ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ TÀU TỰ HÀNH USV ĐH Bách Khoa
NỘI DUNG ĐỒ ÁN
TÓM TẮT LUẬN VĂN THIẾT KẾ TÀU TỰ HÀNH USV
Các phương tiện tự hành dưới nước hiện nay đã được đầu tư nghiên cứu phát triển mạnh ở nhiều quốc gia lớn trên thế giới. Dựa trên những nhu cầu thiết yếu hiện nay của môi trường và một số vấn đề phát sinh khác cho các lĩnh vực nghiên cứu quan trắc hàng hải khác, thì việc nước ta nên đầu tư nghiên cứu và phát triển hướng đề tài này là cần thiết.
Trên cơ sở là các hướng thiết kế và chế tạo hiện nay và dựa theo nhu cầu của khách hàng, ta lập bảng ngôi nhà chất lượng để đánh giá các tiêu chí theo các yêu cầu của khách hàng và theo đó đánh giá đưa ra các yêu cầu thiết kế kỹ thuật. Từ đó đề tài có thể thiết kế theo những hướng nhằm đáp ứng triệt để thỏa mãn nhu cầu khách hàng một cách hiệu quả nhất.
Dựa trên những lý thuyết về thuyết bền, sức nổi và sức cản của cả kiến thức về cơ sở thiết kế máy cũng như thiết kế tàu thủy. Đề tài có thể thiết kế và mô phỏng kết quả của các chi tiết bao gồm cả các bộ phận cơ học và động lực học tối ưu nhất cho việc vận hành tàu với mức độ an toàn cao và hoàn thiện tốt.
Bên cạnh đó việc phát triển và xây dựng phương trình động lực học cho con tàu sẽ là bước đệm đầu tiên cho sự hình thành cơ sở các mạch điện và lập trình giải thuật điều khiển để vận hành con tàu, qua đó ta có thể đáp ứng một cách tối đa và từ đó đề tài có thể tích hợp nhiều hơn các ứng dụng về quan trắc môi trường, …
Vì vậy, qua các ứng dụng tùy thuộc theo mục đích và nhu cầu mà tàu sẽ có nhiều phiên bản cải tiến nhằm có thể đáp ứng được hết tất cả các yêu cầu từ mục đích môi trường cho đến các mục đích quốc phòng.
MỤC LỤC
LỜI CẢM ƠN ..................................................................................................................... i
TÓM TẮT LUẬN VĂN .................................................................................................... ii
DANH MỤC HÌNH .......................................................................................................... vi
DANH MỤC BẢNG ......................................................................................................... ix
CHƯƠNG I: TỔNG QUAN ............................................................................................. 1
1.1. Tổng quan về đề tài ................................................................................................ 1
1.1.1. Giới thiệu về USV ........................................................................................... 1
1.1.2. Ứng dụng của USV vào nước ta ..................................................................... 2
1.2. Mục tiêu, nhiệm vụ và phạm vi của luận văn ........................................................ 4
1.2.1. Mục tiêu........................................................................................................... 4
1.2.2. Nhiệm vụ ......................................................................................................... 4
1.3. Thuận lợi và thách thức.......................................................................................... 5
1.3.1. Thuận lợi ......................................................................................................... 5
1.3.2. Thách thức ....................................................................................................... 5
CHƯƠNG II: PHÂN TÍCH VÀ LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ .................. 6
2.1. Phân tích mô hình USV ......................................................................................... 6
2.1.1. Đánh giá và lựa chọn phương án thiết kế theo yêu cầu .................................. 6
2.1.2. Phương án 1 ..................................................................................................... 7
2.1.3. Phương án 2 ................................................................................................... 10
2.2. Cấu trúc và sơ đồ của một USV điển hình ........................................................... 12
2.2.1. Kết cấu chung ................................................................................................ 12
2.2.2. Động cơ và điều khiển .................................................................................. 13
2.2.3. Nguyên lý hoạt động của USV...................................................................... 14
CHƯƠNG III: TÍNH TOÁN THIẾT KẾ PHẦN THÂN CHO USV ......................... 16
3.1. Cơ sở lý thuyết ..................................................................................................... 16
3.1.1. Tính sơ bộ và vẽ phác thảo phần thân ........................................................... 16
Mục lục GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn iv
3.1.2. Tính toán phần thân trên lý thuyết tàu thủy .................................................. 17
3.1.3. Mô phỏng kiểm tra phần thân thuyền ........................................................... 20
3.2. Chế tạo thân thuyền ............................................................................................. 35
3.2.1. Vật liệu chế tạo thuyền điền hình .................................................................. 35
3.2.2. Vật liệu chế tạo thân thuyền .......................................................................... 38
CHƯƠNG IV: THIẾT KẾ PHẦN KHUNG NỐI 2 THÂN VÀ CÁC CHI TIẾT KHÁC ............................................................................................................................... 48
4.1. Thiết kế khung nối 2 thân .................................................................................... 48
4.1.1. Cơ sở thiết kế ................................................................................................ 48
4.1.2. Thiết kế chi tiết .............................................................................................. 49
4.2. Thiết kế ống đạo lưu ............................................................................................ 57
4.2.1. Cơ sở thiết kế ................................................................................................ 57
4.2.2. Thiết kế chi tiết .............................................................................................. 59
