ĐỒ ÁN TỐT NGHIỆP CẢI TIẾN MÁY CẮT KHẮC LASER 2W bằng phần mềm ARDUINO





NỘI DUNG ĐỒ ÁN
TÊN ĐỀ TÀI: ĐỒ ÁN TỐT NGHIỆP CẢI TIẾN MÁY CẮT KHẮC LASER 2W bằng phần mềm ARDUINO
NỘI DUNG YÊU CẦU CỦA ĐỀ TÀI:
- PHẦN BẢN VẼ
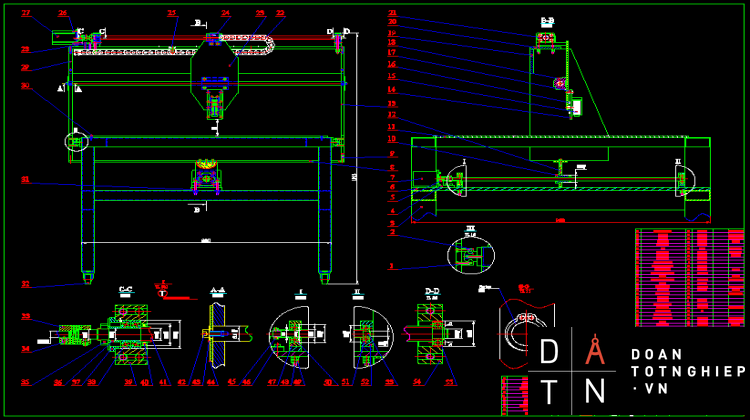
- Bản vẽ sơ đồ nguyên lý máy –A0
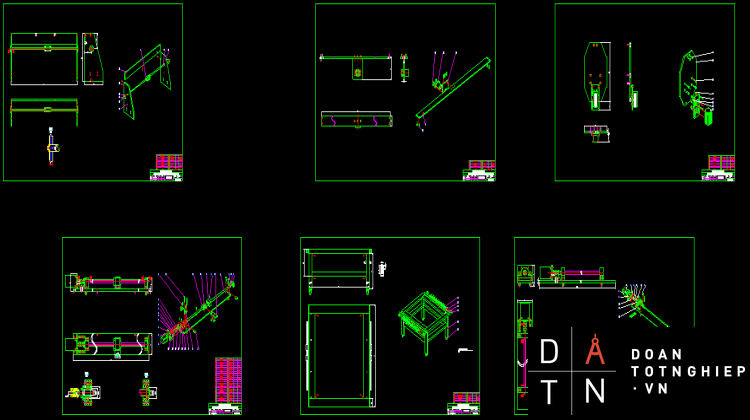
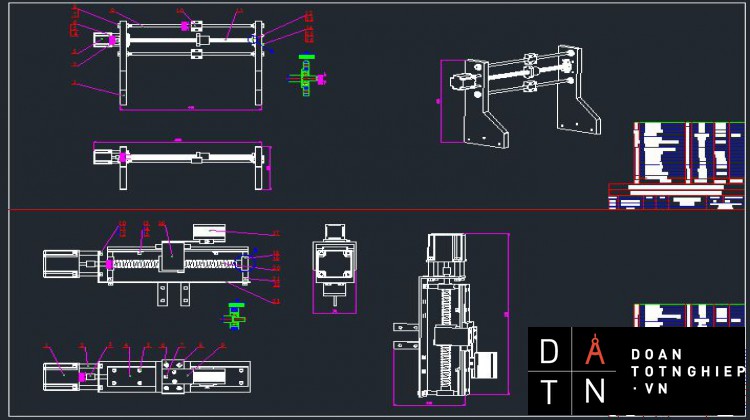
- Bản vẽ lắp kết cấu máy – A0
- Bản vẽ tách các chi tiết gia công của máy A4, A3
- Bản vẽ sơ đồ nguyên công của quy trình công nghệ gia công 1 chi tiết điển hình
- PHẦN THUYẾT MINH
- Tổng quan
- Yêu cầu xã hội về máy khắc laser.
- Giới thiệu chung về sản phẩm khắc laser hiện nay
- Yêu cầu của máy
- Thiết kế máy
- Phân tích, lựa chọn nguyên lý làm việc của máy khắc laser.
- Tính toán động học của máy.
- Tính toán động lực học máy.
- Kết luận
- Nhận xét đánh giá máy
- Hướng dẫn sử dụng, bảo quản máy.
MỤC LỤC
LỜI NÓI ĐẦU.. 1
LỜI CẢM ƠN.. 2
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN.. 3
NHẬN XÉT CỦA HỘI ĐỒNG CHẤM ĐỒ ÁN.. 4
CHƯƠNG I: TỔNG QUAN VỀ MÁY CẮT KHẮC LASER VÀ HỆ THỐNG ĐIỀU KHIỂN.. 5
1.1 ĐẶT VẤN ĐỀ.5
1.2 GIỚI THIỆU VỀ MÁY KHẮC LASER HIỆN NAY.6
1.2.1 Giới thiệu chung. 6
1.3 KẾT LUẬN CHƯƠNG I7
1.4 Một số hình ảnh về máy khắc laser.8
CHƯƠNG II PHÂN TÍCH LỰA CHỌN CÁC PHƯƠNG ÁN XÂY DỰNG MÔ HÌNH MÁY LASER.10
2.1 Nguyên lý làm việc của máy laser.10
2.2 Phân tích lựa chọn động cơ dẫn động cho các trục.11
2.2.1 Kết luận:14
2.3 Tính toán và chọn thông số động cơ bước phù hợp với máy.14
2.4 Lựa chọn nguyên lí làm việc của bàn máy khắc laser16
2.4.1 Phương án phôi cố định.16
2.4.2 Phương án phôi di chuyển trên trục X, đầu laser di chuyển theo trục Y 17
2.5 Lựa chọn cơ cấu truyền động. 18
KẾT LUẬN:21
2.6 Phân tích lựa chọn cơ cấu nối trục.22
2.7 Lựa chọn cơ cấu dẫn hướng.23
2.8 Động học và lực tác dụng.25
2.9 Đầu khắc laser.34
CHƯƠNG III: KHÁI NIỆM CƠ BẢN VỀ MÁY CNC.36
3.1. MÁY CNC- CÁC KHÁI NIỆM CƠ BẢN.. 36
3.1.1. Khái niệm máy CNC.. 36
3.1.2. Trục máy CNC.. 36
3.1.3. Nguyên tắc xác định hệ trục tọa độ trên máy CNC.. 36
3.2. Hệ thống điều khiển máy CNC laser37
3.2.1. Phần cứng của hệ thống điều khiển máy CNC.. 38
3.2.2.Phần mềm.39
3.3. Chương trình gia công NC.. 40
3.3.1 Mã lệnh G cơ bản. 42
3.3.2 Mã lệnh M cơ bản. 42
3.4. Lợi ích của máy CNC.. 42
3.4.1. Tự động hóa sản xuất42
3.4.2. Độ chính xác và lặp lại cao của sản phẩm.. 43
3.4.3. Tính linh hoạt43
3.5 Phạm vi sử dụng máy. 43
CHƯƠNG IV : HỆ THỐNG ĐIỀU KHIỂN VÀ PHẦN MỀM... 44
4.1.Tụ điện và hệ thống điều khiển.44
4.2 SƠ ĐỒ ĐIỆN.. 46
4.3 Driver động cơ (TB6560)48
4.4 Cấu trúc module điều khiển động cơ bước của TB6560. 49
4.4.1 Các chế độ điều chỉnh trên TB6560.49
4.4.2 Sơ đồ khối.50
4.4.2.1 Chức năng của từng khối.51
4.4.2.2 Sơ đồ ghép nối với mạch điều khiển.51
4.5 Khái niệm và nguyên lí hoạt động của relay.52
4.5.1 Cách sử dụng relay.53
4.6.Chương trình điều khiển và thực hành gia công logo cao thắng.53
4.6.1 Giới thiệu về arduino.53
4.6.2 phần mềm Arduino.54
4.6.3 Phần mềm Inkscape dùng chuyển đổi nét vẽ sang G-code.55
4.6.4 Các bước chuyển từ nét vẽ sang G-code trong phần mềm Inkscape. 56
CHƯƠNG V: KẾT LUẬN.. 74
5.1. Đánh giá kết quả đạt được.74
5.2. Những hạn chế và hướng khắc phục.74
5.2.1. Về thiết kế cơ khí.74
5.2.2. Về bộ điều khiển động cơ. 75
5.3. Hướng phát triển của đề tài.75
5.4 Hướng dẫn sử dụng và bảo quản.75
5.4.1Hướng dẫn sử dụng.75
5.4.2 Bảo quản máy.76
TÀI LIỆU THAM KHẢO.. 77
Phần 1. PHÂN TÍCH CHI TIẾT GIA CÔNG (CTGC).79
1.1. Phân tích công dụng và điều kiện làm việc của CTGC.. 79
1.2. Phân tích vật liệu chế tạo CTGC.79
1.3. Phân tích kết cấu, hình dạng CTGC.79
