ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ HỆ THỐNG TREO CẦU TRƯỚC TRƯỚC MC.PHERSON
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ HỆ THỐNG TREO CẦU TRƯỚC TRƯỚC MC.PHERSON
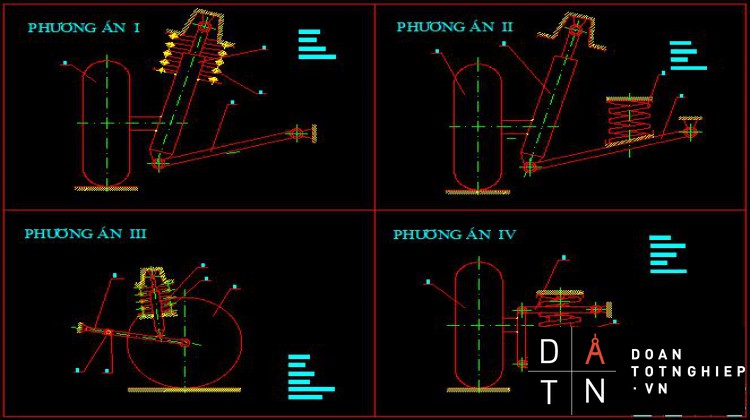
I. CHỌN PHƯƠNG ÁN THIẾT KẾ
Qua phần tổng quan, sau khi phân tích các ưu nhược điểm của các loại hệ thống treo, em thấy phương án bố trí hệ treo Mc.Pherson trên cầu trước và hệ treo đòn dọc có thanh ngang liên kết cho cầu sau là thích hợp nhất với xe du lịch, có vận tốc cao và có cầu trước chủ động. Bởi các hệ treo này vừa đơn giản về kết cấu, giá thành hạ mà vẫn đảm bảo được động học và tính chất dịch chuyển của bánh xe, hơn nữa lại dễ tháo lắp và sửa chữa. Mặt khác, với hệ treo MC.PHERSON thì khoảng không có được để bố trí động cơ và bộ phận truyền lực là lớn hơn.
Quy trình thiết kế bao gồm các bước sau :
- Xác định các thông số cơ bản.
- Động học : Đưa ra quan hệ động học hợp lý nhất.
- Động lực học : Tính toán, đưa ra được các kết cấu thoả mãn yêu cầu.
- Thiết kế : Lò xo.
- Thiết kế : Giảm chấn
- Thiết kế : Thanh ổn định.
- Kiểm bền một số chi tiết.
II. XÁC ĐỊNH CÁC THÔNG SỐ CƠ BẢN CỦA HỆ TREO :
lựa chọn các chỉ tiêu đánh giá độ êm dịu: Theo kết quả nghiên cứu của các đề tài khoa học thì có rất nhiều chỉ tiêu để đánh giá độ êm dịu chuyển động như tần số, gia tốc và vận tốc dao động.Trong khuôn khổ đồ án này em chỉ lựa chọn một chỉ tiêu đó là tần số dao động góc. Chỉ tiêu này được lựa chọn như sau:
Tần số dao động góc : w = 6,2 ¸ 9,4 (rad/s)
Chọn w = 8,0 (rad/s)
II.1 - xác định độ cứng của hệ thống treo trước Mc.Pherson :
Xác định độ cứng của hệ thống treo thông qua tần số dao động riêng của cơ hệ. Công thức xác định độ cứng:
(N/m) (1)
Trong đó :
+ w : Tần số dao động riêng của hệ treo. (rad/s)
+ Ct : Độ cứng của hệ thống treo trước đối với một bánh xe (N/m)
+ G : Khối lượng của phần được treo của ôtô đặt lên cầu trước (kg)
Độ cứng của hệ thống treo lấy từ giá trị trung bình cộng của 2 giá trị. Đó là độ cứng của hệ treo ở trạng thái không tải và ở trạng thái đầy tải.
ở trạng thái không tải: (2)
ở trạng thái đầy tải : (3)
( Chỉ số “0” , ”1” ký hiệu ở trạng thái không tải và trạng thái đầy tải).
Trong đó :
G01 = G001 -G0KT1- 2.mbx (kg)
G01 = G001 -G0KT1- 2.mbx (kg)
+ GKT1 :khối lượng phần không được treo. Với cầu trước chủ động, ta lấy GKT1 = 95 kg
+ mbx : Khối lượng một bánh xe, mbx =19 kg.
Vậy khối lượng phần được treo ở trạng thái không tải và đầy tải là:
G01 = 689 – 95 – 2.19 = 556 (kg)
G11 = 1032 – 95 – 2.19 = 899 (kg)
Thay các giá trị vào công thức trên. Ta được :
Vậy độ cứng của một bên hệ thống treo lấy từ giá trị trung bình cộng của độ cứng ở 2 trạng thái trên là:
II.2 - Xác định độ võng tĩnh và độ võng động của hệ treo .
II.2.1 - Độ võng tĩnh
Trong đó: + ft1 : Độ võng tĩnh của bánh xe. (mm)
+ G1: Tải trọng tĩnh tác dụng lên hệ treo. (N)
+ g : Gia tốc trọng trường, g = 10 (m/s2)
+ w : Tần số góc dao động riêng của hệ treo, w = 8,0 (Rad/s)
+ Ct : Độ cứng của hệ treo.
Vậy
II.2.2 - Xác định độ võng động của hệ treo.
fd1 = (0,7 ¸ 1,0) ft1
Chọn fd1 = 0,8. ft1 = 0,8. 0,153 = 122 (mm)
II.2.3 - Tổng hành trình bánh xe (tính từ vị trí bánh xe bắt đầu chịu tải đến vị trí max ).
fs1 = fd1 + ft1 = 122 + 153 = 275 (mm)
II.3 - Kiểm tra hành trình động của bánh xe theo điều đảm bảo khoảng sáng gầm xe tối thiểu.
fd1 £ H01 - Hmin
Trong đó:
+ fd1 : Hành trình động của bánh xe, fd1 = 122 mm.
+ Ho1 : Khoảng sáng gầm xe ở trạng thái chịu tải trọng tĩnh.
+ Hmin: Khoảng sáng gầm xe tối thiểu cần thiết.
