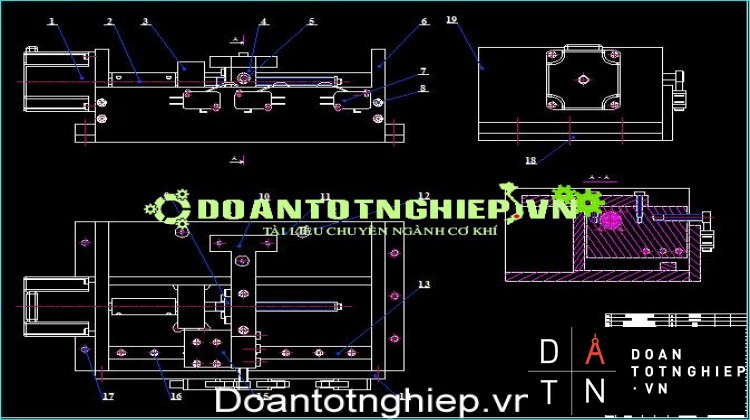
THIẾT KẾ MÁY ĐO KIỂM TRA KÍCH THƯỚC

NỘI DUNG ĐỒ ÁN
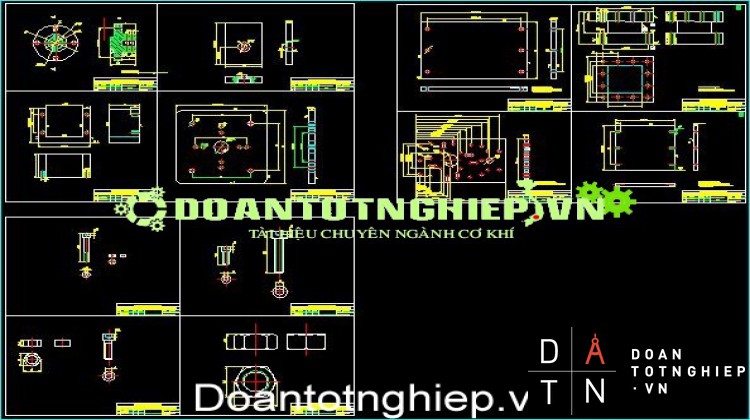
THIẾT KẾ MÁY ĐO KIỂM TRA KÍCH THƯỚC , thuyết minh, động học máy, kết cấu máy, nguyên lý máy, cấu tạo máy, quy trình sản xuất
Trong xã hội văn minh hiện nay, các thiết bị đo lường được sử dụng rất rộng rãi và không thể thiếu trong các ngành thuộc các lĩnh vực khoa học kĩ thuật. Tuy nhiên các loại thiết bị đo thông thường mà chúng ta hay dùng hiện nay lại có những nhược điểm và hạn chế gây phiền toái cho người dùng, đó là dụng cụ đo như thước cặp hoặc pan-me như thông thường thì mỗi lần cần đo kích thước của một chi tiết nào đó thì cần rất nhiều tác động của con người, vì vậy mà dùng thước đo thông thường làm tốn nhiều thời gian và điều quan trọng hơn liên quan đến chuyên ngành là sự chính xác về kích thước sau khi đo của chi tiết.
Việc thiết kế ra một dụng cụ đo kiểm tiện lợi, chính xác hơn, phục vụ tốt hơn cho đời sống của con người trong thời điểm xã hội ngày càng hiện đại và phát triển hiện nay là tất yếu và vô cùng cần thiết. Vì vậy cần thiết kế ra một loại dụng đo kích thước tự động nhằm khắc phục những nhược điểm tốt của dụng cụ đo thông thường.
Do đó, khi sử dụng thiết bị đo tự động này, người dùng không phải tác động hoàn toàn vào quá trình đo mà vẫn có được kích thước cần đo của chi tiết. Với tính năng này, thiết bị đo tự động sẽ mang lại những thuận lợi lớn cho người sử dụng.
Khi sử dụng thiết bị đo tự động, người dùng rõ ràng đã đỡ tốn một khoảng thời gian để đo kiểm một chi tiết tức là tiết kiệm một khoảng thời gian dù là rất nhỏ nhưng cũng có thể rất cần thiết trong nhịp sống công nghiệp hiện nay.
