ĐỒ ÁN TỐT NGHIỆP BỘ THÍ NGHIỆM MULTILAB – ĐIỀU KHIỂN PID

NỘI DUNG ĐỒ ÁN
LỜI NÓI ĐẦU
- Ngày nay, với những ứng dụng của khoa học kỹ thuật tiên tiến, thế giới của chúng ta đã và đang ngày một thay đổi, văn minh và hiện đại hơn. Sự phát triển của công nghệ tự động đã tạo ra hàng loạt những công nghệ, thiết bị, máy móc, dây chuyền sản xuất với các đặc điểm nổi bậy như : sự chính xác cao, tốc độ nhanh, gọn nhẹ, đó là những yếu tố rất cần thiết cho cuộc sống cũng như nền công nghiệp hiện đại ngày nay, nó là yếu tố quyết định cho công việc của con người được thực hiện một cách nhanh chống và chính xác .
- Công nghệ tự động đang trở thành một ngành kỹ thuật đa nhiệm vụ và đáp ứng được những đòi hỏi không ngừng trong các lĩnh vực khác: Công nghiệp,thiết bị y học và cả trong Nông-Lâm nghiệp cho đến các nhu cầu cần thiết trong họat động đời sống hằng ngày.
- Xuất phát từ những nhu cầu ứng dụng thực tế quan trọng đó, Nhóm đã đi tim hiểu bộ thí nghiệm multilab - điều khiển PID
- Với tinh thần làm việc hăng say của cả Nhóm để hoàn thành đồ án.Trong tập đồ án này của Nhóm nếu có sai sót kính mong quý thầy, cô và các bạn chân thành góp ý.
Mục lục
Nhiệm vụ đồ án tốt nghiệp
Lời mở đầu
Lời cảm ơn
Trang
Chương 1 : giới thiệu tổng quan về đề tài.................................................................... 1
1.1 đặt vấn đề............................................................................................................. 1
1.2 mục tiêu của đề tài............................................................................................... 1
1.3 phạm vi đề tài....................................................................................................... 1
1.4 sơ lược nội dung đồ án........................................................................................ 1
Chương 2 : đại cương về điều khiển tự động............................................................... 3
2.1 Mục tiêu của công nghệ điều khiển tự động : Ðáp ứng theo thay đổi của các giá trị điểm đặt và các tác động nhiễu............................................................................................................. 3
2.1.1Công nghệ điều khiển tự động sẽ ứng dụng ở đâu trong thế giới hiện đại? 3
2.1.2 Điều khiển theo lệnh cố định.................................................................... 3
2.1.3 Điều khiển bám (tuần tự ).......................................................................... 4
2.1.4 Các ứng dụng của công nghệ điều khiển................................................. 4
2.2 nguyên lý điều khiển vòng hở .......................................................................... 5
2.2.1 điều khiển vòng kín và điều khiển vòng hở........................................... 5
2.2.2 ví dụ về điều khiển nhiệt độ phòng......................................................... 5
2.3 nguyên lý phản hồi ( điều khiển vòng kín ).................................................... 6
Chương 3 : các khâu điều khiển hoạt động trong miền thời gian............................. 9
3.1 Card thí nghiệm “Các mô phỏng về hệ thống được điều khiển”................... 9
3.2 phân loại các phần tử của vòng điều khiển.................................................... 10
3.2.1 khái niệm về một phần tử truyền ( khâu truyền )................................ 10
3.2.2 các kiểu khâu truyền tuyến tính............................................................ 11
3.3 đáp ứng tĩnh và đáp ứng động của các phần tử vòng điều khiển............... 12
3.3.1 đáp ứng tĩnh của hệ thống....................................................................... 12
3.3.2 đáp ứng động của hệ thống..................................................................... 14
3.4 các tham số của phần tử P ( khâu tỷ lệ P )..................................................... 15
3.4.1 phân loại khâu tỷ lệ P............................................................................... 15
3.4.2 ví dụ về một khâu tỷ lệ P........................................................................ 16
3.4.3 thí nghiệm ................................................................................................ 17
3.5 các tham số của khâu động học PT1.............................................................. 18
3.5.1 phân loại khâu động học PT1................................................................. 18
3.5.2 Xác định hằng số thời gian trên cơ sở của đáp ứng bậc thang........... 19
3.5.2.1 xác định giá trị của T phương pháp tangent................................ 19
3.5.2.2 xác định giá trị của T phương pháp 63%..................................... 20
3.5.3 ví dụ về khâu động học PT1................................................................... 20
3.5.4 thí nghiệm................................................................................................. 21
3.6 các tham số của khâu động học PT2.............................................................. 25
3.6.1 phân loại khâu PT2................................................................................... 25
3.6.2 ví dụ về khâu động học PT2................................................................... 26
3.6.3 thí nghiệm................................................................................................. 27
3.7 các tham số của khâu tích phân I.................................................................... 29
3.7.1 phân loại khâu tích phân I....................................................................... 29
3.7.2 các ví dụ về khâu tích phân I................................................................. 29
3.7.3 thí nghiệm................................................................................................. 30
3.8 các tham số của khâu trễ.................................................................................. 32
3.8.1 phân loại khâu trễ..................................................................................... 32
3.8.2 ví dụ về khâu trễ...................................................................................... 33
3.8.3 thí nghiệm................................................................................................. 33
3.9 các khâu kết hợp về hệ thống được điều khiển............................................ 35
3.9.1 các tham số của các khâu có bậc trễ cao hơn..................................... 35
3.9.2 các thí nghiệm.......................................................................................... 37
Chương 4 : các bộ điều khiển thông thường.............................................................. 41
4.1 bộ điều khiển liên tục....................................................................................... 41
4.1.1 các thành phần của bộ điều khiển PID................................................. 41
4.1.1.1 cấu trúc của bộ điều khiển............................................................ 41
4.1.1.2 ảnh hưởng của khâu tỷ lệ.............................................................. 42
4.1.1.3 ảnh hưởng của khâu tác động tích phân...................................... 42
4.1.1.4 ảnh hưởng của khâu vi phân......................................................... 43
4.1.2 card thí nghiệm về bộ điều khiển PID SO4201-5R............................. 43