Hmin = (0,1-: 0,15) m . Lấy Hmin = 100 mm
Chọn H01 = Hmin + fs1 = 100 + 275 = 375 mm.
Vậy điều kiện fd1 £ H01 - Hmin được đảm bảo.
II.4 - Kiểm tra hành trình động để không xảy ra va đập cứng vào ụ tì khi phanh.
- Đối với cầu trước cần kiểm tra hành trình động để không xảy ra va đập cứng vào ụ trước khi phanh.
Trong đó:
+ j max : Hệ số bám lớn nhất, j max = 0,7 ¸ 0.8 chọn j max = 0,8
+ ft1 : Độ võng tĩnh của hệ treo, ft1 = 153 mm
+ hg : Chiều cao trọng tâm xe , hg = 491 (mm)
+ b : Khoảng cách từ trọng tâm đến cầu sau : b = 1598 (mm).
Thay các giá trị vào công thức ta được:
Vậy fd1 = 122 > 37,6 (mm) . Do đó điều kiện trên được thoả mãn.
II.5 - Xác định độ võng của hệ thống treo ở trạng thái không tải.
Trong đó :
+ G’01 : Trọng lượng đặt lên 1 bánh xe khi không tải.
+ G’t1 : Trọng lượng đặt lên 1 bánh xe khi đầy tải.
+ ft1 : Độ võng của hệ treo, ft1 = 153 (mm)
Ta thấy rằng:
Vậy f0t1 = 0,688.153 = 102 (mm).
II.6 - Xác định hệ số cản của giảm chấn.
II.6.1 - Hệ số dập tắt dao động của hệ thống treo :
D = 2.y. w
Với y là hệ số cản tương đối. y=0.15 ¸ 0,3 , chọn y = 0,2.
Vậy D = 2.y. w = 2.0,2.8 =3,2 (rad/s).
II.6.2 - Hệ số cản trung bình của giảm chấn quy dẫn về bánh xe
Trong đó
+ G*1: Trọng lượng phần được treo đặt trên một bánh xe khi đầy tải.
G*1 =g.G11/2 = 10.899/2 = 4410 (N).
Vậy Ktb = 4410.3,2/10 = 1438 (N.s/m)
KÍCH THƯỚC CÁC THÔNG SỐ CƠ SỞ TÍNH TOÁN HỆ
TREO TRƯỚC
- Chiều rộng cơ sở của xe ở cầu trước B1= 1475 (mm)
- Ký hiệu lốp 185/60R14
- Bán kính bánh xe rbx = 286 (mm)
- Góc nghiêng ngang bánh xe g0= 00
- Góc nghiêng ngang trụ xoay đứng d 0 = 100
- Bán kính bánh xe quay quanh trụ xoay đứng R0= -15 (mm)
- Khoảng sáng gầm xe Hmin= 100 (mm)
- Độ võng khi không tải f0T1= 102 (mm)
- Độ võng tĩnh ft1 = 153 (mm)
- Độ võng động fd1 = 122 (mm)
- Chiều dài của trụ xoay đứng Kr =150 (mm)
- Chiểu cao tai xe lớn nhất H max = 800 (mm)
III. ĐỘNG HỌC TREO MC.PHERSON
* Xác định độ dài đòn ngang và vị trí các khớp bằng phương pháp đồ thị:
Các bước xác định như sau:
- Chọn tỷ lệ 1 / 5
- Kẻ đường nằm ngang biểu diễn mặt phẳng đường : dd
- Vẽ đường trục đối xứng ngang của xe A0m ; A0m vuông góc với dd
- Trên A0m đặt A0A1 = Hmin = 100 (mm)
A1A2 = fd1 = 122 (mm)
A2A3 = ft1 =153 (mm)
A3A4 = f0T1 = 102 (mm)
- Trên dd (mặt phẳng đường ) đặt
A0B0 = 0,5.B1 = 0,5.1475 =737,5 (mm)
( B0 là điểm tiếp xúc của bánh xe với mặt đường ở trạng thái không tải. B1 là chiều rộng cơ sở của xe ở cầu trước )
- Tại B0 dựng B0Z vuông góc với dd (vì g0 = 00 nên đường B0Z là mặt phẳng bánh xe).
- Trên B0d lấy sang phía bên trái ( phía ngoài bánh xe ) một đoạn
B0C0 = | R0| =15 (mm)
- Tại C0 dựng C0n : Đường nghiêng ngang của đường tâm trụ xoay đứng với d0 = 100 so với phương thẳng đứng.
- Trên C0n Tìm điểm O2 là điểm liên kết của giảm chấn với tai xe, O2 cách mặt đường một đoạn 800 (mm) (các xe hiện nay có khoảng cách từ 600 ¸ 100 (mm).
- Trên B0Z đặt B0B1 = rbx = 286 (mm) ( Với rbx là bán kính bánh xe).
- Tại B1 dựng đường vuông góc với B0Z, đường này cắt C0n tại C2 . C2 là điểm nối cứng của trục bánh xe với vỏ giảm chấn đồng thời là trụ xoay đướng.
- Trên C0n, từ C2 đặt xuống phía dưới một đoạn
C2C1 = 0,5.Kr =0,5. 150 = 75 (mm)
( Kr là chiều dài trụ xoay đứng).
Vậy C1C2 : Là khoảng cách từ tâm trục bánh xe tới khớp quay ngoài của đòn ngang. C1 là vị trí khớp quay ngoài của đòn ngang ở vị trí không tải. ở trạng thái không tải vị trí tâm quay trong O1 của đòn ngang phải cao hơn hoặc ngang bằng vị trí A4 trên đường A0m.
Bằng cách dựng tự ta sẽ dựng được trí khớp quay ngoài của đòn ngang ở trạng thái đầy tải như sau :
- Khi hệ thống treo biến dạng lớn nhất, nếu coi thùng xe là đứng yên thì điểm B0 của bánh xe sẽ di chuyển tịnh tiến lên phía trên về phía điểm B1.