Nếu chỉ sử dụng thiết bị trong quá trình đo kiểm với số lượng đơn chiếc thì thực sự chưa thấy hết sự tiện lợi của thiết bị, chính vì vậy khi ta đem ứng dụng của nó vào trong sản xuất hàng loạt ví dụ như đo độ kích thước đạt tiêt chuẩn của một sản phẩm nào đó trước khi đóng hàng thành phẩm.
Chính vì những ưu điểm của thiết bị đo tự động mà chúng ta cần phải phát triển ứng dụng nó rộng rãi hơn, đồng thời nghiên cứu để cải tiến, nâng cao chất lượng hoạt động của thiết bị đo để nó ngày càng hiện đại hơn, tiện ích hơn.
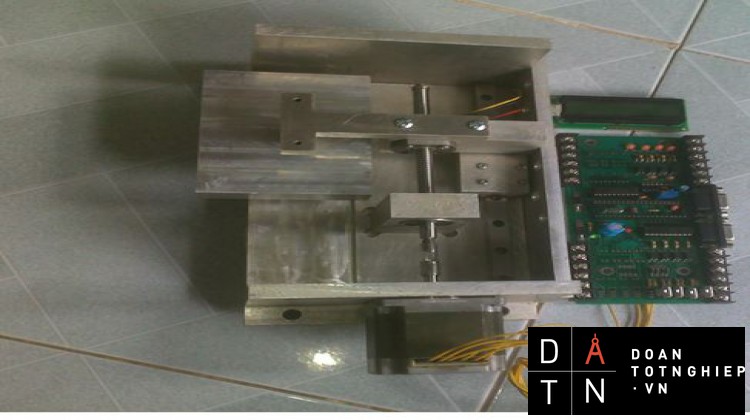
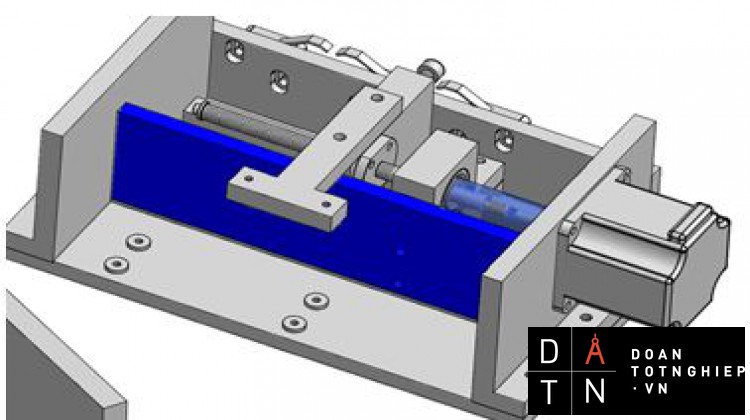
Để nghiên cứu một cách chính xác và cụ thể về thiết bị đo tự động này, cần phải chế tạo ra mô hình, mô tả hoạt động, hình dạng, cấu tạo của thiết bị đo. Từ đó ta có thể quan sát và tìm hiểu hoạt động, cũng như thấy được những khó khăn có thể gặp phải khi chế tạo chúng trên thực tế. Cũng từ mô hình có thể thấy được ưu nhược điểm mà từ đó khắc phục những hạn chế, phát huy thế mạnh thiết kế thiết bị ưu việt hơn, hiện đại và hoàn thiện hơn cho con người.
CHƯƠNG 1.1. MỘT SỐ DỤNG CỤ ĐO THÔNG DỤNG
- Thước cặp
Các loại thước cặp là loại dụng cụ thường được sử dụng trong việc đo kích thước trong rất nhiều các lĩnh vực, loại thước này có ưu đểm là tiện lợi, nhỏ gọn, dễ sử dụng, và giá thành cũng rẻ hơn so với các dụng cụ đo kiểm khác. Nhược điểm của thước cặp du xích là chỉ có thể đo được các chi tiết với độ chính xác không cao.
