ĐỒ ÁN TỐT NGHIỆP Nghiên cứu giao thức CAN trên ô tô con ĐẠI HỌC GIAO THÔNG VẬN TẢI






NỘI DUNG ĐỒ ÁN
MỤC LỤC ĐỒ ÁN TỐT NGHIỆP Nghiên cứu giao thức CAN trên ô tô con ĐẠI HỌC GIAO THÔNG VẬN TẢI
MỤC LỤC HÌNH ẢNH VÀ BẢNG .................................................................... 4
CHƯƠNG 1: TỔNG QUAN VỀ MẠNG GIAO TIẾP CAN ..............................5
1.1 Giới thiệu các mạng giao tiếp trên ô tô .................................................... 5
1.1.1. Cấu trúc mạng truyền thông ...........................................................5
1.1.2. Mạng giao tiếp LIN ........................................................................9
1.1.3. Mạng giao tiếp MOST ................................................................... 9
1.1.4. Mạng giao tiếp CAN .................................................................... 10
1.1.5. Mạng giao tiếp Flex-Ray ............................................................. 11
1.1.6. So sánh các mạng giao tiếp ..........................................................11
1.2 Ưu điểm của CAN ................................................
1.3 Cơ sở hình thành của CAN .................................................................... 13
1.4 Nguyên lý hoạt động của mạng CAN .................................................... 16
CHƯƠNG 2: GIAO THỨC CAN TRÊN Ô TÔ ................................................ 17
2.1 Cấu trúc phân lớp của giao thức CAN ................................................... 17
2.1.1. Cấu trúc phân lớp của giao thức CAN .........................................17
2.1.2. Cơ chế giao tiếp ........................................................................... 18
2.1.3. Giải quyết tranh chấp trên BUS ...................................................19
2.2 Cấu trúc bức điện (CAN FRAME) ........................................................ 20
2.2.1. Quy trình tạo sóng ........................................................................20
2.2.2. Trạng thái “dominant” và “recessive” ......................................... 20
2.2.3. Các loại CAN FRAME ................................................................ 21
2.3 Các phương pháp xử lý nhiễu mạng CAN trong ô tô ............................30
2.4 Chức năng của bộ Gateway trên ô tô. .................................................... 32
CHƯƠNG 3: KHAI THÁC KỸ THUẬT GIAO THỨC CAN ......................... 33
3.1 Các triệu chứng và quy trình chẩn đoán mạng CAN .............................33
3.1.1. Hở mạch giữa đường dây mạch chính và quy trình chẩn đoán (xe không có hộp Central Gateway). ........................................................... 33
3.1.2. Hở mạch giữa đường dây mạch chính và quy trình chẩn đoán (xe
có hộp Central Gateway). ...................................................................... 34
3.1.3. Hở mạch ở mạch nhánh và quy trình chẩn đoán (xe không có hộp
Central Gateway). .................................................................................. 36
3.1.4. Hở mạch ở mạch nhánh và quy trình chẩn đoán (xe có hộp
Central Gateway) ................................................................................... 38
3.2 Thi công mạch giao tiếp CAN qua cổng OBD 2 ................................... 39
3.2.1. Trang thiết bị và phần mềm cần thiết để thiết kế mạch .............. 39
3.2.2. Giới thiệu các linh kiện quan trọng ............................................. 40
3.2.3. Giới thiệu phần mềm Arduino IDE ............................................. 44
3.2.4. Sơ đồ nguyên lý ........................................................................... 45
3.2.5. Hình ảnh sản phẩm thực tế .......................................................... 47
MỤC LỤC HÌNH ẢNH VÀ BẢNG
Hình 1.1: Sơ đồ tổng quan hệ thống mạng truyền thông ô tô ..............................5
Hình 1.2: Truyền thông nối tiếp bus .................................................................... 6
Hình 1.3: Sơ đồ cấu trúc hình sao ........................................................................ 6
Hình 1.4: Sơ đồ cấu trúc vòng .............................................................................. 7
Hình 1.5: Sơ đồ cấu trúc lưới ............................................................................... 8
Hình 1.6: Sơ đồ cấu trúc hỗn hợp sao bus ............................................................8
Hình 1.7: Sơ dồ cấu trúc hỗn hợp sao vòng ......................................................... 9
Hình 1.8: Mạng giao tiếp LIN trên ô tô ............................................................... 9
Hình 1.9: Mạng giao tiếp MOST trên ô tô ......................................................... 10
Bảng 1.10: Bảng tóm tắt các mạng giao tiếp ..................................................... 12
Hình 1.11: Mô hình OSI ..................................................................................... 14
Hình 2.2: Sơ đồ CAN BUS ................................................................................ 17
Hình 2.3: Minh họa hai Node giao tiếp ..............................................................18
Hình 2.4: Giải quyết tranh chấp trên BUS ...................................