1.4. Độ chính xác của kích thước:79
1.4.1. Đối với các kích thước có chỉ dẫn dung sai.79
1.4.2 Những kích thước không chỉ dẫn dung sai.82
1.4.3 Độ chính xác về hình dáng hình học:82
1.4.4 Độ chính xác về vị trí tương quan:82
1.4.5 Chất lượng bề mặt (độ nhám):82
QUY TRÌNH CÔNG NGHỆ CHI TIẾT GỐI ĐỠ.. 83
PHẦN 2:CHỌN PHÔI VÀ XÁC ĐỊNH PHƯƠNG PHÁP CHẾ TẠO PHÔI83
2.1. Chọn phôi:83
2.1.1.Phôi đúc:83
2.1.2.Phôi cán:84
2.1.3.Phôi kéo:84
2.1.4.Phôi rèn:85
2.1.5.Phôi ép:85
2.1.6.Phôi dập nóng. 85
2.1.7.Phôi dập nguội86
2.2.Phương pháp chế tạo phôi:86
PHẦN 3: LẬP QUY TRÌNH CÔNG NGHỆ.. 88
3.1. Mục đích. 88
3.2. Nội dung. 88
PHẦN 4 BIỆN LUẬN QUY TRÌNH CÔNG NGHỆ.89
4.1 .NGUYÊN CÔNG I89
4.2.NGUYÊN CÔNG II90
4.3.NGUYÊN CÔNG III94
4.4.NGUYÊN CÔNG IV.. 97
4.5. NGUYÊN CÔNG V.. 101
4.6.NGUYÊN CÔNG VI104
4.7. NGUYÊN CÔNG VII108
4.8.NGUYÊN CÔNG VIII121
4.9.NGUYÊN CÔNG IX.. 126
4.10.NGUYÊN CÔNG X.. 128
4.11.NGUYÊN CÔNG XI131
4.12.NGUYÊN CÔNG XII134
4.13. NGUYÊN CÔNG XII139
4.14. NGUYÊN CÔNG XI:142
LỜI NÓI ĐẦU
Ngày nay nghành công nghiệp trang trí trên, điêu khắc trên các vật liệu khác nhau được hình thành và phát triển mạnh mẽ và vì thế cũng đòi hỏi những công cụ máy móc gia công chính xác và gia tăng năng xuất. Nắm được tầm quan trọng đó, nhóm em đã làm đề tài thiết kế máy cắt khắc laser 2w bằng phần mềm ARDUINO nhằm điều khiển máy giúp vẽ, khắc logo, hình trở nên đơn giản.
Những kiến thức và năng lực đạt được trong quá trình học tập tại trường sẽ được đánh giá qua đợt bảo vệ đồ án tốt nghiệp. Chúng em đã cố gắng tận dụng tất cả những kiến thức đã học ở trường cùng với sự tìm tòi nghiên cứu, để có thể hoàn thành tốt đồ án tốt nghiệp này. Kết quả là những sản phẩm đạt được trong ngày hôm nay tuy không lớn lao nhưng nó là thành quả của 3 năm học tại trường là thành công đầu tiên của chúng em trước khi ra trường.
Tuy nhóm chúng em đã cố giắng hết sức, nhưng chắc sẽ không tránh khỏi những sai sót, mong quý thầy cô thông cảm. Chúng em mong nhận được những ý kiến đóng góp tận tình của quý thầy cô và các bạn.
PHẦN 1
CHƯƠNG I: TỔNG QUAN VỀ MÁY CẮT KHẮC LASER VÀ HỆ THỐNG ĐIỀU KHIỂN
1.1 ĐẶT VẤN ĐỀ.
vYêu cầu xã hội.
- Nghành công nghiệp trang trí, điêu khắc tạo ra các hoa văn trên những vật liệu khác nhau như da, vải, gỗ...đã được hình thành từ rất lâu và phát triển bởi những bàn tay cần cù điêu luyện của các nghệ nhân. Nhưng với sự phát triển của xã hội, những tiến bộ trong công nghệ cũng như sự đa dạng ngày càng tăng của vật liệu, tay chạm khắc không thể đạt được nhu cầu phát triển của xã hội.
-Với một loạt các vật liệu mới đang nổi lên, không thể đáp ứng các yêu cầu của tay chạm khắc nhiều loại vật liệu mới và các đặc tính khác nhau của vật liệu. Khi nhu cầu khắc trang trí phức tạp và tính chính xác của các đối tượng khi đó sử dụng phương pháp thủ công hay các máy gia công truyền thống không thể gia công đạt yêu cầu và gây ảnh hưởng đến chất lượng của sản phẩm.
-Từ đó các kĩ sư đã thiết kế và chế tạo máy cắt khắc laser có độ chính xác cao hơn, khắc các vật liệu khác nhau, giảm thời gian tạo ra sản phẩm và yêu cầu sản xuất khắc ra mô hình phức tạp đáp ứng được yêu cầu sản xuất hàng loạt.
- Tại Việt Nam các máy khắc laser công nghiệp cũng đã có mặt trên thị trường trong nhiều năm và phần lớn được cung cấp bởi các công ty hoạt động thương mại. Máy cắt khắc laser tạo bước phát triển lớn trong nghành công nghiệp trang trí.
- Đa phần các máy laser tại Việt Nam được các công ty sản xuất hàng loạt với công nghệ tiên tiến nhưng bù lại lại có chi phí cao, không linh hoạt trong cuộc sống và được phục vụ vào mục đích tạo ra các sản phẩm hàng loạt.
vKết luận.