(nếu coi khoảng cách giữa hai vết lốp bánh xe ở trạng thái này là thay đổi không đáng kể so với trạng thái xe không tải). Khi đó :
B0B2 = A1A4 = fd1 + ft1 – f0T1 = 122 +153 – 102 = 173 (mm)
- Từ B2 kẻ B2q song song với dd
- Trên B2q đặt B2D1 = B0C0 = |R0| = 15(mm)
- Nối D1 với O2 thì D1O2 là đường tâm trục xoay đứng ở vị trí hệ treo biến dạng lớn nhất.
Trong quá trình chuyển vị bánh xe, khoảng cách C0C1 không thay đổi.
Do đó
- Trên D1O2 ta đặt D1D2 = C0C1
D2 là vị trí khớp cầu ngoài của đòn ngang ứng với trạng thái hệ thống treo biến dạng lớn nhất. Như vậy C1, D2 sẽ cùng nằm trên cùng một cung tròn có tâm là khớp trong O1 của đòn ngang, bán kính là chiều dài của đòn ngang Ld (chưa biết). Do đó O1 sẽ nằm trên đường trung trực của C1D.2.
- Xác định vị trí của O1 bằng cách tìm điểm gặp của đường trung trực của C1D2 với đường thẳng song song với mặt đường dd đi qua A4 ứng với vị trí hệ treo biến dạng lớn nhất. O1 là khớp quay trong của đòn ngang.
- Nếu kéo dài C1O1 và kẻ đường vuông góc O2C1 và kéo dài thì chúng sẽ gặp nhau tại P. P là tâm quay tức thời của bánh xe trong mặt phẳng ngang.
- Nối P với B0, đường PB0 cắt A0m tại S, S là tâm quay tức thời của cầu xe và cũng là tâm quay tức thời của thùng xe trong mặt phẳng ngang.
- Đến đây ta sẽ tìm được độ dài của đòn ngang và vị trí các khớp quay của hệ thống treo đó là các vị trí O1, O2, C1. Độ dài đòn ngang thực tế sẽ bằng độ dài C1O1 nhân với tỷ lệ xích m = 0,2.
Sau khi tính toán và đo đạc ta có được chiều dài của đòn ngang là:
Ld = C1O1 =380 mm
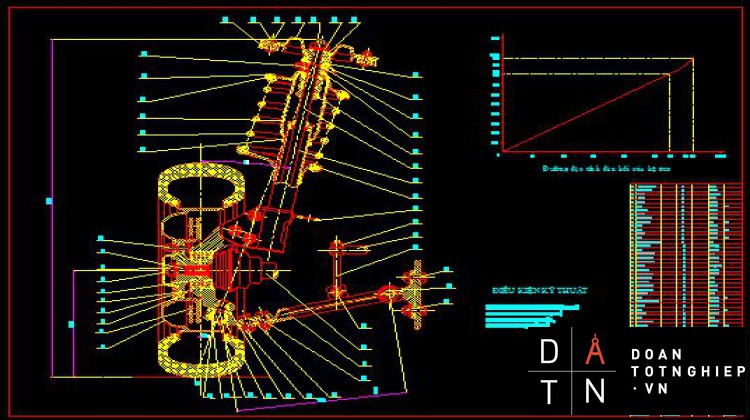
ĐỒ THỊ XÁC ĐỊNH ĐỘ ĐÀI ĐÒN NGANG
Hình – II.1
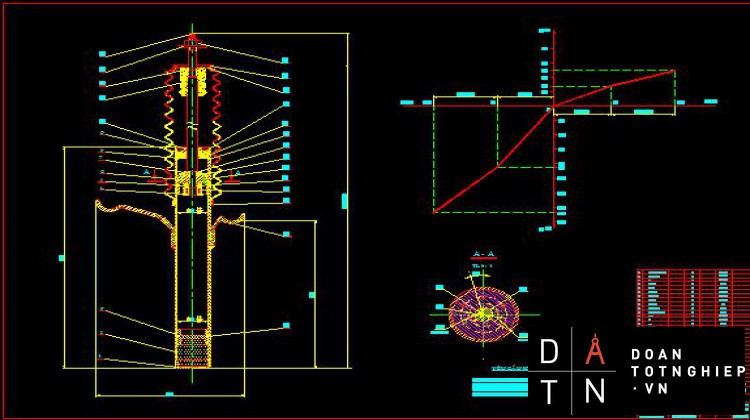
ĐỘNG HỌC HỆ TREO MC. PHERSON
Hình – II.2
Để xác định sự sai lệch Dd (góc nghiêng ngang trụ xoay dẫn hướng) và sự thay đổi chiều rộng vết bánh xe (DB) ta xây dựng sơ đồ động học bằng phương pháp đồ thị khi hệ treo biến dạng từ vị trí fot tới vị trí ft1 + fd1 . Sau đó xác định trên sơ đồ sự thay đổi các đại lượng Dd và DB so vị trí fot.
ĐỒ THỊ ĐỘNG HỌC HỆ TREO MC.PHERSON
Hình - II.3
Để đánh giá kết quả : sau đây ta sẽ so sánh với đặc tính của hệ treo của xe BMW – 320
ĐỒ THỊ ĐỘNG HỌC CỦA HỆ TREO XE BMW –320
Hình – II.4
Nhận xét : So sánh kết quả giữa hai đồ thị động học treo Mc.Pherson thiết kế và treo BMW – 320 (B = 13380 mm). Ta thấy giá trị DB và Dd của xe thiết kế gần giống với các giá trị DB và Dd của xe BMW, sai khác này nhỏ không đáng kể, chúng ta có thể chấp nhận được. Vậy chiều dài đòn ngang bằng cách xác định trên đảm bảo yêu cầu.
IV. ĐỘNG LỰC HỌC HỆ TREO MC.PHERSON
IV.1. Chế độ tải trọng :
IV.1.1. Trường hợp chịu tải trọng động theo mặt phẳng thẳng đứng:
Trên sơ đồ phân tích lực chỉ tồn tại lực Z, (vắng lực dọc X và lực ngang Y)
Ta có :
(8) Hình – II.5
Trong đó:
- Z1 : Tải trọng động tác dụng lên một bên bánh xe trước khi đầy tải.
- G11 : Tải trọng tĩnh tác dụng lên cầu trước khi đầy tải.
(Chính là trọng lượng phần được treo của cầu trước ở trạng thái đầy tải)
G11= 899 (kg) = 8990 (N)
- kd : Hệ số tải trọng động.
