LUẬN VĂN TỐT NGHIỆP MOBILE ROBOT BÁM ĐỐI TƯỢNG DI ĐỘNG





NỘI DUNG ĐỒ ÁN
ĐẠI HỌC QUỐC GIA THÀNH PHỐ HỒ CHÍ MINH
TRƯỜNG ĐẠI HỌC BÁCH KHOA
KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN ĐIỀU KHIỂN TỰ ĐỘNG
LUẬN VĂN TỐT NGHIỆP
MOBILE ROBOT BÁM ĐỐI TƯỢNG DI ĐỘNG

TÓM TẮT LUẬN VĂN
Nội dung của đề tài là sử dụng xử lý ảnh để nhận dạng đối tượng, kết hợp với giải thuật điều khiển khoảng cách để bám theo đối tượng.
- Nhận dạng đối tượng dựa vào màu sắc.
- Điều khiển mobile robot bám đối tượng dùng bộ lọc Kalman và bộ điều khiển mờ.
Mô hình thực tế của luận văn là một mô hình xe với hai động cơ DC (động cơ Hitachi D06D401E) dùng làm hệ thống truyền động chính và hai bánh lái Omni phía trước.
Bộ phận điều khiển chính sử dụng vi điều khiển PIC 18F4431, ngoài ra còn có board mạch lái điều khiển các động cơ DC.
Robot còn được kết hợp với một laptop làm trung tâm điều khiển và một webcam dùng làm thị giác cho Robot.
Bố cục của luận văn được trình bày từ Cơ sở lý thuyết về xử lý ảnh, phương pháp nhận dạng, thuật toán bám đối tượng, thuật toán điều khiển động cơ, tiếp đó là phần xây dựng phần cứng, phần mềm theo yêu cầu của đề tài. Cuối cùng là phần kết quả và hướng phát triển.
Kết quả thực hiện thỏa mãn khá tốt yêu cầu đặc ra: nhận dạng và bám theo được đối tượng đã chọn. Xây dựng được giao diện điều khiển từ máy tính.Tuy nhiên quá trình nhận dạng đối tượng còn gặp nhiều khó khăn do ảnh hưởng của nhiễu môi trường và các yếu tố khách quan khác.
MỤC LỤC
TRANG BÌA.................................................................................................................................... i
NHIỆM VỤ LUẬN VĂN................................................................................................................
PHIẾU CHẤM ĐIỂM......................................................................................................................
LỜI CẢM ƠN................................................................................................................................. ii
TÓM TẮT LUẬN VĂN................................................................................................................ iii
MỤC LỤC...................................................................................................................................... iv
DANH SÁCH HÌNH ẢNH..............................................................................................................
DANH SÁCH BẢNG BIỂU............................................................................................................
Chương 1: TỔNG QUAN VỀ ĐỀ TÀI....................................................................................... 1
1.1. Mở đầu.......................................................................................................................... 1
1.2. Tổng quan về robot....................................................................................................... 1
1.2.1. Giới thiệu chung về robot.................................................................................... 1
1.2.2. Lịch sử phát triển của robot................................................................................. 2
1.2.3. Các thế hệ robot................................................................................................... 4
1.2.4. Giới thiệu robot bám đối tượng........................................................................... 5
1.3. Giới thiệu sơ lược về xử lý ảnh.................................................................................... 7
1.3.1. Sơ lược về một hệ thống xử lý ảnh..................................................................... 7
1.3.2. Các khái niệm cơ bản trong xử lý ảnh............................................................... 11
1.3.3. Không gian màu................................................................................................. 15
Chương 2: VI ĐIỀU KHIỂN PIC 18F4431 VÀ CÁC PHẦN TỬ KHÁC............................ 17
2.1. Vi điều khiển PIC 18F4431........................................................................................ 17
2.1.1. Đặc điểm chung của vi điều khiển PIC 18F4431.............................................. 17
2.1.2. Sơ đồ chân......................................................................................................... 17
2.1.3. Các thanh ghi đặc biệt....................................................................................... 19
2.1.4. Chức năng của các chân.................................................................................... 20
2.1.5. Cấu trúc bộ nhớ................................................................................................. 24
2.1.6. Các port I/O....................................................................................................... 26
2.1.7. Bộ định thì trong PIC........................................................................................ 29
2.1.8. Các ngắt............................................................................................................. 31
2.1.9. Module PWM.................................................................................................... 32
2.1.10. Quadrature encoder interface(QEI)................................................................. 40
2.2. Phần tử khác............................................................................................................... 43
2.2.1. Phương pháp điều khiển động cơ DC............................................................... 43
2.2.2. Giao tiếp qua chuẩn RS232............................................................................... 45
Chương 3: LÝ THUYẾT ĐIỀU KHIỂN MỜ VÀ BỘ LỌC KALMAN............................... 47
3.1. Lý thuyết điều khiển mờ............................................................................................. 47
3.1.1. Giới thiệu về logic mờ....................................................................................... 47
3.1.2. Một số khái niệm cơ bản.................................................................................... 49
3.1.3. Các phép toán trên tập mờ................................................................................. 53
3.1.4. Logic mờ............................................................................................................ 54
3.2. Bộ lọc Kalman............................................................................................................ 61
3.2.1. Các khái niệm nền tảng của bộ lọc Kalman....................................................... 61
3.2.2. Giới thiệu tổng quan bộ lọc Kalman.................................................................. 64
3.2.3. Mô hình tổng quát và xây dựng bộ lọc Kalman................................................ 66
Chương 4: THIẾT KẾ VÀ THI CÔNG PHẦN CỨNG......................................................... 75
4.1. Sơ đồ khối................................................................................................................... 75
4.2. Sơ đồ nguyên lý.......................................................................................................... 76
4.2.1. Mạch chuyển đổi từ 12VDC(pin) sang 5VDC.................................................. 76
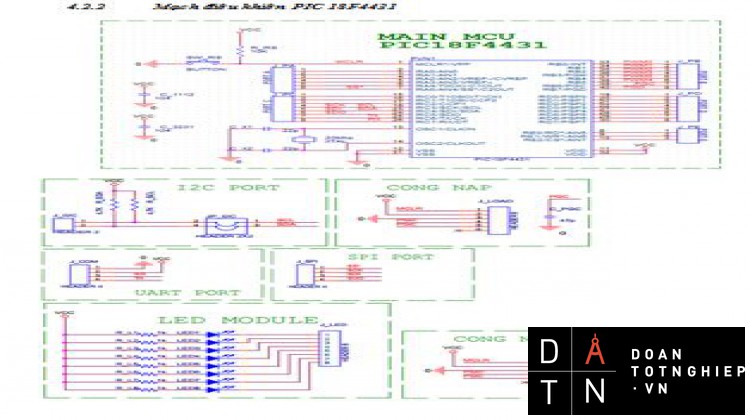
4.2.2. Mạch điều khiển PIC 18F4431.......................................................................... 77
4.2.3. Mạch giao tiếp RS232....................................................................................... 79
4.2.4. Mạch công suất điều khiển động cơ MD2B...................................................... 80
4.3. Các linh kiện khác....................................................................................................... 81
4.4. Hình ảnh mô hình khi đã hoàn thành.......................................................................... 83
Chương 5: THIẾT KẾ GIẢI THUẬT VÀ CHƯƠNG TRÌNH............................................. 84
5.1. Thiết kế giải thuật....................................................................................................... 84
5.1.1. Lưu đồ giải thuật điều khiển trên máy tính........................................................ 84
5.1.2. Lưu đồ giải thuật trên vi điều khiển................................................................... 87
5.1.3. Nhận dạng đối tượng......................................................................................... 88
5.1.4. Bộ lọc Kalman................................................................................................... 88
5.1.5. Bộ điều khiển khoảng cách................................................................................ 90
5.2. Chương trình.............................................................................................................. 93
5.2.1. Các phần mềm được sử dụng............................................................................ 93
5.2.2. Giao diện điều khiển từ máy tính...................................................................... 95
Chương 6: KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN............................................................... 97
6.1. Một số hình ảnh về hoạt động của hệ thống............................................................... 97
6.2. Những vấn đề đã thực hiện được............................................................................... 99
6.3. Hạn chế của đề tài....................................................................................................... 99
6.4. Hướng phát triển của đề tài........................................................................................ 99
TÀI LIỆU THAM KHẢO.......................................................................................................... 100
PHỤ LỤC ................................................................................................................................... 101
CHƯƠNG 1
TỔNG QUAN VỀ ĐỀ TÀI
- Mở đầu
Trong thời đại công nghiệp ngày nay, robot ngày càng được sử dụng phổ biến trong sản xuất cũng như trong cuộc sống hằng ngày. Robot đã có một vị trí quan trọng khó có thể thay thế được, nó giúp con người trong các công việc nguy hiểm khó khăn. Ngoài ra còn được sử dụng trong các lĩnh vực thám hiểm không gian, quân sự, giải trí… Lĩnh vực robot ngày càng chiếm được sự quan tâm của các nhà nghiên cứu và xã hội . Trong đó, hệ thống cảm biến, nhận dạng là không thể thiếu. Ngày nay hệ thống nhận dạng càng trở nên phong phú với nhiều sự nhận dạng khác nhau cũng như sự tích hợp càng nhiều những công nghệ kỹ thuật cao. Xử lý ảnh là một trong những hệ thống nhận dạng giúp robot nhận thức thế giới chung quanh một cách đầy đủ nhất.
