở LDR 03
- Phát hiện ngày, đêm thì ta sử dụng quang trở LDR 03
- Phát hiện trời mưa thì ta sử dụng cảm biến độ ẩm không khí còn gọi là ẩm kế, trong mạch này ta dùng ẩm kế điện trở SYH-NC
- Để cảm nhận được gió to thì ta sử dụng thiết bị đo gió hình chén, có tín hiệu đầu ra là các mức điện áp khác nhau tùy theo tốc độ gió
Sở dĩ có như vậy bởi vì các linh kiện cảm biến nắng, mưa, ngay đêm (trừ gió có ngay giá trị điện áp ) đều là sự thay đổi giá trị điện trở khi có tác động vào cảm biến chẳng hạn để xác định ngày đêm thì dùng quang trở ngày thì điện trở giảm, đêm thì điện trở tăng, do vậy nhờ vào sự thay đổi giá trị điện trở ta có thể đưa qua một cầu điện trở để tạo ra các điện áp khác nhau đưa và mạch điện so sánh với điện áp chuẩn U
2.5.1. Mạch cảm biến ngày đêm:
1) Sơ đồ nguyên lý:
2) Nguyên lý hoạt động và khảo sát:
a. Nguyên lý hoạt động:
Mạch điện điều khiển tín hiệu ngày đêm sử dụng phương pháp so sánh điện áp, khi trời tối thì giá trị của quang trở LDR1 tăng nên điện áp UN < UP đầu ra của LM324 có mức Lôgic là 1 khi đó qua một cổng Logic Not của TrigơSmit (IC 74LS14) thì đầu ra sẽ ở trạng thái thấp không có tín hiệu ban ngày, khi trời sáng thì giá trị điện trở của quang trở giảm xuống điện áp UN > UP đầu ra của LM324 có mức logic là 0 khi đó qua một cổng Logic Not của TrigơSmit (IC7414) thì đầu ra sẽ ở trạng thái cao có tín hiệu ngày đến bộ xử lý tín hiệu cảm biến, Đây chỉ là nguyên lý hoạt động trong trường hợp lý tưởng. Trong mạch sử dụng biến trở VR1 có tác dụng điều chỉnh điện áp so sánh trong các trường hợp ngày đêm có sự không ổn định do thời tiết hay điều kiện môi trường tác động đến cảm biến điện trở quang như là chưa đến tối mà có một cơn mưa làm cho trời tối lại làm cho sự hoạt động của hệ thống không đúng theo yêu cầu là ban ngày nếu trời mưa thì phải đi ra do vậy ta phải điều chỉnh biến trở VR1 sao cho lúc đó UN > UP thì mạch lại hoạt động đúng yêu cầu.
b. Quá trình khảo sát:
Trường hợp 1: thực hiện trong điều kiện ngày, đêm lý tưởng. Trường hợp này được thực hiện lúc trời ban ngày hoàn toàn và đêm hoàn toàn, thông số của các tín hiệu như sau:
|
Thông số |
Trời ban ngày |
Trời tối |
|
LDR1 |
500 |
70 K |
|
R8 |
22k |
22k |
|
VR1 |
5k |
5k , |
|
R11 |
10k |
10k |
|
UN |
3,33V |
3,33V |
|
UP |
0,1V |
3.82V |
|
URa |
4,2V |
0V |
Truờng hợp 2:
Nếu khi trời đang ban ngày gặp một cơn mưa làm trời hơn tối gía trị điện trở của quang trở tăng nên không phải là 500 mà tăng nên đến 38 K thì điện áp UP = 3,5 V >UN(UN =3,33V) đầu ra không có tín hiệu ngày do vậy phải điều chỉnh biến trở VR1 sao cho UN > UP chẳng hạn là 4V thì giá trị của VR1 lúc này phải là: VR1 = 2,5 K .
