ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ, CHẾ TẠO HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI VÀ MÔ HÌNH THỦY CANH VÀ ĐỊA CANH




NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP
THIẾT KẾ, CHẾ TẠO HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI VÀ MÔ HÌNH THỦY CANH VÀ ĐỊA CANH
NỘI DUNG
Tên đề tài: THIẾT KẾ, CHẾ TẠO HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI KẾT HỢP VỚI MÔ HÌNH THỦY CANH VÀ ĐỊA CANH
Với các yêu cầu sau:
A- PHẦN BẢN VẼ
- Bản vẽ sơ đồ nguyên lý (A0).
- Bản vẽ lắp máy (A0)
- Bản vẽ lắp cụm của máy (A0).
- Bản vẽ các chi tiết gia công của máy (6 chi tiết/1 A0).
B- PHẦN THUYẾT MINH
Chương 1: Tổng quan nghiên cứu đề tài.
Chương 2: Cơ sở lý thuyết.
Chương 3: Phương hướng và các giải pháp.
Chương 4: Tính toán thiết kế máy.
Chương 5: Chế tạo thử nghiệm.
Kết luận – kiến nghị.
Tài liệu tham khảo.
C- PHẦN MÔ HÌNH:
Hoàn thành mô hình máy. (GV hướng dẫn hỗ trợ tấm pin năng lượng mặt trời 110W và động cơ bơm nước 12VDC)
MỤC LỤC
LỜI NÓI ĐẦU ........................................................................................................ 5
LỜI CẢM ƠN......................................................................................................... 6
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN .................................................... 7
NHẬN XÉT CỦA HỘI ĐỒNG CHẤM ĐỒ ÁN ................................................... 8
CHƯƠNG I: TỔNG QUAN VỀ HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI KẾT HỢP MÔ HÌNH THỦY CANH VÀ ĐỊA CANH............................................................ 9
1.1. ĐẶT VẤN ĐỀ................................................................................................... 9
1.2. GIỚI THIỆU CHUNG VỀ MÔ HÌNH THỦY CANH VÀ ĐỊA CANH............. 9
1.2.1. Mô hình thủy canh...................................................................................... 9
1.2.2. Mô hình địa canh....................................................................................... 11
1.3. GIỚI THIỆU CHUNG VỀ NGUỒN NĂNG LƯỢNG PIN MẶT TRỜI.......... 13
CHƯƠNG 2: CƠ SỞ LÝ THUYẾT .................................................................... 17
2.1. CƠ SỞ LÝ THUYẾT VỀ NĂNG LƯỢNG MẶT TRỜI.................................. 17
2.2. CƠ SỞ LÝ THUYẾT VỀ HỆ THỐNG ĐIỀU HƯỚNG PIN NĂNG LƯỢNG MẶT TRỜI............................................................................................................................... 17
2.3. CƠ SỞ LÝ THUYẾT VỀ MÔ HÌNH TRỒNG RAU THỦY CANH, ĐỊA CANH18
2.4. KẾT LUẬN..................................................................................................... 20
CHƯƠNG III: PHÂN TÍCH LỰA CHỌN CÁC PHƯƠNG ÁN XÂY DỰNG HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI VÀ MÔ HÌNH THỦY CANH, ĐỊA CANH.. 21
3.1. MỤC TIÊU VÀ PHẠM VI CỦA HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI21
3.1.1. Mục tiêu.................................................................................................... 21
3.1.2. Phạm vi nghiên cứu .................................................................................. 21
3.2. PHÂN TÍCH VÀ LỰA CHỌN MÔ HÌNH ĐIỀU HƯỚNG............................. 21
3.2.1. Các loại mô hình........................................................................................ 21
3.2.1.1. Hệ thống định hướng theo một trục........................................................ 23
3.2.1.2. Hệ thống định hướng theo hai trục......................................................... 23
3.2.2. Kết luận..................................................................................................... 24
3.3. MỤC TIÊU VÀ PHẠM VI CỦA MÔ HÌNH THỦY CANH, ĐỊA CANH...... 24
3.3.1. Mục tiêu..................................................................................................... 24
3.3.2. Phạm vi của mô hình................................................................................. 24
3.4. PHÂN TÍCH VÀ LỰA CHỌN MÔ HÌNH THỦY CANH............................... 24
3.4.1. Các loại mô hình thủy canh hiện nay......................................................... 24
3.4.1.1. Hệ thống thủy canh tĩnh......................................................................... 24
3.4.1.2. Hệ thống thủy canh động........................................................................ 25
3.4.2. Kết luận..................................................................................................... 27
CHƯƠNG IV: THIẾT KẾ, CHẾ TẠO HỆ THỐNG ĐIỀU HƯỚNG PIN NĂNG LƯỢNG MẶT TRỜI .......................................................................................................... 28
4.1. YÊU CẦU CỦA HỆ THỐNG ĐIỀU HƯỚNG PIN NĂNG LƯỢNG MẶT TRỜI 28
4.2. NGUYÊN LÝ HOẠT ĐỘNG.......................................................................... 28
4.3. THIẾT KẾ, CHẾ TẠO KẾT CẤU CƠ KHÍ.................................................... 30
4.3.1. Thiết kế...................................................................................................... 30
4.3.1.1. Phân tích, lựa chọn cơ cấu truyền động.................................................. 31
4.3.1.1.1 Phân tích các cơ cấu truyền động.......................................................... 31
4.3.1.1.2. Cơ cấu truyền động của các trục.......................................................... 35
4.3.1.2. Phân tích, lựa chọn động cơ dẫn động cho các trục................................ 40
4.3.1.3. Tính toán và chọn động cơ dẫn động cho hộp giảm tốc ........................ 43
4.3.1.4.Tính toán thiết kế bộ truyền trục vít – bánh vít....................................... 48
4.3.2. Chế tạo...................................................................................................... 54
