ĐỒ ÁN TỐT NGHIỆP ĐIỆN tử Thiết kế và chế tạo mô hình bảo vệ cửa ra vào cơ quan
NỘI DUNG ĐỒ ÁN
100 MB Bao gồm tất cả file,.lưu đồ giải thuật... thuyết minh Thiết kế và chế tạo mô hình bảo vệ cửa ra vào cơ quan, bản vẽ nguyên lý, bản vẽ thiết kế, FILE lập trình, ĐỒ ÁN TỐT NGHIỆP ĐIỆN tử Thiết kế và chế tạo mô hình bảo vệ cửa ra vào cơ quan
MỤC LỤC
LỜI MỞ ĐẦU. 2
CHƯƠNG 1 : THÔNG SỐ KĨ THUẬT CỦA CỬA TỰ ĐỘNG 3
1.1.Thông số kĩ thuật của cửa tự động. 3
1.2.Nguyên lý làm việc. 3
1.3.Tính toán công suất và chọn động cơ. 4
1.4.Tính tỉ số truyền cho toàn bộ hệ thống. 5
CHƯƠNG 2 : CÁC PHƯƠNG ÁN THIẾT KẾ CƠ CẤU DẪN ĐỘNG 6
2.1 Bộ truyền xích. 6
2.1.1 Bộ truyền xích con lăn. 6
2.1.2 Bộ truyền xích ống. 6
2.1.3 Bộ truyền xích răng. 7
2.2 Bộ truyền đai 7
2.3 Bộ truyền tang cuốn ma sát và cáp. 8
CHƯƠNG 3 : TÍNH TOÁN THIẾT KẾ BỘ TRUYỀN DẪN ĐỘNG 10
3.1 Phân phối tỉ số truyền. 11
3.2 Bộ truyền tang ma sát và cáp. 11
3.2.1 Cáp thép. 11
3.2.2 Tang ma sát 12
3.2.3 Puly. 14
3.3 Thiết kế hộp giảm tốc. 15
3.3.1 Thiết kế hộp giảm tốc cấp nhanh. 15
3.3.2 Xác định chính xác hệ số tải trọng K.. 16
3.3.3 Xác định môđun ,số răng và chiều rộng bánh răng. 16
3.3.4 Các thông số của bộ truyền. 17