4.1.2.1 giới thiệu chung.............................................................................. 43
4.1.2.2 các thông số kỹ thuật..................................................................... 44
4.1.3 bộ điều khiển tỷ lệ................................................................................... 47
4.1.3.1 phân loại........................................................................................... 47
4.1.3.2 thí nghiệm : bộ điều khiển P của một hệ thống PT2.................. 48
4.1.4 bộ điều khiển I.......................................................................................... 50
4.1.4.1 phân loại........................................................................................... 50
4.1.4.2 ví dụ về một bộ điều khiển I trong kỹ thuật................................ 51
4.1.4.3 thí nghiệm : điều khiển theo tác động tích phân I của một hệ thống được điều khiển PT2 51
4.1.5 bộ điều khiển PI........................................................................................ 55
4.1.5.1 phân loại........................................................................................... 55
4.1.5.2 xác định các tham số của bộ điều khiển từ đáp ứng bậc thang 56
4.1.5.3 thí nghiệm : đáp ứng bậc thang của bộ điều khiển PI............... 56
4.1.6 bộ điều khiển PD...................................................................................... 60
4.1.6.1 phân loại........................................................................................... 60
4.1.6.2 thí nghiệm : bộ điều khiển PD trong một hệ thống được điều khiển PT2 61
4.1.7 bộ điều khiển PID..................................................................................... 64
4.1.7.1 phân loại............................................................................................ 64
4.1.7.2 thực thi kỹ thuật các bộ điều khiển PID....................................... 65
4.1.7.3 thí nghiệm : bộ điều khiển PID trong một hệ thống được điều khiển PT2 66
4.2 bộ điều khiển rời rạc......................................................................................... 68
4.2.1 card thí nghiệm về bộ điều khiển 2 vị trí/3 vị trí SO4201-5S........... 68
4.2.1.1 giới thiệu chung............................................................................... 68
4.2.1.2 các thông số kỹ thuật....................................................................... 68
4.1.1.3 các phần tử làm việc và các ổ cắm................................................ 69
4.2.2 bộ điều khiển 2 vị trí............................................................................... 72
4.2.2.1 bộ điều khiển 2 vị trí không có trễ................................................ 72
4.2.2.2 bộ điều khiển 2 vị trí có trễ............................................................ 73
4.2.2.3 thí nghiệm......................................................................................... 73
4.2.3 bộ điều khiển 3 vị trí............................................................................... 74
4.2.3.1 đặc tính của bộ điều khiển 3 vị trí................................................. 74
Tổng kết ......................................................................................................................... 76
Tài liệu tham khảo.......................................................................................................... 77
Chương 1 : giỚi thiỆu tỔng quan vỀ đỀ tài
- Đặt vấn đề
Tại sao cần phải điều khiển? câu trả lời tùy thuộc vào từng trường hợp cụ thể, tuy nhiên có hai lý do chính là con người không thỏa mãn với đáp ứng của hệ thống hay muốn hệ thống hoạt động tăng độ chính xác, tăng năng suất, tăng hiệu quả kinh tế. ví dụ trong lĩnh vực dân dụng, chúng ta cần điều chỉnh nhiệt độ và độ ẩm cho các căn hộ và các cao ốc tạo ra sự tiện nghi trong cuộc sống. trong vận tải cần điều khiển các xe hay máy bay từ nơi này đến nơi khác một cách an toàn và chính xác. Trong công nghiệp, các quá trình sản xuất bao gồm vô số mục tiêu sản xuất thỏa mãn các đòi hỏi về sự an toàn, độ chính xác và hiệu quả kinh tế. Điều khiển tự động có rất nhiều ứng dụng trong thực tế.
Trước thực tế đó kết hợp với những kiến thức đã được học nhóm đã quyết định bắt tay vào nghiên cứu và thực hiện đề tài: “bộ thí nghiệm multilab – điều khiển PID”.
- Mục tiêu của đề tài
Những vấn đề cần giải quyết trong đề tài:
-Tìm hiểu phần mềm labsoft.
-Tìm hiểu đáp ứng của các khâu trong bộ điều khiển.
1.3 Phạm vi đề tài
-Phần mềm labsoft về hệ thống điều khiển tự động.
-Card thí nghiệm "Các mô phỏng về hệ thống được điều khiển” SO4201-5U.
-Card thí nghiệm về bộ điều khiển PID SO4201-5R.
-Card thí nghiệm về bộ điều khiển 2 vị trí / 3vị trí SO4201-5S.
1.4 Sơ lược nội dung đồ án
Chương 1: Giới thiệu tổng quan đề tài.
-Đặt vấn đề.
-Mục tiêu của đề tài.
-Phạm vi đề tài.
-Sơ lược nội dung đồ án.
Chương 2 : Giới thiệu hệ thống điều khiển tự động.
-mục tiêu của công nghệ điều khiển tự động.
-nguyên lý vòng điều khiển hở.
-nguyên lý phản hồi ( điều khiển vòng kín ).
Chương 3 : Các khâu điều khiển hoạt động trong miền thời gian.
- thí nghiệm "Các mô phỏng về hệ thống được điều khiển” SO4201-5U.
-Phân loại các phần tử của vòng điều khiển.
-Đáp ứng tĩnh và đáp ứng động của các phần tử vòng điều khiển.
- tham số của phần tử P (khâu tỷ lệ P).
-Các tham số của khâu động học PT1.
- tham số của khâu tích phân I.
-Các tham số của khâu trễ.
Chương 4 : các bộ điều khiển thông thường.
-Bộ điều khiển liên tục.
-Card thí nghiệm về bộ điều khiển PID SO4201-5R.
-Bộ điều khiển rời rạc.
-Card thí nghiệm về bộ điều khiển 2 vị trí / 3vị trí SO4201-5S.
Chương 2 : đẠi cương vỀ điỀu khiỀn tỰ đỘng
- MỤc tiêu cỦa công nghỆ điỀu khiỂn tỰ đỘng : Ðáp Ứng theo thay đỔi cỦa các giá trỊ ĐiỂm đẶt và các tác đỘng nhiỄu
- Công nghệ điều khiển tự động sẽ ứng dụng ở đâu trong thế giới hiện đại?
Kỷ nguyên của chúng ta thường được coi là “Thời đại của tự động hóa”. Nguyên nhân chính của điều này là sự phát triển không ngừng và ngày càng gay gắt của các hoạt động giám sát, điều khiển và điều chỉnh của con người lên các máy móc và thiết bị (và ngày nay mọi hoạt động đó của con người đều đã được hỗ trợ bằng máy tính). Cốt lõi của công nghệ tự động hóa hiện đại về cơ bản bao gồm công nghệ điều khiển vòng kín và điều khiển vòng hở. Mặc dù cả hai lĩnh vực này thực tế đều có mục tiêu giống nhau, nhưng về nguyên lý cơ bản thì giữa chúng có sự khác nhau về cách thức thực hiện để đạt được các mục tiêu của quá trình điều khiển. Và như sau này chúng ta sẽ thấy, công nghệ điều khiển vòng kín thường tạo ra các nguyên lý điều khiển cao cấp về mặt kỹ thuật, cho dù nó có thể có chi phí cao hơn cho thiết kế và thiết bị.
Mục tiêu cơ bản của điều khiển vòng kín là điều khiển hoặc hiệu chỉnh các biến nhất định (thông thường là các biến đầu ra của các quá trình kỹ thuật ) theo các giá trị tham chiếu đặt trước của chúng. Các biến cần được điều khiển (các biến được điều khiển ) một mặt, phải có khả năng bám theo mọi sự thay đổi của các biến tham chiếu càng sát càng tốt (đáp ứng tốt đối với các thay đổi của giá trị đặt trước) và mặt khác, phải có khả năng chống lại được tác động của các tác nhân gây nhiễu lên quá trình (đáp ứng chống nhiễu tốt). Ở đây có sự phân biệt giữa điều khiển theo lệnh cố định và điều khiển theo trình tự (hay còn gọi là điều khiển bám sát).