4.3. Các chi tiết khác ................................................................................................... 64
CHƯƠNG V: XÂY DỰNG PHƯƠNG TRÌNH TOÁN ĐỘNG LỰC HỌC CHO MÔ HÌNH ................................................................................................................................ 71
5.1. Giới thiệu chung ................................................................................................... 71
5.1.1. Định nghĩa hệ quy chiếu và ký hiệu của các tham số động học tàu thủy: .... 72
5.1.2. Định nghĩa ma trận xoay, sự chuyển đổi giữa BODY và NED: ................... 78
5.2. Xây dựng phương trình toán ................................................................................ 79
5.2.1. Phương trình động học .................................................................................. 79
5.2.2. Phương trình động lực học ............................................................................ 85
5.3. Mô hình toán rút gọn với 3 bậc tự do ................................................................ 103
CHƯƠNG VI: ĐÁNH GIÁ VÀ KẾT LUẬN .............................................................. 106
6.1 Đánh giá kết quả ................................................................................................ 106
6.1.1. Hoàn thành ...................................................................................................... 106
6.1.2. Hạn chế ........................................................................................................... 106
6.2 Hướng phát triển đề tài ...................................................................................... 107
Mục lục GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn v
6.3. Kết luận .............................................................................................................. 107
TÀI LIỆU THAM KHẢO ............................................................................................. 109
Danh mục hình GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn vi
DANH MỤC HÌNH
Hình 1.1: Một số loại phương tiện vận hành trong nước .................................................... 1
Hình 1.2: Tình hình quan trắc ở Việt Nam .......................................................................... 2
Hình 1.3: USV ESM30 và WAM-V.................................................................................... 3
Hình 2.1: Các loại tàu 1 - 2 - 3 thân phổ biến hiện nay ....................................................... 6
Hình 2.2: USV phục vụ nhu cầu quân đội hàng hải ............................................................ 7
Hình 2.3: USV phục vụ khảo sát ô nhiễm môi trường ........................................................ 8
Hình 2.4: USV 2 thân đang di chuyển đến khu vực thực nghiệm ..................................... 10
Hình 2.5: Kết cấu điều khiển của 1 USV điển hình .......................................................... 12
Hình 2.6: Một số loại động cơ đẩy thông dụng của USV ................................................. 13
Hình 2.7: Loại Pin thường dùng cho USV ........................................................................ 14
Hình 2.8: Sơ đồ nguyên lý hoạt động của một USV ......................................................... 14
Hình 2.9: Sơ đồ động của tàu 2 thân ................................................................................. 15
Hình 3.1: Sơ đồ tuyến hình và tính toán sơ bộ .................................................................. 17
Hình 3.2: Bố trí thiết bị và trọng tâm của tàu .................................................................... 20
Hình 3.3: Biểu đồ tương quan lực nổi và chiều chìm ........................................................ 21
Hình 3.4: Kết quả tính lực nổi ........................................................................................... 21
Hình 3.5: Kết quả tính cân bằng dọc ................................................................................. 22
Hình 3.6: Đồ thị GZ đặc trưng cho ổn định ngang ............................................................ 23
Hình 3.7: Tương quan giữa công suất và vận tốc tàu ........................................................ 24
Hình 3.8: Hình phác thảo 3D cho thân tàu ........................................................................ 25
Hình 3.9: Cấu trúc các lớp của composite điển hình ......................................................... 36
Danh mục hình GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn vii
Hình 3.10: Một số loại gỗ nhân tạo hiện nay .................................................................... 36
Hình 3.11: Các loại composite khác .................................................................................. 37
Hình 3.12: Sản phẩm và cấu trúc tế vi của composite FRP .............................................. 40
Hình 3.13: Ứng dụng của composite FRP vào các tàu đánh cá ........................................ 43
Hình 3.14: Loại keo gia cường thường dùng trét lớp cho composite FRP ....................... 44
Hình 3.15: Sợi thủy tinh gia cường phổ biến .................................................................... 45
Hình 3.16: Thành phẩm sau các công đoạn gia công ........................................................ 47
Hình 4.1: Tổng tải trọng thiết bị đặt lên USV ................................................................... 50
Hình 4.2: Sơ đồ bố trí các thiết bị trên khung nối 2 thân .................................................. 50
Hình 4.3: Vật liệu nhôm tấm được sử dụng phổ biến ....................................................... 51
Hình 4.4: Phác thảo 3D khung nối 2 thân ......................................................................... 52
Hình 4.5: Chia lưới mô phỏng cho chi tiết ........................................................................ 55
Hình 4.6: Ứng suất sinh ra ở các vị trí trên khung ............................................................ 55
Hình 4.7: Chuyển vị ở các vị trí trên khung ...................................................................... 56
Hình 4.8: Tương quan thông số hình học và vận tốc lưu chất ống đạo lưu ...................... 58
