Đồ án tốt nghiệp robot TAY MÁY CHUYỂN ĐỘNG THEO NGƯỜI


NỘI DUNG ĐỒ ÁN
Đồ án tốt nghiệp robot TAY MÁY CHUYỂN ĐỘNG THEO NGƯỜI
CHƯƠNG 1
TỔNG QUAN VỀ ROBOT
1.1. TÌNH HÌNH NGHIÊN CỨU TRONG VÀ NGOÀI NƯỚC
1.1.1. Giới thiệu về Robot:
Năm 1921, từ “Robot” xuất hiện lần đầu trong vở kịch “Rosum’s Universal Robots ” của nhà viết kịch viễn tưởng người Séc, Karel Capek. Trong vở kịch này, ông dùng từ “Robot”, biến thể của từ gốc Slavo “Robota”, để gọi một thiết bị lao công do con người (nhân vật Rosum) tạo ra.
Các nguyên tắc trên sau này trở thành nền tảng cho việc thiết kế robot:
Khía cạnh nhân văn và khía cạnh khoa học- kỹ thuật của việc sản sinh ra robot thống nhất ở một điểm: thực hiện hoài bão của con người là tạo ra thiết bị thay thế mình trong những hoạt động không thích hợp với mình như:
+ Các công việc lặp đi lặp lại, nhàm chán, nặng nhọc: vận chuyển nguyên vật liệu, lắp ráp, lau cọ nhà…
+ Trong môi trường khắc nghiệt, hoặc nguy hiểm: như ngoài khoảng không vũ trụ, trên chiến trường, dưới nước sâu, trong lòng đất, nơi có phóng xạ, nhiệt độ cao…
+ Những việc đòi hỏi độ chính xác cao như thông tắc mạch máu hoặc các ống dẫn trong cơ thể, lắp ráp các phần tử trong vi mạch…
+ Lĩnh vực ứng dụng của robot rất rộng và ngày càng được mở rộng thêm. Ngày nay, khái niệm về robot đã mở rộng hơn khái niệm nguyên thủy rất nhiều. Sự phỏng tác về kết cấu, chức năng, dáng vẻ của con người là cần thiết nhưng không còn ngự trị trong kỹ thuật robot nữa. Kết cấu của nhiều con robot khác xa với kết cấu các bộ phận của cơ thể người và chúng cũng có thể thực hiện được những việc vượt xa khả năng của con người.
Hình 1.1. Robot hàn điểm trong nhà máy sản xuất cơ khí
+ Bên cạnh đó con người cũng đang hướng đến việc chế tạo ra những con Robot có cơ cấu cũng như hình dáng giống với con người nhằm thực hiện những công việc đòi hỏi sự uyển chuyển của đôi tay cũng như những công việc bình thường của con người mà những cánh tay máy bình thường khó có thể thực hiện được.
Hình 1.2. Robot Asimo của Nhật Bản
+ Ngoài ra con người đang hướng tới tạo ra những thiết bị hỗ trợ cũng như thay thế các bộ phận bị mất của con người có cấu trúc cũng như chức năng tương tự với bộ phân đã mất đó nhằm giúp cho con người có thể có được những sinh hoạt bình thường.
Hình 1.3. Cánh tay giả cho người bị khuyết tật điều khiển thông qua bộ não.
Thành phần cấu tạo của Robot, các bộ phận chính bao gồm:
+ Các bộ phận điều khiển: Mạch điều khiển, cảm biến ..
+ Nguồn năng lượng: Ắc quy, pin, điện một chiều.
+ Các bộ phận thực hiện: Động cơ, xi- lanh,...
+ Truyền thông: Truyền phát tín hiệu từ các modul truyền thông điều khiển hoạt động của Robot.
1.1.2. Tình hình phát triển Robot trên thế giới
Thuật ngữ Robot được sinh ra từ trên sân khấu chứ không phải là từ trong phân xưởng nhà máy.
Những robot đầu tiên được đưa vào nghiên cứu, ứng dụng là những tay máy. Vào năm 1948 hãng General Mills chế tạo tay máy có cơ cấu tác động là những động cơ điện kết hợp với cữ hành trình. Đến năm 1954, tiếp tục phát triển tay máy sử dụng động cơ servo và có thể nhận biết được lực tác dụng lên khâu cuối, nhờ đó mà vào năm 1956 hãng General Mills cho ra đời tay máy hoạt động trong việc khảo sát đáy biển.