- Trong xu thế đó nhằm mục đích chế tạo một máy công cụ chính xác có thể linh hoạt trong cuộc sống thực hiện được tại gia đình và chi phí thấp nhằm phục vụ trong việc khắc chữ trên gỗ, nhựa, giấy, da, vải, phục vụ cho mỹ nghệ, quà lưu niệm, tranh ảnh nên nhóm đã thực hiện đề tài máy cắt khắc laser 2w
1.2 GIỚI THIỆU VỀ MÁY KHẮC LASER HIỆN NAY.
1.2.1 Giới thiệu chung
- Hiện nay nhìn chung ngoài thị trường có nhiều loại máy khắc laser nhưng phô biến có những loại máy được sử dụng rộng rãi như :
• Máy Laser Engraving
+Đây là loại thông dụng nhất của công cụ khắc, và đã bùng nổ phổ biến trong vài năm nay. Máy chạm khắc những hình ảnh 3D phức tạp và rất chính xác. Ngoài ra với chức năng máy tính điều khiển và do đó giảm đáng kể khả năng sai sót
+Máy khắc Laser có lợi thế là không phải thay thế các bộ phận gần như thường xuyên với một khắc bằng tay vì chạm khắc bằng tay sử dụng nhiều công cụ để thực hiện
Hình 1.1: Máy Laser Engraving.[01]
- Máy khắc laser logo CNC
+Đây là loại máy rất phổ biến hiện nay và được sử dụng nhiều ngoài thị trường để đáp ứng nhu cầu khắc logo.
+Máy khắc laser logo CNC được điều khiển bởi chương trình điều khiển tự động CNC và hơn thế nữa máy Laser khắc logo CNC có thể lấy một bản vẽ từ CAD và sau đó chỉ cần cấm vào điều khiển CNC lập trình và được gia công.
Hình 1.2:Máy khắc logo CNC. [ 02]
1.3 KẾT LUẬN CHƯƠNG I
- Máy laser là loại máy gia công cơ khí rất phổ biến hiện nay, sự ra đời và phát triển của nó đã thúc đẩy sự phát triển của ngành cơ khí chế tạo đóng góp to lớn vào việc tạo ra của cải cho xã hội. Sự ra đời của máy laser làm cho các sản phẩm cơ khí chế tạo có chất lượng tốt hơn, độ chính xác cao hơn và đặc biệt có thể sản xuất hàng loạt. Máy laser có nhiều chủng loại khác nhau tùy thuộc vào công suất và cơ cấu khác nhau.Tuy nhiên xét tổng thể về nguyên lý thì các máy laser đều có cấu trúc và hệ điều khiển tương tự nhau. Cấu trúc của tất cả các loại máy laser đều bao gồm: Phần xử lý trung tâm (Giao diện người máy và thực hiện nội suy), phần điều khiển stepper motor, động cơ Stepper motor. Tuy nhiên trong thực tế nghiên cứu của sinh viên trong nước nói chung và sinh viên cao đẳng CAO THẮNG nói riêng, thì việc nghiên cứu chế tạo một máy laser với đầy đủ chức năng và bộ phận của một máy laser tiêu chuẩn là rất khó. Vì giá thành động cơ steper motor và hệ thống dẫn động vít me bi rất đắt và điều kiện nhà xưởng còn hạn chế nên việc chế tạo một máy laser đối với sinh viên là rất khó.
- Trong đồ án này chúng em tập trung chủ yếu vào việc nghiên cứu các phần tử trong hệ thống điều khiển của máy laser tiêu chuẩn. Từ đó bắt tay vào chế tạo một mô hình máy khắc laser cỡ vừa. Mục tiêc của em trong đồ án này là chế tạo được mô hình máy khắc laser hoạt động tốt và có thể gia công được gỗ, nhựa, da. Máy có thể nhận file G-code và có thể lập trình bằng tay trên phần mềm điều khiển. Các sản phẩm có thể khắc ra là các bức tranh 2d, logo, khắc tên trên gỗ và trên nhựa và da.
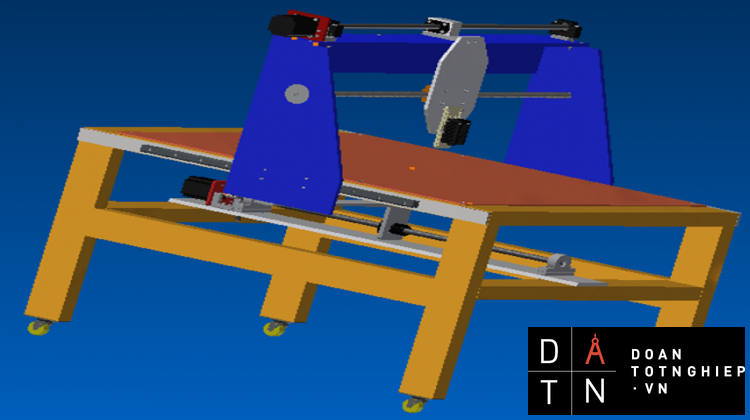
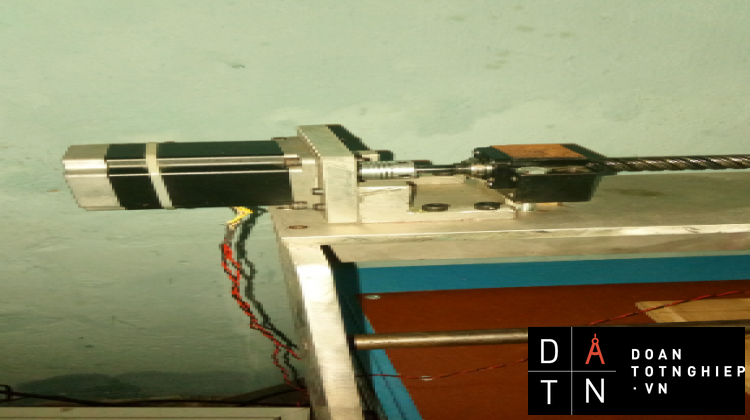
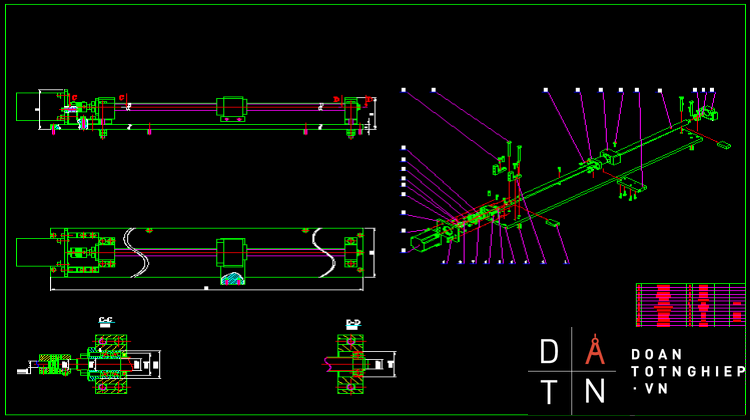
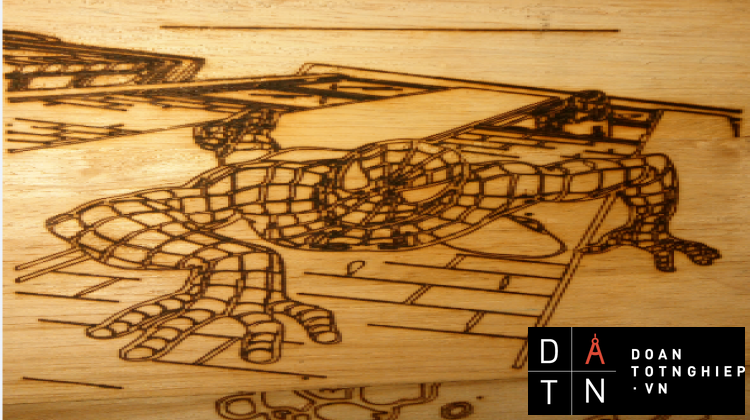
1.4 Một số hình ảnh về máy khắc laser.
Hình 1.3: Một số hình ảnh về máy laser của nhóm.
