ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử CẢI TIẾN THIẾT KẾ THANG MÁY 6 TẦNG 2 CABIN



NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử CẢI TIẾN THIẾT KẾ THANG MÁY 6 TẦNG 2 CABIN
MỞ ĐẦU
Trong công cuộc đổi mới đất nước, với mục tiêu chiến lược Công nghiệp hóa –Hiện đại hoá đất nước, đưa nền kinh tế phát triển với tốc độ cao nhằm nhanh chóng sánh vai cùng các quốc gia tiên tiến trên thế giới, lĩnh vực Tự Động Hoá Công Nghiệp ngày càng chứng tỏ vai trò không thể thiếu được.
Không chỉ phục vụ trong công nghiệp hóa, lĩnh vực tự động hóa còn thể hiện bản chất của một nước hiện đại. Cùng với sự phát triển của đất nước, ngày càng xuất hiện nhiều công trình xây dựng cao tầng đồ sộ: những cao ốc thương mại, nhà hàng, khách sạn hiện đại theo tiêu chuẩn quốc tế, và cả những siêu thị, bệnh viện đều có xu hướng “phát triển theo chiều cao”. Đó là một qui luật phát triển hiển nhiên. Đi đôi với sự phát triển này là nhu cầu về thiết bị chuyển tải hàng hoá và con người theo “độ cao”. Thiết bị hiện đại đó chính là Thang máy.
Đề tài thang máy đã được các anh chị khóa trước làm cũng khá nhiều, nhưng cùng với sự phát triển của các công trình xây dựng cao tầng đồ sộ, thang máy cũng ngày càng thay đổi. Chẳng hạn như: trước kia dùng công tắc hành trình để nhận biết dừng đúng tầng, thì hiện nay người ta dùng tế bào quang điện, dùng ENCODER _được gắn vào trục quay _ đọc số xung của ENCODER xuất ra , xử lý để biết được vị trí của thang và điều khiển thang…
Thang máy phục vụ con người, tải hàng hoá, một phần thể hiện bộ mặt hiện đại của một đất nước. Chính vì vậy, nó có vai trò không kém phần quan trọng. Nó quyết định giờ giấc làm việc, năng suất lao động, và rất tiện lợi cho việc di chuyển lên xuống ở các toà nhà cao tầng….
Hiện nay ngành thang máy với trang thiết bị ngoại nhập ở mức hợp tác với nước ngoài lắp đặt các thang máy với trang thiết bị ngoại nhập. Trong tương lai, em tin tưởng rằng nó sẽ phát triển hơn nữa. Đó là lý do em xin được nghiên cứu về “điều khiển thang máy”.
MỤC LỤC
Chương 1: TỔNG QUAN VỀ THANG MÁY................................................................ 9
- Giới thiệu chung về thang máy................................................................................. 9
- Khái niệm chung về thang máy............................................................................. 9
- Sơ lược lịch sử phát triển....................................................................................... 9
- Phân loại thang máy................................................................................................ 10
- Chức năng của một số bộ phận trong thang máy................................................ 11
- Các yêu cầu đối với thang máy................................................................................. 13
- Yêu cầu về an toàn trong điều khiển thang máy................................................ 13
- Dừng chính xác buồng thang................................................................................. 13
- ảnh hưởng của tốc độ, gia tốc và độ giật đối với hệ truyền động thang máy. 14
- Các yêu cầu đối với hệ thống truyền động điện thang máy.............................. 14
- Các yêu cầu chọn công suất động cơ truyền động thang máy......................... 15
Chương 2: GIỚI THIỆU VỀ PLC................................................................................... 16
2.1 Khái niệm về PLC....................................................................................................... 16
- Lịch sử phát triển......................................................................................................... 16
- Cấu trúc cơ bản của PLC........................................................................................... 17
- Thông số PLC CPM1A sử dụng trong đề tài.......................................................... 19
2.4.1Các địa chỉ bộ nhớ (address) trong PLC................................................................. 19
2.4.2Các vùng nhớ (memory areas) trong CPM1........................................................... 20
- Các phương pháp lập trình........................................................................................ 22
- Lập trình bằng programming console.................................................................. 22
- Lập trình bằng sơ đồ bậc thang ladder diagram................................................... 23
- Một số lệnh lập trình phổ biến khác của PLC OMRON...................................... 30
- Bộ định thời – TIMER............................................................................................ 30
- Bộ đếm COUNTER................................................................................................. 30
