ĐỒ ÁN TỐT NGHIỆP CƠ CẤU CHẤP HÀNH PLC MÔ HÌNH LƯU KHO
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN CƠ CẤU CHẤP HÀNH PLC MÔ HÌNH LƯU KHO, ĐỒ ÁN TỐT NGHIỆP, CƠ CẤU CHẤP HÀNH PLC, MÔ HÌNH LƯU KHO
LỜI MỞ ĐẦU
&
Nước ta đang trong công cuộc công nghiệp hóa hiện đại hóa để từng bước bắt kịp sự phát triển của các nước trong khu vực và thế giới. Công nghiệp sản xuất hàng hóa đóng vai trò quan trọng trong việc phát triển kinh tế. Việc tự động hóa là sự lựa chọn không tránh khỏi trong mọi lĩnh vực nhằm tạo ra sản phẩm có chất lượng cao, tăng khả năng cạnh tranh mạnh mẽ trên thị trường.
Các trang thiết bị máy móc phục vụ trong công nghiệp ở nước ta đa số còn lạc hậu, song do nhu cầu sản xuất số máy này vẫn được khai thác. Với nguồn vốn đầu tư cho việc mua sắm các thiết bị máy móc mới còn hạn chế, nên việc nâng cấp các hệ thống máy móc cũ nhằm nâng cao mức độ tự động hóa, tăng năng suất trong sản xuất, thì việc đầu tiên là thay thế hệ thống điều khiển cũ sử dụng rơle bằng một thiết bị điều khiển có thể lập trình được là PLC nhằm làm cho mạch điều khiển của hệ thống gọn nhẹ, hoạt động chính xác đáng tin cậy hơn và quan trọng nhất là dễ dàng thay đổi chương trình điều khiển khi có yêu cầu. PLC là một thiết bị điều khiển công nghiệp mới đã và đang được sử dụng rộng rãi ở Việt Nam.
Vấn đề tự động hóa trong công nghiệp để giảm bớt lao động chân tay và nâng cao năng suất lao động, là một trong những đề tài được các bạn sinh viên, các thầy cô ở những trường kỹ thuật quan tâm và nghiên cứu nhiều nhất. Việc khảo sát và sử dụng phần mềm lập trình cho PLC họ SIMATIC S7 để điều khiển cánh tay gấp luu kho sản phẩm là nội dung của tập đồ án mà nhóm thực hiện đề tài trình bày.
LỜI CẢM ƠN
&
Nhóm thực hiện đề tài xin chân thành bày tỏ lòng biết ơn sâu sắc đến các Thầy Cô trong Khoa Điện – Điện Lạnh trường , đặc biệt là các Thầy Cô trong bộ môn Điện Công Nghiệp đã truyền thụ những kiến thức quý báu cho tất cả sinh viên trong những năm học qua.
Nhóm thực hiện đề tài xin chân thành cảm ơn, giảng viên trường đã tận tâm hướng dẫn, cung cấp tài liệu và tạo mọi điều kiện thuận lợi để nhóm thực hiện đề tài có thể hoàn thành tập đồ án này.
Và xin chân thành cảm ơn những người bạn, những người thân đã giúp đỡ và động viên trong quá trình học tập và trong quá trình thực hiện đồ án.
MỤC LỤC
Mở đầu:............................................................................................................................. Trang
Tổng quan mô hình .......................................................................................................... 1
Chương 1: Động cơ điện một chiều ............................................................................... 2
1. 1 Giới thiệu........................................................................................................... 2
.1.1 Khái niệm.................................................................................................. 2
.1.2 Cấu tạo...................................................................................................... 2
1.2 Ưu điểm của động cơ điện một chiều .......................................................... 2
1.3 Cấu tạo động cơ điện một chiều.................................................................... 3
1.3.1 Phần tĩnh hay stato
1.3.2 Phần quay hay roto................................................................................ 4
1.4 Phân loại động cơ điện một chiều.................................................................. 5
1.4.1 Động cơ điện một chiều kích từ độc lập............................................. 5
1.4.2 Động cơ điện một chiều kích thích song song................................... 6
1.4.3 Động cơ một chiều kích từ nối tiếp...................................................... 7
1.4.4 Động cơ một chiều kích thích hỗn hợp............................................... 7
1.5 Đặc tính cơ của động cơ điện một chiều....................................................... 8
1.6 - Các phương pháp điều chỉnh động cơ một chiều....................................... 8
1.6.1 Điều chỉnh bằng cách thay đổi điện áp............................................... 8
1.6.2 Điều chỉnh bằng cách thay đổi từ thông ............................................ 9
1.6.3 Điều chỉnh bằng cách thay đổi điện trở phụ.................................... 11
Chương 2: Động cơ servo .............................................................................................. 13
2.1 Khái niệm ........................................................................................................ 13
2.2 Những hình thức điều chỉnh động cơ servo............................................... 14
2.2.1 Điều khiển vòng hở ............................................................................. 14
2.2.2 Điều khiển nửa kín .............................................................................. 15
2.2.3 Điều khiển vòng kín............................................................................ 15
2.3 Ứng dụng của động cơ servo........................................................................ 16
2.3.1 Cơ cấu định vị đơn giản ..................................................................... 16
2.3.2 Cơ cấu định vị linh hoạt ..................................................................... 16
2.3.3 Cơ cấu chuyển động định hướng ...................................................... 17
Chương 3 : Cảm biến từ................................................................................................. 18
3.1 Định nghĩa cảm biến......................................................................................... 18
3.2 Cảm biến từ trường........................................................................................... 18
3.3 Cảm biến bằng tia............................................................................................. 19
3.3.1 Cảm biến bằng tia rẽ nhánh................................................................ 19
3.3.2 Cảm biến bằng tia phản hồi................................................................ 19
3.3.3 Cảm biến thu phát bằng tia................................................................. 20
3.4 Cảm biến cảm ứng từ........................................................................................ 21
3.5 Cảm biến điện dung.......................................................................................... 22
Chương 4: Cảm biến quang .......................................................................................... 24
4.1 Tính chất và đơn vị đo ánh sáng.................................................................. 24
4.1.1 Tính chất của ánh sáng ....................................................................... 24
4.1.2 Các đơn vị đo quang............................................................................ 25
4.2 Cảm biến quang dẫn....................................................................................... 26
4.2.1 Hiệu ứng quang dẫn............................................................................. 26
4.2.2 Tế bào quang dẫn ................................................................................ 30
4.2.3 Photodiot .............................................................................................. 33
4.2.4 Phototranzito........................................................................................ 41
4.2.5 Phototranzito hiệu ứng trường............................................................ 44
4.3 Cảm biến quang điện phát xạ....................................................................... 45
4.3.1 Hiệu ứng quang điện phát xạ.............................................................. 45
4.3.2 Tế bào quang điện chân không.......................................................... 46
4.3.3 Tế bào quang điện dạng khí................................................................ 47
Chương 5: Tổng quan về PLC S7-300......................................................................... 48
5.1 Giới thiệu PLC S7-300................................................................................... 48
5.1.1 Thiết bị điều khiển logic lập trình..................................................... 48
5.1.2 Các tín hiệu kết nối PLC..................................................................... 49
5.1.3 Các modul của PLC S7-300................................................................ 50
5.1.4 Cấu hình của một trạm PLC S7-300.................................................. 52
5.1.5 Tổ chức bộ CPU.................................................................................... 55
5.1.6 Vòng quét chương trình của PLC....................................................... 58