1.5 Yêu cầu của máy laser
•Máy phải hoạt động ổn định, chạy êm, không xảy ra lỗi trong qua trình gia công.
•Máy lắp ráp phải có tính công nghệ cao nghĩa là dễ tháo lắp, thay thế, bảo dưỡng.
•Máy sử dụng những chi tiết tiêu chuẩn hóa như bulông, vòng bi, vítme bi nên dễ dàng thay thế và giá thành của máy cũng thấp đi.
•Sản phẩm được làm ra với thiết kế đẹp mắt, chi phí sản xuất và bảo trì thấp so với sản phẩm cùng loại của nước ngoài, do đó phù hợp với túi tiền của người dùng. Sản phẩm có các phần mềm hỗ trợ trực quan, dễ hiểu nên mọi người đều có thể sử dụng một cách dễ dàng sau vài giờ tìm hiểu, do đó có khả năng đưa ra sử dụng rộng rãi, phổ biến.
•Phần mềm giao tiếp giữa máy laser với máy tính là ARDUINO, nó có thể hoạt động trên mọi hệ điều hành của Windows, thẩm chí cả laptop thay vì máy tính để bàn như các phần mềm khác.
- Tính an toàn của máy: nguồn laser có hại cho mắt của chúng ta nên khi sử dụng máy cần đeo kính chuyên dùng bảo vệ cho cặp mắt của chúng ta.
- Tính thuận tiện của máy: máy khá dễ điều khiển và hiểu chỉnh.
- Tính thẩm mỹ: máy có thiết kế khá dễ nhìn, màu chủ đạo là xanh da trời.
- Tính môi trường: Máy không làm ảnh hưởng đến môi trường xung quanh, không ồn ào, và đặt biệt không gây ô nhiễm môi trường.
- Kích thước bàn máy: dài: 840mm, rộng: 960mm.
- Khoảng làm việc: dài: 520mm, rộng: 720mm.
- Vật liệu cắt: gỗ, da, nhựa, giấy.
- Nguồn điện làm việc: máy sử dụng nguồn điện 222V, 50-60 Hz.
- Công suất laser: laser bán dẫn 2w.
CHƯƠNG II PHÂN TÍCH LỰA CHỌN CÁC PHƯƠNG ÁN XÂY DỰNG MÔ HÌNH MÁY LASER.
2.1 Nguyên lý làm việc của máy laser.
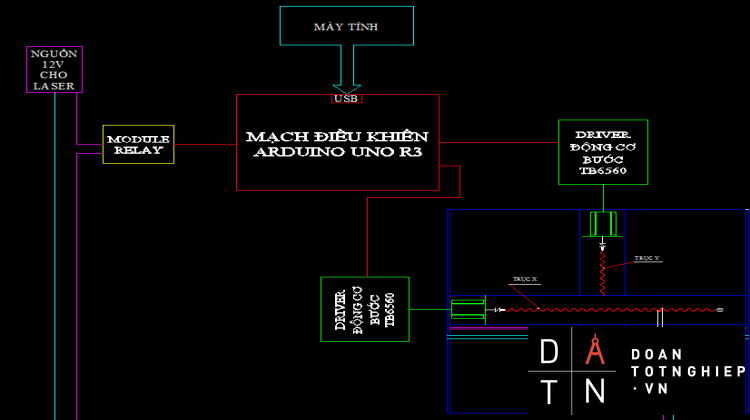
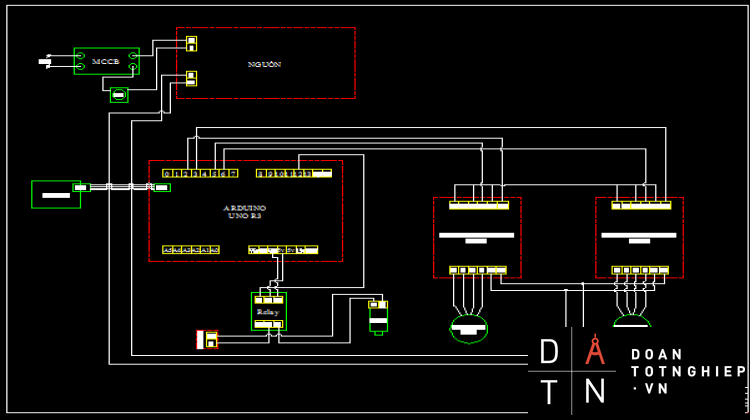
• Máy laser hoạt động theo nguyên lý chi tiết đứng im và đầu laser di chuyển, laser được đóng, ngắt tự động nhờ relay. Dự liệu được đưa vào máy tính có thể là tự thiết kế hoặc lấy trên mạng, và được đưa vào phần mềm inkscape để xử lý và xuất G-code, tại đây G-code được tạo thành đem đi kiểm tra bằng phần mềm CIMCO Edit V5 .G-code chạy theo như ý muốn thì đem đi gia công và không đúng thì loại bỏ và thiết kế lại. G-code đạt yêu cầu đem đi gia công với phần mềm điều khiển Grbl Controller tương thích với ARDUINO. Tại đây mạch ARDUINO sẽ xử lý tín hiệu từ Grbl Controller xuất ra và xuất xung tín hiệu cho các cơ cấu chấp hành (2 driver TB6560, 1 relay).
• Driver TB6560 sẽ điều khiển động cơ bước quay theo tín hiệu xung nhận được từ ARDUINO, động cơ bước xoay làm vitsme di chuyển và kéo theo laser, 2 động cơ bước tạo thành hệ mặt phẳng XOY.
• RELAY sẽ đóng ngắt laser một cách tự động dựa vào tín hiệu từ ARDUINO xuất ra
(M03 bật laser, M05 tắt laser).
Hình 2.1: Sơ đồ nguyên lý máy laser.
2.2 Phân tích lựa chọn động cơ dẫn động cho các trục.
vĐộng cơ một chiều (DC motor)
Hình 2.2: Động cơ DC một chiều.[03]
Ưu điểm:
+ Giá thành rẻ.
+ Tốc độ nhanh, động cơ xoay vòng liên tục.
+ Dễ điều khiển , driver tương đối đơn giản.
Nhược điểm:
+ Đáp ứng chậm, trong khi mạch điều khiển vị trí và vận tốc lại phức tạp, quay độ không chính xác.
+ Khó điều chỉnh tốc độ của động cơ (phải cần có bộ phận điều khiển tốc độ).
+ Momen xoắn thấp.
vĐộng cơ AC SERVO
Ưu điểm:
+
|
Hình 2.3: Động cơ AC SERVO.[04] |
Momen xoắn lớn, tốc độ đáp ứng nhanh, độ chính xác cao.
+ Hiệu suất hoạt động cao.
+ Không trượt bước khi tải đặt vào động cơ tăng.
+ Hoạt động với tốc độ cao tốt.
Nhược điểm:
+ Driver điều khiển khá phức tạp, khó điều khiển và giá thành cao.
+ Giá thành cao so với các động cơ khác.
+ Khi dừng động cơ sẽ gây rung.
vĐộng cơ bước ( stepping motor)
Hình 2.4: Động cơ bước size 42.[05] Hình 2.5: Động cơ bước size 56.[05]
Ưu điểm:
Không chổi than:Không xảy ra hiện tượng đánh lửa chổi than làm tổn hao năng lượng, tại một số môi trường đặc biệt (hầm lò...) có thể gây nguy hiểm.