Năm 1968, General Electric, Robot có 4 chân nặng 1400 kg sử dụng động cơ đốt trong và có công suất 100 Hp.
Năm 1969, robot Shakey nhận dạng hình ảnh bằng camera.
Năm 1970, xe tự hành thám hiểm mặt trăng Lunokhod 1 được điều khiển từ Trái Đất.
Năm 1976, cánh tay robot đầu tiên được đưa lên tàu thám hiểm Viking của NASA trên sao Hỏa.
vMột số Robot mô phỏng giống con người trên thế giới:
ROBOT TỰ ĐỘNG
- ROBOT ATLAS:
- Atlas là một robot hình người hai chân được phát triển chủ yếu bởi công ty American RoboticsBoston Dynamics, với sự tài trợ và giám sát của Cơ quan Dự án Nghiên cứu Tiên tiến Cao cấp Hoa Kỳ (DARPA). Robot 1,8m được thiết kế cho nhiều công việc tìm kiếm và cứu hộ, và được công bố vào ngày 11 tháng 7 năm 2013.
- Atlas được dựa trên trước Boston Dynamics' PETMAN robot hình người. Được chế tạo bằng nhôm và titanium, nó có chiều cao khoảng 5,9 feet, nặng 330 pounds (150 kg) và được chiếu sáng với đèn LED xanh dương. Atlas được trang bị hai hệ thống tầm nhìn- một laser rangefinder và camera stereo, cả hai điều khiển bởi một máy tính off-board và có tay với kỹ năng vận động. Chi của nó có tổng cộng 28 độ tự do. Atlas có thể điều chỉnh địa hình gồ ghề và leo lên một cách độc lập bằng cách sử dụng các cánh tay và chân của nó, mặc dù phiên bản mẫu năm 2013 được gắn với nguồn cung cấp bên ngoài.
- Vào tháng 10 năm 2013, Boston Dynamics đã tải lên một video cho thấy Atlas có thể chịu được việc bị trúng đạn và cân bằng trên một chân.
- Năm 2014, robot Atlas được lập trình bởi sáu nhóm khác nhau sẽ tham gia vào thử thách Robot Robot của DARPA để kiểm tra khả năng thực hiện các nhiệm vụ khác nhau của robot, bao gồm: vào và ra khỏi xe, lái xe, mở cửa và sử dụng công cụ điện. Một loạt các robot khác cũng sẽ cạnh tranh. Cuộc thi được lấy cảm hứng từ thảm họa hạt nhân 2011 Fukushima Daiichi, và đã nhận giải thưởng 2 triệu USD cho đội chiến thắng.
- Trong năm 2015 DARPA Robotics Finals (hoặc Running Man) đứng thứ hai phía sau đội Kaist của Hàn Quốc và robot DRC- Hubo của họ bằng khoảng 6 phút, hoàn thành toàn bộ khóa học trong khoảng thời gian 50:26
- Atlas được thiết kế để hỗ trợ các dịch vụ khẩn cấp trong các hoạt động tìm kiếm và cứu hộ, thực hiện các nhiệm vụ như đóng van, mở cửa và vận hành thiết bị không hoạt động trong môi trường nơi con người không thể sống sót. Bộ Quốc phòng tuyên bố vào năm 2013 rằng nó không có quan tâm đến việc sử dụng robot cho chiến tranh tấn công hoặc tấn công.
- Trong cuộc thi Darpa năm 2015 của Atlas người máy không thể hoàn thành tất cả tám nhiệm vụ như sau:
+ Lái xe tiện ích tại địa điểm.
+ Du lịch đã tháo dỡ qua đống đổ nát.
+ Loại bỏ các mảnh vỡ chặn một lối vào.
+ Mở một cánh cửa và vào tòa nhà.
+ Leo lên một bậc thang công nghiệp và đi qua một lối đi công nghiệp.
+ Sử dụng một công cụ để vượt qua một tấm bê tông.
+ Xác định vị trí và đóng van gần một ống rò rỉ.
+ Nối ống dẫn lửa vào thanh chống và bật van.