Xử lý ảnh bao gồm lý thuyết và các kỹ thuật liên quan nhằm mục đích tạo ra một hệ thống nhân tạo có thể tiếp nhận thông tin từ các hình ảnh thu được hoặc các tập dữ liệu đa chiều. Đối với mỗi người chúng ta, quá trình nhận thức thế giới bên ngoài là một điều dễ dàng. Quá trình nhận thức đó được “học” thông qua quá trình sống của mỗi người. Tuy nhiên với các vật vô tri vô giác như như các máy tính, robotv..v. thì điều đó quả thực là một bước tiến rất gian nan. Các thiết bị ngày nay không chỉ nhận thông tin ở dạng tín hiệu đơn lẻ mà còn có thể có cái “nhìn” thật với thế giới bên ngoài. Cái “nhìn” này qua quá trình phân tích, kết hợp với các mô hình như máy học, mạng nơron v..v, sẽ giúp cho thiết bị tiến dần tới một hệ thống nhân tạo có khả năng ra quyết định linh hoạt và đúng đắn hơn rất nhiều. Với mong muốn được tham gia, tìm hiểu về lĩnh vực này em đã thực hiện đề tài “Mobile robot bám đối tượng di động”.
-
Tổng quan về robot
- Giới thiệu chung về robot
Thuật ngữ robot được sinh ra từ trên sân khấu, không phải trong phân xưởng sản xuất. Những robot xuất hiện lần đầu tiên trên ở trên NewYork vào ngày 09/10/1922 trong vở “Rossum’s Universal Robot” của nhà soạn kịch người Tiệp Karen Kapek viết năm 1921, còn từ robot là cách gọi tắt của từ robota - theo tiếng Tiệp có nghĩa là công việc lao dịch.
Robot hay người máy là một loại máy có thể thực hiện những công việc một cách tự động bằng sự điều khiển của máy tính. Robot là một tác nhân cơ khí, nhân tạo, thường là một hệ thống cơ khí-điện tử.
Với sự xuất hiện và chuyển động của mình, robot gây cho người ta cảm giác rằng nó giác quan giống như con người. Từ "robot" (người máy) thường được hiểu với hai nghĩa: rô bốt cơ khí và phần mềm tự hoạt động. Về lĩnh vực người máy, Nhật Bản là nước đi đầu thế giới về lĩnh vực này.
Ngày nay robot đang là tâm điểm của một cuộc cách mạng lớn sau Internet. Robot ngày càng được sử dụng rộng rãi trong lĩnh vực công nghiệp, y tế, giáo dục đào tạo, giải trí, an ninh quốc phòng, thám hiểm không gian. Robot là sản phẩm công nghệ có độ phức tạp cao, chứa hàm lượng tri thức vô cùng phong phú về tất cả các lĩnh vực của khoa học và công nghệ.
- Lịch sử phát triển của robot
Vào năm 1948, nhà nghiên cứu Goertz đã nghiên cứu chế tạo loại tay máy đôi điều khiển từ xa đầu tiên, và cùng năm đó hãng General Mills chế tạo tay máy gần tương tự sử dụng cơ cấu tác động là những động cơ điện kết hợp với các cử hành trình. Đến năm 1954, Goertz tiếp tục chế tạo một dạng tay máy đôi sử dụng động cơ servo và có thể nhận biết lực tác động lên khâu cuối. Sử dụng những thành quả đó, vào năm 1956 hãng General Mills cho ra đời tay máy hoạt động trong công việc khảo sát đáy biển. Năm 1968 R.S. Mosher, thuộc hãng General Electric, đã chế tạo một thiết bị biết đi có bốn chân, có chiều dài hơn 3m, nặng 1.400kg, sử dụng động cơ đốt trong có công suất gắn 100 mã lực.
Hình 1.1: Robot 4 chân của hãng R.S Mosher và hãng General Electric
Cũng trong lĩnh vực này, một thành tựu khoa học công nghệ đáng kể đã đạt được vào năm 1970 là xe tự hành thám hiểm bề mặt của mặt trăng Lunokohod 1 được điều khiển từ trái đất.
Hình 1.2: Xe tự hành thám hiểm mặt trăng (Lunokohod 1)
Viện nghiên cứu thuộc Trường Đại học Stanford vào năm 1969 đã thiết kế robot Shakey di động tinh vi hơn để thực hiện những thí nghiệm về điều khiển sử dụng hệ thống thu nhận hình ảnh để nhận dạng đối tượng. Robot này được lập trình trước để nhận dạng đối tượng bằng camera, xác định đường đi đến đối tượng và thực hiện một số tác động trên đối tượng.
Hình 1.3: Robot Shakey-robot đầu tiên nhận dạng đối tượng bằng camera
Năm 1952 máy điều khiển chương trình số đầu tiên ra đời tại học viện công nghệ Massachusetts (Hoa Kỳ). Trên cơ sở đó năm 1954, George Devol đã thiết kế robot lập trình với điều khiển chương trình số đầu tiên nhờ một thiết bị do ông phát minh được gọi là thiết bị chuyển khớp được lập trình. Joseph Engelberger, người mà ngày nay thường được gọi là cha đẻ của robot công nghiệp, đã thành lập hãng Unimation sau khi mua bản quyền thiết bị của Devol và sau đó đã phát triển những thế hệ robot điều khiển theo chương trình. Năm 1962, robot Unmation đầu tiên được đưa vào sử dụng tại hãng General Motors; và năm 1976 cánh tay robot đầu tiên trong không gian đã được sử dụng trên tàu thám hiểm Viking của cơ quan Không Gian NASA của Hoa Kỳ để lấy mẫu đất trên sao Hoả.
Hình 1.4: Tay robot trên tàu thám hiểm Viking 1
Trong hoạt động sản xuất, đa số những robot công nghiệp có hình dạng của “cánh tay cơ khí”,cũng chính vì vậy mà đôi khi ta gặp thuật ngữ người máy - tay máy.
- Các thế hệ robot:
Kể từ khi khái niệm robot ra đời, việc thiết kế và chế tạo robot đã trải qua nhiều giai đoạn với nhiều thế hệ khác nhau. Có 5 thế hệ robot ra đời kể từ năm 1960 .
- Thế hệ thứ nhất: Bao gồm các loại robot hoạt động lặp lại theo một chu trình không thay đổi. Chương trình điều khiển có hai dạng:
- Chương trình “cứng”: không thay đổi hoặc không sửa được trừ khi thay đổi phần cứng.
- Chương trình có thể thay đổi được thông qua các panel điều khiển hoặc thông qua máy tính. Các robot thế hệ này sử dụng cơ cấu điều khiển servo vòng hở (open-loop nonservo controlled system). Đây là hệ thống không sử dụng thông tin phản hồi từ môi trường về để điều khiển robot.
- Thế hệ thứ hai: Robot được trang bị các sensor cho phép robot giao tiếp với môi trường bên ngoài. Các thiết bị này thực chất là các bộ biến đổi năng lượng. Nó chuyển các đại lượng không điện thành đại lượng điện mà qua đó bộ điều khiển robot có thể biết được trạng thái của môi trường xung quanh nó. Nhờ các sensor này robot có thể chọn các phương án khác nhau một cách linh hoạt nhằm thích nghi với môi trường bên ngoài. Dạng robot với trình độ điều khiển này còn được gọi là robot điều khiển thích nghi cấp thấp. Đây gọi là cơ cấu điều khiển servo vòng kín (closed-loop servo controller system).
- Thế hệ thứ ba: các bộ điều khiển logic khả trình PLC (Programmable Logic Controller) được sử dụng trong robot với nhiều chức năng chuyên biệt .
- Thế hệ thứ bốn: Khác với PLC bị giới hạn trong chương trình của chúng, thế hệ robot này sử dụng các máy tính được trang bị các ngôn ngữ lập trình đặc biệt hoặc ngôn ngữ chuẩn như Basic, C, C++....,để tạo ra nhiều ứng dụng CAD/CAM và CIM hoặc chương trình không trực tuyến.