Tạo được mômen giữ: Một vấn đề khó trong điều khiển là điều khiển động cơ ở tốc độ thấp mà vẫn giữ được mômen tải lớn. Động cơ bước là thiết bị làm việc tốt trong vùng tốc độ nhỏ. Nó có thể giữ được mômen thậm chí cả vị trí nhờ vào tác dụng hãm lại của từ trường rotor.
Điều khiển vị trí theo vòng hở:Một lợi thế rất lớn của động cơ bước là ta có thể điều chỉnh vị trí quay của roto theo ý muốn mà không cần đến phản hồi vị trí như các động cơ khác, không phải dùng đến encoder hay máy phát tốc (khác với servo).
Độc lập với tải: Với các loại động cơ khác, đặc tính của tải rất ảnh hưởng tới chất lượng điều khiển. Với động cơ bước, tốc độ quay của rotor không phụ thuộc vào tải (khi vẫn nằm trong vùng momen có thể kéo được). Khi momen tải quá lớn gây ra hiện tượng trượt, do đó không thể kiểm soát được góc quay.
Nhược điểm:
+ Phạm vi ứng dụng là ở lĩnh vực công suất nhỏ và trung bình, hiệu suất thấp hơn các loại động cơ khác.
+ Gây rung động nhỏ.
+ Gây ra hiện tượng trượt bước nếu hoat động với tốc độ cao.
+ Không có phản hồi nên có thể xảy ra sai số.
- Phân loại: Động cơ bước cơ bản được chia theo cực và nam châm:
1: Động cơ nam châm vĩnh cửu
2: Động cơ lai
3: Động cơ đơn cực
4: Động cơ lưỡng cực
Các loại trên có thể giao nhau tùy mục đích sử dụng.
So sánh giữa các loại:
+So sánh động cơ đơn cực và lưỡng cực:
-Động cơ loại lưỡng cực sẽ có moment sinh ra nhiều hơn 30% so với loại đơn cực có cùng kích thước.
- Động cơ đơn cực có chiều dòng điện qua mỗi cuộn dây không đổi , ngươc lại động cơ lưỡng cực có chiều dòng điện qua cuộn dây thay đổi
- Tuy nhiên động cơ loại lưỡng cực lại có mạch điều khiển phức tạp hơn so với loại đơn cực
+đặc điểm động cơ lai
Step size :
Lai : (0.9 - > 3.6 ) độ
Và để có độ phân giải nhỏ hơn, chúng ta có thể sử dụng thêm hộp giảm tốc.
Moment :
Moment là một trong những vấn đề quan trọng khi lựa chọn động cơ bước.
- Moment giữ: là moment cần thiết để xoay trục động cơ khi cuộn dây được cấp điện.
- Moment kéo: là moment sinh ra khi động cơ xoay ở vận tốc ổn định, moment này chống lại khả năng tăng tốc của động cơ mà không bị trượt bước.
- Moment kéo ra: moment này có thể làm cho động cơ di chuyển khi đang động cơ đang hoạt động.
- Moment chốt: là moment đòi hỏi để xoay động cơ khi cuộn dây động cơ không cấp điện.
- Các động cơ có các đặc điểm khác nhau , từ những đặc điểm đó ta sử dụng tùy vào mục đích khác nhau
- Do kết cấu máy cần:
- Momen xoắn lớn dù hoạt động ở tốc độ thấp , tạo được momen giữ
- Hoạt động được tải thấp mà vẫn giữ được momen
- Có thể điều chỉnh được vị trí quay của roto
- Truyền động chính xác và linh hoạt trong điều khiển
- An toàn và dễ sử dụng
- Do điều kiện mua những linh kiện, giá thành từng loại đông cơ, kết cấu, cũng như làm mô hình để nghiên cứu về laser nên:
2.2.1 Kết luận:
àTa chọn động cơ bước lưỡng cực làm động cơ dẫn động cho các trục toạ độ.
2.3 Tính toán và chọn thông số động cơ bước phù hợp với máy.
•Chọn động cơ cho vít me.
•Đặt các đại lượng:
- Moment động cơ: M (Nm)
- Bước vitme : u (m)
- Lực đẩy hệ chuyển động: F (N)
• Do có ma sát nên công sinh ra để quay vítme một vòng bằng công đẩy hệ dời 1 bước, hiệu suất ổ lăn 96%.
M= = = 0.53 (Nm). [06]
•Mà moment của động cơ phải lớn hơn moment tải 30% (Để động cơ không bị quá tải khi khởi động)
Ä= 0.53 + 0.53.0.3= 0.7 (Nm).
•Do quá trình mua động cơ bước không hề đơn giản, phải có mạch và driver kiểm tra mới được, phải qua những bãi rác điện tử tìm kiếm những động cơ củ của những máy scan hay photocopy
•Nhóm đã tìm được một cặp động cơ rất vừa ý mang tên VEXTA PK268-02A
Sau đây là thông số của động cơ bước:
Hình 2.6: Khối lượng vítme cần mang đi.
|
Hình 2.7a: Động cơ bước VEXTA PK268-02A.[07] |
|
Hình 2.7b: Sơ đồ mạch động cơ lưỡng cực 2 pha. [08] |
vThông số của động cơ.
+ Đường kính trục Ø6.35mm.
+ Kích thước mặt bích: 57x57mm
+ Chiều dài thân 76mm
+ Dòng chịu tải 2A
+ Góc bước 1.8°/step
+ Moment xoắn trên trục: 1.75Nm
+ Điện áp định mức: 6VDC
Dùng cho trục X.Y
2.4 Lựa chọn nguyên lí làm việc của bàn máy khắc laser
Đầu tiên với việc biện luận và lựa chọn phương án đối với phôi.
2.4.1 Phương án phôi cố định.
Hình 2.8: Phương án phôi cố định.
●Trục X chuyển động trên bệ máy, trục Y chuyển động trên trục X.
- Đặc điểm:
-Để trục X có thể trượt được trên bệ đỡ vừa nâng được trục Y, thì nó thường phải có kết cấu vững chắc và có các thanh rằng ngang để toàn bộ phần trượt X không bị vênh, xộc xệch khi di chuyển, đồng thời hai bệ đỡ thanh ray hai bên phải đủ độ cứng vững, để khi gia công chi tiết không bị rung, rơ, đảm bảo trượt ổn định và không sai số.
-Trục Y trượt trên trục X có gắn các thanh trượt, cơ cấu truyền động, động cơ…tất cả các bộ phận này chuyển động trên trục X.
Ưu điểm: có tính đa năng, không gian làm việc lớn, có thể thiết kế cải tiến thêm đầu phay, cắt plasma đặt cố định trên bệ máy để có thể tiện phay kết hợp, do đó có thể nâng cấp lên thành một trung tâm CNC nhiều trục, nhiều tính năng.
Nhược điểm: chi phí chế tạo máy cao do đòi hỏi độ cứng vững của các trục di động. thiết kế lắp ráp khó khăn. Bởi nếu lắp 2 thanh trượt trên trục X lệch, không song song thì hệ thống chạy không êm.
2.4.2 Phương án phôi di chuyển trên trục X, đầu laser di chuyển theo trục Y
Hình 2.9: Phương án phôi di chuyển. [09]
Đặc điểm:
Phần cố định bao gồm khung máy hay bệ đỡ, động cơ và cơ cấu truyền động của trục X và Y gắn cố định với khung máy.
●Trục Y đều trượt trên các thanh trượt gắn cố định ở khung,
●Trục X mang theo bàn máy và khi trục X di chuyển độc lập một mình không mang theo trục Y.