- ROBOT ASIMO:
- Trong suốt 20 năm miệt mài nghiên cứu và sáng tạo, các kỹ sư thuộc tập đoàn Honda cuối cùng cũng đã cho ra đời sản phẩm được cho là gần giống con người nhất – ASIMO
- ASIMO viết tắt của Advanced Step in Innovative Mobility, là robot đầu tiên trên thế giới có khả năng leo cầu thang và đi lại một cách độc lập. Không chỉ vậy, nó có thể nhận diện khuôn mặt, giọng nói, cử chỉ điệu bộ, và có thể được điều khiển qua giọng nói. Với đôi tay của mình, ASIMO có thể bật tắt công tắc đèn, mở cửa, mang vác, đẩy xe... và rất nhiều những công việc không tên khác.
- Honda đã thiết kế ra ASIMO với mục đích tạo ra một người giúp việc đúng nghĩa cho con người, một robot có thể làm việc nhà, chăm sóc người cao tuổi, giúp đỡ những người khuyết tật trong cuộc sống sinh hoạt hàng ngày. Chỉ cao khoảng 1.3 mét, đúng bằng chiều cao của một người đang ngồi xe lăn, cùng với ngoại hình khá giống với một phi hành gia tý hon, điều này làm cho hình ảnh của ASIMO trở nên khá thân thiện và dễ gần.
- Bên cạnh đó, ASIMO còn được thiết kế ra để làm những việc quá nguy hiểm với con người như thăm dò ở những vùng nguy hiểm, phá bom mìn....
Các thông số kỹ thuật của ROBOT ASIMO:
|
Model |
2000, 2001, 2002 |
2004 |
2005 2007 |
2011 |
|
Mass |
54 kilograms (119 lb) |
48 kilograms (106 lb) |
||
|
Width |
45 centimetres (18 in) |
|||
|
Depth |
44 centimetres (17 in) |
37 centimetres (15 in) |
34 centimetres (13 in) |
|
|
Walking speed |
1.6 kilometres per hour (0.99 mph) |
2.5 kilometres per hour (1.6 mph) |
2.7 kilometres per hour (1.7 mph) |
|
|
Running speed |
N/A |
3 kilometres per hour (1.9 mph) |
6 kilometres per hour (3.7 mph) (straight) |
9 kilometres per hour (5.6 mph) |
|
Airborne time |
N/A |
0.05 seconds |
0.08 seconds |
|
|
Battery |
Nickel metal hydride |
Lithium ion |
||
|
Continuous operating time |
30 minutes |
40 mins to 1 hour (walking) |
1 hour (running/ Walking) |
|
|
Degrees of Freedom |
26 |
34 |
57 |
Degrees of Freedom |
|
Languages |
|
|
|
English & Japanese |
|
Images |
|
|||
ROBOT HOẠT ĐỘNG DỰA TRÊN CỬ CHỈ CON NGƯỜI
- ROBOT METHOD-2:
-
Method-2 là con robot khổng lồ cao đến 4 mét, nặng 1,5 tấn, được hợp tác phát triển bởi các chuyên gia đến từ công ty Hàn Quốc Hankook Mirae Technology và một nhà thiết kế bậc thầy đến từ Mỹ.
- Trong buồng điều khiển, người vận hành được trang bị một hệ thống đặc biệt, giúp họ có thể ra lệnh cho robot cử động cánh tay tương tự như cách họ làm. Hiện tại, Method-2 vẫn cần phải kết nối với nguồn điện, đồng thời được giữ thăng bằng nhờ treo vào một hệ thống trên mái nhà.
- Được biết, thiết kế của robot có sự góp sức của Vitaly Bulgarov, một nghệ sĩ từng cho ra đời những hình tượng nhân vật độc đáo trong một số tựa game của Blizzard, chẳng hạn như Starcraft II: Heart of the Swarm, World of Warcraft hay Diablo III. Ngoài ra, ông cũng tham gia vào lĩnh vực điện ảnh với các phim Robocop (2014), Transformers: Age of Extinction và Terminator Genisys.
- Tất nhiên, quân sự cũng là một trong các lĩnh vực mà Method-2 có thể được ứng dụng. Theo kế hoạch, Method-2 sẽ được bán ra bắt đầu từ cuối năm 2017, với giá khoảng 8,3 triệu USD mỗi con, chưa bao gồm chi phí vận chuyển.
