NGHIÊN CỨU TÍNH TOÁN THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH TRUYỀN NHIỆT VÀ GIỮ NHIỆT DẠNG TẤM PHẲNG CHO THIẾT BỊ LÒ HƠI DÙNG NĂNG LƯỢNG MẶT TRỜI


NỘI DUNG ĐỒ ÁN
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP.HCM
KHOA CƠ KHÍ CHẾ TẠO MÁY
BỘ MÔN CƠ ĐIỆN TỬ
------------o0o------------
ĐỒ ÁN TỐT NGHIỆP
ĐỀ TÀI :
NGHIÊN CỨU - TÍNH TOÁN – THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH TRUYỀN NHIỆT VÀ GIỮ NHIỆT DẠNG TẤM PHẲNG CHO THIẾT BỊ LÒ HƠI DÙNG NĂNG LƯỢNG MẶT TRỜI
LỜI NÓI ĐẦU
Ngày nay, khi nguồn năng lượng hóa thạch đang dần cạn kiệt, sự leo thang của giá xăng dầu. Một yêu cầu tất yếu được đặt ra là phải tìm ra những nguồn năng lượng thay thế hiệu quả, năng lượng mặt trời với ưu điểm là nguồn năng lương thân thiện với môi trường, kinh tế, được xem như nguồn năng lượng của tương lai. Việt Nam là nước nằm trong vùng nhiệt đới, lượng nắng chiếu sáng rất lớn việc khai thác nguồn năng lượng này bên cạnh các nguồn năng lượng truyền thống như thủy điện, nhiệt điện… là rất cần thiết đễ giả quyết bài toán an ninh năng lương và giãm ô nhiễm môi trường.
Trong xu hướng phát triển tự động hoá trong ngành công nghiệp trên thế giới, việc tự động hoá không chỉ riêng mỗi một ngành như cơ khí, điện hoặc điện tử. Mà là sự kết hợp của tất cả các ngành như: điện, điện tử, cơ khí, tin học, thuỷ lực, khí nén, vi xử lý, PLC... đã đạt được nhiều thành tựu cao. Hình ảnh con người đứng trong các các dây chuyền sản xuất đã trở nên lạc hậu, việc xuất hiện các dây chuyền sản xuất tự động ngày càng phổ biến. Vì vậy dựa trên những cơ sở trên, nhóm sinh viên thực hiện Đồ Án Tốt Nghiệp đã chọn đề tài:
NGHIÊN CỨU - TÍNH TOÁN – THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH TRUYỀN NHIỆT VÀ GIỮ NHIỆT DẠNG TẤM PHẴNG CHO THIẾT BỊ LÒ HƠI DÙNG NĂNG LƯỢNG MẶT TRỜI

Mặc dù rất cố gắng, nhưng vì những hạn chế về kiến thức, kinh nghiệm cũng như thiết bị đã khiến cho đề tài gặp nhiều thiếu sót. Kính mong sự góp ý, nhận xét từ quý thầy cô và các bạn.
TÓM TẮT NỘI DUNG ĐỀ TÀI
Đề Tài: Nghiên cứu, tính toán, thiết kế và chế tạo mô hình truyền nhiệt và giữ nhiệt dạng tấm phẳng cho thiết bị lò hơi dùng năng lượng mặt trời.
Phần nội dung nghiên cứu bao gồm 3 phần . Nội dung khái quát của từng phần như sau:
Phần A: DẪN NHẬP
Phần B: CƠ SỞ LÝ THUYẾT
Phần C: MÔ HÌNH VÀ KẾT QUẢ THÍ NGHIỆM
ABSTRACT
Subject: Study, calculate, design, make transfering and maintaining model in flat collector form for steam box using power of solar.
Content consists of three parts:
Part A: introduction.
Part B: basic theories.
Part C: model and result of experiments.
MỤC LỤC
- Nhiệm vụ đề tài
- Nhận xét của giáo viên hướng dẫn
- Nhận xét của giáo viên phản biện
- Nhận xét của hội đồng chấm đồ án
- Lời cảm ơn
- Lời nói đầu
- Tóm tắt nội dung đề tài
PHẦN A: DẪN NHẬP1
PHẦN B: CƠ SỞ LÝ THUYẾT........................................................................ 4
CHƯƠNG 1: TỔNG QUAN VỀ NĂNG LƯỢNG MẶT TRỜI................... 5
1.1 Khái niệm về năng lượng mặt trời...................................................... 5
1.2 Thiết bị sử dụng năng lượng mặt trời................................................. 5
1.2.1 Pin mặt trời............................................................................................ 6
1.2.2 Nhà máy nhiệt sử dụng năng lượng mặt trời..................................... 6
1.2.3 Thiết bị sấy khô dùng năng lượng mặt trời........................................ 7
1.2.4 Bếp nấu dùng năng lượng mặt trời..................................................... 8
1.2.5 Thiết bị chưng cất nước dùng năng lượng mặt trời.......................... 8
1.2.6 Động cơ stirling chạy bằng năng lượng mặt trời.............................. 9
1.2.8 Thiết bi làm lạnh và điều hòa không khí dùng năng lượng mặt trời
.......................................................................................................................... 10
1.3 Các loại bộ thu...................................................................................... 11
1.3.1 Bộ thu phẳng......................................................................................... 11
1.3.2 Bộ thu kiểu ống có gương phản xạ dạng parabol trụ....................... 13
1.3.3 Các loại gương phản xạ....................................................................... 14
1.3.3.4 Gương parapol.................................................................................. 15
1.3.3.5 Dạng ống thủy tinh chân không..................................................... 16
1.4 Tính kinh tế của các thiết bị sử dụng năng lượng mặt trời.............. 17
1.5 Một số loại lò hơi công nghiệp.......................................................... 18
1.5.1 Lò hơi ống lửa (Fire Tub Boiler)....................................................... 18
1.5.2 Lò hơi ống nước (Water Tube Boiler).............................................. 19
1.5.3 Lò hơi trọn bộ (Package Boiler)........................................................ 19
1.5.4 Lò hơi buồng lửa tầng sôi (FBC)...................................................... 20
1.5.5 Lò hơi buồng lửa tầng sôi không khí (AFBC)................................ 21
1.5.6 Lò hơi buồng lửa tầng sôi điều áp (PFBC)....................................... 21
1.5.7 Lò hơi buồng lửa tầng sôi tuần hoàn khí (CFBC)........................... 21
1.5.8 Lò hơi sử dụng nhiệt thải.................................................................... 21
CHƯƠNG 2: TÍNH TOÁN TRUYỀN NHIỆT, GIỮ NHIỆT, TỔN THẤT NHIỆT 22
2.1 Truyền nhiệt, giữ nhiệt......................................................................... 22
2.1.1 Hiệu ứng nhà kính................................................................................ 22
2.1.2 Sự phản xạ của bức xạ mặt trời.......................................................... 23
2.1.3 Tổn thất do hấp thụ của kính.............................................................. 24
2.1.4 Hệ số truyền qua và hệ số phản xạ của kính.................................... 24
2.1.5 Hệ số truyền qua đối với bức xạ khuếch tán.................................... 25
2.1.6 Cân bằng nhiệt và nhiệt độ cân bằng của vật thu bức xạ mặt trời. 26
2.1.7 Tích số của hệ số truyền qua và hệ số hấp thụ (DA)...................... 27
2.1.8 Chu trình đối lưu tự nhiên và chu trình đối lưu cưỡng bức............ 28
2.1.8.1 Bộ thu hoạt động theo chu trình đối lưu tự nhiên........................ 28
2.1.8.2 Bộ thu hoạt động theo chu trình đối lưu cưỡng bức.................... 28
2.1.9 Thiết bị giữ nhiệt................................................................................. 29
2.2 Tính toán nhiệt hấp thụ và tổn thất................................................... 29
2.2.1 Nhiệt hấp thụ........................................................................................ 29
2.2.2 Nhiệt tổn thất....................................................................................... 31
CHƯƠNG 3: TÍNH TOÁN NĂNG LƯỢNG BỨC XẠ MẶT TRỜI.......... 34
3.1 Giới thiệu............................................................................................... 34
3.2 Tính toán góc tới của bức xạ trực xạ.................................................. 34
3.3 Một số phương pháp điều khiển tấm thu theo hướng mặt trời....... 35
3.4 Định hướng dàn pin mặt trời............................................................... 39
3.5 Kỹ thuật điều khiển hướng sáng mới................................................. 40
CHƯƠNG 4 : TÌM HIỂU ĐỘNG CƠ BƯỚC VÀ CÁC CÁCH ĐIỀU KHIỂN 42
4.1 Giới thiệu............................................................................................... 42
4.2 Các loại động cơ bước.......................................................................... 43
4.2.1 Động cơ thay đổi từ trở ( Variable reductance motor).................... 43
4.2.2 Động cơ bước dùng nam châm vĩnh cửu (permanent magnet motor PM) 43
4.2.3 Động cơ bước kết hợp hai loại trên (hybrid).................................... 44
4.3 Dây cuốn động cơ................................................................................. 44
4.3.2 Lưỡng cực.............................................................................................. 45
4.4 Chế độ bước........................................................................................... 45
4.4.1 Toàn bước.............................................................................................. 45
4.4.2 Bán bước................................................................................................ 46
4.4.3 Vi bước................................................................................................... 47
4.5 Ma sát và vùng chết.............................................................................. 48
4.6 Tìm hiểu các mạch điều khiển động cơ bước................................... 49
4.6.1 Độ tự cảm............................................................................................... 53
4.6.2 Kết nối song song và nối tiếp............................................................. 53
4.6.3 Điện áp lái............................................................................................. 53
4.6.4 Tính chất nhấp nhô của động cơ........................................................ 53
4.6.5 Sự chịu nhiệt của động cơ................................................................... 53
CHƯƠNG 5 : VI ĐIỀU KHIỂN HỌ MSC-51.............................................. 54
5.2 Sơ đồ khối của AT89C51.................................................................... 55
5.3 Khảo sát sơ đồ chân 8951................................................................... 55
5.3.1 Sơ đồ chân 8951................................................................................... 55
5.3.2 Chức năng các chân của 8951............................................................ 56
5.4 Cấu trúc bên trong vi điều khiển........................................................ 57
5.4.1 Tổ chức bộ nhớ..................................................................................... 57
5.4.2 Các thanh ghi có chức năng đặc biệt................................................. 59
5.4.3 Các thanh ghi có chức năng đặc biệt................................................. 60
54.4 Hoạt động Res....................................................................................... 62
CHƯƠNG 6: THIẾT KẾ MẠCH..................................................................... 64
6.1 Module MCU giao tiếp với Dallas..................................................... 64
6.1.1 Giới thiệu IC thời gian thực Dallas DS12C887................................ 64
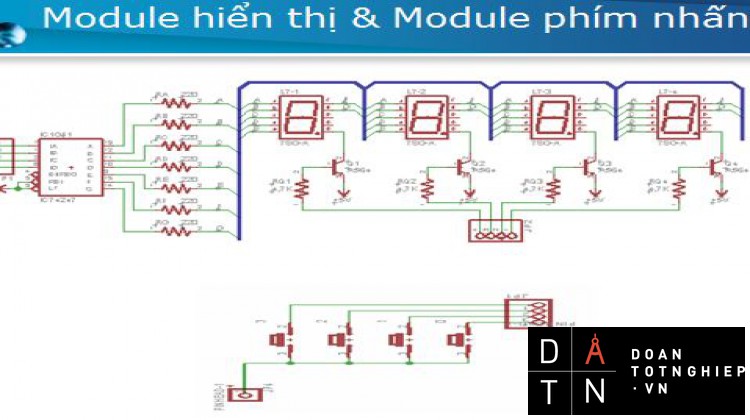
6.2 Module hiển thị..................................................................................... 68
6.3 Module phím nhấn............................................................................... 68
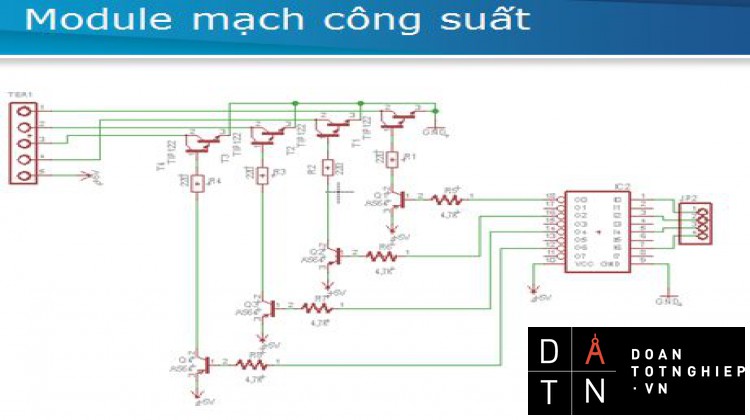
6.4 Module mạch công suất....................................................................... 68
6.5 Giải thuật trên vi điều khiển............................................................... 69
6.5.1 Giải thuật tổng quát.............................................................................. 69
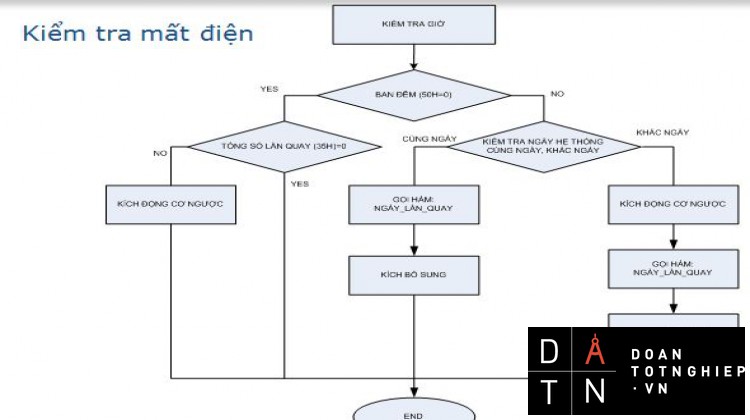
6.5.2 Chương trình kiểm tra mất điện.......................................................... 71
6.5.3 Chương trình kích động cơ.................................................................. 72
6.5.4 Chương trình kiểm tra giờ................................................................... 73
6.5.5 Chương trình Ngày_lần_quay........................................................... 74
6.5.6 Chương trình kiểm tra kích động cơ.................................................. 75
6.5.7 Chương trình kích bổ sung.................................................................. 76
PHẦN C: MÔ HÌNH VÀ KẾT QUẢ THÍ NGHIỆM.................................... 77
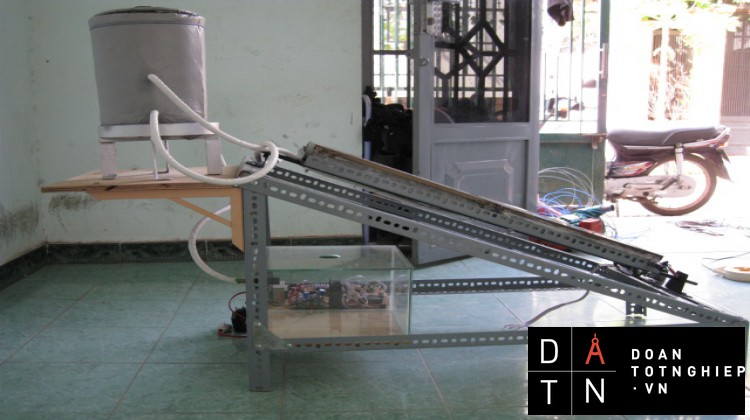
Mô hình........................................................................................................... 78
Mô hình thực tế.............................................................................................. 80
Kết quả thí nghiệm......................................................................................... 81
Tài liệu tham khảo......................................................................................... 88
PHỤ LỤC............................................................................................................... 90
DANH MỤC HÌNH VẼ
- Pin mặt trời ................................................................................................. 6