Ưu điểm :Là cấu tạo máy đơn giản hơn, gia công lắp ghép các chi tiết của máy dễ dàng hơn, độ cứng vữngthấp hơn so với loại máy Router trên.
Nhược điểm: không gian làm việc bị giới hạn, nhỏ hơn so với loại Router cùng kích thước, không lắp cố định được trục A trên đế máy mà phải lắp trên bàn gá di động của trục X và do đó bàn gá phải đủ độ dày, kéo theo các chi tiết khác như thanh trượt, con trượt… phải đủ lớn để đảm bảo độ cứng vững khi gia công chi tiết có chuyển động quay quanh trục và sinh ra tải trọng va đập.
KẾT LUẬN:
uVới mục đích thí nghiệm, giảng dạy nên nhóm chọn phương án phôi cố định, tức là bàn máy sẽ cố định, trục X di chuyển mang theo trục Y và đầu laser, trục Y di chuyển mang theo đầu laser và trượt trên trục X.
2.5 Lựa chọn cơ cấu truyền động
A. vít me đai ốc thường:
Hình 2.10:Vít me đai ốc thường. [10]
Đặc điểm
-Vít me được gắn đồng trục với động cơ thông qua khớp nối mền, khi động cơ quay, vít me quay.
-Động cơ và vít me gắn cố định làm cho đai ốc di chuyển dọc trục vít me. Đai ốc thì được gắn chặt vào bộ phận cần chuyển động, (trục X Y ) tốc độ di chuyển phụ thuộc vào tốc độ động cơ và bước ren của trục vít, một vòng quay của động cơ sẽ làm cho đai ốc dịch chuyển một đoạn bằng bước ren của truc vít, vì vậy tốc độ di chuyển của bộ phận trượt ở phương án này là chậm và có độ chính xác khi chuyển động không cao vì có độ rơ của đai ốc. Dùng động cơ có bước góc càng nhỏ thì độ chính xác di chuyển càng cao.
- Ngoài ra còn có các ưu điểm khác:
- Tạo ra lực đẩy lớn khi gia công chi tiết.
- Truyền động chính xác
-phương án này dùng trong các máy công nghiệp gia công các loại vật liệu cứng có kích thước lớn…
B: Vít me đai ốc bi:
Hình 2.11: Một số hình ảnh của vítme bi.[11]
- Đây là dạng vít me đai ốc thay vì ma sát trượt thông thường thì đây là tiếp xúc giữa vít me và đai ốc thông qua các viên bi được chuyển thành ma sát lăn. Điều này đem đến một ưu điểm lớn: chỉ cần một lực quay rất nhỏ đã có thể làm cho đai ốc chuyển động.
-Độ chính xác di chuyển cao do không có độ rơ giữa vít me và đai ốc.
uCác dạng vít me bi:
-Tùy theo dạng chuyển dộng của vít me và đai ốc có thể chia ra các loại:
+ Vít vừa quay vừa tịnh tiến, đai ốc cố định với giá
+ Đai ốc quay, vít tịnh tiến
+ Vít quay, đai ốc tịnh tiến
+ Đai ốc vừa quay vừa tịnh tiến, vít cố định
- Cấu tạo và hoạt động.
- Hoạt động: Tiếp xúc giữa vít me bi và đai ốc có 1 đường rãnh (rãnh me ) được lắp đầy bởi những viên bi thép. Khi trục vít xoay, những viên bi lăn tròn trong mối ren của trục vít và đai ốc. Điều này nhằm giảm ma sát của chúng. Bởi vì các viên bi cuối cùng sẻ rơi ra ngoài, nên đai óc có 1 đường ống dẫn về (đường hồi) để hứng những viên bi khỏi rãnh của trục vít và đưa chúng trở lại phần đầu của đường bi ở phía cuối của đai ốc.
-Lực đẩy của đai ốc nhẹ nhàng nhờ chuyển động lăn của những viên bi cuộn tròn, hơn là trượt. Cấu tạo như sau:
Hình 2.12: Cấu tạo hoạt động của vítme bi. [12]
●Ưu, Nhược điểm.
Ưu điểm:
- Cấu tạo đơn giản, thắng lực lớn, thực hiện được dịch chuyển chậm
- Kích thước nhỏ, chịu được lực lớn
- Thực hiện được các dịch chuyển chính xác cao
- Giảm ma sát và hoạt động êm.
Nhược điểm:
- Giá thành đắt, chưa chủ động được nguồn cung.
•Lựa chọn mua vítme bi, khi mua vítme bi trục X bước phải lớn hơn trục Y, nếu mua được vítme có bước nhỏ như 5mm thì tốt, nếu không chọn bước lớn hơn cũng được, lí do là driver TB6560 điều khiển động cơ có chức năng điều khiển vi bước (micro stepping),
•Thứ nối MS1, MS2, MS3, ta sẽ được
vi bước 1/16. Động cơ bước có góc bước
1.8°/step, nghĩa là động cơ bước có 200
bước thì ta sẽ chia nhỏ mỗi bước ra thành
|
Hình 2.13: Bảng chia vi bước. |
16 bước.
ÄTổng bước của động cơ lúc này là 200.16=3200, không còn là 200 bước nữa
•Như vậy đối với vítme bước càng lớn thì chọn vi bước càng lớn, vì mua mạch driver theo vítme dễ hơn là mua driver vítme theo driver.
•Khi số bước càng lớn thì khi gia công sẽ càng mịn, có điều động cơ sẽ nóng hơn bình thường.
uKẾT LUẬN:
•Chọn phương án gá phôi cố định dùng vít me đai ốc bi làm cơ cấu truyền chuyển động cho các trục. Nhóm quyết định chọn phương án này vì thiết kế cơ khí đơn giản, hệ thống cứng vững hơn, đảm bảo được các yêu cầu một máy CNC laser ở mức độ mô hình ứng dụng học tập.
Thông số vít me:
+Trục X: L=830mm
+Đường kính ngoài: Ø15mm
+Ren 4 đầu mối
+Bước ren: 32mm
+Trục Y: L=770mm
+Đường kính ngoài: Ø15mm
+Ren 4 đầu mối
+Bước ren: 20mm
2.6 Phân tích lựa chọn cơ cấu nối trục.
•Thông thường giữa động cơ và trục vítme được nối với nhau theo 2 cách:
+ Dùng khớp nối đàn hồi.
+ Dùng bánh đai răng.
- Khớp nối đàn hồi là loại khớp nối giúp động cơ và vítme gần như là một đường thẳng.
Hình 2.14: Khớp nối đàn hồi. [13]
Ưu điểm:
- Đơn giản, nhỏ gọn momen xoắn cao.
- Chống dầu, chống ăn mòn.
- Có thể hấp thụ rung động,bồi thường xuyên tâm, lệch chi tiết góc cạnh.
- Độ cứng, độ chính xác cao.
- Quán tính thấp, đàn hồi tốt.
- Giá thành thấp.
Nhược điểm: Đòi hỏi độ đồng trục giữa đông cơ bước và trục vítme cao, vì thế đòi hỏi tay nghề cơ khí của người lắp cao.
●Bánh răng đai là loại phương pháp nối giúp thay đổi tỉ số truyền.
|
Hình 2.15: Bánh răng nối trục để thay đổi tỉ số truyền. [14] |
Ưu điểm: không cần độ đồng trục giữa đông cơ và trục, có thể thay đổi được tỉ số truyền
Nhược điểm: chi phí cao, giản đai cần phải có thêm bộ căn chỉnh, bảo dưỡng sữa chữa tốn kém
2.7 Lựa chọn cơ cấu dẫn hướng.
●Trục X.