4.4. THIẾT KẾ, CHẾ TẠO MẠCH ĐIỀU KHIỂN................................................ 58
4.4.1. Sơ đồ khối của mạch điều khiển hệ thống điều hướng pin năng lượng mặt trời 58
4.4.2. Chức năng của từng khối........................................................................... 60
4.4.2.1. Tấm pin năng lượng mặt trời.................................................................. 60
4.4.2.2. Bình ắc quy............................................................................................ 62
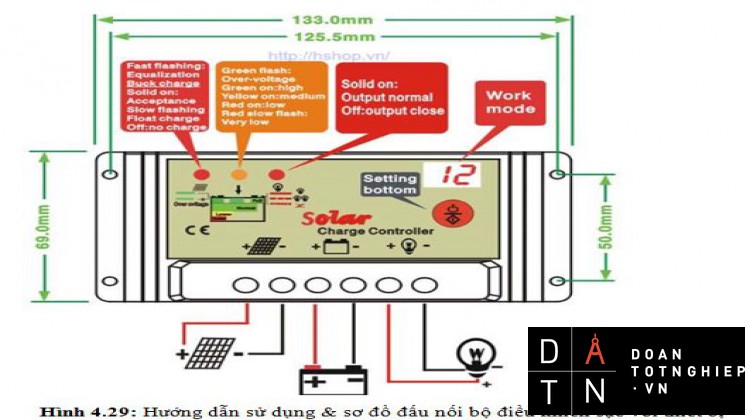
4.4.2.3. Bộ điều khiển sạc 30A (SOLAR CHARGE CONTROLLER)................ 63
4.4.2.4. Mạch giảm áp DC XL4005 (5A)............................................................ 66
4.4.2.5. Mạch giảm áp DC LM2596 (3A)............................................................ 67
4.4.2.6. Board Arduino mega 2560..................................................................... 67
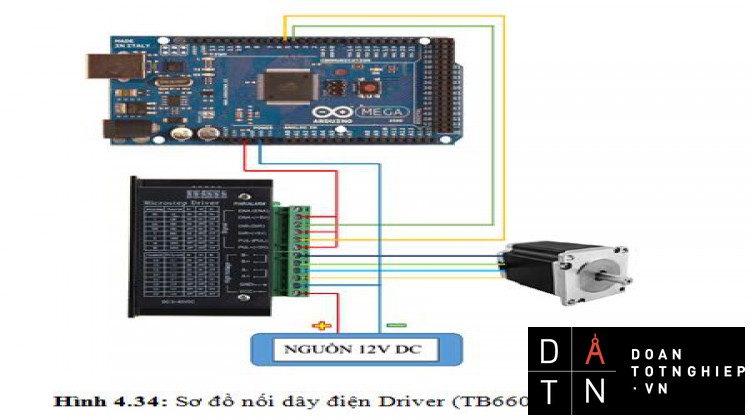
4.4.2.7. Driver động cơ (TB6600)....................................................................... 70
4.4.2.8. Mạch cầu H điều khiển động cơ DC ( L298)........................................... 74
4.4.2.9. Mạch cảm biến ánh sáng......................................................................... 76
4.4.2.10. Module đo cường độ ánh sáng BH1750FVI......................................... 77
4.4.3. Sơ đồ điện của hệ thống điều hướng pin năng lượng mặt trời.................... 80
CHƯƠNG V: THIẾT KẾ, CHẾ TẠO MÔ HÌNH THỦY CANH VÀ ĐỊA CANH 81
5.1. YÊU CẦU CỦA MÔ HÌNH THỦY CANH, ĐỊA CANH................................ 81
5.2. NGUYÊN LÝ HOẠT ĐỘNG ......................................................................... 81
5.3. THIẾT KẾ, CHẾ TẠO KẾT CẤU CƠ KHÍ.................................................... 81
5.3.1. Thiết kế, chế tạo và lựa chọn vật liệu cho hệ thống thủy canh, địa canh.... 81
5.3.2. Chọn động cơ bơm nước............................................................................ 89
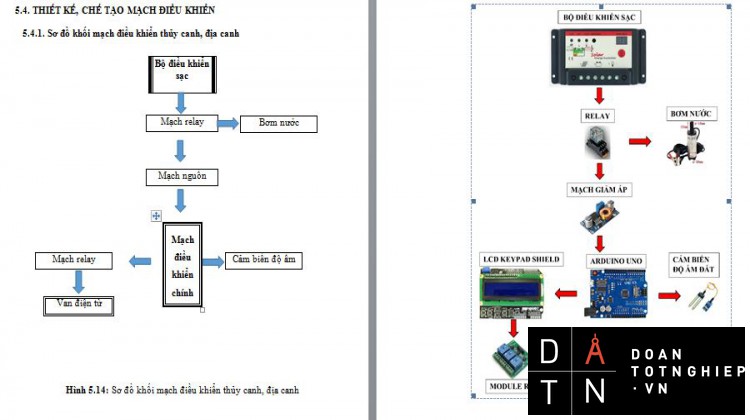
5.4. THIẾT KẾ, CHẾ TẠO MẠCH ĐIỀU KHIỂN................................................ 92
5.4.1. Sơ đồ khối mạch điều khiển thủy canh, địa canh....................................... 92
5.4.2. Chức năng của từng khối........................................................................... 94
5.4.2.1. Board Arduino UNO R3........................................................................ 94
5.4.2.2. ARDUINO LCD KEYPAD SHIELD...................................................... 96
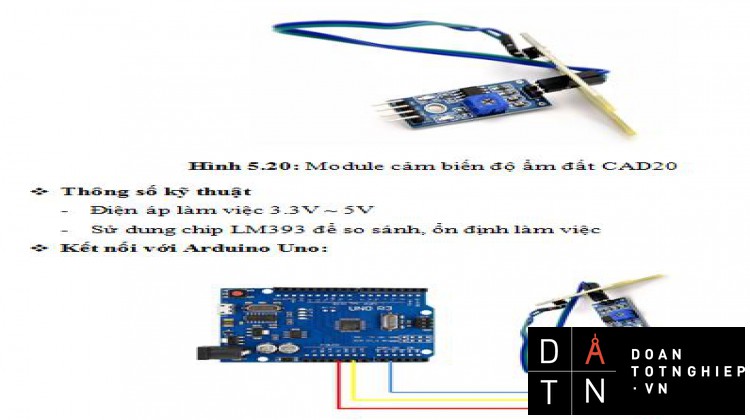
5.4.2.3. Module cảm biến độ ẩm đất CAD20...................................................... 99
5.4.2.4. Module Relay 3 Kênh 5V-220V/10A................................................... 101
5.4.2.5. Van điện từ 12V DC............................................................................. 103
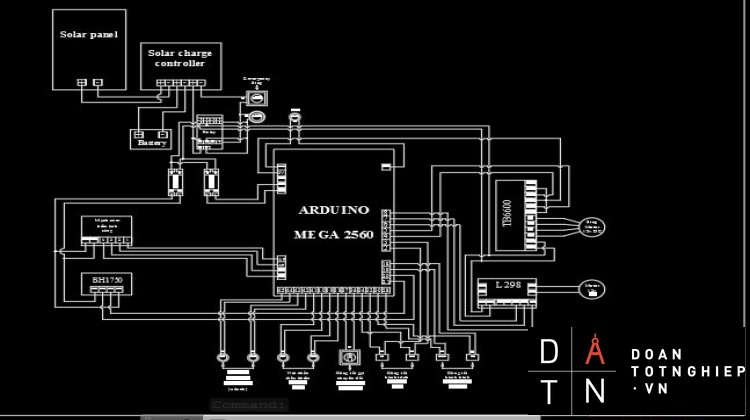
5.5. Sơ đồ điện của hệ thống thủy canh, địa canh................................................. 104
CHƯƠNG VI : CODE LẬP TRÌNH ARDUINO ........................................... 106
6.1. CODE LẬP TRÌNH HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI.............. 106
6.2. CODE LẬP TRÌNH ĐIỀU KHIỂN HỆ THỐNG TƯỚI TỰ ĐỘNG.............. 126
CHƯƠNG VII: THỬ NGHIỆM......................................................................... 136
7.1. HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI.............................................. 136
7.2. MÔ HÌNH THỦY CANH VÀ ĐỊA CANH................................................... 139
CHƯƠNG VIII: KẾT LUẬN............................................................................. 145
8.1. ĐÁNH GIÁ KẾT QUẢ ĐẠT ĐƯỢC............................................................ 145
8.2. NHỮNG HẠN CHẾ VÀ HƯỚNG KHẮC PHỤC......................................... 145
8.2.1. Về thiết kế cơ khí..................................................................................... 145
8.2.2. Về bộ điều khiển ..................................................................................... 146
8.3. HƯỚNG PHÁT TRIỂN CỦA ĐỀ TÀI.......................................................... 146
TÀI LIỆU THAM KHẢO.................................................................................. 147
CHƯƠNG I: TỔNG QUAN VỀ HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI KẾT HỢP VỚI MÔ HÌNH THỦY CANH VÀ ĐỊA CANH
1.1. ĐẶT VẤN ĐỀ
Để có thể kết hợp được việc sử dụng năng lượng mặt trời cho việc sản xuất trong nông nghiệp, thì cần phải thiết kế, chế tạo một mô hình sao cho phù hợp với từng trường hợp như: với không gian nhỏ hẹp ít diện tích, hay là một mô hình trồng trên diện rộng. Vì thế đòi hỏi người thiết kế phải xây dựng được một mô hình hợp lý, thuận tiện cho người có nhu cầu sử dụng.
1.2. GIỚI THIỆU CHUNG VỀ MÔ HÌNH THỦY CANH VÀ ĐỊA CANH
1.2.1. Mô hình thủy canh
Với tốc độ đô thị hóa như hiện nay thì việc thiếu đất canh tác đang là một vấn đề được đặt ra cho nhiều ngành cũng như các cơ quan chức năng. Đi kèm với nó, cuộc sống của người dân nơi đô thị hiện đang phải đối mặt với nhiều thực trạng, trong đó có vấn đề về sử dụng rau sạch cho sinh hoạt hàng ngày của gia đình. Do vậy, việc sản xuất rau quả an toàn và chất lượng cao bằng công nghệ thủy canh đã được thế giới công nhận và rất phù hợp cho Việt Nam. Sản phẩm có tên gọi “Hệ thống sản xuất rau sạch thủy canh” ra đời không chỉ đáp ứng được nhu cầu cấp thiết về rau sạch hiện nay cho người tiêu dùng, nâng cao sức khỏe cho cộng đồng mà còn cải thiện môi trường sống xung quanh, cụ thể như giảm thiểu việc sử dụng thuốc bảo vệ thực vật, tăng diện tích cây xanh, giảm hàm lượng khí thải CO2, tăng sinh dưỡng khí O2, nâng cao trình độ sản xuất nông nghiệp.