3.4 Thiết kế bộ truyền bánh răng cấp chậm.. 17
3.4.1 Chọn vật liệu chế tạo bánh răng. 17
3.4.2 Định ứng suất cho phép. 18
3.4.2 Xác định chính xác hệ số tải trọng K.. 19
3.4.3 Xác định môđun ,số răng và chiều rộng bánh răng. 19
3.4.4 Các thông số của bộ truyền. 19
3.5 Thiết kế gối đỡ. 21
3.6 Tính chọn then. 21
3.7 Thiết kế khớp nối trục. 21
3.7.1 Khớp nối 21
3.7.2 Ly hợp. 22
CHƯƠNG 4: THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN.. 23
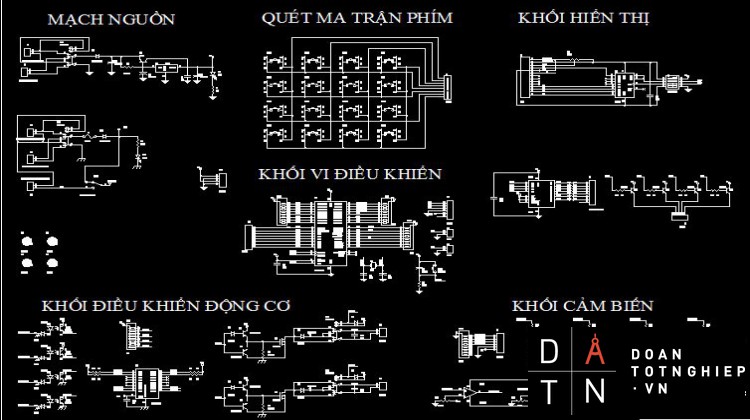
4.1.Sơ đồ khối mạch điều khiển. 23
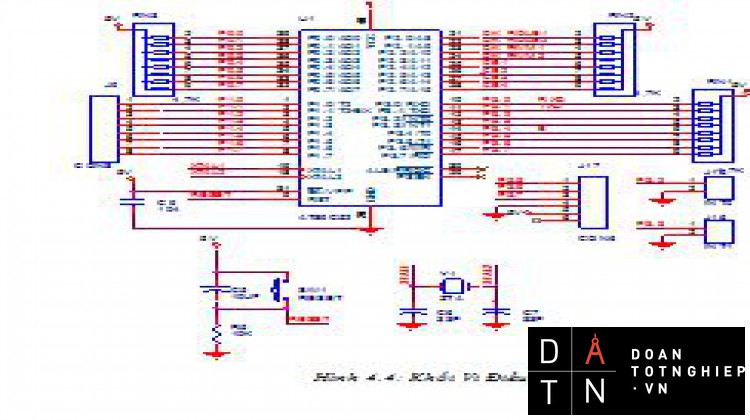
4.2.Sơ đồ nguyên lý. 24
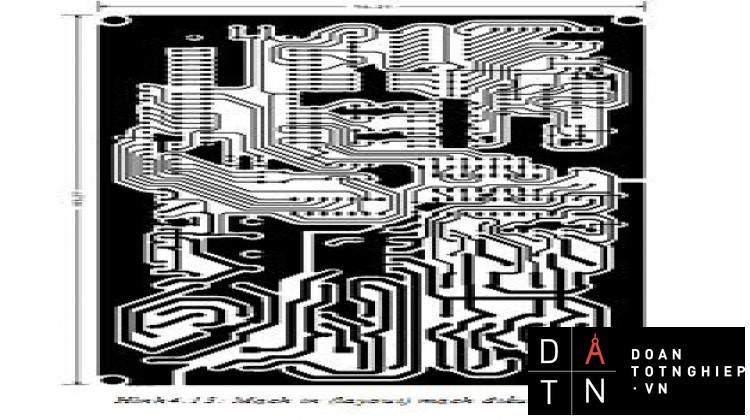
4.3.Tiến hành làm mạch điều khiển. 32
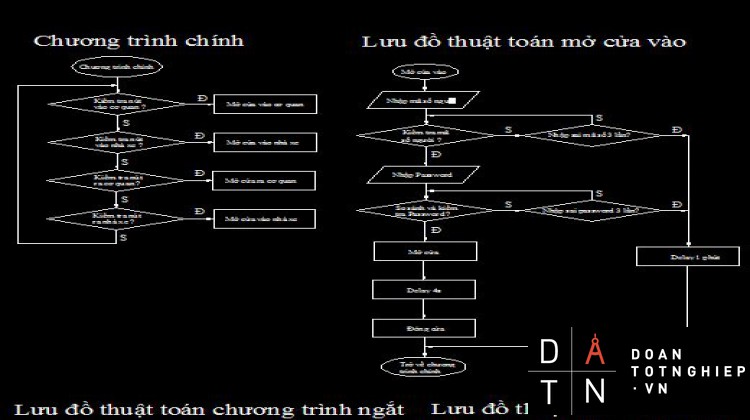
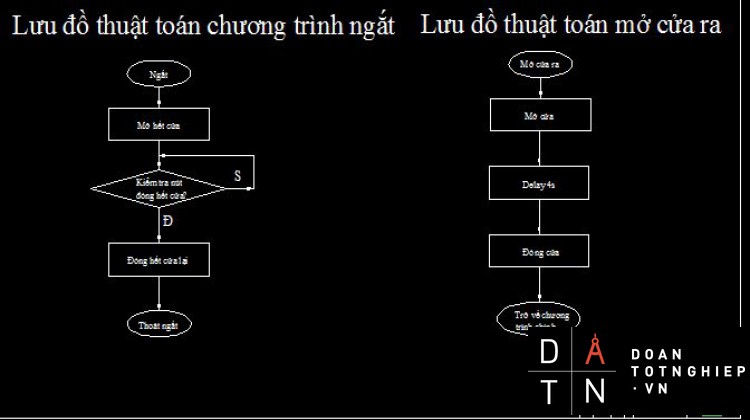
4.4.Lưu đồ thuật toán. 35
4.5.Chương trình điều khiển. 38
LỜI MỞ ĐẦU
Với đồ án môn học: “Hệ Thống Cơ Điện Tử”, nhóm chúng em đã chọn đề tài là: “Thiết kế và chế tạo mô hình bảo vệ cửa ra vào cơ quan”.Ngày nay khi mà nền kinh tế phát triển, lực lượng lao động ở các cơ quan, công ty, xí nghiệp tăng lên làm cho việc quản lý nhân sự, số lượng người ra vào trở nên phức tạp hơn. Với đề tài này có thể giúp quản lý được số lượng người ra vào trong công ty.