- Nhà máy nhiệt điện mặt trời .................................................................... 7
- Thiết bị sấy dùng năng lượng mặt trời .................................................... 8
- Triển khai bếp nấu cơm dùng NLMT ..................................................... 8
- Thiết bị chưng cất nước dùng NLMT ..................................................... 9
- Bơm nước chạy bằng NLMT .................................................................... 9
- Động cơ stirling chạy bằng ..................................................................... 9
- Hệ thống cung cấp nước nống dùng NLMT ........................................... 10
- Tủ lạnh dùng năng lượng mặt trời ........................................................... 10
- Bề mặt hấp thụ nhiệt dạng ống hình rắn gắn trên tấm hấp thụ ........... 11
- Dải tấm hấp thụ được đan xen vào bề mặt hấp thụ dạng dãy ống ...... 12
- Bề mặt hấp thụ dạng tâm phẳng .............................................................. 12
- Cấu tạo loại module bộ thu đặt nằm ngang Module ............................ 13
- Sơ đồ nhà máy diện mặt trời dùng gương phản xạ ............................... 14
- Gương nón với mặt thu hình ống trụ ...................................................... 15
- Ảnh của mặt trời qua gương parabol ...................................................... 15
- Máy nước nóng dùng tấm thu dạng ống thuy tinh ................................ 16
- ống thu dạng ống thủ tinh ........................................................................ 16
- Nguyên lý hoạt động ống thu dạng ống thủ tinh ................................... 16
- Diện tích tấm thu nhiệt được sử dụng trên thế giới trong giai đoạn
(1999-2000) ............................................................................................... 17
- Bảng giá thành chi phí cho một bộ thu nước nóng sử dụng năng luợng mặt trời 18
- Mặt cắt của một Lò hơi ống lửa (Light Rail Transit Association) ...... 18
- Lò hơi ống nước (Water Tube Boiler) .................................................... 19
- Lò hơi trọn bộ đốt dầu cấp 3 điển ........................................................... 19
- Sơ đồ hộp thu năng lượng mặt trời sử dụng hiệu ứng nhà kính ................ 22
- Quá trình truyền của tia bức xạ ..................................................................... 23
- Quá trình truyền của tia bức xạ qua lớp phủ không hấp thụ .................... 23
- Góc tới hiệu quả của tán xạ đẳng hướng và bức xạ phản xạ từ mặt đất trên mặt phẳng nghiêng 25
- Xác định T và t(τ) ....................................................................................... 26
- Quá trình hấp thụ bức xạ mặt trời của bộ thu kiểu lồng kính .............. 27
- Sơ đồ bộ thu sản xuất nước nóng (a) và hệ ống kim loại dưới tấm
hấp thụ (b)..................................................................................................... 28
- Hệ thống bộ thu hoạt động theo chu trình đối lưu tự nhiên ................. 29
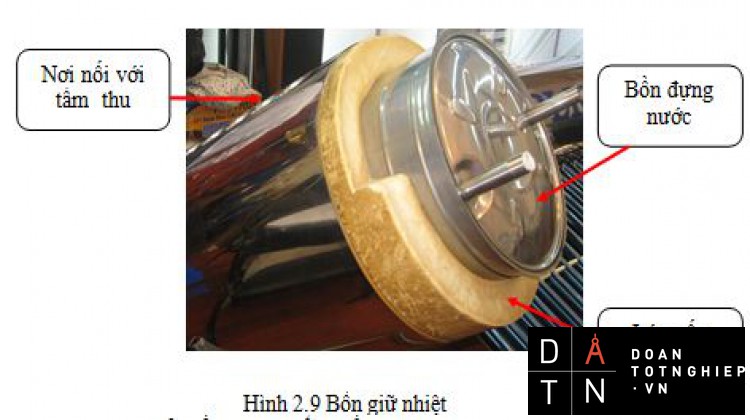
- Bồn giữ nhiệt .............................................................................................. 29
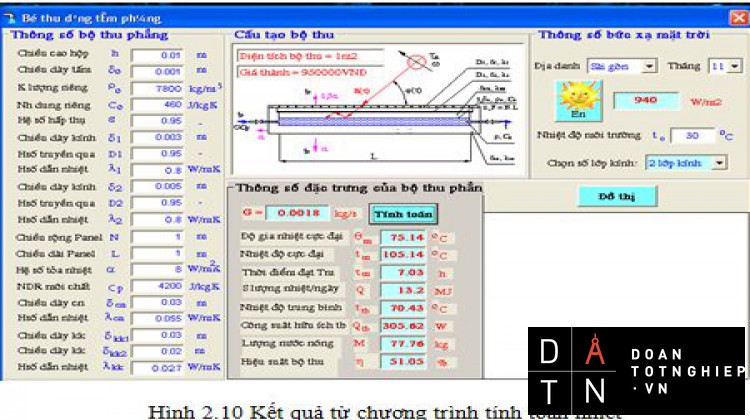
- Kết quả từ chương trình tính toán nhiệt .................................................. 31
- Xác định hao phi nhiệt lên phía trên U ................................................... 32
- Các hao phí nhiệt xuống dưới và ra xung quanh ................................... 33
- Quan hệ các góc hình học của tia bức xạ mặt trời trên mặt phẳng nghiêng 34
- Sơ đồ nguyên lý mạch điều khiển dạng chủ động ................................. 37
- Các tấm pin mặt trời sử dụng bộ điều khiển của hãng TRAXLE.......... 37
- Sơ đồ điều khiển năng lượng mặt trời dùng board tích hợp FPG......... 38
- Mô hình điều khiển tấm pin theo hai trục .............................................. 38
- Các quỹ đạo mặt trời trong năm ............................................................... 39
- Định hướng dàn pin mặt trời ..................................................................... 40
- Nguyên lí kĩ thuật điều khiển mới ........................................................... 41
- Hệ thống động cơ bước ............................................................................. 42
- Động cơ biến từ trở.................................................................................... 43
- Động cơ bước dùng nam châm vĩnh cửu ................................................ 43
- Động cơ bước loại hybrid ........................................................................ 44
- Dây quấn đơn cực ..................................................................................... 44
- Dây quấn lưỡng cực................................................................................... 45
- Moment ở chế độ toàn bước..................................................................... 45
- moment ở chế độ bán bước ...................................................................... 46
- Moment ở chế độ vi bước ........................................................................ 47
- Moment và ma sát ..................................................................................... 48
- Moment khi có ma sát .............................................................................. 48
- Mạch điều khiển dùng opto ..................................................................... 49
- IC lái ULN 2003 và UCN 5804 .............................................................. 50
- Mạch điều khiển động bước dùng L297 và L298 ................................. 50
- Sơ đồ chân SLA7024M và SLA7026M .................................................. 51
- Cấu tạo bên trong của SLA7026 ............................................................. 52
- Sơ đồ điều khiển động cơ bước dùng SLA702X ................................... 53
- Sơ đồ khối của vi điều khiển .................................................................... 55
- Sơ đồ chân 8951 ......................................................................................... 55
- Chức năng các chân port 3 ........................................................................ 56
- Bảng tóm tắt các vùng nhớ 8951 .............................................................. 58
- Trạng thái chương trình D0H .................................................................... 60
- Chọn Bank theo RS1, RS2 ........................................................................ 61
- Reset bằng nút nhấn ................................................................................... 63
- Trạng thái các thanh ghi sau reset ........................................................... 63
- Vi điều khiển và dallas .................................................................................... 64
- Dallas DS12C887 ....................................................................................... 64
- Chức năng các chân DS12C887 ............................................................... 65
- Các dãi tần số ngõ ra SQW ....................................................................... 66
- Module hiển thị .......................................................................................... 68
- Module phím nhấn ..................................................................................... 68
- Module công suất ....................................................................................... 68
- Bố trí cuộn dây stato................................................................................... 69
- Chuỗi xung 4 bước thông thường ............................................................. 69
- Sơ đồ giải thuật tổng quát trên vi điều khiển ......................................... 70
- Sơ đồ tổng quát chương trình kiểm tra mất điện .................................... 71
- Sơ đồ kích động cơ bước .......................................................................... 72
- Sơ đồ giải thuật kiểm tra giờ ..................................................................... 73
- Sơ đồ giải thuật đọc lần quay trong ngày ............................................... 74
- Sơ đồ giải thuật chương trình kiểm tra kích động cơ ............................ 75
- Sơ đồ giải thuật chương trình kích bổ sung ............................................ 76
I Mô hình ............................................................................................................. 78
II Mô hình thực tế ................................................................................................ 80
III Bản vẽ chi tiết .................................................................................................. 82
IV Kết quả thí nghiệm khi có bộ điều khiển hướng sáng................................ 85
V Kết quả thí nghiệm khi không có bộ điều khiển hướng sáng .................... 92
DANH MỤC BẢNG BIỂU
IV. Kết quả thí nghiệm khi có bộ điều khiển hướng sáng.............................. 86
Ngày thứ 1: ( ngày 04/ 02/ 2012 )................................................................ 86
Ngày thứ 2: ( ngày 05/ 02/ 2012 )................................................................ 87
Ngày thứ 3: ( ngày 06/ 02/ 2012 )................................................................ 88
Ngày thứ 4: ( ngày 07/ 02/ 2012 )................................................................ 89
Ngày thứ 5: ( ngày 08/ 02/ 2012 )................................................................ 87
Bảng kết quả 5 ngày thí nghiệm và nhiệt độ trung bình khi có bộ điều
khiển hướng sáng........................................................................................... 91
V. Kết quả thí nghiệm khi không có bộ điều khiển hướng sáng .................. 93
Ngày thứ 1: ( ngày 20/ 02/ 2012)................................................................. 93
Ngày thứ 2: ( ngày 21/ 02/ 2012)................................................................. 94
Ngày thứ 3: ( ngày 22/ 02/ 2012)................................................................. 95
Ngày thứ 4: ( ngày 23/ 02/ 2012)................................................................. 96
Ngày thứ 5: ( ngày 24/ 02/ 2012)................................................................. 97
Bảng kết quả 5 ngày thí nghiệm và nhiệt độ trung bình khi không có bộ điều khiển hướng sáng 98
Nhiệt độ trung bình giữa hai kết quả thí nghiệm lúc có và không có
bộ điều khiển hướng sáng............................................................................ 100
Thế giới sắp cạn năng lượng hóa thạch : Thời của năng lượng mới?
Năng lượng truyền thống, rẻ hay không rẻ?
Năng lượng tự nhiên, mà đại diện của nó là dầu mỏ, than đá… hiện nay được đánh giá là rẻ hơn các loại năng lượng tái tạo. Phần lớn các nhà đầu tư, các doanh nghiệp đều cho rằng suất đầu tư và và giá điện sản xuất từ gió và mặt trời khá cao, khó cạnh tranh với điện truyền thống (nhiệt điện và thủy điện) hiện nay. Suất đầu tư cho nhà máy điện từ than xấp xỉ 1 triệu USD/MW trong khi điện gió cao gấp 1,2-1,7 lần, điện nguyên tử cao gấp 3-3,5 lần so với nhiệt điện. Ngoài ra, giá thành của điện gió, điện mặt trời cũng đều cao hơn so với thủy điện, nhiệt điện…
Tuy nhiên, dưới cái nhìn của môi trường bền vững, một số nhà kinh tế cho rằng khi so sánh các loại năng lượng này, nhiều người đã “bỏ quên” nhiều yếu tố chi phí chưa được tính đủ như: sản xuất điện từ than gây ô nhiễm lớn ảnh hưởng đến sức khỏe và mất nhiều kinh phí để khắc phục ô nhiễm (1 nhà máy điện từ than công suất 1.000 MW, mỗi năm phải thải 6 triệu tấn CO2, 44 ngàn tấn SO2, 22 ngàn tấn NOx và nửa triệu tấn thải rắn). Trong khi đó, khi sử dụng năng lượng sạch tái tạo được sẽ giảm khí nhà kính. Chúng ta có thể “bán môi trường sinh thái” thu về nhiều triệu USD, giảm bớt sự chênh lệch chi phí giữa hai loại năng lượng.
Tuy nhiên, cách tính này ít được áp dụng vào thực tế, vì nhiều quốc gia trên thế giới không tính các loại phí “môi trường” vào sản xuất năng lượng. Theo một số chuyên gia, thực tế giá thành sản xuất than và điện hiện nay cao hơn giá bán, nếu tính đủ các chi phí ngành điện không thể thu hồi được vốn để tái đầu tư nên vẫn cần Nhà nước bao cấp để bảo đảm điện năng cho tiêu dùng xã hội. Hiện nay, ngành năng lượng được ưu đãi lớn, chỉ phải nộp thuế môi trường, hạch toán môi trường vào giá thành. Một số chuyên gia cho rằng, nếu tính đủ thuế sử dụng tài nguyên, thuế môi trường, tính đủ các yếu tố chi phí hạch toán vào giá thành, cắt bỏ các ưu đãi bao cấp của Nhà nước trong hạch toán kinh doanh thì ngay cả các năng lượng truyền thống như nhiệt điện, thủy điện chưa chắc đã rẻ hơn việc phát triển năng lượng tái tạo, năng lượng mới.