- Điều khiển theo lệnh cố định
Nếu biến đầu ra của quá trình cần phải được duy trì tại một giá trị cố định không đổi trong suốt quá trình, thì quá trình điều khiển này được gọi là điều khiển theo lệnh cố định (hay điều khiển theo giá trị cố định). Một ví dụ trong kỹ thuật là quá trình điều khiển để duy trì tốc độ quay không đổi của một động cơ. Ðây là thành công đầu tiên mà con người đạt được trong lịch sử vào năm 1769 bởi James Watt bằng thiết bị được gọi là bộ điều khiển ly tâm (centrifugal governor). Như hình vẽ dưới đây, thiết bị đó đã được sử dụng để điều chỉnh luồng hơi nước vào trong động cơ hơi nước sao cho động cơ luôn chạy với tốc độ hầu như không đổi bất kể tải của nó là như thế nào.
Sự dịch chuyển của đòn bẩy sang trái hoặc sang phải tác động lên hệ thống như thế nào? Các bạn hãy trả lời và trình bày lý do vì sao vào trong hộp thoại dưới đây.
|
- Điều khiển bám (tuần tự )
Nếu biến tham chiếu, nghĩa là biến mà biến đầu ra của quá trình cần phải bám theo, không phải là hằng số theo thời gian mà nó thay đổi trong suốt quá trình, thì người ta goi đó là quá trình điều khiển theo trình tự (hay điều khiển bám sát). Một ví dụ về điều khiển bám sát là duy trì chuyển động của con tàu theo một hướng (ví dụ khi tàu chạy dọc theo một kênh hẹp). Phụ thuộc vào đường chảy của kênh mà giá trị đặt hoặc giá trị mong muốn w là chuyển động liên tục (xem biểu đồ dưới đây). Bằng cách thay đổi vị trí của bánh lái (biến được tác động y), bộ điều khiển R tác động lên góc thực tế của hướng con tàu, đó là biến được điều khiển x và như vậy tạo ra một sự điều chỉnh liên tục theo hướng đã đặt sao cho độ sai lệch giữa hướng đặt và hướng thực tế (tín hiệu sai lệch e) càng nhỏ càng tốt. Các tác động can nhiễu, đó là gió hay dòng chảy của nước cũng có thể tăng lên và cũng phải được tính đến.
- Các ứng dụng của công nghệ điều khiển
Các hệ thống điều khiển là những thành phần không thể thiếu được trong rất nhiều các thiết bị và hệ thống kỹ thuật. Công nghiệp ô-tô là một trong nhiều lĩnh vực có nhiều ứng dụng về các hệ thống điều khiển tự động. Những chiếc xe ô-tô hiện đại ngày nay có rất nhiều thành phần được tự động điều chỉnh và một trong những hệ thống quen biết nhất có thể là hệ thống phanh chống kẹt ABS (Anti-lock Braking System).
|
- Nguyên lý điều khiển vòng hở
- Ðiều khiển vòng kín và điều khiển vòng hở
Cả hai nguyên lý cơ bản của công nghệ điều khiển tự động - điều khiển vòng kín và điều khiển vòng hở - đều có cùng một mục đích , được gọi là có cùng một tác động mong muốn lên quá trình . Tuy nhiên, chúng lại khác nhau về cách thức hay cấu trúc tác động điều khiển. Ðiều này sẽ được minh hoạ dưới đây thông qua ví dụ về điều khiển duy trì nhiệt độ phòng không đổi.
- Ví dụ về điều khiển nhiệt độ phòng
Minh hoạ dưới đây trình bày sơ đồ khối chức năng của quá trình điều khiển nhiệt độ phòng.
Cách thức điều khiển vòng hở có thể được mô tả sơ bộ như sau:
- Căn phòng và lò sưởi của nó tạo thành một quá trình là đối tượng của tác động điều khiển và được gọi là hệ thống được điều khiển.
- Nhiệt độ ngoài phòng z1 được đo bởi một nhiệt kế và giá trị của nó được cấp tới bộ điều khiển S.
- Bộ điều khiển xác định thiết lập van (biến được tác động) Y trên cơ sở kết hợp nhiệt độ môi trường xung quanh và nhiệt độ mong muốn hay nhiệt độ đặt.
- Luồng hơi nóng (chất làm nóng ) sẽ được chỉnh mạnh lên hoặc giảm xuống như một hàm của thiết lập van. Ðiều này làm cho nhiệt độ trong phòng x tăng lên hoặc giảm xuống.
Ðể minh hoạ tốt hơn mối quan hệ này, ta có thể trình bày nó dưới dạng sơ đồ khối sau:
Sơ đồ khối này có cấu trúc đặc trưng cho điều khiển theo vòng hở:
- Ta có một đường tác động điều khiển lên một hoặc nhiều phần tử của hàm truyền mắc nối tiếp nhau.
- Biến đích thực tế (trong ví dụ này là nhiệt độ phòng) không được đo; và do vậy, bộ điều khiển không thể phát hiện được sai lệch giữa nhiệt độ này và nhiệt độ mong muốn hay nhiệt độ đặt và cũng chính vì vậy mà nó không thể đáp ứng theo một cách thích hợp. Ðây chính là nhược điểm chủ yếu của điều khiển vòng hở.
- Bộ điều khiển về cơ bản được đặt sao cho vòng điều khiển hoạt động “có lý” trong những điều kiện nhất định. Nếu những điều kiện này thay đổi (ví dụ nếu lò sưởi được thay bởi một lờ sưởi khác có công suất mạnh hơn) thì đáp ứng của hệ thống sẽ bị tồi đi.
- Nếu một tác động can nhiễu tăng lên (ví dụ, việc mở cửa sổ, biến can nhiễu z2) thì bộ điều khiển không thể nào phát hiện ra được điều này. Vì lý do này mà nó dẫn đến việc nhiệt độ trong phòng hạ xuống mà không thể nào ngăn cản nổi.
- Ví dụ về đài thu thanh lắp trên xe ô-tô
Trong hầu hết các xe ô-tô hiện nay âm lượng của đài thu thanh thường xuyên được điều chỉnh như là một hàm của tốc độ xe hay động cơ.
Ảnh bên phải:
Ðài thu thanh trên xe Blaupunkt với hệ thống điều chỉnh âm lượng tự động
Hãy giải thích tại sao nó làm việc theo nguyên lý điều khiển vòng hở . Hãy trả lời và giải thích lý do tại sao vào hộp trả lời dưới đây
|
- Nguyên lý phản hồi (điều khiển vòng kín)
- Ví dụ về điều khiển nhiệt độ phòng tự động
Thay cho việc sử dụng điều khiển vòng hở để duy trì nhiệt độ phòng ở một giá trị nhất định như ở trong chương trước, ta có thể sử dụng điều khiển vòng kín để đạt được điều đó. Sơ đồ dưới đây sẽ minh họa hoạt động điều khiển này.
Sơ đồ này hoạt động như sau:
- Căn phòng và máy sưởi của nó lại tạo thành một quá trình là đối tượng của một hoạt động điều khiển ; nhưng trong trường hợp này thì đó là một hệ thống điều khiển vòng kín (đường điều khiển kín).