Hình 1.2. Thước cặp đồng hồ
Dụng cụ đo kiểu thước cặp gồm các loại thước cặp thông thường để đo trong, đo ngoài, thước cặp đo răng và các loại thước cặp đo cao dùng để đo cao và lấy dấu. Dụng cụ này gồm hai phần cơ bản: thân thước mang thước chính gắn với đầu đo cố định và thước động mang thước phụ còn gọi là du xích, gắn với đầu đo động. Khoảng cách giữa hai đầu đo là kích thước đo được đọc phần nguyên trên thước chính và phần lẻ trên thước phụ. Điểm “0” của thước phụ là vật chỉ thị để đọc giá trị trên thước chính, sau đó quan sát thấy hai vạch nào trên thước chính và thước phụ trùng nhau thì vạch chia trên thước chính sẽ chỉ cho ta số đọc phần lẻ trên thước phụ.
Nói chung thước chính có giá trị chia độ là 1mm. giá trị chia của thước là giá trị chia của thước phụ, giá trị này phụ thuộc vào cấu tạo của từng thước, cơ bản là độ lớn của khoảng chia và số vạch chia trên thước phụ. Gọi khoảng chia trên thước chính là a, nếu muốn có giá trị chia trên thước phụ là c thì vạch chia trên thước phụ sẽ là n với:
Máy đo tọa độ CMM (thường gọi là máy CMM, tên Tiếng Anh là Coordinate Measuring Machine) là một thiết bị đo vạn năng, xác định được các thông số hình học theo phương pháp tọa độ. Máy CMM hoạt động theo 3 chế độ: quét tiếp xúc, quét tiếp xúc gián đoạn và quét không tiếp xúc. Đặc biệt, chế độ quét mẫu không tiếp xúc là điểm nổi bậc về công nghệ CMM. Đầu quét là hệ thống laser và các sensors, có thể ghi nhận được thông tin kích thước phức tạp của các mẫu vật như mặt cắt, động cơ máy, các hốc tuabin,…bằng 3 đường tia laser quét kết hợp cùng lúc (dẫn đầu công nghệ tiên tiến này là duy nhất hãng Nikon Metrology).
1.2.2. Lĩnh vực ứng dụng
Máy đo tọa độ CMM là một thiết bị đo lường tiên tiến không thể thiếu trong ngành Công nghiệp Cơ khí chế tạo (Máy bay, Ô tô, Xe máy,..), ngành Gia công chế tạo khuôn mẫu, ngành Chế tạo đồ điện tử dân dụng, ngành Thiết bị chính xác, Thiết bị y tế, ngành Nhựa và gia công các loại,…
Nhìn chung thì các máy đo hiện đại thường được sử dụng trong các nhà máy lớn nhằm đạt năng suất và chất lượng sản phẩm. Các máy đo hiện đại có những ưu điểm rất nổi bật, đo kích thước chi tiết với độ chính xác rất cao nhờ ứng dụng các phương pháp đo hiện đại, có thể đo được các chi tiết có kích thước tương đối lớn hoặc cũng có thể đo các chi tiết rất nhỏ với độ chính xác cao hơn các dụng cụ đo thông thường. Đặc biệt là tăng năng suất trong quá trình sản xuất giảm tối ưu thời gian và sự tham gia của con người. Nhưng ngược lại với những ưu điểm đó thi các thiết bị này có giá thành rất cao, khối lượng tương đối lớn gây khó khăn trong việc di chuyển và đòi hỏi người sử dụng phải có chuyên môn cao.
CHƯƠNG 2.1. MỘT SỐ CHI TIẾT CHÍNH CỦA THIẾT BỊ
2.1.1. Thanh trượt bi
2.1.1.1. Khái niệm và cấu tạo
Thanh trượt bi là một chi tiết có sự chuyển động tịnh tiến dựa trên ma sát lăn của các viên bi được gắn bên trong bao gồm bộ phận chính cấu tạo thành là thanh dẫn hướng, băng trượt trên ngoài ra còn có các viên bi nhỏ. Do sử dụng những phần tử lăn giữa thanh ray với khối tịnh tiến, sống lăn có thể chuyển động tịnh tiến với độ chính xác cao. Hệ số ma sát của sống lăn chỉ bằng 1/50 so với sống trượt truyền thống. Sống lăn có thể chịu tải trọng lên, xuống, trái, phải.