Hình 4.9: Phác thảo 2D mặt cắt ngang dự kiến ống đạo lưu ............................................. 61
Hình 4.10: Phác thảo 3D của 3 hình chiếu ống ................................................................. 62
Hình 4.11: Nhựa PLA và một số sản phẩm in 3D ............................................................. 64
Hình 4.12: Các thông số của động cơ Endura C2 ............................................................. 66
Hình 4.13: Phác thảo 3D chi tiết 1 .................................................................................... 67
Hình 4.14: Phác thảo 3D chi tiết 2 .................................................................................... 68
Hình 4.15: Phác thảo 3D chi tiết cùm spindle ................................................................... 69
Danh mục hình GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn viii
Hình 4.16: Cụm chi tiết sau khi gá đặt .............................................................................. 69
Hình 4.17: Nhựa Silicone chống thấm đàn hồi ................................................................. 70
Hình 5.1: Các vận tốc của 6 bậc tự do : u, v, w, p, q, r trong môt hệ quy chiếu gắn vơi tàu .......................................................................................................................................... 71
Hình 5.2: Đinh nghĩa các hệ quy chiêu {i} = (xi, yi, zi), {e} = (xe, ye, ze), {n} = (xn, yn, zn), .................................................................................................................................... 73
Hình 5.3: Quy ước các trục cua hệ tọa đô BODY gắn cố định với tàu thủy ..................... 74
Hình 5.4: Cân bằng khuynh tâm ngang. Khi đó mg=ρg∇, một hình tương có thể được rút ra để minh họa cho sự ổn định khuynh tâm dọc bằng cách thay thế MT với ϕ bằng ML với θ ........................................................................................................................................ 93
Danh mục bảng GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn ix
DANH MỤC BẢNG
Bảng 2.1: Ngôi nhà chất lượng cho phương án 1 ................................................................ 9
Bảng 2.2: Ngôi nhà chất lượng cho phương án 2 .............................................................. 11
Bảng 3.1: So sánh ưu - nhược điểm của 3 loại vật liệu ..................................................... 41
Bảng 4.1: Thông số vật liệu nhôm và các vị trí tính chất lực và ngàm đặt lên khung ...... 53
Bảng 4.2: Ứng suất sinh ra trong khung ............................................................................ 55
Bảng 4.3: Chuyển vị mỗi điểm trong khung ..................................................................... 56
Bảng 4.4: Thông số kỹ thuật của cùm spindle .................................................................. 68
Bảng 5.1: Danh sách các biến trong hệ 6 bậc tự do .......................................................... 75
Chương I: Tổng quan
SVTH: Trang Thế Toàn 10
Chương I: Tổng quan GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 1
CHƯƠNG I: TỔNG QUAN
1.1. Tổng quan về đề tài
1.1.1. Giới thiệu về USV
- Đại dương chiếm hơn 70% bề mặt diện tích trái đất, rất nhiều ứng dụng, dự án đang được thực hiện với nguồn tài nguyên quan trọng này. Các cuộc khảo sát môi trường nước cung cấp nhiều ứng dụng cho các hệ thống robot. Thu thập dữ liệu đại dương, thực hiện các hoạt động khảo sát, thực hiện các hoạt động cứu hộ hay các hoạt động quân sự trong nước có thể tốn kém và nguy hiểm nếu được thực hiện bởi con người. Hiện nay bốn loại robot hoạt động trên và trong nước chính như: Autonomous Underwater Vehicles (AUVs), Remotely Operated Vehicles (ROVs), Unmanned Surface Vehicles (USVs) và Autonomous Surface Vehicles (ASVs) …
Hình 1.1: Một số loại phương tiện vận hành trong nước
Chương I: Tổng quan GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 2
1.1.2. Ứng dụng của USV vào nước ta
- Những phương tiện nói trên có thể hoạt động tự động mà không cần người lái hay sử dụng, nhờ giải thuật điều khiển đã được lập trình sẵn. Các robot nói trên có thể sử dụng trong các môi trường thủy sinh, từ đại dương đến sông hồ và một số môi trường có nồng độ hóa chất cao khác để đảm bảo an toàn cho con người.
- Mặt khác việc quan trắc và khảo sát sông hồ, kênh rạch đang gặp phải nhiều bất trắc như: ô nhiễm nguồn nước đang diễn ra phức tạp trên cả nước, ảnh hưởng không nhỏ đến đời sống người dân, phát triển kinh tế và an ninh quốc phòng. Việc quan trắc, khảo sát sông hồ, kênh rạch đang tồn tại một số hạn chế như sau:
• Tính cơ động và hoạt động liên tục không cao;
• Các chương trình quan trắc hiện nay hầu hết được thực hiện thủ công thông qua các thiết bị truyền thống từ con người;
• Phương pháp đo nhanh liên tục, mới nhất hiện giờ đang được sử dụng, và vẫn còn nhiều hạn chế chưa được khắc phục do sản phẩm không được phù hợp với điều kiện địa lý cũng như môi trường trong nước.
Hình 1.2: Tình hình quan trắc ở Việt Nam
- Từ việc phân tích đánh giá quan trắc môi trường nước truyền thống nước ta, ta rút ra được một số ưu điểm sau về mô hình USV thực hiện:
• Đo trực tiếp, nhanh;
Chương I: Tổng quan GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 3
• Liên tục trên phạm vi lớn;
• Tiết kiệm nhân công;
• Khả năng tự động hóa cao, tiết kiệm chi phí vận hành;
• Dữ liệu cần quan trắc được cài đặt sẵn theo lịch trình với hành trình ngắn nhất về đường đi, đồng thời thể hiện lại dữ liệu so sánh với mẫu đo trước để tiện cho việc đánh giá môi trường.;
• Hoạt động tốt trên nhiều loại môi trường ô nhiễm, điều kiện thời tiết xấu với độ tin cậy cao.
Về kết cấu điện điều khiển tự động:
- Phạm vi áp dụng cho USV đã được tăng trong vài năm qua. Ngày nay USV được phát triển bởi các phòng thí nghiệm, các tập đoàn và các tổ chức chính phủ. Các ứng dụng bao gồm khảo sát và theo dõi, lập bản đồ đo đạc, thu thập, phân tích dữ liệu, mẫu nước, các nhiệm vụ cứu hộ và phòng vệ.
- Hiện tại, trong nước vẫn chưa có một nghiên cứu hoàn chỉnh nào thiết kế chế tạo thuyền người lái phục vụ quan trắc môi trường nước có thể ứng dụng vào thực tế. Hầu hết chúng ta phải sử dụng các thiết bị, công nghệ ngoại nhập với giá thành rất cao, chi phí bảo trì, bảo dưỡng tốn kém.