- Thế hệ thứ năm: Các bộ điều khiển của robot sử dụng trí tuệ nhân tạo (artificial intelligence). Robot được trang bị các kỹ thuật như nhận dạng tiếng nói, hình ảnh, xác định khoảng cách, cảm nhận đối tượng tiếp xúc (da nhân tạo) để xử lý, ra những quyết định hợp lý.
- Giới thiệu robot bám đối tượng:
Hệ thống điều khiển robot có thị giác được sử dụng để theo dõi mục tiêu di động trong các ứng dụng công nghiệp, quốc phòng và xã hội. Hệ thống thị giác có thể được phân thành 2 lớp, theo như cấu trúc của hệ, đó là hệ có camera gắn cố định và hệ có camera gắn trên tay máy (eye-in-hand). Trong hệ camera cố định, camera được gắn cố định so với hệ toạ độ thực, thu thập ảnh của cả mục tiêu và cả môi trường. Mục tiêu của hệ này là cung cấp tín hiệu điều khiển sao cho tay máy đạt được vị trí mong muốn. Mục đích của cấu truc eye-in-hand là điều khiển tay máy sao cho ảnh của mục tiêu cố định hay di động luôn được duy trì ở vị trí mong muốn trên mặt phẳng ảnh thu được. Trên cơ sở ảnh thu được từ camera, được số hoá và tích hợp trong vòng điều khiển phản hồi, hệ thống điều khiển các khớp của tay máy.
Các nghiên cứu của môi trường động bị bỏ khá xa so với của môi trường tĩnh do bị ảnh hưởng khá lớn của tốc độ tính toán cũng như độ chính xác của việc phân tích ảnh. Do vậy có nhiều thuật toán để cải thiện tốc độ xử lý và xem xét đến các quà trình nhiễu tác động lên quá trình thu thập hình ảnh.
Một thách thức của thị giác máy là việc phân loại đối tượng. Một robot có thể phải đối mặt với nhiều đối tượng khác nhau, trong khi đó chỉ có một mục tiêu quan tâm, còn các đối tượng khác thì không. Để nhận biết được thông tin về vị trí của mục tiêu trong môi trường động, cácđặc trưng của mục tiêu rất quan trọng. Các điểm lỗ, các góc cạnh, các đặc điểm hình học của mục tiêu được phân tích qua quá trình nhận dạng. Đặc tính về trọng tâm của mục tiêu có thể tính dễ dàng qua moment bâc nhất trong môi trường tĩnh, nhưng trong môi trường động việc này rất khó vì chi phí thời gian tính toán lớn.
Hình 1.5: PANrobot
Hình 1.8: Các giai đoạn chính trong xử lý ảnh
- Quá trình thu nhận ảnh :
Ảnh có thể thu nhận qua Camera. Thường ảnh thu nhận qua Camera là ảnh tín hiệu tương tự (loại camera ống kiểu CCIR), nhưng cũng có thể là tín hiệu số hóa (loại CCD- Charge Coupled Device). Ảnh cũng có thể thu nhận từ các bộ cảm ứng (sensor), hay ảnh được quét trên scanner.
- Quá trình số hoá (Digitalizer): Ảnh sau khi thu về phải được số hoá, đây là bước khá quan trọng chuyển đổi tín hiệu từ analog sang digital thông qua rời rạc hoá (lấy mẫu) và số hoá bằng lượng tử hoá. Ảnh được số hoá để xử lý, phân tích hay lưu trữ bằng máy tính .
- Quá trình phân tích ảnh :
Quá trình này thực chất bao gồm nhiều công đoạn nhỏ. Trước hết là công việc tăng cường ảnh (Image Enhancement) để nâng cao chất lượng ảnh. Do những nguyên nhân khác nhau : Do thiết bị thu nhận ảnh, do nguồn sáng hay do nhiễu, ảnh có thể bị suy biến. Do vậy cần tăng cường và khôi phục lại ảnh (Image Restoration) để làm nổi bật một số đặc tính chính của ảnh, hay làm cho ảnh gần giống nhất với trạng thái gốc - trạng thái trước khi ảnh bị biến dạng. Giai đoạn tiếp theo là phát hiện các đặc tính như biên (Edge detection), phân vùng ảnh (Image Segmentation), trích chọn các đặc tính (Feature Extraction)…
Cuối cùng,tuỳ theo mục đích của ứng dụng, sẽ là giai đoạn nhận dạng, phân lớp hay các quyết định khác.
- Thu ảnh từ camera
Các thiết bị thu nhận ảnh thông thường gồm máy quay (camera) cộng với bộ chuyển đổi tương tự số AD (Analog to Digital) hoặc máy quét (scanner) chuyên dụng.
Các thiết bị thu nhận ảnh này có thể cho ảnh trắng đen (Black & White) với mật độ từ 400 đến 1600 dpi (dot per inch) hoặc ảnh màu 600 dpi. Với ảnh trắng đen mức màu L là 0 hoặc 1. Với ảnh đa cấp xám, mức xám biến thiên từ 0 đến 255. Ảnh màu mỗi điểm ảnh lưu trữ trong 3 bytes và do đó ta có 2 8x3 = 2 24 màu (cỡ 16,7 triệu màu).
Trong xử lý ảnh bằng máy tính, ta không thể không nói đến thiết bị monitor (màn hình) để hiện ảnh. Monitor có nhiều loại khác nhau :
- CGA : 640 x 320 x 16 màu
- EGA : 640 x 350 x 16 màu
- VGA : 640 x 480 x 16 màu
- SVGA : 1024 x 768 x 256 màu
Với ảnh màu, có nhiều cách tổ hợp màu khác nhau. Theo lý thuyết màu do Thomas đưa ra từ năm 1802, mọi màu đều có thể tổ hợp từ 3 màu cơ bản : Red (đỏ), Green (lục), và Blue (lơ).
- Tiền xử lý
Các phương pháp tiền xử lý ảnh là các phương pháp nhằm làm tăng chất lượng ảnh thu nhận được từ các thiết bị thu nhận (camera, máy scanner,…), giúp cho việc nhận dạng ảnh trở nên dễ dàng và nhanh chóng hơn trong giải thuật cũng như tính hiệu quả.
- Chuyển ảnh sang mức xám :
Theo camera sử dụng, ảnh nhận được là ảnh 24 bit màu, dung lượng bộ nhớ dành cho ảnh như đã nói là rất lớn , gấp 3 lần một ảnh đa cấp xám cùng kích thước. Do đó, để giảm bớt khối lượng tính toán nhằm tăng tốc độ xử lý, ta sẽ đưa ảnh về ảnh mức xám (Gray Scale) 8 bit (nghĩa là mỗi pixel sẽ được biểu diễn bằng 1 byte hay 256 cấp độ xám) theo công thức :
X = 0.2125*R + 0.7154*G + 0.0721*B
Quá trình chuyển đổi sang mức xám này tuy có làm mất đi một số thông tin nhưng vẫn có thể chấp nhận được.
- Cân bằng Histogram ( Histogram equalization ) :
- Histogram của một ảnh với các mức xám trong khoảng [ 0 , L-1 ] là một hàm rời rạc
- Trong đó f k là giá trị xám thứ k ( k = 0, 1,…. L-1 ), n k là số pixel với mức xám đó, và n là tổng số pixel của ảnh.
- Nói một cách chính xác hơn Histogram p( f k ) chính là xác suất của biến cố giá trị xám thứ k, xác suất này có giá trị trong khoảng [0, 1].
- Ta cũng có thể biểu diễn Histogram của một ảnh bằng số lần xuất hiện của mỗi mức xám, ta có p( f k ) = n k .
- Đồ thị hàm p( f k ) biểu diễn hình dạng Histogram của một ảnh sẽ cho biết ảnh đó thuộc loại ảnh nào. Như vậy hình dạng Histogram của một ảnh mang đến cho chúng ta những thông tin hữu ích về độ tương phản của ảnh.
- Hình sau biểu diễn bốn loại ảnh cơ bản tương ứng bốn Histogram của chúng:
Bước lượng tử hoá đều này rất cần thiết cho việc sửa lại các giá trị xám của ảnh. Bước này được thực hiện như sau: gọi hmin là giá trị xám nhỏ nhất trong Histogram, g là giá trị xám của ảnh kết quả, h k là giá trị Histogram ứng với giá trị xám thứ k, ta có :
gk = [(hk – hmin)*(L –1)/(1 – hmin) + 0.5]
- Với L là số giá trị xám cực đại .
- Tăng cường độ tương phản (constrast stretching ):
Phương pháp này được dùng cho ảnh có độ tương phản thấp do sự chiếu sáng kém, hay do đặt sai độ mở thấu kính trong quá trình thu ảnh. Ý tưởng của kỹ thuật này là làm tăng các giá trị xám trong một tầm vực ảnh đang được xử lý.