- Nguyên lý hoạt động
Chuyển động chính ở đây là chuyển động tịnh tiến giữa băng trượt ở trên trượt trên thanh dẫn hướng ở dưới, băng trượt có thể trượt một cách nhẹ nhàng, êm và trơn nhờ các bi tròn bên trong. Trên thanh dẫn hướng có hai rãnh hai bên kết hợp với ống dẫn bi bên trong băng trượt trên là nơi các viên bi có thể lăn và chuyển động luân hồi (như hình bên).
2.1.1.3. Ưu điểm của thanh trượt bi
- Độ chính xác vị trí cao.
- Hoạt động chính xác cao trong thời gian dài.
- Đạt vận tốc cao với lực tác dụng nhỏ.
- Có khả năng chịu lực từ mọi hướng.
- Dễ lắp đặt.
- Bôi trơn dễ dàng.
- Có khả năng lắp lẫn cao.
2.1.1.4. Ứng dụng của thanh trượt bi
Thanh trượt bi được ứng dụng rất nhiều trong các lĩnh vực, đặc biệt là các ngành kỹ thuật nhờ vào sự truyền tải với độ chính xác cao, sử dụng ở các máy công cụ, máy cắt công suất lớn, máy mài, máy ép, các thiết bị tự động, các thiết bị có tốc độ cao, sử dụng ở máy tiện CNC, máy cắt gọt chính xác, các thiết bị di chuyển và cũng gắn liền với công nghệ chế tạo rô bốt thuộc lĩnh vực điện tự động.
- Vít me đai ốc bi
- Khái niệm
Vít me đai ốc bi là bộ truyền chuyển động dùng để biến đổi chuyển động quay thành chuyền động tịnh tiến. Trong bộ truyền visme – đai ốc với ma sát lăn giữa các bề mặt làm việc vít và đai ốc là các con lăn bằng thép. Bộ truyền này hiện nay sử dụng rộng rãi. Đặc biệt trong các cơ cấu chuyển động chính xác, hệ thống điều khiển và các bộ truyền lực quan trọng (ví dụ trong máy điều khiển chương trình số). Hiệu suất cao, lực ma sát phụ thuộc vào vận tốc, trên vít và đai ốc có các rãnh xoắn ốc và các con lăn sẽ lăn trên rãnh này. Chiều dài làm việc khoảng 2-3 m, tối đa 7-8m, đường kính con lăn khoảng 0.6 bước ren.
Biên dạng ren cặp ren vít với ma sát lăn bao gồm rãnh tròn và rãnh tam giác. Phổ biến nhất là rãnh tròn, bán kính rãnh lớn hơn bán kính con lăn 3- 5%, góc tiếp xúc 450 rãnh tam giá chế tạo khó nhưng tạo độ căng ban đầu
Các con lăn quay và chuyển động tịnh tiến đối với vít và đai ốc, do đó để luôn tồn tại các con lăn giữa các bề mặt ren của vít và đai ốc thì trên các đầu đai ốc hoặc vít người ta nối các rãnh thu hồi.
Bộ truyền vít me đai ốc bi gồm có trục visme, đai ốc bi chuyển động tịnh tiến trên trục visme.
2.1.2.2. Cấu tạo và nguyên lí hoạt động
Rãnh thu hồi có thể nằm trên đai ốc hoặc vít, ở đây là hình rãnh thu hồi năm trên đai ốc, cặp ren vít với vít chuyển động quay, rãnh thu hồi và đai ốc chuyển động tịnh tiến, ngoài ra còn có cái chặn để còn lăn chuyển từ vùng làm việc về rãnh thu hồi
Trên hình là kết cấu bộ truyền vít – đai ốc ma sát lăn với rãnh thu hồi nằm trên đai ốc chuyển động tịnh tiến, các con lăn nằm giữa bề mặt vít và đai ốc. Đai ốc bao gồm vỏ ngoài và một ống lót, khi quay trục vít các con lăn đi qua vùng làm việc của ren nằm trên đai ốc gặp chặn và được đẩy lên rãnh thu hồi nằm trên đai ốc lăn qua rãnh thu hồi này và một lần nữa qua chặn thứ hai và rơi vào vùng làm việc.