- POWERED JACKET MK3
- Sagawa Electronics đang giải phóng khoảng cách giữa tưởng tượng và thực tế với một bộ khung robot, nó gọi là Power Jacket MK3 có khả năng bắt chước từng bước di chuyển của bạn.
- Power Jacket MK3 được giữ ánh sáng nhờ vào sự kết hợp của nhôm và sợi cacbon trong khung của nó. Nó nặng chỉ 25 kg (55 lb) mặc dù cao 2.25 m (7 ft 4 in). Bộ trang phục này sử dụng hệ thống master-slave , nơi mà cánh tay và chân của bạn được gắn vào các khớp nối động cơ, khi di chuyển, thúc đẩy chuyển động của chân tay tương ứng của bộ quần áo.
- Bộ khung có tổng cộng 14 động cơ. Hiện tại, cánh tay của nó có khả năng nâng khoảng 15kg (33 lb), nhưng vì lý do an toàn, chúng chỉ giới hạn đến 2kg (4.4lb).
1.1.3.Tình hình phát triển Robot ở Việt Nam:
Ngành tự động hóa trong nước mới chỉ ở những bước khởi đầu nên vẫn chỉ có rất ít những nghiên cứu về Robot như:
§
Cánh tay robot đoạt giải ở Mỹ của bạn Phạm Huy, học sinh lớp 11 trường THPT Quảng Trị.
- Việt Nam sẽ dùng robot để dạy tiếng anh.
Ngày 26/8, SoftBank Telecom Việt Nam đã ký kết hợp tác với Tổ chức giáo dục Hoa Kỳ (IAE) và FPT Software nhằm đưa robot NAO ứng dụng trong lĩnh vực dạy tiếng Anh tại Việt Nam.
Thông số kỹ thuật:
|
Nao V5 Evolution (2014) |
|
|
Chiều cao |
58 cm (23 inch) |
|
Cân nặng |
4,3 kg (9,5 lb) |
|
Cung cấp năng lượng |
Pin lithium cung cấp 48,6 Wh |
|
Tự trị |
90 phút (sử dụng chủ động) |
|
Các mức độ tự do |
25 |
|
CPU |
Intel Atom @ 1,6 GHz |
|
Tích hợp hệ điều hành |
NAOqi 2.0 ( Linux- based ) |
|
Hệ điều hành tương thích |
Windows , Mac OS , Linux |
|
Ngôn ngữ lập trình |
C + + , Python , Java , MATLAB , Urbi , C , .Net |
|
Cảm biến |
Hai máy quay HD, bốn micro, máy định vị sonar , hai máy phát và thu hồng ngoại , bảng quán tính, chín cảm biến xúc giác, tám cảm biến áp suất |
|
Kết nối |
Ethernet , Wi-Fi |
1.2. PHÂN LOẠI ROBOT
1.2.1. Phân loại theo dạng hình học của không gian hoạt động:
- Robot tọa độ vuông góc (Cartesian robot): có ba bậc chuyển động gồm 3 chuyển động tịnh tiến vuông góc.
Hình 1.4. Cartesian Robot
- Robot tọa độ trụ (cylindrical robot): là robot có ba bậc chuyển động chính gồm hai trục tịnh tiến và một trục quay.
Hình 1.5. Cylinderical Robot
- Robot tọa độ cầu (spherical robot):là robot gồm có một trục tịnh tiến và hai trục quay.
Hình 1.6. Spherical robot
- Robot khớp bản lề (articular robot): là robot có ba chuyển động cơ bản gồm ba trục quay.
Hình 1.7. Articular robot
1.2.2. Phân loại theo hệ dẫn động:
- Các động cơ được sử dụng là động cơ bước, DC servo, AC servo,… Robot này gọn nhẹ, chính xác, chạy êm.
- Robot dùng nguồn khí nén: hệ thống có tải trọng nhỏ, thực hiện chuyển động thẳng và quay. Robot này thường không có độ chính xác cao.
- Robot dùng nguồn thủy lực: hệ thống thường có tải trọng lớn và độ chính xác không cao lắm.