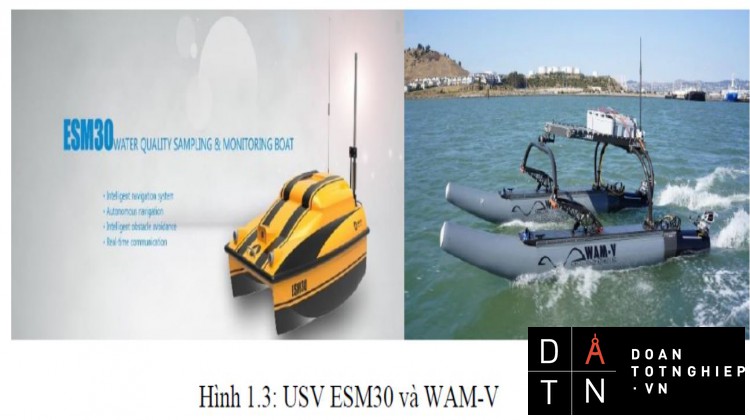
- Một số loại USVs phổ biến hiện nay:
Hình 1.3: USV ESM30 và WAM-V
Chương I: Tổng quan GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 4
1.2. Mục tiêu, nhiệm vụ và phạm vi của luận văn
1.2.1. Mục tiêu
- Phần luận văn nhắm đến xây dựng mô hình USV với các chức năng đơn giản. Xây dựng được sản phầm USV phục vụ quan trắc môi trường nước, mang tính ứng dụng và thực tiễn cao trong dân sự, quân sự và chứng minh khả năng làm chủ trong nghiên cứu và nắm bắt công nghệ tiên tiến. Mục tiêu cơ bản luận văn như sau :
• Xây dựng ý tưởng thiết kế cho USV, lựa chọn loại USV và các chức năng tương đối cơ bản mà USV cần có;
• Lựa chọn phương án thiết kế, xây dựng và phát triển phương án thiết kế;
• Lựa chọn cơ cấu truyền động cho USV;
• Thiết kế sơ bộ phần cơ khí;
• Đánh giá thiết kế;
• Thiết kế chi tiết phần cơ khí cho USV theo từng module và tiến hành mô phỏng chuyển động (nếu có);
• Thiết kế các cơ cấu gá, lắp ghép chi tiết theo tiêu chuẩn và mô phỏng sức bền;
• Thiết kế bộ phận liên kết giữa hệ USV – ROV;
• Đánh giá kết quả và thu hoạch.
1.2.2. Nhiệm vụ
• Tìm hiểu các phương án thiết kế và lựa chọn phương án thiết kế để phát triển ý tưởng;
• Phác thảo ý tưởng thiết kế đã lựa chọn;
• Tối ưu hóa thiết kế theo hướng thiết kế theo module;
Chương I: Tổng quan GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 5
• Tìm hiểu về các loại động cơ đẩy cho các thiết bị tự hành dưới nước và lựa chọn sao cho phù hợp;
• Thiết kế các phương án gá đặt cho các thiết bị điện và kiểm tra cân bằng;
• Thiết kế cơ cấu nâng hạ cho ROV trong hệ USV – ROV;
• Thực nghiệm kiểm chứng khả năng hoạt động thực tiễn và thu hoạch.
1.3. Thuận lợi và thách thức
1.3.1. Thuận lợi
- Hiện nay trên thế giới USV có nhiều hình dạng kích thước, cũng như chức năng khác nhau, đầu tiên ta phải xác định hướng áp dụng USV vào tình hình nước ta, phân tích ưu nhược điểm của các mô hình hiện tại, và phải phù hợp với đề tài luận văn về tối ưu thiết bị, cũng như khả năng linh hoạt trong quá trình điều khiển.
- USV hướng tới di chuyển trong khu vực hồ hoặc sông rộng, chạy tốc độ vừa phải để nhằm mục đích lấy mẫu nước và phân tích mẫu nước trực tiếp.
- Về thời gian hoạt động của USV cũng là điều quan trong, đề tài hướng đến hoạt động 1-2h hoặc hơn.
- Khả năng điều khiển linh hoạt.
1.3.2. Thách thức
- Khả năng thiết kế theo nhu cầu chưa thực sự đáp ứng triệt để;
- Tầm hoạt động cũng như thời gian vận hành còn hạn chế;
- Do tính chất đề tài mang tính học thuật nghiên cứu nên có một số thiết kế chưa thực sự tối ưu;
- Do là mô hình nghiên cứu nên thường xuyên phải đầu tư kiểm tra bảo trì.
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 6
CHƯƠNG II: PHÂN TÍCH VÀ LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ
2.1. Phân tích mô hình USV
2.1.1. Đánh giá và lựa chọn phương án thiết kế theo yêu cầu
Có thể chia các cơ cấu làm 3 phần:
- Thân thuyền
- Động cơ và điều khiển
- Các thiết bị điều khiển công tác
Hình 2.1: Các loại tàu 1 - 2 - 3 thân phổ biến hiện nay
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 7
Dạng tàu nhiều thân được chọn có thể là 2 thân (Catamaran) hoặc 3 thân (Trimaran). Với tàu 3 thân 2 thân phụ có chức năng giống tàu 2 thân còn thân chính (ở giữa) có khả năng dự trữ lực nổi do vậy có thể tăng sức chở cho tàu.
2.1.2. Phương án 1
- Chọn loại thuyền 1 thân được tính toán phần thân thuyền dựa trên các nguyên lý tính toán sức nổi và sức cản. Sử dụng động cơ đẩy và điều khiển tương đối nhẹ nhàng và do đó khiến cho việc điều khiển cũng sẽ dễ dàng hơn.