- Một nhiệt kế thực hiện đo liên tục biến đích là nhiệt độ trong phòng (biến được điều khiển x). Giá trị này được so sánh với nhiệt độ mong muốn (giá trị điểm đặt w). Ðộ sai lệch giữa các biến được gọi là tín hiệu sai lệch e.
- Van sưởi bây giờ được điều chỉnh như một hàm của tín hiệu sai lệch này. Ðiều này có thể được thực hiện bằng tay (hình phía bên trái) hoặc tự động bằng bộ điều khiển (hình phía bên phải). Nếu giá trị của nhiệt độ đo được thấp hơn nhiệt độ mong muốn, thì van sưởi được mở rộng hơn, còn nếu nó cao hơn thì van sưởi sẽ đóng bớt lại. Bằng cách như vây nhiệt độ thực tế luôn được điều chỉnh để tíên gần về nhiệt độ đặt mong muốn.
Dưới đây các mối quan hệ cũng được minh họa rõ ràng hơn khi sử dụng một sơ đồ khối:
Chúng ta có thể thấy rằng, chỉ bằng cách tạo ra một sự thay đổi tưởng chừng rất nhỏ trong sơ đồ của hoạt động điều khiển (chuyển nhiệt kế vào trong phòng), ta đã đạt được một sự cải thiện đáng kể trong đáp ứng của hệ thống. Ðiều này đã tạo ra một đường điều khiển kín có phản hồi của biến được điều khiển, đó còn được gọi là một vòng điều khiển kín. Bằng cách thực hiện so sánh liên tục giá trị thực tế và giá trị điểm đặt, bộ điều khiển lập tức phát hiện ra mọi sai lệch khỏi gía trị mong muốn và có thể khử nó bằng hoạt động can thiệp phù hợp (mở hoặc đóng van lò sưởi) . Ở đây nó không quan tâm đến nguyên nhân gây ra sai lệch là vì đâu, do sự thay đổi trong chính hệ thống điều khiển (do sự thay đổi tham số) hay do tác động của các tác nhân gây can nhiễu ( ví dụ như do mở cửa sổ hay do ánh sáng mặt trời chiếu mạnh hơn vào cửa sổ). Ðây chính là ưu điểm chính của vòng điều khiển kín so với vòng điều khiển hở. Tuy nhiên, một nhược điểm của điều khiển vòng kín là đòi hỏi phải đo biến được điều khiển và điều này thường dẫn đến chi phí lớn hơn cho thiết bị đo (bộ cảm biến). Trong khi đó thì điều khiển vòng hở không đòi hỏi bắt buộc đo biến được điều khiển (nhưng có thể vẫn phải đo các biến khác vì những lý do nhất định, chẳng hạn như đo nhiệt độ trong ví dụ trên đây).
Chương 3 : các khâu điỀu khiỂn hoẠt đỘng trong miỀn thỜi gian
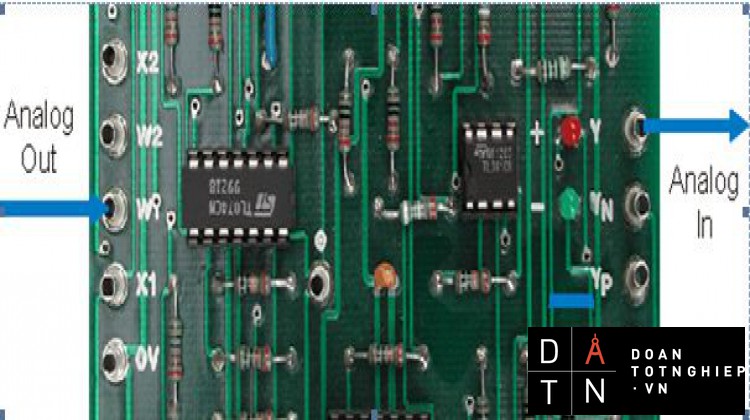
- Card thí nghiỆm "Các mô phỎng vỀ hỆ thỐng đưỢc điỀu khiỂn” SO4201-5U
- Giới thiệu chung
Card thí nghiệm ‘Các mô phỏng về hệ thống được điều khiển’ của hệ thống UNI-TRAIN-I chứa một loạt các phần tử truyền đặc trưng dùng để nối ghép thành các hệ thống được điều khiển thực tế. Các phần tử truyền được thiết kế như các mạch điện tử tương tự (các bộ khuếch đại thuật toán được chạy dây) hoặc như các thuật toán số (với các bộ chuyển đổi A/D và D/A nối tiếp lên và xuống). Các phần tử truyền thực tế có thể được phối hợp với nhau theo tuỳ ý để tạo ra các hệ thống được điều khiển phức tạp.
Dưới đây là danh sách chi tiết về các phần tử truyền có sẵn trong hệ thống.
- Phần tử tác động tỷ lệ P (khâu tỷ lệ) với hệ số tỷ lệ có thể điều chỉnh được.
- Phần tử tác động theo tích phân I (khâu tích phân) với hằng số thời gian tích phân TI = 1/KI (trong đó KI là hệ số tác động theo tích phân). Khi kết hợp với bộ điều khiển PID thì hằng số thời gian này cũng được coi như là hằng số tác động theo tích phân TN.
- Hai phần tử giữ chậm thời gian bậc nhất P-T1 (các khâu tỷ lệ có giữ chậm ) với các hằng số thời gian thay đổi.
- Ðặc tuyến phi tuyến f(x).
- Thuật toán số lập trình được (ví dụ để mô phỏng trễ).
- Khâu lấy tổng (ví dụ để cộng các tín hiệu can nhiễu vào). Một mức tín hiệu cố định 2,5V được cấp tới ổ cắm Z ở phía trên. Tín hiệu này được cấp tới khâu lấy tổng hoặc thông qua một giãm chuyển mạch (jumper) hoặc nó có thể được nối tự động thông qua hàm "Reference variable/disturbance variable" trong L@Bsoft. Biến can nhiễu thích hợp với card thí nghiệm này là biến can nhiễu 1 (xem trợ giúp L@Bsoft-Help về hàm "Reference variable/disturbance variable").
Card thí nghiệm có thể được kết hợp với card bộ điều khiển PID SO4201-5R cũng như card bộ điều khiển 2 vị trí /3 vị trí SO4201-5S để tạo thành các vòng điều khiển kín. Trong phạm vi khoá học của chúng ta các bạn sẽ làm việc với cả 2 kiểu bộ điều khiển trong các chương tương ứng. Ðối với trễ mô phỏng các bạn có thể sử dụng khối có nhãn là Algorithm có thể được cấu hình để sử dụng trễ trong thiết bị ảo Lag element (xem màn hình trích dưới đây). Ðộ trễ mong muốn sau đó có thể được điều chỉnh với độ phân giải được cho bởi thời gian đặt hiện tại.