Bài toán an ninh năng lượng
Một cái nhìn xa hơn, các nhà nghiên cứu cho rằng năng lượng tái tạo đóng một vai trò quan trọng trong bài toán an ninh năng lượng của mỗi quốc gia. Theo một báo cáo của Bộ Công nghiệp (nay là Bộ Công thương), vào tháng 8 năm nay, nguồn năng lượng của Việt Nam hiện đang cạn kiệt dần. Than chỉ còn 3,88 tỷ tấn; dầu còn 2,3 tỷ tấn… Ước tính, nguồn năng lượng tự nhiên hiện nay của chúng ta sẽ cạn kiệt trong thời gian tới, trong đó dự báo nguồn dầu mỏ thương mại trên thế giới còn dùng khoảng 60 năm, khí tự nhiên 80 năm, than 150-200 năm. Tại Việt Nam, các nguồn năng lượng tự nhiên này có thể còn hết trước thế giới một vài chục năm. An ninh năng lượng trở thành vấn đề cấp bách. Vấn đề dầu mỏ hiện nay là một ví dụ. Các mỏ dầu tập trung chủ yếu ở các vùng mà tình hình chính trị luôn bất ổn và mỗi cơn khủng hoảng dầu mỏ diễn ra, tình hình kinh tế thế giới lại lung lay…
Trong bối cảnh đó, các chuyên gia kinh tế năng lượng đã dự báo đến trước năm 2020, Việt Nam sẽ phải nhập khoảng 12%-20% năng lượng, đến năm 2050 lên đến 50%-60%, chưa kể điện hạt nhân. Tình hình năng lượng hiện nay của chúng ta, trong lĩnh vực điện năng chủ yếu dựa vào nhiệt điện và thủy điện. Thủy điện tuy có tiềm năng phát triển nhưng lại phụ thuộc vào thời tiết, nếu phát triển quá lớn chưa thể lường trước những biến đổi về dòng chảy tác động tiêu cực đến môi trường sinh thái. Điện hạt nhân còn đang trong quá trình chuẩn bị phương án…
Về xăng dầu, hiện nay chúng ta vẫn phải nhập khẩu, dự tính khi nhà máy lọc dầu Dung Quất đưa vào sử dụng năm 2009-2010, mới chỉ cung cấp được khoảng trên 5 triệu tấn xăng dầu cho giao thông vận tải trong tổng số nhu cầu 15-17 triệu tấn, vẫn phải nhập trên 10 triệu tấn. Đến năm 2020, khi đưa tiếp 2 nhà máy lọc dầu vào hoạt động chúng ta có chừng 15-16 triệu tấn xăng dầu trong tổng nhu cầu 30-35 triệu tấn. Vẫn phải nhập ít nhất 15 triệu tấn! Rõ ràng, hiện nay chúng ta chưa tự chủ được nhiều trong vấn đề năng lượng. Trong khi đó, những tác động của thiếu điện hay tăng giá xăng đều ảnh hưởng xấu lập tức đến nền kinh tế.
Hiện nay nhiều nước trên thế giới và các nước ASEAN cũng đang hành động để tăng cường an ninh năng lượng. Và lời giải cho bài toán, đó cũng là các năng lượng tái tạo và tìm ra nguồn năng lượng mới. Điều đó có thể xóa đi hàng loạt cuộc chiến tranh dầu mỏ, hay những cuộc khủng hoảng dầu mỏ… Bên cạnh yếu tố giá thành năng lượng, đây lại là một đóng góp rất đáng quan tâm của những nguồn năng lượng mới
Kết luận
Như vậy, năng lượng mặt trời là một nguồn năng lượng mới hết sức quan trọng, là một xu hướng mới về năng lượng sẽ phát triển rất mạnh mẽ trọng tương lai gần. Do đó nhóm đã chọn đề tài về nguồn năng lượng mới này, đó là:
NGHIÊN CỨU - TÍNH TOÁN – THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH TRUYỀN NHIỆT VÀ GIỮ NHIỆT DẠNG TẤM PHẲNG CHO THIẾT BỊ LÒ HƠI DÙNG NĂNG LƯỢNG MẶT TRỜI
Phần B
CHƯƠNG 1: TỔNG QUAN VỀ NĂNG LƯỢNG MẶT TRỜI
1.1 Khái niệm về năng lượng mặt trời
Năng lượng Mặt Trời là năng lượng của dòng bức xạ điện từ xuất phát từ Mặt Trời, cộng với một phần nhỏ năng lượng của các hạt hạ nguyên tử khác phóng ra từ ngôi sao này. Dòng năng lượng này sẽ tiếp tục phát ra cho đến khi phản ứng hạt nhân trên Mặt Trời hết nhiên liệu, vào khoảng 5 tỷ năm nữa.
Năng lượng bức xạ điện từ của Mặt Trời tập trung tại vùng quang phổ nhìn thấy. Mỗi giây trôi qua, Mặt Trời giải phóng ra không gian xung quanh 3,827×1026 Joule. Năng lượng Mặt Trời là một nguồn năng lượng quan trọng điều khiển các quá trình khí tượng học và duy trì sự sống trên Trái Đất. Ngay ngoài khí quyển Trái Đất, cứ mỗi một mét vuông diện tích vuông góc với ánh nắng Mặt Trời, chúng ta thu được dòng năng lượng khoảng 1.400 Joule trong một giây.
Đối với cuộc sống của loài người, năng lượng Mặt Trời là một nguồn năng lượng tái tạo quý báu.Có thể trực tiếp thu lấy năng lượng này thông qua hiệu ứng quang điện, chuyển năng lượng các photon của Mặt Trời thành điện năng, như trong pin Mặt Trời. Năng lượng của các photon cũng có thể được hấp thụ để làm nóng các vật thể, tức là chuyển thành nhiệt năng, sử dụng cho bình đun nước Mặt Trời, hoặc làm sôi nước trong các máy nhiệt điện của tháp Mặt Trời, hoặc vận động các hệ thống nhiệt như máy điều hòa Mặt Trời.
Năng lượng của các photon có thể được hấp thụ và chuyển hóa thành năng lượng trong các liên kết hóa học của các phản ứng quang hóa.Một phản ứng quang hóa tự nhiên là quá trình quang hợp. Quá trình này được cho là đã từng dự trữ năng lượng Mặt Trời vào các nguồn nhiên liệu hóa thạch không tái sinh mà các nền công nghiệp của thế kỷ 19 đến 21 đã và đang tận dụng. Nó cũng là quá trình cung cấp năng lượng cho mọi hoạt động sinh học tự nhiên, cho sức kéo gia súc và củi đốt, những nguồn năng lượng sinh học tái tạo truyền thống. Trong tương lai, quá trình này có thể giúp tạo ra nguồn năng lượng tái tạo ở nhiên liệu sinh học, như các nhiên liệu lỏng (diesel sinh học, nhiên liệu từ dầu thực vật), khí (khí đốt sinh học) hay rắn.
Năng lượng Mặt Trời cũng được hấp thụ bởi thủy quyển Trái Đất và khí quyển Trái Đất để sinh ra các hiện tượng khí tượng học chứa các dạng dự trữ năng lượng có thể khai thác được. Trái Đất, trong mô hình năng lượng này, gần giống bình đun nước của những động cơ nhiệt đầu tiên, chuyển hóa nhiệt năng hấp thụ từ photon của Mặt Trời, thành động năng của các dòng chảy của nước, hơi nước và không khí, và thay đổi tính chất hóa học và vật lý của các dòng chảy này.
1.2 Thiết bị sử dụng năng lượng mặt trời:
Năng lượng mặt trời là nguồn năng lượng mà con người biết sử dụng từ rất sớm, nhưng ứng dụng NLMT vào các công nghệ sản xuất và trên quy mô rộng thì mới chỉ thực sự vào cuối thế kỷ 18 và cũng chủ yếu ở những nước nhiều năng lượng mặt trời, những vùng sa mạc. Từ sau các cuộc khủng hoảng năng lượng thế giới năm 1968 và 1973, NLMT càng được đặc biệt quan tâm. Các nước công nghiệp phát triển đã đi tiên phong trong việc nghiên cứu ứng dụng NLMT. Các ứng dụng NLMT phổ biến hiện nay bao gồm các lĩnh vực chủ yếu sau
1.2.1 Pin mặt trời:
Hinh 1.1 Pin mặt trời
Pin mặt trời là phương pháp sản xuất điện trực tiếp từ NLMT qua thiết bị biến đổi quang điện. Pin mặt trời có ưu điểm là gọn nhẹ có thể lắp bất kỳ ở đâu có ánh sáng mặt trời, đặc biệt là trong lĩnh vực tàu vũ trụ. Ứng dụng NLMT dưới dạng này được phát triển với tốc độ rất nhanh, nhất là ở các nước phát triển. Ngày nay con người đã ứng dụng pin NLMT để chạy xe thay thế dần nguồn năng lượng truyền thống.
Tuy nhiên giá thành thiết bị pin mặt trời còn khá cao, trung bình hiện nay khoảng 5USD/WP, nên ở những nước đang phát triển pin mặt trời hiện mới chỉ có khả năng duy nhất là cung cấp năng lượng điện sử dụng cho các vùng sâu, xa nơi mà đường điện quốc gia chưa có.
Ở Việt Nam, với sự hỗ trợ của một số tổ chức quốc tế đã thực hiện thành công việc xây dựng các trạm pin mặt trời có công suất khác nhau phục vụ nhu cầu sinh hoạt và văn hoá của các địa phương vùng sâu, vùng xa, nhất là đồng bằng sông Cửu Long và Tây Nguyên. Tuy nhiên hiện nay pin mặt trời vẫn đang còn là món hàng xa xỉ đối với các nước nghèo như chúng ta.
1.2.2 Nhà máy nhiệt sử dụng năng lượng mặt trời:
Điện năng còn có thể tạo ra từ NLMT dựa trên nguyên tắc tạo nhiệt độ cao bằng một hệ thống gương phản chiếu và hội tụ để gia nhiệt cho môi chất làm việc truyền động cho máy phát điện.
Hiện nay trong các nhà máy nhiệt điện sử dụng NLMT có các loại hệ thống bộ thu chủ yếu sau đây:
Hệ thống dùng parabol trụ để tập trung tia bức xạ mặt trời vào một ống môi chất đặt dọc theo đường hội tụ của bộ thu, nhiệt độ có thể đạt tới 400o C.
Hệ thống nhận nhiệt trung tâm bằng cách sử dụng các gương phản xạ có định vị theo phương mặt trời để tập trung NLMT đến bộ thu đặt trên đỉnh tháp cao, nhiệt độ có thể đạt tới trên 1500o C.
Hình 1.2 Nhà máy nhiệt điện mặt trời
Hệ thống sử dụng gương parabol tròn xoay định vị theo phương mặt trời để tập trung NLMT vào một bộ thu đặt ở tiêu điểm của gương, nhiệt độ có thể đạt trên 1500oC.
Hiện nay người ta còn dùng năng lượng mặt trời để phát điện theo kiểu “ tháp năng lượng mặt trời - Solar power tower “. Australia đang tiến hành dự án xây dựng một tháp năng lượng mặt trời cao 1km với 32 tuốc bin khí có tổng công suất 200 MW. Dự tính rằng đến năm 2006 tháp năng lượng mặt trời này sẽ cung cấp điện mỗi năm 650GWh cho 200.000 hộ gia đình ở miền tây nam New South Wales - Australia, và sẽ giảm được 700.000 tấn khí gây hiệu ứng nhà kính trong mỗi năm.
1.2.3 Thiết bị sấy khô dùng năng lượng mặt trời
Hiện nay NLMT được ứng dụng khá phổ biến trong lĩnh nông nghiệp để sấy các sản phẩm như ngũ cốc, thực phẩm ... nhằm giảm tỷ lệ hao hụt và tăng chất lượng sản phẩm. Ngoài mục đích để sấy các loại nông sản, NLMT còn được dùng để sấy các loại vật liệu như gỗ.
Hình 1.3 Thiết bị sấy dùng năng lượng mặt trời
1.2.4 Bếp nấu dùng năng lượng mặt trời:
Hình 1.4 Triển khai bếp nấu cơm dùng NLMT
Ở Việt Nam việc bếp năng lượng mặt trời cũng đã được sử dụng khá phổ biến. Năm 2000, Trung tâm Nghiên cứu thiết bị áp lực và năng lượng mới - Đại học Đà Nẵng đã phối hợp với các tổ chức từ thiện Hà Lan triển khai dự án (30 000 USD) đưa bếp năng lượng mặt trời - bếp tiện lợi (BTL) vào sử dụng ở các vùng nông thôn của tỉnh Quảng Nam, Quảng Ngãi, dự án đã phát triển rất tốt và ngày càng đựơc đông đảo nhân dân ủng hộ. Trong năm 2002, Trung tâm dự kiến sẽ đưa 750 BTL vào sử dụng ở các xã huyện Núi Thành và triển khai ứng dụng ở các khu ngư dân ven biển để họ có thể nấu nước, cơm và thức ăn khi ra khơi bằng NLMT.
1.2.5 Thiết bị chưng cất nước dùng năng lượng mặt trời:
Thiết bị chưng cất nước thường có 2 loại: loại nắp kính phẳng có chi phí cao (khoảng 23 USD/m2), tuổi thọ khoảng 30 năm, và loại nắp plastic có chi phí rẻ hơn nhưng hiệu quả chưng cất kém hơn.
Ở Việt Nam đã có đề tài nghiên cứu triển khai ứng dụng thiết bị chưng cất nước NLMT dùng để chưng cất nước ngọt từ nước biển và cung cấp nước sạch dùng cho sinh hoạt ở những vùng có nguồn nước ô nhiễm với thiết bị chưng cất nước NLMT có gương phản xạ đạt được hiệu suất cao tại khoa Công nghệ Nhiệt Điện lạnh-Trường Đại học Bách khoa Đà Nẵng.
