ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ VÀ CHẾ TẠO BÀN CHUYỂN CẤP PHÔI XOAY
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ VÀ CHẾ TẠO BÀN CHUYỂN CẤP PHÔI XOAY
Chúng ta đang ở trong thời kỳ cách mạng công nghiệp 4.0 với nhiều đổi mới trên thế giới nói chung và nước Việt Nam nói riêng. Nó ảnh hưởng sâu sắc đến mọi mặt trong đời sống của chúng ta, mọi thứ đều phải dùng đến công nghệ và tự động hóa. Nhằm đáp ứng và theo kịp thế giới, tự động hóa ngày càng phát triển rộng rãi trong mọi lĩnh vực đặc biệt là trong ngành công nghiệp. Nền công nghiệp ảnh hưởng sâu sắc đến nền kinh tế của từng quốc gia chính vì thế các quốc gia trên thế giới hiện nay đang đẩy mạnh và phát triển tự động hóa vào nền công nghiệp nước nhà. Với mục đích thay thế nguồn nhân lực bằng hệ thống tự động hóa nhằm tăng năng suất và chất lượng sản phẩm. Hiện nay tại các nhà máy khâu cấp, chuyển phôi đa số còn dùng đến con người nên đề tài “ Bàn chuyển phôi xoay” là một đề tài mang tính cấp thiết. Đề tài mang lại cho chúng giải pháp thay thế con người trong nền công nghiệp hiện nay giúp cho chúng ta bắt kịp với nền công nghiệp thế giới.
Thông qua đề tài giúp cho sinh viên hiểu rõ công dụng và lợi ích của việc sử dụng bàn chuyển phôi xoay trong công nghiệp. Là tài liệu tham khảo cho sinh viên về cách vận hành và điều khiển driver động cơ AC SERVO. Mô hình bàn chuyển phôi xoay giúp cho sinh viên tiếp cận gần hơn với các dây chuyền sản xuất tự động tại các nhà máy.
Với kiến thức và kinh nghiệm còn hạn chế nên nhóm chúng em không thể tránh khỏi những ai sót trong thiết kế cũng như trong cách trình bày tính toán. Chúng em rất mong sự thông cảm và chỉ bảo của các quý thầy cô để đồ án chúng em hoàn thiện và tốt hơn.
LỜI MỞ ĐẦUTRANG2
CHƯƠNG 1 – TỔNG QUAN VỀ BÀN CHUYỂN PHÔI XOAY
1.1. BÀN XOAY CHUYỂN PHÔI ĐƯỢC DÙNG TRONG QUÁ TRÌNH CHIẾC RÓT VÀ ĐÓNG NẮP CHAI:8
1.2 BÀN XOAY DÙNG TRONG QUÁ TRÌNH GIA CÔNG:9
1.2.1. QUÁ TRÌNH TARO ĐAI ỐC:9
1.2.2. BÀN XOAY SỬ DỤNG TRONG MÁY GIA CÔNG TỰ ĐỘNG:10
1.2.3. QUÁ TRÌNH TÔI CAO TẦNG:11
1.3. BÀN XOAY CHUYỂN PHÔI ỨNG DỤNG TRONG QUÁ TRÌNH LẮP RÁP SẢN PHẨM:12
1.4. BÀN XOAY CHUYỂN PHÔI ĐƯỢC ỨNG DỤNG TRONG QUÁ TRÌNH KIỂM TRA SẢN PHẨM:13
1.5. BÀN XOAY CNC:14
CHƯƠNG 2 – LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ
2.1. CÁC PHƯƠNG ÁN CHẾ TẠO BÀN XOAY:17
2.1.1. BÀN CHUYỂN PHÔI XOAY KHÍ NÉN:17
2.1.2. BÀN CHUYỂN PHÔI XOAY SỬ DỤNG KẾT CẤU CAM VÀ ĐỘNG CƠ:18
2.1.3. BÀN XOAY TÁCH CHUYỂN PHÔI SỬ DỤNG HỘP GIẢM TỐC TRỤC VÍT BÁNH VÍT KẾT HỢP VỚI ĐỘNG CƠ AC SERVO::Error! Bookmark not defined.