5.1.7 Bộ nhớ PLC........................................................................................... 59
5.1.8 Các kiểu dữ liệu của PLC S7-300...................................................... 61
5.1.9 Ngôn ngữ lập trình của PLC................................................................ 62
5.1.10 Những khối OB đặc biệt.................................................................... 62
5.2 Ngôn ngữ lập trình cơ bản _ LAD................................................................ 63
5.2.1 Các lệnh về bit...................................................................................... 63
5.2.2 Các lệnh về Timer và Counter............................................................ 66
Chương 6: Tìm hiểu về khí nén..................................................................................... 71
6.1 Khả năng ứng dụng của khí nén................................................................... 71
6.1.1 Trong lĩnh vực điều khiển................................................................... 71
6.1.2 Trong hệ thống truyền động............................................................... 71
6.2 Những ưu diểm – nhược điểm........................................................................ 71
6.2.1 Ưu điểm................................................................................................. 71
6.2.2 Nhược điểm........................................................................................... 72
6.3 Nguyên lý truyền động................................................................................... 72
6.4 Đơn vị đo và các đại lượng cơ bản................................................................ 73
6.4.1 Áp suất................................................................................................... 73
6.4.2 Lực.......................................................................................................... 73
6.4.3 Công suất............................................................................................... 74
6.5 Cơ cấu chấp hành............................................................................................. 74
6.5.1 Xy lanh.................................................................................................. 74
6.5.1.1 Xy lanh tác dụng đơn............................................................ 75
6.5.1.2 Xy lanh màng......................................................................... 76
6.5.1.3 Xy lanh tác dụng kép............................................................ 76
6.5.2 Van......................................................................................................... 76
6.5.2.1 Van đảo chiều........................................................................ 76
6.5.2.1.1 Van đảo chiều có vị trí “0”....................................... 78
6.5.2.1.2 Van đảo chiều không có vị trí “0”........................... 81
6.5.2.2 Van chặn................................................................................. 82
6.5.2.3 Van một chiều........................................................................ 83
6.5.2.4 Van logic OR.......................................................................... 83
6.5.2.5 Van logic AND....................................................................... 83
6.5.2.6 Van xả khí nhanh.................................................................. 83
6.5.2.7 Van tiết lưu............................................................................. 84
6.5.2.8 Van điều chỉnh thời gian...................................................... 84
6.5.2.9 Van chân không..................................................................... 85
6.5.2.10 Van lọc khí........................................................................... 85
TỔNG QUAN VỀ MÔ HÌNH
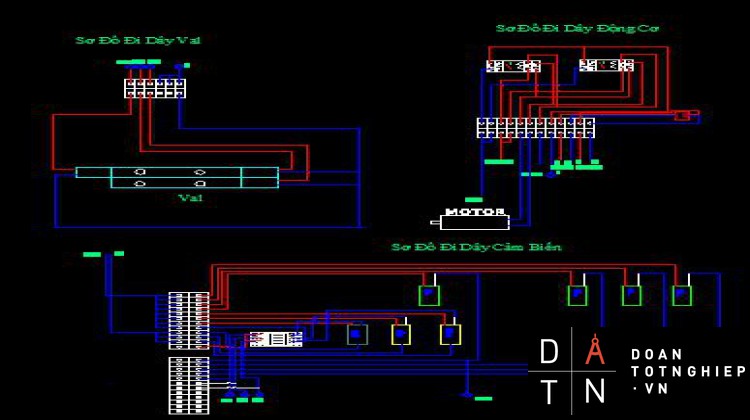
- Giới thiệu về mô hình:
Mô hình lưu kho là một mô hình được điều khiển hoàn toàn tự dộng bởi PLC S7-300
Mô hình sẽ nhận sản phẩm (phôi) từ mô hình sấy và được cảm biến quang phát hiện. PLC sẽ điều khiển cho tay gấp, động cơ DC, động cơ servo để đưa sản phẩm về đúng vị trí cần lưu kho
-
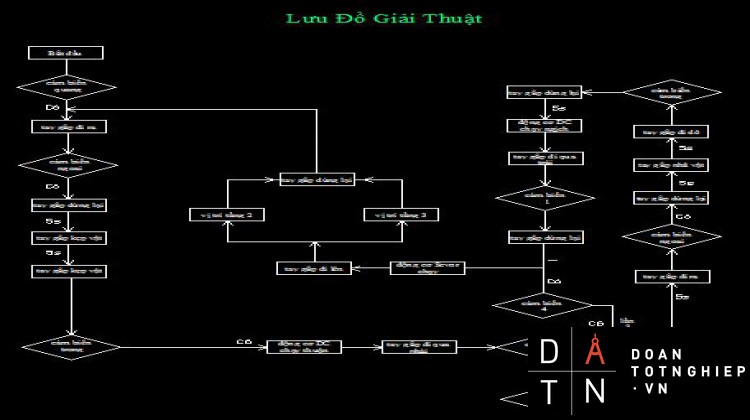
Nguyên lý hoạt động của mô hình:
- Cảm biến quang phát hiện vật → tay gấp đi ra→kẹp vật → tay gấp đi vào→ động cơ DC chạy→gặp cảm biến từ thứ hai DC dừng→tay gấp đi ra→ nhả vật→ tay gấp đi vào→DC chạy ngược đưa tay gấp trở về vị trí ban đầu (gặp cảm biến từ đầu tiên DC dừng lại)
- Tương tự như vậy cho cảm biến từ thứ ba và thứ tư.(đủ 3 vị trí ở tầng 1)
- Cảm biến quang phát hiện vật → tay gấp đi ra→kẹp vật → tay gấp đi vào →servo chạy đưa tấp lên cao 9cm thì dừng→DC chay→ gặp cảm biến từ thứ hai DC dừng → tay gấp đi ra→ nhả vật→ tay gấp đi vào→DC chạy ngược đưa tay gấp trở về vị trí ban đầu (gặp cảm biến từ đầu tiên DC dừng lại)→servo chạy ngược đưa tay gấp về lại tầng 1, tiếp tục thực hiện cho đến khi vật đã đủ 3 vị trí kho ở tầng 2
- Sau khi kẹp vật servo lại đưa tay gấp lên cao 18cm để đưa vật vào đủ 3 vị trí kho ở tầng 3→servo chạy ngược đưa tay gấp về vị trí tầng 1→hệ thống dừng
CHƯƠNG 1: ĐỘNG CƠ ĐIỆN MỘT CHIỀU
1.1. Giới thiệu
Cho đến nay động cơ điện một chiều vẫn chiếm một vị trí quan trọng trong hệ điều chỉnh tự động truyền động điện, nó được sử dụng rộng rãi trong hệ thống đòi hỏi có sự chính xác cao vùng điều chỉnh rộng và qui luật điều chỉnh phức tạp. Cùng với sự tiến bộ của văn minh nhân loại chúng ta có thể chứng kiến sự phát triển rầm rộ kể cả về qui mô lẫn trình độ của nền sản xuất hiện đại. Trong sự phát triển đó ta cũng có thể rõ ràng nhận ra và khẳng định rằng điện năng và máy tiêu thụ điện năng dóng vai trò không thể thiếu được. Nó luôn đi trước một bước làm tiền đề nhưng cũng làm mũi nhọn quyết định sự thành công của cả một hệ thống sản xuất công nghiệp. Không một quốc gia nào, một nền sản xuất nào không sử dụng điện và máy điện.
1.1.1 Khái niệm:
Động cơ điện nói chung và động cơ điện một chiều nói riêng là thiết điện từ quay, làm việc theo nguyên lý điện từ, khi đặt vào trong từ trường một dây dẫn và cho dòng điện chạy qua dây dẫn thì từ trường sẽ tác dụng một lực từ vào dòng điện (vào dây dẫn) và làm dây dẫn chuyển động. Động cơ điện biến đổi điện năng thành cơ năng.
- Cấu tạo
Gồm hai phần: - phần đứng yên (gọi là phần tĩnh hay stato )
- phần chuyển động (gọi là phần quay hay roto )
1.2 Ưu điểm của động cơ điện một chiều:
Do tính ưu việt của hệ thống điện xoay chiều: để sản xuất, để truyền tải..., cả máy phát và động cơ điện xoay chiều đều có cấu tạo đơn giản và công suất lớn, dễ vận hành... mà máy điện (động cơ điện) xoay chiều ngày càng được sử dụng rộng rãi và phổ biến. Tuy nhiên động cơ điện một chiều vẫn giữ một vị trí nhất định như trong công nghiệp giao thông vận tải, và nói chung ở các thiết bị cần điều khiển tốc độ quay liên tục trong phạm vi rộng (như trong máy cán thép, máy công cụ lớn, đầu máy điện...). Mặc dù so với động cơ không đồng bộ để chế tạo động cơ điện một chiều cùng cỡ thì giá thành đắt hơn do sử dụng nhiều kim loại màu hơn, chế tạo bảo quản cổ góp phức tạp hơn ... nhưng do những ưu điểm của nó mà máy điện một chiều vẫn không thể thiếu trong nền sản xuất hiện đại.
Ưu điểm của động cơ điện một chiều là có thể dùng làm động cơ điện hay máy phát điện trong những điều kiện làm việc khác nhau. Song ưu điểm lớn nhất của động cơ điện một chiều là điều chỉnh tốc độ và khả năng quá tải. Nếu như bản thân động cơ không đồng bộ không thể đáp ứng được hoặc nếu đáp ứng được thì phải chi phí các thiết bị biến đổi đi kèm (như bộ biến tần....) rất đắt tiền thì động cơ điện một chiều không những có thể điều chỉnh rộng và chính xác mà cấu trúc mạch lực, mạch điều khiển đơn giản hơn đồng thời lại đạt chất lượng cao.
Ngày nay hiệu suất của động cơ điện một chiều công suất nhỏ khoảng 75% ÷ 85%, ở động cơ điện công suất trung bình và lớn khoảng 85% ÷ 94%. Công suất lớn nhất của động cơ điện một chiều vào khoảng 100000kw điện áp vào khoảng vài trăm cho đến 1000v. Hướng phát triển là cải tiến tính năng vật liệu, nâng cao chỉ tiêu kinh tế của động cơ và chế tạo những máy công suất lớn hơn đó là cả một vấn đề rộng lớn và phức tạp.
1.3 Cấu tạo của động cơ điện một chiều:
Động cơ điện một chiều có thể phân thành hai phần chính: phần tĩnh và phần động.
1.3.1 Phần tĩnh hay stato:
Hay còn gọi là phần kích từ động cơ, là bộ phận sinh ra từ trường. Gồm có mạch từ và dây quấn kích thích lồng ngoài mạch từ (nếu động cơ được kích từ băng nam châm điện).
- mạch từ được làm băng sắt từ (thép đúc,thép đặc )
- dây quấn kích thích hay còn gọi là dây quấn kích từ được làm bằng dây điện từ (êmay). Các cuộn dây điện từ này được nối tiếp vơi nhau.