Với sự hướng dẫn và giúp đỡ nhiệt tình của thầy TRẦN NGỌC HẢI chúng em đã hoàn thành đề tài trong thời gian quy định.Với đề tài này chúng em đã chế tạo được mô hình đáp ưnứg được một số yêu cầu cơ bản như:
+ có cảm biến phát hiện người vào cửa
+ Có cảm biến nhận biết khi có người đứng giữa cửa.
+ Khi có sự cố khẩn cấp như cháy nỗ,… thì chỉ cần người điều hành nhấn nút báo động thì tất cả cửa sẽ mở ra hết.
Tuy nhiên do thời gian và kiến thức còn hạn chế nên vẫn còn nhiều sai sót. Mong các thầy chỉ dẫn thêm.
CHƯƠNG 1 : THÔNG SỐ KĨ THUẬT CỦA CỬA TỰ ĐỘNG ĐÓNG MỞ HAI CÁNH
1.1.Thông số kĩ thuật của cửa tự động :
Chiều rộng hành lang :4m
Hai cánh cố định :
+ Chiều rộng mỗi cánh : 1.2 m
+ Chiều cao mỗi cánh : 2.5 m
+ Bề dày của cánh cửa : 10 mm
Hai cánh cửa di động :
+ Chiều dài đống mở của cửa : 1 m
+ Chiều rộng mỗi cánh cửa : 1.2 m
+ Chiều cao mỗi cánh : 2.5 m
+ Bề dày của cửa : 10 mm
Ở phần dưới và trên của cử di động được gắn bánh dẫn giúp cho việc chuyển động dễ dàng hơn.
Vật liệu làm cửa là bằng gương màu, cứng có chiều dày 10 mm
Toàn bộ cửa được bọc khung bằng nhôm
Khối lượng của mỗi cánh cửa di động : 100 kg
1.2.Nguyên lý làm việc :
Khi có người muốn vào cơ quan thì nhấn nút để yêu cầu vào.Lúc này trên màn hình LCD sẽ hiển thị để hướng dẫn nhập mã số nhân viên và mật mã cá nhân.Nếu mã số nhân viên và mật mã cá nhân nhập vào đúng thì cửa sẽ được mở ra. Kể từ lúc cửa được mở ra hoàn toàn thì bộ định thời sẽ bắt đầu đếm và sau khoảng thời gian đã được cài đặt là 4 giây để đảm bảo là người đã vào cửa thì cửa sẽ tự động đóng lại.Trong quá trình cửa đóng lại nếu có người hoặc vật cản ở giữa cửa thì cảm biến sẽ phát hiện và cho dừng quá trình đóng cửa.Khi nào không còn người hoặc vật cản ở giữa cửa nữa thì cửa sẽ tiếp tục đóng lại.
Khi ra thì chỉ cần nhấn nút yêu cầu ra là cửa sẽ mở ra và sau đó một khoảng thời gian 4 giây khi đảm bảo người đã ra thì cửa tự động đóng lại.
Trong trường hợp khẩn cấp ví dụ như cháy nổ thì chỉ cần nhấn một nút báo động thì lập tức các cửa đều mở ra và bật còi báo động. Sau khi hết sự cố thì người điều hành sẽ nhấn nút để đóng lại hết tất cả các cửa quá trình hoạt động lại bình thường.