Hình 2.2: USV phục vụ nhu cầu quân đội hàng hải
- Được trang bị hệ thống cảm biến chuyên phục vụ hoạt động trên biển. Từng chứng minh tính hiệu quả khi phục vụ cho các tàu vận tải chở dầu và quặng số lượng lớn bởi các nhà nghiên cứu ở Hàn Quốc. Cảm biến thu thập dữ liệu cả trên và dưới thân tàu rồi vừa xử lý ngay trên tàu vừa chuyển tự động vào trung tâm trên đất liền. Loại mô hình này thích hợp với nhiều nhiệm vụ như giám sát tình trạng ô nhiễm ở bến cảng, điều tra hải dương học, tuần tra lãnh hải… Tính năng nâng cao của các mô hình phát triển cao ở nước ngoài hiện nay đó là công nghệ tàng hình.
- Tuy nhiên, một vài điểm hạn chế cần phải kể đến đó là: Tối ưu động lực học, cân bằng, khó điều khiển trọng tâm cân bằng trong điều khiển cân bằng, tiêu tốn nhiều năng lượng cho động cơ đẩy ở bên, …
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 8
Hình 2.3: USV phục vụ khảo sát ô nhiễm môi trường
- Thiết lập ngôi nhà chất lượng để xác định các giá trị giới hạn của các thông số kỹ thuật:
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 9
Bảng 2.1: Ngôi nhà chất lượng cho phương án 1
Biên dạng thân thuyền Động cơ điều khiển
Vật liệu chế tạo Kích thước mô hình
Bộ phận công tác Tốc độ di chuyển
Mức độ yêu cầu Mức hiện tại
Mưc thiết kế Hệ số cạnh tranh
Hệ số tầm quan trọng Hệ số cải tiến tuyệt đối
Hệ số cải tiến tương đối
Năng suất hoạt động
0.28 Tính ổn định 1 3 1 1 3 4 4 4 1 1 4 0.148
Tuổi thọ
0.148 Chi phí 3 3 9 3 3 3 2 0.67 1 2 0.074 Chất lượng sản phẩm tạo ra 1 9 9 5 4 4 1 1.5 7.5 0.28 Ô nhiễm môi trường 1 1 1 2 2 2 1 1 2 0.074
Trọng số tuyệt đối
1,00 Trọng số tương đối 0.23 0.10 0.19 0.06 0.26 0.16
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 10
2.1.3. Phương án 2
- Ở đây loại thuyền 2 thân cũng được tính toán phần thân thuyền dựa trên các nguyên lý tính toán sức nổi và sức cản. Sử dụng động cơ đẩy tuy có phần công suất lớn hơn so với thuyền 1 thân. Tuy nhiên lại có được ưu điểm là rất dễ dàng điều khiển trọng tâm cân bằng trong mọi điều kiện thời tiết.
Hình 2.4: USV 2 thân đang di chuyển đến khu vực thực nghiệm
- Có thể ổn định lại vừa có tính lắc êm (chu kỳ lắc lớn, biên độ lắc nhỏ). Ưu điểm của thuyền 2 thân là có tính ổn định cao hơn so với thuyền 1 thân cùng kích cỡ, đặc biệt là tính ổn định (tính ổn định ngang sẽ tăng nhanh chóng khi ngập trong nước), làm cho thuyền hầu như không thể bị lật úp.
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 11
Bảng 2.2: Ngôi nhà chất lượng cho phương án 2
Biên dạng thân thuyền Động cơ điều khiển
Vật liệu chế tạo Kích thước mô hình
Bộ phận công tác Tốc độ di chuyển
Mức độ yêu cầu Mức hiện tại
Mưc thiết kế Hệ số cạnh tranh
Hệ số tầm quan trọng Hệ số cải tiến tuyệt đối
Hệ số cải tiến tương đối
Năng suất hoạt động
0.31 Tính ổn định 9 3 3 3 1 3 4 4 4 1 1 4 0.1003
Tuổi thọ
0.1003 Chi phí 9 9 9 3 3 3 2 0.67 1 2 0.079 Chất lượng sản phẩm tạo ra 9 1 9 9 5 4 4 1 1.5 7.5 0.31 Ô nhiễm môi trường 1 1 1 2 2 2 1 1 2 0.1003
Trọng số tuyệt đối
1,00 Trọng số tương đối 0.28 0.13 0.2 0.04 0.18 0.17
1,00
Đơn vị
Kw
Không
Không
Mm
Mm
m/s
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 12
- Những ưu điểm tiếp theo của thuyền 2 thân là độ nghiêng thấp, đặc tính sức cản rất ưu việt, nhất là ở tốc độ cao do có thể tăng độ thon của thuyền mà không ảnh hưởng đến tính ổn định. Điều này lý giải vì sao với thuyền cao tốc hoạt động ở chế độ nổi toàn phần, có ưu thế về tính tốc độ khi hoạt động. Ngoài 12 ra, thuyền còn có lợi thế mặt boong khá rộng nên dễ dàng bố trí mang các thiết bị khác: cảm biến đo, AUV, ….
Vì vậy theo đó ta sẽ chọn loại 2 thân cho mô hình này.
2.2. Cấu trúc và sơ đồ của một USV điển hình
2.2.1. Kết cấu chung
- Có rất nhiều loại USV và chúng khác nhau dựa trên ứng dụng và chức năng. Có một vài USV cho phép cả kiểm soát bằng tay và tự động. Một USV điển hình bao gồm một thân tàu, một hệ thống đẩy, một hệ thống dẫn đường, một dữ liệu hệ thống thu gom và hệ thống truyền thông.
- Cấu trúc của một USV điển hình:
Hình 2.5: Kết cấu điều khiển của 1 USV điển hình
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 13
- Nhờ đó, hệ thống cho phép ta liên tục tương tác giữa người điều khiển với mô hình thông qua màn hình điều khiển, lập trình điều khiển sẽ giúp cho người điều khiển có thể xử lý dữ liệu từ xa hoặc xử lý một số trường hợp xảy ra khi thao tác thực tế.