-Thanh trợt trục X là trục chịu lực toàn bộ trục Y và đầu laser và thành bên của máy.
-Các loại thanh trượt có thể dùng là:
Hình 2.16: Ray trượt tròn có đế. [15] Hình 2.17: Ray trượt tròn.[16]
Hình 2.28:Ray trượt vuông.[17]
- Ray trượt tròn có đế (Hình 2.16).
Ưu điểm: chạy nhẹ, dễ lắp rắp.
Nhược điểm: chạy một thời gian sẽ để lại 2 rãnh do viên bi để lại, và như vậy tuổi thọ không được cao.
● Ray trượt tròn (Hình 2.17).
Ưu điểm: giá thành rẻ, chạy êm.
Nhược điểm: chịu lực kém, chạy một thời gian để lại 2 đường do bi trượt gây ra, và có thể xoay đi để xài tiếp.
- Ray trượt vuông (Hình 2.18).
Ưu điểm: chịu lực cao, ít bị mòn, tuổi thọ cao, dễ lắp rắp.
Nhược điểm: Giá thành cao.
KẾT LUẬN:Vì dễ lắp ráp và có chỗ mua rẽ, nên nhóm em quyết định chọn thanh dẫn hướng cho trục X là một cặp thanh trượt vuông dài 720mm.
●Trục Y.
Các loại thanh trượt dùng cho trục Y cung tương tự trục X gồm có:
- Ray trượt tròn có đế (Hình 2.16).
Ưu điểm: chạy nhẹ, dễ lắp rắp.
Nhược điểm: chạy một thời gian sẽ để lại 2 rãnh do viên bi để lại, và như vậy tuổi thọ không được cao.
- Ray trượt tròn (Hình 2.17).
Ưu điểm: giá thành rẻ, chạy êm.
Nhược điểm: chịu lực kém, chạy một thời gian để lại 2 đường do bi trượt gây ra, và có thể xoay đi để xài tiếp.
- Ray trượt vuông (Hình 2.18).
Ưu điểm:
- Độ chính xác cao cho việc dẫn hướng với độ hở nhỏ và độ cứng vững cao.
- Ma sát thấp và ít mài mòn.
- Bảo dưỡng và khả năng bôi trơn đơn giản.
Nhược điểm: Giá thành cao.
KẾT LUẬN: Trục Y cần chạy nhẹ, lắp ghép dễ dàng, và cũng chỉ chứa đầu laser rất nhẹ nên nhóm em chọn một cây thanh trượt tròn Ø16mm, dài 830mm.
2.8 Động học và lực tác dụng.
vTính bền cho lục giác
•Xác định khối lượng mà 8 con bulông phải chịu.
•Để xác định khối lượng, nhóm dùng tính năng iProperties của phần mềm inventer dể tính.
•Chọn vật liệu cho từng chi tiết rồi tính khối lượng cho từng chi tiết rồi tổng lại:
•Đây là tổng khối lượng mà bulông phải chịu.
Hình 2.19: Khối lượng mà lục giác phải chịu.
MỘT SỐ HÌNH ẢNH VỀ KHỐI LƯỢNG CỦA CÁC CHI TIẾT.
Hình 2.20: Khối lượng tấm nối.
|
Hình 2.21: Khối lượng đế bên đứng. |
Hình 2.22: Khối lượng tấm nối laser.
|
Hình 2.23: Khối lượng thanh trụ ngang. |
Hình 2.24: Khối lượng vítme trên.
Hình 2.25: Khối lượng động cơ.
Hình 2.26: Khối lượng gối đỡ BK-12.
|
Hình 2.27: Khối lượng gối đỡ BF-12.
|
Hình 2.28:Khối lượng thanh nối.
Hình 2.29:Khối lượng tấm nối vítme trục Y.
●Khối lượng bulông phải chịu bằng:
2,384.2+2,433.2+0,779+1,269+1,011+1,603+0,292+0,248+0,856+0,164=15,85 kg.
•Còn một số chi tiết co khối lượng nhỏ như bulong , vòng đệm nên khối lượng khoảng 16 (kg)ðP = m.g =16.10= 160 (N).
•Thanh trượt vuông trục Y chịu toàn bộ khôi lượng của cả trục X nên khối lượng thanh trượt vuông phải chịu là 16kg.
•Mỗi con trượt vuông có 2 lỗ ren, và lắp ghép giữa thanh bên (bao gồm cả trục X) và con trượt vuông là lắp ghép ren (M4)
vTính bền cho bulông M4.
uThân bulông bị cắt
τ == £[ τ ](3-6a) trang 29 sách Sức bền vật liệu.
Trong đó: P: Lực tác dụng lên tấm ghép.
n: Số bulông.
i: Số mặt ghép.
d: Đường kính thân bulông.
ÄThay vào ta có: τ == = = 1.59 N/ £[ τ ]=1200 N/( lục giác M4 có cấp độ bền 12.9)
Cách tính cấp độ bền:
•Lấy số đầu nhân với 100 cho ta chỉ số giới hạn bền nhỏ nhất (Mpa), số thứ 2 trong dãy chia cho 10 rồi tất cả nhân với chỉ số giới hạn bền nhỏ nhất.
12.9ð giới hạn bền nhỏ nhất là 12.100=1200Mpa,
ðgiới hạn chảy là 1200 =1080 Mpa
•1Pa=1N/ ð1Mpa = 1N/.
Hình 2.30:Chỉ số cấp độ bền theo BS 3692:2001 và BS EN IOS 898-1:1999.
Hình 2.31: Bảng số cấp độ bền của bulông theo sách chuyên ngành cơ khí trang 371.
uThân bulông bị dập
== £[ ](3-6a) trang 29 sách Sức bền vật liệu.
Trong đó: P: Lực tác dụng lên tấm ghép.
n: Số bulông.
: Bề dày mặt cắt.
d: Đường kính thân bulông.
ÄThay vào ta có== = =0.0125 N/ £[ ]=1080
N/( lục giác M4 có cấp độ bền 12.9).
Kết luận Bulong M4 đủ bền để chịu tải 160N (16kg).
vTinh toán và chọn đường kính vítme bi phù hợp.
- Đường kính vít me được xác định theo công thức:
=== 9mm
(8.10 trang 299 sách CSTKM-Nguyễn hữu lộc)
Trong đó :: đường kính ngoài vit me.
: tải cần phải kéo.
hệ số chiều cao đai ốc.
:hệ số chiều cao ren.
ÄTừ đường kính tra Catalogue phần vítme bi của hãng THK trang 290/374 để lựa chọn đường kính vítme.
Hình 2.32:Catalogue đường kính vítme bi hãng THK.
•Ở đây nên chọn đường kính vítme có đường kính từ Ø12mm trở lên, lý do là còn phải tiện đầu để lắp ổ lăn hoạc vòng bi. Mà vòng bi tiêu chuẩn đường kính nhỏ nhất là Ø10mm.
Hình 2.32: Bảng giá trị ,.
vMối liên hệ giữa bước vítme và động cơ.
• Động cơ bước gắn trực tiếp vào trục vítme không qua bộ truyền động, tỷ số truyền là 1.
• Giữa động cơ bước và vít me có mối liên hệ như sau.
•Động cơ bước thông dụng là góc quay /step, nghĩa là động cơ bước sẽ có 200 xung tín hiệu.
•Công thức để xác định động cơ quay 1 vòng vítme đi được bao nhiêu mm.