2.5.2 Mạch cảm biến ánh nắng:1) Sơ đồ nguyên lý:
2) Nguyên lý hoạt động và khảo sát mạch điện:
a. Nguyên lý hoạt động:
Mạch điện xử lý tín hiệu nắng sử dụng phương pháp so sánh hai điện áp khác nhau, nguồn điện áp thứ nhất đó là điện áp được tạo ra từ cầu gồm RV2 và R1 điện áp này đưa vào chân “N ” làm chuẩn để đem đi so sánh với điện áp thứ hai đó là điện áp thay đổi theo giá trị của quang trở. Giá trị điện áp chuẩn là UN, điện áp tạo ra khi cường độ ánh sáng thay đổi là UP
Khi không có nắng thì điện trở của quang trở lớn, điện áp UN < UP do vậy mà đầu ra của LM324 ở mức lôgic 1 khi đó qua một cổng Logic Not của TrigơSmit (IC7414) thì đầu ra sẽ ở trạng thái thấp , khi có nắng thì giá trị điện trở của quang trở giảm xuống dẫn đến UN >UP đầu ra của LM324 ở mức logic 1 khi đó qua một cổng Logic Not của TrigơSmit (IC7414) thì đầu ra sẽ ở trạng thái cao, tín hiệu này tác động vào mạch điện xử lý tín hiệu cảm biến
b. Quá trình khảo sát.
Quá trình khảo sát mạch điện trên trực tế : quá trình khảo sát mạch điện có thể chạy thực tế: + Điều kiện khảo sát: * Trời nắng to
* Khảo sát tại chỗ giao nhau giữa trời nắng và trời râm
+ Giá trị các linh kiện trong mạch điện khi trời nắng và trời râm là:
|
Thông số |
Trời nắng |
Trời không nắng |
|
LDR2 |
80 |
400 |
|
R1 |
50k |
50k |
|
RV2 |
1,6k |
1,6k , |
|
R8 |
10k |
10k |
|
UN |
2V |
2V |
|
UP |
1,4V |
2,4V |
|
URa |
4,2V |
0V |
Từ bảng giá trị thực tế của mạch điện hoạt động thức tế như trên ta thấy rằng khi trời nắng thì đầu ra của LM324 tích cực ở mức thấp, còn khi trời râm thì đầu ra của LM324 tích cực ở mức cao đúng với phân tích trên lý thuyết.
2.5.3 Mạch cảm biến tín hiệu gió:
1) Sơ đồ nguyên lý:
2) Nguyên lý hoạt động
Mạch điện cảm biến tín hiệu gió nhận điện áp một chiều từ động cơ đưa vào đầu N để thực hiện việc so sánh với điện áp chuẩn tại chân P. Trong quá trình mô phỏng, ta dùng một nguồn một chiều để thay thế cho nguồn điện do động cơ điệ một chiều trong cảm biến gió sinh ra khi có gió, kết hợp với một công tắc 3 cực để mô phỏng hoạt động của khối cảm biến gió (như hình dưới đây)
Nguyên lý hoạt động của mạch như sau:
Khi chưa có gió thì điện áp UN < UP do vậy chân 8 của LM324 có mức lôgic là 1, đầu ra của 74LS14 có mức logic 0, mức logic này được đưa vào chân P3.3 của IC AT89C51, cho phép động cơ quay thuận để mở mái che ra (trong trường hợp có nắng hoặc mưa).
Khi điện áp do động một chiều tạo ra làm cho điện áp UN > UP ( hay gió mạnh) thì đầu ra của LM324 có mức logic 0, đi qua 74LS14 sẽ có mức logic 1, đi vào chân P3.3 của IC AT89C51, ngay lập tức ra tín hiệu cho động cơ quay nghịch để gấp mái che vào trong bất kể trường hợp trời có nắng hoặc mưa.
2.5.4 Mạch cảm biến tín hiệu mưa
1) Sơ đồ nguyên lý:
2) Nguyên lý hoạt động:
Mạch điện cảm biến nhận biết mưa được thiết kế dựa trên phuơng pháp so sánh điện áp hai đầu vào khuếch đại thuật toán LM324, với điện áp chuẩn được đưa vào chân P của LM324 thông qua cầu điện áp gồm có R3 và RV3.
Giá trị của điện áp chuẩn này có thể được thay đổi thông qua biến trở RV3 theo từng điều kiện thực tế của thời tiết, còn điện áp tại chân N là điện áp đựơc thay đổi theo độ ẩm của không khí thông qua cầu điện áp gồm ẩm kế và R10.
Dựa vào đặc tính của ẩm kế đó là khi độ ẩm thấp nghĩa là lúc trời không có mưa thì điện trở của ẩm kế nhỏ và khi có mưa độ ẩm tăng cao vậy khi đó ta nhận thấy giữu lúc trời mưa và không mưa thì tại đầu vào chân N có sự thay đổi điện áp vì vậy ta sẽ đặt điện áp chuẩn một giá trị nằm trong khoảng giữa hai giá trị điện áp tại chân N sao cho: không mưa thì UN < UP tại đầu ra của LM324 đi qua một Trigơ Smit nên không có tín hiện mưa (tín hiệu 1), khi trời mưa thì UN> UP tại đầu ra cảu LM324 đi qua một Trigơ Smit nên có tín hiệu mưa (tín hiệu 0) đưa đến chân P3.2 của bộ xử lý AT 89C51, ra tín hiệu mở mái che (trong trường hợp là ban ngày và không có gió).