2.2.2. Động cơ và điều khiển
- Trong mô hình này sử dụng động cơ đẩy dưới nước, với yêu cầu là toàn bộ động cơ chìm trong nước với thiết kế chống thấm cho động cơ. Ưu điểm: hoạt động chính xác, có hồi tiếp, moment và khả năng chịu tải ổn định, giá thành thấp.
- Động cơ DC servo được lựa chọn sử dụng ở đây là vì phù hợp với mô hình thuộc dạng nhỏ, yêu cầu điều khiển chính xác và không phải xử lý tải quá lớn. Nguồn cấp cho động cơ khoảng 24v.
Hình 2.6: Một số loại động cơ đẩy thông dụng của USV
- Pin Li-po (Lithium-Polymer)
Ưu điểm: Khi sử dụng loại này dùng được lâu, lại sạc được và điện áp của mỗi viên khá cao: 3.7V, khối lượng nhẹ.
Nhược điểm : Dòng thấp
Với yêu cần về khối lượng cũng như dòng áp cao nên sử dụng pin Li-po mỗi cell 3.7V -13A, khối lượng vừa đáp ứng nhu cầu USV.
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 14
Hình 2.7: Loại Pin thường dùng cho USV
2.2.3. Nguyên lý hoạt động của USV
- Được truyền động trực tiếp bằng động cơ đẩy (Thruster), mô hình có thể tận dụng được tối đa công suất thực nghiệm của động cơ đẩy. Với thân thuyền đảm bảo các yếu tố như: độ bền, chống thấm, chống ăn mòn trong môi trường biển, … Từ đó mà động cơ đẩy cũng như động cơ lái cũng phải có mức công suất tương đương.
- Với loại Pin Lipo 3.7V - 13Ah, ta có thể sử dụng để cung ứng tốt cho các thiết bị điện gồm các động cơ và một số thiết bị điện khác trong suốt quá trình hoạt động với dự toán khoảng 4 giờ đồng hồ.
- Sơ đồ nguyên lý sau thể hiện mối quan hệ giữa các thiết bị:
Hình 2.8: Sơ đồ nguyên lý hoạt động của một USV
- Nhờ vào tính linh hoạt của mô hình, nên ngoài các module để điều khiển thì thuyền còn được lắp đặt một số thiết bị và cảm biến, dùng cho nhiều mục đích khác nhau
Chương II: Phân tích và lựa chọn phương án thiết kế GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 15
như: thu thập mẫu nước, quan trắc môi trường để vẽ bản đồ khu vực, cứu hộ hay là dùng để thám hiểm các khu vực hoặc môi trường nguy hiểm cho con người.
- Mô hình sẽ sử dụng loại lập trình điều khiển PD và PID, phương thức điều khiển sẽ gồm tự động và bằng tay tạo sự thuận tiện. Tận dụng khả năng phản hồi để xử lý điều khiển cho USV thông qua tín hiệu GPS trả về và bộ điều khiển động cơ.
- Sơ đồ động của USV:
Hình 2.9: Sơ đồ động của tàu 2 thân
1/ Động cơ đẩy (Thruster) 2/ Động cơ ngang (Seabotic)
3/ Thân thuyền 4/ Khung gá nối 2 thân
Chương III: Tính toán thiết kế phần thân cho USV GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 16
CHƯƠNG III: TÍNH TOÁN THIẾT KẾ PHẦN THÂN CHO USV
3.1. Cơ sở lý thuyết
3.1.1. Tính sơ bộ và vẽ phác thảo phần thân
Phương án thiết kế chọn thân USV
Thông thường khi thiết kế thân tàu thủy nói chung được thực hiện qua các bước:
Bước 1: Yêu cầu chung về thiết kế (nhiệm vụ thư thiết kế)
Bước 2: Tính toán thông số cơ bản cho thân chính, thân phụ
Bước 3: Ước lượng công suất cần thiết (tính từ sức cản, vận tốc di chuyên)
Bước 4: Xây dựng đường hình dáng thân chính, thân phụ
Bước 5: Đánh giá ổn định
Bước 6: Bố trí chung toàn tàu
Bước 7: Thiết kế kết cấu
Bước 8: Hệ thống, thiết bị
Bước 9: Thử tại bến
Bước 10: Ước lượng giá thành
Qui trình trên có thể tính lặp nhiều lần nhằm thỏa mãn yêu cầu chung ở bước một. Trong phạm vi nghiên cứu của đề tài, USV giống tàu 2 thân tuy nhiên kích thước của nó khá nhỏ do vậy phương án thiết kế sẽ không giống tàu truyền thống mà chỉ tập trung giải quyết vấn
Chương III: Tính toán thiết kế phần thân cho USV GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 17
đề tính nổi, độ ổn định và sức cản. Phương án cụ thể dùng trong đề tài là: chọn trước thân tàu đã có dùng tỉ lệ hình học để chuyển sang dạng USV mong muốn kết quả cuối cùng là mẫu có tính ổn định và sức cản phù hợp. Do quá trình thiết kế cần tính lặp khá nhiều do vậy nhóm sử dụng phần mềm chuyên ngành giúp hỗ trợ cho quá trình tính toán và kiểm tra.
Sơ đồ khối mô tả quá trình tính toán dựa vào phần mềm chuyên ngành:
Do số lượng tính và kết quả so sánh khá phức tạp và đa dạng, các kết quả tính trong phạm vi đề tài được trích từ kết quả mô phỏng và tính toán từ phần mềm Maxsurf.