Hình 1.5 Thiết bị chưng cất nước dùng NLMT
1.2.6 Động cơ stirling chạy bằng năng lượng mặt trời:
Ứng dụng NLMT để chạy các động cơ nhiệt - động cơ Stirling ngày càng được nghiên cứu và ứng dụng rộng rãi dùng để bơm nước sinh hoạt hay tưới cây ở các nông trại. Ở Việt Nam động cơ Stirling chạy bằng NLMT cũng đã được nghiên cứu chế tạo để triển khai ứng dụng vào thực tế. Như động cơ Stirling, bơm nước dùng năng lượng mặt trời.
Hình 1.6 Bơm nước chạy bằng NLMT Hình 1.7 Động cơ stirling chạy bằng NLMT
1.2.7 Thiết bị đun nước nống dùng năng lượng mặt trời:
Ứng dụng đơn giản, phổ biến và hiệu quả nhất hiện nay của NLMT là dùng để đun nước nóng. Các hệ thống nước nóng dùng NLMT đã được dùng rộng rãi ở nhiều nước trên thế giới.
Hình 1.8 Hệ thống cung cấp nước nống dùng NLMT
Ở Việt Nam hệ thống cung cấp nước nóng bằng NLMT đã và đang được ứng dụng rộng rãi ở Hà Nội, Thành phố HCM và Đà Nẵng . Các hệ thống này đã tiết kiệm cho người sử dụng một lượng đáng kể về năng lượng, góp phần rất lớn trong việc thực hiện chương trình tiết kiệm năng lượng của nước ta và bảo vệ môi trường chung của nhân loại.
1.2.8 Thiết bi làm lạnh và điều hòa không khí dùng năng lượng mặt trời:
Trong số những ứng dụng của NLMT thì làm lạnh và điều hoà không khí là ứng dụng hấp dẫn nhất vì nơi nào khí hậu nóng nhất thì nơi đó có nhu cầu về làm lạnh lớn nhất, đặc biệt là ở những vùng xa xôi héo lánh thuộc các nước đang phát triển không có lưới điện quốc gia và giá nhiên liệu quá đắt so với thu nhập trung bình của người
Hình 1.9 Tủ lạnh dùng năng lượng mặt trời
dân. Với các máy lạnh làm việc trên nguyên lý biến đổi NLMT thành điện năng nhờ pin mặt trời (photovoltaic) là thuận tiện nhất, nhưng trong giai đoạn hiện nay giá thành pin mặt trời còn quá cao. Ngoài ra các hệ thống lạnh còn được sử dụng NLMT dưới dạng nhiệt năng để chạy máy lạnh hấp thụ, loại thiết bị này ngày càng được ứng dụng nhiều trong thực tế, tuy nhiên hiện nay các hệ thống này vẫn chưa được thương mại hóa và sử dụng rộng rãi vì giá thành còn rất cao và hơn nữa các bộ thu dùng trong các hệ thống này chủ yếu là bộ thu phẳng với hiệu suất còn thấp (dưới 45%) nên diện tích lắp đặt bộ thu cần rất lớn chưa phù hợp với yêu cầu thực tế. Ở Việt Nam cũng đã có một số nhà khoa học nghiên cứu tối ưu hoá bộ thu năng lượng mặt trời kiểu hộp phẳng mỏng cố định có gương phản xạ để ứng dụng trong kỹ thuật lạnh, với loại bộ thu này có thể tạo được nhiệt độ cao để cấp nhiệt cho máy lạnh hấp thụ, nhưng diện tích mặt bằng cần lắp đặt hệ thống cần phải rộng.
1.3 Các loại bộ thu:
1.3.1 Bộ thu phẳng:
Không thể có một kiểu Collector nào mà hoàn hảo về mọi mặt và thích hợp cho mọi điều kiện, tuy nhiên tùy theo từng điều kiện cụ thể chúng ta có thể tạo cho mình một loại Collector hợp lý nhất. Trong các bộ phận cấu tạo nên Colletor, bộ phận quan trọng nhất và có ảnh hưởng lớn đến hiệu qủa sử dụng của Collector là bề mặt hấp thụ nhiệt. Sau đây là một số so sánh cho việc thiết kế và chế tạo bề mặt hấp thụ nhiệt của Collector mà thỏa mãn một số chỉ tiêu như: giá thành, hiệu quả hấp thụ và mức độ thuận tiện trong việc chế tạo.
Sau đây là 3 mẫu Collector có bề mặt hấp thụ nhiệt đơn giản, hiệu quả hấp thụ cao có thể chế tạo dễ dàng ở điều kiện Việt nam.
Hình 1.12 Bề mặt hấp thụ dạng tâm phẳng
Sau khi thiết kế chế tạo, đo đạc tính tóan và kiểm tra so sánh ta thu được bảng tổng kết sau
|
Loại bề mặthấp thụ |
Dạng ống hình rắn |
Dạng dãy ống |
Dạng dãy ống |
Dạng tấm |
|
Cách gắn với tấm hấp thụ |
Đan xen vào nhau |
Dùng vòng dây kim loại |
Đan xenvào nhau |
Hàn đính |
|
Hiệu suất hấp thụ nhiệt |
Giảm 10% |
Giảm 10% |
Chuẩn |
Bằng chuẩn |
|
Giá của vật liệu và năng lượng chế tạo |
Giãm 4% |
Tăng 2% |
Chuẩn |
Tăng 4% |
|
Thời gian cần gia công chế tạo |
Giãm 20% |
Giãm 10% |
Chuẩn |
Tăng 50% |
Từ các kết quả kiểm tra và so sánh ở trên ta có thể rút ra một số kết luận như sau:
1. Loại bề mặt hấp thụ dạng dãy ống có kết quả thích hợp nhất về hiệu suất hấp thụ nhiệt , giá thành cũng như công và năng lượng cần thiết cho việc chế tạo. Tuy nhiên nếu trong trường hợp không có điều kiện để chế tạo thì chúng ta có thể chọn loại bề mặt hấp thụ dạng hình rắn. Bề mặt hấp thụ dạng tấm cũng có kết quả tốt như loại dạng dãy ống nhưng đòi hỏi nhiều công và khó chế tạo hơn.
2. Tấm hấp thụ được gắn vào ống hấp thụ bằng cách đan xen từng dải nhỏ là có hiệu quả nhất. Ngoài ra tấm hấp thụ có thể gắn vào ống hấp thụ bằng phương pháp hàn, với phương pháp này thì hiệu quả hấp thụ cao hơn nhưng mất nhiều thời gian và giá thành cao hơn.
1.3.2 Bộ thu kiểu ống có gương phản xạ dạng parabol trụ
Hình 1.13 Cấu tạo loại module bộ thu đặt nằm ngang Module
Bộ thu nằm ngang có cấu tạo gồm một ống hấp thụ sơn màu đen có chất lỏng chuyển động bên trong, bên ngoài là hai ống thuỷ tinh lồng vào nhau, giữa hai ống thuỷ tinh là lớp không khí hoặc được hút chân không. Tất cả hệ ống hấp thụ và ống thuỷ tinh được đặt trên máng parabol trụ.
1.3.3 Các loại gương phản xạ:
Để tập trung năng lượng bức xạ chiếu tới mặt thu Ft, nhằm nâng cao nhiệt độ của Ft và môi chất tiếp xúc nó, người ta dùng thêm các gương phản xạ.
Gương phản xạ là các bề mặt nhẵn bóng, coi là vật đục D = 0, có hệ số hấp thụ A bé, và hệ số phản xạ R = (1-A) lớn. Gương phản xạ có thể có dạng phẳng, côn, nón, parabol trụ hoặc parabol tròn xoay. Gương phản xạ thường được chế tạo bằng mặt kim loại bóng như inox, nhôm, tôn đánh bóng, hoặc kính hay plastic có tráng bạc.
1.3.3.1 Gương phẳng
Hình 1.14 Sơ đồ nhà máy diện mặt trời dùng gương phản xạ
1.3.3.2 Gương nón:
Gương nón được dùng để phản xạ lên mặt thu hình ống trụ đặt tại trục nón. Tùy theo góc đỉnh nón nhỏ hơn, bằng hoặc lớn hơn 450, chiều cao H của ống thu bức xạ hình trụ có thể nhỏ hơn, bằng hoặc lớn hơn chiều cao h của nón
Hình 1.15 Gương nón với mặt thu hình ống trụ
1.3.3.4 Gương parapol: gồm hai loại parapol xoay và parapol trụ
Hình 1.16 Ảnh của mặt trời qua gương parabol
Khi quay trục gương theo hướng tia nắng, thì tại gần tiêu điểm F ta thu được ảnh của mặt trời, là một đĩa sáng tròn có đường kính d
1.3.3.5 Dạng ống thủy tinh chân không:
Hiện tại trên thị trường suất hiện thêm nhiều loại tấm thu, phổ biến là dạng ống thủy tinh với chi phí thấp và hiệu suất cao ngày càng được phổ biến trong thiết bị nước nóng hộ gia đình
Hình 1.17 Máy nước nóng dùng tấm thu dạng ống thuy tinh
Cấu tạo: là ống thủy tinh hai lớp được rút chân không và trong cùng là lớp đồng phủ một lớp sơn hấp thụ nhiệt
Hình 1.18 ống thu dạng ống thủ tinh
Hình 1.19 Nguyên lý hoạt động:
1.4 Tính kinh tế của các thiết bị sử dụng năng lượng mặt trời:
Thực tế trên thế giới đã chứng minh hiệu quả của các thiết bị sử dụng năng lượng mặt trời. Lượng thiết bị bán ra không ngừng tăng lên. Châu Âu là một trong những khu vực sử dụng nhiều năng lượng mặt trời nhất: theo thống kê thiết bị sử dụng nhiệt mặt trời tăng 18% trong một thập kỉ qua (1990-2000). Cuối năm 1999, đã có 8.5 triệu m2 tấm thu được lắp đặt, 75% trong số này là ở Hy Lạp, Đức, và Áo. Đến năm 2000 ước tính đã có 10 triệu m2 đã được lắp đặt. Giá của các thiết bị ngày càng rẻ, đối với các hệ thống sử dụng nước nóng mặt trời, chi phí đã giảm một nửa, từ 12.000 euro (1984) xuống còn 6000 euro (2002).
Hình 1.20 Diện tích tấm thu nhiệt được sử dụng trên thế giới
trong giai đoạn (1999-2000)
Chi phí của một hệ thống sử dụng nước nóng mặt trời trung bình (<6m2) được chia làm 3 phần: chi phí tấm thu, chi phí thiết bị giữ nhiệt, và công lắp đặt. Trung bình giá của mỗi thiết bị vào khoảng (3500-5000 euro), tính ra giá thành của mỗi kWh là 0.25euro (đây là các số liệu của năm 2000, thực tế ngày nay thiết bị nước nóng sử dụng năng lượng mặt trời đã giảm khá nhiều, giá trung bình ở Việt Nam khoảng dưới 1000 usd cho một hộ lắp đặt). Tuy nhiên giá thành thay đổi ở các nước khá nhau, ví dụ ở Đức giá chỉ khoảng 0.1-0.13euro/kWh.
Hình 1.21 Bảng giá thành chi phí cho một bộ thu nước nóng sử dụng năng luợng mặt trời
1.5 Một số loại lò hơi công nghiệp:
1.5.1 Lò hơi ống lửa (Fire Tub Boiler)
Với loại lò hơi này, khí nóng đi qua các ống và nước cấp cho lò hơi ở phía trên sẽ được chuyển thành hơi. Lò hơi ống lửa thường được sử dụng với công suất hơi tương đối thấp cho đến áp suất hơi trung bình. Do đó, sử dụng lò hơi dạng này là ưu thế với tỷ lệ hơi lên tới 12.000 kg/giờ và áp suất lên tớ18 kg/cm2. Các lò hơi này có thể sử dụng với dầu, ga hoặc các nhiên liệu lỏng. Vì các lý do kinh tế, các lò hơi ống lửa nằm trong hạng mục lắp đặt “trọn gói” (tức là nhà sản xuất sẽ lắp đặt) đối với tất cả các loại nhiên liệu.
Hình 1.22 Mặt cắt của một Lò hơi ống lửa
(Light Rail Transit Association)
1.5.2 Lò hơi ống nước (Water Tube Boiler)
Ở lò hơi ống nước, nước cấp qua các ống đi vào tang lò hơi. Nước được đun nóng bằng khí cháy và chuyển thành hơi ở khu vực đọng hơi trên tang lò hơi. Lò hơi dạng này được lựa chọn khi nhu cầu hơi cao đối với nhà máy phát điện.
Phần lớn các thiết kế lò hơi ống nước hiện đại có công suất nằm trong khoảng 4.500 – 120.000 kg/giờ hơi, ở áp suất rất cao. Rất nhiều lò hơi dạng này nằm trong hạng mục lắp đặt “trọn gói” nếu nhà máy sử dụng dầu và/hoặc ga làm nhiên liệu. Hiện cũng có loại thiết kế lò hơi ống nước sử dụng nhiên liệu rắn nhưng với loại này, thiết kế trọn gói không thông dụng bằng.
Hình 1.23 Lò hơi ống nước
Lò hơi ống nước có các đặc điểm sau:
- Sự thông gió cưỡng bức, cảm ứng, và cân bằng sẽ giúp nâng cao hiệu suất cháy.
- Yêu cầu chất lượng nước cao và cần phải có hệ thống xử lý nước.
- Phù hợp với công suất nhiệt cao
1.5.3 Lò hơi trọn bộ (Package Boiler)
Loại lò hơi này có tên gọi như vậy vì nó là một hệ thống trọn bộ. Khi được lắp đặt tại nhà máy, hệ thống này chỉ cần hơi, ống nước, cung cấp nhiên liệu và nối điện để có thể đi vào hoạt động. Lò hơi trọn bộ thường có dạng vỏ sò với các ống lửa được thiết kế sao cho đạt được tốc độ truyền nhiệt bức xạ và đối lưu cao nhất
Hình 1.24 Lò hơi trọn bộ đốt dầu cấp 3 điển
Lò hơi trọn bộ có những đặc điểm sau:
- Buồng đốt nhỏ, tốc độ truyền nhiệt cao dẫn đến quá trình hoá hơi nhanh hơn.