- Cực từ chính:
Là bộ phận sinh ra từ trường gồm có lõi sắt cực từ và dây quấn kích từ lồng ngoài lõi sắt cực từ. Lõi sắt cực từ làm bằng những lá thép kỹ thuật điện hay thép cacbon dày 0,5 đến 1mm ép lại và tán chặt. Trong động cơ điện nhỏ có thể dùng thép khối. Cực từ được gắn chặt vào vỏ máy nhờ các bulông. Dây quấn kích từ được quấn bằng dây đồng bọc cách điện và mỗi cuộn dây đều được bọc cách điện kỹ thành một khối tẩm sơn cách điện trước khi đặt trên các cực từ. Các cuộn dây kích từ được đặt trên các cực từ này được nối tiếp với nhau.
Nhiệm vụ chính của cực từ chính và dây quấn kích từ tạo ra từ thông chính trong máy .
- Cực từ phụ:
Cực từ phụ được đặt trên các cực từ chính và dùng để cải thiện đổi chiều. Lõi thép của cực từ phụ thường làm bằng thép khối và trên thân cực từ phụ có đặt dây quấn mà cấu tạo giống như dây quấn cực từ chính. Dây quấn cực từ phụ được đấu nối tiếp với dây quấn phần ứng (dây quấn Roto) .
Nhiệm vụ của cực từ phụ là để làm giảm sự xuất hiện tia lửa điện trên bề mặt chổi than và cổ góp .
- Gông từ:
Gông từ dùng làm mạch từ nối liền các cực từ, đồng thời làm vỏ máy. Trong động cơ điện nhỏ và vừa thường dùng thép dày uốn và hàn lại. Trong máy điện lớn thường dùng thép đúc. Có khi trong động cơ điện nhỏ dùng gang làm vỏ máy.
- Các bộ phận khác:
Bao gồm:
- Nắp máy : Để bảo vệ máy khỏi những vật ngoài rơi vào làm hư hỏng dây quấn và an toàn cho người khỏi chạm vào điện. Trong máy điện nhỏ và vừa nắp máy còn có tác dụng làm giá đỡ ổ bi. Trong trường hợp này nắp máy thường làm bằng gang.
- Cơ cấu chổi than: để đưa dòng điện từ phần quay ra ngoài. Cơ cấu chổi than bao gồm có chổi than đặt trong hộp chổi than nhờ một lò xo tì chặt lên cổ góp. Hộp chổi than được cố định trên giá chổi than và cách điện với giá. Giá chổi than có thể quay được để điều chỉnh vị trí chổi than cho đúng chỗ. Sau khi điều chỉnh xong thì dùng vít cố định lại.
1.3.2. Phần quay hay roto:
- Lõi sắt phần ứng .
Lõi sắt phần ứng dùng để dẫn từ . Thường làm bằng lá thép kĩ thuật điện dày 0.5(mm) phủ cách điện mỏng ở hai mặt rồi ép chặt lại để giảm tổn hao do dòng điện xoáy gây nên. Trên lá thép có dập hình dạng rãnh để sau khi ép lại thì đặt dây quấn vào .
- Dây quấn phần ứng .
Dây quấn phần ứng là thành phần sinh ra sức điện động và có dòng điện chạy qua. Dây quấn phần ứng thường làm bằng dây đồng có bọc cách điện. Dây quấn được bọc cách điện cẩn thận với rãnh của lõi thép .
- Cổ góp .
Cổ góp (còn gọi là vành góp hay vành đổi chiều) dùng để đổi chiều dòng điện xoay chiều thành một chiều . Cổ góp gồm nhiều phiến đồng ghép cách điện với nhau. Bề mặt cổ góp phải được gia công với độ nhẵn cao để đảm bảo tiêp xúc giũa chổi than và cổ góp . Cổ góp đặt đồng tâm với trục quay để hạn chế phát sinh tia lửa điện .
- Các bộ phận khác .
- Cánh quạt : dùng để quạt gió làm nguội máy .
- Trục máy : Trên đó đặt lõi sắt phần ứng, cổ góp cánh quạt và ổ bi. Trục máy thường làm bằng thép cácbon tốt .
Nguyên lý hoạt động của động cơ điện một chiều:
Động cơ điện một chiều hoạt đông dựa trên hiện tượng cảm ứng điện từ. Khi đặt vào trong từ trường một dây dẫn và cho dòng điện chạy qua dây dẫn thì từ trường sẽ tác dụng một lực từ vào dòng điện (vào dây dẫn) và làm cho dây dẫn chuyển động ,chiều của từ lực được xác định bằng quy tắc bàn tay trái..
Nguyên lý: Khi cho dòng điện chạy qua cuộn dây kích từ , sẽ tạo ra từ trường tác dụng một lực từ vào các dây dẫn của rôto khi có dòng chạy qua sẽ tạo mô men làm quay roto .
1.4 Phân loại động cơ điện một chiều:
Dựa vào cách nối dây quấn phần ứng với dây quấn kích từ động cơ điện một chiều được chia ra làm bốn loại sau:
1.4.1 Động cơ điện một chiều kích từ độc lập= Eưđm + RưIưđm
Hình 1.1: Động cơ điện một chiều kích từ độc lập
Trong đó : Uđm- điện áp định mức .
Iđm- dòng điện định mức trong mạch chính .
Iktđm- dòng điện kích từ định mức .
Pđm- công suất cơ đầu cần trục cân bằng với tải .
ηdm- hiệu suất định mức của động cơ .
1.4.2 Động cơ điện một chiều kích thích song song:
Hình 1.2: Động cơ điện một chiều kích thích song song
1.4.3 Động cơ một chiều kích từ nối tiếp
Hình 1.3: Động cơ một chiều kích từ nối tiếp
Uđm = Eưđm+ RIưđm .R= Rư + Rkt .
1.4.4 Động cơ một chiều kích thích hỗn hợp
Động cơ điện kích từ hỗn hợp là động cơ điện vừa có kích từ song song vừa có kích nối tiếp trong đó kích từ song song đóng vai trò chủ yếu .
1.5 Đặc tính cơ của động cơ điện một chiều:
Đặc tính cơ của động cơ điện một chiều là quan hệ giữa tốc độ quay và mômen quay của động cơ:
ω = f(M) hoặc n = F(M)
trong đó: ω _ tôc độ góc (rad/s)
n _ tốc độ quay (v/ph)
M _ momen (Nm)
Có hai loại đặc tính cơ : đặc tính cơ tự nhiên và đặc tính cơ nhân tạo:
a) Đặc tính cơ tự nhiên b) Đặc tính cơ nhân tạo
1.6 Các phương pháp điều chỉnh tốc độ động cơ điện một chiều:
Từ phương trình đặc tính cơ :
Ta có ba phương pháp điều chỉnh tốc độ động cơ điện một chiều :
1.6.1. Điều chỉnh bằng cách thay đổi điện áp đặt vào phần ứng động cơ:
Trong thực tế người ta thường dùng phương pháp giảm điện áp phần ứng động cơ và giữ từ thông Ø = Ødm = const, điện trở R = Rư .
Khi giảm điện áp thì:
Do đó ta thu được họ các đường đặc tính cơ sau :
Hình 1.4: Họ các đường đặc tính cơ khi thay đổi điện áp
+ Nhận xét : Khi ta giảm điện áp đặt vào phần ứng động cơ thì tốc độ không tải giảm xuống,còn độ xụt tốc độ không đổi. Điện áp phần ứng càng giảm ,tốc độ động cơ càng nhỏ. Do đó ta thu được họ các đường đặc tính cơ song song với đường đặc tính cơ tự nhiên ,tức độ cứng đặc tính cơ không đổi.
1.6.2. Điều chỉnh tốc độ động cơ bằng cách thay đổi từ thông trong mạch kích từ động cơ:
Muốn thay đổi từ thông động cơ, ta tiến hành thay đổi dòng điện kích từ của động cơ qua một điện trở mắc nối tiếp mạch kích từ.
Trong thực tế người ta thường dùng phương pháp giảm từ thông Ø và vẫn giữ điện áp U = Uưđm, điện trở R = Rư và cũng không được giảm từ thông Ø gần về 0 .
Khi từ thông Ø giảm thì :Do đó ta thu được họ các đường đặc tính cơ sau :
Hình 1.5: Họ đặc tính cơ khi thay đổi từ thông mạch kích từ động cơ
+ Nhận xét : Như vậy khi giảm từ thông thì tốc độ không tải tăng lên nhưng độ xụt tốc độ tăng gấp 2 lần. Do đó ta thu được họ các đường đặc tính cơ có độ dốc hơn và có tốc độ không tải lớn hơn. Vì vậy càng giảm từ thông thì tốc độ không tải lý tưởng của đặc tính cơ càng tăng, tốc độ động cơ càng lớn . Độ cứng đặc tính cơ giảm .
Phương pháp này rất kinh tế vì việc điều chỉnh tốc độ thực hiện ở mạch kích từ với dòng kích từ là (1 ÷ 10)% dòng định mức phần ứng.
1.6.3. Điều chỉnh tốc độ động cơ bằng cách thay đổi điện trở phụ:
Trong thực tế người ta thêm điện trở phụ vào mạch phần ứng động cơ :
R = Rư + Rf , và giữ điện áp U = Uđm, từ thông Ø = Ødm = const.