Khi f1 = f2 , g1 = 0 và g2 = L -1 thì hàm này trở thành một hàm Thresholding được mô tả qua hình vẽ mà hàm này tạo ra một ảnh nhị phân. Các giá trị tức thời (f1,g1) và (f2,g2) tạo ra các mức độ dãn rộng mức xám khác nhau, vì vậy ảnh hưởng đến độ tương phản của nó.
- Hàm được minh hoạ bằng biểu thức sau :
af 0 £ f < f1
g = b(f – f1) + g1 f1 £ f < f2
g(f – f2) + g2 f2 £ f < L
Khi a = g = 0 ta gọi đây là phương trình cắt xén (Clipping) được mô tả qua hình vẽ trên. Cắt xén thích hợp cho các trường hợp giảm nhiễu khi tín hiệu vào nằm giữa [f1, f2].
- Bộ lộc Median :
Một trong những khó khăn chính trong các phương pháp làm trơn nhiễu là nó làm mờ các đường biên và các chi tiết sắc nét của ảnh. Lọc trung vị có ưu điểm là lọc nhiễu nhưng không làm mờ ảnh. Trong kỹ thuật này, mức xám của điểm ảnh trung tâm được thay thế bằng trung vị của một chuỗi các mức xám của các điểm ảnh lân cận thay vì giá trị trung bình.
Trung vị m của một chuỗi các giá trị là một giá trị sao cho một nữa các giá trị trong chuỗi nhỏ hơn m và một nữa lớn hơn m.
Giả sử U(m,n) và V(m,n) là ảnh vào và ảnh ra của bộ lọc, lọc trung vị được định nghĩa:
V(m,n ) = Median (U(m-k,n-l)) với k,l [ 1, L ]
Tìm trung vị của của sổ lân cận kích thước JxK của một điểm ảnh ta làm như sau:
- Lấy các phần tử trong cửa sổ ra mảng một chiều (có J*K phần tử).
- Sắp xếp mảng này theo thứ tự từ nhỏ đến lớn.
- Nếu J*K là số lẻ thì phần tử thứ (J*K+1)/ 2 chính là trung vị. Gán giá trị này cho điểm ảnh trung tâm.
- Các khái niệm cơ bản trong xử lý ảnh
- Phần tử ảnh (Pixel)
Ảnh trong thực tế là một ảnh liên tục về không gian và về giá trị độ sáng. Để có thể xử lý ảnh bằng máy tính cần thiết phải tiến hành số hoá ảnh. Trong quá trình số hóa, người ta biến đổi tín hiệu liên tục sang tín hiệu rời rạc thông qua quá trình lấy mẫu (rời rạc hoá về không gian) và lượng hoá thành phần giá trị (rời rạc hoá biên độ giá trị) mà về nguyên tắc mắt thường không phân biệt được hai điểm kề nhau. Trong quá trình này người ta sử dụng khái niệm Picture Element mà ta quen gọi là Pixel - Phần tử ảnh. Như vậy một ảnh là một tập hợp các Pixel. Mỗi pixel gồm một cặp toạ độ x, y và màu.
Cặp toạ độ x,y tạo nên độ phân giải (resolution). Như màn hình máy tính có nhiều độ phân giải khác nhau : Màn hình CGA có độ phân giải là 320 x 200; màn hình VGA là 640 x 350,…
Như vậy, một ảnh là một tập hợp các điểm ảnh. Khi được số hóa nó thường được biểu diễn bởi mảng hai chiều I(n,p) : n dòng và p cột , ta nói ảnh gồm n x p pixels.Người ta thường kí hiệu I(x,y) để chỉ một pixel. Thường giá trị của n chọn bằng p và bằng 256. Một pixel có thể lưu trữ trên 1, 4, 8 hay 24 bit.
Hình 1.12: Biểu diễn ảnh dưới dạng pixel
- Mức xám (Gray level ) :
Mức xám là kết quả sự mã hóa tương ứng một cường độ sáng của mỗi điểm ảnh với một giá trị số, kết quả của quá trình lượng hoá. Cách mã hoá kinh điển thường dùng 16, 32 hay 64 mức. Mã hóa 256 mức là phổ dụng nhất do lý do kỹ thuật. Vì 28 = 256 nên với 256 mức mỗi pixel sẽ được mã hoá bởi 8 bit.
- Ảnh màu :
Ảnh màu là ảnh tổ hợp 3 màu cơ bản : Đỏ (red), lục (Green), xanh lơ (Blue) và thường thu nhận trên các dãi băng tần khác nhau. Mỗi màu cũng phân thành L cấp khác nhau (L thường là 256). Do vậy để lưu trữ ảnh màu, người ta có thể lưu trữ từng mặt màu riêng biệt, mỗi màu lưu trữ như một ảnh đa cấp xám. Do đó không gian nhớ dành cho ảnh màu lớn gấp 3 lần một ảnh đa cấp xám cùng kích thước.
- Ảnh đen trắng :
Thực tế ảnh đen trắng bao gồm ảnh nhị phân và ảnh đa cấp xám. Ảnh đen trắng chỉ bao gồm hai màu: Màu đen và màu trắng. Người ta phân biệt sự biến đổi đó thành L mức. Nếu L=2 thì chỉ có 2 mức: Mức 0 và mức 1, còn gọi là ảnh nhị phân. Mức 1 tương ứng với màu sáng và mức 0 tương ứng với màu tối. Nếu L lớn hơn 2 ta có ảnh đa cấp xám. Việc xác định số mức phụ thuộc vào tiêu chí lượng hoá. L thường chọn 32, 64, 128 và 256. Ảnh 256 mức là ảnh có chất lượng cao và thường được sử dụng.
- Biểu diển ảnh:
Trong biểu diễn ảnh, người ta thường dùng các phần tử đặc trưng của ảnh gọi là Pixel. Nhìn chung có thể xem một hàm hai biến chứa các thông tin như biễu diễn của một ảnh. Các mô hình biểu diễn ảnh cho ta một mô tả logic hay định lượng các tính chất của hàm này. Việc xử lý ảnh số yêu cầu ảnh phải được mẫu hoá và lượng tử hoá.
Một số mô hình thường được dùng trong biểu diễn ảnh: mô hình toán , mô hình thống kê. Trong mô hình toán , ảnh hai chiều được biểu diễn nhờ các hàm hai biến trực giao gọi là các hàm cơ sở. Với mô hình thống kê, một ảnh được coi như một phần tử của một tập hợp đặc trưng bởi các đại lượng như: Kỳ vọng toán học, hiệp biến, phương sai, moment.
- Lấy mẫu và lượng tử hoá :
Hệ quang sau khi bắt ảnh sẽ truyền tính hiệu sang máy tính, máy tính phải lấy mẫu ảnh ở một số hữu hạn điểm và sau đó biểu diễn nó bằng một kích thước hữu hạn trong máy tính. Quá trình này gọi là lấy mẫu và lượng tử hoá. Mỗi mẫu ảnh gọi là một pixel. Chúng ta thường giả sử ảnh được lấy mẫu trên một lưới vuông đều để cho khoảng cách ngang và dọc giữa các pixel là như nhau trong toàn ảnh. Mỗi pixel được biểu diễn trong máy tính bằng một số nguyên nhỏ. Thông thường mỗi pixel được biểu diễn bởi một số nguyên dương dạng 8 bit (từ 0 -> 255) với 0 tương ứng với màu đen còn 255 tương ứng màu trắng và các mức xám khác mang giá trị ở giữa 0 và 255. Nhiều camera bắt ảnh analog, sau đó ảnh analog này được lấy mẫu và lượng tử hoá để chuyển thành ảnh số.
- Tăng cường ảnh và khôi phục ảnh:
Tăng cường ảnh là bước quan trọng, tạo tiền đề cho xử lý ảnh. Nó gồm một loạt các kỹ thuật như: Tăng cường độ tương phản, khử nhiễu, nổi màu,v.v…nhằm hoàn thiện trạng thái quan sát của một ảnh. Nhiệm vụ của tăng cường ảnh không phải là tăng lượng thông tin vốn có trong ảnh mà làm nổi bật các đặc trưng đã chọn.
Khôi phục ảnh đề cập đến các kỹ thuật loại bỏ hay tối thiểu hoá các ảnh hưởng của môi trường bên ngoài tác động đến các ảnh thu được (qua hệ thống thu nhận, phát hiện và lưu trữ ảnh). Các nguyên nhân gây biến dạng : Nhiễu bộ cảm nhận tín hiệu, ảnh mờ do camera, nhiễu ngẫu nhiên của khí quyển,v.v…Khôi phục ảnh gồm nhiều quá trình như: lọc ảnh, khử nhiễu,…nhằm làm giảm các biến dạng để có thể khôi phục ảnh gần giống ảnh gốc nhất. Tăng cường ảnh và khôi phục ảnh tạo nên giai đoạn tiền xử lý ảnh.
