ĐIỀU KHIỂN ROBOT TRONG CUỘC THI ROBOT DÒ ĐƯỜNG
NỘI DUNG ĐỒ ÁN
ĐIỀU KHIỂN ROBOT TRONG CUỘC THI ROBOT DÒ ĐƯỜNG, thuyết minh, động học máy, kết cấu máy, nguyên lý máy, cấu tạo máy, quy trình sản xuất
PHẦN 1 : GIỚI THIỆU VỀ YÊU CẦU CÔNG NGHỆ
1.GIỚI THIỆU VỀ THỂ LỆ CUỘC THI ROBO
Trong những năm qua các đội tuyển cửa Đại học Đà Năng đã tham gia cuộc thi sáng tạo Robot Việt Nam và đạt được một số thành tích rất đáng ghi nhận. Với đích giảI quyết bàI toán dò đường,một vấn đề hết sức cơ ban cửa cuộc thi sáng tao Robot Việt Nam , đồng thời mởi rộng sân chơi cho nhiều sinh viên có khả năng tham gia. Nội dung Robot Dò Đường như sau:
- sân thi đấu
(1)sàn sân thi đấu được làm bằng các tấm nhựa vinyl có độ dài 2 mm
(2)Sân thi đấu được bao quanh băng một rào cán gỗ dài 50mmvà cao 1000mm
(3)Sân thi đấu bao gồm vùng dẫn đường (vùng a): vùng không dẫn đường (vùng b):vùng cầu(vùng c). xem chii tiết trên sân thi đấu
(4) vùng dẫn đường-vùng a
- vùng a là hình chữ nhật có kích thước 5000mm*10000mm
- tất cả bốn bên của vùng a được bao băng hàng rào gỗ dày 50mm và cao 1000mm ngoại trừ một lối đI sang vùng b có chiều rộng 3000mm
- trên vùng a có các đường dẫn màu trắng, rộng 30mm. Tại một số đIểm trong vùng a sẽ có tấm đệm hình vuông 100mm*100mm, dày 10mm. Trên các tấm đệm này không có dường dẫn. Các tấm đệm được sơn màu bất kì( trắng, đỏ, xanh)
- khu xuất phát có kích cỡ 400mm*400mm ddược đặt ở khu vực trung tâm pháo dưới vùng của vùng a.
(5) vùng không dẫn đường-vùng b
- vùng không dẫn đườngb là một vùng nằm ở vùng bên trái vùng a.
- ba bên: pháI sau, bên trái và bên phải của vùng b được bao bằng hàng rào gỗ dày 50mm và cao 100mm ngoại trừ một đường đi từ vùng a sdang có xhiều rộng 3000mm
- ở chính giữa, phía trước của vùng b có một đường dẫn thẳng lên cầu màu trắng, rộng 30mm, dài 1500mm
(6)vùng cầu -vùng c
- Vùng cầu năm ở phía trên , chính giửa vùng B. Đầu cầu dàI 1000mm, có độ nghiên 15. Bể rộng cửa cầu có kích thước 800 – 10000 mm. Trên cầu có đường dẫn mầu trắng, rộng 30mm. Cuối cầu là đích phảI đến. Xem bản vể để xem chi tiết.
2.ROBOT
Mổi đội tham gia phảI chế tạo ROBOT tự động với yêu cầu như sau:
- Kích cở bắt buộc:400*400mm. Chiều cao Robot không hạn chế.
- Khối lượng của Robot phải lớn hơn 08Kg. Tổng khối lượng của cả Robot.
- Robot chỉ được khởi động một lần duy nhất.Sau khi robot đã khởi động các thành viên của đội không được đụng vào Robot.
- Nguòn năng lượng cung cấp cho Robot <=24V.
- ROBOT phải đi theo hương dẫn trong vùng A,sau đó đến vùng B xong đến đích.
2.Ý TƯỞNG SÁNG TẠO SỬ DỤNG PLC LAP TRINH CHO ROBOT
Trước như tính năng ưu việc PLC nhóm sư dụng PLC điêù kiển con robot , vì cuộc thi không có tinh đối kháng cho nên trong đồ án nay chỉ đề cập đến việc lập trình cho robot chay về dích trong thời gian nhanh nhất.
3.THIẾT KẾ VÀ CHẾ TẠO:
3.1Robot Tự Động:
a/ Phần đế của Robot:
Phần đế của Robot được chế tạo đặc biệt để có thể hoạt động chính xác bằng cảm biến dò đường.Do vậy Robot tự động có kết cấu đế hình vuông sử dụng 2 bánh truyền động (độc lập) và 2 bánh đa hướng được bố trí cân đối giúp cho Robot có thể chuyển động theo vòng tròn trên sân và có thể xoay tròn quanh tâm.Với 2 động cơ truyền động độc lập và mỗi động cơ có 2 cấp tốc độ, do đó cho phép Robot có nhiều trạng thái chuyển động.