Ta có:
Khi tăng điện trở phụ thì :Ta được họ các đường đặc tính cơ như sau :
Hình 1.6: Họ đặc tính động cơ khi thay đổi điện trở phụ mạch phần ứng động cơ
+ Nhận xét : Khi tăng điện trở phụ trong mạch phần ứng động cơ thì độ dốc đặc tính cơ càng lớn ,đặc tính cơ mềm và độ ổn định tốc độ càng kém sai số tốc độ càng lớn. Tốc độ không tải không đổi và = ω0, còn độ sụt tốc độ Δω tăng. Khi đó ta được họ các đường đặc tính cơ nhân tạo cùng đi qua điểm tốc độ không tải (0, ω0 ) và độ rốc tăng khi điện trở Rf càng lớn, tức là độ cứng của đặc tính cơ giảm .
KẾT LUẬN : Cả 3 phương pháp trên đều điều chỉnh được tốc độ động cơ điện một chiều nhưng chỉ có phương pháp điều chỉnh tốc độ động cơ điện một chiều bằng cách thay đổi điện áp Uư đặt vào phần ứng của động cơ là tốt nhất và hay được sử dụng nhất vì nó thu được đặc tính cơ có độ cứng không đổi, điều chỉnh tốc độ bằng phẳng và không bị tổn hao .
CHƯƠNG 2: ĐỘNG CƠ SERVO
2.1 Khái niệm
Động cơ servo là thiết bị được điều khiển bằng chu trình kín. Từ tín hiệu hồi tiếp vận tốc/vị trí, hệ thống điều khiển số sẽ điều khiển họat động của một động cơ servo. Với lý do nêu trên nên sensor đo vị trí hoặc tốc độ là các bộ phận cần thiết phải tích hợp cho một động cơ servo. Đặc tính vận hành của một động cơ servo phụ thuộc rất nhiều vào đặc tính từ và phương pháp điều khiển động cơ servo. Có 3 loại động cơ servo được sử dụng hiện nay đó là động cơ servo AC dựa trên nền tảng động cơ AC lồng sóoc; Động cơ servo DC dựa trên nền tảng động cơ DC; và động cơ servo AC không chổi than dựa trên nền tảng động cơ không đồng bộ.
2.2 - Những hình thức điều chỉnh động cơ servo
2.2.1 - Điều khiển vòng hở (open loop):
Nhìn vào hình vẽ minh họa chăc các bạn hiểu điều khiển vòng hở là như thế nào. Bộ điều khiển vị trí chỉ thị lệnh cho động cơ step quay, nhưng chỉ quay mà thôi, quay tới quay lui mà không cần biết quay bao nhiêu vòng cho bàn chạy đến vị trí nào vân vân, nó chỉ dừng khi có tác động từ con người hay từ một hệ thống ra lệnh nào đó bên ngoài nó.
2.2.2 Điều khiển nửa kín
Hình này có điểm khác so với hình trên. Đó là số vòng quay của step motor được mã hóa và hồi tiếp về bộ điều khiển vị trí. Nghĩa là đến đây thì động cơ step chỉ quay một số vòng nhất định tùy thuộc vào “lênh” của bộ điều khiển vị trí, nói cách khác bộ điều khiển vị trí có thể ra lệnh cho chạy hoặc dừng động cơ theo một lập trình sẵn có tùy thuộc vào ý đồ của người thiết kế. Tuy nhiên cái mà chúng ta cần điều khiển chính là vị trí của bàn chạy chứ không phải là việc động cơ quay bao nhiêu vòng thì dừng vân vân. Đối tượng là cái bàn chạy ;))
2.2.3 – Điều khiển vòng kín
Hình này rõ ràng là khác hẳn so với 2 hình kia. Vòng hồi tiếp lúc này không phải hồi tiếp từ trục động cơ về mà vòng hồi tiếp lúc này là hồi tiếp vị trí của bàn chạy thong qua một thướt tuyến tính. Lúc này bộ điều khiển vị trí không điều khiển số vòng quay của motor nữa mà nó điều khiển trực tiếp vị trí của bàn chạy. Nghĩa là các sai số tĩnh do sai khác trong các bánh răng hay hệ thống truyền động được loại bỏ. Và vì sao nó gọi là vòng kín thì xin trả lời rằng vòng điều khiển lệnh và hồi tiếp khép một vòng kín quét lên toàn bộ thiết bị liên quan cho nên nó được gọi là vòng kín.
2.3 - Ứng dụng của động cơ servo: cơ cấu định vị
Hệ thống servo không đơn giản chỉ là một phương pháp thay thế điều khiển vị trí và tốc độ của các cơ cấu cơ học, ngoài những thiết bị cơ khí đơn giản, hệ thống servo bây giờ đã trở thành một hệ thống điều khiển chính trong phương pháp điều khiển vị trí và tốc độ. Sau đây là một số ví dụ về các cơ cấu định vị:
2.3.1 – Cơ cấu định vị đơn giản
Các vị dụ về cơ cấu này đó là xy lanh hay trục cam hay bộ ly hợp và phanh hãm
.......................................................................
Hình 5.3: Cấu hình tối đa của một trạm PLC S7-300 trên bốn thanh rack
Những thành phần cơ bản của một trạm PLC S7-300:
|
Thành phần |
Chức năng |
Hình ảnh |
|
Rail |
Là nơi để gắn CPU và các module. |
- |
|
Module nguồn ( Power Supply – PS) |
Chuyển đổi điện áp 120/230VAC sang 24VDC để cung cấp nguồn cho S7-300 và các module khác. |
|
|
CPU |
Thực hiện chương trình mà người dùng đã lập trình. Cung cấp nguồn 5V cho Backplane Bus. Kết nối các nút khác trong mạng MPI thông qua giao diện MPI. |
|
|
Module tín hiệu ( Signal Module – SM) |
Có chức năng nhận và truyền các tín hiệu với các đối tượng điều khiển. |
|
|
Module chức năng (Function Module – FM) |
Có chức năng điều khiển riêng như: điều khiển động cơ bước, động cơ servo, điều khiển bộ đém tốc độ cao, điều khiển hồi tiếp... |
|
|
Bộ xử lý truyền thông (Communication Proceesor – CP) |
Phục vụ truyền thông trong mạng giữa các PLC với nhau hoặc giữa PLC với PC |
|
|
Các điểm nối của SIMATIC |
Là nơi dùng để đấu dây cho các module Digital. |
|
|
Module kết nối ( Interface Module – IM) |
Có chức năng kết nối các module mở rộng lại với nhau và được quản lý bởi CPU. |
|
|
Cáp nối Profibus và đầu nối dây |
Dùng để liên kết các trạm trong MPI hoặc mạng Profibus |
|
|
Cáp nối thiết bị lập trình |
Có chức năng kết nối CPU với thiết bị lập trình, máy tính (PC). |
|
|
Bộ chuyển tiếp RS – 485 |
Khuếch đại những tín hiệu trong mạng MPI hoặc mạng Profibus rồi kết nối các tín hiệu. |
|
|
Thiết bị lập trình (PG), máy tính (PC) và phần mềm STEP 7 |
Lập trình chương trình điều khiển rồi truyền cho CPU |
5.1.5. Tổ chức bộ nhớ CPU:
Vùng nhớ chứa các thanh ghi: ACCU1, ACCU2, AR1, AR2....
Load Memory: là vùng nhớ chứa chương trình ứng dụng ( do người sử dụng viết) bao gồm tất cả các khối chương trình ứng dụng OB, FC, FB, các khối chương trình trong thư viện hệ thống được sử dụng ( SFC, SFB) và các khối dữ liệu DB. Vùng nhớ này được tạo bởi một phần bộ nhớ RAM của CPU và EEPROM ( nếu có EEPROM). Khi thực hiện động tác xóa bộ nhớ ( MRES) toàn bộ các khối chương trình và khối dữ liệu nằm trong RAM sẽ bị xóa. Cũng như vậy, khi chương trình hay khối dữ liệu được tải ( download) từ thiết bị lập trình ( PG, PC) vào module CPU, chúng sẽ được ghi lên phần RAM của vùng nhớ Load memory.
Work Memory: là vùng nhớ chứa các khối DB đang được mở, khối chương trình ( OB, FC, FB, SFC hoặc SFB) đang được CPU thực hiện và phần bộ nhớ cấp phát cho những tham số hình thức để các khối chương trình này trao đổi tham trị với hệ điều hành và với các khối chương trình khác ( local block). Tại một thời điểm nhất định vùng nhớ Work memory chỉ chứa một khối chương trình. Sau khi khối chương trình đó được thực hiện xong thì hệ điều hành sẽ xóa khỏi Work memory và nạp vào đó khối chương trình kế tiếp đến lượt được thực hiện.
System Memory: là vùng nhớ chứa các bộ đệm vào/ra số (I/Q), các biến cờ (M), thanh ghi C-Word, PV, T-bit của timer, thanh ghi C-Word, PV, C-bit của Counter. Việc truy cập sửa lỗi dữ liệu những ô nhớ này được phân chia bởi hệ điều hành của CPU hoặc do chương trình ứng dụng.