- Biến đổi ảnh :
Thuật ngữ biến đổi ảnh (Image Transform) thường dùng để nói tới một lớp các ma trận đơn vị và các kỹ thuật dùng để biến đổi ảnh. Cũng như các tín hiệu một chiều được biểu diễn bởi một chuỗi các hàm cơ sở , ảnh cũng có thể được biểu diễn bởi một chuỗi rời rạc các ma trận cơ sở gọi là ảnh cơ sở. Có nhiều loại biến đổi được dùng như:
- Biến đổi Fourier, Sin, Cosin, Hadamard…
- Tích Kronecker
- Biến đổi KL (Karhumen Loeve): Biến đổi này có nguồn gốc từ khai triển của các quá trình ngẫu nhiên gọi là phương pháp trích chọn các thành phần chính.
- Phân tích ảnh :
Phân tích ảnh liên quan đến việc xác định các độ đo định lượng của một ảnh để đưa ra một mô tả đầy đủ về ảnh. Các kỹ thuật được sử dụng ở đây nhằm mục đích xác định biên của ảnh. Có nhiều kỹ thuật khác nhau như lọc vi phân hay dò theo quy hoach động.
Người ta cũng dùng các kỹ thuật để phân vùng ảnh. Từ ảnh thu được , người ta tiến hành kỹ thuật tách (split) hay hợp (fusion) dựa theo các tiêu chuẩn đánh giá như : Màu sắc, cường độ,v,v…Các phương pháp được biết đến như Quad – Tree, mảnh hoá biên, nhị phân hoá đường biên. Cuối cùng, phải kể đến các kỹ thuật phân lớp dựa theo cấu trúc.
- Nhận dạng ảnh :
Nhận dạng ảnh là quá trình liên quan đến các mô tả đối tượng mà người ta muốn đặc tả nó. Quá trình nhận dạng thường đi sau quá trình trích chọn các đặc tính chủ yếu của đối tượng.Có hai kiểu mô tả đối tượng :
- Mô tả tham số (nhận dạng theo tham số)
- Mô tả theo cấu trúc (nhận dạng theo cấu trúc)
Người ta đã áp dụng kỹ thuật nhận dạng khá thành công với nhiều đối tượng khác nhau như : Nhận dạng chữ (chữ cái, chữ số, chữ có dấu), nhận dạng mặt người. Nhận dạng chữ in hoặc chữ đánh máy phục vụ cho việc tự động hoá quá trình đọc tài liệu, tăng nhanh tốc độ và chất lượng thu thập thông tin từ máy tính. Nhận dạng chữ viết tay (với mức ràng buộc khác nhau về cách viết, kiểu chữ,…) phục vụ cho nhiều lĩnh vực.
Ngoài hai kỹ thuật nhận dạng trên, hiện nay một kỹ thuật nhận dạng mới là nhận dạng dựa vào mạng neutral đang được áp dụng và cho kết quả khả quan. Tuy vậy, trong thời gian tới chắc chắn sẽ xuất hiện thêm nhiều kỹ thuật nhận dạng mới.
- Nén ảnh :
Dữ liệu ảnh cũng như các dữ liệu khác cần phải lưu trữ hay truyền đi trên mạng. Như đã nói ở trên, lượng thông tin để biểu diễn cho một ảnh là rất lớn. Do đó làm giảm lượng
thông tin hay nén dữ liệu là một nhu cầu cần thiết. Nhiều phương pháp nén dữ liệu đã được nghiên cứu và áp dụng cho các loại dữ liệu đặc biệt này.
- Không gian màu
Không gian màu là mô hình toán học dùng để mô tả màu sắc trong thực tế được biễu diễn dưới dạng số học. Trên thực tế có rất nhiều không gian màu khác nhau được mô hình được sử dụng trong nhiều mục đích khác nhau.
- Không gian màu RGB
RGB là không gian màu rất phổ biến được dùng trong đồ họa máy tính và nhiều thiết bị kĩ thuật số khác. Ý tưởng chính của không gian màu này là sự kết hợp của 3 màu sắc cơ bản : màu đỏ (R, Red), xanh lục (G, Green) và xanh lơ (B, Blue) để mô tả tất cả các màu sắc khác.
Nếu như một ảnh số được mã hóa bằng 24bit, nghĩa là 8bit cho kênh R, 8bit cho kênh G, 8bit cho kênh B, thì mỗ kênh này màu này sẽ nhận giá trị từ 0-255. Với mỗi giá trị khác nhau của các kênh màu kết hợp với nhau ta sẽ được một màu khác nhau, như vậy ta sẽ có tổng cộng 255x255x255 = 1.66 triệu màu sắc. Ví dụ: màu đen là sự kết hợp của các kênh màu (R, G, B) với giá trị tương ứng (0, 0, 0) màu trắng có giá trị (255, 255, 255), màu vàng có giá trị (255, 255, 0), màu tím đậm có giá trị (64, 0, 128) ...Nếu ta dùng 16bit để mã hóa một kênh màu (48bit cho toàn bộ 3 kênh màu) thì dãi màu sẽ trãi rộng lên tới = ... Một con số rất lớn.
Hình 1.13:Không gian màu RGB
- Không gian màu HSV
HSV và cũng gần tương tự như HSL là không gian màu được dùng nhiều trong việc chỉnh sữa ảnh, phân tích ảnh và một phần của lĩnh vực thị giác máy tính. Hệ không gian này dựa vào ba thông số sau để mô tả màu sắc: H = Hue: màu sắc, S = Saturation: độ đậm đặc, sự bảo hòa, V = value: giá trị cường độ sáng.
Không gian màu này thường được biểu diễn dưới dạng hình trụ hoặc hình nón.
Hình 1.14: Không gian màu HSV
Hình 1.15: Giá trị Hue tương ứng với các màu
Theo đó, đi theo vòng tròn từ 0 -360 độ là trường biểu diễn màu sắc(Hue). Trường này bắt đầu từ màu đỏ đầu tiên (red primary) tới màu xanh lục đầu tiên (green primary) nằm trong khoảng 0-120 độ, từ 120 - 240 độ là màu xanh lục tới xanh lơ (green primary - blue primary). Từ 240 - 360 là từ màu đen tới lại màu đỏ.
Theo như cách biểu diễn không gian màu theo hình trụ như trên, đi từ giá trị độ sáng (V) được biểu diễn bằng cách đi từ dưới đáy hình trụ lên và nằm trong khoảng từ 0 -1. Ở đáy hình trụ V có giá trị là 0, là tối nhất và trên đỉnh hình trụ là độ sáng lớn nhất (V = 1). Đi từ tâm hình trụ ra mặt trụ là giá trị bão hòa của màu sắc (S). S có giá trị từ 0 - 1. 0 ứng với tâm hình trụ là chỗ mà màu sắc là nhạt nhất. S = 1 ở ngoài mặt trụ, là nơi mà giá trị màu sắc là đậm đặc nhất.
Như vậy với mỗi giá trị (H, S, V) sẽ cho ta một màu sắc mà ở đó mô tả đầy đủ thông tin về máu sắc, độ đậm đặc và độ sáng của màu đó.
......................................................
CHƯƠNG 3
LÝ THUYẾT ĐIỀU KHIỂN MỜ VÀ BỘ LỌC KALMAN
3.1 Lý thuyết điều khiển mờ
3.1.1 Giới thiệu về logic mờ
Khái niệm logic mờ được giáo sư L.A Zadeh công bố lần đầu tiên tại Mỹ năm 1965, tại trường đại học Berkeyley, bang California, Mỹ. Từ đó, lý thuyế mờ đã có nhiều phát triển và được ứng dụng rộng rãi trong lĩnh vực điều khiển – tự động hóa.
- Năm 1970, tại trường đại học Mary Queen, thành phố London nước Anh, Ebrahim Mandani đã sử dụng logic mờ điều khiển 1 máy hơi nước mà ông không thể điều khiển bằng kĩ thuật cổ điển.
- Tại Nhật, logic mờ được ứng dụng vào nhà máy xử lý nước của hãng Fuji Electronic vào năm 1983, hệ thống xe điện ngầm của Hitachi năm 1987. Tuy logic mờ ra đời ở Mỹ, ứng dụng đầu tiên ở Anh, nhưng lại phát triển và ứng dụng nhiều nhất ở Nhật.