- Phân loẠi các phẦn tỬ cỦA vòng điỀu khiỂn
- Khái niệm về một “phần tử truyền” (khâu truyền)
Tất cả mọi thành phần của một vòng điều khiển có thể được coi như là các phần tử truyền hay các khâu truyền. Các khâu truyền nhận (các) đặc tính tín hiệu đầu vào cho trước của (các) biến đầu vào của chúng và tạo ra (các) đặc tính của (các) biến đầu ra trực tiếp theo các mối quan hệ vật lý nhất định. Quan trọng đặc biệt đối với các kỹ sư điều khiển tự động là các phần tử truyền (khâu) tuyến tính với tính nội trội về áp dụng nguyên lý xếp chông tín hiệu. Tính phức tạp của một hệ thống truyền tuyến tính được định nghĩa bởi bậc của nó (đó là số các phần tử tích luỹ nãng lượng có trong hệ thống ). Khâu RC được mô tả trên hình con có một phần tử tích luỹ nãng lượng (đó là tụ điện) và do vậy nó tao ra một khâu động học bậc nhất. Nếu điện áp đầu vào uin được cấp cho mạng tại thời điểm t = 0, thì kết quả đối với điện áp đầu ra uout như đã biết là đường cong nạp của tụ điện và nó có dạng là một hàm mũ.
Hình dưới đây trình bày một mạch điện cộng hưởng nối tiếp có chứa một điện trở R , một cuộn cảm L và một tụ điện C.
Trong công nghệ điều khiển tự động thì các khâu truyền thường được biểu diễn như là một cấu trúc khối mà không quan tâm đến cấu trúc vật lý thực tế của chúng (điện, cơ học,...). Hãy xét hình dưới đây. Một hệ thống như vậy sẽ có một hoặc nhiều biến đầu vào (chữ y in thường) và một hoặc nhiều biến đầu ra (chý x in thường). Bằng việc kết hợp nhiều khối hệ thống đơn lẻ (nối tiếp hoặc song song) thì ta có thể tạo ra được mọi cấu trúc hệ thống phức tạp một cách rõ ràng và dễ hiểu.
- Các kiểu khâu truyền tuyến tính
Tất cả khâu truyền tuyến tính có thể được tạo thành từ các khâu cơ sở bậc thấp (ví dụ bậc không, bậc nhất và bậc hai). Ở đây cần phân biệt các phần tử có bù và phần tử không có bù. Các phần tử có bù là các phần tử mà các biến đầu ra của chúng luôn cố đạt các giá trị đầu ra hữu hạn khi đáp ứng lại các biến đầu vào dạng tín hiệu bậc thang. Còn các phần tử không có bù là các phần tử mà các biến đầu ra của chúng tăng theo một tỷ lệ không đổi. Một ví dụ về khâu không có bù là một bể nước có mực nước tăng lên với một tỷ lệ không đổi khi được nạp với một dòng nạp không đổi cho đến khi nước bị tràn ra.
Ðáp ứng đặc trưng của khâu truyền có bù (trái) và không có bù (phải) đối với tín hiệu bậc thang
Bạn hãy đưa ra một ví dụ về khâu truyền không có bù. Hãy trả lời vào hộp trả lời dưới đây
|
Một đặc điểm khác biệt khác nữa của các khâu tuyến tính là hiệu ứng giữ chậm thời gian của khâu. Sự khác biệt ở đây được trình bày đối với các phần tử có giữ chậm và các phần tử không có giữ chậm. Hình dưới đây trình bày tổng quan về một khả năng giữ chậm của các phần tử tuyến tính.
Khâu RC trên đây là một hệ thống có bù hay không có bù? Hãy trả lời và trình bày lý do vì sao vào hộp trả lời dưới đây!
|
Đáp Ứng tĩnh và đáp Ứng đỘng cỦa các phẦn tỬ vòng điỀu khiỂn
- Đáp ứng tĩnh của hệ thống
Khi phân tích các phần tử vòng điều khiển thì ta cần phân biệt giữa đáp ứng động (đáp ứng theo thời gian) và đáp ứng tĩnh (đáp ứng ở trạng thái thiết lập) của phần tử. Nếu các bạn xét, ví dụ đáp ứng của hệ thống đối với sự thay đổi bậc thang của biến đầu vào, thì nhìn chung đó được coi là đáp ứng nhảy bậc (xem hình dưới đây), còn đáp ứng tĩnh được đặc trưng bởi trạng thái thiết lập x0 của biến đầu ra, nghĩa là giá trị tương ứng mà hệ thống đạt được sau khi đáp ứng tác động ngắn tắt dần.
Quan hệ giữa biên độ đầu ra và biên độ đầu vào được xác định bởi hệ số tỷ lệ Kp của hệ thống được điều khiển (cũng thường được gọi “hệ số khuếch đại hệ thống”). Biểu thức dưới đây nói lên điều đó.
Khi các bạn xác định tỷ lệ x0/y0 cho các điểm làm việc khác nhau (nghĩa là các biên độ khác nhau của tín hiệu bậc thang) y0 và đưa các kết quả vào một đồ thị thì kết quả các bạn có được được gọi là đặc tuyến tĩnh của hệ thống. Trong một hệ thống tuyến tính thì hệ số tỷ lệ không phụ thuộc vào điểm làm việc; mà ở đây nó chỉ ảnh hưởng lên một đặc tuyến tuyến tính có độ dốc phụ thuộc vào hệ số tỷ lệ của hệ thống .
Đặc tuyến tĩnh của một hệ thống tuyến tính
Các bạn bây giờ có thể ghi lại đặc tuyến tĩnh của phần tử PT1 ở bên trái . Muốn làm được các bạn cần cấp nguồn điện áp một chiêu DC từ 0 đến 10V (với mức tăng 1V cho mỗi lần) tới đầu vào y = y3 và các bạn dùng một đồng hồ vôn kế để xác định điện áp đầu ra ở trạng thái thiết lập x = x3 . Các bạn hãy đưa các gía trị nhận được vào trong bảng dưới đây và xác định đặc tuyến tĩnh của phần tử.
.........................................................
Tham số KP được gọi là hệ số tỷ lệ của bộ điều khiển PID, tham số TN là thời gian thiết lập và tham số TV được gọi là thời gian tỷ lệ. Biến được tác động do bộ điều khiển PID tạo ra trong đáp ứng tức thời với sự thay đổi tín hiệu bậc thang đầu vào về lý thuyết là lớn vô cùng vì nó là giá trị vi phân của sường lên của hàm bậc thang; nhưng trong thực tế nó bị giới hạn bởi các điều kiện hạn chế của kỹ thuật.
|
- Thực thi kỹ thuật các bộ điều khiển PID
Ngày nay các thuậ bộ điều khiển PID tương tự thường được thiết kế dưới dạng các mạch khuếch đại thuật toán, trong đó các tham số của bộ điều khiển được tạo thành bởi các linh kiện điện tử có thể điều chỉnh được một cách thích hợp trong các mạch đầu vào hoặc mạch phản hồi của bộ khuếch đại thuật toán. Sơ đồ dưới đây trình bày mạch điện kiểu như vậy của bộ điều khiển PID, trong đó các tham số của nó có thể đặt mở rộng theo yêu cầu mong muốn.
Bộ khuếch đại thuật toán OV4 dùng để làm gì? Công dụng của công tắc chuyển mạch S và điện trở R3 dùng để làm gì? Hãy trả lời vào hộp trả lời dưới đây!