- Quá trình truyền nhiệt do đối lưu tốt hơn do được lắp một số lượng lớn các ống truyền nhiệt có đường kính nhỏ giúp truyền nhiệt đối lưu tốt.
- Hiệu suất cháy cao do có sử dụng hệ thống thông gió cưỡng bức.
- Quá trình truyền nhiệt tốt hơn nhờ số lần khí đi qua lò hơi.
- Hiệu suất nhiệt cao hơn so với các loại lò hơi khác.
Những lò hơi này được phân loại dựa trên số lần khí đốt nóng đi qua lò hơi. Buồng đốt sẽ là lần đi qua thức nhất, sau đó có thể là hai hoặc ba bộ ống lửa. Loại lò hơi phổ biến nhất của loại này là lò hơi bậc 3 (3 lần khí đi qua lò hơi) với hai bộ ống đốt và với khí thải đi qua bộ phận phía sau lò hơi.
1.5.4 Lò hơi buồng lửa tầng sôi (FBC):
Lò hơi buồng lửa tầng sôi (FBC) gần đây nổi lên như là một lựa chọn khả thi và có rất nhiều ưu điểm so với hệ thống đốt truyền thống, nó mang lại rất nhiều lợi ích-thiết kế lò hơi gọn nhẹ, nhiên liệu linh hoạt, hiệu suất cháy cao hơn và giảm thải các chất gây ô nhiễm độc hại như SOx và NOx. Nhiên liệu đốt của những lò hơi loại này gồm có than, vỏ trấu, bã mía, và các chất thải nông nghiệp khác. Lò hơi buồng lửa tầng sôi có các mức công suất rất khác nhau từ 0,5 T/h cho tới hơn100 T/h.
Khi không khí hoặc ga được phân bố đều, đi qua lớp hạt rắn minh, những hạt này sẽ không bị ảnh hưởng ở vận tốc thấp. Khi vận tốc không khí tăng dần, dẫn đến trạng thái các hạt đơn bị treo lơ lửng trong không khí này gọi là “tầng sôi”.
Khi vận tốc không khí tăng thêm sẽ tạo ra bong bóng, chuyển động mạnh, pha trộn nhanh và tạo ra bề mặt nhiên liệu đặc. Lớp vật liệu với những hạt rắn này được xem như là dung dịch đun sôi sẽ tạo ra lớp chất lỏng-“tầng sôi”.
Nếu các hạt cát ở trạng thái sôi được đun tới nhiệt độ than có thể bốc cháy, và than được cấp liên tục vào, khi đến lớp nhiên liệu, than sẽ bốc cháy tức thì, và lớp nhiên liệu đạt được nhiệt độ đồng đều. Quá trình đốt cháy tầng sôi (FBC) diễn ra ở mức nhiệt độ 840 oC đến 950oC. Vì nhiệt độ này thấp hơn nhiệt độ tan chảy của xỉ rất nhiều, nên có thể tránh được vấn đề xỉ nóng chảy và các vấn đề khác có liên quan.
Nhiệt độ cháy thấp hơn đạt được là do hệ số truyền nhiệt cao nhờ sự pha trộn nhanh ở tầng sôi và sự thoát nhiệt hiệu quả từ lớp nhiên liệu qua những ống truyền nhiệt trong lớp nhiên liệu và thành của tầng nhiên liệu. Vận tốc khí được duy trì ở giữa khoảng vận tốc sôi tối thiểu và vận tốc các hạt nhiên liệu bị cuốn theo. Điều này giúp đảm bảo sự vận hành ổn định của lớp nhiên liệu và tránh việc các hạt bị cuốn theo vào dòng khí.
1.5.5 Lò hơi buồng lửa tầng sôi không khí (AFBC):
Phần lớn các lò hơi vận hành dạng này là theo Quá trình Cháy tầng sôi không khí (AFBC).Quá trình này phức tạp hơn là bổ sung một buồng đốt tầng sôi vào lò hơi vỏ sò truyền thống. Những hệ thống như thế này được lắp đặt tương tự như lò hơi ống nước.
Than được đập theo cỡ 1 – 10 mm phụ thuộc vào loại than, loại nhiên liệu cấp cho buồng đốt.Không khí khí quyển, đóng vai trò là cả khí đốt và khí tầng sôi, được cấp vào ở một mức áp suất, sau khi được đun nóng sơ bộ bằng khí thải. Những ống trong tầng nhiên liệu mang nước đóng vai trò là thiết bị bay hơi. Những sản phẩm khí của quá trình đốt đi qua bộ phận quá nhiệt của lò hơi, qua bộ phận tiết kiệm, thiết bị thu hồi bụi và thiết bị đun nóng khí sơ bộ trước khi ra không khí.
1.5.6 Lò hơi buồng lửa tầng sôi điều áp (PFBC):
Ở loại lò hơi này, một máy nén khí sẽ cung cấp khí sơ cấp cưỡng bức (FD) và buồng đốt là một nồi áp suất. Tốc độ thoát nhiệt trong tầng sôi tỷ lệ với áp suất của tầng sôi và do dó, tầng sâu sẽ giúp thoát nhiệt nhiều. Nhờ vậy, hiệu suất cháy và sự hấp thụ S2 trong tầng nhiên liệu hơi được tạo ra trong hai ống, một nằm trong tầng sôi và một nằm trên. Khí lò nóng có thể chạy tua bin sử dụng gas phát điện. Hệ thống PFBC có thể được sử dụng trong đồng phát (hơi và điện) hoặc phát điện chu trình kết hợp. Việc vận hành chu trình kết hợp (tua bin dùng gas và tua bin chạy bằng hơi nước) sẽ cải tiện hiệu suất chuyển đổi toàn phần từ 5 đến 8 %.
1.5.7 Lò hơi buồng lửa tầng sôi tuần hoàn khí (CFBC):
Với hệ thống tuần hoàn, các thông số của tầng nhiên liệu được duy trì để thúc đẩy việc loại sạch những hạt rắn trong tầng nhiên liệu. Chúng nâng lên, pha trộn trong dàn ống lên và hạ xuống theo cyclon phân li và quay trở lại. Trong tầng nhiên liệu, không có ống sinh hơi. Việc sinh hơi và làm quá nhiệt hơi diễn ra ở bộ phận đối lưu, thành ống nước và ở đầu ra của dàn ống nâng lên.
Các lò hơi buồng lửa tầng sôi tuần hoàn khí thường kinh tế hơn so với lò hơi buồng lửa tầng sôi không khí khi áp dụng trong các doanh nghiệp công nghiệp cần sử dụng lượng hơi lớn hơn 75 – 100 T/h. Với các nhà máy có nhu cầu lớn hơn, nhờ đặc điểm lò đốt cao của hệ thống lò hơi buồng lửa tầng sôi tuần hoàn khí sẽ cung cấp khoảng trống lớn hơn để sử dụng, các hạt nhiên liệu lớn hơn, và thời gian lưu hấp thụ để đạt hiệu suất cháy và mức SO2 cao hơn, việc áp dụng các công nghệ để kiểm soát mức NOx cũng dễ dàng hơn so với lò hơi buồng lửa tầng sôi không khí
1.5.8 Lò hơi sử dụng nhiệt thải:
Bất cứ nơi nào có sẵn nhiệt thải ở nhiệt độ cao hoặc trung bình đều có thể lắp đặt lò hơi sử dụng nhiệt thải một cách kinh tế. Khi nhu cầu hơi cao hơn lượng hơi tạo ra từ nhiệt thải, có thể sử dụng lò đốt nhiên liệu phụ trợ. Nếu không cần sử dụng hơi trực tiếp có thể sử dụng hơi cho máy phát tua bin chạy bằng hơi để phát điện. Lò hơi loại này được sử dụng rộng rãi với nhiệt thu hồi từ khí thải của tua bin chạy bằng gas hoặc các động cơ diezen.
CHƯƠNG 2: TÍNH TOÁN TRUYỀN NHIỆT, GIỮ NHIỆT, TỔN THẤT NHIỆT
2.1 Truyền nhiệt, giữ nhiệt:
2.1.1 Hiệu ứng nhà kính:
Hiệu ứng nhà kính là một trong các hiệu ứng quan trọng nhất được ứng dụng để khai thác năng lượng mặt trời. Hiệu ứng xảy ra như sau: các loại kính (hay thủy tinh) dùng trong xây dựng có đặc tính là chỉ cho các bức xạ mặt trời có bước sóng λ < 0,7 truyền qua (hệ số truyền qua của kính rất nhỏ đối với vùng phổ mặt trời này), các bức xạ còn lại λ > 0,7 (các tia này còn gọi là tia nhiệt ) thì bị kính ngăn lại (hệ số phản xạ của kính đối với vùng phổ này rất lớn). Tùy theo tính chất vật liệu và bề dày của tấm kính mà bức xạ truyền qua nhiều hay ít. Như đã biết, phần lớn năng lượng mặt trời, khoảng 70% nằm trong vùng phổ λ< 0,7.
Hình 2.1 Sơ đồ hộp thu năng lượng mặt trời sử dụng hiệu ứng nhà kính
Ta khảo sát một buồng kín hình hộp như mô tả trên hình 2.1, mặt trên hộp được đậy bằng kính, thành chung quanh và đáy làm bằng vật liệu cách nhiệt tốt. Đáy hộp là một tấm kim loại dãn nhiệt tốt, mặt trên của tấm được phủ một lớp sơn đen có hệ số hấp thụ cao. Tấm này được gọi là tấm hấp thụ. Tia Mặt trời sau khi truyền qua tấm kính đậy phía trên hộp, tới bề mặt tấm hấp thụ, bị tấm này hấp thụ một một phần và chuyển hóa thành nhiệt làm cho tấm hấp thụ nóng lên. Khi đó tấm hấp thụ trở thành nguồn phát ra các tia bức xạ nhiệt thứ cấp có bước sóng dài hướng về mọi phía. Nhờ nhận liên tục các tia bức xạ mặt trời nên nó được nung nóng liên tục, và bức xạ nhiệt cũng được phát xạ liên tục. Những tia bức xạ nhiệt hướng lên phía trên bị kính ngăn lại do phần lớn các tia bức xạ nhiệt thứ cấp có bước sóng dài λ > 0,7 (nhiệt độ tấm hấp thụ không cao), bị phản xạ trở về tấm hấp thụ và bị tấm hấp thụ hấp thụ,v.v…quá trình này dẫn đến nhiệt độ tấm hấp thụ tăng dần lên nhờ các mặt đáy và các thành bên được cách nhiệt tốt không bị truyền dẫn ra ngoài hộp. Kết quả là năng lượng từ các tia bức xạ mặt trời vào được hộp mà không ra ngoài được. Hộp thu trở thành một cái bẩy nhiệt, hiện tượng đó được gọi là hiệu ứng nhà kính. Nhiệt độ của tấm hấp thụ càng cao, phát xạ nhiệt từ mặt hấp thụ càng lớn, cho đến khi năng lượng mà tấm hấp thụ nhận được từ bức xạ. Mặt trời cân bằng với năng lượng mất mát cho môi trường xung quanh thì trạng thái cân bằng nhiệt được thiết lập.
2.1.2 Sự phản xạ của bức xạ mặt trời:
Đối với các bề mặt nhẵn, biểu thức Fresnel của độ phản xạ qua môi trường thứ nhất có độ khúc xạ (chiết xuất) n1 đến môi trường thứ 2 có chiết xuất n2 là:
đối với thành phần vuông góc.
đối với thành phần song song của bức xạ.
r= là độ phản xạ trung bình của hai thành phần song song và vuông góc.
Ei, Er tương ứng là cường độ bức xạ tới, cường độ bức xạ phản xạ.
Các góc và là góc tới và góc khúc xạ, có quan hệ với độ khúc xạ n theo định luật Snell:
Như vậy nếu biết các đại lượng góc và, và chiết suất các môi trường n, nta có thể xác định được độ phản xạ của bề mặt:
Hinh 2.2 Quá trình truyền của tia bức xạ
Đối với tia bức xạ tới vuông góc và =0 và các phương trình kết hợp trên có thể kết hợp:
Nếu một môi trường là không khí (chiết suất n2=1) thì:
r0=
Đối với các loại bộ thu năng lượng mặt trời thường sử dụng kính hoặc vật liệu màng mỏng trong suốt phủ trên bề mặt hấp thụ bức xạ nhiệt, vì vậy luôn luôn có hai bề mặt ngăn cách của mỗi lớp vật liệu phủ gây ra tổn thất phản xạ. Nếu bỏ qua nhiệt lượng hấp thụ của lớp vật liệu này và xét tại thời điểm mà chỉ có thành phần vuông góc của bức xạ tới, thì đại lượng (1-) của tia bức xạ tới sẽ tới được bề mặt thứ hai, trong đó đi qua bề mặt phân cách và bị phản xạ lại bề mặt phân cách thứ nhất….Cộng tất cả các thành phần được truyền qua thì hệ số truyền qua của thành phần vuông góc sẽ là:
Đối với thành phần song song cũng có kết quả tương tự va hệ số truyền qua trung bình của cả hai thành phần:
dr =
Nếu bộ thu có N lớp vật liệu phủ trong suốt như nhau thì:
drN =
Hình 2.3 Quá trình truyền của tia bức xạ qua lớp phủ không hấp thụ.
2.1.3 Tổn thất do hấp thụ của kính:
Sự hấp thụ bức xạ trong vật liệu không trong suốt được xác định bởi định luật Bougure dựa trên giả thiết là bức xạ bị hấp thụ tỷ lệ với cường độ bức xạ qua vật liệu và khoảng cách x mà bức xạ đi qua: dE = - EKdx với K là hằng số tỷ lệ. Lấy tích phân dọc theo đường đi của tia bức xạ trong vật liệu từ 0 đến δ /cosθ2 (với δ là chiều dày của lớp vật liệu) ta có hệ số truyền qua của vật liệu khi có hấp thụ bức xạ:
Da =
Trong đó, Ed là cường độ bức xạ truyền qua lớp vật liệu.
Đối với kính: K có trị số xấp xỉ 4m-1 đối với loại kính có cạnh màu trắng bạc và xấp xỉ 32m-1 đối với loại kính có cạnh màu xanh lục.