Sơ đồ tính toán được tóm tắt như sau:
Hình 3.1: Sơ đồ tuyến hình và tính toán sơ bộ
3.1.2. Tính toán phần thân trên lý thuyết tàu thủy
Đánh giá cân bằng dọc và ổn định ban đầu:
Chương III: Tính toán thiết kế phần thân cho USV GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 18
Kết quả tính toán cân bằng dọc nhằm cho biết tình trạng chúi của tàu (chúi mũi hoặc
lái). Kết quả đánh giá sẽ dựa vào góc chúi hoặc sự thay đổi mớn nước mũi tm và lái tl
so với ban đầu:
Ổn định ban đầu được hiểu như tàu nghiêng ngang ở góc nghiêng nhỏ hơn 13 độ.
Trong giai đoạn này giá trị GM đóng vai trò quan trọng vì khả năng phục hồi vị trí nổi
thẳng đứng cũng như chu kì lắc ngang T thường phụ thuộc vào giá trị GM. Vai trò của GM
được minh họa như hình bên dưới:
= sin ph M D GM - Moment phục hồi
- Chu kỳ lắc ngang
Môment phục hồi Mph càng lớn tàu nhanh chóng quay về vị trí nổi thẳng đứng.
Chương III: Tính toán thiết kế phần thân cho USV GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 19
Tuy nhiên, chu kì lắc T ngắn làm cho tàu chao đảo liên tục.
Kiếm tra ổn định:
Được hiểu như khả năng nghiêng ngang lớn nhất mà tàu đạt được khi ngoại lực tác
động, ngoại lực được xem là môment gây nghiêng Mng và khả năng chống lại ngoại lực
này vẫn là Mph tuy nhiên được xét ở giai đoạn nghiêng ngang ở góc lớn hơn 13 độ.
Vậy hiểu rằng tàu có thể ổn định hay không là dựa vào hệ số an toàn sau:
= 1 ph
ng
M
HSAT
M
Để đánh giá chính xác môment nghiêng ta cần giả định trước các trạng thái tải trọng
được xem là nguy hiểm (trạng thái tàu chở đầy tải…).
Để tính toán chính xác môment phục hồi ta cần khảo sát sự thay đổi của giá trị GZ ứng
với các góc nghiêng ngang khác nhau. Bức tranh chung nhất là đồ thị GZ hay còn gọi là
đồ thị tay đòn moment phục hồi.
USV thực hiện khảo sát trong môi trường sông sóng thấp và chịu ảnh hưởng của gió,
để đảm bảo tính an toàn nhóm nghiên cứu đề xuất đánh giá ổn định cho USV theo tiêu
chuẩn của tàu cấp SI là tàu sông có khả năng chạy đến cửa biển.
Bên cạnh đó, trong kiểm tra ổn định cần xác định trạng thái tính nguy hiểm do vậy trong
đề tài chọn trạng thái tính là trạng thái đầy tải nghĩa là USV đã được trang bị đầy đủ trang
thiết bị khi hoạt động. Trạng thái tính được hiểu là trọng tâm và trọng lượng USV ứng với
việc bố trí trang thiết bị hiện tại, cụ thể minh họa bằng hình bên dưới:
Chương III: Tính toán thiết kế phần thân cho USV GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 20
Hình 3.2: Bố trí thiết bị và trọng tâm của tàu
Tải trọng kiểm tra là khi USV mang đầy đủ thiết bị khi làm việc, để xác định trọng lượng toàn bộ được chia thành 3 cụm chính: vỏ composite, thiết bị đẩy, hộp điều khiển, pin. Trọng lượng và trọng tâm tàu ước lượng sơ bộ:
− Trọng lượng toàn tải giả định P = 160 Kg.
− Trọng tâm tương ứng: LCG = 58.5mm (so với vị trí sườn giữa).
KG = 161mm (so với đáy tàu – Baseline).
Thông thường phương tiện thủy được kiểm tra ổn định dựa vào tiêu chuẩn của qui phạm phân cấp và đóng tàu, tuy nhiên USV là thiết bị quan trắc không chở người hay hàng hóa hơn nữa kích thước USV cũng khá nhỏ do vậy trong phạm vi nghiên cứu của đề tài việc kiểm tra đánh giá ổn định nhằm đảm bảo USV cân bằng và ổn định khi làm việc qua đó có những điều chỉnh thích hợp.
Kiểm tra đánh giá ổn định được thực hiện qua các nội dung:
− Khả năng chuyên chở lớn nhất.
− Cân bằng dọc của USV.
− Ổn định ngang của USV.
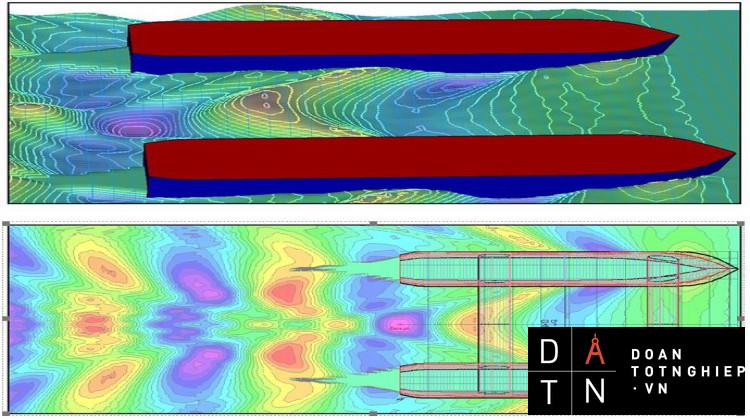
3.1.3. Mô phỏng kiểm tra phần thân thuyền
Khả năng chuyên chở lớn nhất:
Chương III: Tính toán thiết kế phần thân cho USV GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 21
− Được đánh giá theo chiều chìm và lực nổi tương ứng, kết quả được minh họa theo hình dưới:
Hình 3.3: Biểu đồ tương quan lực nổi và chiều chìm
− Với kết quả trên USV có khả năng chở được trọng lượng lớn nhất khoảng 200Kg.