Hình 2.5: Sơ đồ cấu tạo bên trong CAN Transceiver ........................................ 20
Bảng 2.6: Mức điện áp với mạng CAN ............................................................. 21
Hình 2.7: Cấu trúc khung dữ liệu ....................................................................... 22
Bảng 2.8: Bảng giá trị của DLC ......................................................................... 23
Hình 2.9: Cấu trúc yêu cầu ................................................................................. 25
Hình 2.10: Cấu trúc khung lỗi ............................................................................ 25
Hình 2.11: Tốc độ truyền định nghĩa thời gian cho 1 bit ...................................26
Hình 2.12: Mỗi bit được cấu tạo bởi 4 segments ............................................... 27
Hình 2.13: Vấn đề đồng bộ .................................................................................27
Hình 2.14: Chuỗi dịch chuyển độ dài của segment ........................................... 29
Bảng 2.15: Cơ chế đồng bộ ................................................................................ 30
Hình 2.16: Kiểu bố trí standard termination và split termination ......................32
Hình 2.16: Hộp Central Gateway ....................................................................... 32
Hình 3.1: Sơ đồ mạng CAN trên xe ô tô con bị hở mạch chính ........................33
Hình 3.2: Sơ đồ mạng CAN trên xe ô tô con bị hở mạch chính ........................34
Hình 3.3: Sơ đồ mạng CAN trên xe ô tô con bị hở mạch nhánh ....................... 36
Hình 3.4: Tạo sự hở mạch .................................................................................. 37
Hình 3.5: Xung CAN bình thường ..................................................................... 37
Hình 3.6: Xung CAN bất thường ....................................................................... 37
Hình 3.7: Sơ đồ mạng CAN trên xe ô tô con bị hở mạch nhánh ....................... 38
Hình 3.8: Tạo sự hở mạch .................................................................................. 39
Hình 3.10: Pinout mạch MEGA2560 ................................................................. 40
Hình 3.11: Mạch CAN BUS Shield ................................................................... 41
Hình 3.12: Pinout mạch CAN BUS Shiled ........................................................ 42
Hình 3.13: Module mở rộng giao tiếp PCA9548A ............................................ 43
Hình 3.14: Màn hình OLED 1.3 inch .................................................................43
Hình 3.15: Mạch hiển thị thông số ra màn hình OLED .....................................45
Hình 3.17: Sơ đồ kết nối MEGA2560 với CAN BUS Shield ........................... 46
Hình 3.18: Hình ảnh kết nối MEGA2560 với CAN BUS Shield ...................... 47
Hình 3.19: Hình ảnh sản phẩm hoàn thiện .........................................................47
CHƯƠNG 1: TỔNG QUAN VỀ MẠNG GIAO TIẾP CAN
1.1 Giới thiệu các mạng giao tiếp trên ô tô
- Từ năm 1970 và sự phát triển mạnh mẽ từ đầu những năm 1980, các nhà nghiên cứu đã cho ra đời nhiều giải pháp về giao tiếp trên ô tô khác nhau. Cho tới nay, đã có rất nhiều mạng giao tiếp khác nhau trên ô tô, nhưng chung quy lại có những mạng giao tiếp chính sau đây được áp dụng trên ô tô đời mới.
1.1.1. Cấu trúc mạng truyền thông
- Một mạng được hiểu là một hệ thống trông đó một nhóm các yếu tố có thể trao đổi thông tin qua một phương tiện truyền thông. Nếu các phần tử hiển thị dưới dạng các node và các mối quan hệ truyền thông dưới dạng các đường truyền, thì một mạng gồm tập hợp nhiều node có mối quan hệ truyền thông. Các node trong một mạng truyền thông còn được gọi là các trạm mạng.