- Mở rộng khả năng của TIMER.............................................................................. 31
- Lập trình bằng phần mềm SYSWIN trên máy tính.............................................. 32
- Khởi động Lập chương trình với SYSWIN.......................................................... 32
- Nạp chương trình vào PLC (Download program to PLC).................................. 34
- Chạy chương trình................................................................................................... 34
- Đọc chương trình từ PLC (Upload program from PLC)..................................... 34
CHƯƠNG 3: THIẾT KẾ VÀ THI CÔNG..................................................................... 35
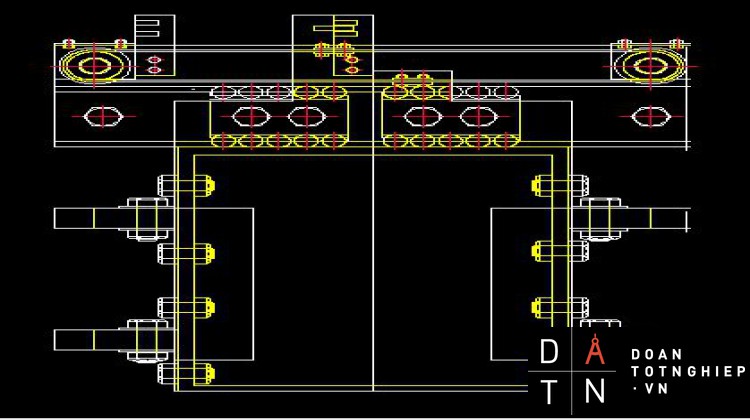
3.1 Cơ khí……… .............................................................................................................. 35
3.2 Điện – điện tử .............................................................................................................. 39
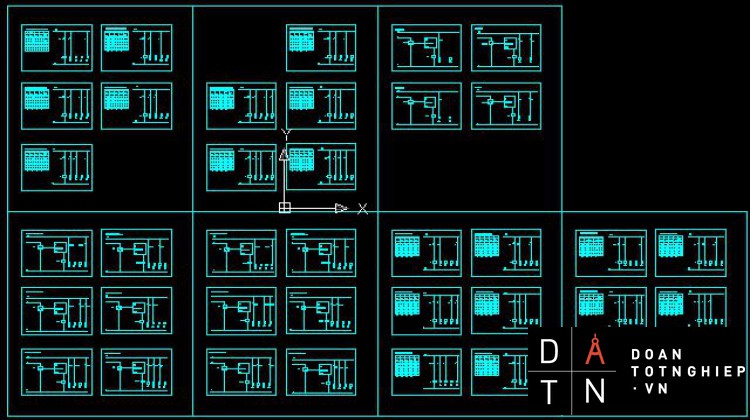
3.2.1Sơ đồ mạch.................................................................................................................. 39
3.2.2Giới thiệu một số linh kiện điện tử.......................................................................... 43
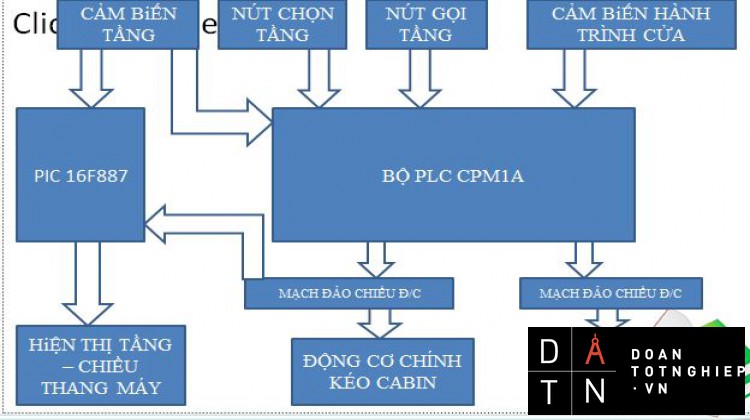
3.3Lập trình PLC Thang máy 6 tầng 2 cabin............................................................... 49
3.3.1 các bước lập trình...................................................................................................... 49
3.3.2 Gán các địa chỉ đầu vào........................................................................................... 50
3.3.3 Gán các địa chỉ đầu ra
3.3.4 Gán các bit nhớ nội và sơ đồ bố trí sensor
3.3.5 chương trình lập trình theo bằng sơ đồ bậc thang ladder diagram

DANH MỤC CÁC BẢNG, SƠ ĐỒ, HÌNH
Hình 2.1: PLC OMRON CPM1A-20DCR-A-V1 ............................................................ 19
Hình 2.2: bàn phím lập trình cầm tay cho PLC của OMRON....................................... 22
Hình 3.1: khung ngoài mô hình tòa nhà 7 tầng............................................................... 35
Hình 3.2: cấu tạo cabin...................................................................................................... 36
Hình 3.3: khoang thang máy ............................................................................................. 37
Hình 3.4: cửa tầng .............................................................................................................. 37
Hình 3.5: Thang bộ............................................................................................................. 39
Hình 3.6: ròng rọc kéo cabin............................................................................................. 39
Hình 3.8: sơ đồ nguyên lý mạch nguồn........................................................................... 40
Hình 3.9 : Sơ đồ nguyên lý mạch cảm biến .................................................................... 40
Hình 3.10: sơ đồ nguyên lý mạch vi điều khiển............................................................. 41
Hình 3.11: Sơ đồ nguyên lý hiện thị led đơn................................................................. 42
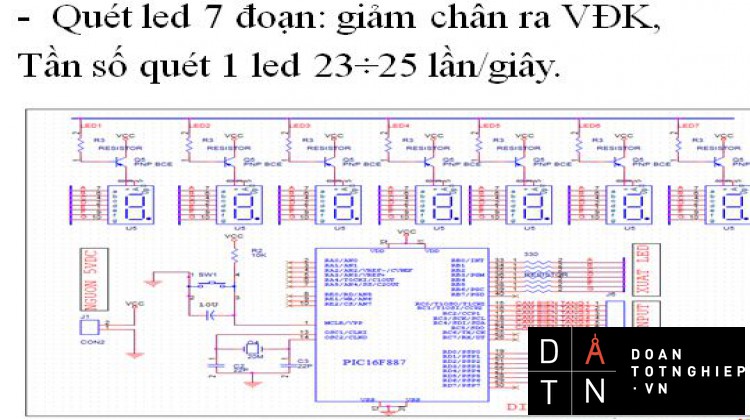
Hình 3.12: Sơ đồ nguyên lý hiện thị led 7 đoạn ............................................................ 43
Hình 3.13 : sơ đồ mạch đảo chiều động cơ .................................................................... 43
Hình 3.14: Sơ đồ nguyên lý PIC 16F887 ........................................................................ 44
Hình 3.15: Cảm biến GP1A05........................................................................................... 47
Hình 3.16: cấu tạo Cảm biến GP1A05............................................................................. 48
Hình 3.17: Led đơn ............................................................................................................ 48
Hình 3.20: IC 74HC595 ..................................................................................................... 49
Hình 3.19: Cấu tạo led 7 đoạn .......................................................................................... 49
Hình 3.18: Led 7 đoạn ....................................................................................................... 49
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử CẢI TIẾN THIẾT KẾ THANG MÁY 6 TẦNG 2 CABIN
Chương1: TỔNG QUAN VỀ THANG MÁY
- Giới thiệu chung về thang máy
1.1.1 Khái niệm chung về thang máy
Thang máy là một thiết bị chuyên dùng để dùng vận chuyển người, hàng hoá, vật liệu v.v… theo phương thẳng đứng hoặc nghiêng một góc nhỏ hơn 150 so với phương thẳng đứng một tuyến đã định sẵn.