- Ưu điểm của bộ điều khiển mờ so với các bộ điều khiển kinh điển là có thể tổng hợp được bộ điều khiển mà không cần biết trước đặc tính của đối tượng một cách chính xác. Điều này thực sự hữu dụng cho các đối tượng phức tạp mà ta chưa biết rõ hàm truyền.
- Điều khiển mờ chỉ cần xử lý những thông tin không chính xác hay không đầy đủ, những thông tin mà sự chính xác của chúng chỉ nhận thấy được giữa các mối quan hệ của chúng với nhau và cũng chỉ có thể mô tả bằng ngôn ngữ, nhưng vẫn có thể đưa ra quyết định chính xác. Điều khiển mờ hay còn gọi là điều khiển thông minh, mô phỏng trên phương thức xử lý thông tin và điều khiển của con người, khởi đầu cho sự sử dụng trí tuệ nhân tạo trong lĩnh vực điều khiển.
- Xét một ví dụ về logic mờ:
Có một người đang lái thuyền trên sông, khi đó người lái thuyền được xem như thiết bị điều khiển và chiếc thuyền là đối tượng điều khiển. Nhiệm vụ của người lái thuyền là điều khiển thuyền tới bến an toàn. Muốn tìm hiểu phương thức của người lái thuyền thì phải xem xét người đó cần phải xử lý những thông tin gì và xử lý như thế nào.
+ Đại lượng điều khiển thứ nhất: là hướng di chuyển của mũi thuyền, phụ thuộc vào dòng sông phía trước của thuyền. Người điều khiển có nhiệm vụ điều khiển chiếc thuyền đi đúng phần sông quy định, tức là luôn giữ thuyền nằm trong phần bên phải của lòng sông (gần về phía bên phải dòng sông hơn, nhưng tránh không quá gần bờ để không bị mắc cạn), trừ trường hợp phải vượt chiếc thuyền khác. Để làm việc này người lái thuyền không cần phải biết chính xác rằng chiếc thuyền mình đang cách bờ bao nhiêu mét, mà chỉ cần nhìn vào dòng sông trước mặt, người đó có thể suy ra chiếc thuyền đang cách bờ bên phải dòng sông nhiều hay ít, có còn nằm bên phải dòng sông không từ đó đưa ra quyết định phải đánh tay lái qua bên phải mạnh hay nhẹ.
+ Đại lượng điều khiển thứ hai: là tốc độ của thuyền. Với nguyên tắc để cảm thấy chuyến đi được thoải mái và tiết kiệm xăng, người lái thuyền có nhiệm vụ giữ nguyên tốc độ của thuyền, tránh thay đổi tốc độ của thuyền khi không cần thiết. Giá trị về tốc độ thuyền mà người lái thuyền cần phải giữ phụ thuộc vào nhiều yếu tố như: thời tiết mưa hay nắng, cảnh quan, mật độ thuyền trên sông…, và cũng phụ thuộc vào người lái có quen với đoạn sông đó hay không ? Tuy nhiên quy luật điều khiển này cũng không phải có định.
Giả sử trước mặt có một chiếc thuyền khác với kích cỡ lớn đi chậm vào chiếm hết vị trí dòng sông phía trước. Vậy thay vì giữ nguyên tốc độ, người lái thuyền phải thực hiện một nhiệm vụ khác: giảm tốc độ thuyền và tự điều khiển theo một tốc độ mới, phụ hợp với sự phản ứng của chiếc thuyền phía trước cho tới khi người lái thuyền điều khiển chiếc thuyền của mình vượt qua chiếc thuyền kia.
+ Ngoài hai địa lượng điều khiển trên, người lái thuyền cũng phải quan tâm tới các trạng thái khác của thuyền như: động cơ của thuyền có hoạt động quá nóng không, hệ thống chân vịt còn đảm bảo không, thuyền có bị vào nước do bị thủng không… để có thể sửa chữa, tránh bị đắm thuyền hay gây tai nạn trên sông.
+ Đối tượng điều khiển là chiếc thuyền cũng có những thông số thay đổi cần được thu thập và giám sát thường xuyên cho công việc ra quyết định về đại lượng điều khiển. Sự thay đổi các tham số đó, người lái thuyền có thể nhận biết được trực tiếp qua các đèn báo hiệu trong thuyền, song cũng có thể gián tiếp qua phản ứng của thuyền với các đại lượng điều khiển.
+ Người lái thuyền đã thực hiện tốt chức năng của một bộ điều khiển. Từ thu thập thông tin, thực hiện thuật toán điều khiển cho đến đưa tín hiệu điều khiển kịp thời mà không cần biết một cách chính xác về vị trí, tốc độ, tình trạng… của thuyền. Hoàn toàn ngược với điều khiển chính xác, người lái thuyền cũng chỉ cần đưa ra những đại lượng điều khiển theo nguyên tắc xử lý “mờ” như:
- Nếu thuyền hướng nhẹ qua phía giữa dòng sông và có xu hướng qua bên trái dòng sông thì đánh tay lái nhẹ sang phải. Còn nếu thuyền đột ngột chuyển hướng ra phía giữa dòng sông và có thể lấn sang phía bên trái dòng sông thì đánh mạnh tay lái sang phải.
- Nếu thuyền hướng nhẹ về phía bên phải thì đánh tay lái nhẹ sang trái. Còn nếu thuyền đột ngột chuyển hướng về phía bên phải và có thể bị mắc cạn do quá gần bờ thì đánh mạnh tay lái về phía bên trái.
- Nếu mật độ thuyền trên sông ít, tầm nhìn không bị hạn chế: tốc độ thuyền có thể cao hơn tốc độ bình thường một chút.
- Nếu mật độ thuyền trên sông nhiều, tầm nhìn bị hạn chế: tốc độ thuyền có thể thấp hơn tốc độ bình thường một chút.
3.1.2 Một số khái niệm cơ bản
Một cách tổng quát, hệ mờ là tập hợp các quy tắc dưới dạng If… Then (Nếu… Thì) để mô phỏng hành vi của con người và tích hợp vào cấu trúc điều khiển của hệ thống.
- Kĩ thuật thiết kế một hệ mờ mang rất nhiều tính chủ quan, tùy thuộc rất nhiều vào kinh nghiệm và kiến thức của người thiết kế. Ngày nay, tuy kĩ thuật mờ đã phát triển vượt bậc, nhưng vẫn chưa có một cách thức chuẩn và hiệu quả cho việc thiết kế hệ thống mờ. Việc thiết kế vẫn dựa vào kĩ thuật rất cơ bản là: Thử - Sai – Sửa, mất nhiều thời gian cho việc chỉnh sửa để đạt được một kết quả có thể chấp nhận được.
- Tập mờ
.........................................................
CHƯƠNG 6
KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN
6.1 Một số hình ảnh về hoạt động của hệ thống
- Nhận dạng đối tượng màu xanh (ở trong phòng vào lúc 4 giờ chiều trời nắng) giá trị phân ngưỡng trong hệ màu HSV là (65, 50, 20) – (95, 255, 255).
Hình 6.1: Nhận dạng đối tượng màu xanh vào ban ngày
- Nhận dạng đối tượng màu xanh (ở trong phòng buổi tối có đèn) giá trị phân ngưỡng trong hệ màu HSV là (65, 10, 10) – (95, 255, 255).
Hình 6.2: Nhận dạng đối tượng màu xanh vào ban đêm (có đèn)
- Nhận dạng đối tượng màu vàng (ở trong phòng buổi tối có đèn) giá trị phân ngưỡng hệ màu HSV là (20, 30, 30) – (35, 255, 255).
Hình 6.3: Nhận dạng đối tượng màu vàng vào ban đêm (có đèn)
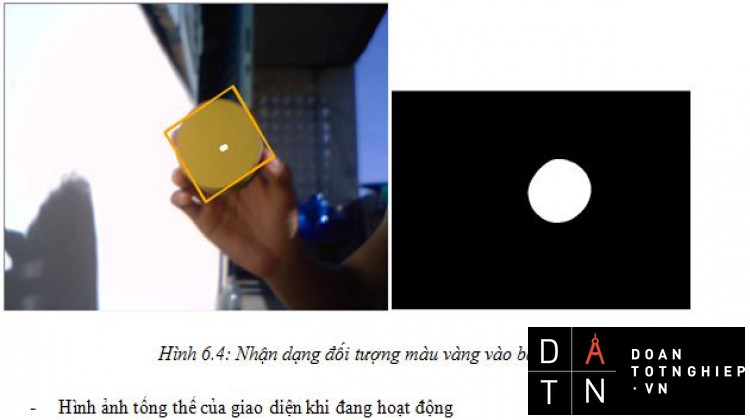
- Nhận dạng đối tượng màu vàng (ở ngoài trời vào lúc 9 giờ trời nắng) giá trị phân ngưỡng hệ màu HSV là (20, 30, 30) – (35, 255, 255).