Hình 1.1: Sơ đồ tổng quan hệ thống mạng truyền thông ô tô
- Cấu trúc liên kết mạng được hiểu là cấu trúc bao gồm các node và kết nối mạng. Từ đó cho thấy các node nào được liên kết với nhau, nhưng không mô tả chi tiết. Mỗi một node phải có ít nhất một kết nối với node khác để tham gia vào giao tiếp mạng. Các yêu cầu khác nhau được tạo ra từ cấu trúc liên kết mạng cho nhiều ứng dụng mạng truyền thông, cấu trúc liên kết xác định một số đặc điểm của mạng tổng thể. Tất cả các cấu trúc liên kết mạng dựa trên bốn cấu trúc liên kết cơ bản sau:
1. Cấu trúc bus
- Cấu trúc liên kết mạng này cũng được gọi là truyền thông nối tiếp bus. Phần tử cốt lõi của cấu trúc liên kết bus là một cáp chính duy nhất mà tất cả các node được kết nối thông qua các cáp kết nối nhánh(Hình 1.2). Cấu trúc liên kết
này có thể dễ dàng để thêm các trạm mạng khác vào mạng. Thông tin được truyền từ các trạm mạng riêng lẻ lên đường truyền bus.
Hình 1.2: Truyền thông nối tiếp bus
- Các node truyền và nhận tin nhắn. Nếu một node bị lỗi, dữ liệu từ node này sẽ không còn có sẵn trên bus. Tuy nhiên, các node còn lại vẫn tiếp tục trao đổi thông tin bình thường. Tuy nhiên, một mạng có cấu trúc liên kết nối tiếp bus bị lỗi hoàn toàn nếu cáp kết nối chính bị lỗi
- Khi sử dụng cấu trúc sao, nếu trạm mạng bị lỗi hoặc đường truyền đến node chính bị lỗi thì phần còn lại sẽ tiếp tục hoạt động bình thường. Tuy nhiên, nếu node chính bị lỗi thì toàn bộ mạng bị vô hiệu hóa.
- Trên ô tô, cấu trúc này được sử dụng cho các hệ thống an toàn và an ninh như: hệ thống phanh, hệ thống lái, … Trong trường hợp này, nguy cơ lỗi mạng như đã trình bày ở trên hoàn toàn được ngăn chặn bằng cách thiết kế node chính dự phòng. Các node chính dự phòng được sử dụng có thể được kết nối song song để các node phụ có thông tin cần thiết cho hoạt động an toàn của
xe.
3. Cấu trúc vòng
- Trong cấu trúc liên kết vòng, mỗi node được kết nối với hai node lân cận. Các node mạng tạo ra một vòng khép kín(Hình 1.4). Cấu trúc liên kết gồm: cấu trúc vòng đơn, cấu trúc vòng kép.
Hình 1.4: Sơ đồ cấu trúc vòng
- Cấu trúc vòng đơn: dữ liệu được truyền từ node này sang node liền kề. Dữ liệu được node nhận kiểm tra, nếu dữ liệu không dùng cho node nhận thì node này thực hiện việc chuyển tiếp dữ liệu đến node liền kề tiếp theo. Dữ liệu được chuyển từ node này sang node liền kề tiếp theo một vòng cho đến khi đến node cuối hoặc quay trở lại node xuất phát của dữ liệu, tại node xuất phát của dữ liệu thì node thực hiện việc xóa dữ liệu đã gửi.
- Cấu trúc vòng kép: Dữ liệu được truyền hai chiều. Trong cấu trúc này, nếu một node bị lỗi hoặc kết nối giữa hai node bị lỗi thì mạng vẫn hoạt động
bình thường vì tất cả dữ liệu được truyền hai chiều đến tất cả các node vận
hành trong vòng mạng.
4. Cấu trúc lưới
- Trong cấu trúc liên kết lưới, mỗi node được kết nối với một node hoặc nhiều node khác(Hình 1.5). Trong một mạng cấu trúc lưới hoàn chỉnh, mỗi node được kết nối với mọi node khác.
Hình 1.5: Sơ đồ cấu trúc lưới
- Nếu tại một chế độ kết nối không thành công, dữ liệu có thể được định tuyến lại. Do đó, loại mạng này nó mức độ ổn định hệ thống cao. Tuy nhiên, chi phí kết nối mạng cao.
- Ví dụ: Mạng vô tuyến là một loại mạng cấu trúc liên kết lưới, dữ liệu được truyền từ một node được nhận với mọi node khác trong phạm vi.