Thang máy thường được dùng trong các khách sạn, công sở, chung cư, bệnh viện, và các đài quan sát, tháp truyền hình trong các nhà máy, công xưởng đặc điểm vận chuyển bằng thang máy so với các phương tiện vận chuyển khác là thời gian một chu kỳ vận chuyển bé, tần suất vận chuyển lớn, đóng mở liên tục.
Nhiều quốc gia trên thế giới đã quy định, đối với các nhà cao 6 tầng trở lên đềuphải được trang bị thang máy để đảm bảo cho người đi lại thuận tiện, tiết kiệm thờigian và tăng năng suất lao động. Đối với những công trình như bệnh viện, nhàmáy, khách sạn v.v. tuy số tầng nhỏ hơn 6 nhưng do yêu cầu phục vụ vẫn phảiđược trang bị thang máy.
Thang máy là một thiết bị vận chuyển đòi hỏi tính an toàn nghiêm ngặt, bởi nóliên quan trực tiếp đến tài sản và tính mạng con người nên nó phải thỏa mãn yêucầu về an toàn được quy định trong các tiêu chuẩn, quy trình, quy phạm.
- Sơ lược lịch sử phát triển
Cuối thế kỷ thứ 19, trên thế giới mới chỉ có một vài hãng thang máy ra đời như:OTIS; Schindler. Chiếc thang máy đầu tiên đã được chế tạo và đưa vào sử dụngcủa hãng OTIS (Mỹ) năm 1853. Đến năm 1874, hãng thang máy Schindler (ThụySĩ) cũng đã chế tạo thành công những thang máy khác. Lúc đầu bộ tời kéo chỉ cómột tốc độ, cabin có kết cấu đơn giản, cửa tầng đứng bằng tay, tốc độ di chuyểncủa cabin thấp.
Đầu thế kỷ thứ 20, có nhiều hãng thang máy khác ra đời như KONE (PhầnLan), MISUBISHI, NIPON, ELEVATOR, ... (Nhật Bản), THYSEN (Đức),SABIEM (Ý)... đã chế tạo các loại thang máy có tốc độ cao, tiện nghi trong cabintốt hơn và êm hơn.
Vào đầu những năm 1970, thang máy đã chế tạo đạt tới tốc độ 7.5 m/s,nhữngthang máy chở hàng đã có tải trọng tới 30 tấn đồng thời cũng trong khoảng thờigian này cũng có các thang máy thuỷ lực ra đời. Sau một khoảng thời gian rất ngắnvới tiến bộ của các ngành khoa học khác, tốc độ thang máy đã đạt tới 10m/s. Vàonhững năm 1980, đã xuất hiện hệ thống điều khiển động cơ mới bằng phương phápbiến đổi điện áp và tần số (inverter). Thành tựu này cho phép thang máy hoạt độngêm hơn, tiết kiệm được khoảng 40% công suất động cơ.
Vào đầu những năm 1990, trên thế giới đã chế tạo những thang máy có tốc độđạt tới 12.5 m/s và các thang máy có các tính năng kỹ thuật khác.
Như đã trình bày ở trên, trước đây thang máy ở Việt Nam đều do Liên Xô cũ vàmột số nước Đông Âu cung cấp. Chúng được sử dụng để vận chuyển trong côngnghiệp và chở người trong các nhà cao tầng. Tuy nhiên số lượng còn rất khiêm tốn.Trong những năm gần đây, do nhu cầu thang máy tăng mạnh, một số hãng thangmáy đã ra đời nhằm cung cấp, lắp đặt thiết bị thang máy theo hai hướng là:
+Nhập thiết bị toàn bộ của các hãng nước ngoài, thiết bị hoạt động tốt, tincậy nhưng với giá thành rất cao.
+Trong nước tự chế tạo phần điều khiển và một số phần cơ khí đơn giản khác.
Bên cạnh đó, một số hãng thang máy nổi tiếng ở các nước đã giới thiệu và bánsản phẩm của mình vào Việt Nam như : OTIS (Hoa Kỳ), NIPPON, MISUBISHI(Nhật Bản), HUYNDAI (Hàn Quốc). Về công nghệ thì các hãng luôn đổi mới cònmẫu thì phổ biến ở hai dạng:
-Hệ thống truyền động dùng động cơ điện với đối trọng thông thường.
-Hệ thống nâng hạ buồng thang bằng thuỷ lực.