1.3. HƯỚNG NGHIÊN CỨU CHÍNH CỦA LUẬN VĂN:
1.3.1. Đặt vấn đề:
Trong luận văn này, nhóm chúng em sẽ giải quyết hai bài toán sau:
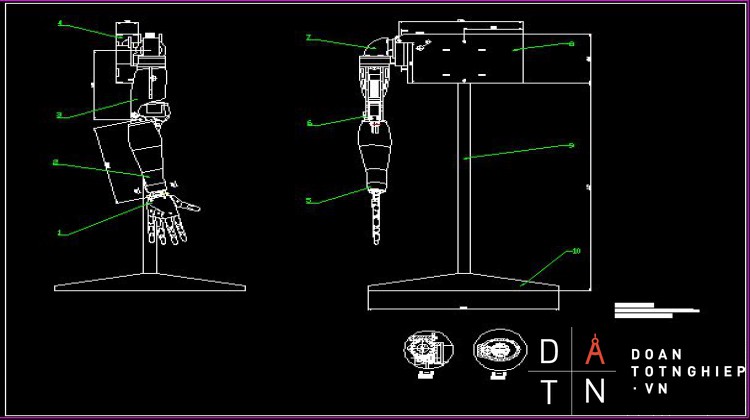
- Mô hình hóa hình học cánh tay Robot và khung điều khiển.
- Điều khiển tay Robot chuyển động mô phỏng theo chuyển động của tay người. Cánh tay Robot có khả năng cầm nắm vật thể cũng như có khả năng chuyển động gần giống với các chuyển động của tay người thông qua bộ điều khiển được gắn trên tay người.
1.3.2.Hướng giải quyết vấn đề
- Sử dụng các kiến thức đã được học trên lớp liên quan đến công nghệ cơ khí, truyền động cơ khí, vật liệu kỹ thuật, robot công nghiệp, kỹ thuật điện, công nghệ chế tạo máy và vi xử lý để xây dựng hoàn chỉnh mô hình cánh tay Robot.
- Phần cơ dựa trên ý tưởng từ kết cấu của một cánh tay người thật sự để thiết kế nên bản vẽ hoàn chỉnh và sử dụng công nghệ in 3D để tạo ra mô hình.
- Phần chuyển động của cánh tay chọn động cơ servor RC. Vì động cơ servo nhỏ gọn và truyền dẫn động có độ chính xác cao.
- Phần điều khiển:
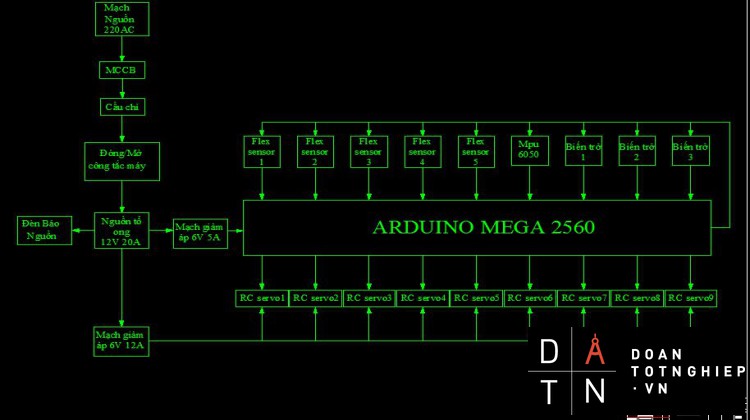
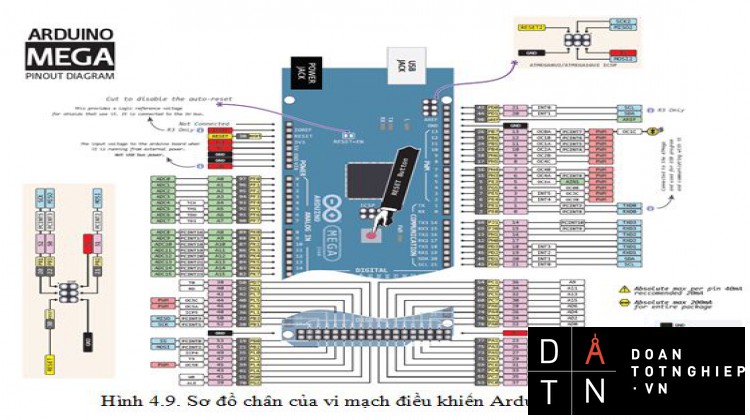
+ Bộ điều khiển trung tâm sử dụng board mega 2560.