- Thí nghiệm : Bộ điều khiển PID trong một hệ thống được điều khiển PT2
Trong thí nghiệm dưới đây các bạn sẽ khảo sát một vòng điều khiển được thiết lập bởi một bộ điều khiển PID và một hệ thống được điều khiển PT2 . Ðáp ứng của vòng điều khiển kín sẽ được so sánh với đáp ứng của các vòng điều khiển với các bộ điều khiển tỷ lệ P, bộ điều khiển tích phân –tỷ lệ PI và bộ điều khiển tỷ lệ - vi phân PD.
Các bạn hãy thiết lập mạch diện thí nghiệm như sơ đồ cho trên hình dưới đây và cấu hình các tham số của card thí nghiệm bộ điều khiển PID sao cho nó hoạt động như một bộ điều khiển PID và đặt các tham số của nó theo các giá trị sau: KP = 2, TN = 0.1 s và TV = 0.01 s.
Các bạn hãy kích hoạt trình vẽ biểu đồ thời gian và cấu hình nó theo bảng cho dưới đây.
|
Thiết lập đầu vào |
||
|
Kênh A |
Dải đo: 10 V |
Chế độ hiển thị: DC |
|
Kênh B |
Dải đo: 10 V |
Chế độ hiển thị: DC |
|
Các kênh khác |
Dải: 100 |
Offset: 0 |
|
Thiết lập đầu ra |
||
|
Tín hiệu bậc thang thay đổi từ ... đến ... |
0 |
50% |
|
Thời gian trễ /ms |
0 |
|
|
Số lần đo |
300 |
|
|
Thiết lập đồ thị |
||
|
Hiển thị |
Kênh A và B |
|
|
Trục x từ ... đến ... |
0 |
0.5 s |
|
Trục y từ ... đến ... |
0 |
100 |
Bây giờ các bạn đi xác định đáp ứng bậc thang (biến tham chiếu và biến được điều khiển) của vòng điều khiển kín và sao chép nó vào khoảng trống trong ô dưới đây.
Bộ điều khiển PID trong một hệ thống được điều khiển PT2
Các bạn hãy mô tả dặc tuyến đáp ứng bậc thang của vòng điều khiển. Các bạn có đánh giá gì về đáp ứng bậc thang của nó khi so sánh với đáp ứng bậc thang của các vòng điều khiển trong các hệ thống với các khâu P, PI và PD trước đó? Hãy trả lời vào hộp trả lời dưới đây!
|
- BỘ điỀu khiỂn rỜi rẠc
- Card thí nghiỆm vỀ bỘ điỀu khiỂn 2 vỊ trí / 3vỊ trí SO4201-5S
- Giới thiệu chung:
Card thí nghiệm của hệ thống UNI-TRAIN-I về bộ điều khiển 2 vị trí /3 vị trí (Two/Three-position controller) là một mô-đun làm việc như một đối tượng trong lĩnh vực công nghệ điều khiển tự động. Các bộ điều khiển 2 vị trí /3 vị trí thông thường được sử dụng trong các hệ thống điều khiển đa năng gián đoạn.
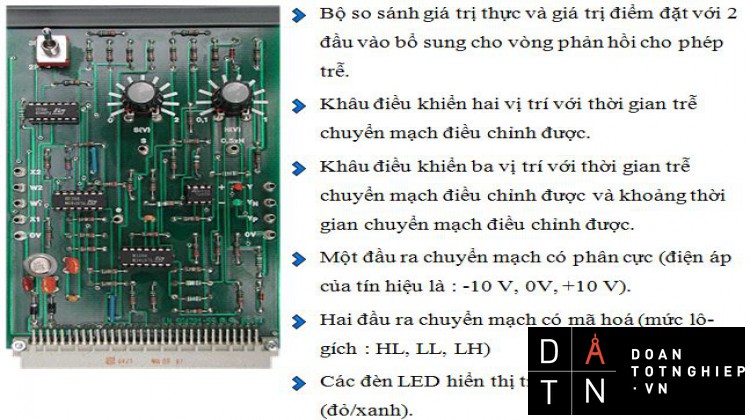
Bộ điều khiển 2 vị trí /3 vị trí bao gồm một mạch điện tính toán số học (các bộ khuếch đại thuật toán được nối với nhau) với các biến trở và các công tắc chuyển mạch để thiết lập cấu hình và đặt các tham số . Chế độ làm việc của bộ điều khiển 2 vị trí /3 vị trí có thể được chọn trong quá trình làm việc. Các tham số được duy trì trong quá trình làm việc, còn các tham số không thích hợp tự động bị loại bỏ. Card thí nghiệm như một tổng thể bao gồm các đặc điểm sau
|
Bộ so sánh giá trị thực và giá trị điểm đặt với 2 đầu vào bổ sung cho vòng phản hồi cho phép trễ. |
||
|
Khâu điều khiển hai vị trí với thời gian trễ chuyển mạch điều chỉnh được. |
||
|
Khâu điều khiển ba vị trí với thời gian trễ chuyển mạch điều chỉnh được và khoảng thời gian chuyển mạch điều chỉnh được. |
||
|
Một đầu ra chuyển mạch có phân cực (điện áp của tín hiệu là : -10 V, 0V, +10 V). |
||
|
Hai đầu ra chuyển mạch có mã hoá (mức lô-gích : HL, LL, LH) |
||
|
Các đèn LED hiển thị trạng thái làm việc (đỏ/xanh). |
||
|
|
|
- Các thông số kỹ thuật
Card thí nghiệm về bộ điều khiển 2 vị trí /3 vị trí có các đặc tính kỹ thuật sau:
|
Ðiện áp làm việc : |
+/-15V thông qua đầu cắm Bus |
|
Các đầu vào : |
Cho 4 đầu vào +/-10 V, Ri=10 kiloohm,thông qua các lỗ cắm 2mm . |
|
Các đầu ra : |
3 đầu ra +/-10 V, 10mA, thông qua các lỗ cắm 2mm . |
|
Các dải thiết lập : |
Ðộ trễ = 0.1 to 1 V |
|
Kích thước: |
Card theo tiêu chuẩn Euro 160 x 100 mm |
|
Trọng lượng: |
0.,25 kg |
- Các phần tử làm việc và các lỗ cắm
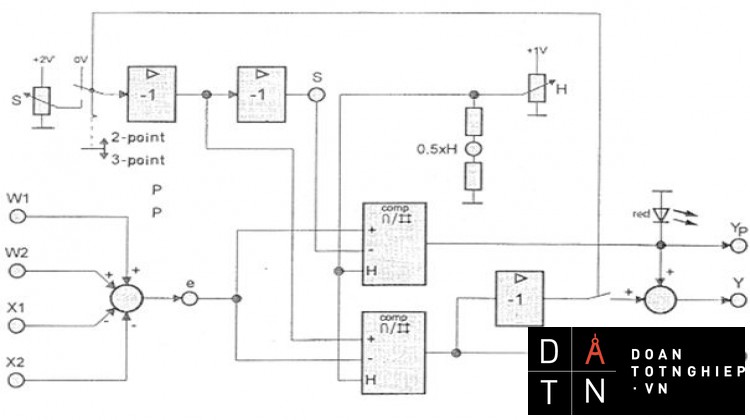
- Sơ đồ mạch điện khối
Hình cho dưới đây minh hoạ sơ đồ mạch điện khối của card thí nghiệm.