Kd = 1,8 ÷ 2,5 Đối với xe du lịch chạy trên đường tốt.
Kd = 2 ÷ 3 Đối với xe du lịch chạy trên đường xấu (có khả năng cơ động cao)
Trong phần động học ta đã tính toán đươc :
ft1 = 0,153 (m) = 153 (mm)
fd1 = 0,122 (m) = 122 (mm)
Hệ số tải trọng động được tính theo công thức sau:
Vậy Z1 = 1/2.8990.1,8 = 8079 (N)
IV.1.2. Trường hợp có lực kéo hoặc lực phanh cực đại :
Trên sơ đồ phân tích lực chỉ tồn tại lực Z, X (vắng lực Y) nhưng tính với giá trị cực đại.
- Tính lực Z :
Tính trong trường hợp chịu lực phanh cực đại. Vì khi phanh, trọng lượng xe dồn thêm lên hệ thống treo cầu trước nên tacó.
(9)
Trong đó:
- Zp1: Tải trọng động tác dụng lên hệ treo một bánh xe trước khi đầy tải, trong trường hợp phanh gấp Phản lực thẳng đứng tác dụng lên một bánh xe ở cầu trước khi đầy tải.
- GT1 : Trọng lượng phân ra cầu trước khi xe đầy tải; GT1 = 10320 N
- GKT : trọng lượng phần không được treo của cầu trước; GKT1=1330 N
- mP1 : Hệ số phân bố tải trọng của cầu trước khi phanh gấp .
+Tính mP1 :
Hình – II.6
Ta có:
(10)
Trong đó :
+ hg : Chiều cao trọng tâm xe; hg = 491 (mm) = 0,491 (m)
+ L : Chiều dài cơ sở của xe L = 2620 (mm) = 2,62 (m)
+ g : Gia tốc trọng trường g » 10 (m/s2)
+ b : Khoảng cách từ trọng tâm đến cầu sau;
b = 1598 mm = 1,598 m
+ Jpmax : Gia tốc phanh cực đại (m/s2) Jpmax = j . g
Với j = 0,7 ¸ 0,8 là hệ số bám dọc của bánh xe trên đừng tốt.
Chọn j = 0,8
Vậy Jpmax = 0,8 . 10 = 8 m/s2
Từ công thức (10) ta được
Thay các giá trị trên vào công thức (9) Ta được:
b. Tính lực X1:
Lực dọc lớn nhất khi phanh tác dụng vào bánh xe cầu trước được tính như sau::
X1 = Zp1 . j = 5785 . 0,8 = 4628 (N)
IV.1.3. Trường hợp chịu lực ngang cực đại :
Trên sơ đồ có lực Z và Y (vắng lực X)
- Tính lực Z:
Phản lực thẳng đứng tại điểm tiếp xúc của bánh xe với mặt đường khi chịu lực ngang cực đại đối với một bámh xe cầu trước được tính như sau:
(N)
Trong đó :
+ Zn1: Tải trọng động tác dụng lên một bên hệ treo cầu trước trong trường hợp xe chịu lực ngang cực đại.
+ GT1: Khối lượng của xe phân ra cầu trước khi đầy tải; GT1 = 1032 kg
+ GKT1: Khối lượng phần không được treo ở cầu trước; GKT1 = 133 kg
+ B1 : Chiều rộng vết bánh xe trước B1 = 1475 (mm) = 1,475 (m)
+ hg : Chiều cao trọng tâm ôtô. hg = 491 (mm) = 0,491 (m)
+ jy : Hệ số bám ngang : Lấy jy = 1
Thay các giá trị trên vào công thức (11) Ta được:
- Tính lực Y
Lực bên tác dụng lên một bánh xe được tính theo công thức :
(12)
Thay các giá trị trên vào công thức (12) Ta được:
(N)
IV.2. Xác định các lực và phản lực tác dụng lên cơ cấu :
IV.2.1. Trường hợp chỉ chịu lực Z
Trường hợp này ta xét đến khi xe chạy trên đường thẳng, không bằng phẳng, phản lực Z1 đặt tại bánh xe gây nên đối với trụ đứng AB một lực
Và mô men MZ : (MZ trong mặt phẳng YOZ)
Hình – II.7
+ ZAB Cân bằng với ZLx (lực tác dụng lên lò xo)
ZLX = ZAB = Z1.cosd = 8079. cos100 = 7956 (N)
d = 100: Là góc nghiêng ngamg của trụ đứng, trong trường hợp này d cũng là góc nghiêng ngang của giảm chấn.
+ Tại đầu A : Lực tác dụng dọc theo giảm chấn: ZA
ZA = ZAB = ZLx = 7956 (N)
+ Tính lực ZY : Thành phần lực Z theo phương y
ZY = Z1 . tgd = 8079 . tg100 = 1424 (N)
+ ZY : Tạo nên cho hai phản lực :
Đặt tại A là : AZY
Đặt tại B là: BZY
Viết phương trình cân bằng mômen tại A và B đối với ZY và 2 phản lực dop ZY gây nên là AZY và BZY như sau:
åMZY (A) = 0 Û ZY (Rbx + m) – BZY(m +n) = 0
åMZY (B) = 0 Û ZY (Rbx - n) – AZY(m +n) = 0
Vậy (13)
(14)
Trong đó: + d: Góc nghiêng ngang của trụ đứng, d = 100
+ m = 510 mm = 0,51 m
+ n = 75 mm = 0,075 m
( m,n : Được xác định ở phần bản vẽ động học)
Thay các giá trị vào công thức (13),(14) Ta được:
- Mô men MZ gây nên phản lực trên AB
Tại đầu A là : AMZ
Tại đầu B là : BMZ
AMZ = BMZ =
Vậy tổng lực tác dụng lên trục đứng AB
- Tại đầu A
+ ZA = AZY + AMZ = 514 + 204 = 718 (N)
- Tại đầu B
+ ZB = BZY + BMZ = 1937 + 204 = 2141 (N)
Vì đòn ngang dưới bắt với trụ đứng tại B bằng khớp cầu cho nên trên đòn ngang tại C có lực liên kết :
CY = BZY + BMZ = 2141 (N)
+ CY gây các phản lực tại các gối tựa D và E
(Trong đó d1 =0,11 (m) ; d2 = 0,17 (m) chọn trước và được xác định trên bản vẽ mặt cắt ngang treo trước)
IV.2.2. Trường hợp chịu lực Z và X.