1.3.Tính toán công suất và chọn động cơ :
Khối lượng của mỗi cánh cửa di động : 100 kg
Trọng lượng của mỗi cánh cửa : 100 x 10 = 1000 N
Phản lực tác dụng lên các ray dẫn : R = 1000 N
Hệ số ma sát giữa bánh dẫn và thanh ray : f = 0.2
Hiệu suất của bộ truyền động tang cuốn cáp : η1
Hiệu suất của khớp nối : η2
Hiệu suất các bộ truyền : η = η1 x η2 = 0.98 x0.98 = 0.9604
Công suất làm việc : N = 2 x F x V
Trong đó : F = R x f = 1000 x 0.2 = 200 N
V = 1 m/s
Suy ra ta có : n = 2x 200 x 2 = 400 W
Công suất trên đầu ra trục động cơ : Nt = = = 0.416 KW
Chọn loại động cơ có sẵn hộp giảm tốc có công suất trục ra > 0.416 KW
Tra bảng TK2CTM ta chọn gần đúng với công suất yêu cầu : Động cơ không đồng bộ : AOC2-21-6
Công suất định mức trên trục ra : 0.8 KW
Tốc độ trên trục ra : ndc = 870 (vòng /phút )
Hiệu suất : H = 70 %
Momen xoắn trên trục ra :
Mx = = = 138475 ( N.m)
Khối lượng động cơ : 16.5 kg
1.4.Tính tỉ số truyền cho toàn bộ hệ thống :
Số vòng quay trên tang:
n = = = 2 (v/s)
n = 2 x 60 = 120 (v/p)
Tỉ số truyền của hệ thống:
i = = = 7.25
Đường kính của trục động cơ:
D = C
Trong đó:
C: hệ số tính toán phụ thuộc ứng suất xoắn cho phép đối với trục vào ( C = 110- 120 ).Ta chọn C=120
Nên D= c. = 12 mm
Ta chọn D = 15 mm
CHƯƠNG 2 : CÁC PHƯƠNG ÁN THIẾT KẾ CƠ CẤU DẪN ĐỘNG
2.1 Bộ truyền xích:
2.1.1 Bộ truyền xích con lăn:
- Cấu tạo xích con lăn: Cấu tạo gồm má trong 1 xen kẽ với má ngoài 2 có thể xoay tương đối với nhau. Các má trong 2 lắp chặt với ống 3,các má ngoài lắp chặt với ống 4.Ống và chốt có khe hở để có thể xoay tự do đối với nhau tạo thành bản lề. Nhằm mục đích giảm mòn răng đĩa xích phía ngoài ống có lắp con lăn 5 và cũng có thể xoay tự do. Để có thể xoay tự do và nối hai mắt cuối lại với nhau người ta dùng chốt chẻ.
- Cấu tạo đĩa xích: Đĩa xích có cấu tạo giống hình dáng bánh răng. Hình dạng và kích thước Profin răng được qui định theo tiêu chuẩn.
Đĩa xich nhỏ được chế tạo theo phương pháp dập,đĩa xích trung bình và lớn được chế tạo riêng Mayơ và vành răng rồi ghép với nhau bằng phương pháp hàn hay bulông.
- Ưu điểm:
+ Khả năng chịu tải trọng lớn hơn so với các bộ truyền khác.
+ Tỉ số truyền ổn định
+ Tuổi thọ cao
+ Khoảng cách truyền động xa
+ Dễ dàng sửa chữa và thay thế
- Nhược điểm:
+ Khi tải trọng lớn và tốc độ cao dễ gây ra va đập mạnh tạo tiếng ồn
+ Nặng nề ,cồng kềnh
2.1.2 Bộ truyền xích ống :
- Cấu tạo giống xích con lăn nhưng không có con lăn .Giá thành chế tạo rẽ hơn, khối lượng nhỏ hơn .
- Ưu điểm :
+ Giá thành thấp
+ Khối lượng nhỏ,dùng trong cơ cấu tải trọng thấp
- Nhược điểm :
+ Chóng mòn tải trọng thấp
+ Làm việc không ổn định
+ Tuổi thọ không cao
2.1.3 Bộ truyền xích răng :
-Ưu điểm :
+ Có khả năng làm việc với tải trọng lớn
+ Làm việc êm, ít tiếng ồn
- Nhược điểm:
+ Giá thành cao ,khối lượng nặng nề
+ Chế tạo phức tạp
2.2 Bộ truyền đai :
- Bộ truyền đai đơn giản gồm bánh đai chủ động và bánh đai bị động và dây đai mắc qua hai bánh đai với lực căng ban đầu F0 .Lực căng này tạo ra ma sát giữa đai và bánh đai.Nhờ có ma sát này chuyển động quay chuyển động tịnh tiến và tải trọng được truyền đi.
Các loại đai:
- Hình dạng và kết cấu của các loại đai:
a/ Đai dẹt: Đai da, đai vải, đai sợi bông, đai len và đai sợi tổng hợp.Đai da có tuổi thọ cao, khả năng tải tốt nhưng rất đắt nên ít dùng.
b/ Đai hình thang: Mặt làm việc của đai là hai mặt bên tiếp xúc với rãnh hình thang tương ứng trên bánh đai. Đai hình thang gồm có đai sợi bện và đai sợi xếp.