2.1.4. ĐỐI TƯỢNG ĐƯỢC GIA CÔNG (PHÔI):21
2.2. LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ ĐỘNG LỰC, ĐIỀU KHIỂN VÀ CƠ KHÍ:21
2.2.1. LỰA CHỌN ĐỘNG CƠ:21
2.2.1.1 ĐỘNG CƠ DC KÍCH TỪ SONG SONG:21
2.2.1.2 ĐỘNG CƠ TUYẾN TÍNH:22
2.2.1.3. ĐỘNG CƠ BƯỚC:22
2.5.1.4. ĐỘNG CƠ SERVO:23
2.3. LỰA CHỌN PHƯƠNG ÁN ĐIỀU KHIỂN CHO ĐỘNG CƠ:24
2.3.1. ĐIỀU KHIỂN BẰNG RƠ-LE:24
2.3.2. ĐIỀU KHIỂN BẰNG ARDUINO:24
2.3.3. ĐIỀU KHIỂN BẰNG PLC:24
2.4. LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ CƠ KHÍ:24
2.4.1. KHUNG MÁY:24
2.7.1.1 KHUNG SẮT:24
2.4.2. CƠ CẤU TRUYỀN ĐỘNG:25
2.4.2.1. BỘ TRUYỀN TRỤC VÍT – BÁNH VÍT:25
2.3. KẾT LUẬN PHƯƠNG ÁN THIẾT KẾ:25
CHƯƠNG 3 – TÍNH TOÁN CƠ KHÍ VÀ TRUYỀN ĐỘNG CỦA BÀN CHUYỂN CẤP PHÔI XOAY
3.1. TÍNH TOÁN THIẾT KẾ BỘ TRUYỀN TRỤC VÍT – BÁNH VÍT:27
3.1.1.TÍNH TOÁN VẬN TỐC VÀ GIA TỐC CẦN THIẾT:27
3.1.2. MOMENT QUÁN TÍNH TẠI TRỤC:28
3.1.3. CÔNG SUẤT CẦN THIẾT CỦA ĐỘNG CƠ :29
3.2. TÍNH TOÁN N, N, U BỘ TRUYỀN ĐỘNG:30
3.2.1. CHỌN ĐỘNG CƠ:30
3.2.2. TÍNH CÔNG SUẤT TRÊN CÁC TRỤC:30
3.2.3. TÍNH SỐ VÒNG QUAY:31
3.2.4. TÍNH MOMENT TRÊN CÁC TRỤC:31
3.3. THIẾT KẾ BỘ TRUYỀN TRỤC VÍT BÁNH VÍT:32
3.3.1. TÍNH TOÁN THIẾT KẾ:33
3.3.2. ĐỊNH ỨNG SUẤT CHO PHÉP:33
3.3.3. ỨNG SUẤT UỐN CHO PHÉP:34
3.3.4. ĐỊNH CÁC KÍCH THƯỚC BỘ TRUYỀN :35
3.3.5. TÍNH TOÁN LẠI ỨNG SUẤT CHO PHÉP:36
3.4. THIẾT KẾ TRỤC:38
3.4.1. TRỤC CỦA TRỤC VÍT:38
3.4.1.1. LỰC TÁC DỤNG LÊN BỘ TRUYỀN TRỤC VÍT:38
3.4.1.2. XÁC ĐỊNH ĐƯỜNG KÍNH SƠ BỘ TRỤC THEO CÔNG THỨC:39