- Biến trở độ trễ H
Với bộ điều khiển này có thiết lập độ trễ chuyển mạch (độ lệch giữa mức chuyển mạch bật và tắt). Nó cũng được bố trí đối xứng với điểm chuyển mạch S. Ðộ trễ chuyển mạch thay đổi tần số chuyển mạch của hệ thống điều khiển, và đồng thời điều khiển giá trị vi phân tạm thời. Một thiết lập tối ưu chỉ có thể được thực hiện khi có tính đến các dữ liệu của hệ thống được điều khiển. Dải thiết lập đối với độ trễ chuyển mạch là:
H = 0.1V...1V
- Phép đo độ trễ đầu ra 0.5xH
Ðể thiết lập chính xác độ trễ thì điện áp đầu ra đo có thể cần phải được đo. Do vây biểu thức dưới đây được áp dụng để tính độ trễ :
H = giá trị đo được x 2
- Ðiểm chuyển mạch S
Việc thiết lập các điểm chuyển mạch chỉ có ý nghĩa đối với bộ điều khiển 3 vị trí. Trong bộ điều khiển 2 vị trí thì các điểm chuyển mạch là không đổi và tự động bằng 0V. Trong khi bộ điều khiển 2 vị trí chỉ tính toán 2 trạng thái của biến được điều khiển X, thì bộ điều khiển 3 vị trí lại có thể phân biệt được 3 trạng thái.. Và dưới đây là các đặc điểm của bộ điều khiển 2 vị trí:
- Nếu biến được điều khiển X quá cao, thì đầu ra Y chuyển về giá trị 0V. Ðiều này dẫn đến tắt bỏ dòng khối trọng hoặc dòng năng lượng.
- Nếu biến được điều khiển X quá thấp thì đầu ra Y chuyển về giá trị >10V. Ðiều này dẫn đến cho phép bật dòng khối trọng hoặc dòng năng lượng.
Dưới đây là các đặc điểm của bộ điều khiển 3 vị trí
- Nếu biến được điểu khiển X quá cao thì đầu ra Y chuyển về giá trị <-10V. Ðiều này dẫn đến giảm dòng khối trọng hoặc dòng năng lượng.
- Nếu biến được điều khiển X quá thấp thì đầu ra Y chuyển về giá trị >10V. Ðiều này dẫn đến làm tăng dòng khối trọng hoặc dòng năng lượng.
- Nếu biến được điêu khiển X trong dải “cho phép” thì đầu ra Y chuyển về giá trị 0V. Ðiều này dẫn đến một trạng thái thiết lập và dòng khối trọng hoặc dòng năng lượng giữ nguyên không thay đổi.
Với biến trở điểm chuyển mạch S thì vị trí của điểm chuyển mạch và do vậy mà cả “dải cho phép” được xác định. Ðộ trễ do vậy mà lúc nào cũng đối xứng với điểm chuyển mạch và các điểm chuyển mạch luôn đối xứng qua giá trị sau:
w - x = e = 0V
- Phép đo điểm chuyển mạch S của đầu ra
Ðể thiết lập chính xác điểm chuyển mạch thì điện áp có thể được đo tại đầu ra đo có nhãn là “điểm chuyển mạch”. Ta có các biểu thức sau:
- Ðiểm chuyển mạch dương = giá trị đo của S x 1
-
Ðiểm chuyển mạch âm = giá trị đo của S x -1
- Công tắc chuyển đổi vị trí của bộ điều khiển 2 vị trí /3 vị trí
Chế độ làm việc của bộ điều khiển 2 vị trí /3 vị trí có thể được chọn trong quá trình làm việc thông qua công tắc chọn chế độ và các chức năng nào phù hợp với chế độ làm việc thì giữ nguyên không thay đổi còn những chức năng nào không phù hợp thì tự động được gỡ bỏ. Các chức năng đó bao gồm:
- Ở chế độ bộ điều khiển 2 vị trí thì công tắc chuyển mạch S luôn bật về 0V.
- Ở chế độ bộ điều khiển 3 vị trí thì đầu chính Y chỉ cấp mức tín hiệu 0V và >10V.
Tất cả mọi chức năng đều phụ thuộc vào chế độ làm việc tương ứng .
- Các đầu vào điểm đặt W1, W2
Các đầu vào điểm đặt w1, w2 là các đầu vào cộng của bộ so sánh giá trị thực - giá trị điểm đặt. Dải điện áp của tín hiệu cho phép là:
Uw = -10...+10
- Các đầu vào giá trị thực X1, X2
Các đầu vào giá trị thực x1, x2 là các đầu vào trừ của bộ so sánh giá trị thực - giá trị điểm đặt. Dải điện áp của tín hiệu cho phép là:
Ux = -10V...+10V
- Phép đo tín hiệu sai lệch e ở đầu ra
Ðầu ra của bộ khuếch đại thuật toán cung cấp tín hiệu sai lệch e được lấy ra từ bộ so sánh giá trị thực – giá trị điểm đặt.Dải điện áp của tín hiệu cho phép là:
Ue = -10V...+10V với tải cực đại 10mA.
Tín hiệu sai lệch e cũng là tín hiệu đầu vào tác động của hệ thống điều khiển. Ta có biểu thức sau:e = w1 + w2 - x1 - x
- Ðầu ra chính Y
Ðầu ra này của bộ khuếch đại thuật toán cung cấp biến được tác động có phân cực Y mà nó có nghĩa là:
Ba trạng thái chuyển mạch của bộ điều khiển 3 vị trí được thực hiện bằng các mức tín hiệu >10V, 0V, <-10V (còn bộ điều khiển 2 vị trí thì chỉ có thể thực hiện với các mức điện áp >10V and 0V).
- Các đèn hiển thị LED
Các trạng thái chuyển mạch của bộ điều khiển 2 vị trí /3 vị trí luôn luôn được hiển thị bằng các đèn LED.