Sau đây là một số sản phẩm về hệ thống thủy canh đang được phát triển.
Hình 1.1 Dàn thủy cach được đặt gọn trong một góc vườn..
Hình 1.2 Có thể di chuyển dàn thủy cach khi trời nắng hoặc mưa.
1.2.2. Mô hình địa canh
Mô hình địa canh là(công nghệ cảm biến độ ẩm kết hợp với hệ thống tưới tự động)với một bước đột phá mới trong công nghệ nghiên cứu và sản xuất thiết bị cảm biến độ ẩm của đất,đã mở ra hướng đi mới về việc sử dụng nước tưới phù hợp với cây trồng. Năng suất cây trồng tăng và giảm lượng nước, phân bón, thuốc thực vật.
Các cảm biến trong hệ thống được gim vào những vùng đất được trồng rau. Ở đó, nó sẽ đưa thông tin ẩm về boad ARDUINO để xử lí thông tin. Khi % độ ẩm đất nhỏ hơn % độ ẩm đã được cài đặt, thì hệ thống tưới tự động sẽ cung cấp nước cho cây trồng đến khi % độ ẩm đất lớn hơn % độ ẩm đã cài đặt các béc tướisẽ tự ngừng phun.
Sử dụng cảm biến kết hợp với hệ thống tưới sẽ giúp tiết kiệm tối đa nguồn nước. Tăng năng suất cây trồng đảm bảo được độ ẩm cho cây trồng.
Một số hệ thống tưới tự động đang phát triển.
Hình 1.3: Hệ thống tưới tự động trong nhà vòm.
Hình 1.4: Lắp đặt hệ thống tưới tự động bằng cảm biến độ ẩm.
1.3. GIỚI THIỆU CHUNG VỀ NGUỒN NĂNG LƯỢNG PIN MẶT TRỜI
Ngày nay với tình hình dân số và nền công nghiệp phát triển không ngừng, năng lượng càng thể hiện rõ vai trò quan trọng và trở thành yếu tố không thể thiếu trong cuộc sống. Tuy nhiên trong khi nhu cầu sử dụng năng lượng ngày càng gia tăng thì các nguồn năng lượng truyền thống được khai thác sử dụng hàng ngày đang dần cạn kiệt và trở lên khan hiếm. Một số năng lượng đang được sử dụng như nguồn năng lượng hóa thạch (dầu mỏ than đá ...) đang cho thấy những tác động xấu đến môi trường, gây ô nhiễm bầu khí quyển như gây hệu ứng nhà kính… Các khí thải gây ra từ việc đốt các nguyên liệu này đã gây ra mưa axit, gây hại cho môi trường sống của con người. Còn nguồn năng lượng thủy điện cũng không đáp ứng nhu cầu tiêu thụ điện hiện nay trong khi tình trạng mức nước trong hồ chứa xuống dưới mức nước chết. Trước tình hình đó, vấn đề phải tìm được những nguồn năng lượng mới để đáp ứng nhu cầu sử dụng năng lượng đang lớn mạnh hàng ngày, thay thế những nguồn năng lượng có hại cho môi trường hoặc đang cạn kiệt và trở lên cấp thiết, đòi hỏi nhiều sự quan tâm.
So với những nguồn năng lượng mới đang được khai thác sử dụng như năng lượng gió, năng lượng hạt nhân… Năng lượng mặt trời được coi là một nguồn năng lượng rẻ, vô tận, là nguồn năng lượng sạch không gây hại cho môi trường đang thu hút sự quan tâm của rất nhiều nhà khoa học, nhà nghiên cứu và sẽ trở thành nguồn năng lượng tốt nhất trong tương lai. Hệ thống quang điện sử dụng năng lựng mặt trời (Pin mặt trời) có nhiều ưu điểm như không cần nguyên liệu, không gây ô nhiễm môi trường, ít phải bảo dưỡng, không gây tiếng ồn… Hiện nay năng lượng mặt trời đang được các nước phát triển tận dụng tối đa, năng lượng mặt trời được khai thác và đưa vào ứng dụng trong cuộc sống cũng như trong công nghiệp, nông nghiệp dưới nhiều dạng và hình thức khác nhau, thông thường để cấp nhiệt và điện.
Một số hình ảnh ứng dụng của pin mặt trời trong cuộc sống:
Hình 1.5: Pin mặt trời sử dụng trong sinh hoạt hàng ngày.
Hình 1.6: Pin mặt trời được dùng trong canh tác hoa màu.
Hình 1.7: Pin mặt trời được dùng để bơm nước cho ruộng lúa.
CHƯƠNG 2: CƠ SỞ LÝ THUYẾT
2.1. CƠ SỞ LÝ THUYẾT VỀ NĂNG LƯỢNG MẶT TRỜI
Trong việc tìm kiếm và phát triển sử dụng các nguồn năng lượng mới, đáp ứng tốt các nhu cầu về năng lượng và môi trường, năng lượng mặt trời được xem là dạng năng lượng ưu việt nhất. Có thể là dạng năng lượng chính được sử dụng trong tương lai, năng lượng mặt trời thực chất là nguồn năng lượng nhiệt hạch vô tận của thiên nhiên. Hàng năm mặt trời cung cấp cho trái đất một lượng năng lượng khổng lồ, gấp 10 lần các nguồn nhiên liệu có trên trái đất (Theo TẠP CHÍ KHOA HỌC VÀ CÔNG NGHỆ, ĐẠI HỌC ĐÀ NẴNG-SỐ 4(39).2010 137). Hiện nay năng lượng mặt trời được con người sử dụng dưới nhiều dạng khác nhau và thiết bị sử dụng năng lượng mặt trời cũng rất đa dạng, nhưng trong đó thiết bị cung cấp nước nóng và thiết bị nạp điện bằng năng lượng mặt trời có hiệu suất cao và rất phù hợp với điều kiện khí hậu của Việt Nam. Là một nước nhiệt đới, nằm ở vành đai nội chí tuyến nên tổng số giờ nắng trong năm lớn, ở khu vực miền trung có khoảng 2.900 giờ nắng/ năm và với cường độ bức xạ cao lên đến 950 W/m2 do đó rất thuận lợi cho việc triển khia ứng dụng các thiết bị sử dụng năng lượng mặt trời.
2.2. CƠ SỞ LÝ THUYẾT VỀ HỆ THỐNG ĐIỀU HƯỚNG PIN NĂNG LƯỢNG MẶT TRỜI
Năng lượng hóa thạch ngày càng cạn kiệt, dân số tăng vọt, kinh tế phát triển như vũ bão… đã dẫn đến yêu cầu bức thiết phải có những phương cách mới trong việc cung ứng và sử dụng năng lượng. Ước tính, nguồn năng lượng tự nhiên hiện nay của chúng ta sẽ cạn kiệt trong thời gian tới, trong đó dự báo nguồn dầu mỏ thương mại trên thế giới còn dùng khoảng 60 năm, khí tự nhiên 80 năm, than 150-200 năm. Nhưng thay vào đó, năng lượng mặt trời được xem là nguồn năng lượng tái tạo sạch nhất và ít gây ảnh hưởng đến môi trường nhất, có khắp trên bề mặt của trái đất. Đây thực sự là nguồn tài nguyên khổng lồ. Con người đã chế tạo ra được pin năng lượng mặt trời nhằm thực hiện chức năng tạo ra năng lượng điện.
Muốn thu được năng lượng mặt trời và có thể truyền nó đi được xa hơn, chúng ta cần pin mặt trời để chuyển năng lượng mặt trời từ dạng quang năng sang điện năng.
Pin năng lượng mặt trời chỉ đạt hiệu suất lớn nhất khi ánh sáng mặt trời vuông góc với mặt phẳng tấm pin. Tuy nhiên, hệ thống pin mặt trời hiện nay thường được lắp cố định nên làm giảm hiệu suất thu năng lượng của tấm pin. Để duy trì được hiệu suất của tấm pin ở mức cao nhất chúng ta cần một hệ thống điều chỉnh tấm pin luôn hướng về phía mặt trời.