Trường hợp này được tính đến khi xe chạy trên đường thẳng có lực kéo hoặc lực phanh cực đại. Nhưng thường thì lực phanh lớn hơn lực kéo nên ta tính theo chế độ lực phanh cực đại.
Hình – II.8
Như trên ta đã tìm được :
Zp1 = 5785 (N)
X1 = 462 (N)
Phân tích tác dụng của lực Zp1 (phản lực thẳng đứng đặt tại điểm tiếp xúc của bánh xe với mặt đường) và các phản lực tương tự như ở mục IV.2.1 ta có kết quả sau :
+ ZLX = Zp1.cosd = 5785 . cos100 = 5697 (N)
+ ZA = ZAB = ZLx = 5697 (N)
+ ZY = Z p1.tg d = 5785. Tg 100 = 1020 (N)
+ = 368 (N)
+ = 1388 (N)
+ AMZ = BMZ =
+ CY = BZY + BMZ = 1388 + 146 = 1534 (N)
+
+
* Phân tích tác dụng của lực dọc X1 .
Tính trường hợp khi phanh lực dọc X1 đặt tại điểm tiếp xúc của bánh xe với mặt đường.
Lực dọc X1 chuyển về tâm trục bánh xe sẽ phân tích thành:
(+) Lực X0 = X1
(+) Mômen : MX =X1 . Rbx
+ X0 : Gây nên trên trục đứng các phản lực
` - Tại đầu A : AX
- Taị đầu B : BX
Viết phương trình cân bằng mô men đối với điểm A và B dưới tác dụng của lực X0 :
Û BX.(m + n) - X0 . m = 0 (15)
Û AX.(m + n) - X0 . n = 0 (16)
Từ (15),(16) ta có:
+ MX : là mô men của X0 đối với điểm 0 trong mặt phẳng XOZ
MX = X0.Rbx = 4628.0,286 = 1324 (N)
MX gây nên ác phản lực trên trụ đứng ở đầu A và đầu B là AMX và BMX.
Ta có:
- Lực X gây ra trên đòn ngang lái đặt tại S một lực.
(17)
Trong đó : Ls là chiều dài đòn kéo dọc của HTL
Theo kinh nghiệm người ta thường lấy Ls = 0,15 ¸ 0,18 m;
Chọn Ls = 0,15 m
Thay các giá trị trên vào công thức (17) Ta được:
As và Bs là các lực do SY gây ra tại điểm A và B của trụ đứng. Viết phương trình cân bằng mômen đối với điiểm A và B dưới tác dụng của SY Ta có:
Û BS.(s + t) - SY .s = 0 (18)
Û AS.(s + t) – SY .t = 0 (19)
Trong đó:
- s : Là khoảng cách từ đòn ngang lái đến đầu trên của trụ đứng.
- t : Là khoảng cách từ đòn ngang lái đến đầu dưới của trụ đứng.
Chọn s = m = 0,51 (m)
t = n = 0,075 (m)
Từ (18),(19) Ta có:
* Tổng lực tác dụng lên trục đứng :
+ Tại đầu A :
- Theo phương x : ASX = AMX – AX = 2263 – 593 = 1670 (N)
- Theo phương y : ASY = AMZ + AZY – AS = 146 + 368 – 59 =455(N)
+ Tại đầu B
- Theo phương x : BSX = BMX + BX = 2263 + 4035 = 6298 (N)
- Theo phương y : BSY = BZY + BMZ + BS = 1388 + 146 + 397
= 1931(N)
* Các lực tác dụng lên đòn ngang dưới :
+ Tại C có các lực liên kết :
CX = BSX = 6298 (N)
CY = BSY = 1931 (N)
- Lực CY gây nên các phản lực ở D và E (các khớp trụ) như sau :
+ Viết phương trình cân bằng mômen tại D và E dưới tác dụng tác dụng của lực CY.
S MD (CY) = 0 Û EY.(d1 + d2) – CY . d1 = 0 (20)
S ME (CY) = 0 Û DY.(d1 + d2) – CY . d2 = 0 (21)
Từ (20),(21) ta có:
- Lực CX gây nên các phản lực tại D và E như sau:
+ Theo phương X: DX = EX = 0,5. CX = 0,5. 6289 = 3144,5 (N)
+ Theo phương Y:
Trong đó:
+ Ld : Chiều dài đòn ngang dưới Ld = 0,38 (m)
+ d1= 0,11 (m)
+ d2 = 0,17 (m)
* Như vậy tổng lực tác dụng lên đòn ngang dưới sẽ là :
+ Tại đầu C :
- theo phương x : CX = 6289 (N)
- Theo phương y : CY = 1931 (N)
+ Tại khớp D :
- Theo phương x : DX = 3144,5 (N)
- Theo phương y : DCX – DY = 8535 – 1172 = 7363 (N)
+ Tại khớp E :
- Theo phương x : EX = 3144,5 (N)
- Theo phương y : ECX – EY = 8535 – 759 = 7776 (N)
.................................................
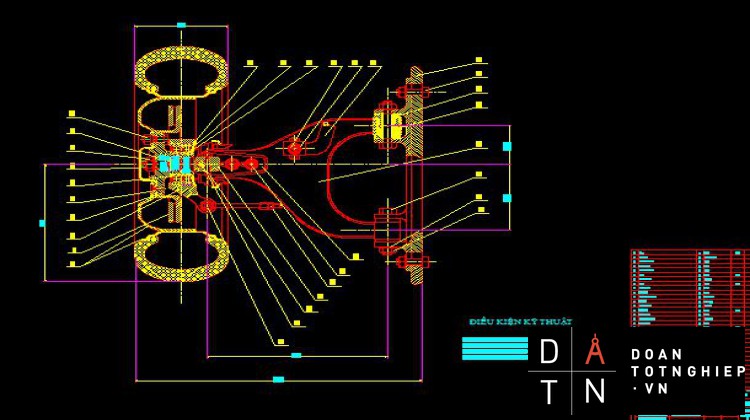
Hình I.12 - Sơ đồ cấu tạo hệ treo 2 đòn dọc có thanh ngang liên kết
|
1. Bánh xe |
4. Thùng xe |
|
2. Khớp trụ |
5. Lò xo |
|
3. Đòn dọc |
6. Giảm chấn |
|
7. Thanh liên kết |
|
Đây là hệ treo dạng nửa phụ thuộc nửa độc lập. Nó được dùng chủ yếu cho cần bị động. Đặc tính phụ thuộc hay độc lập tuỳ thuộc vào độ cứng hay vi trí của đòn liên kết.