Robot chuyển động chính xác nhờ vào bảng cảm biến gồm có 5 cảm biến dò đường và một cảm biến đếm vạch.
Cảm biến dẫn đường nhận vạch trắng dùng tia hồng ngoại, sử dụng các linh kiện có bán sẵn trên thị trường.
* Hoạt động của mạch:
Ngõ ra của mạch triger ban đầu ở mức 0, ngõ ra chỉ đổi trạng thái sang1 khi áp kích khởi có biên độ lớn hơn 2/3 Vcc. Điều này có được bằng cách kích dẫn Transistor phát hiện cân bằng của cầu R1,R2,Vr1và D1. R1,R2 tạo thành một nhánh cầu và đặt một điện áp bằng 1/2 điện áp nguồn lên colector của Transistor Q1 và Vr1, D1 tạo thành một nhánh khác và đặt một điện áp phụ thuộc vào cường độ hồng ngoại lên cực Baz của Q1.
Dưới điều kiện không có tín hiệu nhận được từ D1 thì Q1 không dẫn. Khi nhận được tín hiệu từ led phát thì D1 dẫn đưa điện áp kích vào chân 2 của IC555, ngõ ra sẽ có trạng thái 1.
Trang bị điện tử trên robot tự động
Cảm biến : cảm biến sử dụng cho ROBOT có 2 loại:
- Cảm biến dẫn đường nhận vạch trắng dùng tia hồng ngoại (sơ đồ chi tiết được trình bày ở phần trên).
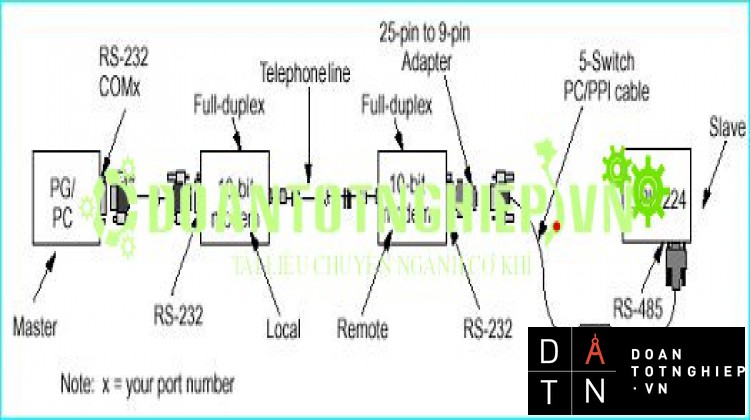
Thiết bị điều khiển: sử dụng bộ điều khiển PLC S7-200 họ C212 với 1 module mở rộng.Bao gồm 12 đầu vào và 10 đầu ra . PLC S7- 200 với nhiều ưu điểm:
Tín hiệu điều khiển từ PLC là tín hiệu áp 24v. Qua ma trận Diode để mã hoá theo mạch tổ hợp Relay điều khiển trạng thái hoạt của các động cơ.
Trạng thái di chuyển của Robot
|
Trạng thái di chuyển |
Động cơ bên phải |
Động cơ bên trái |
|
Dừng |
0 |
0 |
|
Chạy thẳng |
1 |
1 |
|
Rẽ trái |
1 |
0 |
|
Rẽ phải |
0 |
1 |
|
Xoay trái |
1 |
-1 |
|
Xoay phải |
-1 |
1 |
|
|
|
|
Qui ước: 0 dừng ; 1 chạy tới; -1 chạy lui
b/Phần thân của Robot:
Hình dạng ROBOT tuy ý , tuỳ theo hình dáng lựa chọn cho tăng tính thẩm my cho ROBOT.
3.3HOẠT ĐỘNG:
Robot có thể hoạt động theo chiến thuật đã lập trình sẵn như sau :
Chiến thuật :
Ban đầu Robot được đặt ở giữa tâm của vùng xuất phát sao cho cảm biến nhận đúng vạch trắng dẫn hướng trên sân . Khi xuất phát nhờ được điều khiển bằng cảm biến dò đường Robot sẽ di chuyển thẳng theo vạch trắng cho đến khi cảm biến đếm vạch phát hiện được đúng số vạch thì sẻ thực hiện
Xoay phải,trái theo chi dẫn. Đến vùng B cho ROBOT chạy mù ,tiếp nhận vùng A thì băt đầu chạy chậm về đích.
..................................................................