Mục đích của đề tài là tự động hóa quá trình điều khiển định hướng tấm pin mặt trời kể cả khi bị mây che mất ánh sáng để tấm pin luôn đạt được hiệu suất lớn nhất.
Vào những ngày có nắng, mặt trời di chuyển một góc khoảng 180⁰ so với một điểm cố định trên mặt đất. Rõ ràng, một dàn pin đặt cố định sẽ thu được quang năng ít hơn nhiều so với một dàn pin luôn có xu hướng di động hứng trọn ánh nắng mặt trời.
2.3. CƠ SỞ LÝ THUYẾT VỀ MÔ HÌNH TRỒNG RAU THỦY CANH, ĐỊA CANH
Sản xuất rau ở nước ta hiện cơ bản đáp ứng nhu cầu tiêu thụ rau xanh của người dân, góp phần nâng cao chất lượng cuộc sống và từng bước nâng cao giá trị xuất khẩu rau của Việt Nam. Tuy nhiên, có hai yếu tố hạn chế chính và cản trở nhất của sản xuất rau hiện nay là giải quyết đủ rau trái vụ và đảm bảo an toàn vệ sinh thực phẩm. Vào chính vụ, giá rau thường rất rẻ, giá các loại rau sản xuất theo quy trình an toàn bị giảm hẳn, thu nhập của người sản xuất rau giảm sút, có doanh nghiệp thậm chí bị thua lỗ và phá sản, do đó chưa thúc đẩy được mạng lưới sản xuất rau an toàn và hình thành các vùng sản xuất rau tập trung. Vào lúc trái vụ, lượng rau thường không đủ, người trồng sử dụng nhiều nước phân, phân hóa học, hóa chất bảo vệ thực vật và điều hòa sinh trưởng nên giá cao và thường chất lượng rau chưa đảm bảo tiêu chuẩn an toàn vệ sinh thực phẩm. Đồng thời, một lượng lớn rau được nhập khẩu từ nước ngoài, phổ biến là từ Trung Quốc, gây khó khăn cho công tác giám sát chất lượng và an toàn vệ sinh thực phẩm.
Bên cạnh đó, việc sản xuất rau theo phương pháp truyền thống ở nước ta đã gây tình trạng ô nhiễm môi trường ngày càng trầm trọng (ô nhiễm nguồn nước, ô nhiễm đất), việc sử dụng ngày càng tăng các loại thuốc bảo vệ thực vật, thuốc kích thích sinh trưởng và sử dụng phân hoá học ngày càng nhiều đã làm cho sản phẩm nông nghiệp nói chung và sản phẩm rau của nước ta không đảm bảo an toàn. Cùng với quá trình đó, nhu cầu sử dụng rau xanh của người dân ngày càng tăng. Theo dự báo của FAO (2008), nhu cầu sử dụng rau xanh hằng năm tăng khoảng 5% .
Để giải quyết vấn đề này, đa dạng hóa loại hình sản xuất, áp dụng công nghệ cao, công nghệ có chi phí đầu tư thấp để duy trì sản xuất bình thường trong vụ rau trái vụ và quản lý an toàn vệ sinh thực phẩm đặc biệt là dư lượng kim loại nặng, vi sinh vật và thuốc bảo vệ thực vật là một hướng đi cần thiết. Trong thực tế chúng ta đã có nhiều cải tiến và giải pháp được đưa ra như trồng rau trong nhà lưới đơn giản, nhà lưới kiên cố, bán kiên cố, sử dụng vòm che di động trên đồng ruộng hay sản xuất trên nền giá thể, sản xuất rau mầm, sản xuất trên hệ thống điều khiển tự động trong nhà lưới đã được áp dụng, song mỗi công nghệ đều có những ưu điểm và bộc lộ những hạn chế nhất định. Phần lớn các hạn chế đều có liên quan đến quản lý đất trồng, quản lý nhiệt độ, ẩm độ trên đồng ruộng và trong nhà lưới. Do đặc điểm nhiệt đới có 4 mùa rõ rệt, nhiệt độ trong vụ rau hè rất cao, hiệu quả của các giải pháp trồng rau trong nhà lưới bị hạn chế, có thể có lúc thất bại. Từ những thực trạng trên cho thấy, việc lựa chọn giải pháp trồng rau thủy canh có thể góp phần giải quyết các tồn tại trên của ngành sản xuất rau nước ta hiện nay. Tuy có thể phạm vi mở rộng ứng dụng của công nghệ này không thể thay thế hoàn toàn các giải pháp khác, song nó sẽ là một trong các giải pháp phối hợp có hiệu quả để giải quyết vấn đề vệ sinh thực phẩm và sản xuất rau trái vụ ở nước ta. Việc áp dụng công nghệ này vào sản xuất cũng góp phần thúc đẩy sản xuất rau ở cả vùng núi cao, hải đảo không có tài nguyên đất phù hợp để trồng rau và những vùng đất bị ô nhiễm.
2.4. KẾT LUẬN
Từ những thực trạng đó, cùng với sự đam mê công nghệ mong muốn góp phần vận dụng những hiểu biết của mình vào thực tiễn để cho cuộc sống trở nên thuận tiện hơn. Sau khi tìm hiểu được những thông tin từ sách vở và internet thì nhóm em đã quyết định chọn đề tài “ Thiết kế hệ thống điều khiển tấm pin năng lượng mặt trời kết hợp với mô hình trồng rau thủy canh, địa canh” với mong muốn tạo ra một mô hình hoàn toàn sạch góp phần đáp ứng được nhu cầu thực tế hiện nay. Điều này cũng làm cho đề tài gần gũi với giá trị thực tiễn hơn.
CHƯƠNG III: PHÂN TÍCH LỰA CHỌN CÁC PHƯƠNG ÁN XÂY DỰNG HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI VÀ MÔ HÌNH THỦY CANH, ĐỊA CANH
3.1. MỤC TIÊU VÀ PHẠM VI CỦA HỆ THỐNG ĐIỀU HƯỚNG PIN MẶT TRỜI
3.1.1. Mục tiêu
- Nâng cao hiệu suất chuyển đổi của tấm pin thông qua việc điều khiển vị trí tấm pin luôn vuông góc với tia sáng mặt trời chiếu tới.
-Thiết kế phần cơ khí nhỏ gọn có thể cải thiện giá thành sản phẩm.
- Xây dựng được mạch điều khiển hoạt động ổn định với công suất định trước, nâng cao hiệu suất của mô hình.
- Hoàn thiện sản phẩm và nghiệm thu.
3.1.2. Phạm vi nghiên cứu :
- Đối tượng nghiên cứu : Arduino, cảm biến quang trở, động cơ điện một chiều, mạch điều khiển nạp, module điều khiển động cơ, module giảm áp, module điều khiển động cơ.
- Nghiên cứu lý thuyết về Arduino và xây dựng bài toán điều khiển góc quay của tấm pin mặt trời sao cho dàn pin có xu hướng luôn di động để nhận được nhiều ánh sáng từ mặt trời nhất làm tăng hiệu suất của tấm pin và điện năng nhận được.
- Xây dựng mô hình điều hướng pin mặt trời và hệ thống điện đáp ứng cung cấp đủ công suất hệ thống điều khiển và bơm nước của mô hình thủy canh hoạt động trong một ngày.
3.2. PHÂN TÍCH VÀ LỰA CHỌN MÔ HÌNH ĐIỀU HƯỚNG
3.2.1. Các loại mô hình
- Trong khuôn khổ đề tài này hệ thống quang điện cho quy mô gia đình sẽ được chọn làm mô hình nghiên cứu thử nghiệm.
Hình 3.1: Các loại mô hình 1 trục và 2 trục định hướng theo vị trí mặt trời
Các hệ thống có bộ định hướng có thể đạt công suất gần như tối đa suốt thời gian hoạt động vào những ngày nắng, quang mây trong khi hệ thống có mặt thu cố định chỉ đạt công suất tối đa trong một vài giờ trong giữa ngày.