Hình 6.4: Nhận dạng đối tượng màu vàng vào ban ngày
- Hình ảnh tổng thể của giao diện khi đang hoạt động
Hình 6.5: Hình ảnh tổng thể của giao diện khi đang hoạt động
6.2 Những vấn đề đã thực hiện được
- Thực hiện được phần cơ khí của đề tài và các board mạch điều khiển, chạy tương đối ổn định.
- Nhận dạng được những đối tượng có màu sắc khác nhau.
- Nghiên cứu và sử dụng bộ lọc Kalman để bám đối tượng.
- Điều khiển được robot bám theo đối tượng tương đối uyển chuyển nhờ bộ điều khiển PD mờ(sai số khoảng 2cm).
- Xây dựng thành công giao diện điều khiển.
- Hạn chế của đề tài
- Nhận diện đối tượng còn đơn giản. Đôi khi không nhận dạng được đối tượng vì điều kiện ánh sáng và các điều kiện môi trường khác.
- Robot bám chỉ bám đối tượng có tốc độ tương đối.
- Giao diện còn đơn giản.
6.4 Hướng phát triển của đề tài
- Thực hiện việc nhận dạng đối tượng dựa vào các thuật toán nhận dạng như Haar, dùng mạng thần kinh.
- Hoàn thiện, phát triển bộ điều khiển mờ.
- Sử dụng camera wireless hoặc Bluetooth.
- Đo khoảng cách dùng phương pháp tổng quát hơn.
DANH SÁCH HÌNH ẢNH
Hình 1.1: Robot 4 chân của hãng R.S Mosher và hãng General Electric....................................... 2
Hình 1.2: Xe tự hành thám hiểm mặt trăng (Lunokohod 1)............................................................ 2
Hình 1.3: Robot Shakey-robot đầu tiên nhận dạng đối tượng bằng camera................................... 3
Hình 1.4: Tay robot trên tàu thám hiểm Viking 1............................................................................ 4
Hình 1.5: PANrobot......................................................................................................................... 5
Hình 1.6: Robot MIDbo................................................................................................................... 6
Hình 1.7: Pops................................................................................................................................. 6
Hình 1.8: Các giai đoạn chính trong xử lý ảnh............................................................................... 7
Hình 1.9: Các Histogram tương ứng với bốn loại ảnh.................................................................... 9
Hình 1.10: Sơ đồ khối cho giải thuật cân bằng Histogram........................................................... 10
Hình 1.11: Biễu diễn các hàm dãn rộng độ tương phản............................................................... 10
Hình 1.12: Biểu diễn ảnh dưới dạng pixel..................................................................................... 12
Hình 1.13:Không gian màu RGB.................................................................................................. 15
Hình 1.14: Không gian màu HSV.................................................................................................. 16
Hình 1.15: Giá trị Hue tương ứng với các màu............................................................................ 16
Hình 2.1: Sơ đồ chân của vi điều khiển pic 18f4431..................................................................... 18
Hình 2.2: Tổ chức bộ nhớ chương trình của pic 18f4431............................................................. 25
Hình 2.3: Tổ chức bộ nhớ dữ liệu.................................................................................................. 26
Hình 2.4: Sơ đồ hoạt động các port của pic 18f4431.................................................................... 26
Hình 2.5: Thanh ghi T0CON......................................................................................................... 29
Hình 2.6: Thanh ghi T1CON......................................................................................................... 30
Hình 2.7: Sơ đồ khối module PWM............................................................................................... 33
Hình 2.8: Chức năng của thanh ghi PTCON0.............................................................................. 34
Hình 2.9: Chức năng của thanh ghi PTCON1.............................................................................. 34
Hình 2.10: Chức năng của thanh ghi PWMCON0........................................................................ 35
Hình 2.11: Chức năng của thanh ghi PWMCON1........................................................................ 36
Hình 2.12: Xuất xung kiểu tự do của module PWM...................................................................... 37
Hình 2.13: Xuất xung kiểu single-shot của module PWM.............................................................. 37
Hình 2.14: Chế độ running count của bộ đếm PWM..................................................................... 38
Hình 2.15: Chế độ up/down couting của bộ đếm PWM................................................................ 38
Hình 2.16: Chu kì nhiệm vụ của PWM.......................................................................................... 39
Hình 2.17: Cách thức tạo xung PWM............................................................................................ 39
Hình 2.18: Thời gian chết trong PWM.......................................................................................... 40
Hình 2.19: Thanh ghi DTCON...................................................................................................... 40
Hình 2.20: Sơ đồ khối QEI............................................................................................................ 41
Hình 2.21: Thanh ghi QEICON.................................................................................................... 41
Hình 2.22: Cấu tạo encoder.......................................................................................................... 43
Hình 2.23: Incremental encoder.................................................................................................... 44
Hình 2.24: Absolute encoder........................................................................................................ 44
Hình 2.25: Cổng giao tiếp RS232.................................................................................................. 45
Hình 2.26: Tín hiệu từ Uart và chuẩn RS232................................................................................ 46
Hình 3.1: Tập rõ............................................................................................................................ 49
Hình 3.2: Tập mờ.......................................................................................................................... 49
Hình 3.3: Hàm liên thuộc.............................................................................................................. 50
Hình 3.4: Các dạng hàm liên thuộc............................................................................................... 51
Hình 3.5: Cấu trúc hàm liên thuộc................................................................................................ 52
Hình 3.6: Sự phân hoạch mờ......................................................................................................... 52
Hình 3.7: Biến ngôn ngữ và giá trị ngôn ngữ................................................................................ 53
Hình 3.8: Giao của hai tập mờ toán tử MIN................................................................................. 53
Hình 3.9: Hợp của hai tập mờ toán tử MAX................................................................................. 54
Hình 3.10: Bù của tập mờ............................................................................................................. 54
Hình 3.11: Phương pháp suy diễn MAX – MIN............................................................................ 56
Hình 3.12: Phương pháp suy diễn MAX – PROB......................................................................... 56
Hình 3.13: Suy luận từ hệ qui tắc mờ............................................................................................ 57
Hình 3.14: Sơ đồ một hệ mờ.......................................................................................................... 58
Hình 3.15: Các phương pháp giải mờ.......................................................................................... 60
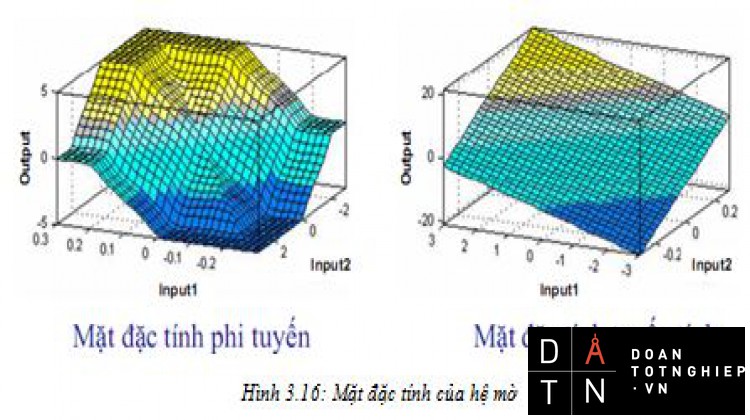
Hình 3.16: Mặt đặc tính của hệ mờ............................................................................................... 61