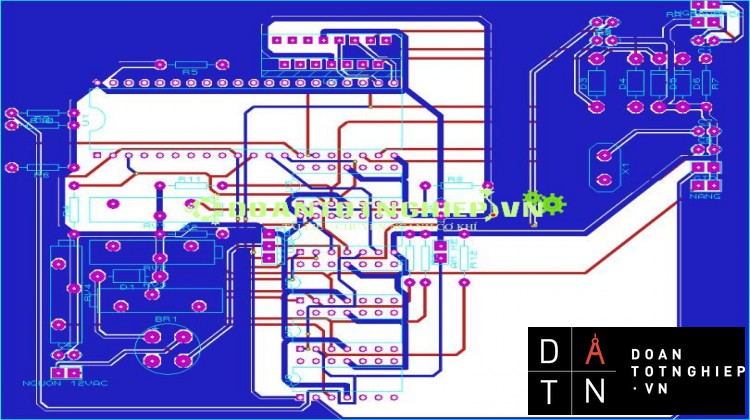
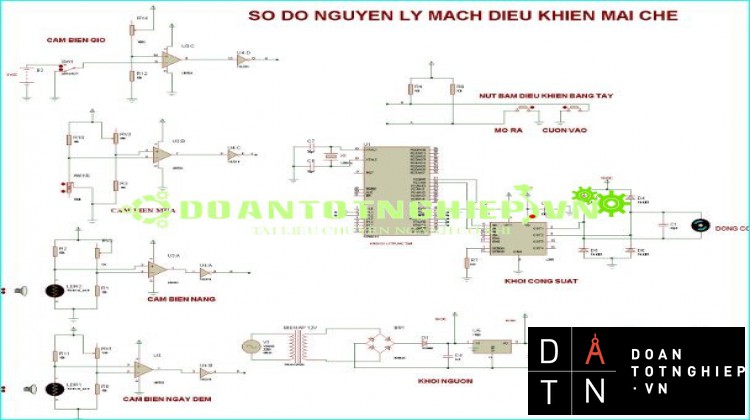
3.Thi công mạch và viết chương trình điều khiển
3.1. Sơ đồ nguyên lý:
3.2. Mạch in
3.3. Viết chương trình cho bộ xử lý trung tâm
Do AT89C51 chỉ nhận chương trình được nạp vào dưới dạng file có đuôi .hex hoặc .bin nên ta cần dịch chương trình viết bởi ngôn ngữ lập trình ra file có đuôi .hex hoặc .bin, thông thường ta dùng phần mềm Keil C để viết chương trình và dịch. Trong khuôn khổ đề tài này này, ta viết chương trình bằng ngôn ngữ C và tiến hành dịch ra file .hex bằng Keil C.