Các hệ thống thang máy truyền động bằng động cơ điện hiện đại phổ biến làdùng kỹ thuật vi xử lý kết hợp với điều khiển vô cấp tốc độ động cơ điện.
- Phân loại thang máy
Thang máy hiện nay đã được thiết kế và chế tạo rất đa dạng, với nhiều kiểu, loạikhác nhau để phù hợp với mục đích của từng công trình. Có thể phân loại thang máy theo nguyên tắc và các đặc điểm sau:
- Theo công dụng thang máy được phân thành 5 loại:
1, Thang máy chuyên chở người: Loại này chuyên vận chuyển hành kháchtrong các khách sạn, công sở, các khu chung cư, trường học, tháp truyền hình.v.v.
2, Thang máy chuyên chở người có tính đến hàng đi kèm: Loại này thườngdùng cho các siêu thị, khu triển lãm.v.v
3, Loại máy chuyên chở bệnh nhân: Loại này chuyên dùng cho các bệnh viện,các khu điều dưỡng.... Đặc điểm của nó là kích thước cabin phải đủ lớn để chứabăng ca (cáng) hoặc giường của bệnh nhân, cùng với các bác sĩ, nhân viên và cácdụng cụ cấp cứu đi kèm. Hiện nay trên thế giới đã sản xuất theo cùng tiêu chuẩnkích thước và tải trọng cho loại thang máy này.
4, Thang máy chuyên chở hàng có người đi kèm: Loại thường dùng cho các nhàmáy, công xưởng, kho, thang máy dùng cho nhân viên khách sạn v.v... chủ yếu đểchở hàng nhưng có người đi kèm để phục vụ.
5, Thang máy chuyên chở hàng không có người đi kèm: Loại chuyên dùng đểchở vật liệu, thức ăn trong các khách sạn, nhà ăn tập thể v.v... Đặc điểm của loạinày chỉ có điều khiển ngoài cabin (trước các cửa tầng). Còn các loại thang máykhác nêu ở trên vừa điều khiển trong cabin vừa điều khiển ngoài cabin.
Ngoài ra còn có các loại thang máy chuyên dùng khác như: thang máy cứu hoả,chở ôtô v.v...
- Theo hệ thống dẫn động cabin
1, Thang máy dẫn động điện: Loại này dẫn động cabin lên xuống nhờ động cơđiện truyền qua hộp giảm tốc tới puly ma sát hoặc tang cuốn cáp. Chính nhờ cabinđược treo bằng cáp mà hành trình lên xuống của nó không bị hạn chế. Ngoài ra còncó loại thang máy dẫn động cabin lên xuống nhờ bánh răng thanh răng (Chuyêndùng để chở người phục vụ xây dựng các công trình cao tầng ).
2, Thang máy thuỷ lực (bằng xylanh - pittông): Đặc điểm của loại này là cabinđược đẩy từ dưới lên nhờ xylanh - pittông thuỷ lực nên hành trình bị hạn chế vìvậy không thể trang bị cho các công trình cao tầng, mặc dù kết cấu đơn giản, tiếtdiện giếng thang so với dẫn động cáp có cùng tải trọng.
- Theo các thông số cơ bản:
1, Theo tốc độ di chuyển của cabin:
+Loại tốc độ thấp:ν <1 m/s
+Loại tốc độ trung bình: ν < 1 ÷ 2,5 m/s
+Loại tốc độ cao: ν <2,5 ÷ 4 m/s
+ Loại tốc độ rất cao: ν > 4 m/s.
2, Theo khối lượng vận chuyển của cabin:
+Loại nhỏ: Q < 500 kg
+Loại trung bình: Q = 500 ÷1000 kg
+ Loại lớn: Q = 1000 ÷ 1600 kg
+Loại rất lớn: Q >1600 kg
- Theo vị trí đặt bộ tời kéo
Đối với thang máy điện:
+Thang máy có bộ tời kéo đặt trên giếng thang
+Thang máy có bộ tời kéo đặt dưới giếng thang
- Theo quỹ đạo di chuyển của cabin
1, Thang máy thẳng đứng
2, Thang máy nghiêng
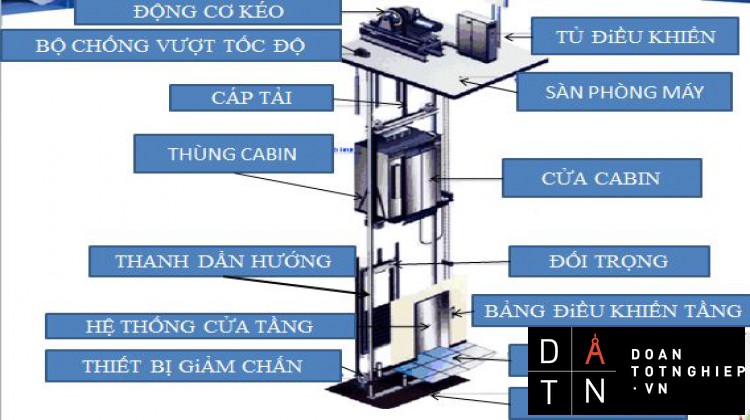
- Chức năng của một số bộ phận trong thang máy
- Cabin
Là một phần tử chấp hành quan trọng nhất trong thang máy, nó sẽ là nơi chứahàng, chở người đến các tầng, do đó phải đảm bảo các yêu cầu đề ra về kích thước,hình dáng, thẩm mỹ và các tiện nghi trong đó.