Hệ thống PV có bộ định hướng theo vị trí mặt trời sẽ nhận được nhiều năng lượng hơn so với hệ thống có mặt thu cố định vào các giờ buổi sáng và buổi chiều.
Điều đó chỉ ra rằng các dàn pin có bộ định hướng sẽ cần công suất đặt nhỏ hơn so với các dàn pin lắp cố định mà vẫn sản ra cùng mức điện năng.
Thị trường hiện nay, có hai loại hệ thống năng lượng mặt trời định hướng,hệ thống định hướng theo trục đơn, và hệ thống định hướng theo trục kép. Hệ thống định hướng theo một trục duy nhất sẽ định hướng theo vị trí mặt trời từ Đông sang Tây trên một trục đặt theo hướng Bắc Nam. Hệ thống trục kép định hướng Đông sang phía Tây và định hướng theo phía Bắc đến phía Nam.
Qua nghiên cứu các tài liệu, đánh giá ưu khuyết điểm của các hệ thống địnhhướng theo vị trí mặt trời trên thế giới đề tài đã phân tích để đi đến lựa chọn mộtphương án thiết kế chế tạo hệ thống, căn cứ phân tích như dưới đây:
3.2.1.1. Hệ thống định hướng theo một trục
Định hướng theo vị trí mặt trời từ Đông sang Tây bằng cách sử dụng một trục duy nhất.
Ưu điểm:
- Tăng hiệu suất thu năng lượng mặt trời tới 32%.
- Thiết kế đơn giản, hiệu quả .
- Chi phí thấp hơn so với trục kép.
Nhược điểm:
- Lắp đặt cần phải có thiết bị xác định phương hướng.
- Bị giới hạn hướng bắc và hướng Nam, làm giảm hiệu suất thu năng lượng mặt trời nếu thiết bị xác định phương hướng không chính xác.
3.2.1.2. Hệ thống định hướng theo hai trục
Định hướng theo vị trí mặt trời từ Đông sang Tây, và phía Bắc đến phía Nam bằng cách sử dụng hai trục quay.
Ưu điểm:
- Tăng hiệu suất thu năng lượng mặt trời tới 37%.
- Dễ lắp đặt và không cần đến thiết bị xác định phương hướng.
- Hoạt động chính xác và không bị giới hạn như trục đơn.
Nhược điểm:
- Thiết kế phức tạp hệ thống các cảm biến và điều khiển động cơ.
- Chi phí đầu tư cao hơn do các bộ phận bổ sung.
3.2.2. Kết luận
Dựa trên những phân tích, so sánh trên đây, đề tài lựa chọn phương án hệ thống hai trục quay định hướng theo vị trí mặt trời. Mặc dù chi phí sẽ cao hơn một chúc so với trục đơn nhưng bù lại hệ thống sẽ thu được thêm 5% năng lượng và lắp đặt dễ hơn, di chuyển hệ thống qua vị trí khác cũng không cần phải xác định lai phương hướng.
3.3. MỤC TIÊU VÀ PHẠM VI CỦA MÔ HÌNH THỦY CANH, ĐỊA CANH
3.3.1. Mục tiêu
- Cung cấp nguồn rau sạch, đảm bảo an toàn vệ sinh thực phẩm đối với người sử dụng.
- Thiết kế phần mô hình nhỏ gọn để cải thiện giá thành sản phẩm thích hợp cho hộ gia đình.
3.3.2. Phạm vi của mô hình
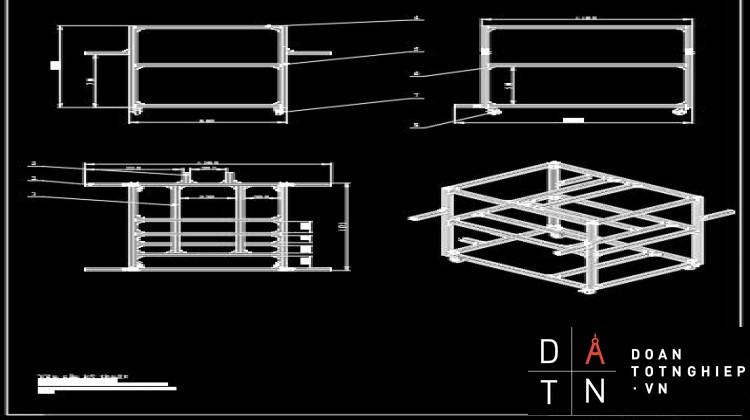
- Lắp đặt hệ thống thuỷ canh tuần hoàn (Thiết kế khung đỡ cho hệ thống thủy canh, địa canh, bể cấp dung dịch dinh dưỡng, ống dẫn dung dịch)
- Cách pha chế và sử dụng dung dịch dinh dưỡng.
- Thiết kế mạch điều khiển bơm nước cho mô hình thủy canh và đóng mở van điện từ (đóng mở nước) tự động bằng cảm biến độ ẩm, có hiển thị trên thông số và điều khiển trên LCD KEYPAD SHIELD.
3.4 PHÂN TÍCH VÀ LỰA CHỌN MÔ HÌNH THỦY CANH
3.4.1. Các loại mô hình thủy canh hiện nay
Căn cứ vào đặc điểm sử dụng dung dịch dinh dưỡng có thể chia thành hai hệ thống thủy canh, như sau:
3.4.1.1. Hệ thống thủy canh tĩnh
Hình 3.2: Mô hình thủy canh tĩnh
- Ở hệ thống này, một hoặc toàn bộ rễ cây được nhúng liên tục trong dung dịch dinh dưỡng là hệ thống mà trong quá trình trồng cây, dung dịch dinh dưỡng không chuyển động. Hệ thống này có ưu điểm là không phải đầu tư chi phí thiết bị làm chuyển động dung dịch nên giá thành thấp hơn, nhưng hạn chế là thường thiếu ôxy trong dung dịch và dễ sinh ra chua gây ngộ độc cho cây.
3.4.1.2. Hệ thống thủy canh động
Hình 3.3: Mô hình thủy canh hồi lưu
Hình 3.4: Mô hình thủy canh nhỏ giọt
Hình 3.5: Mô hình thủy canh dạng màng tinh thể NTF
Đây là loại hệ thống mà trong quá trình trồng cây, dung dịch dinh dưỡng có sự
chuyển động; chi phí cao hơn nhưng cây trồng không bị thiếu ôxy. Các hệ thống
thủy canh động hoạt động trên nguyên lý thủy triều, tưới nhỏ giọt và dạng màng
tinh thể NTF . Hệ thống thủy canh này chia làm hai loại như sau:
- Thủy canh mở là hệ thống thủy canh động mà trong đó dung dịch dinh
dưỡng không có sự tuần hoàn trở lại, gây lãng phí dung dịch.
- Thủy canh kín là hệ thống thủy canh động mà trong đó dung dịch dinh
dưỡng có sự tuần hoàn trở lại nhờ một hệ thống bơm hút dung dịch dinh
dưỡng từ bể chứa.
3.4.2. Kết luận
Dựa trên những phân tích, so sánh trên đây, đề tài lựa chọn hệ thống thủy canh kín là mô hình thủy canh dạng màng tinh thể NTF.
Trong hệ thống màng tinh thể NTF, dung dịch dinh dưỡng được bơm liên tục vào khay trồng và chảy qua rễ của cây, sau đó chúng chảy về bồn chứa để tái sử dụng.
CHƯƠNG IV: THIẾT KẾ, CHẾ TẠO HỆ THỐNG ĐIỀU HƯỚNG PIN NĂNG LƯỢNG MẶT TRỜI
4.1. YÊU CẦU CỦA HỆ THỐNG ĐIỀU HƯỚNG PIN NĂNG LƯỢNG MẶT TRỜI
vYêu cầu:
- Yêu cầu phần cơ khí:
- Kết cấu cơ khí đơn giản và các trục có khả năng tự hảm để đảm bảo độ cứng vững.
- Chuyển động êm, không rung lắc đảm bảo đạt độ chính xác cao khi điều hướng.
- Chịu được gió, bảo.
- Yêu cầu phần điện:
- Mạch điều khiển phải hoạt động ổn định, chạy êm, không xảy ra lỗi trong quá trình làm việc.
- Nguồn điện làm việc: máy sử dụng nguồn điện 12V DC.