Có thể thấy rằng trong các vùng nhớ được trình bày ở trên không có vùng nhớ nào được dùng làm bộ đệm cho các cổng vào/ra tương tự. Nói cách khác, các cổng vào ra tương tự không có bộ đệm và như vậy mỗi lệnh truy nhập module tương tự ( đọc hoặc gửi giá trị) đều có tác dụng trực tiếp tới các cổng vật lý của module.
|
Tên gọi |
Kích thước truy nhập |
- |
|
Process Input Image (I) Bộ đệm vào số |
I IB IW ID |
|
|
Process Output Image (Q) Bộ đệm ra số |
Q QB QW QD |
|
|
Bit Memory (M) Vùng nhớ cờ |
M MB MW MD |
|
|
Timer (T) |
T0-T255 |
|
|
Counter (C) |
C0--C255 |
|
|
Data Block (DB) Khối dữ liệu share |
DBX DBB DBW DBD |
0.0-65535.7 0-65535 0-65534 0-65532 |
|
Data Block (DI) |
DIX |
0.0-65535.7 |
|
Khối dữ liệu Instance |
DIB DIW DID |
0-65535 0---65534 0-65532 |
|
Local Block (L) Miền nhớ địa phương cho các tham số hình thức |
L LB LW LD |
0.0-65535.7 0-65535 0-65534 0-65532 |
|
Peripheral Input (PI) |
PIB PIW PID |
0-65535 0-65534 0-65532 |
|
Peripheral Output (PQ) |
PQB PQW PQD |
0-65535 0-65534 0-65532 |
Bảng 5.1: Vùng địa chỉ và tầm địa chỉ
Trừ phần bộ nhớ EEPROM thuộc vùng nhớ Load memory và một phần RAM tự nuôi đặc biệt ( non-valatile) dùng để lưu giữ tham số cấu hình trạm PLC như địa chỉ trạm ( MPI address), tên các module mở rộng, tất cả các phần bộ nhớ còn lại ở chế độ mặc định không có khả năng tự nhớ ( non-retentive). Khi mất nguồn nuôi hoặc khi thực hiện công việc xóa bộ nhớ ( MRES), toàn bộ nội dung của phần bộ nhớ non-retentive sẽ bị mất.
5.1.6 Vòng quét chương trình của PLC:
PLC thực hiện chương trình theo chu trình lặp. Mỗi vòng lặp được gọi là vòng quét (scan). Mỗi vòng quét được bắt đầu bằng giai đoạn chuyển dữ liệu từ các cổng vào số tới vùng bộ đệm ảo I, tiếp theo là giai đoạn thực hiện chương trình. Trong từng vòng quét, chương trình được thực hiện từ lệnh đầu tiên đến lệnh kết thúc của khối OB1 ( Block end). Sau giai đoạn thực hiện chương trình là giai đoạn chuyển các nội dung của bộ đệm ảo Q tới các cổng ra số. Vòng quét được kết thúc bằng giai đoạn truyền thông nội bộ và kiểm tra lỗi.
Thời gian cần thiết để PLC thực hiện được một vòng quét gọi là thời gian vòng quét ( Scan time). Thời gian vòng quét không cố định, tức là không phải vòng quét nào cũng được thực hiện lâu, có vòng quét được thực hiện nhanh tùy thuộc vào số lệnh trong chương trình được thực hiện, vào khối dữ liệu được truyền thông.... trong vòng quét đó.
Hình 4.4: Vòng quét của CPU
Như vậy giữa việc đọc dữ liệu từ đối tượng để xử lý, tính toán và việc gửi tín hiệu điều khiển tới đối tượng có một khoảng thời gian trễ đúng bằng thời gian vòng quét. Nói cách khác, thời gian vòng quét quyết định tính thời gian thực của chượng trình điều khiển trong PLC. Thời gian vòng quét càng ngắn, tính thời gian thực của chương trình càng cao.
Nếu sử dụng các khối chương trình đặc biệt có chế độ ngắt, ví dụ như khối OB40, OB80,... Chương trình của các khối sẽ được thực hiện trong vòng quét khi xuất hiện tín hiệu báo ngắt cùng chủng loại. Các khối chương trình này có thể được thực hiện tại mọi điểm trong vòng quét chứ không bị gò ép là phải ở trong gia đoạn thực hiện chương trình. Chẳng hạn nếu một tín hiệu báo ngắt xuất hiện khi PLC đang ở giai đoạn truyền thông và kiểm tra nội bộ, PLC sẽ tạm dừng công việc truyền thông, kiểm tra, để thực hiện khối chương trình tương ứng với khối tín hiệu báo ngắt đó. Với hình thức xử lý tín hiệu ngắt như vậy, thời gian vòng quét sẽ càng lớn khi càng có nhiều tính hiệu ngắt xuất hiện trong vòng quét. Do đó, để nâng cao tính thời gian thực cho chương trình điều khiển tuyệt đối không nên viết chương trình xử lý ngắt quá dài hoặc quá lạm dụng việc sử dụng chế độ ngắt trong chương trình điều khiển.
Tại thời điểm thực hiện lệnh vào/ra, thông thường lệnh không làm việc trực tiếp với cổng vào/ra mà chỉ thông qua bộ đệm ảo của cổng trong vùng nhớ tham số. Việc truyền thông giữa bộ đệm ảo với ngoại vi trong các giai đoạn 1 và 3 do hệ điều hành CPU quản lý. Ở một số module CPU, khi gặp lệnh vào/ra ngay lập tức, hệ thống sẽ cho dừng mọi công việc khác, ngay cả chương trình xử lý ngắt, để thực hiện lệnh trực tiếp với cổng vào/ra.
5.1.7. Bộ nhớ PLC:
- Vùng chứa chương trình ứng dụng: được chia thành 3 miền.
- OB ( Organisation Block): miền chứa chươ trình tổ chức.
- FC ( Function): miền chứa chương trình con, được tổ chức thành hàm và có biến hình thức để trao đổi dữ liệu.
-
FB ( Function Block): miền chứa chương trình con, được tổ chức thành hàm và có khả năng trao đổi dữ liệu với bất cứ một khối chương trình nào khác. Các dữ liệu này phải được xây dựng thành một khối dữ liệu riêng ( Data Block khối DB).
- Vùng chứa tham số của hệ điều hành: chia thành 7 miền khác nhau.
- I ( Process Image Input): miền dữ liệu các cổng vào số, trước khi bắt đầu thực hiện chương trình, PLC sẽ đọc giá trị logic của tất cả các cổng đầu vào và cất giữ chúng trong vùng nhớ I. Thông thường chương trình ứng dụng không đọc trực tiếp trạng thái logic của cổng vào số mà chỉ lấy dữ liệu của cổng vào từ bộ đệm I.
- Q ( Process Image Output): miền bộ đệm các dữ liệu cổng ra số. Kết thúc giai đoạn thực hiện chương trình, PLC sẽ chuyển giá trị logic của bộ đệm Q tới các cổng ra số. Thông thường chương trình không trực tiếp gán giá trị tới tận cổng ra mà chỉ chuyển chúng tới bộ đệm Q.
- M ( Miền các biến cờ): chương trình ứng dụng sử dụng các biến này để lưu giữ các tham số cần thiết và có thể truy nhập nó theo bit (M), byte (MB), từ (MW) hay từ kép (MD).
- T ( Timer): miền nhớ phục vụ bộ thời gian ( Timer) bao gồm việc lưu trữ giá trị thời gian đặt trước ( PV-Preset Value), giá trị đếm thời gian tức thời ( CV-Current Value) cũng như giá trị logic đầu ra của bộ thời gian.
- C ( Counter): miền nhớ phục vụ bộ đếm bao gồm việc lưu trữ giá trị đặt trước (PV-Preset Value), giá trị đếm thời gian tức thời ( CV-Current Value) và giá trị logic đầu ra của bộ đệm.
- PI: miền địa chỉ cổng vào của các module tương tự ( I/O External Input). Các giá trị tương tự tại cổng vào của module tương tự sẽ được module đọc và chuyển tự động theo những địa chỉ. Chương trình ứng dụng này có thể truy cập miền nhớ PI theo từng Byte (PIB), từng từ (PIW) hoặc từng từ kép (PID).
-
PQ: miền địa chỉ cổng ra cho các module tương tự ( I/O External Output). Các gái trị theo những địa chỉ này sẽ được module tương tự chuyển tới các cổng ra tương tự. Chương trình ứng dụng có thể truy nhập miền nhớ PQ theo từng Byte (PQB), từng từ (PQW) hoặc theo từng từ kép (PQD).
- Vùng chứa các khối dữ liệu: được chia làm 2 loại.
- DB ( Data Block): miền chứa dữ liệu được tổ chức thành khối. Kích thước cũng như số lượng khối do người sử dụng quy định, phù hợp với từng bài toán điều khiển. Chương trình có thể truy nhập miền này theo từng bit (DBX), byte (DBB), từ (DBW) hoặc từ kép (DBD).
- L ( Local Data Block): miền dữ liệu địa phương, được các khối chương trình OB, FC, FB tổ chức và sử dụng cho các biến nháp tức thời và trao đổi dữ liệu của biến hình thức với những khối chương trình gọi nó. Nội dung của một khối dữ liệu trong miền nhớ này sẽ bị xóa khi kết thúc chương trình tương ứng trong OB, FC, FB. Miền này có thể truy nhập từ chương trình theo bit (L), byte (LB), từ (LW) hoặc từ kép (LD).
5.1.8 Các kiểu dữ liệu của PLC S7-300:
Một chương trình ứng dụng trong S7-300 có thể sử dụng các kiểu dữ liệu sau:
BOOL: với dung lượng 1 bit và có giá trị 0 hoặc 1 ( đúng hoặc sai).
BYTE: gồm 8 bit, thường được dùng để biểu diễn cho một số nguyên dương trong khoảng từ 0 đến 225 hoặc mã ASCIIc của một kí tự.