Hoạt động của cabin là chuyển động tịnh tiến lên xuống dựa trên đường trượt,là hệ thống hai dây dẫn hướng nằm trong mặt phẳng để đảm bảo chuyển động êmnhẹ, chính xác không rung giật trong cabin trong quá trình làm việc. Để đảm bảocho cabin hoạt động đều cả trong quá trình lên và xuống, có tải hay không có tảingười ta sử dụng một đối trọng có chuyển động tịnh tiến trên hai thanh khác đồngphẳng giống như cabin nhưng chuyển động ngược chiều với cabin do cáp được vắtqua puli kéo.
Do trọng lượng của cabin và trọng lượng của đối trọng đã được tính toán tỷ lệvà kỹ lưỡng cho nên mặc dù chỉ vắt qua puli kéo cũng không xảy ra hiện tượngtrượt trên pulicabin, hộp giảm tốc đối trọng tạo nên một cơ hệ phối hợp chuyểnđộng nhịp nhàng do phần khác điều chỉnh đó là động cơ.
- Động cơ
Là khâu dẫn động hộp giảm tốc theo một vận tốc quy định làm quay puli kéocabin lên xuống. Động cơ được sử dụng trong thang máy là động cơ 3 pha rôto dâyquấn hoặc rôto lồng sóc, vì chế độ làm việc của thang máy là ngắn hạn lặp lại cộngvới yêu cầu sử dụng tốc độ, mômen động cơ theo một dải nào đó cho đảm bảo yêucầu về kinh tế và cảm giác của người đi thang máy. Động cơ là một phần tử quantrọng được điều chỉnh phù hợp với yêu cầu nhờ một hệ thống điện tử ở bộ xử lýtrung tâm.
- Phanh
Phanh hãm điện từ: là khâu an toàn, nó thực hiện nhiệm vụ giữ cho cabin đứngim ở các vị trí dừng tầng hoặc khi có sự cố xảy ra. khối tác động là hai má phanhsẽ kẹp lấy tang phanh, tang phanh gắn đồng trục với trục động cơ, cũng có thểchúng được bố trí trên ca bin khi đó má phanh sẽ ép vào thanh dẫn hướng. Hoạtđộng đóng mở của phanh được phối hợp nhịp nhàng với quá trình làm việc củađộng cơ.
Phanh bảo hiểm: Chức năng của phanh bảo hiểm là hạn chế tốc độ di chuyểncủa buồng thang vượt quá giới hạn cho phép và giữ chặt buồng thang tại chỗ bằngcách ép vào hai thanh dẫn hướng trong trường hợp bị đứt cáp treo.
- Cửa cabin và cửa tầng
Cửa cabin để khép kín cabin trong quá trình chuyển động không tạo ra cảm giácchóng mặt cho khách hàng và ngăn không cho rơi khỏi cabin bất cứ thứ gì. Cửatầng để che chắn bảo vệ toàn bộ giếng thang và các thiết bị trong đó. Cửa cabin vàcửa tầng có khoá tự động để đảm bảo đóng mở kịp thời. Cửa cabin và cửa tầng khihoạt động phải theo một quy luật nhất định sẽ đảm bảo quá trình đóng mở êm nhẹkhông có va đập. Nếu không may một vật gì đó hay người kẹp giữa cửa tầng đangđóng thì cửa sẽ mở tự động nhờbộ phận đặc biệt ở gờ cửa có gắn phản hồi vớiđộng cơ qua bộ xử lý trung tâm.
- Động cơ cửa
Động cơ cửa gồm có động cơ cửa cabin và động cơ cửa tầng, khi làm việc phảiêm không gây tiếng ồn. Loại động cơ này thường là động cơ một chiều không chổithan ( động cơ servo 1 chiều). Để điều khiển được loại động cơ này cần có bộDriver thường đi kèm với từng loại động cơ.
1.1.4.6 Các thiết bị phụ khác
Quạt gió, chuông liên lạc, các chỉ thị số báo tầng,… được lắp đặt trong cabin đểtạo ra cho khách hàng một cảm giác dễ chịu khi đi thang máy. Trong các thangmáy trở người, tời dẫn động thường được đặt trên cao và dùng Puly ma sát để dẫnđộng trong cabin và đối trọng. Đối với thang máy có chiều cao nâng lớn trọnglượng cáp nâng tương đối lớn nên trong sơ đồ động người ta treo thêm các cáphoặc xích cân bằng phía dưới cabin hoặc đối trọng. Puly ma sát có các loại rãnhcáp tròn có xẻ dưới và rãnh hình thang. Mỗi sợi cáp riêng biệt vắt qua một rãnhcáp, mỗi rãnh cáp thường từ ba đến năm rãnh. Đối trọng là bộ phận cân bằng, đốivới thang máy có chiều cao không lớn người ta thường chọn đối trọng sao chotrọng lượng của nó cân bằng với trọng lượng ca bin và một phần tử tải trọng nângbỏ qua trọng lượng cáp nâng, cáp điện và không dùng cáp cân bằng. Việc chọn cácthông số cơ bản của hệ thống cân bằng thì có thể tiến hành tính lực cáp cân bằnglớn nhất và chọn cáp tính công suất động cơ và khả năng kéo của puly ma sát.
- Cảm biến vị trí
Trong thang máy cảm biến vị trí dùng để:
-Xác định vị trí của buồng thang.
-Phát lệnh dừng buồng thang ở mỗi tầng.