A= (Step/mm) (Tìm hiểu và thực nghiệm)
●Trong đó:
+ j là vi bước của driver động cơ bước (tại đây j được chọn là )
+ là bước của vít me.
ÄThay vào ta có:
+Đối với trục X: A= = 160 (step/mm)
•Nghĩa là để vít me đi được 1mm thì động cơ bước sử dụng 160 step trong tổng số 200 step.
+Đối với trục Y: A= = 100 (step/mm)
•Nghĩa là để động cơ quay 1 vòng thì động cơ cần 160 xung đới với trục Y và 100 xung đối với trục X để vítme tịnh tiến một đoạn bằng với bước của nó.
●Như vậy, không nhất thiết 2 vítme phải cùng bước với nhau, và trên thực tế thì trục X bước luôn cao hơn trục Y, lý do là khi khắc tranh trục X hoạt động nhiều hơn trục Y, cần bước lớn để gia công nhanh.
Kết luận: Do không chịu tải trọng lớn, lực dọc trục không đáng kể nên ta chọn sử dụng bộ truyền vít me – đai ốc với vật liệu sử dụng cho cặp ren vítme – đai ốc là thép tôi và đồng thanh.
2.9 Đầu khắc laser.
|
Hình 2.33: Đầu khắc laser.
|
•Đầu khắc laser bán dẫn phát ra tia laser màu xanh dương bước sóng 445nm, công suât thật 2000mW (2W), gắn vào máy CNC khắc gỗ, vải, da, nhựa…
•Vì là làm mô hình khắc để biết công nghệ nên nhóm chọn loại 2w cho phù hợp với kinh tế. Công suất càng lớn thì sẽ càng đắt.
CHƯƠNG III: KHÁI NIỆM CƠ BẢN VỀ MÁY CNC.
3.1. MÁY CNC- CÁC KHÁI NIỆM CƠ BẢN
3.1.1. Khái niệm máy CNC
•CNC (Computer Numerical Control) là một dạng máy NC điều khiển tự động có sự trợ giúp của máy tính, mà trong đó các bộ phận tự động được lập trình để hoạt động theo các sự kiện nối tiếp nhau với một tốc độ được xác định trước để có thể tạo ra được mẫu vật với hình dạng và kích thước yêu cầu.
3.1.2. Trục máy CNC
•Để có thể điều khiển chuyển động dụng cụ cắt dọc theo đường hình học trên bề mặt chi tiết cần có một mối quan hệ giữa dụng cụ và chi tiết gia công. Mối quan hệ này có thẻ được thiết lập thông qua việc đặt dụng cụ và chi tiết gia công trong một hệ tọa độ. Hệ tọa độ Decac được sử dụng làm hệ tọa độ trong máy CNC.
Khi đó không gian được giới hạn bởi ba kích thước của hệ tọa độ Decac gắn với máy mà hệ điều khiển máy có thể nhận biết được gọi là vùng gia công.
3.1.3. Nguyên tắc xác định hệ trục tọa độ trên máy CNC
- Để xác định các trục toạ độ ta dựa trên quy tắc bàn tay phải, bao gồm ngón giữa, ngón trỏ và ngón cái của bàn tay phải. Ngón cái xác định hướng của trục X, ngón trỏ chỉ trục Y, và ngón giữa chỉ trục Z.
.......................................................
CHƯƠNG V: KẾT LUẬN
5.1. Đánh giá kết quả đạt được.
●Đồ án hoàn tất và đạt được những kết quả rất đáng khích lệ như sau:
•Gia công hoàn toàn tự động theo yêu cầu.
•Độ chính xác gia công là tương đối với sai số ít.
•Phần mềm điều khiển hoạt động tương đối ổn định và đáp ứng được yêu cầu đề ra. Máy làm việc êm và ít tiếng ồn.
• Nghiên cứu này đã thiết kế và chế tạo thành công một công cụ hỗ trợ hiệu quả cho việc cắt khắc vật bằng tia laser đốt nóng. Ứng dụng những kiến thức đã học được tại trường để tạo thành một sản phẩm cụ thể, phục vụ cho sản xuất. Ngoài ra đề tài còn góp phần làm các sản phẩm CNC trở nên phổ biến tiến tự động hóa một số khâu sản xuất phức tạp, lặp lại năng xuất cao.
5.2. Những hạn chế và hướng khắc phục.
• Trong quá trình thực hiện đồ án, do thời gian làm đồ án chỉ giới hạn trong vòng 3 tháng và kiến thức cũng như tay nghề còn hạn hẹp về nhiều mặt. Đồ án vẫn còn nhiều hạn chế và còn nhiều vấn đề chưa giải quyết được.
5.2.1. Về thiết kế cơ khí.
•Do còn ít kinh nghiệm trong việc gia công cơ khí, mà mô hình máy cắt – khắc CNC này lại có những chi tiết đòi hỏi độ chính xác cao đặc biệt là cơ cấu vitme – đai ốc và thanh trượt, do đó mô hình chế tạo được mới chỉ dừng lại ở độ chính xác tương đối, chỉ có thể sử dụng làm mô hình nghiên cứu mà chưa thể phát triển theo hướng ứng dụng trong thực tế.
• Để khắc phục được nhược điểm trên, cần có một bản thiết kế hoàn chỉnh toàn bộ các chi tiết của máy với dung sai đầy đủ và có thể đặt hàng gia công ở những cơ sở gia công cơ khí chính xác..
5.2.2. Về bộ điều khiển động cơ
• Bộ điều khiển thực hiện điều khiển động cơ bước theo điều khiển vòng hở do đó không thể tránh khỏi sai xót. Để khắc phục nhược điểm nay, ta có thể sử dụng động cơ DC servo dùng cho điều khiển vị trí với điều khiển vòng kín để tăng độ chính xác cũng như độ tin cậy cho toàn bộ máy.
5.3. Hướng phát triển của đề tài.
•Bằng việc thay thế đầu cắt Laser có công suất lớn hơn sản phẩm có thể ứng dụng vào các ngành công nghiệp chế tạo khuôn mẫu chính xác cao.
• Có thể cải tiến thành máy Laser cnc dùng động cơ DC servo để có độ chính xác.
•Có thể ứng dụng làm máy cắt plasma nếu sử dụng đầu cắt plasma.
•Sử dụng các thành phần để lắp ráp máy có độ chính xác cao,chất lượng đồng đều để nâng cao độ chính xác máy.
5.4 Hướng dẫn sử dụng và bảo quản.
5.4.1Hướng dẫn sử dụng.
•Máy sử dụng nguồn điện 220V, 60Hz, đầu tiên cấp nguồn cho tụ điện, sau đó kéo MCCB lên vị trí ON và đèn led đỏ sẽ sáng báo hiệu đã có điện đi qua.
|
Hình 5.1: Xác lập kết nối giữa máy tính và máy laser |
•Sau đó cắm cáp nối USB vào máy tính, và khởi động chương trình ARDUINO lên để xác lập kết nối như hình.
- Tiếp theo khởi động phần mềm điều khiển GRBL CONTROLLER lên để tiến hành nạp file để gia công.
Hình 5.2: Giao diện làm việc của phần mềm Grbl Control.
•Nếu trong quá trình gia công máy chạy quá hành trình của thanh trượt thì nhấn nút dừng khẩn cấp màu đỏ trên tụ điện, và reset trên phần mềm điều khiển và tắt MCCB.
5.4.2 Bảo quản máy.
•Để máy hoạt động êm và hiệu quả lâu nên tra nhớt vào vítme bi và các thanh trượt thường xuyên để chống sét.