WORD: gồm 2 byte để biểu diễn cho một số nguyên dương từ 0 đến 65535.
INT: gồm 2 byte, dùng để biểu diễn một số nguyên từ -32768 đến 32767.
DINT: gồm 4 byte, dùng để biểu diễn một số nguyên từ -2147483648 đến 2147483647.
REAL: gồm 4 byte dùng để biểu diễn một số thức dấu phẩy động.
S5T ( hay S5TIME): khoảng thời gian được tính theo giờ/phút/giây/mili giây.
TOD: biểu diễn giá trị thời gian tính theo giờ/phút/giây.
DATE: biểu diễn giá trị thời gian tính theo năm/tháng/ngày.
CHAR: biểu diễn một hay nhiều kí tự ( nhiều nhất là 4 kí tự).
5.1.9 Ngôn ngữ lập trình của PLC:
Các loại PLC thường có nhiều ngôn ngữ lập trình nhằm phục vụ các đối tượng sử dụng khác nhau. PLC S7-300 có 3 ngôn ngữ lập trình như sau:
Liệt kê lệnh ( STL – Statement List): đây là dạng ngôn ngữ thông thường của máy. Một chương trình được ghép bởi nhiều câu lệnh theo một thuật toán nhất định, mỗi lệnh chiếm một hàng và đều có cấu trúc chung là: tên lệnh + thuật toán.
Dạng thang ( LAD – Ladder Logic): đây là dạng ngô ngỡ đồ họa thích hợp với đối tượng quen thiết kế mạch điều khiển logic.
Dạng hình khối ( FBD – Function Block Diagram): đây là dạng ngô ngỡ đồ họa thích hợp với đối tượng quen thiết kế mạch điều khiển số.
Một chương trình viết trên LAD hoặc FBD có thể chuyển sang được dạng STL nhưng ngược lại thì không. Trong STL có nhiều lệnh nhưng LAD và FBD không có. Như vậy STL là ngôn ngữ mạnh nhất trong ba loại ngô ngữ lập trình cho S7-300.
Do mới làm quen với PLC S7-300 nên nhóm thực hiện đồ án chọn ngôn ngữ LAD làm ngôn ngữ chính để nghiên cứu và thực hiện viết chương trình điều khiển cho hệ thống, thiết bị.
5.1.10 Những khối OB đặc biệt:
Trong khi khối OB1 thực hiện đều đặn từng vòng quét trong giai đoạn thực hiện chương trình ( giai đoạn 2) thì các khối OB khác chỉ thực hiện khi có tín hiệu báo ngắt tương ứng, chúng bao gồm các khối sau:
- OB10 ( Time of Date Interrupt): chương trình trong khối OB10 sẽ được thực hiện khi giá trị của đồng hồ thời gian thực nằm trong một khoảng thời gian đã quy định. OB10 có thể gọi một lần hay nhiều lần cách đều nhau từng phút, từng giờ, từng ngày...
- OB20 ( Time Delay Interrupt): chương trình trong khối OB20 sẽ được thực hiện sau một khoảng thời gian trễ đặt trước kể từ khi gọi chương trình hệ thống SFC32 để đặt thời gian trễ.
- OB35 ( Cyclic Interrupt): chương trình trong khối OB20 sẽ được thực hiện cách đều nhau một khoảng thời gian nhất định. Mặc định thời gian này là 100ms, song ta có thể thay đổi nó trong bảng tham số của CPU nhờ phần mềm STEP7.
- OB40 ( Hardware Interrupt): chương trình trong khối OB20 sẽ được thực hiện khi có tín hiệu ngắt từ ngoại vi đưa vào CPU thông qua cổng vào số onboard đặc biệt, hoặc thông qua module SM, CP, FM.
- OB80 ( Cycle Time Dault): được thực hiện khi vòng quét vượt quá thời gian cực đại đã quy định ( mặc định là 100ms) hoặc có tín hiệu ngắt gọi OB nào đó mà OB này chưa kết thúc ở lượt gọi trước.
- OB81 ( Power Supply Fault): khi có lỗi về nguồn nuôi thì CPU sẽ gọi OB81.
- OB82 ( Diagnostic Interrupt): được gọi khi có phát hiện có sự cố từ các module vào/ra mở rộng. Các module mở rộng này phải có khả năng tự kiểm tra mình.
- OB85 ( Not Load Fault): được gọi khi chương trình có chế độ ngắt nhưng chương trình ngắt lại không có trong OB tương ứng.
- OB87 ( Communication Fault): được gọi khi CPU thấy có lỗi truyền thông.
- OB100 ( Star Up Information): được thực hiện một lần khi CPU chuyển trạng thái từ STOP sang RUN.
- OB121 ( Synchronous Error): được thực hiện khi CPU thấy lỗi logic trong chương trình như sai kiểu dữ liệu hoặc lỗi truy nhập khối DB, FC, FB không có trong CPU.
- OB122 ( Synchronous Error): được thực hiện khi CPU phát hiện có lỗi truy nhập module trong chương trình, ví dụ chương trình có lệnh truy nhập module vào/ra nhưng lại không tìm thấy module này.
5.2 NGÔN NGỮ LẬP TRÌNH CƠ BẢN – LAD:
5.2.1 Các lệnh về bit:
Tiếp điểm thường hở I, Q, M, L, D, T, C
Tiếp điểm thường đóng I, Q, M, L, D, T, C
Lệnh NO
Ngõ ra ( cuộn coil) I, Q, M, L, D
Lệnh Reset bit I, Q, M, L, D, T, C
Lệnh Set bit I, Q, M, L , D
Xác định kết quả tại vị trí được chèn I, Q, M, *L, D
Lệnh Save: lưu giá trị RLO vào bit cờ BR
Lệnh RS ( Reset – Set Flip Flop) I, Q, M, L ,D
|
I0.0 |
I0.1 |
M0.0 |
Q0.0 |
|
0 |
0 |
0 |
0 |
|
1 |
0 |
1 |
0 |
|
0 |
1 |
0 |
1 |
|
1 |
1 |
0 |
1 |
Bảng 4.2: Lệnh RS
Lệnh SR ( Set – Reset Flip Flop) I, Q, M, L ,D
|
I0.0 |
I0.1 |
M0.0 |
Q0.0 |
|
0 |
0 |
0 |
0 |
|
1 |
0 |
1 |
1 |
|
0 |
1 |
0 |
0 |
|
1 |
1 |
0 |
0 |
Bảng 4.3: Lệnh SR
5.2.2 Các lệnh về Timer và Counter :
Lệnh S_PULSE: khi I0.0 chuyển trạng thái từ 0 lên 1 thì Timer được kích chạy ¦ Q0.0 = 1. Khi I0.0 = 0 hoặc Timer chạy đủ thời gian đặt 2s thì Timer dừng hoặc khi I0.1 = 1 thì Timer cũng dừng ¦ Q0.0 = 0.
MW100 lưu giá trị đếm của Timer theo dạng Integer. MW102 lưu gía trị đếm của Timer theo dạng BCD. Chức năng của Timer này là tạo xung có thời gian được đặt sẵn.
Lệnh S_PEXT: Timer có kích thước lớn, khi có tín hiệu cạnh lên ở I0.0 thì Timer T5 chạy ¦ Q0.0 = 1. Nếu đủ thời gian đặt hoặc khi có tín hiệu I0.1 lên 1 thì Timer dừng ¦ Q0.0 = 0. Trong quá trình Timer chạy nếu có tín hiệu mới từ chân I0.0 thì thời gian Timer lại được tính lại từ đầu. Cá ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & dạng BCD.
Lệnh S_ODTS: Timer kích có nhớ, khi có xung cạnh lên ở I0.0 thì Timer bắt đầu chạy ¦ Q0.0 = 1. Khi Timer ngưng và chỉ tắt khi có tín hiệu Reset ( I0.1). Trong quá trình chạy nếu có sự chuyển đổi tín hiệu từ chân I0.0 thêm 1 lần nữa thì Timer sẽ nhớ và tiếp tục chạy khi hết thời gian lần trước. Các ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & dạng BCD.
Khi I0.0 ON, Timer T5 sẽ được kích hoạt. Đủ thời gian cài đặt là 2S thì bit T5 tác động làm cho QA. 0 ON khi ngõ vào I0.1 tác động thì Timer được Reset. Giá trị hiện tại của Timer cũng như bit T5 sẽ được Reset về 0.
Lệnh S_CUD ( Up-Down Counter): ngõ vào I0.2 = 1 đưa giá trị đếm vào PV. Khi I0.0 chuyển trạng thái từ 0 lên 1, C0 đếm tăng lên 1. Khi I0.1 chuyển trạng thái từ 0 đến 1, C0 đếm giảm xuống 1. Khi cả hai I0.0 và I0.1 đều chuyển trạng thái thì C0 không thay đổi. khi I0.3 = 1 thì C0 bị Reset về 0. Các ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & theo dạng BCD.
Lệnh S_CU ( Up Counter): ngõ vào I0.1 = 1 đưa giá trị đếm vào PV. Khi I0.0 chuyển trạng thái từ 0 lên 1, C0 đếm tăng lên 1. Khi I0.2 = 1 thi C0 bị Reset về 0. Các ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & dạng BCD.