3.4.1.3. LỰC TỪ KHỚP NỐI TÁC DỤNG LÊN TRỤC:40
3.4.1.4. TA CÓ BIỂU ĐỒ NỘI LỰC NHƯ SAU:40
3.4.2. KIỂM TRA ĐIỀU KIỆN BỀN CỦA TRỤC VÍT:42
3.4.2.1. TÍNH MOMENT UỐN TỔNG VÀ MOMENT UỐN TƯƠNG ĐƯƠNG:42
3.4.2.2. XÁC ĐỊNH CHÍNH XÁC ĐƯỜNG KÍNH TRỤC:42
3.4.2.3. CHỌN VÀ KIỂM NGHIỆM THEN:43
3.4.3. TRỤC BÁNH VÍT:46
3.4.3.1. LỰC TÁC DỤNG LÊN BỘ TRUYỀN BÁNH VÍT:46
3.4.3.2. XÁC ĐỊNH ĐƯỜNG KÍNH SƠ BỘ TRỤC THEO CÔNG THỨC:46
3.4.3.3. TA CÓ BIỂU ĐỒ NỘI LỰC NHƯ SAU:48
3.4.4. KIỂM TRA ĐIỀU KIỆN BỀN CỦA BÁNH VÍT:50
3.4.4.1. TÍNH MOMENT UỐN TỔNG VÀ MOMENT UỐN TƯƠNG ĐƯƠNG:50
3.4.4.2. XÁC ĐỊNH CHÍNH XÁC ĐƯỜNG KÍNH TRỤC:50
3.4.4.3. CHỌN VÀ KIỂM NGHIỆM THEN:51
3.5. TÍNH TOÁN Ổ LĂN:55
3.5.1. TÍNH TOÁN Ổ LĂN TRÊN TRỤC VÍT:55
3.5.2. TÍNH Ổ LĂN TRÊN TRỤC BÁNH VÍT:59
3.6. CHỌN KIỂU LẮP Ổ LĂN:62
3.6.1. BÔI TRƠN Ổ LĂN:62
3.6.2. CHE KÍN Ổ LĂN:63
3.7. CHỌN KHỚP NỐI TRỤC:64
3.8. THIẾT KẾ VỎ HỘP GIẢM TỐC:65
3.8.1. YÊU CẦU:65
3.8.2. CHỌN KẾT CẤU:67
3.8.3. BÔI TRƠN:67
3.8.4. ĐIỀU CHỈNH ĂN KHỚP:67
3.9. DUNG SAI LẮP GHÉP:67
3.10. TÍNH TOÁN VÀ CHỌN XYLANH CHO TAY GẮP:71
3.10.1. XÁC ĐỊNH PHẦN TỬ TAY GẮP:71
3.10.2. CHỌN LOẠI XYLANH:71
3.10.3. TÍNH CHỌN XYLANH:71
3.10.3.1. XYLANH A: (KẸP SẢN PHẨM)72
3.10.3.2. XYLANH B: (ĐƯA MỎ KẸP XUỐNG)73
3.10.3.3. XYLANH C: (CHUYỂN ĐỘNG XOAY)75
3.10.3.4. CHỌN BỘ CHỐNG XOAY ĐỂ GẮN VÀO XY LANH C77
3.10.3.5. XYLANH D: (XYLANH XOAY)77
3.10.4. TÍNH TOÁN VAN PHÂN PHỐI:79
3.10.5. TÍNH TOÁN LỰA CHỌN MÁY NÉN KHÍ CHO TAY GẮP:80