-Chuyển đổi tốc độ động cơ truyền động từ tốc độ cao sang tốc độ thấp khibuồng thang đến gần tầng cần dừng, để nâng cao độ dừng chính xác củabuồng thang.
Các loại cảm biến vị trí:
1, Cảm biến vị trí kiểu cơ khí (công tắc chuyển đổi tầng)
Cảm biến vị trí kiểu cơ khí là một loại công tắc ba vị trí, có ưu điểm là kết cấuđơn giản, thực hiện đủ ba chức năng của bộ phận cảm biến vị trí. Nhưng khi làmviệc thì gây tiếng ồn lớn, gây nhiễu cho các thiết bị vô tuyến, tuổi thọ làm việckhông cao, đặc biệt là đối với thang máy tốc độ cao.
2, Cảm biến vị trí kiểu cảm ứng
Cấu tạo của nó bao gồm: 1 mạch từ hở , 1 cuộn dây .Khi mạch từ hở, do điện kháng của cuộn dây bé, dòng xoay chiều qua cuộn dâytương đối lớn. Khi thanh sắt động làm kín mạch từ, từ thông sinh ra trong mạchtừ tăng làm tăng điện cảm L của cuộn dây và dòng đi qua cuộn dây sẽ giảm xuống.
3, Cảm biến quang
Cảm biến quang gồm nguồn phát quang và bộ thu quang, nguồn phát sử dụngLED hoặc LASER (thường dùng điôt phát quang), bộ thu sử dụng Transistorquang. Để nâng cao độ tin cậy của bộ cảm biến không bị ảnh hưởng độ sáng củamôi trường thường dùng phần tử phát quang và thu quang hồng ngoại. Dùng mạchdao động để phát xa và tránh ảnh hưởng của nhiễu. Khi có vật đi qua giữa bộ phátvà bộ thu, bộ thu sẽ thay đổi trạng thái đầu ra.
4, Cảm biến điện dung
Công thức tính điện dung: C=A.K/D, cảm biến sẽ phát hiện vật đến gần vì vậtnày làm thay đổi điện môi giữa 2 bản cực đến giá trị đặt trước. Cảm biến có thểphát hiện vật đến gần cách vài cm.
5, Cảm biến điện cảm
Dựa vào từ trường cảm ứng để nhận biết vật kim loại đến gần, dòng điện cảmứng trong vật kim loại sẽ tạo từ trường ngược với từ trường ban đầu làm thay đổicảmkháng cuộn dây. Cảm biến này có thể nhận biết bất kì kim loại nào.
Ngoài ra còn có các loại cảm biến khác: bộ cảm biến hồng ngoại, phần tử HALL...
- Các yêu cầu đối với thang máy
1.2.1 Yêu cầu về an toàn trong điều khiển thang máy
Thang máy là thiết bị chuyên dùng để chở người, chở hàng từ độ cao này đếnđộ cao khác vì vậy trong thang máy, vấn đề an toàn được đặt lên hàng đầu. Để đảmcho sự hoạt động an toàn của thang máy, người ta bố trí một loạt các thiết bị giámsát hoạt động của thang nhằm phát hiện và xử lý sự cố.
Trong thực tế, khi thiết kế truyền động cho thang máy phải phối hợp bảo vệ cảphần cơ và phần điện, kết hợp nhiều loại bảo vệ. Chẳng hạn, khi cấp điện cho độngcơ kéo buồng thang thì cũng cấp điện luôn cho phanh hãm, làm nhả các má phanhkẹp vào ray dẫn hướng. Khi đó buồng thang mới có thể chuyển động được. Khimất điện, cácmá phanh kẹp sẽ tác động vào đường ray giữ cho buồng thang khôngrơi.
Ngoài các bộ hạn chế tốc độ và phanh người ta còn đặt các tín hiệu bảo vệ và hệthống báo sự cố. Mục đích là để đảm bảo an toàn cho thang máy và giúp người kỹsư bảo dưỡng thấy được thiết bị khống chế tự động đã bị hỏng, cần được kiểm tratrước khi thang được tiếp tục đưa vào hoạt động.
Việc đóng mở cửa thang hay cửa tầng chỉ được thực hiện tại tầng nơi buồngthang dừng và khi buồng thang đã dừng chính xác.
- Dừng chính xác buồng thang
Buồng thang của thang máy cần phải dừng chính xác so với mặt bằng của tầngcần dừng sau khi đã ấn nút dừng. Nếu buồng thang dừng không chính xác sẽ gây racác hiện tượng sau :
-Đối với thang máy chở khách: làm cho hành khách ra, vào khó khăn, tăngthời gian ra, vào của hành khách, dẫn đến giảm năng xuất.
- Đối với thang máy chở hàng, gây khó khăn cho việc bốc xếp và bốc dỡhàng. Trong một số trường hợp có thể không thực hiện được việc xếp và bốc dỡhàng.
Để khắc phục hậu quả đó, có thể ấn nhắp nút bấm để đạt được độ chính xác khidừng, nhưng sẽ dẫn đến các vấn đề không mong muốn sau:
-Hỏng thiết bị điều khiển.
- Gây tổn thất năng lượng.
-Gây hỏng hóc các thiết bị cơ khí.
-Tăng thời gian từ lúc hãm đến dừng.
Để dừng chính xác buồng thang, cần tính đến một nửa hiệu số của hai quãngđường trượt khi phanh buồng thang đầy tải và phanh buồng thang không tải theocùng một hướng di chuyển. Các yếu tố ảnh hưởng đến dừng chính xác buồng thangbao gồm: mômen cơ cấu phanh, mômen quán tính của buồng thang, tốc độ khi bắtđầu hãm.