- Ưu điểm :
+ Làm việc êm
+ Có khả năng làm việc ở tốc độ cao
- Nhược điểm:
+ Khả năng chịu tải trọng thấp
+ Tuổi thọ không cao
+ Khoảng cách truyền động ngắn
2.3 Bộ truyền tang cuốn ma sát và cáp:
Cấu tạo của bộ truyền gồm có một tang ma sát chủ động được nối với động cơ, puly bị động và cáp mắc qua tang và puly. Cáp được quấn trên tang để tăng lực ma sát tạo ra khả năng kéo của tang, số vòng cáp cuốn trên tang tùy thuộc vào tải trọng, vật liệu làm cáp, tang và kết cấu của tang.
Tang ma sát gồm tang hình trụ và tang có đường kính thay đổi
-Ưu điểm :
+ Khả năng tải khá tốt
+ Làm việc ở tốc độ cao
+ Tuổi thọ cao
+ Giá thành không cao lắm
+ Khối lượng nhẹ và gọn gàng
+ Chế tạo đơn giản
+ Dễ lắp ráp, thay thế
+ Khả năng truyền động lớn đây là một trong những ưu điểm quan trọng
+ Làm việc êm, ít tiếng ồn
+ Hệ số ổn định cao
- Nhược điểm :
+ Tạo lực căng ban đầu cho cáp
+ Khả năng tải còn hạn chế
Sau khi phân tích các bộ truyền động khác nhau đối chiếu yêu cầu thiết kế :
+ Tải trọng không lớn lắm
+ Làm việc ở tốc độ cao
+ Đòi hỏi sự êm ả, ít gây tiếng động
+ Khoảng cách làm việc lớn
+ Hệ số ổn định cao
+ Giá thành càng thấp càng tốt
+ Dễ sửa chữa thay thế
+ Tuổi thọ cao
Ta chọn bộ truyền tang ma sát và cáp làm bộ truyền dẫn động cho cửa để thiết kế.
CHƯƠNG 3 : TÍNH TOÁN THIẾT KẾ BỘ TRUYỀN DẪN ĐỘNG
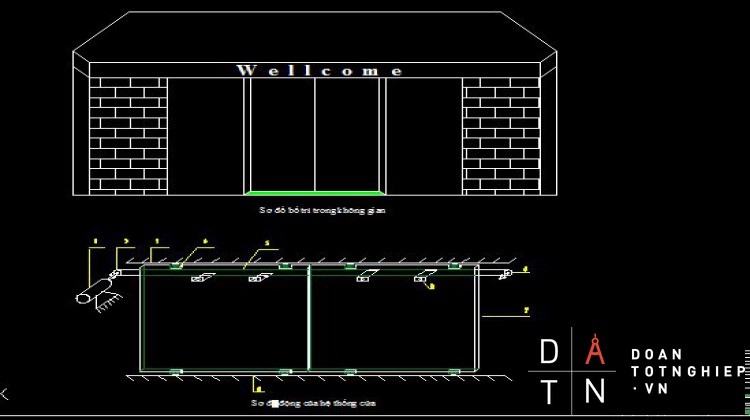
Sơ đồ nguyên lý :
1: Động cơ dẫn động cho tang
2: Tang ma sát
3: Ray trượt trên
4: Bánh xe lăn
5: Cáp
6:Puly bị động
7:Cử di động
8: Ray trượt dưới
9: Cảm biến
10 :Cần nối cửa và cáp
3.1 Phân phối tỉ số truyền :
|
|
Trục động cơ |
I |
II |
III |
|
Trục i |
idc = 1 |
2.5 |
2.9 |
1 |
|
n (v/ph) |
870 |
348 |
120 |
120 |
|
N (KW) |
0.416 |
0.39 |
0.37 |
0.36 |
3.2 Bộ truyền tang ma sát và cáp :
3.2.1 Cáp thép :
* Các yêu cầu chung đối với cáp :
- An toàn trong sử dụng
- Độ mềm cao,độ uốn cong bảo đảm sự nhỏ gọn trong cơ cấu của máy
- Bảo đảm độ êm dịu,không gây ồn khi làm việc
- Trọng lượng nhỏ, giá thành thấp
- Đảm bảo độ bền lâu,thời gian sử dụng lớn
*Các loại cáp :
Việc phân loại cáp dựa vào các tiêu chuẩn khác nhau :
- Cách bện cáp : + cáp bện đơn
+ cáp bện kép
+ cáp bện ba
-Chiều bện cáp : + cáp bện xuôi
+ cáp bện ngược
-Kiểu tiếp xúc : + cáp tiếp xúc điểm
+ cáp tiếp xúc đường
* Điều kiện chọn cáp :
Smax .n Sd
Smax : lục căng lớn nhất trong quá trình làm việc
Sd : tải trọng phá hỏng cáp,do nhà sản xuất qui định
n : hệ số an toàn khi sử dụng cáp
Tra theo điều kiện tải trọng và tiêu chuẩn chọn cáp có đượng kính dc = 8 mm
3.2.2 Tang ma sát :
Đặc điểm của tang ma sát là không cố định đầu cáp lên tang mà cuốn lên tang một số vòng,khi tang quay thi nhánh cáp cuốn vào với lực căng Sc = Smax và nhánh kia nhả ra với lực căng Sn = Smin .Tang truyền chuyển động nhờ ma sát giữa cáp và tang .