+ Sử dụng cảm biến độ cong để điều khiển các động cơ ở ngón tay.
+ Cổ tay sử dụng cảm biến góc nghiêng để điều khiển động cơ xoay theo góc độ mà ta cần điều chỉnh.
+ Sử dụng biến trở để điều khiển góc quay của động cơ ở vị trí khớp khuỷu tay và khớp vai.
1.3.3. Giới hạn của luận văn
- Phần cơ của cánh tay robot có độ nhạy chưa cao.
- Mô hình còn bị giới hạn bởi khoảng cách điều khiển vẫn chưa được xa.
1.3.4. Kết quá mong muốn
- Mô hình hóa hình học cánh tay robot bằng lý thuyết nhằm kiểm tra độ chính xác của nó.
- Điều khiển cánh tay robot cầm nắm được một số vật thể theo yêu cầu.
- Cánh tay đảm bảo chuyển động theo đúng sự chuyển động của cánh tay người.
1.3.5Cách thức hình thành phương án thiết kế:
- Để đảm bảo robot có khả năng đưa tay gắp dược tới mọi vị trí trong không gian làm việc thì robot cần từ ba bậc tự do trở lên.
- Để tiếp cận bề mặt chi tiết theo hướng cụ thể thì cần thêm ít nhất hai bậc tự do, nếu chi tiết tay gắp có thể chuyển động theo các phương chuyển động quay thì robot chỉ cần bốn bậc tự do.
- Cánh tay người là một bộ phận nằm phía trên của chi trên của cơ thể con người. bô gồm nhiều bộ phận hợp thành: xương cánh tay, cơ delta, cơ cánh tay, cơ nhị đầu, cơ tam đầu, động mạch cánh tay, thần kinh cánh tay và một số cơ quan khác.
- Dựa trên những tài liệu có sẵn về cánh tay thực tế của con người nhóm đã đề ra một phương án phù hợp. Mô hình cánh tay robot có cấu tạo và cách thức hoạt động tương tự như tay người.
-
Cánh tay robot này nó đáp ứng được rất nhiều cho các môi trường, cũng như nhiều công việc khác nhau nhờ có sự linh hoạt của các ngón tay.
CHƯƠNG 6
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
6.1. LUẬN VĂN GIẢI QUYẾT ĐƯỢC CÁC VẤN ĐỀ
- Kết hợp được mô hình hóa hình học với thực nghiệm để hình thành nên cánh tay hoàn chỉnh.
- Phương án in 3D cho phần cơ khí là khả thi.
- Giải quyết trọn vẹn vấn đề điều khiển mô hình cánh tay robot chuyển động theo cử chỉ người.
- Tay Robot có thể nắm và thả sản phẩm theo cử chỉ của tay người, đồng thời điều khiển được cùng lúc nhiều khớp nên thao tác linh hoạt.
- Nội dung và phương pháp triển khai là một ví dụ cho bài toán thiết kế Robot có thể ứng dụng tốt cho việc hỗ trợ và tăng cường sức người.
6.2. NHƯỢC ĐIỂM CỦA ĐỀ TÀI
- Tay gắp chưa nâng được vật có tải trọng lớn.
- Cơ cấu chưa được tối ưu.
- Mô phỏng chuyển động còn một số hạn chế.
- Phần mạch điện tử chưa được ổn định.
6.3. ĐÁNH GIÁ KIẾN NGHỊ VÀ HƯỚNG NGHIÊN CỨU TIẾP THEO
- Phần kết cấu cơ khí:
+ Sử dụng các loại động cơ công suất lớn hoặc dùng xi- lanh khí nén nhằm tăng cường sức chịu tải của cánh tay.
+ Thay thế khung nhựa PLA bằng kim loại nhằm tăng sức bền của cánh tay.
- Phần điều khiển:
+ Sử dụng các boad mạch có tốc độ xử lý và tính ổn định cao.
+ Sử dụng các cảm biến có độ chính xác cao.