Lệnh S_CD ( Down Counter): ngõ vào I0.1 = 1 đưa giá trị đếm vào PV. Khi I0.0 chuyển trạng thái từ 1 xuống 0, C0 giảm đi 1. Khi I0.2 = 1 thì C0 bị Reset về 0. Các ô nhớ MW100 và MW102 lưu giá trị hiện thời của Timer theo dạng Integer & dạng BCD.
CHƯƠNG 6: TÌM HIỂU VỀ KHÍ NÉN
6.1 Khả năng ứng dụng của khí nén
6.1.1 Trong lĩnh vực điều khiển
Vào những thập niên 50 và 60 của thế kỷ 20, là thời gian phát triển mạnh mẽ của giai đoạn tự động hóa quá trình sản xuất, kỹ thuật điều khiển bằng khí nén được phát triển rộng rãi và đa dạng trong nhiều lĩnh vực khác nhau.
Hệ thống điều khiển bằng khí nén được sử dụng trong các lĩnh vực như: các thiết bị phun sơn, các loại đồ gá kẹp chi tiết… Ngoài ra hệ thống điều khiển bằng khí nén được sử dụng trong các dây chuyền rửa tự động, trong các thiết bị vận chuyển và kiểm tra của thiết bị lò hơi, thiết bị mạ điện, đóng gói, bao bì và trong công nghiệp hóa chất.
6.1.2 Trong hệ thống truyền động
Các dụng cụ, thiết bị máy va đập: các thiết bị, máy móc trong lĩnh vực khai thác đá, khai thác than, trong các công trình xây dựng (xây dựng hầm mỏ, đường hầm…).
Truyền động thẳng: Vận dụng truyền động bằng áp suất khí nén cho chuyển động thẳng trong các dụng cụ, đồ gá kẹp chặt chi tiết, trong các thiết bị đóng gói, trong các loại máy gia công gỗ, trong các thiết bị làm lạnh cũng như trong hệ thống phanh hãm của ô tô…
Truyền động quay: Truyền động xylanh, động cơ quay với công suất lớn bằng năng lượng khí nén.
Trong các hệ thống đo và kiểm tra: Được dùng trong các thiết bị đo và kiểm tra chất lượng sản phẩm.
6.2 Những ưu điểm và nhược điểm của hệ thống truyền động bằng khí nén
6.2.1 Ưu điểm
Có khả năng truyền năng lượng đi xa, bởi vì độ nhớt động học của khí nén nhỏ và tổn thất áp suất trên đường dẫn nhỏ.
Do có khả năng chịu nén (đàn hồi) lớn của không khí, nên có thể tích chứa khí nén rất thuận lợi. Vì vậy có khả năng ứng dụng để thành lập một trạm tích chứa khí nén.
Không khí dùng để nén, hầu như có số lượng không giới hạn và có thể thải ra ngược trở lại bầu khí quyển.
Hệ thống khí nén sạch sẽ, dù cho có sự rò rỉ không khí nén ở hệ thống ống dẫn, do đó không tồn tại mối đe dọa bị nhiễm bẩn.
Chi phí nhỏ để thiết lập một hệ thống truyền động bằng khí nén, bởi vì phần lớn trong các xí nghiệp, nhà máy đã có sẵn đường dẫn khí nén.
Hệ thống phòng ngừa quá áp suất giới hạn được bảo đảm, nên tính nguy hiểm của quá trình sử dụng hệ thống truyền động bằng khí nén thấp.
Các thành phần vận hành trong hệ thống (cơ cấu dẫn động, van,...) có cấu tạo đơn giản và giá thành không đắt.
Các van khí nén phù hợp một cách lý tưởng đối với các chức năng vận hành logic, và do đó được sử dụng để điều khiển trình tự phức tạp.
6.2.2 Nhược điểm
Lực để truyền tải trọng đến cơ cấu chấp hành thấp.
Khi tải trọng trong hệ thống thay đổi, thì vận tốc truyền cũng thay đổi theo, bởi vì khả năng đàn hồi của khí nén lớn. (Không thể thực hiện được những chuyển động thẳng đều hay quay đều).
Dòng khí thoát ra ở đường dẫn gây nên tiếng ồn.
6.3 Nguyên lý truyền động
Hình 6.1: Sơ đồ nguyên lý của mạch điều khiển và các phần tử
6.4 Đơn vị đo và các đại lượng cơ bản
6.4.1 Áp suất
Đơn vị đo cơ bản của áp suất theo hệ đo lường SI là pascal.
Một pascal là áp suất phân bố đều lên bề mặt có có diện tích 1m2 với lực tác dụng vuông góc lên bề mặt đó là 1N.
1 Pa = 1 N/m2
1 Pa = 1 Kgm/s2/m2 = 1 Kg/ms2
1 Pa = 10-6 Mpa
Ngoài ra còn dùng đơn vị bar.
1 bar = 105 Pa
6.4.2 Lực
Đơn vị của lực là Newton (N).
Một Newton là lực tác dụng lên đối trọng có khối lượng 1 Kg với gia tốc 1 m/s2.
1N = 1 Kg.m/s2
6.4.3 Công suất
Đơn vị của công suất là watt.
Một watt là công suất trong thời gian 1 giây sinh ra năng lượng 1 Joule.
1 W = 1 Nm/s
6.5 Cơ cấu chấp hành
Cơ cấu chấp hành có nhiệm vụ biến đổi năng lượng khí nén thành năng lượng cơ học.
Cơ cấu chấp hành có thể thực hiện chuyển động thẳng (xilanh) hoặc chuyển động quay (động cơ khí nén).
Ở trạng thái làm việc ổn định, thì khả năng truyền năng lượng có phương pháp tính toán giống thủy lực.
Ví dụ:
Công suất:
N = p.Q (khí nén)
Vận tốc:
(Cơ cấu chấp hành)
Cụ thể:
6.5.1 Xy lanh
+ Xy lanh tác dụng đơn (tác dụng một chiều).
+ Xy lanh tác dụng kép (tác dụng hai chiều).+ Xy lanh tác dụng hai chiều có cơ cấu giảm chấn không điều chỉnh được.
+ Xy lanh tác dụng hai chiều có cơ cấu giảm chấn điều chỉnh được.
+ Xy lanh quay bằng thanh răng.
6.5.1.1 Xy lanh tác dụng đơn
Áp lực tác dụng vào xilanh đơn chỉ ở một phía, phía ngược lại là do lò xo tác động hoặc là ngoại lực tác động.
Ký hiệu
Hình 6.2: Xy lanh tác dụng đơn
6.5.1.2 Xy lanh màng
Xy lanh màng hoạt động như xilanh tác dụng đơn.
Xy lanh màng có hành trình dịch chuyển lớn nhất (hmã=80) nên được dùng trong điều khiển, ví dụ trong công nghiệp ôtô (điều khiển thắng, li hợp…), trong công nghiệp hóa chất (đóng mở van).
Chú ý: xy lanh màng chỉ được sử dụng trong điều khiển khí nén
Hình 6.3: Xy lanh màng
6.5.1.3 Xy lanh tác dụng kép
Áp lực tác động vào xy lanh kép theo hai phía
Hinh 6.4: Xy lanh tác dụng kép
6.5.2 Van
6.5.2.1 Van đảo chiều
Van đảo chiều có nhiệm vụ điều khiển dòng năng lượng bằng cách đóng mở, hay chuyển đổi vị trí, để thay đổi hướng của dòng năng lượng.
- Nguyên lý hoạt động của van đảo chiều
Hình 6.5: nguyên lý hoạt động van đảo chiều
Khi chưa có tín hiệu tác động vào cửa (12), thì cửa (1) bị chặn và cửa (2) nối với cửa (3).
Khi có tín hiệu tác động vào cửa (12) (khí nén), lúc này nòng van sẽ dịch chuyển về phía bên phải, cửa (1) nối với cửa (2) và cửa (3) bị chặn.
Trường hợp tín hiệu tác động vào cửa (12) mất đi, dưới tác dụng của lực lò xo, nòng van trở về vị trí ban đầu.
- Ký hiệu van đảo chiều
Chuyển đổi vị trí của nòng van được biểu diễn bằng các ô vuông liền nhau với các chữ cái a, b, c… hay các số 0, 1, 2…
Vị trí “0” được ký hiệu là vị trí, mà khi van chưa có tác động của tín hiệu ngoài vào.
Đối với van có 3 vị trí, thì vị trí giữa là vị trí “0”, còn đối với van 2 có vị trí, thì vị trí “0” có thể là a hoặc b, thường vị trí b là vị trí “0”.
Cửa nối với van được ký hiệu như sau:
Theo t/c ISO5592 Theo t/c ISO1219
Cửa nối với nguồn khí 1 P
Cửa nối làm việc 2, 4, 6… A, B, C…
Cửa xả khí 3, 5, 7… R, S, T…
Cửa nối với tín hiệu điều khiển 12, 14… X, Y…
Bên trong ô của mỗi vị trí là các đường thẳng có đường mũi tên, biểu diễn hướng chuyển động của dòng khí qua van. Trường hợp dòng khí bị chặn, được biểu diễn bằng dấu gạch ngang.
Hình 6.6: Ký hiệu các cửa của van đảo chiều.
Một số van đảo chiều thường gặp:
+ Van đảo chiều 2/2
+Van đảo chiều 3/2
+ Van đảo chiều 4/2
+ Van đảo chiều 5/2
+ Van đảo chiều 4/3
6.5.2.1.1 Van đảo chiều có vị trí “0”
Van đảo chiều có vị trí ”0” là loại van có tác động bằng cơ – lò xo lên nòng van.