Đặc tính độc lập thể hiện ở kết cấu là 2 đòn dọc đặt ở hai bên xe giống như hệ treo đòn dọc. Còn đặc tính phụ thuộc thể hiện bằng sự liên kết hai đòn dọc băng một thanh liên kết. Độ cứng của thanh liên kết nhỏ hơn nhiều lần so với dầm cầu phụ thuộc.
Hệ treo đòn dọc có thanh ngang liên kết hiện nay được dùng rộng rãi trên một số xe du lịch có vận tốc lớn, vì nó có những ưu điểm sau:
- Kết cấu của hệ treo khá gọn, khối lượng nhỏ, có thể sản xuất hàng loạt và khả năng lắp ráp nhanh, chính xác. Điều này có lợi cho việc giảm giá thành, đặc biệt là với hệ treo có bộ phận đạn hồi là thanh xoắn.
- Do có thanh ngang liên kết nên có thể san bớt lực tác dụng ngang cho cả hai khớp trụ hai bên, do đó mỗi bên khớp trụ sẽ chịu một lực nhỏ hơn, các khớp trụ sẽ bền hơn.
- Tuỳ theo vị trí đặt đòn ngang mà người ta có thể không cần dùng đến thanh ổn định của hệ treo độc lập. Nhiệm vụ của thanh ổn định là do đòn ngang đảm nhận.
Cũng giống như các hệ treo độc lập khác, hệ treo đòn dọc có thanh ngang liên kết bộ phận đàn hồi của nó có thể là lò xo trụ xoắn. Lò xo được đặt ở giữa khung và đòn dọc. Để tiết kiệm không gian, lò xo thường được lồng vào giảm chấn. Trong trường hợp dùng các thanh xoắn thì chúng được bố trí như đối với các hệ treo độc lập khác, nhưng mỗi đòn dọc có một thanh xoắn riêng, chúng cho phép điều chỉnh được độ cao thùng xe.
III.2.5 - Hệ treo đòn chéo
Hình I.13 - Sơ đồ cấu tạo của hệ treo đòn chéo .
1. Dầm cầu 2. Đòn chéo 3. Các đăng
Ngoài các hệ treo độc lập đã xét trên, hiện nay một số xe du lịch còn sử dụng hệ treo đòn chéo. Hệ treo này mang đặc tính trung gian giữa hệ treo đòn ngang và hệ treo đòn dọc. Bởi vậy, sử dụng hệ treo này cho ta tận dụng được ưu điểm của hai hệ treo trên và khắc phục được một số nhược điểm của chúng.
Trong hệ treo đòn chéo, chi tiết đàn hồi phần lớn là lò xo xoắn ốc, chúng có thể là dạng trụ hoặc xếp. Loại lò xo xếp có ưu điểm là gọn, hành trình làm việc lớn. Loại lò xo hình trụ thường được lồng vào giảm chấn như đối với hệ treo đòn dọc để chúng chiếm ít không gian. Ngoài ra, đối với hệ treo này người ta còn dùng thanh ổn định để làm tăng sự dịu êm trong quá trình chuyển động.
So với các hệ treo kể trên thì hệ cheo đòn chéo có ưu điểm hơn ở chỗ: khi bánh xe dao động theo phương thẳng đứng thì cũng kéo theo sự thay đổi khoảng cách giữa hai vết bánh xe, góc nghiêng ngang nhưng sự thay đổi nhỏ hơn các loại trên. Riêng độ chụm trước của bánh xe thì thay đổi không đáng kể.
IV. XU HƯỚNG PHÁT TRIỂN CỦA CÁC HỆ THỐNG TREO.
Hiện nay, trên các loại ôtô trong nước và thế giới đang sử dụng rất nhiều hệ thống treo với đủ mẫu mã chủng loại. Nhưng đối với ôtô con hiện đại ngày nay người ta thường sử dụng hai hệ thống treo độc lập như:
- Treo hai đòn ngang
- Treo Mc pherson
- Treo đòn dọc
- Treo đòn dọc có thanh ngang liên kết
- Một số ít các ôtô khác có sử dụng hệ thống treo đòn chéo hoặc treo nhiều khâu.
Kết hợp với việc sử dụng hệ thống treo độc lập là sử dụng loại lốp có bề rộng lớn và áp suất thấp. Điều này có lợi cho sự biến dạng lốp, và cũng tăng độ dịu êm chuyển động của ôtô. Tăng khả năng bám đường của lốp cộng với sự hạ thấp trọng tâm của xe sẽ làm cho ôtô có thể chuyển động ở tốc độ cao mà vẫn đảm bảo sự ổn định của ôtô, kể cả lúc quay vòng.
Các hệ thống treo của ôtô con thông dụng hiện nay thường dùng loại có cấu tạo đơn giản, giảm số chi tiết, giảm trọng lượng hệ thống treo, giá thành hạ, dễ tháo lắp và sửa chữa bảo dưỡng.