- ảnh hưởng của tốc độ, gia tốc và độ giật đối với hệ truyền động thang máy
Một trong những điều kiện cơ bản đối với hệ truyền động thang máy là phảiđảm bảo cho buồng thang chuyển động êm. Việc buồng thang chuyển động êm haykhông lại phụ thuộc vào gia tốc khi mở máy và hãm máy. Các tham số chính đặctrưng cho chế độ là việc của thang máy là: tốc độ di chuyển v[m/s], gia tốc a [m/s2]và độ giật ρ[m/s3].
Tốc độ di chuyển của buồng thang quyết định năng suất của thang máy, điềunày có ý nghĩa rất quan trọng, nhất là đối với các nhà cao tầng.
Đối với các nhà cao tầng, tối ưu nhất là dùng thang máy cao tốc (v = 3,5m/s),giảm thời gian quá độ và tốc độ di chuyển trung bình của buồng thang đặt gầnbằng tốc độ định mức. Nhưng việc tăng tốc độ lại dẫn đến tăng giá thành của thangmáy. Nếu tăng tốc độ của thang máy v = 0,75 m/s lên v = 3,5m/s, giá thành tănglên 4÷5 lần, bởi vậy tuỳ theo độ cao tầng của nhà mà chọn thang máy có tốc độphù hợp với tốc độ tối ưu.
- Các yêu cầu đối với hệ thống truyền động điện thang máy
Khi thiết kế trang bị điện - điện tử cho thang máy, việc lựa chọn một hệ truyềnđộng, loại động cơ phải dựa trên các yêu cầu sau:
-Độ chính xác khi dừng
-Tốc độ di chuyển buồng thang
-Gia tốc lớn nhất cho phép
-Phạm vi điều chỉnh tốc độ
Thang máy thường được lắp đặt trong môi trường khá là khắc nghiệt. Phòngmáy thường được đặt ở thường được đặt tại đỉnh của toà nhà vì vậy máy nhiệt độcủa phòng máy thường cao. Chế độ làm việc của động cơ là ngắn hạn lặp lại vớitần số đóng cắt điện lớn, mở máy, hãm dừng liên tục.
Các hệ truyền động cho thang máy:
-Hệ thống máy phát động cơ
-Hệ thống bộ biến đổi tĩnh - động cơ một chiều
-Hệ thống bộ biến tần- động cơ không đồng bộ
-Hệ thống dùng động cơ không đồng bộ nhiều cấp tốc độ
Dựa vào yêu cầu công nghệ đặt ra và căn cứ vào số tầng phục vụ, mà chọn hệthống truyền động tối ưu sao cho thoả mãn một cách hài hoà nhất giữa chỉ tiêukinh tế và kỹ thuật. Đối với các nhà cao 7 tầng thường chọn hệ thống truyền độngđiện sử dụng biến tần - động cơ không đồng bộ rô to lồng sóc, hệ thống này đangđược ứng dụng rất nhiều trong thực tế và có sự ưu việt hơn các hệ thống khác như:có độ chính xác cao, linh hoạt trong lắp đặt và sửa chữa, đồng thời tiết kiệm điệnnăng. Việc thay đổi tốc độ thực chất là thay đổi tần số của nguồn cấp cho động cơ,nhờ bộ biến tần. Sao cho đạt được tỉ lệ: Vmin / Vmax =1/4. Để đảm bảo thang máycó tốc độ hợp lý thì giữa động cơ kéo và puly có thêm hộp giảm tốc.
- Các yêu cầu chọn công suất động cơ truyền động thang máy
Để tính toán chọn được công suất động cơ truyền động thang máy cần có các điềukiện và tham số sau:
-Sơ đồ động học của thang máy
-Tốc độ và gia tốc lớn nhất cho phép
-Trọng tải
-Trọng lượng buồng thang.
Chương 2: GIỚI THIỆU VỀ PLC
2.1 Khái niệm về PLC
PLC (Programmable Logic Controller) là thiết bị điều khiển lập trình, được thiết kế chuyên dùng trong công nghiệp để điều khiển các tiến trình xử lý từ đơn giản đến phức tạp, tùy thuộc vào người điều khiển mà nó có thể thực hiện một loạt các chương trình hoặc sự kiện, sự kiện này được kích hoạt bởi các tác nhân kích thích (hay còn gọi là đầu vào) tác động vào PLC hoặc qua các bộ định thời (Timer) hay các sự kiện đếm qua bộ đếm. Khi một sự kiện được kích hoạt nó sẽ bật ON,OFF hoặc phát một chuỗi xung ra các thiết bị bên ngoài được gắn vào đầu ra của PLC. Như vậy nếu ta thay đổi các chương trình được cài đạt trong PLC là ta có thể thực hiện các chức năng khác nhau, trong các môi trường điều khiển khác nhau.