Ðối với bộ điều khiển 2 vị trí các đèn LED làm việc như sau:
|
Y > 10V (đèn LED đỏ sáng lên) |
|
Y = 0V (đèn LED xanh sáng lên) |
Ðối với bộ điều khiển 3 vị trí các đèn LED làm việc như sau:
|
Y > 10V (đèn LED đỏ sáng lên) |
|
Y = 0V (không có đèn LED nào sáng) |
|
Y < -10V (đèn LED xanh sáng lên) |
- Các đầu ra chuyển mạch YP, YN
Các đầu ra của bộ khuếch đại thuật toán số này (0V, 10V) cấp tín hiệu cho biến được tác động đã được mã hoá theo nhị phân với các trọng số như sau:
|
Y |
YP |
YN |
|
10V |
10V |
0V |
|
0V |
0V |
0V |
|
-10V |
0V |
10V |
- BỘ điỀu khiỂn 2 vỊ trí
- Bộ điều khiển 2 vị trí không có trễ
Bộ điều khiển 2 vị trí là một bộ điều khiển kiểu gián đoạn, nếu các bạn thay đổi tín hiệu sai lệch e(t) (biến đầu vào của bộ điều khiển) một cách liên tục, thì biến được tác động y(t) (biến đầu ra của bộ điều khiển) thay đổi một cách đột ngột, có nghĩa là không liên tục khi đáp ứng theo các biến đầu vào nhất định. Nó chỉ có thể chấp nhận 2 giá trị gián đoạn là yP và yN. Việc chuyển mạch giữa 2 giá trị được thực hiện khi tín hiệu sai lệch e(t) = 0. Do vậy mà kiểu bộ điều khiển này cũng còn được gọi là bộ điều khiển chuyển mạch . Chúng đặc biệt thích hợp như một giải pháp cho các hoạt động điều khiển tương đối dễ thực thi với giá thành hạ (ví dụ các bộ điều khiển nhiệt độ đơn giản) hoặc điều khiển các khâu chấp hành có hai điểm làm việc.
Bộ điều khiển 2 vị trí dựa trên các ống mao dẫn chất lỏng
Hình cho dưới đây trình bày đặc tính chung và ký hiệu khối của bộ điều khiển 2 vị trí.
Một trường hợp tương đối phổ biến là yN = 0 (ví dụ trong các bộ điều chỉnh nhiệt độ của bàn là hay của tủ lạnh) hoặc khi các biến được tác động cao hơn và thấp hơn đối xứng nhau (yN = -yP).
- Bộ điều khiển 2 vị trí có trễ
Như chúng ta sẽ thấy khi cùng nhau làm việc trong tương lai thì bộ điều khiển 2 vị trí đơn giản thường tạo ra một đáp ứng điều khiển không đảm bảo, vì các biến được tác động luôn liên tục bị chuyển mạch. Ðể ngăn ngừa hiện tượng này các bạn có thể đưa vào một tín hiệu được gọi là trễ ed, mà nó có nhiệm vụ không nhiều thì ít khống chế hay trừ khử quá trình chuyển mạch không đổi này. Ðặc tính và ký hiệu khối của bộ điều khiển 2 vị trí có trễ này được trình bày trong hình cho dưới đây .
- Thí nghiệm
Trong thí nghiệm dưới đây các bạn sẽ ghi lại đặc tính của bộ điều khiển 2 vị trí trên hệ thống thí nghiệm UNI-TRAIN-I với 2 giá trị độ trễ khác nhau ed. Ðể chọn điện áp đầu vào công nghệ hãy sử dụng thiết bị ảo DC voltage source và dùng thiết bị ảo Voltmeter A để đo điện áp đầu ra. Các bạn hãy thiết lập mạch điện thí nghiệm như sơ đồ cho trên hình dưới đây.
Các bạn hãy thiết lập card thí nghiệm về chế độ bộ điều khiển 2 vị trí (công tắc chuyển chế độ bật về vị trí 2P) và thiết lập các giá trị tham số bằng cách điều chỉnh biến trở độ trễ H(V) về giá trị khoảng 0.4 V. Và bây giờ các bạn hãy bắt đầu với điện áp đầu vào là -1 V, sau đó tăng dần từng bước với độ tăng 0.2 V cho đến khi đạt được +1 V và sau đó lại giảm ngược xuống -1 V với bước giảm là 0,2 V. Các bạn hãy xác định điện áp đầu ra tương ứng của bộ điều khiển (đầu ra Y của card thí nghiệm) và nhập các kết quả vào bảng cho dưới đây. Từ bảng này các bạn tiếp tục đi chế độ đặc tính của bộ điều khiển
Các kết quả đo với H = 0.4 V.
Các bạn hãy lặp lại nội dung thí nghiệm trên đây với độ trễ chuyển mạch là 0.8 V. Và sau đó nhập các kết quả vào bảng cho dưới đây và tiếp tục tìm ra đặc tính của bộ điều khiển.
Các kết quả đo với độ trễ H = 0.8 V
- BỘ điỀu khiỂn 3 vỊ trí
- Ðặc tính của bộ điều khiển 3 vị trí
Không giống như bộ điều khiển 2 vị trí, ngoài các biến yP và yN thì bộ điều khiển 3 vị trí còn giá trị biến được tác động thứ ba với giá trị bình thường bằng 0. Dải giá trị này có thể được hiểu như là vùng không nhạy cảm, mà trong phạm vi của vùng đó thì bộ điều khiển không phản ứng với tín hiệu sai lệch (có nghĩa là với biến được tác động 0). Một ví dụ tiêu biểu là việc điều khiển một động cơ chấp hành (ví dụ cho một hệ thống truyền động) với 3 chế độ làm việc: quay thuận, đứng yên và quay ngược. Khoảng không nhạy cảm được gọi là eS.
Bộ điều khiển 3 vị trí công nghiệp kiểu có rãnh treo DIN.
Hình dưới đây trình bày đặc tính chung và ký hiệu khối của bộ điều khiển 3 vị trí không có trễ. Các giá trị đối xứng cũng được tính đến trong trường hợp này, có nghĩa là yN = -yP.
Bộ điều khiển 3 vị trí cũng có thể được cấp vào độ trễ để giảm tần số chuyển mạch. Ðiều này dẫn đến đặc tính được trình bày dưới đây. Ðộ trễ chuyển mạch ở đây cũng được gọi là ed . Bình thường nó có giá trị giống như giá trị tại điểm chuyển mạch sang trái và sang phải.
TỔng kẾt
&
Trong suốt quá trình thực hiện đồ án tốt nghiệp về đề tài : “bộ thí nghiệm multilab – điều khiển PID” chúng em đã thu được kết quả sau :
- Tìm hiểu về công nghệ điều khiển vòng kín – điều khiển vòng hở.
- Tìm hiểu về các khâu trong bộ điều khiển PID.
- Thí nghiệm đáp ứng của các khâu.
Ưu điểm :
- Hoàn thành được thí nghiệm.
- Rút ra được kết luận.
Nhược điểm :
- Chưa hiểu được hết bản chất phần cứng cũng như phần mềm.
- Một số bài thí nghiệm không như kết quả tính được.
Hướng phát triển của đề tài
Do đây là một bộ thí nghiệm nên phải hiểu bản chất của nó soạn ra được nhiều bài học và bài tập hay để đem vào giảng dạy trong nhà trường một cách trực quan sinh động giup cho học sinh – sinh viên nắm bắt được vấn đề nhanh.
Bộ điều khiển PID là bộ điều khiển thông dụng nhất nên từ những thí nghiệm này chúng ta có thể giám sát và điều khiển nhiều thiết bị một cách chính xác…
Tài liỆu tham khẢo
&
Lý thuyết điều khiển tự động _ nguyễn thị phương hà – huỳnh thái hoàng. Nxb ĐHQg Tp HCM.
Trang web của nhà sản xuất http://www.lucas-nuelle.com/308/apg/1986/Process+Control.htm.
Một số tài liệu từ Internet (www.picvietnam.com, www.dientuvietnam.net …).