Dựa vào các tiêu chí trên, trong đồ án này chúng em đã chọn và thiết kế hệ thống treo của ôtô du lịch (năm chỗ ngồi) với treo trước là hệ treo Mc pherson cho cần trước chủ động do Lê Hoàng Dung thiết kế và treo sau là hệ thống treo đòn dọc có thanh ngang liên kết cho cầu sau bị động do Phạm Đức Hà thiết kế
CÁC THÔNG SỐ CỦA XE THIẾT KẾ
- Khối lượng không tải Go = 1130 kg
+ Cầu trớc G01 = 61% Go = 689 kg
+ Cầu sau G02 = 39% G0 = 441 kg
- Khối lượng toàn tải GT = 1750 kg
+ Cầu trớc GT1 = 59%GT = 1032 kg
+ Cầu sau GT2 = 41%Gt = 718 kg
- Kích thước cơ bản L0 x B0 x H0 = 4305 x 1695 x 1390
- Chiều dài cơ sở L = 2620 mm
- Khoảng cách từ trọng tâm đến cầu trớc
- Khoảng cách từ trọng tâm đến cầu sau
- Chiều cao trọng tâm hg= 491 mm
- Chiều rộng cơ sở của cầu trứơc B1 = 1475 mm
- Chiều rộng cơ sở của cầu sau B2 = 1470 mm
- Cỡ lốp 185/60R14H
- Vận tốc lớn nhất Vmax = 192 km/h
- Công suất cực đại của động cơ Nemax= 126 (mã lực) /6500 v/p
= 93 kw /6500v/p
- Mômen xoắn cực đại của động cơ Memax= 144 Nm /5200 v/p
- Kiểu động cơ 4 xilanh thẳng hàng
- Bố trí động cơ Trước – ngang
- Kiểu truyền lực Cầu trước chủ động
- Số chỗ ngồi 5
- Số cữa 4
- Kiểu xe Sedan
.........................................
PHẦN IV
CÔNG NGHỆ GIA CÔNG CHI TIẾT
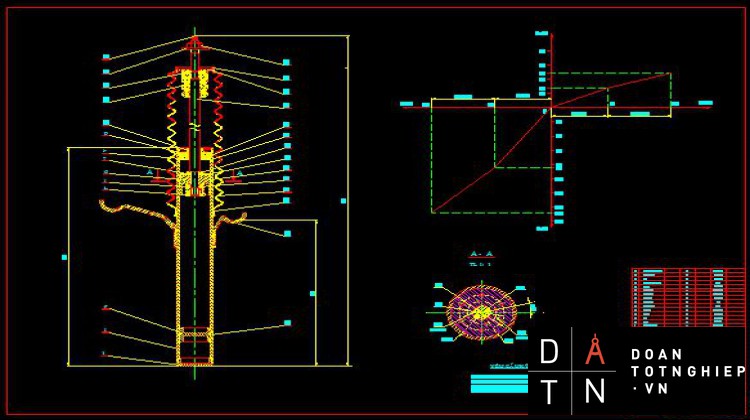
Trong phần này, em thiết lập quá trình công nghệ gia công chi tiết Pistong giảm chấn sử dụng trong hệ treo sau (đã tính trong phần tính toán giảm chấn).
* Bản vẽ chế tạo Pistong giảm chấn :
1.Chức năng và yêu cầu kỹ thuật của Pistong giảm chấn :
*) Chức năng :
Trong quá trình làm việc của giảm chấn, Pistong giảm chấn chuyển động trượt tương đối với xy lanh giảm chấn. Nó chia xy lanh làm hai khoang trên và dưới, hai khoang này thông nhau nhờ các van tiết lưu một chiều trên Pistong, các van tiết lưu này có nhiệm vụ dẫn dầu lưu thông từ khoang trên xuống khoang dưới của xy lanh (hoặc ngược lại) . Trong quá trình Pistong làm việc, tại lỗ chất lỏng ma sát với lỗ , biến động năng thành nhiệt năng toả ra ngoài . Do vậy Pistong cần có các yêu cầu sau :
*) Yêu cầu kỹ thuật :
+ Tâm lỗ F14 lắp đòn đẩy pistong phải đồng tâm với mặt trụ ngoài B (F50) , độ không đồng tâm phải đảm bảo £ 0,02 (mm).
+ Đảm bảo độ không không vuông góc mặt đầu A, mặt C và mặt E so với đường tâm chung £ 0,01 (mm) (đường trục của pistong).
+ Độ ô van của F50 cho phép £ 0,01 (mm).
+ Độ côn mặt trụ ngoài B cho phép £ 0,01 (mm).
+ Đảm bảo độ bóng bề mặt tiếp xúc xy lanh giảm chấn , mặt đầu A đạt Ra = 0,63.
2.Chọn phôi :
Từ chức năng làm việc của pistong và tham khảo tài liệu, em chọn vật liệu chế tạo pistong là hợp kim nhôm AK4, phương pháp chế tạo phôi là đúc.
*Bản vẽ lồng phôi :
( Trang sau )
3. Xác định quy trình công nghệ :
Việc gia công chi tiết pistong giảm chấn được thực hiện từ phôi ban đầu qua trình tự các nguyên công như sau :
+ Nguyên công 1 : Tiện thô mặt đầu A, tiện thô mặt trụ ngoài B, khoan lỗ F14, tiện tinh mặt đầu A, tiện tinh mặt trụ ngoài B , vát mép, xén rãnh xéc măng.
+ Nguyên công 2 : Đảo đầu, tiện thô mặt B , tiện thô mặt C, tiện thô mặt trụ trong D, tiện thô mặt E, tiện tinh mặt B , tiện tinh mặt C, tiện tinh mặt E, vát mép.
+ Nguyên công 3 : Chuyển sang máy khoan, khoan 4 lỗ F2,2 và 6 lỗ F3,3.
+ Nguyên công 4 : Chuyển sang máy mài, mài mặt trụ ngoài B, mài mặt đầu A.
+ Nguyên công 5 : Tổng kiểm tra.
Các loại máy và dao dùng để gia công chi tiết được tham khảo trong Sổ tay công nghệ chế tạo máy.
II. Trình tự của mỗi nguyên công :
1. Nguyên công 1 :
* Bước 1 : Tiện thô mặt đầu A.
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Độ dài phôi pistong : từ 45 ¸ 43 (mm).
+ Chiều sâu cắt : t = 2 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
* Bước 2 : Tiện thô mặt ngoài B.
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Tiện thô : từ F55 ¸F51.
+ Chiều sâu cắt : t = 2 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
* Bước 3 : Khoan lỗ F14.
- Khoan : từ F11 ¸F14.
Trên máy 1K62 và dùng dao P18 , với đặc tính kĩ thuật của máy :
+ Chiều sâu cắt : t = 1,5 (mm).