- Nghiên cứu hoàn thiện thành một con người máy với đầy đủ các bộ phận như con người nhằm phục vụ cho mục đích dân dụng, công nghiệp, quân sự,…
MỤC LỤC
CHƯƠNG 1: TỔNG QUAN VỀ ROBOT.. 1
1.1. TÌNH HÌNH NGHIÊN CỨU TRONG VÀ NGOÀI NƯỚC.. 1
1.1.1. Giới thiệu về Robot:1
1.1.2. Tình hình phát triển Robot trên thế giới3
1.1.3.Tình hình phát triển Robot ở Việt Nam:8
1.2. PHÂN LOẠI ROBOT. 10
1.2.1. Phân loại theo dạng hình học của không gian hoạt động:10
1.2.2. Phân loại theo hệ dẫn động:11
1.3. HƯỚNG NGHIÊN CỨU CHÍNH CỦA LUẬN VĂN:11
1.3.1. Đặt vấn đề:11
1.3.2.Hướng giải quyết vẫn đề. 11
1.3.3. Giới hạn của luận văn. 12
1.3.4. Kết quá mong muốn. 12
1.3.5Cách thức hình thành phương án thiết kế:12
CHƯƠNG 2: TÍNH TOÁN KẾT CẤU CHÍNH CỦA MÔ HÌNH.. 14
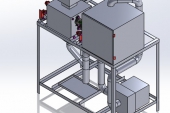
2.1. TÍNH TOÁN KẾT CẤU CHÍNH CỦA MÔ HÌNH.. 14
2.1.1. Ý tưởng nghiên cứu để hình thành mô hình.14
2.1.2. Tính toán lựa chọn kết cấu chính tay máy Robot 3 bậc tự do. 19
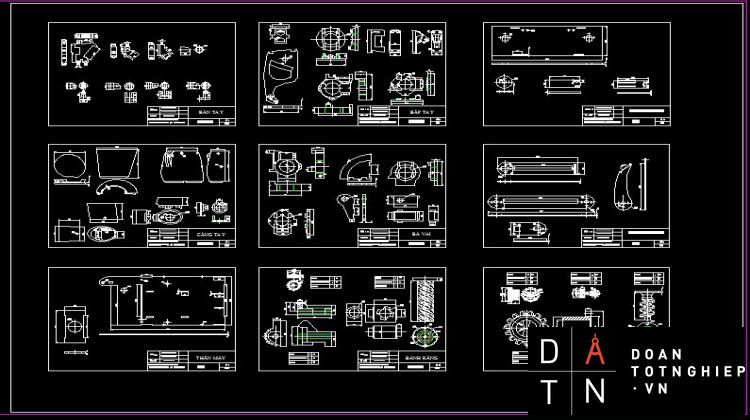
2.1.2.1. Phần bàn tay và cẳng tay:19
2.1.2.2. Phần khuỷu tay và cánh tay:29
2.1.2.2. Phần vai nối với cánh tay:39
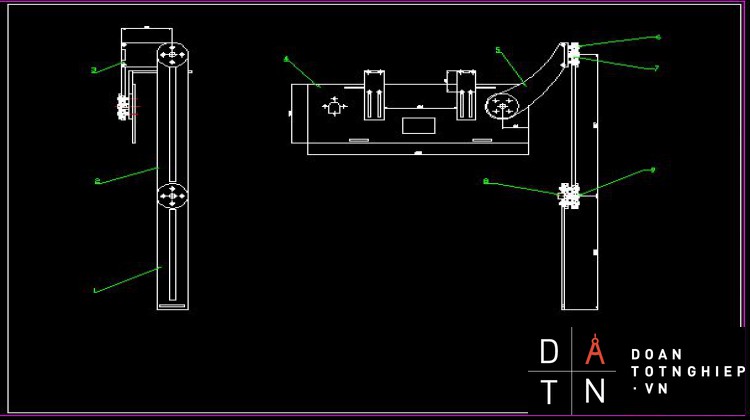
2.1.3. Tính toán kết cấu của khung điều khiển.45
2.2. TÍNH TOÁN ĐỘNG LỰC HỌC TAY MÁY :52
2.2.1. Hệ tọa độ trục và bảng Thông số D-H:51
2.3.1.1. Thiết lập hệ tọa độ trục :51
2.3.1.2. Bảng Denavit – Hartenberg :52