2.1.4 Hệ số truyền qua và hệ số phản xạ của kính:
Hệ số truyền qua, hệ số phản xạ và hệ số hấp thụ của một lớp vật liệu có thể được xác định như sau :
Đối với thành phần vuông góc của bức xạ:
D
Thành phần song song của bức xạ cũng được xác định bằng các biểu thức tương tự. Đối với bức xạ tới không phân cực, các tính chất quang học được xác định bằng trung bình cộng của hai thành phần này.
Đối với các bộ thu NLMT thực tế, Da thường lớn hơn 0,9 và r ≈0,1. Vì vậy từ phương trình trên ta có giá trị D ≈ 1 (tương tự D// ≈ 1).
2.1.5 Hệ số truyền qua đối với bức xạ khuếch tán:
Do bức xạ khuếch tán là vô hướng nên về nguyên tắc lượng bức xạ này truyền qua kính có thể được xác định bằng cách tích phân dòng bức xạ theo tất cả các góc tới. Tuy nhiên do sự phân bố góc của bức xạ khuếch tán nói chung không thể xác định đựơc nên khó xác định biểu thức tích phân này. Nếu bức xạ khuếch tán đến không phụ thuộc góc tới thì có thể tính toán đơn giản hóa bằng cách định nghĩa một góc tương đương đối với bức xạ có cùng hệ số truyền qua như tán xạ. Đối với một khoảng khá rộng các điều kiện tính toán thì góc tương đương này là 600. Nói cách khác, trực xạ với góc tới 600 có cùng hệ số truyền qua như bức xạ khuếch tán đẳng hướng.
Hình 2.4 là quan hệ giữa góc tới hiệu quả của bức xạ tán xạ đẳng hướng và bức xạ phản xạ từ mặt đất với các góc nghiêng khác nhau của bộ thu. Có thể xác định gần đúng quan hệ này bằng biểu thức toán học sau:
Đối với bức xạ phản xạ từ mặt đất:
θhq = 90 - 0,5788β + 0,002693β2
Đối với bức xạ khuếch tán:
θhq = 59,7 - 0,1388β + 0,001497β2
...................................................................................................................................................
CHƯƠNG 4 : TÌM HIỂU ĐỘNG CƠ BƯỚC VÀ CÁC CÁCH ĐIỀU KHIỂN
4.1Giới thiệu:
Điều khiển chuyển động trong lĩnh vực điện tử nghĩa là điều khiển chính xác chuyển động của một đối tượng dựa trên cả về tốc độ, khoảng cách, tải trọng, quán tính hoặc tất cả các yếu tố trên.
Có nhiều hình thức điều khiển chuyển động, bao gồm động cơ bước, động cơ DC, động cơ servo.
Trong phần này sẽ đi vào nghiên cứu hoạt động của động cơ bước. Về lí thuyết động cơ bước là một thiết bị có cấu tạo tương đối đơn giản. Nó không có chổi than hay công tắc. Về cơ bản đó là một động cơ đồng bộ được chuyển mạch bởi các đặc tính điện từ để xoay quanh lõi nam châm. Cụ thể các mấu trong động cơ là stato, và roto là nam châm vĩnh cửu hoặc trong các trường hợp của động cơ biến từ trở, nó là những khối răng làm bằng vật liệu nhẹ có từ tính, tất cả các mạch đảo phải được điều khiển bên ngoài bởi bộ điều khiển, hơn thế các động cơ và bộ điều khiển được thiết kế để động cơ có thể giữ nguyên bất kì vị trì nào, cũng như quay tới bất kì vị trí nào.
Động cơ bước có thể được dùng trong các hệ thống điều khiển vòng hở đơn giản, những hệ thông này đảm bảo cho hệ thống điều khiển gia tốc với tải tĩnh nhưng khi tải trọng thay đổi hoặc điều khiển với gia tốc lớn hơn người ta vẫn dùng hệ thống điều khiển vòng kín với động cơ bước. Nếu một động cơ bước trong hệ điều khiển vòng hở quá tải, tất cả các giá trị về vị trí của động cơ bước đều bị mất và hệ thống phải nhận diện lại từ đầu.
Một hệ thống động cơ bước gồm ba yếu tố cơ bản và thường được kết hợp với các thành phần khác tùy theo yêu cầu của người dùng:
Hình 4.1: hệ thống động cơ bước
+Indexer
+Driver
+Motor
Bộ phận điều khiển là một bộ vi xử lí có khả năng tạo ra các xung bước và các tín hiệu trực tiếp để lái động cơ, ngoài ra bộ điều khiển còn phải thực hiện các chức năng phức tạp khác.
Mạch lái (hay mạch khuyếch đại) chuyển những tín hiệu điều khiển thành những tín hiệu có công suất cần thiết để cung cấp cho các cuộn dây trong động cơ . Có nhiều loại động cơ bước khác nhau về cấu tạo, dòng điện tiêu thụ. Không phải tất cả mạch lái đều có thể áp dụng cho một loại động cơ nào đó. Vì vậy phải biết lựa chọn mạch lái phù hợp sao cho hệ thống hoạt động ổn định.
Động cơ bước là thiết bị điện từ mà chuyển những tín hiệu dạng xung số sang chuyển động của rotor. Ưu điểm của động cơ bước là giá thành thấp, độ tin cậy cao, moment cao ở tốc độ thấp và một cấu trúc đơn giản mà có khả năng hoạt động trong hầu hết các môi trường.
Khuyết điểm của động cơ bước là ảnh hưởng của tiếng ồn khi hoạt động ở tốc độ thấp và moment giảm khi tốc độ cao.
4.2 Các loại động cơ bước:
Động cơ bước được chia làm hai loại: nam châm vĩnh cửu và biến từ trở.
4.2.1 Động cơ thay đổi từ trở ( Variable reductance motor)
Hình 4.2: động cơ biến từ trở
Động cơ thay đổi từ trở không dùng nam châm vĩnh cửu. Rotor có thể chuyển động mà không chịu sự hãm hay giảm moment. Cấu trúc của loại này thích hợp cho những ứng dụng phi công nghiệp mà không cần độ chính xác cao về moment.
Loại motor thay đổi từ trở trên có 4 stator pole sets (A,B,C), đặt cách nhau 150 . Dòng điện được đặt vào cực A qua cuộn dây tạo ra từ trường hút cực của rotor (các bánh răng về phía nó). Tương tự như vậy khi dòng điện đi qua cuộn dây B, bánh răng rotor sẽ quay về hướng B, rồi C, sau đó quay trở về A và ta có rotor quay theo chiều kim đồng hồ, thay đổi chiều quay cho động cơ bằng cách thay đổi thứ tự kích (đổi C cho A).
4.2.2 Động cơ bước dùng nam châm vĩnh cửu (permanent magnet motor PM)
Hình 4.3: Động cơ bước dùng nam châm vĩnh cửu
Động cơ bước dùng nam châm vĩnh cửu có rotor là một nam châm vĩnh cửu. Nó có tốc độ thấp và bước góc lớn từ 450 tới 900. Do cấu trúc tương đối đơn giản và giá thành rẻ nên động cơ này là một sự lựa chọn lí tưởng cho những ứng dụng không mang tính công nghiệp.
Không như các loại động cơ khác, rotor cùa PM motor không có bánh răng và được thiết kế để bị từ hóa ở một góc phải đến trục của nó. Hình 1.3 biểu diễn động cơ PM có 4 pha (A,B,C,D), tương ứng với bước góc 450. Bằng cách đưa dòng vào mỗi pha theo thứ tự ta sẽ điều khiển được rotor bằng cách điều chỉnh từ trường qua rotor.
Mặc dù PM motor có tốc độ thấp nhưng nó lại có moment khá cao nên được dùng trong những ứng dụng cần moment lớn.
4.2.3 Động cơ bước kết hợp hai loại trên (hybrid):
Động cơ này kết hợp đặc tính tốt của hai loại động cơ trên. Chúng được cấu tạo từ nhiều cặp cực stator và một rotor nam châm vĩnh cửu. Động cơ chuẩn loại này có 100 cặp cực stator và do đó bước góc chỉ là 1.80. Những động cơ khác cùng loại có bước góc 0.90 hay 3.60 tùy số cặp cực stato nó có. Bởi chúng có moment tĩnh và động khá cao và tốc độ cũng lớn nên được sử dụng trong đa số các ứng dụng công nghiệp.
Hình 4.4: Động cơ bước loại hybrid
4.3 Dây cuốn động4.3.1 Đơn cực:
Hình 4.5: Dây quấn đơn cực
Động cơ đơn cực hay còn gọi là động cơ 6 dây gồm 2 cuộn dây trên 1 cực stato.
4.3.2 Lưỡng cực:
Động cơ đôi cuộn ( hay còn gọi là động cơ bốn dây) gồm có hai cuộn dây giống hệt nhau và không có cực chung. Kiểu quấn dây này hoạt động theo cách chuyển dòng từ cuộn này đến cuộn khác, nếu theo huớng ngược lại sẽ đảo chiều quay của động cơ. Trong khi đó trong ứng dụng của đơn cuộn, để thay đổi hướng cần đảo ngược dòng điện trong cùng cuộn.
4.4 Chế độ bước:
Động cơ bước có 3 chế độ bước: toàn bước, bán bước và vi bước.
4.4.1 Toàn bước:
Cho một động cơ quay S radian mỗi bước, biểu đồ moment xoắn theo vị trí góc của rotor so với vị trí cân bằng ban đầu sẽ có dạng gần đúng hình sin.
Đối với động cơ 3 mấu biến từ trở hoặc nam châm vĩnh cửu có góc bước S, chu kì của moment so với vị trí sẽ là 3S, với một động cơ 5 pha, chu kì sẽ là 5S. Đối với động cơ 2 mấu nam châm vĩnh cửu hay hổn hợp, loại phổ biến nhất chu kì sẽ là 4S, như được mô tả như hình sau:
Hình 4.7: Moment ở chế độ toàn bước
Đối với một động cơ nam châm vĩnh cửu 2 mấu lí tưởng, đường cong này có thể mô tả toán học như sau:
Trong đó:
T: moment xoắn (torque).
h: moment xoắn giữ (holding torque).
s: góc bước, tính bằng radian (step angle).
: góc trục (shaft angle).
Moment xoắn giữ (holding torque) trên một mấu (winding) của động cơ bước là giá trị đỉnh của moment xoắn trên biểu đồ khi dòng qua một mấu đạt giá trị lớn nhất.
Đôi khi việc phân biệt giữa góc trục điện và góc trục cơ là việc làm cần thiết. Về mặt cơ, một vòng quay của rotor sẽ là 2 rad. Về phương diện điện, một vòng được định nghĩa là một chu kì của đường cong moment xoắn đối với góc trục. Ở đây dùng để chỉ góc trục cơ, và để chỉ góc trục điện của một động cơ 4 bước/vòng.
Cho rằng đường cong moment xoắn so với vị trí góc gần đúng hình sin. Chừng nào mà moment xoắn còn bằng moment xoắn giữ, rotor sẽ vẫn nằm trong ¼ chu kì so với vị trí cân bằng. Đối với một động cơ nam châm vĩnh cửu hay hỗn hợp hai mấu, điều này có nghĩa là rotor sẽ giữ nguyên vị trí so với vị trí cân bằng trong phạm vi một bước.
Động cơ bước tiêu chuẩn có 200 răng rotor hoặc 200 toàn bước cho mỗi chiều quay của động cơ, mỗi bước ứng với 1.8 độ. Thông thường chế độ toàn bước được cung cấp bằng cách cung cấp năng lượng cho những cuộn dây khi đảo chiều dòng điện một cách luân phiên.
4.4.2 Bán bước:
Việc cung cấp điện đồng thời cho hai mấu động cơ sẽ sinh ra một moment xoắn theo vị trí là tổng của các moment xoắn đối với hai mấu động cơ riêng lẻ. Đối với động cơ hai mấu nam châm vĩnh cửu hoặc hổn hợp, hai đường cong này sẽ khác pha S radians, và nếu dòng qua hai mấu bằng nhau, đỉnh của tổng sẽ nằm ở vị trí S/2 radians kể từ đỉnh của đường cong gốc, như hình:
Hình 4.8: moment ở chế độ bán bước.
Đây là cơ bản của điều khiển bán bước. Moment xoắn giữ là đỉnh của đường cong moment xoắn kết hợp khi hai mấu có cùng dòng lớn nhất đi qua. Đối với động cơ nam châm vĩnh cửu và hổn hợp thông thường moment giữ hai mấu sẽ là:
h2=
Trong đó:
h1: moment xoắn giữ trên một mấu.
h2: moment xoắn giữ trên hai mấu.
Điều này cho thấy rằng không có phần nào trong mạch từ bão hòa và moment xoắn theo đường cong vị trí với mấu là hình sin lí tưởng.
Nếu bất kì phần nào trong mạch từ của động cơ bị bão hòa, hai đường cong moment xoắn sẽ không thể cộng tuyến tính với nhau. Kết quả là moment tổng hợp có thể không nằm chính xác tại vị trí S/2 kể từ vị trí cân bằng ban đầu.
Trong chế độ này cuộn thứ nhất được cung cấp năng lượng sau đó cuộn thứ hai được cung cấp năng lượng một cách luân phiên, điều này dẩn đến động cơ quay chỉ một nữa khoảng cách hay 0,9 độ/bước. Bán bước là một giải pháp thực tế hơn trong ứng dụng công nghiệp. Mặc dù nó cung cấp moment xoắn không đáng kể, nhưng chế độ bán bước giảm đáng kể vọt lố so với động cơ hoạt động ở chế độ toàn bước.
4.4.3 Vi bước:
Vi bước là một kĩ thuật mới trong động cơ bước mà điều khiển dòng điện trong cuộn dây động cơ bước đến một mức độ mà có thể chia nhỏ hơn nữa số vị trí giữa các cực.
Điều khiển vi bước cho phép các bước nhỏ hơn bằng việc dùng các dòng khác nhau qua hai mấu động cơ, như hình:
Hình 4.9: Moment ở chế độ vi bước.
Đối với một động cơ hai mấu biến từ trở hoặc nam châm vĩnh cửu, cho rằng các mạch từ không bão hòa và các đường cong moment xoắn trên mỗi mấu theo vị trí là một hình sin hoàn hảo, công thức dưới đây đưa ra những đặc tính chủ chốt của đường cong moment xoắn tổng hợp:
Trong đó:
a-moment xoắn áp trên mấu với vị trí cân bằng tại 0 radians.
b- moment xoắn áp trên mấu với vị trí cân bằng tại S radians.
h-moment xoắn giữ tổng hợp.