- Cấu trúc liên kết dạng lưới giống như việc tao đổi thông điệp và giống như cấu trúc hình thành sao liên quan đến việc truyền dữ liệu vì mỗi trạm đều nhận được tất cả các dữ liệu truyền từ mọi trạm khác, nhưng có thể khắc phục lỗi kết nối.
5. Cấu trúc hỗn hợp
- Cấu trúc liên kết hỗn hợp là sự kết hợp của các cấu trúc liên kết mạng khác nhau.
- Ví dụ: Cấu trúc liên kết sao bus: các node trung tâm của một số mạng sao được kết nối với nhau như một mạng truyền thông nối tiếp bus(Hình 1.6).
Hình 1.6: Sơ đồ cấu trúc hỗn hợp sao bus
- Ví dụ: Cấu trúc liên kết sao và vòng: các node trung tâm của một số mạng sao được kết nối với node chính của mạng vòng(Hình 1.7). Các node trung tâm của mạng sao được kết nối dạng một vòng với trạm trung tâm chính này.
Hình 1.7: Sơ dồ cấu trúc hỗn hợp sao vòng
1.1.2. Mạng giao tiếp LIN
- LIN là một mạng giao tiếp khá phổ biến. LIN(Local Interconnect Network) là một kiểu đường truyền nối tiếp giá thành thấp, được sử dụng trên các hệ thống, cảm biến trên ô tô không yêu cầu tốc độ cao. Đây là kiểu đường truyền đơn, mức điện áp 12V. Tốc độ đường truyền LIN có thể đạt tới20Kbit/s.
- LIN thường sử dụng trên những hệ thống phụ, những hệ thống không cần tốc độ truyền cao và dữ liệu nhiều. Một số hệ thống thường dùng mạng giao tiếp LIN như: điều khiển gương, điều khiển ghế, khóa cửa, cửa sổ trời, gạt mưa, nâng hạ kính, …
...
CHƯƠNG 2: GIAO THỨC CAN TRÊN Ô TÔ
2.1 Cấu trúc phân lớp của giao thức CAN
2.1.1. Cấu trúc phân lớp của giao thức CAN
- Chuẩn CAN 2.0 đã được chuẩn hóa trong ISO 11898, chuẩn CAN quy định chi tiết các chức năng và hoạt động của mạng CAN ở hai lớp Data Link và Physical. Đối với lớp Data Link không được quy định trong ISO nhưng hiện nay có hai giao thức phổ biến là CANopen và DeviceNet.
- Các chức năng của hai lớp này đều do phần cứng (vi mạch, chip) chuyên dụng tự thực hiện theo cấu hình được nạp vào. Các chức năng lớp Data Link do chip chuyên dụng CAN controller hoặc ngoại vi CAN được tích hợp sẵn trong vi điều khiển MCU(Microcontroller unit) thực hiện. Chức năng lớp Physical do chip CAN transceiver.
Hình 2.1: Cấu trúc phân lớp của giao thức CAN
Hình 2.2: Sơ đồ CAN BUS
- Xử lý dữ liệu ở node gửi: MCU muốn phát đi một thông điệp. Thông điệp này khi đi qua CAN controller sẽ thành các chuỗi bit nhị phân(01). Và sau đó các chuỗi bit nhị phân này qua CAN transceiver sẽ biến đổi thành tín hiệu điện áp ra ngoài đường truyền và đi đến các Node khác.
- Xử lý dữ liệu ở node nhận: MCU muốn nhận một thông điệp trên đường truyền. Thì tín hiệu điện áp sẽ qua bộ CAN transceiver sẽ biến đổi tín hiệu điện áp thành các chuỗi bit nhị phân gửi đến bộ CAN controller và sau đó bộ controller này sẽ lọc thông điệp và MCU sẽ nhận và hiểu được thông điệp
này.
Node A Node B
Hình 2.3: Minh họa hai Node giao tiếp
2.1.2. Cơ chế giao tiếp
- Đặc trưng của CAN là phương pháp định địa chỉ và giao tiếp hướng đối tượng, trong khi hầu hết các hệ thống bus thường khác đều giao tiếp dựa vào địa chỉ các trạm.Mỗi thông tin trao đổi trong mạng được coi như một đối tượng , được gắn một mã số căn cước .Thông tin được gửi trên bus theo kiểu truyền thông báo với độ dài có thể khác nhau.