- Ưu điểm:
- Ứng suất tiếp xúc nhỏ.
- Không có khe hở giữa vít me và đai ốc.
- Ma sát nhỏ
- Hiệu suất cao
- Nhược điểm:
- Giá thành cao, khó chế tạo, đặc biệt là đối với trục vít me có kích thước lớn.
- ..............................................................
....................................................................................
Khi thiết lập RS=1, R/W=1,dữ liệu từ CG/DDRAM được chuyển ra MPU thông qua các chân DBx (địa chỉ và vùng RAM đã được xác định bằng lệnh ghi địa chỉ trước đó).
Sau khi đọc, AC tự động tăng/giảm 1 tùy theo thiết lập Entry mode, tuy nhiên nội dung hiển thị không bị dịch bất chấp chế độ Entry mode. Chi tiết hơn về giao thức đọc dữ liệu, xin xem hình 11.
- Giao tiếp giữa LCD và CPU
- Đặc tính điện của các chân giao tiếp :
LCD sẽ bị hỏng nghiêm trọng, hoặc hoạt động sai lệch nếu bạn vi phạm khoảng đặc tính điện sau đây:
|
Chân cấp nguồn (Vcc-GND) |
Min:-0.3V , Max+7V |
|
Các chân ngõ vào (DBx,E,…) |
Min:-0.3V , Max:(Vcc+0.3V) |
|
Nhiệt độ hoạt động |
Min:-30C , Max:+75C |
|
Nhiệt độ bảo quản |
Min:-55C , Max:+125C |
Bảng 6 : Maximun Rating
Đặc tính điện làm việc điển hình: (Đo trong điều kiện hoạt động Vcc = 4.5V đến 5.5V, T = -30 đến +75C).
|
Chân cấp nguồn Vcc-GND |
2.7V đến 5.5V |
|
Điện áp vào mức cao VIH |
2.2V đến Vcc |
|
Điện áp vào mức thấp VIL |
-0.3V đến 0.6V |
|
Điện áp ra mức cao (DB0-DB7) |
Min 2.4V (khi IOH = -0.205mA) |
|
Điện áp ra mức thấp (DB0-DB7) |
Max 0.4V (khi IOL = 1.2mA) |
|
Dòng điện ngõ vào (input leakage current) ILI |
-1uA đến 1uA (khi VIN = 0 đến Vcc) |
|
Dòng điện cấp nguồn ICC |
350uA(typ.) đến 600uA |
|
Tần số dao động nội fOSC |
190kHz đến 350kHz (điển hình là 270kHz) |
Bảng 7: Miền làm việc bình thường
- Sơ đồ nối mạch điển hình:
- Sơ đồ mạch kết nối giữa mô đun LCD và VĐK 89S52 (8 bit).
Sơ đồ mạch kết nối giữa môđun LCD và VĐK (4 bit)
MỤC LỤC
LỜI MỞ ĐẦU…………………………………………………….......…..….….Trang 1
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN………………….............……….Trang 3
LỜI CẢM ƠN……………………………………………………….........………Trang 4
PHẦN I: ĐẠI CƯƠNG VỀ ĐO LƯỜNG ……………………………..................Trang 6
Chương 1.1. Một số dụng cụ đo thông dụng……………………………...Trang 7
Chương 1.2. Các máy đo lường hiện đại………………………………….Trang 10
PHẦN II: TỔNG QUAN VỀ ĐỒ ÁN……………………………………............. Trang 13
Chương 2.1 Một số chi tiết chính của thiết bị…………………………….Trang 14
- Thanh trược bi……………………………………………...……....Trang 14
- Vít me đai óc bi……………………………………………..……....Trang 15
- Động cơ bước……………………………………………………...Trang 19
- Màn hình LCD ……………………………………………....……....Trang 24
Chương 2.2 Tìm hiểu về cảm biến……………………………………….....Trang 48
- Các loại cảm biến ……………………………………………...….Trang 48
- Cơ sở tính toán trên PLC …………………………………..…….Trang 55
PHẦN III: MÔ HÌNH…………………………………………………......…….Trang 70
PHẦN IV: KẾT LUẬN……………………………………………….....……...Trang 75
Tài liệu tham khỏa…………………………………………………………...Trang77