- Lựa chọn động cơ và module điểu khiển phải có hiệu suất cao nhưng công suất phải thấp để giảm khả năng tiêu thụ điện của hệ thống điều hướng đến mức thấp nhất
- Chọn pin năng lượng mặt trời và bình ắc quy phù hợp đảm bảo đáp ứng đủ công suất cho hệ thống điều hướng pin năng lượng mặt trời và mô hình thủy canh, địa canh hoạt động liên tục.
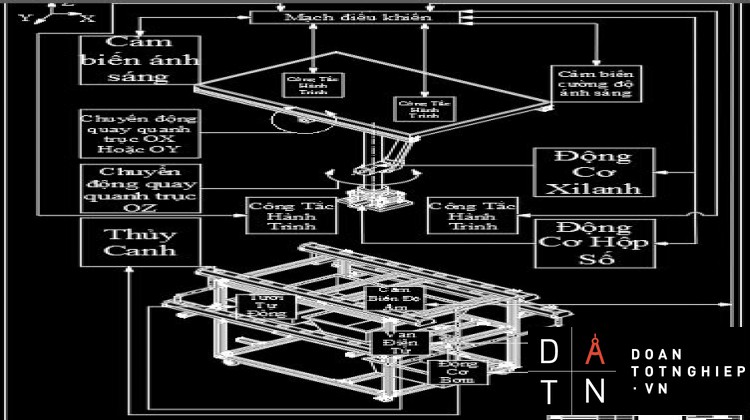
4.2. NGUYÊN LÝ HOẠT ĐỘNG
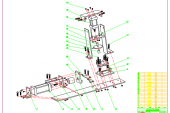
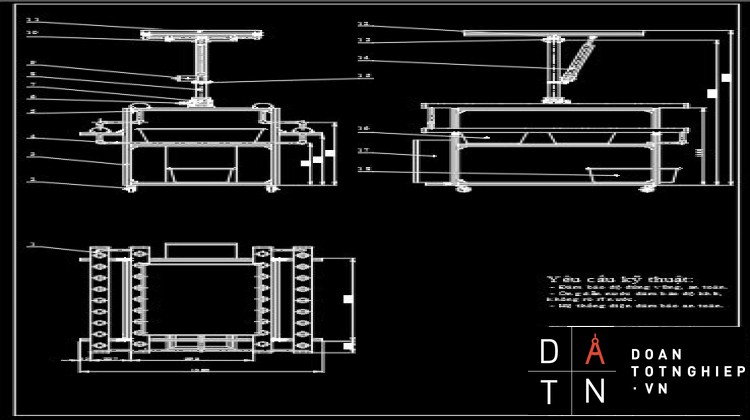
Hình 4.1: Sơ đồ nguyên lý
Khi hệ thống điều hướng được cấp điện, chương trình Arduino sẽ quét một lần kiểm tra các cảm biến và nút nhấn để xác định trạng thái hiện tại.
Hệ thống sẽ hoạt động một trong ba trạng thái sau:
vTrạng thái thứ 1: Ban ngày
- Nếu có ánh nắng, hệ thống sẽ tự nhận biết ánh nắng bằng cảm biến quang trở, thiết bị sẽ tự động dò vị trí mặt trời và điều chỉnh để cho mặt thu bức xạ của tấm pin mặt trời vuông góc với tia sáng của mặt trời. Khi mặt trời di chuyển vị trí khác, hệ thống sẽ tự động nhận biết và thay đổi theo.
vTrạng thái thứ 2: Ban đêm
- Nếu trời không có nắng, hệ thống sẽ tự động chuyển sang chế độ ban đêm và quay về vị trí gốc đã đươc cài đặc và đứng im.
Trạng thái thứ 3: Chế độ chạy tay
- Ở chế độ tay thì trạng thái thứ 1 và thứ 2 sẽ được ngắt hoàn toàn, lúc này cho phép người dùng có thể điều khiển hệ thống xoay quanh trục OZ, OX (hoặc OY) khi có nhu cầu về bảo dưỡng hệ thống.
4.3. THIẾT KẾ, CHẾ TẠO KẾT CẤU CƠ KHÍ
4.3.1. Thiết kế
Từ yêu cầu và nhiệm vụ đề ra, ta chỉ cần dùng hai chuyển động quay quanh hai trục Oz và Ox (hoặc Oy) trong hệ tọa độ Đề Các để điều khiển tấm pin hướng theo mặt trời. Thật vậy,xét trong hệ tọa độ Đề Các trong không gian gắn liền với tấm pin, tấm pin nằm trong mặt phẳng Oxy, gốc O trùng với tâm của tấm pin, giả sử tia sáng từ mặt trời chiếu tới tấm pin hợp với trục Oz một góc α, hình chiếu của tia sáng trên mặt phẳng Oxy hợp với trục Oy góc β. Để tia sáng vuông góc với tấm pin tức là tia sáng vuông góc với mặt phẳng Oxy, ta lần lượt quay hệ tọa độ quanh trục Oz góc β (khi quay quanh trục Oz góc α hợp bởi tia sáng với trục Oz không thay đổi), rồi tiếp tục quay hệ tọa độ quanh trục Ox góc α.
Hình 4.2: Chuyển động quay của hai trục tọa độ
4.3.1.1. Phân tích, lựa chọn cơ cấu truyền động
4.3.1.1.1 Phân tích các cơ cấu truyền động
- BỘ TRUYỀN ĐAI
Hình 4.3: Bộ truyền đai
- Cấu tạo: Gồm có hai chi tiết truyền động dạng đĩa là bánh đai, chuyển động giữa hai bánh đai được truyền qua chi tiết truyền động mềm là dây đai theo nguyên lý ma sát của Euler.
- Ưu điểm:
- Có thể truyền động giữa các trục cách xa nhau (<15m)
- Làm việc êm, không gây ồn nhờ vào độ dẽo của đai nên có thể truyền động với vận tốc lớn
- Nhờ vào tính chất đàn hồi của đai nên tránh được dao động sinh ra do tải trọng thay đổi tác dụng lên cơ cấu.
- Nhờ vào sự trượt trơn của đai nên đề phòng sự quá tải xảy ra trên động cơ
- Kết cấu và vận hành đơn giản
- Nhược điểm:
- Kích thước bộ tuyền đai lớn so với các bộ truyền khác: xích, bánh răng.
- Tỉ số truyền thay đổi do hiện tượng trượt trơn giữa đai và bánh đai (ngoại trừ đai răng)
- Tải trọng tác dụng lên trục và ổ lớn (thường gấp 2-3 lần so với bộ truỵền bánh răng) do phải có lực căng đai ban đầu (tạo áp lực pháp tuyến lên đai tạo lực ma sát)
- Tuổi thọ của bộ truyền tương đối thấp, đặc biệt khi làm việc với vận tốc cao.
- Phạm vi sử dụng:
- Bộ truyền đai được dùng nhiều trong các máy đơn giản. Khi cần truyền chuyển động giữa các trục xa nhau. Kết hợp dùng làm cơ cấu an toàn để bảo vệ động cơ.
- Bộ truyền đai thường dùng truyền tải trọng từ nhỏ đến trung bình. Tải trọng cực đại có thể đến 50 kW.
- Bộ truyền có thể làm việc với vân tốc nhỏ, đến trung bình. Vận tốc thường dùng không nên quá 20 m/s, vận tốc lớn nhất có thể dùng là 30 m/s.
- Tỷ số truyền thường dùng từ 1 đến 3 cho đai dẹt, từ 2 đến 6 cho đai thang. Tỷ số truyền tối đa cho một bộ truyền đai dẹt không nên quá 5, cho bộ truyền đai thang không nên quá 10
- Hiệu suất trung bình trong khoảng 0,92 đến 0,97.
- BỘ TRUYỀN TRỤC VÍT – BÁNH VÍT
Hình 4.4: Bộ truyền trục vít – bánh vít
- Cấu tạo: Hệ thống gồm có một trục ren (gọi là trục vít) với các ren cài vào răng của một chi tiết dạng bánh răng (gọi là bánh vít).
- Ưu điểm:
- Tỉ số truyền lớn.
- Làm việc êm, không ồn.