-vị trí cân bằng tính theo radians.
S-góc bước, tính theo radians.
Khi không có bão hòa, các moment xoắn a và b tỉ lệ với dòng đi qua các mấu tương ứng.
Vi bước thường được dùng trong những ứng dụng cần vị trí chính xác và vòng quay nhỏ trong một khoảng vận tốc nhỏ.
4.5 Ma sát và vùng chết:
Đường cong moment xoắn so với vị trí được chỉ ra trong hình 1.6 không tính đến moment xoắn động cơ để thắng lực ma sát. Lực ma sát có thể được chia thành hai loại lớn: lực ma sát nghỉ và lực ma sát trượt, cần phải có một moment xoắn đủ lớn để thắng lại nó, không kể đến vận tốc và ma sát động học hay lực nhớt, hoặc các cản trở khác không phụ thuộc vào vận tốc. Ở đây quan tâm đấn lực ma sát nghỉ. Cho rằng moment xoắn cần thiết để thắng lực ma sát nghỉ trong hệ là ½ giá trị đỉnh moment xoắn của motor, như miêu tả trong hình 1.7
Hình 4.10: Moment và ma sát.
Đường gạch đứt trong hình 1.7 chỉ ra moment xoắn cần thiết để thắng lực ma sát, chỉ có một phần đường cong moment xoắn bên ngoài đường gạch đứt làm cho rotor quay. Đường cong chỉ ra moment xoắn hiệu quả khi có lực ma sát trục không giống những đường cong này, như hình 1.8:
Hình 4.11: Moment khi có ma sát
Tác dụng của ma sát gồm hai phần. Đầu tiên tổng moment xoắn hiệu quả để quay tải bị giảm, thứ hai có một vùng chết nằm ở mỗi vị trí cân bằng của động cơ lí tưởng. Nếu rotor động cơ được đặt tại bất cứ đâu trong vùng chết đối với vị trí cân bằng tức thời, moment xoắn ma sát sẽ vượt quá moment xoắn tác dụng bởi các mấu động cơ, rotor sẽ không di chuyển. Cho rằng một đường cong hình sin lí tưởng giữa moment xoắn và vị trí khi không có ma sát, độ rộng góc của những vùng chết sẽ là:
d=
Trong đó:
d-độ rộng vùng chết tính bằng radians.
S-góc bước tính bằng radians.
f-moment xoắn cần thiết để thắng lực ma sát.
h-moment xoắn giữ.
Vùng chết có ảnh hưởng là giới hạn vị trí chính xác sau cùng.
Sự xuất hiện của vùng chết có ảnh hưởng lớn đến việc điều khiển vi bước thực tế. Nếu vùng chết rộng x độ, thì việc điều khiển vi bước với độ rộng một bước nhỏ hơn x độ có thể làm cho rotor không quay được. Vì vậy, đối với các hệ thống định vị dùng điều khiển vi bước có độ phân giải cao, việc giảm thiểu ma sát nghỉ là rất quan trọng.
4.6 Tìm hiểu các mạch điều khiển động cơ bước:
Có nhiều cách điều khiển động cơ bước. Tùy mục đích và điều kiện mà ta có thể sử dụng phương pháp nào cho phù hợp:
Các mạch sử dụng linh kiện rời kết hợp vi điều khiển có kích thước kồng kềnh, phức tạp và thời gian thi công lâu. Tuy nhiên mạch sử dụng linh kiện rời có tính ổn định cao và linh hoạt.
Các mạch sử dụng IC tích hợp chuyên dùng điều khiển động cơ bước. Phương pháp này cho kết quả nhanh chóng, hiệu quả và kinh tế tuy nhiên khó thay đổi bằng phần mềm.
Các mạch dùng linh kiện rời:
Hình 4.12: Mạch điều khiển dùng opto
Bằng cách sử dụng vi điều khiển kết hợp với mạch như hình trên ta có thể dễ dàng điều khiển một động cơ bước. Mạch sử dụng OPTO 4N35 có tác dụng cách li và tạo mức điện áp phù hợp mà động cơ cần cung cấp. Mosfet IRF540N có tác dụng như phần tử công suất để đóng ngắt mạch. Diode được sử dụng nhằm tránh dòng ngược do động cơ gây ra để bảo vệ mosfet.
Ngoài ra ta cũng có thể sử dụng các mạch lái khác như dùng IC lái ULN2003 hoặc ỤCN804. Sơ đồ mạch như hình dưới:
Hình 4.13: IC lái ULN 2003 và UCN 5804
Một mạch khác:
Hình 4.14: Mạch điều khiển động bước dùng L297 và L298
Mạch trên sử dụng L297 lái L298 để điều khiển động cơ bước, L298 chịu được điện áp tối đa là 46V, dòng lên tới 4A. Mạch nói trên cần chú ý giải nhiệt cho L298, để điều khiển động cơ bước ta chỉ cần dùng vi điều khiển kích các chân: CLOCK, EN,HALF/FULL,DIR, trong đó:
+ CLOCK: số xung cấp bằng số bước quay của động cơ
+ EN: cho phép động cơ bước hoạt động.
+ HALF/FULL: động cơ hoạt động ở chế độ nửa bước, hay toàn bước.
+ DIR: chọn chiều quay cho động cơ.
Một điều cần lưu ý khi dùng mạch trên là các diode được dùng là các diode loại fast recovery.
Các mạch dùng linh kiện tích hợp sẵn:
Tìm hiểu IC lái động cơ bước SLA 7026:
SLA7024, SLA7026, SLA7029 được thiết kế cho những ứng dụng của động cơ bước hai pha đơn cực với hiệu quả cao và khả năng thực thi cao. Một sự tự động hóa, kĩ thuật đóng gói có tính chất cải tiến kết hợp với các linh kiện FET công suất và các mạch logic/ điều khiển được đóng gói thành các dạng module đa chip công suất cải tiến (PMCMs-Power Multi Chip Module), hướng tới việc điều khiển hoàn toàn tự động bằng kĩ thuật điều khiển tích hợp.
Kĩ thuật chế tạo được tự động hóa cao tạo ra giá thành thấp và độ ổn định có thể chấp nhận được, PMCMs phù hợp cho việc điều khiển và lái trực tiếp một phạm vi rộng các loại động cơ đơn cực hai pha. Ba module đa chip lái động cơ trên khác nhau chủ yếu ở phạm vi dòng điện ngõ ra (từ 1.5-3A) và dạng đóng gói. Cả 3 PMCM có điện áp giới hạn tuyệt đối lớn nhất là 46V và tận dụng NMOSFET cải tiến cho dòng và áp ra cao để lái động cơ. Khả năng tốt của FET làm cho nó có khả năng chuyển mạch nhanh.
Hình 4.15: Sơ đồ chân SLA7024M và SLA7026M
Một số thông số quan trọng:
Load Supply Voltage, VBB . . . . . . . . . 46 V
FET Output Voltage, VDS . . . . . . . . . 100 V
Control Supply Voltage, VCC . . . .. . . 46 V
SLA7024M . . . . . . . . . . . . . . . . . . . . . 3.0 A
SLA7026M . . . . . . . . . . . . . . . . . . . . . 5.0 A
SMA7029M . . . . . . . . . . . . . . . . . . . . .3.0 A
Continuous Output Current, IOUT
SLA7024M . . . . . . . . . . . . . . . . . . . . . 1.5 A
SLA7026M . . . . . . . . . . . . . . . . . . . . . 3.0 A
SMA7029M . . . . . . . . . . . . . . . . . . . .. 1.5 A
Input Voltage Range, VIN . . . . ……...-0.3 V to 7.0 V
Reference Voltage, VREF . . . . . . . . . . 2.0 V
Junction Temperature, TJ . . . . . . .. . . +1500C
Operating Temperature Range: TA . . -200C to +850C
Sơ đồ cấu tạo chi tiết bên trong:
1.7 Thiết kế hệ thống bước:
Hình 4.16: Cấu tạo bên trong của SLA7026
Theo hình vẽ, cấu tạo SLA7026 bao gồm hai khối giống hệt nhau, mỗi khối gồm có một bộ so sánh điện áp để nhận biết điện áp phản hồi, một bộ điều khiển logic và một mạch thúc dòng để lái điện áp ngõ ra.
Đặc tính tích hợp cao với khả năng thực hiện đa công tạo cho SLA7026 những ưu điểm thấy rõ khi so với những mạch điều khiển động cơ bước khác dùng trasitor rời. Thông thường SLA7024M và SLA7029M không cần phải tản nhiệt. Riêng đối với SLA7026M, tùy vào yêu cầu mà có thể thiết kế những hệ thống với yêu cầu cao hơn về khả năng chịu dòng do đó bắt buộc phải có những biện pháp tản nhiệt đáng tin cậy cho những hệ thống này.
Điều rộng xung dòng điện được điều chỉnh bởi việc lựa chọn các điện trở chọn dòng, một khâu so sánh điện áp, một khâu phân áp và một mạch định thời RC một cách phù hợp. Các phần tử RC điều khiển thời gian tắt và điều khiển độ suy hao dòng điện. Điện áp đầu vào tương ứng với các IC số và vi điều khiển (5V).
Sau đây là mạch hoàn chỉnh để lái động cơ bước 2 pha đơn cực dùng SLA702X:
Hình 4.17: Sơ đồ điều khiển động cơ bước dùng SLA702X
Sự tưng thích điện giữa động cơ và driver là yếu tố quan trọng trong việc thiết kế hệ thống bước. Một số nguyên tắc tổng quát trong việc chọn thiết bị này là:
4.6.1 Độ tự cảm:
Động cơ bước tỉ lệ với độ thay đổi của độ tự cảm. Một động cơ có độ tự cảm cao sẽ cung cấp moment xoắn lớn ở vận tốc nhỏ và ngược lại moment xoắn nhỏ khi vận tốc lớn.
4.6.2 Kết nối song song và nối tiếp:
Có hai cách kết nối động cơ bước là song song và nối tiếp. Kết nối nối tiếp cung cấp độ tự cảm cao vì vậy hoạt động tốt hơn ở tốc độ thấp. Kết nối song song cung cấp độ tự cảm thấp nhưng tăng moment xoắn ở vận tốc cao.
4.6.3 Điện áp lái:
Điện áp lái driver càng cao và mức moment xoắn càng cao sẽ ngược với vận tốc. Tổng quát điện áp ra driver được xem như cao hơn tỉ lệ điện áp tỉ lệ của động cơ.
4.6.4 Tính chất nhấp nhô của động cơ:
Giảm dòng chạy qua động cơ bởi một tỉ lệ nhỏ sẽ làm trơn khi quay. Cũng như vậy tăng dòng chạy qua động cơ sẽ làm tăng tính chất nhấp nhô nhưng cũng sẽ cung cấp nhiều moment xoắn.
4.6.5 Sự chịu nhiệt của động cơ:
Động cơ bước được thiết kế chạy ở nhiệt độ 50 -> 90 độ c. Tuy nhiên dòng điện quá lớn sẽ làm nóng động cơ quá mức gây hại đến sự cách điện cuộn dây động cơ.
CHƯƠNG 5 : VI ĐIỀU KHIỂN HỌ MSC-51
5.1 Giới thiệu họ MCS-51:
MSC-51 là họ IC vi điều khiển do hãng Intel sản xuất. Các IC tiêu biểu cho họ là 8051 và 8031. Các sản phẩm MCS-51 thích hợp cho những ứng dụng điều khiển. Việc xử lí trên byte và các toán số học ở cấu trúc dữ liệu nhỏ được thực hiện bằng nhiều chế độ truy xuất dữ liệu nhanh trên RAM nội. Tập lệnh cung cấp một bảng tiện dụng những lệnh số học 8 bit gồm cả lệnh nhân và lệnh chia. Nó cung cấp những hổ trợ mở rộng trên chip dùng cho những biến một bit như là những kiểu dữ liệu riêng biệt, cho phép quản lí và kiểm tra bit trực tiếp trong điều khiển. 8951 là một vi điều khiển 8 bit chế tạo theo công nghệ CMOS chất lượng cao.
Các đặc điểm của 8951 được tóm tắt như sau:
- 4 KB bộ nhớ có thể lập trình lại nhanh, có khả năng tới 1000 chu kì ghi xóa ( đối với 8952 bộ nhớ này là 8 KB, và 8953 là 20KB).
- Tần số hoạt động từ 0 Hz tới 24Hz.
- 3 mức khóa bộ nhớ lập trình.
- 2 bộ Timer/counter 16 bit.
- 128 byte RAM nội.
- 4 port xuất nhập 8 bit.
- Giao tiếp nối tiếp.
- 64 KB vùng nhớ mã ngoài.
- 64 KB vùng nhớ dữ liệu ngoại.
- 210 vị trí có thể định vị bit.
- 4 cho hoạt động nhân hoặc chia.
- 5.2 Sơ đồ khối của AT89C51 được trình bày ở hình 5.1:
Hình 5.1 Sơ đồ khối của vi điều khiển.
5.3 Khảo sát sơ đồ chân 8951:
5.3.1 Sơ đồ chân 8951:
Hình 5.2 Sơ đồ chân 8951
5.3.2 Chức năng các chân của 8951:
8951 có tất cả 40 chân có chức năng như các đường xuất nhập. Trong đó có 24 chân có tác dụng kép (một chân có hai chức năng), mỗi đường có thể hoạt động như đường xuất nhập hoặc đường điều khiển hoặc là thành phần của các bus dữ liệu và bus địa chỉ.
a. Các port:
Port 0:
Port 0 là port có hai chức năng, ở các chân 32-39 của 8951. Trong các thiết kế không dùng bộ nhớ mở rộng nó có chức năng như các đường I/O. Đối với các thiết kế cần bộ nhớ lớn, nó được kết hợp giữa bus địa chỉ và bus dữ liệu.
Port 1:
Port 1 là port I/O trên các chân 1-8. Các chân được kí hiệu P1.0,P1.1,….có thể giao tiếp được với các thiết bị ngoài nếu cần. Port 1 không có chức năng khác, do vậy chúng chỉ được dùng cho giao tiềp với các thiết bị bên ngoài.