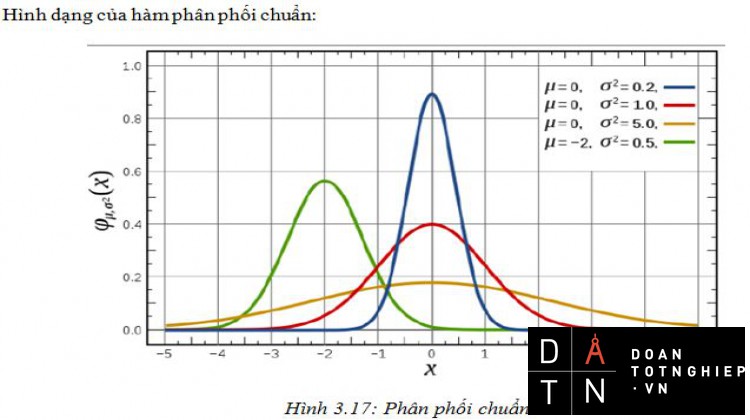
Hình 3.17: Phân phối chuẩn.......................................................................................................... 63
Hình 3.18: Sơ đồ chung của bộ lọc............................................................................................... 65
Hình 3.19: Mô hình tổng quát bộ lọc Kalman............................................................................... 68
Hình 3.20: Quá trình làm việc của bộ lọc Kalman........................................................................ 74
Hình 4.1: Sơ đồ khối của hệ thống................................................................................................ 75
Hình 4.2: Mạch chuyển đổi 12VDC (AC) sang 5VDC.................................................................. 76
Hình 4.3: Quan hệ điện áp ngõ vào và ra trên LM 7805............................................................... 76
Hình 4.4: Sơ đồ mạch điều khiển pic 18f4431............................................................................... 78
Hình 4.5: Mạch điều khiển trong thực tế....................................................................................... 78
Hình 4.6: Sơ đồ mạch giao tiếp RS232.......................................................................................... 79
Hình 4.7: Mạch giao tiếp RS232 trong thực tế.............................................................................. 79
Hình 4.8: Sơ đồ mạch điều khiển động cơ MD2B......................................................................... 80
Hình 4.9: Mạch công suất điều khiển động cơ trong thực tế......................................................... 81
Hình 4.10: Nguồn pin 12VDC....................................................................................................... 81
Hình 4.11: Động cơ dùng cho robot.............................................................................................. 82
Hình 4.12: Camera dùng trong đề tài............................................................................................ 82
Hình 4.13: Mô hình khai đã hoàn thành........................................................................................ 83
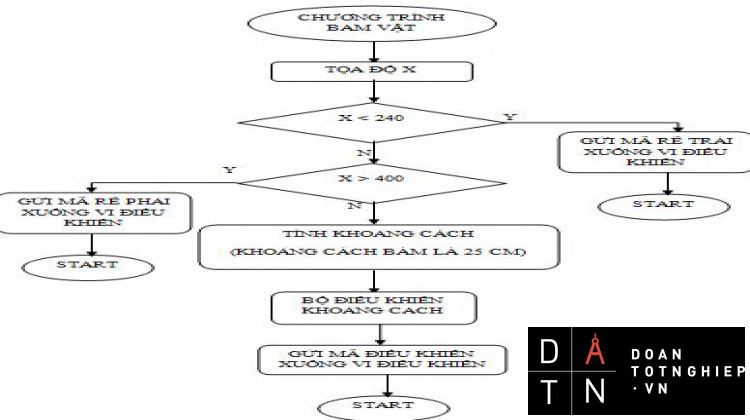
Hình 5.1: Lưu đồ giải thuật điều khiển bám đối tượng.................................................................. 85
Hình 5.2: Lưu đồ giải thuật điều khiển mobile robot bằng tay...................................................... 86
Hình 5.3: Lưu đồ giải thuật điều khiển trên vi điều khiển.............................................................. 88
Hình 5.4: Sơ đồ tổng quát bộ điều khiển PD mờ dùng hệ qui tắc Mandani.................................. 91
Hình 5.5: Tập mờ của ngõ vào sai số e......................................................................................... 91
Hình 5.6: Tập mờ ngõ vào sai số de.............................................................................................. 92
Hình 5.7: Tập mờ ngõ ra điều khiển U.......................................................................................... 92
Hình 5.8: Mặt đặc tính của bộ điều khiển đã được thiết kế........................................................... 93
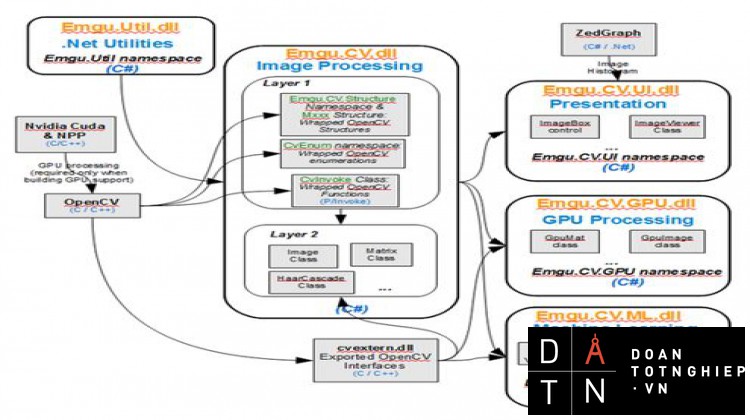
Hình 5.9: Cấu trúc thư viện Emgucv............................................................................................. 94
Hình 5.10: Giao diện điều khiển từ máy tính................................................................................. 95
Hình 6.1: Nhận dạng đối tượng màu xanh vào ban ngày............................................................. 97
Hình 6.2: Nhận dạng đối tượng màu xanh vào ban đêm (có đèn)................................................ 97
Hình 6.3: Nhận dạng đối tượng màu xanh vào ban đêm (có đèn)................................................ 98
Hình 6.4: Nhận dạng đối tượng màu vàng vào ban ngày............................................................. 98
Hình 6.5: Hình ảnh tổng thể của giao diện khi đang hoạt động.................................................... 99
DANH SÁCH BẢNG BIỂU
Bảng 2.1: Đặc điểm chung của vi điều khiển pic 18f4431 17
Bảng 2.2: Các thanh ghi đặc biệt của vi điều khiển pic 18f4431 19
Bảng 2.3: Chức năng các chân của vi điều khiển pic 18f4431 20
Bảng 2.4: Chức năng của port a 27
Bảng 2.5: Chức năng của port b 27
Bảng 2.6: Chức năng của port c 28
Bảng 2.7: Chức năng của port d.............................................................................................................................. 28
Bảng 2.8: Chức năng của port e.................................................................................................... 29
Bảng 3.1: Các kí hiệu thường dùng trong bộ lọc Kalman............................................................. 67
Bảng 3.2: Các kí hiệu liên quan vector trạng thái......................................................................... 67
Bảng 3.3: Kích thước các ma trận trong bộ lọc Kalman............................................................... 68
Bảng 3.4: Tóm tắt các phương trình của bộ lọc Kalman.............................................................. 74
Bảng 5.1: Khoảng cách tương ứng với diện tích của đối tượng.................................................... 91
Bảng 5.2: Luật điều khiển trong bộ điều khiển PD mờ................................................................. 92
TÀI LIỆU THAM KHẢO
- Tài liệu, sách
[1] Tài liệu giảng dạy Nhập môn điều khiển thông minh, Huỳnh Thái Hoàng
[2] Kalman Filtering Theory and Practice Using Matlab, Mohinder S. Grewal & Angus P.Andrews
[3] Giáo trình xử lý ảnh, Đỗ Năng Toàn, NXB Khoa học và Kỹ thuật, 2008
[4] Giáo trình điện tử công suất, Nguyễn Văn Nhờ, NXB ĐHQG TP.HCM, 2003
[5] Emgu.CV.Documentation, tải từ http://www.emgu.com/wiki/index.php/Main_Page
[6] Datasheet pic 18f4431, tải từ http://www.alldatasheet.com
[7] Hướng dẫn lập trình C#, tải từ http://www.payitforward.edu.vn/
[8] Luận văn về đề tài Mobile Robot bám đối tượng của các anh chị khóa trước.
TRƯỜNG ĐẠI HỌC BÁCH KHOA CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
KHOA: ĐIỆN – ĐIỆN TỬ Độc Lập - Tự Do - Hạnh Phúc
--------------------------------------
Ngày tháng năm
PHIẾU CHẤM BẢO VỆ LVTN
(Dành cho người hướng dẫn)
1... Họ và tên SV : NGUYỄN THÀNH PHIÊN MSSV :40801535
Ngành (chuyên ngành) : ĐIỀU KHIỂN TỰ ĐỘNG
2... Đề tài : “MOBILE ROBOT BÁM ĐỐI TƯỢNG DI ĐỘNG”
3... Họ tên người hướng dẫn: TS. Nguyễn Thiện Thành
4. Tổng quát về bản thuyết minh :
Số trang : .................... Số chương : ..................
Số bảng số liệu : .................... Số hình vẽ : ..................
Số tài liệu tham khảo :..................... Phần mềm tính toán : ..................
Hiện vật (sản phẩm) :.....................
5. Tổng quát về các bản vẽ :
- Số bản vẽ : bản A1 bản A2 khổ khác
- Số bản vẽ tay Số bản vẽ trên máy tính
6... Những ưu điểm chính của LVTN : .......................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
7... Những thiếu sót chính của LVTN :.......................................................................................
...............................................................................................................................................
.....................................................................................................................................................
..... ...............................................................................................................................................
.....................................................................................................................................................
8. Đề nghị : Được bảo vệ Bổ sung thêm để bảo vệ Không được bảo vệ
9. Câu hỏi SV phải trả lời trước Hội đồng (CBPB ra ít nhất 02 câu):
- .............................................................................................................................
- .............................................................................................................................
- .............................................................................................................................
Đánh giá chung (bằng chữ : giỏi, khá, TB) : Điểm _____/10
Ký tên (ghi rõ họ tên)