- Lịch sử phát triển
Vào khoảng năm 1968, các nhà sản xuất ô tô đã đưa ra các yêu cầu kỹ thuât đầu tiên cho thiết bị điêù khiển lô gíc khả lập trình. Mục đích đầu tiên là thay thế cho các tủ điều khiển cồng kềnh, tiêu thụ nhiều điện năng và thường xuyên phải thay thể các rơ le do hỏng cuộn hút hay gẫy các thanh lò xo tiếp điểm. Mục đích thứ hai là tạo ra một thiều bị điều khiển có tính linh hoạt trong việc thay đổi chương trình điều khiển. Các yêu cầu kỹ thuật này chính là cơ sở của các máy tính công nghiệp, mà ưu điểm chính của nó là sự lập trình dễ dàng bởi các kỹ thuật viên và các kỹ sư sản xuất. Với thiết bị điều khiển khả lập trình, người ta có thể giảm thời gian dừng trong sản xuất, mở rộng khả năng hoàn thiện hệ thống sản xuất và thích ứng với sự thay đổi trong sản xuất. Một số nhà sản xuất thiết bị điều khiển trên cơ sở máy tính đã sản xuất ra các thiết bị điều khiển khả lập trình còn gọi là PLC.
Những PLC đầu tiên được ứng dụng trong công nghiệp ô tô vào năm 1969 đã đem lại sự ưu việt hơn hẳn các hệ thống điều khiển trên cơ sở rơ le. Các thiết bị này được lập trình dễ dàng, không chiếm nhiều không gian trong các xưởng sản xuất và có độ tin cậy cao hơn các hệ thống rơ le. Các ứng dụng của PLC đã nhanh chóng rộng mở ra tất cả các ngành công nghiệp sản xuất khác.
Hai đặc điểm chính dẫn đến sự thành công của PLC đó chính là độ tin cậy cao và khả năng lập trình dễ dàng. Độ tin cậy của PLC được đảm bảo bởi các mạch bán dẫn được thiết kế thích ứng với môi trường công nghiệp. Các mạch vào ra được thiết kế đảm bảo khả năng chống nhiễu, chịu được ẩm, chịu được dầu, bụi và nhiệt độ cao. Các ngôn ngữ lập trình đầu tiên của PLC tương tự như sơ đồ thang trong các hệ thống điều khiển lô gíc, nên các kỹ sư đã làm quen với sơ đồ thang, dễ dàng thích nghi với việc lập trình mà không cần phải qua một quá trình đào tạo nào. Một số các ứng dụng của máy tính trong sản xuất trong thời gian đầu bị thất bại, cũng chính vì việc học sử dụng các phần mềm máy tính không dễ dàng ngay cả với các kỹ sư.
Khi các vi xử lý được đưa vào sử dụng trong những năm 1974 – 1975, các khả năng cơ bản của PLC được mở rộng và hoàn thiện hơn. Các PLC có trang bị vi xử lý có khả năng thực hiện các tính toán và xử lý số liệu phức tạp, điều này làm tăng khả năng ứng dụng của PLC cho các hệ thống điều khiển phức tạp. Các PLC không chỉ dừng lại ở chổ là các thiết bị điều khiển lô gic, mà nó còn có khả năng thay thế cả các thiết bị điều khiển tương tự. Vào cuối những năm 70 việc truyền dữ liệu đã trở nên dễ dàng nhờ sự phát triển nhảy vọt của công nghiệp điện tử. Các PLC có thể điều khiển các thiết bị cách xa hàng vài trăm mét. Các PLC có thể trao đổi dữ liệu cho nhau và việc điều khiển quá trình sản xuất trở nên dễ dàng hơn.
2.3 Cấu trúc cơ bản của PLC
PLC gồm có 4 thành phần cơ bản sau:
- Input Area: các tín hiệu nhận vào từ các thiết bị đầu vào bên ngoài (Input Devices) sẽ được lưu trong vùng nhớ này
- Output Area: Các lệnh về điều khiển đầu ra sẽ được lưu tạm trong vùng nhớ này. Các mạch điện tử trong PLC sẽ xử lý lệnh và đưa ra tín hiệu điều khiển thiết bị ngoài (Output Devices).
- Bộ xử lý trung tâm (CPU) là nơi xử lý mọi hoạt động của PLC, bao gồm việc thực hiện chương trình
- Bộ nhớ (Memory) Là nơi lưu chương trình điều khiển và các trạng thái nhớ trung gian trong quá trình thực hiện.
- Mạch đầu vào (Input Unit)
Là các mạch điện tử làm nhiệm vụ phối ghép chuyển đổi giữa tín hiệu điện đầu vào (Input) và tín hiệu số sử dụng bên trong PLC. Kết quả của việc xử lý sẽ được lưu ở vùng nhớ Input Area. Mạch đầu vào được cách ly về điện với các mạch trong của PLC nhờ các điốt quang. Bởi vậy, hư hỏng mạch đầu vào sẽ không ảnh hưởng đến hoạt động của CPU.
Bộ PLC đào tạo thử nghiệm có điện áp đầu vào là 24V một chiều.
- Các thiết bị vào ra thường gặp:
................................................
- Lập trình PLC Thang máy 6 tầng 2 cabin
3.3.1 các bước lập trình
Để lập chương trình điều khiển thang máy phải xuất phát từ các yêu cầu công nghệ của đối tượng điều khiển . Từ các yêu cầu công nghệ xây dựng thuật toán điều khiển, hoặc xây dựng logic điều khiển. Bước cuối cùng là xây dựng thuật toán hoặc sơ đồ logic dùng ngôn ngữ lập trình để viết chương trình điều khiển, các bước lập trình có thể mô tả như sau:
Từ thuật toán logic điều khiển vạch ra 1 hướng đi để viết chương trình hướng đi đó xuất phát từ các yêu cầu công nghệ.
Việc kiểm tra chương trình có thể thực hiện gián tiếp thông qua sơ đồ logic và việc chuyển sơ đồ thành chương trình rất thuận tiện ít có khả năng sai sót.