Trình biên tập và biên dịch Keil C
Dưới đây là chương trình điều khiển được viết bằng C:
#include
#include
#define mo P1_1 /*Gan cong tac mo voi chan P1.1*/
#define cuon P1_2 /*Gan cong tac cuon voi chan P1.2*/
#define nang P3_0 /*Gan tin hieu nang cuon voi chan P3.0*/
#define ngaydem P3_1 /*Gan tin hieu ngay dem cuon voi chan P3.1*/
#define mua P3_2 /*Gan tin hieu mua voi chan P3.2*/
#define gio P3_3 /*Gan tin hieu gio voi chan P3.3*/
#define HTRa P3_4 /*Gan tin hieu cong tac hanh trình gioi han ra voi P3.4*/
#define HTVao P3_5 /*Gan tin hieu cong tac hanh trình gioi han vao voi P3.5*/
bit PWM;
unsigned char dem=0;
unsigned char duty=50;
/*Ham Khoi Tao He Thong*/
void khoitaohethong()
{
EA=0;
TMOD=0x02; //Timer 0 mode 2(che do 8 bit tu nap lai)
TH0=-200/256;
TL0=-200%256;
EA=1;
TR0=1;
ET0=1;
}
/*Ham ngat tao xung PWM*/
void ngatT0(void) interrupt 1
{
TR0=0;
TF0=0;
dem++;
if(dem>=duty)
{
PWM=1;
}
else
{
PWM=0;
}
if(dem==100) dem=0;
TR0=1;
}
/*Ham Dung Dong Co*/
void stopdc(void)
{
P2_0=0;
P2_1=0;
P2_2=0;
P2_3=1;
P2_4=1;
}
/*Dieu Khien Mo Mai Che*/
void quaythuan(void)
{
P2_0=0;
P2_1=PWM;
}
/*Dieu Khien Thu Mai Che*/
void quaynghich(void)
{
P2_1=0;
P2_0=PWM;
}
/*Hàm chon che do (dong hoac mo mai che)*/
unsigned char n;
unsigned char chonchedo(void)
{
if((nang==1&&ngaydem==1&&gio==0)||(mua==0&&ngaydem==1&&gio==0)|| (mo==0&&gio==0)) n=2;
if(cuon==0||(nang==0&&mua==1)||ngaydem==0||gio==1) n=3;
switch(n)
{
case 0: {break;}
case 1: {stopdc();break;}
case 2: {quaythuan();
if (HTRa==0) stopdc(); break;}
case 3: {quaynghich();
if (HTVao==0) stopdc();break;}
}
return (n);
}
/*Chuong Trinh Chinh*/
void main()
{
khoitaohethong();
while(1)
{
chonchedo();
}
}
Chương trình sau khi được dịch ra file .hex có dạng như sau:
:06013B0001080001093279
:10011000C2AF758902E4F58C758A38D2AFD28CD221
:02012000A92212
:03000B000200EA06
:1000EA00C0E0C0D0C28CC28D0508E508C39509409E
:1000FA0004D2008002C200E508B46403750800D285
:06010A008CD0D0D0E032E1
:0B012200C2A0C2A1C2A2D2A3D2A4229C
:07012D00C2A0A20092A12272
:07013400C2A1A20092A0226B
:10009A0030B00630B10330B30F20B20630B10330AE
:1000AA00B30620910620B303750A0230920C20B0E1
:1000BA000320B20630B10330B303750A03E50A24FC
:1000CA00FE600914600E24027013800E12012D20A6
:1000DA00B40B800612013420B503120122AF0A22A2
:0800030012011012009A80FBAB
:0300000002000EED
:0C000E00787FE4F6D8FD758120020055D3
:10001A00020003E493A3F8E493A34003F68001F2F9
:10002A0008DFF48029E493A3F85407240CC8C333E7
:10003A00C4540F4420C8834004F456800146F6DFB6
:10004A00E4800B010204081020408090013BE47E0A
:10005A00019360BCA3FF543F30E509541FFEE493AB
:10006A00A360010ECF54C025E060A840B8E493A372
:10007A00FAE493A3F8E493A3C8C582C8CAC583CA9D
:10008A00F0A3C8C582C8CAC583CADFE9DEE780BE55
:0101410000BD
:00000001FF
Chương trình này được nạp vào AT89C51 thông qua các mạch nạp được kết nối với máy tính và chương
Tài Liệu Tham Khảo
- Tính toán hệ dẫn động cơ khí …………… Trinh Chất & Lê Văn Uyển
- Giáo trình kỹ thuật xung số ……………………………Lương Ngọc Hải
- Kỹ thuật điện tử số………………………….…..........Đặng Văn Chuyết
- Kỹ thuật số …………………………………………...Nguyễn Thuý Vân
- Kỹ Thuật điện tử ……………..............................................Đỗ Xuân Thụ
- Kỹ thuật mạch điện tử ……………………………….........Phạm Minh Hà
- Cơ sở kỹ thuật điện tử số ……….. ……Đại học Thanh Hoa - Trung Quốc
- Giáo trình Đo lường điện và cảm biến đo lường………....Nguyễn Văn Hoà
- Giáo trình lý thuyết và bài tập ngôn ngữ lập trình C………………… Nguyễn Đình Tê -Hoàng Đức Hải
- Họ vi điều khiển 89C51 …………………………………Phạm Trung
ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ THIẾT KẾ HỆ THỐNG MÁI CHE TỰ ĐỘNG, thuyết minh ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ HỆ THỐNG MÁI CHE TỰ ĐỘNG, THIẾT KẾ HỆ THỐNG MÁI CHE TỰ ĐỘNG