+ Lượng chạy dao : s = 0,2 (mm/v).
+ Số vòng quay của máy : n = 173 (v/p).
* Bước 4 : Tiện tinh mặt đầu A.
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Độ dài phôi pistong : từ 43 ¸ 42,55 (mm).
+ Chiều sâu cắt : t = 0,45 (mm).
+ Lượng chạy dao : s = 0,2 (mm/v).
+ Số vòng quay của máy : n = 503 (v/p).
* Bước 5 : Tiện tinh mặt ngoài B, vát mép .
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Tiện tinh : từ F51 ¸F50,1 (mm).
+ Chiều sâu cắt : t = 0,45 (mm).
+ Lượng chạy dao : s = 0,2 (mm/v).
+ Số vòng quay của máy : n = 503 (v/p).
* Bước 6 : Xén rãnh xéc măng .
Trên máy 1K62 và dùng dao P18, với đặc tính kĩ thuật của máy :
+ Chiều sâu cắt : t = 2 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
* Bước 7 : Vát mép lỗ F14.
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
+ Chiều sâu cắt : t = 1 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
( Hinh vẽ cho nguyên công 1 _ Trang sau )
2. Nguyên công 2:
Đảo ngược đầu phôi, tiến hành các bước sau :
* Bước 1 : Tiện thô mặt ngoài B .
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Tiện thô : từ F55 ¸F51 (mm).
+ Chiều sâu cắt : t = 2 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
* Bước 2 : Tiện thô mặt C.
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Độ dài phôi pistong : từ 43,55 ¸ 40,55 (mm).
+ Chiều sâu cắt : t = 2 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
* Bước 3 : Tiện thô mặt trụ trong D .
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Tiện thô : từ F40 ¸F44.
+ Chiều sâu cắt : t = 2 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
* Bước 4 : Tiện thô mặt E .
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
+ Chiều sâu cắt : t = 2 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
* Bước 5 : Tiện tinh mặt ngoài B.
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Tiện tinh : từ F51 ¸F50,1 (mm).
+ Chiều sâu cắt : t = 0,45 (mm).
+ Lượng chạy dao : s = 0,2 (mm/v).
+ Số vòng quay của máy : n = 503 (v/p).
* Bước 6 : Tiện tinh mặt C, vát mép .
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
- Tiện tinh : từ 40,55 ¸ 40,1 (mm).
+ Chiều sâu cắt : t = 0,45 (mm).
+ Lượng chạy dao : s = 0,2 (mm/v).
+ Số vòng quay của máy : n = 503 (v/p).
* Bước 7 : Tiện tinh mặt E.
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
+ Chiều sâu cắt : t = 0,45 (mm).
+ Lượng chạy dao : s = 0,2 (mm/v).
+ Số vòng quay của máy : n = 503 (v/p).
* Bước 8 : Vát mép lỗ F14.
Trên máy 1K62 và dùng dao gắn mảnh hợp kim cứng T15k6 , với đặc tính kĩ thuật của máy :
+ Chiều sâu cắt : t = 1 (mm).
+ Lượng chạy dao : s = 0,42 (mm/v).
+ Số vòng quay của máy : n = 350 (v/p).
( Hinh vẽ cho nguyên công 2 _ Trang sau )
.................................
VIII. CHỌN VÀ KIỂM BỀN CÁC BỘ PHẬN CHÍNH
VIII.1. Kiểm bền đòn ngang dưới.
Đòn ngang dưới có cấu trúc hình chữ A được bắt vào thân xe qua hai khớp trụ trong. Đầu còn lại bắt với cam quay rô tuyn (khớp cầu). Việc sử dụng hai khớp trụ trong nhằm tăng độ cứng vững cho hệ treo .
|
|
Trạng thái chịu lực chủ yếu là kéo, nén ,uốn ngang. Khi kiểm bền giả thiết rằng : Một phần càng chữ A chịu toàn bộ tải trọng. Do vậy có thể tính toán như sau:
VIII.1.1. Trường hợp chịu lực Z và Y
Trong trường có lực Z và Y đòn ngang phải chịu lực kéo lớn nhất, nên khi kiểm bền cho trường hợp này thì trường hợp đòn ngang chỉ chịu lợc Z cũng được thoã mãn.
Tiết diện của đòn ngang được xác định dựa trên xe tham khảo HON DA CIVIC 1.6 (Hình vẽ)
Đòn ngang dưới sẽ chịu kéo với :
P = CY = 9590 (N)
Đòn ngang được chế tạo được chế
tạo bằng các lá thép dập và hàn lại với nhau. Ở những nơi có ứng suất lớn cóp thể sữ dụng biện pháp gia cố tăng cường tiết diện.
Trong trường hợp này ta kiểm bền đòn ngang theo điều kiện kéo với
N/mm2
Trong đó: + sK : Là ứng suất kéo.
+ p : Là lực kéo tác dụng lên đòn ngang; p = 9590 (N)
+ S : Tiết diện của đòn ngang.
S = 30 . 50 – 42 . 22 = 576 (mm2)
Vậy (N/mm2)
Chọn vật liệu là thép dập St 37 – 2 có
n = 1,5 là hệ số an toàn
Từ kết quả trên ta có sK£ [sK]
Vậy trong trường hợp chịu tác dụng của lực ngang đòn ngang thoả mãn điều kiện bền.
VIII.1.2. Trường hợp chịu lực Z và X
Sau khi tính toán trong phần các chế độ tải trọng Ta có:
CY = 1931 (N)
CX = 6280 (N)
Ở trường hợp này vì lực gây nên ưng suất kéo p = 1931 N nhỏ hơn lợc gây nên ứng suất kéo ở trường hợp chịu lực ngang .Vì vậy, điều kiện bền kéo được đảm bảo sau khi ta đã kiểm bền kéo của đòn ngang khi chịu tác dụng lực ngang. Vì vậy, ta chỉ cần kiểm bền đòn ngang theo điều kiện bền cắt và bền uốn do lực dọc CX gây nên là đủ.
C X : Đóng vai trò là lực cắt và gây uốn ngang trong mp XOY.
* Kiểm bền đòn ngang theo điều kiện cắt
+ Ứng suất tiếp lớn nhất được xác định theo công thức.