2.3.2. Tính toán các ma trận thuần nhất :52
CHƯƠNG 3:TÍNH TOÁN LỰA CHỌN TRUYỀN ĐỘNG CHO TOÀN BỘ MÔ HÌNH 55
3.1. TÍNH TOÁN LỰA CHỌN TRUYỀN ĐỘNG CƠ KHÍ:55
3.1.1. Nguyên lý hoạt động của tay máy Robot:55
3.1.2. Lựa chọn bộ truyền động. 55
3.1.2.1 Giới thiệu chung về bộ truyền động trục vít me. 55
3.1.2.2 Giới thiệu chung về bộ truyền động bánh vít trục vít.57
3.1.3. Các thành phần của mô hình tay máy Robot 3 bậc tự do:58
3.2. TÍNH TOÁN LỰA CHỌN TRUYỀN ĐỘNG ĐIỆN.. 61
3.2.1. Tính toán và chọn động cơ cho mô hình tay máy Robot 3 bậc tự do. 61
CHƯƠNG 4: THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN.. 63
4.1.GIỚI THIỆU TỔNG QUÁT VỀ SƠ ĐỒ KHỐI CỦA HỆ THỐNG.. 63
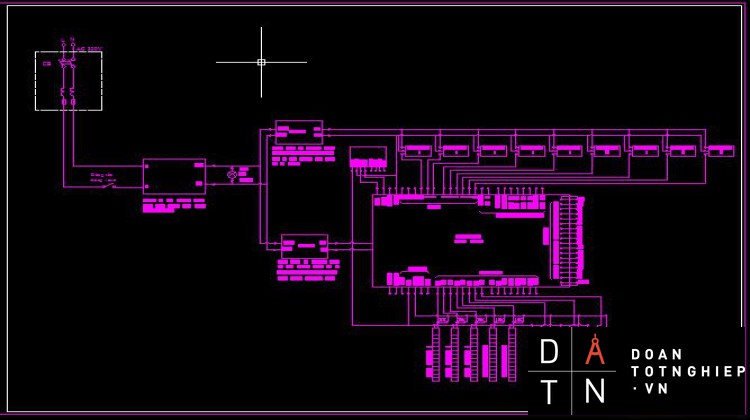
4.1.1. Sơ đồ khối:63
4.1.2. Giải thích sơ đồ khối:63
4.1.3. Tính toán chọn thiết bị.64
4.1.4. Giải thích nguyên lý hoạt động của từng thiết bị dựa trên sơ đồ khối:64
4.2. LƯU ĐỒ GIẢI THUẬT. 72
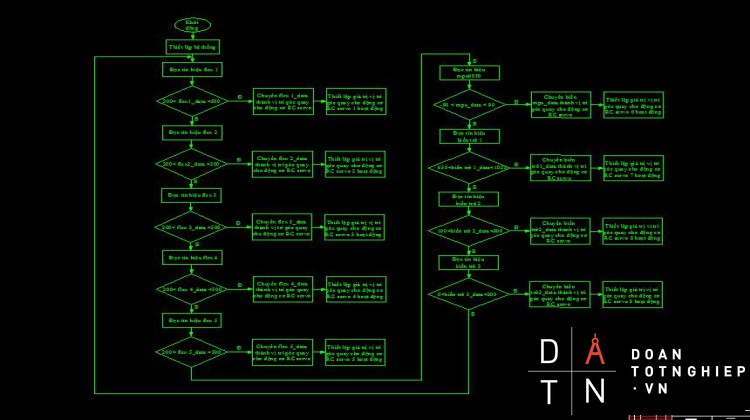
4.2.1. Lưu đồ giải thuật72
4.2.2. Giải thích lưu đồ giải thuật72
CHƯƠNG 5: MÔ HÌNH.. 75
5.1. MÔ HÌNH CÁNH TAY VÀ KHUNG ĐIỀU KHIỂN.. 75
CHƯƠNG 6 KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN.. 81
6.1. LUẬN VĂN GIẢI QUYẾT ĐƯỢC CÁC VẤN ĐỀ.. 81
6.2. NHƯỢC ĐIỂM CỦA ĐỀ TÀI81
6.3. ĐÁNH GIÁ KIẾN NGHỊ VÀ HƯỚNG NGHIÊN CỨU TIẾP THEO.. 81
PHỤ LỤC.. 82
DANH SÁCH HÌNH SỬ DỤNG... 85
TÀI LIỆU THAM KHẢO:. 87