Port 2:
Port 2 là port có tác dụng kép trên các chân 21-28. Được dùng như các đường xuất nhập hoặc là byte cao của bus địa chỉ đối với các thiết bị dùng bộ nhớ mở rộng.
Port 3:
Port 3 là port có tác dụng kép trên các chân 10-17. Các chân của port này có nhiều chức năng, các công dụng chuyển đổi có liên hệ với các đặc tính đặc biệt của 8951 như bảng sau:
|
Bit |
Teân |
Chöùc naêng chuyeån ñoåi |
|
P3.0 |
RXT |
Ngoõ vaøo döõ lieäu noái tieáp. |
|
P3.1 |
TXD |
Ngoõ xuaát döõ lieäu noái tieáp. |
|
P3.2 P3.3 P3.4
P3.5
P3.6
P3.7 |
INT0\ INT1\ T0
T1
WR\
RD\ |
Ngoõ vaøo ngaét cöùng thöù 0. Ngoõ vaøo ngaét cöùng thöù 1. Ngoõ vaøo cuûa timer/counter thöù 0 Ngoõ vaøo cuûa timer/couter thöù1. Tín hieäu ghi döõ lieäu leân boä nhôù ngoaøi. Tín hieäu ñoïc boä nhôù döõ lieäu ngoaøi.
|
|
|
|
|
Hình 5.3 Chức năng các chân port 3.
b.Các ngõ tín hiệu điều khiển:
Ngõ tín hiệu PSEN (Program store enable):
PSEN là tín hiệu ngõ ra ở chân 29 có tác dụng cho phép đọc bộ nhớ chương trình mở rộng thường được nối đến chân OE (output enable) của eprom cho phép đọc các byte mã lệnh.
PSEN ở mức thấp trong thời gian 8951 lấy lệnh. Các mã lệnh của chương trình được đọc từ eprom qua bus dữ liệu và được chốt vào thanh ghi lệnh bên trong 8951 để giải mã lệnh. Khi 8951 thi hành chương trình trong ROM nội PSEN sẽ ở mức logic 1.
Ngõ tín hiệu điều khiển ALE (Address latch enable):
Khi 8951 truy xuất bộ nhớ bên ngoài, port 0 có chức năng là bus địa chỉ và bus dữ liệu do đó phải tách các đường địa chỉ và dữ liệu. Tín hiệu ra ALE ở chân 30 dùng làm tín hiệu điều khiển để giải đa hợp các đường địa chỉ và dữ liệu khi kết nối chúng với IC chốt.
Tín hiệu ra ở chân ALE là một xung trong khoảng thời gian port 0 đóng vai trò là địa chỉ thấp nên chốt địa chỉ hoàn toàn tự động.
Các xung tín hiệu ALE có tốc độ bằng 1/6 lần tần số dao động trên chip và có thể được dùng làm tín hiệu clock cho các phần khác của hệ thống. Chân ALE được dùng làm ngõ vào xung lập trình cho Eprom trong 8951.
Ngõ tín hiệu EA (External Access) :
Tín hiệu EA ở chân 31 thường được xác định ở 2 mức logic 1 và 0.Nếu ở mức 1 8951 thi hành chương trình từ ROM nội trong khoảng địa chỉ thấp 4KB. Nếu ở mức 0 8951 sẽ thi hành chương trình từ bộ nhớ mở rộng.
Ngõ tín hiệu RST (Reset):
Ngõ tín hiệu RST ở chân 9 là ngõ vào reset của 8951. Khi ngõ vào tín hiệu này đưa lên cao ít nhất là 2 chu kì máy, các thanh ghi bên trong được nạp những giá trị thích hợp để khởi động hệ thống. Khi mạch được cấp điện vi điều khiển tự động reset lần đầu.
Các ngõ vào bộ giao động X1,X2:
Bộ giao động được tích hợp bên trong 8951, khi sử dụng người thiết kế chỉ cần kết nối thêm thạch anh, tần số thạch anh thường được sử dụng là 12Mhz, khi kết nối giao tiếp với máy tính thường sử dụng tần số 11,0592 Mhz để đảm bảo chính xác.
5.4 Cấu trúc bên trong vi điều khiển:
5.4.1 Tổ chức bộ nhớ:
|
7F |
|
|
FF |
|
|
||||||||||||||||||||||||
|
|
|
|
F0 |
F7 |
F6 |
F5 |
F4 |
F3 |
F2 |
F1 |
F0 |
B |
|||||||||||||||||
|
|
RAM đa dụng |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
E0 |
E7 |
E6 |
E5 |
E4 |
E3 |
E2 |
E1 |
E0 |
ACC |
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
D0 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
PSW |
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
30 |
|
|
B8 |
- |
- |
- |
BC |
BB |
BA |
B9 |
B8 |
IP |
|||||||||||||||||
|
2F |
7F |
7E |
7D |
7C |
7B |
7A |
79 |
78 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
2E |
77 |
76 |
75 |
74 |
73 |
72 |
71 |
70 |
|
B0 |
B7 |
B6 |
B5 |
B4 |
B3 |
B2 |
B1 |
B0 |
P.3 |
||||||||||
|
2D |
6F |
6E |
6D |
6C |
6B |
6A |
69 |
68 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
2C |
67 |
66 |
65 |
64 |
63 |
62 |
61 |
60 |
|
A8 |
AF |
|
|
AC |
AB |
AA |
A9 |
A8 |
IE |
||||||||||
|
2B |
5F |
5E |
5D |
5C |
5B |
5A |
59 |
58 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
2A |
57 |
56 |
55 |
54 |
53 |
52 |
51 |
50 |
|
A0 |
A7 |
A6 |
A5 |
A4 |
A3 |
A2 |
A1 |
A0 |
P2 |
||||||||||
|
29 |
4F |
4E |
4D |
4C |
4B |
4A |
49 |
48 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
28 |
47 |
46 |
45 |
44 |
43 |
42 |
41 |
40 |
|
99 |
Không được mã hóa bit |
SBUF |
|||||||||||||||||
|
27 |
3F |
3E |
3D |
3C |
3B |
3A |
39 |
38 |
|
98 |
9F |
9E |
9D |
9C |
9B |
9A |
99 |
98 |
SCON |
||||||||||
|
26 |
37 |
36 |
35 |
34 |
33 |
32 |
31 |
30 |
|
|
|
|
|||||||||||||||||
|
25 |
2F |
2E |
2D |
2C |
2B |
2A |
29 |
28 |
|
90 |
97 |
96 |
95 |
94 |
93 |
92 |
91 |
90 |
P1 |
||||||||||
|
24 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
|
|
|
|
|||||||||||||||||
|
23 |
1F |
1E |
1D |
1C |
1B |
1A |
19 |
18 |
|
8D |
Không được mã hóa bit |
TH1 |
|||||||||||||||||
|
22 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
|
8C |
Không được mã hóa bit |
TH0 |
|||||||||||||||||
|
21 |
0F |
0E |
0D |
0C |
0B |
0A |
09 |
08 |
|
8B |
Không được mã hóa bit |
TL1 |
|||||||||||||||||
|
20 |
07 |
06 |
05 |
04 |
03 |
02 |
01 |
00 |
|
8A |
Không được mã hóa bit |
TL0 |
|||||||||||||||||
|
1F |
Bank 3 |
|
89 |
Không được mã hóa bit |
TMOD |
||||||||||||||||||||||||
|
18 |
|
|
88 |
8F |
8E |
8D |
8C |
8B |
8A |
89 |
88 |
TCON |
|||||||||||||||||
|
17 |
Bank 2 |
|
87 |
Không được mã hóa bit |
PCON |
||||||||||||||||||||||||
|
10 |
|
|
|
|
|
||||||||||||||||||||||||
|
0F |
Bank 1 |
|
83 |
Không được mã hóa bit |
DPH |
||||||||||||||||||||||||
|
08 |
|
|
82 |
Không được mã hóa bit |
DPL |
||||||||||||||||||||||||
|
07 |
Bank thanh ghi 0 |
|
81 |
Không được mã hóa bit |
SP |
||||||||||||||||||||||||
|
00 |
(mặc định cho R0 -R7) |
|
88 |
87 |
86 |
85 |
84 |
83 |
82 |
81 |
80 |
P0 |
|||||||||||||||||
Hình 5.4 Bảng tóm tắt các vùng nhớ 8951
5.4.2 Các thanh ghi có chức năng đặc biệt:
Bộ nhớ trong 8951 bao gồm ROM và RAM. RAM trong 8951 gồm nhiều thành phần: phần lưu trữ đa dụng, phần lưu trữ địa chỉ hóa từng bit, các bank thanh ghi và các thanh ghi chức năng đặc biệt.
8951 có bộ nhớ trong theo cấu trúc Harvard: có những vùng nhớ đặc biệt cho chương trình và dữ liệu. Chương trình và dữ liệu có thể chứa bên trong 8951 nhưng 8951 vẫn có thể kết nối với 64 KB bộ nhớ chương trình và 64 KB dữ liệu.
Hai đặc tính cần chú ý:
Các thanh ghi và các port xuất nhập đã được định vị trong bộ nhớ và có thể truy xuất trực tiếp giống như các địa chỉ bộ nhớ khác.
Ngăn xếp bên trong RAM nội nhỏ hơn so với RAM ngoại như trong các bộ vi điều khiển khác.
RAM bên trong 8951 được phân chia như sau:
Các bank thanh ghi có địa chỉ từ 00H tới 1FH.
RAM địa chỉ hóa từng bit có địa chỉ từ 20H tới 2FH.
RAM đa dụng từ 30H tới 7FH.
Các thanh ghi chức năng đặc biệt từ 80H đến FFH.
RAM đa dụng:
Mặc dù hình vẽ cho thấy 80 byte đa dụng chiếm các địa chỉ từ 30H tới 7FH, 32 byte dưới từ 00H đến 1FH cũng có thể dùng với mục đích tương tự (mặc dù chúng được dùng với mục đích khác).
Mọi địa chỉ trong RAM đa dụng đều có thể truy xuất tự do dùng kiểu địa chỉ trực tiếp hoặc gián tiếp.
RAM có thể truy xuất từng bit:
8951 chứa 210 bit được địa chỉ hóa, trong đó có 128 bit có chứa các byte có địa chỉ từ 20F tới 2FH và các bit còn lại chứa trong nhóm thanh ghi có chức năng đặc biệt.
Ý tưởng truy xuất từng bit bằng phần mềm là đặc tính mạnh của vi điều khiển nói chung. Các bit có thể được đặt, xóa, AND, OR,…, với 1 lệnh đơn giản. Đa số các vi xử lí khi thực hiện đòi hỏi một chuỗi lệnh đọc-sửa-ghi để đạt được mục đích. Ngoài ra các port cũng có thể truy xuất từng bit.
128 bit truy xuất từng bit này cũng có thể được truy xuất như các byte hoặc như các bit.
Các bank thanh ghi:
32 byte thấp của bộ nhớ nội được dành cho các bank thanh ghi. Bộ lệnh 8951 hỗ trợ 8 thanh ghi có tên từ R0 tới R7 và theo mặc định sau khi reset hệ thống, các thanh ghi này có địa chỉ từ 00H tới 07H.
Các lệnh dùng trong các thanh ghi R0 tới R7 sẽ ngắn hơn và nhanh hơn so với các lệnh có chức năng tương tự dùng kiểu địa chỉ trực tiếp.Các dữ liệu được dùng thường xuyên nên dùng trong các thanh ghi này.
Do có 4 bank thanh ghi nên tại một thời điểm chỉ có một bank thanh ghi được truy xuất bởi các thanh ghi R0 tới R7, để chuyển đổi việc truy xuất giữa các bank phải thay đổi các bit chọn thanh ghi trạng thái.
5.4.3 Các thanh ghi có chức năng đặc biệt:
Các thanh ghi nội của 8951 được truy xuất ngầm bởi bộ lệnh.
Các thanh ghi trong 8951 được định trạng thái như một phần của RAM trên chip vì vậy mỗi thanh ghi sẽ có một địa chỉ (ngoại trừ thanh ghi bộ đếm chương trình và thanh ghi lệnh vì các thanh ghi này hiếm khi bị tác động trực tiếp). Cũng như R0 đến R7, 8951 có 21 thanh ghi chức năng đặc biệt (SFR: Special Function Resgister) ở vùng trên của RAM nội từ địa chỉ 80H tới FFH.
Chú ý tất cả 128 địa chỉ từ 80H tới FFH không được định nghĩa, chỉ có 21 thanh ghi có chức năng đặc biệt được ghi sẵn địa chỉ.
Ngoại trừ thanh ghi A có thể được truy xuất ngầm như đã nói, đa số các thanh ghi có chức năng đặc biệt SFR có thể địa chỉ hóa từng bit hoặc từng byte.
Thanh ghi trạng thái chương trình (PSW: Program Status Word):
|
BIT |
SYMBOL |
ADDRESS |
DESCRIPTION |
|
PSW.7 |
CY |
D7H |
Cary Flag |
|
PSW.6 |
AC |
D6H |
Auxiliary Cary Flag |
|
PSW.5 |
F0 |
D5H |
Flag 0 |
|
PSW4 |
RS1 |
D4H |
Register Bank Select 1 |
|
PSW.3 |
RS0 |
D3H |
Register Bank Select 0 |
|
|
|
|
00=Bank 0; address 00H¸07H |
|
|
|
|
01=Bank 1; address 08H¸0FH |
|
|
|
|
10=Bank 2; address 10H¸17H |
|
|
|
|
11=Bank 3; address 18H¸1FH |
|
PSW.2 |
OV |
D2H |
Overlow Flag |
|
PSW.1 |
- |
D1H |
Reserved |
|
PSW.0 |
P |
DOH |
Even Parity Flag |
Hình 5.5 Trạng thái chương trình D0H
Chức năng từng bit trạng thái chương trình:
Cờ Carry CY (Carry Flag):
Cờ nhớ có tác dụng kép. Thông thường nó được dùng cho các lệnh toán học: C=1 nếu phép toán cộng có sự tràn hoặc phép trừ có mượn và ngược lại C=0 nếu phép toán cộng không tràn và phép trừ không có mượn.
Cờ Carry phụ AC (Auxiliary Carry Flag