- Van đảo chiều 2/2
Tín hiệu tác động bằng cơ – đầu dò. Van có hai cửa P và R, hai vị trí “0” và “1”. Vị trí “0” cửa P và R bị chặn.
Hình 6.7: Van đảo chiều 2/2
Nếu đầu dò tác động vào, từ vị trí “0” van sẽ được chuyển sang vị trí “1”, như vậy cửa P và R sẽ nối với nhau. Khi đầu dò không tác động nữa, thì van sẽ quay trở về vị trí ban đầu bằng lực ép lò xo.
- Van đảo chiều 3/2
Tín hiệu tác động bằng cơ – đầu dò. Van có 3 cửa P, A và R, có hai vị trí “0” và “1”. Vị trí “0” cửa P bị chặn.
Cửa A nối với cửa R, nếu đầu dò tác động vào, từ vị trí “0” van sẽ được chuyển sang vị trí “1”, như vậy cửa P và cửa A sẽ nối với nhau, cửa R bị chặn. Khi đầu dò không tác động nữa, thì van sẽ quay về vị trí ban đầu bằng lực nén lò xo.
Ký hiệu
Hình 6.8: Cấu tạo van đảo chiều 3/2
+ Tín hiệu tác động bằng tay – nút ấn
Ký hiệu
+ Tín hiệu tác động bằng nam trâm điện qua van phụ trợ
Ký hiệu
Tại vị trí “0” cửa P bị chặn, của A nối với cửa R. Khi dòng điện vào cuộn dây, pittong trụ bị kéo lên, khí nén sẽ theo hướng P1, 12 tác động lên pittong phụ, pittong phụ bị đẩy xuống, van sẽ chuyển sang vị trí “1”, lúc này cửa P nối với cửa A, cửa R bị chặn.
Khi dòng điện mất đi, pittong trụ bị lò xo kéo xuống và khí nén ở phần trên pittong phụ sẽ theo cửa Z thoát ra ngoài.
- Van đảo chiều 4/2
+ Tín hiệu tác động bằng tay – bàn đạp.
Ký hiệu
+ Tín hiệu tác động trực tiếp bằng nam châm điện
Ký hiệu
Tại vị trí “0” cửa P nối với cửa B, cửa A nối với R. Khi có dòng điện vào cuộn dây, Van sẽ chuyển sang vị trí “1”, lúc này cửa P nối với cửa A, cửa B nối với cửa R.
- Van đảo chiều 5/2
+ Tín hiệu tác động bằng cơ – đầu dò.
Ký hiệu
Tại vị trí “0” cửa P nối với cửa B, cửa A cửa R và cửa S bị chặn. Khi đầu dò tác động, van sẽ chuyển sang vị trí “1”, lúc này cửa P nối với cửa A, cửa B nối với cửa S và cửa R bị chặn.
+ Tín hiệu tác động bằng khí nén.
Ký hiệu
Tại vị trí “0” cửa P nối với cửa A, cửa P nối với R và cửa S bị chặn. Khi dòng khí nén Z tác động vào, van sẽ chuyển sang vị trí “1”, lúc này cửa P nối với cửa B, cửa A nối với cửa S và cửa R bị chặn.
6.5.2.1.2 Van đảo chiều không có vị trí “0”
Van đảo chiều không có vị trí “0” là van mà sau khi tín hiệu tác động lần cuối lên nòng van không còn nữa, thì van sẽ giữ nguyên vị trí lần đó, chừng nào chưa có tác động lên phía đối diện nòng van. Ký hiệu vị trí tác động là a, b, c…
Tín hiệu tác động lên nòng van có thể là:
+ Tác động bằng tay, bàn đạp.
+ Tín hiệu tác động bằng dòng khí nén điều khiển đi vào hay đi ra từ hai phía của nòng van.
+ Tín hiệu tác động trực tiếp bằng điện từ hay gián tiếp bằng dòng khí nén đi qua van phụ trợ. Loại van này được gọi là van đảo chiều xung, vì vị trí của van được thay đổi khi có tín hiệu xung tác động lên nòng van.
- Van đảo chiều 3/2
Tín hiệu tác động bằng tay, được ký hiệu:
Khi ở vị trí a, cửa P nối với cửa A và cửa R bị chặn. Vị trí b, cửa A nối với cửa R và cửa B bị chặn.
- Van đảo chiều 4/3
Tín hiệu tác động bằng tay, được ký hiệu:
Nếu vị trí xoay chiều nằm tại vị trí a, thì cửa P nối với cửa A và cửa B nối với cửa R. Vị trí xoay chiều nằm tại vị trí b, thì các cửa nối A, B, P, R đều bị chặn. Vị trí xoay chiều nằm tại vị trí c, thì cửa P nối với cửa B và cửa A nối với cửa R.
- Van đảo chiều 4/2
Tín hiệu tác động bằng dòng khí nén điều khiển đi ra từ hai phía nòng van.
Ký hiệu
Khi cửa xả X, nòng van sẽ dịch chuyển sang vị trí b, cửa P nối với cửa A và cửa B nói với cửa R.
Khi cửa X ngừng xả khí, thì vị trí của nòng van vẩn nằm ở vị trí b cho đến khi có tín hiệu xả khí ở cửa Y.
6.5.2.2 Van chặn
Van chặn là loại van chỉ cho lưu lượng khí đi qua một chiều, chiều ngược lại bị chặn.
Van chặn gồm các loại sau:
+ Van một chiều
+ Van logic OR
+ Van logic AND
+ Van xả khí nhanh
6.5.2.3 Van một chiều
Van một chiều có tác dụng chỉ cho lưu lượng khí đi qua một chiều.
Ký hiệu
6.5.2.4 Van logic OR
Van logic OR có chức năng là nhận tín hiệu điều khiển ở những vị trí khác nhau trong hệ thống điều khiển.
Ký hiệu
Khi có dòng khí nén qua cửa P1, sẽ đẩy pittong trụ của van sang phải, chắn cửa P2 - P1 nối với của A và ngược lại.
6.5.2.5 Van logic AND
Van logic AND có chức năng là nhận tín hiệu điều khiển cùng một lúc ở những vị trí khác nhau trong hệ thống điều khiển.
Ký hiệu
Khi dòng khí nén qua P1 P1 bị chặn. Ngược lại dòng khí qua P2 P2 bị chặn.
Nếu dòng khí đồng thời qua P1, P2 cửa A sẽ nhận được tín hiệu khí qua cửa A.
6.5.2.6 Van xả khí nhanh
Van xả khí nhanh thường lắp ở vị trí gần cơ cấu chấp hành (pittong), có nhiệm vụ xả khí nhanh ra ngoài.
Ký hiệu
6.5.2.7 Van tiết lưu
Van tiết lưu dùng để điều chỉnh lưu lượng dòng khí.
- Van tiết lưu có tiết diện không thay đổi
Ký hiệu:
- Van tiết lưu có tiết diện thay đổi
Ký hiệu
- Van tiết lưu một chiều
Ký hiệu
6.5.2.8 Van điều chỉnh thời gian
- Rơle thời gian đóng chậm
Ký hiệu
Hình 6.9: Rơle thời gian đóng chậm
Khí nén qua van một chiều, cần thời gian t1 để làm đầy bình chứa, sau đó tác động lên nòng van đảo chiều, van đảo chiều chuyển đổi vị trí, cửa P nối với cửa A.
- Rơle thời gian ngắt chậm
Ký hiệu
Hình 6.10: Rơle thời gian ngắt chậm
Rơle thời gian ngắt chậm, nguyên lý, cấu tạo cũng tương tự như rơle thời gian đóng chậm, nhưng van tiết lưu một chiều có chiều ngược lại.
6.5.2.9 Van chân không
Van chân không là cơ cấu có nhiệm vụ hút và giữ chi tiết bằng lực chân không, chân không được tạo ra bằng bơm chân không hay bằng nguyên lý ống venturi.
Ký hiệu
Ta có lực hút chân không:
F=.P (P= Pa – Pu)
Trong đó:
F- Là lực hút chân không (N).
D- Là đường kính đĩa hút (m).
Pa- Là áp suất không khí ở điều kiện tiêu chuẩn (N/m2)
Pu- Là áp suất chân không tại cửa U (N/m2)
Lực F phụ thuộc vào D và Pu.
6.5.2.10 Van loc khí
Làm sạch các chất bẩn và ngưng tụ hơi nước chứa trong nó. Khí nén sẽ tạo chuyển động xoắn khi qua lá xoắn kim loại, sau đó qua phần tử lọc, các chất bẩn được tách ra và bám vào màng lọc, cùng với những phần tử nước được để lại mằm ở đáy của bầu lọc. Tùy theo yêu cầu chất lượng của khí nén mà chọn phần tử lọc. Độ lớn của phần tử lọc nên chọn từ 20µm - 50 µm.
Hình 6.11:Van lọc khí nén
ĐỒ ÁN TỐT NGHIỆP ĐIỆN CƠ CẤU CHẤP HÀNH PLC MÔ HÌNH LƯU KHO, ĐỒ ÁN TỐT NGHIỆP, CƠ CẤU CHẤP HÀNH PLC, MÔ HÌNH LƯU KHO