- Các thông báo không được gửi tới một địa chỉ nhất định mà bất cứ trạm nào cũng có thể nhận theo nhu cầu.Nội dung mỗi thông báo được các trạm phân biệt qua một mã căn cước ( IDENTIFIER).Mã căn cước không nói lên địa chỉ đích của thông báo, mà chỉ biểu diễn ý nghĩa của dữ liệu trong thông báo.Vì thế, mỗi trạm trên mạng có thể tự quyết định tiếp nhận và xử lý thông báo hay không tiếp nhận thông báo qua phương thức lọc thông báo(message filtering).Cũng nhờ xử dụng phương thức lọc thông báo, nhiều trạm có thể đồng thời nhận cùng một thông báo và có các phản ứng khác nhau.
- Một trạm có thể yêu cầu một trạm khác gửi dữ liệu bằng cách gửi 1 khung REMOTE FRAME.Trạm có khả năng cung cấp nội dung thông tin đó sẽ gửi trả lại một khung dữ liệu DATA FRAME có cùng mã căn cước với khung yêu cầu.Bên cạnh tính năng đơn giản, cơ chế giao tiếp hướng đối tượng ở CAN
còn mang lại tính linh hoạt và tính nhất quán dữ liệu của hệ thống.Một trạm CAN không cần biết thông tin cấu hình hệ thống ( ví dụ địa chỉ trạm), nên việc bổ sung hay bỏ đi một trạm trong mạng không đòi hỏi bất cứ một sự thay đổi nào về phần cứng hay phần mềm ở các trạm khác.Trong một mạng CAN, có thể chắc chắn rằng một thông báo hoặc được tất cả các trạm quan tâm tiếp nhận đồng thời, hoặc không được trạm nào tiếp nhận.tính nhất quán dữ liệu được đảm bảo qua các phương pháp gửi đồng loạt và xử lý lỗi.
2.1.3. Giải quyết tranh chấp trên BUS
- Phương thức giao tiếp của bus CAN là sự phát tán thông tin (broadcast): mỗi điểm kết nối vào mạng thu nhận fame truyền từ nút phát. Sau đó, nỗi nút sẽ quyết định việc sử lý message, có trả lời hay không, có phản hồi hay không…
- Cách thức này giống như sự phát thông tin về đường đi của một trạm phát thanh,: khi nhận được thông tin về đường đi, người lái xe có thể thay đổi lộ trình của anh ta, dừng xe hay thay đổi tài xế hoặc chẳng làm gì cả…
- Giao thức CAN cho phép các nút khác nhau đưa dữ liệu cùng lúc và một quá trình nhanh chóng , ổn định của cơ chế arbitration sẽ xác định xem nút nào được phát đầu tiên.
- Để sử lý thời gian thực, dữ liệu phải được truyền nhanh. Điều này ảnh hưởng không chỉ đường truyền vật lý cho phép tới 1Mbit/s, mà còn đòi hỏi một sự cấp phát nhanh bus trong trường hợp xung đội, khi mà rất nhiều nút muốn truyền đồng thời. Khi trao đổi dữ liệu trên bus, thứ tự sẽ được xác định dựa vào loại thông tin. Ví du, các giá trị hay biến đổi nhanh, như trạng thái của một cảm biến, hay phản hồi của một động cơ, phải được truyền liên tục với độ trễ thấp nhất, hơn là các giá trị khác như nhiệt độ của động cơ, các giá trị thay đổi ít. Trong mạng CAN , phần ID của mỗi message, là một từ gồm 11 bit (version
2.0A) xác định mức ưu tiên. Phần ưu tiên này nằm ở đầu mỗi message. Mức ưu tiên được xác định bởi 7 bit cho verdion 2.0A, tới 127 mức vá mức 128 là
0000000 theo NMT(Netword Management)
- Quy trình phân xử của bus dựa trên phân giải từng bit, theo những nút đang tranh chấp, phát đồng thời trên bus. Nút nào mức ưu tiên thấp hơn sẽ mất sự cạnh tranh với nút có mức ưu tiên cao.
Hình 2.4: Giải quyết tranh chấp trên BUS
2.2 Cấu trúc bức điện (CAN FRAME)
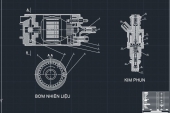
2.2.1. Quy trình tạo sóng
- Khi cần truyền tín hiệu đi thì bộ Driver