- Có khả năng tự hãm.
- Có độ chính xác động học cao.
- Tỷ số truyền không thay đổi.
- Tuổi thọ cao, làm việc tin cậy.
- Nhược điểm:
- Chế tạo tương đối phức tạp.
- Đòi hỏi độ chính xác cao.
- Hiệu suất thấp, sinh nhiệt nhiều do có vận tốc trượt lớn.
- Vật liệu chế tạo bánh vít làm bằng kim loại màu để giảm ma sát nên khá đắt tiền.
- Phạm vi sử dụng:
- Chỉ sử dụng cho phạm vi công suất < 60KW
- Có tỉ số truyền lớn nên được sử dụng rộng rãi trong các cơ cấu phân độ
- Có khả năng tự hãm nên thường được sử dụng trong các cơ cấu nâng
- BỘ TRUYỀN XÍCH
Hình 4.5: Bộ truyền xích
- Cấu tạo: Hệ thống gồm có hai chi tiết truyền động có răng tượng tự như bánh răng được đặt cách xa nhau, chuyển động được truyền thông qua một chi tiết truyền động gồm nhiều mắc nối với nhau gọi là xích.
- Ưu điểm:
- Không có hiện tượng trượt như bộ truyền đai, có thể làm việc khi có quá tải đột ngột, hiệu suất cao.
- Không đòi hỏi phải căng xích, nên lực tác dụng lên trục và ổ nhỏ hơn.
- Kích thước bộ truyền nhỏ hơn bộ truyền đai nếu cùng công suất.
- Góc ôm không có ý nghĩa như bộ truyền đai nên có thể truyền cho nhiều bánh xích bị dẫn.
- Nhược điểm:
- Bản lề xích bị mòn nên gây tải trọng động, ồn.
- Có tỉ số truyền tức thời thay đổi, vận tốc tức thời của xích và bánh bị dẫn thay đổi.
- Mau bị mòn trong môi trường có nhiều bụi hoặc bôi trơn không tốt.
- Phạm vi sử dụng:
- Truyền công suất và chuyển động giữa trục có khoảng cách xa, cho nhiều trục đồng thời trong trường hợp n < 500v/p.
- Công suất truyền thông thường N < 100 kW.
- Tỉ số truyền < 6, hiệu suất: (0,950,97)
- Truyền động xích được dùng khá nhiều trong các trong các phương tiện vận tải (xe đap, xe máy, ôtô), máy nông nghiệp, máy công nghiệp và các băng tải…
- Kết luân: Do yêu cầu của hệ thống điều hướng là phải có khả năng tự hãm, chuyển động êm, không rung lắc đảm bảo đạt độ chính xác cao khi điều hướng, kết cấu cơ khí cứng vững chống chịu được gió bảo. Từ những phân tích các bộ truyền trên (Bộ truyền đai, bộ truyền trục vít-bánh vít, bộ truyền xích) thì bộ truyền trục vít-bánh vít là phù hợp nhất và đáp ứng được các yêu cầu đề ra.
4.3.1.1.2. Cơ cấu truyền động của các trục
- Hộp giảm tốc NMRV050
- Chuyển động quay quanh trục Oz được thực hiện thông qua hộp giảm tốc truyền động cơ khí là bộ truyền trục vít bánh vít.Tỉ số truyền 1/50
Hình 4.6: Hộp giảm tốc NMRV050
Thông số kỹ thuật:
- Modun (Mx): 1.54
- Góc vít (Y): 3˚49ʼ
- Tỉ số truyền (i):1/50
- Hiệu suất tĩnh (): 0.35
- Hiệu suất hoạt động (): 0.61
- Trọng lượng: 3.5kg
Hình 4.7: Bảng thông số bộ truyền các loại hộp số của hãng DOLIN
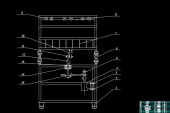
Hình 4.8: Kích thước hộp số NMRV050
- Xilanh điện DTL500 MOVIS
- Chuyển động quay quanh trục Ox được thực hiện bằng xilanh điện DTL500 MOVIS giới hạn hành trình là 500 mm thông qua hai cơ cấu truyền động cơ khí là bộ truyền trục vít bánh vít và bộ truyền vít me đai ốc.
Hình 4.9: Xilanh điện DTL500 của hãng MOVIS
Thông số kỹ thuật:
- Hành trình: 500mm
- Tải trọng: Từ 3000N đến 6000N (300kg – 600kg)
- Tốc độ: Từ 5 mm/s đến 10 mm/s
- Điện áp: 12VDC, 24 VDC
- Nhiệt độ hoạt động: -26 đến 65
Hình 4.10: Kết cấu bên trong của xilanh DTL500
Hình 4.12: Biểu đồ thể hiện Hình 4.13: Biểu đồ thể hiện
tốc độ và tải dòng điện và tải
Hình 4.14: Bảng phân tích điện áp hoạt động ứng với tải và tốc độ
4.3.1.2. Phân tích, lựa chọn động cơ dẫn động cho các trục.
vĐộng cơ một chiều (DC motor)
Hình 4.14: Động cơ một chiều (DC motor)
- Ưu điểm:
- Giá thành rẻ.
- Tốc độ nhanh, động cơ xoay vòng liên tục.
- Dễ điều khiển , driver tương đối đơn giản.
- Nhược điểm:
- Đáp ứng chậm, trong khi mạch điều khiển vị trí và vận tốc lại phức tạp, quay độ không chính xác.
- Khó điều chỉnh tốc độ của động cơ (phải cần có bộ phận điều khiển tốc độ).
- Momen xoắn thấp.
vĐộng cơ bước ( stepping motor)
Hình 4.15: Động cơ bước size 42 Hình 4.16: Động cơ bước size 57
- Ưu điểm:
- Không chổi than: Không xảy ra hiện tượng đánh lửa chổi than làm tổn haonăng lượng, tại một số môi trường đặc biệt (hầm lò...) có thể gây nguy hiểm.
- Tạo được mômen giữ: Một vấn đề khó trong điều khiển là điều khiển động cơở tốc độ thấp mà vẫn giữ được mômen tải lớn. Động cơ bước là thiết bị làm việc tốttrong vùng tốc độ nhỏ. Nó có thể giữ được mômen thậm chí cả vị trí nhờ vào tácdụng hãm lại của từ trường rotor.
- Điều khiển vị trí theo vòng hở: Một lợi thế rất lớn của động cơ bước là ta cóthể điều chỉnh vị trí quay của roto theo ý muốn mà không cần đến phản hồi vị trí nhưcác động cơ khác, không phải dùng đến encoder hay máy phát tốc (khác với servo).
- Độc lập với tải: Với các loại động cơ khác, đặc tính của tải rất ảnh hưởng tớichất lượng điều khiển. Với động cơ bước, tốc độ quay của rotor không phụ thuộc vàotải (khi vẫn nằm trong vùng momen có thể kéo được). Khi momen tải quá lớn gây rahiện tượng trượt, do đó không thể kiểm soát được góc quay.
- Nhược điểm:
- Phạm vi ứng dụng là ở lĩnh vực công suất nhỏ và trung bình, hiệu suất thấp hơn các loại động cơ khác.
- Gây rung động nhỏ.
- Gây ra hiện tượng trượt bước nếu hoat động với tốc độ cao.
- Không có phản hồi nên có thể xảy ra sai số.
vĐộng cơ AC SERVO
Hình 4.17: Động cơ AC SERVO
- Ưu điểm:
- Momen xoắn lớn, tốc độ đáp ứng nhanh, độ chính xác cao.
- Hiệu suất hoạt động cao.
- Không trượt bước khi tải đặt vào động cơ tăng.
- Hoạt động với tốc độ cao tốt.
- Nhược điểm:
- Driver điều khiển khá phức tạp, khó điều khiển và giá thành cao.
- Giá thành cao so với các động cơ khác.
- Khi dừng động cơ sẽ gây rung.
vKết luận:
- Các động cơ có các đặc điểm khác nhau , từ những đặc điểm đó ta sử dụng tùy vào mục đích khác nhau.
- Do yêu cầu của hệ thống điều hướng pin năng lượng mặt trời:
- Nguồn điện hoạt động 12VDC
- Các thiết bị phải có hiệu xuất cao nhưng công xuất phải thấp để tiết kiệm điện.