− Với tải trọng P = 160Kg, chiều chìm tương ứng khoảng d = 250mm.
Hình 3.4: Kết quả tính lực nổi
➔ Vậy với tải trọng trên USV đủ lực nổi để hoạt động.
Cân bằng dọc của USV:
− Cân bằng dọc giúp đánh giá tìn trạng chúi tàu theo phương dọc, với tải trọng và trọng tâm trên kết quả cân bằng dọc được minh họa theo hình sau:
Chương III: Tính toán thiết kế phần thân cho USV
...........
.1 Đánh giá kết quả
6.1.1. Hoàn thành
Luận văn đã hoàn thành các nội dung gồm:
- Tìm hiểu tổng quan về USV;
- Phân tích các phương án thiết kế và lựa chọn thiết kế phù hợp với điều kiện đặt ra;
- Thiết kế và mô phỏng thân tàu đảm bảo lực nổi và lựa chọn thiết bị đẩy phù hợp với sức cản của thân tàu;
- Thiết kế đầy đủ các chi tiết gá đặt nhằm đảm bảo khả năng gá thiết bị khảo sát cũng như gia cố chống thấm cho tàu;
- Xây dựng phương trình toán động lực học cho mô hình.
6.1.2. Hạn chế
Bên cạnh đó, do là đề tài lần đầu tiên được thực hiện trong bộ môn và quy mô kiến thức cung cấp cho đề tài thuộc nhiều lĩnh vực khác ngoài ngành nên cũng có nhiều hạn chế khó tránh khỏi như:
- Khả năng chọn mức dung sai chưa thực sự chính xác đối với các chi tiết của tàu thủy;
- Một số thiết bị được gá đặt chỉ mang tính tương đối nên khả năng phải thường xuyên kiểm tra để đảm bảo độ an toàn cho mô hình;
- Khối lượng kiến thức ngoài ngành lớn nên trong thời gian ngắn khó có thể thiết kế chi tiết sao cho thực sự phù hợp;
- Thiếu kinh nghiệm thiết kế đúng chuyên môn để có thể hạn chế rủi ro xảy ra khi đưa vào chế tạo thực tiễn.
Chương VI: Đánh giá và kết luận GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 107
6.2 Hướng phát triển đề tài
Từ những vấn đề còn tồn đọng trên và hướng phát triển của đề tài này là theo hướng phát triển sâu hơn, đáp ứng nhu cầu về khảo sát môi trường nên ta 72 có các hướng phát triển sau:
- Chế tạo gia công cơ khí và lắp ráp chính xác USV để đảm bảo nó có thể hoạt động chính xác, đạt được khả năng tốc độ linh hoạt nhất;
- Tìm hiểu sâu hơn trong lĩnh vực tàu thủy USV để có thể đưa ra các phương án hạn chế rủi ro khi chế tạo và vận hành xuống mức tối thiểu;
- Tiếp tục tìm hiểu và phối hợp với bộ phận điện để đưa ra giải thuật điều khiển mới cho mô hình trong tương lai;
- Nghiên cứu nâng cao, tích hợp vào mô hình thêm những thiết bị có ứng dụng mang tính thực tiễn;
- Phát triển hoàn thiện để đi đến khả năng vận hành thực tiễn.
6.3. Kết luận
Luận văn tốt nghiệp thiết kế mô hình thuyền tự hành USV là một đề tài luận văn mang tính học thuật nghiên cứu dựa trên nền tảng khoa học là sự phát triển công nghệ của các phương tiện không người lái vận hành dưới nước.
Dựa trên những kiến thức hàn lâm, đề tài đã xây dựng thành công mô hình tàu USV 2 thân phục vụ tốt cho nhu cầu khảo sát và quan trắc môi trường nhằm đáp ứng nhu cầu thực tiễn và đề tài nghiên cứu khoa học đã đề ra.
Mặc dù vẫn còn nhiều sai sót về những con số do vấn đề thời gian và chuyên môn, nhưng đề tài đã thể hiện được tính học thuật và song song đó là tính thực nghiệm của mô hình được xây dựng. Trên cơ sở của các thuyết bền, lý thuyết về sức cản, lực nổi và các phương pháp tính toán cơ học khác. Khả năng đáp ứng về phần cứng cũng như về mặt cơ tính thì hầu như đã đủ để lắp đặt các thiết bị quan trắc và vận hành để khảo sát thực tiễn.
Chương VI: Đánh giá và kết luận GVHD: Lê Thanh Long
SVTH: Trang Thế Toàn 108
Mặt khác, với các thiết kế có thể dễ dàng tháo lắp và thay đổi đã tạo cho mô hình khả năng nâng cấp ứng dụng lâu dài và quy trì bảo trì thiết bị sau khi vận hành là tương đối đơn giản.
Bên cạnh đó, phương trình toán động lực học được dựa trên tài liệu khoa học và những bài báo khoa học chứng minh được rằng với lý thuyết tính về phương trình toán, ta có thể mô phỏng động lực học để thu thập những con số thí nghiệm và thông qua khả năng chế tạo mô hình thực tiễn cùng với khảo sát trên môi trường hiện thời. Ta có thể đưa ra được giải thuật điều khiển sao cho phù hợp và hoàn thiện nhất cho mô hình để đi đến khả năng thương mại hóa của đề tài nếu như nghiên cứu chế tạo thành công.