Tang ma sát gôm tang hình trụ và tang có đường kính thay đổi .
Lực căng cáp lớn nhất : Smax = U + Smin
Số vòng cáp cuốn trên tang được tính từ điều kiện cáp không bị trượt trên tang theo công thức Ơle :
Smax = Smin .
Trong đó f là hệ số ma sát giữa cáp và tang
Suy ra : n =
Lực căng lớn nhất Smax = F = 200 N
Lực căng nhỏ nhất được tính toán theo thực tế : Smin = Ky. q . a
Với g : gia tốc trọng trường 10 m/s2
q : khối lượng trên một mét cáp 0.3 kg
a : khoảng cách giữa tâm tang và puly 4m
Ky : hệ số phụ thuộc cách thức bố trí bộ truyền,với bộ truyền nằm ngang Ky = 60
Nên Smin = 0.3x4x60 = 72 N
Vậy số vòng cáp cuốn lên tang n = 2 vòng
Chiều dài của tang được tính theo công thức : Lt =+ (n + 4)t
Trong đó l: chiều dài vận hành tải trọng 4m
t: bước cáp 12 mm
D: đường kính tang đến tâm cáp 160
4t : số vòng thừ ở hai đầu tang
Nên Lt = + (2+4).12 = 167 mm
Chọn Chiều dài của tang là 180 mm.
3.2.3 Puly :
Puly dùng để đỡ cáp và chuyển hương cáp .
Puly trong cơ cấu làm việc với tải trọng nhẹ và trung bình được đúc bằng gang xám đối với tải trọng nặng thì được đúc bằng thép. Puly có đường kính < 600 mm được đúc liền, puly có đường kính > 600 mm được chế tạo bằng phương pháp hàn.
Đường kính puly đến tâm cáp D phải thỏa mãn để đảm bảo độ lâu bền của cáp
D (e - 1)dc
Chiều sâu của rãnh puly thỏa mãn điều kiện h = (2 – 2,5)dc.
Cáp vòng qua puly phải đảm bảo nằm dọc theo rãnh,độ lệch cho phép( góc nghiêng γ phải thỏa mãn điều kiện sau :
tg γ <
Nếu góc hai thành bên của rãnh 2α = 600 thì góc nghiêng chp phép γ = 60.
3.3 Thiết kế hộp giảm tốc :
3.3.1 Thiết kế hộp giảm tốc cấp nhanh :
Do bộ truyền chịu tải trọng nhỏ đến trung bình nên ta sử dụng vật liệu làm bánh răng độ dẻo hoặc dùng thép tôi cải thiện, thép thường hóa độ rắn bề mặt HB < 350
Bánh răng làm việc răng chịu ứng suất thay đổi chiều nên :
Ta chọn thép có := 520 (N/mm2), = 270
.........................................................