- Momen xoắn lớn dù hoạt động ở tốc độ thấp , tạo được momen giữ.
- Truyền động chính xác và linh hoạt trong điều khiển.
- An toàn và dễ sử dụng.
- Từ những phân tích các động cơ khác nhau ở trên, cùng với yêu cầu của hệ thống thì việc lựa chọn động cơ bước làm động cơ dẫn động cho hộp giảm tốc thích hợp nhất.
4.4.1.3. Tính toán và chọn động cơ dẫn động cho hộp giảm tốc.
vSơ đồ kết nối động cơ với hộp giảm tốc:
Hình 4.16: Sơ đồ kết nối động cơ với hộp giảm tốc
- Thông số đầu vào:
- Lực kéo của trục tải (Trục II) : F = 150 ( N), (với F = m.g , trong đó m=15kg là khối lượng của hệ thốngđiều hướng pin năng lượng mặt trời, gia tốc trọng trường g=10 m/s² .
- Vận tốc trụ tải : V = 0.02 (m/s)
- Đường kính trục tải (Trục II) : D = 40 (mm)
- Giờ làm việc : Lh= 18000 giờ ( sử dụng 5 năm, 1 ngày 10 giờ)
- Đặc tính làm việc: êm
- Chọn động cơ
- Chọn động cơ điện là giai đoạn đầu tiên trong quá trình tính toán thiết kế máy, vì hộp giảm tốc và động cơ điện biệt lập nên việc chọn đúng động cơ ảnh hưởng rất nhiều đến việc chọn và thiết kế hộp giảm tốc cũng như các bộ truyền ngoài của hộp.
- Chọn động cơ cần tiến hành theo các bước :
- Tính công suất cần thiết của động cơ
- Xác định sơ bộ số vòng quay đồng bộ của động cơ
v Công suất yêu cầu của động cơ:
- Pt: Công suất trên trục công tác ( trục II)
- Pt =
- η : Hiệu suất hệ dẫn động.
- η = ηtᵥ. η³ₒι.η kn
- Trong đó:
- ηᵢᵥ là hiệu suất bộ truyền trục vít
- ηₒι là hiệu suất của ổ lăn
- ηkn là hiệu suất của khớp nối
Tra bảng (2.3)/[trang 19 (tài liệu tính toán thiết kế hệ dẫn động cơ khí tập 1) tác giả GS, TS Trịnh Chất, Lê Văn Uyển ] ta có :
- ηₒι =0.99 ,ηᵢᵥ = 0.75, ηkn =1
η = ηᵢᵥ. η³ₒι. η kn =0.75 x (0.99)³ x 1 = 0.72
⇒ Pct = = = 0.004 (kw)
- Xác định số vòng quay làm vệc:
- nct = = = 9,5 (v/ph)
- Chọn tỉ số truyền sơ bộ:
- Với ikn chọn bằng 1.
- Với itv là hộp giảm tốc 1 cấp lên tra bảng (2.4) [trang 21 (tài liệu tính toán thiết kế hệ dẫn động cơ khí tập 1) tác giả GS, TS Trịnh Chất, Lê Văn Uyển] Ta chọn:
- Tỉ số tryền bộ trục vít : itv = 40
isb =40
v Số vòng quay sơ bộ của động cơ.
- nsb = isb.nct = 40x9.5=380 (v/ph)
v Kết luận
Dựa theo thông số đã được tính ở trên và theo nhu cầu làm việc của cả hệ thống điều khiển pin năng lượng mặt trời, động cơ chọn để dẫn động hộp giảm tốc phù hợp là: Động cơ bước 23HS3401 ( stepping motor type 23HS3401)
- Động cơ bước ( stepping motor)
Hình 4.17: Động cơ bước 23HS3401 size 57
vThông số kỹ thuật
- Momen xoắn giữa là: 2.3 (N.m)
- Bước góc là: 1.8֩
- Cường độ dòng điện: 3A
- Hiệu điện thế: 12V
- Đường kính trục động cơ: D = 8 mm
- Khối lượng động cơ: 1,04 kg
- Phân phối tỉ số truyền:
- Xác định tỉ số truyền it của hệ dẫn động
- Phân phối tỉ số truyền của hệ dẫn động itv tính theo bộ truyền
- Xác định công suất , momen và số vòng quay các trục.
- Xác định tỉ số truyền ich của hệ thống:
- Tỉ số truyền của hệ : ich = ikn.itv = 1.40 =40
- Tính các thông số trên các trục:
- Tính công suất trên trục
- Công suất trên trục II là trục làm việc Pt = 0.003 (kw)
- Trục động cơ bằng với trục I Pct = 0.004 (kw)
- Tính số vòng quay:
- Số vòng quay của động cơ: nđc = 380 (v/ph)
- Số vòng quay của trục I: n1 = nđc.ikn = 380.1= 380 (v/ph)
- Số vòng quay của trục II: nII = nlv = 9.5 (v/ph)
- Tính momen xoắn trên trục:
- Momen xoắn trên trục I (nối với trục động cơ):
Mz1 = = = 100,5 (N.mm)
- Momen xoắn trên trục II:
MzII = = = 3015.7 (N.mm)
- Bảng thông số:
|
Trục Thông số |
Động cơ |
I |
II |
|
|
i |
i=1 |
i=40 |
||
|
n ( v/ph) |
380 |
380 |
9,5 |
|
|
P (kw) |
0,004 |
0,004 |
0,003 |
|
|
Mz (M.mm) |
100,5 |
100,5 |
3015,7 |
|
4.3.1.4.Tính toán thiết kế bộ truyền trục vít – bánh vít
Thiết kế truyền động trục vít bao gồm các bước sau:
- Chọn vật lệu
- Xác định ứng xuất cho phép
- Tính thiết kế
- Tính kiểm nghiệm
- Quyết định lần cuối các kích thước và thông số bộ truyền
- Kiểm nghiệm về nhiệt
vTính toán truyền động trụ vít bánh vít.
- Thông số đầu vào:
- Công suất động cơ Pct= 0.04 (kw)
- Số vòng quay trục nI = 380 (v/ph); nII = 9.5 (v/ph)
- Tỉ số truyền của chung i=itv = 40
- Thời gian làm việc Lh = 18000 (h)
- Chọn vật liệu làm trục vít bánh vít:
- Xác định sơ bộ vận tốc trược:
Vt= 4.5..nI. = 4.5. .380. = 0.24 (m/s)
- Với Vt = 0.24 (m/s) < 2 (m/s) ,lên bánh vít được làm bằng gang xám .
Tra bảng 7.1/) [trang 146 (tài liệu tính toán thiết kế hệ dẫn động cơ khí tập 1) tác giả GS, TS Trịnh Chất, Lê Văn Uyển] ta có:
- Vật liệu bánh vít : Gang xám
- Ký hiệu Сч15-32
- Cách đúc: dùng khuôn cát
- σb = 150 (MPa)
- σbu = 320 (MPa)
Với tải trọng nhỏ và vận tốc trượt thấp nên ta chọn vật liêu trục vít là: Thép 45 , được tôi cải thiện với độ rắn thấp hơn ( HB< 350) và không mài
- Xác định ứng suất cho phép của bánh vít [σtx]
a) Ứng suất tiếp xúc cho phép:
Tra bảng 7.2/ [trang 148 (tài liệu tính toán thiết kế hệ dẫn động cơ khí tập 1) tác giả GS, TS Trịnh Chất, Lê Văn Uyển]
với Vt = 0.46 (m/s) →[ σtx] =110 (N/mm²)
b) Ứng suất uốn cho phép:
- Vì bánh răng làm việc hai mặt : [σu] = 0.075. σbu
Tra bảng 7.1/ [trang 146 (tài liệu tính toán thiết kế hệ dẫn động cơ khí
tập 1) tác giả GS, TS Trịnh Chất, Lê Văn Uyển]
[ σu] = 0.075x320 = 24 (N/mm²)
- Chọn số đầu mối ren Z1 và tính số răng Z2:
Chọn Z1 = 1 => Z2 = itv.Z1 = 40.1 = 40
- Chọn sơ bộ hiệu suất