EXIT_QUET_LED:
MOV A,NHO_A
MOV C,NHO_C
MOV TH1,#HIGH(-5000)
MOV TL1,#LOW(-5000)
SETB TR1
RETI
;******** CHUONG TRINH NGAT BAO DONG KHI CO SU CO********* BAO_DONG:
MOV NHO_A6,A
MOV NHO_C6,C
LCALL MO_HET_CUA
JB P3.2,$
LCALL DONG_HET_CUA
MOV A,NHO_A6
MOV C,NHO_C6
RETI
;************ CHUONG RINH CON MO HET CUA ********************
MO_HET_CUA:
CLR DA_MO_CQ
CLR DA_MO_NX
SETB ROLE_CO_QUAN
SETB ROLE_NHA_XE
CLR CUA_CO_QUAN
CLR CUA_NHA_XE
MO1: JB HT_NGOAI_CQ,MO2
JB DA_MO_CQ,MO2
SETB CUA_CO_QUAN
CLR ROLE_CO_QUAN
SETB DA_MO_CQ
MO2: JB HT_NGOAI_NX,MO1
JB DA_MO_NX,KT_MO
SETB CUA_NHA_XE
CLR ROLE_NHA_XE
SETB DA_MO_NX
KT_MO:
JB DA_MO_CQ,MO_XONG
JMP MO1
MO_XONG:
MOV THOI_GIAN_TRE,#5
LCALL DELAY100MS
SETB ROLE_CO_QUAN
SETB ROLE_NHA_XE
RET
;*************** CHUONG TRINH CON DONG HET CUA************
DONG_HET_CUA:
SETB DA_MO_CQ
SETB DA_MO_NX
KT_CO_NGUOI1:
JNB CB_CO_QUAN1,CO_QUAN_CO_NGUOI
JNB CB_CO_QUAN2,CO_QUAN_CO_NGUOI
JNB DA_MO_CQ,KT_CO_NGUOI2
CLR ROLE_CO_QUAN
CLR CUA_CO_QUAN
KT_CO_NGUOI2:
JNB CB_NHA_XE1,NHA_XE_CO_NGUOI
JNB CB_NHA_XE2,NHA_XE_CO_NGUOI
JNB DA_MO_NX,DONG1
CLR ROLE_NHA_XE
CLR CUA_NHA_XE
DONG1:
JB HT_TRONG_CQ,DONG2
JNB DA_MO_CQ,DONG2
SETB CUA_CO_QUAN
SETB ROLE_CO_QUAN
CLR DA_MO_CQ
DONG2:
JB HT_TRONG_NX,KT_CO_NGUOI1
JNB DA_MO_NX,KT_DONG
SETB CUA_NHA_XE
SETB ROLE_NHA_XE
CLR DA_MO_NX
KT_DONG:
JNB DA_MO_CQ,DONG_XONG
LJMP KT_CO_NGUOI1
DONG_XONG:
RET
CO_QUAN_CO_NGUOI:
SETB CUA_CO_QUAN
SETB ROLE_CO_QUAN
LJMP KT_CO_NGUOI2
NHA_XE_CO_NGUOI:
SETB CUA_NHA_XE
SETB ROLE_NHA_XE
LJMP DONG1
;*****************CHUONG TRINH CON DELAY*********************
DELAYUS: DJNZ THOI_GIAN_TRE,$
RET
DELAY1MS:
MOV TH0,#HIGH(-1000)
MOV TL0,#LOW(-1000)
SETB TR0
JNB TF0,$
CLR TR0
CLR TF0
DJNZ THOI_GIAN_TRE,DELAY1MS
MOV THOI_GIAN_TRE,#1
RET
DELAY100MS: MOV 7FH,#2
AGAIN:
MOV TH0,#HIGH(-50000)
MOV TL0,#LOW(-50000)
SETB TR0
JNB TF0,$
CLR TR0
CLR TF0
DJNZ 7FH,AGAIN
DJNZ THOI_GIAN_TRE,DELAY100MS
MOV THOI_GIAN_TRE,#1
RET
DELAY1S: MOV 7FH,#20
AGAIN1:
MOV TH0,#HIGH(-50000)
MOV TL0,#LOW(-50000)
SETB TR0
JNB TF0,$
CLR TR0
CLR TF0
DJNZ 7FH,AGAIN1
DJNZ THOI_GIAN_TRE,DELAY1S
MOV THOI_GIAN_TRE,#1
RET
END
;---------------------------DATE FINISH : 23/10/2007------------------------------------
;---------------------------CHECK : VAN NHAN------------------------------------------
;==========================FINISH==========================