3.10.6. TÍNH TOÁN CHỌN DÂY KHÍ NÉN:81
3.10.7. CHỌN ĐẦU NỐI NHANH KHÍ NÉN:82
CHƯƠNG 4 – TÍNH TOÁN THIẾT KẾ ĐIỆN CỦA BÀN CHUYỂN PHÔI XOAY
4.1. SƠ ĐỒ HỆ THỐNG ĐIỀU KHIỂN CỦA BÀN CHUYỂN PHÔI XOAY:83
4.2. NGUỒN DẪN ĐỘNG CỦA BÀN CHUYỂN PHÔI XOAY:83
4.3. MẠCH DRIVER:87
4.5. ĐIỀU CHỈNH DRIVER AC SERVO:89
4.5.1. CÁC TẬP LỆNH CƠ BẢN CỦA DRIVER:89
4.5.2. CÁCH CÀI ĐẶT THÔNG SỐ:90
4.5.3. THIẾT LẬP BIẾN VẬN HÀNH VỊ TRÍ:91
4.5.4. THIẾT LẬP BIẾN VẬN HÀNH TỐC ĐỘ:91
4.5.4. THIẾT LẬP BIẾN VẬN HÀNH MOMENT:91
4.6. BỘ ĐIỀU KHIỂN:92
4.7. CẢM BIẾN:92
4.7.1. CẢM BIẾN PHÁT HIỆN BÀN XOAY ĐÚNG VỊ TRÍ:92
4.7.2. CẢM BIẾN PHÁT HIỆN PHÔI:93
4.8. BỘ ĐIỀU KHIỂN BÀN XOAY:94
4.9. XÁC ĐỊNH CHỌN MCB, CẦU CHÌ, DÂY DẪN:96
4.9.1. CHỌN CẦU CHÌ:97
4.6.2. CHỌN MCB:98
4.6.3. CHỌN DÂY DẪN CHO MẠCH ĐỘNG LỰC:98
4.9. LƯU ĐỒ GIẢI THUẬT99
4.10. CHƯƠNG TRÌNH MẪU:100
CHƯƠNG 5 – THI CÔNG MÔ HÌNH
5.1. CHẾ TẠO VÀ LẮP ĐẶT BÀN CHUYỂN PHÔI XOAY:102
5.1.1. CHẾ TẠO KHUNG BÀN XOAY:102
5.1.2. GIA CÔNG MẶT TRÊN KHUNG BÀN XOAY LẮP KHUNG VÀ MẶT ĐỘNG CƠ:103
5.1.3. CHẾ TẠO GIÁ DỠ VÀ ĐỊNH VỊ CẢM BIẾN:104
5.1.4. LẮP RÁP TRỤC ĐỘNG CƠ, THEN VÀ LỖ BÀN XOAY:105
5.1.4.1. CHẾ TẠO PHÔI:107
5.1.4.2. CƠ CẤU ĐỊNH VỊ PHÔI:107
5.2. KẾT NỐI VÀ LẮP ĐẶT BỘ ĐIỀU KHIỂN:107
5.2.1. LẬP TRÌNH ĐIỀU KIỂN HỆ THỐNG:108
5.2.2. CHẾ TẠO KHUNG CHO TAY GẮP VÀ BÀN XOAY:109
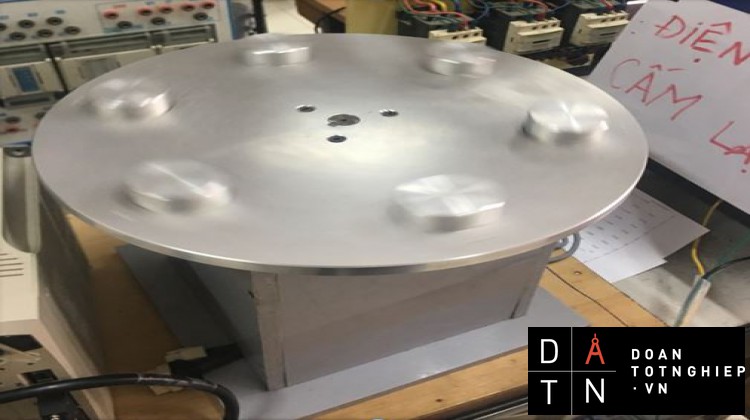
5.3. KIỂM TRA KẾT CẤU HỆ THỐNG BÀN XOAY VÀ CHẠY THỬ NGHIỆM:110
5.4. HOÀN THIỆN MO HINH VÀ ĐƯA VÀO SƯ DỤNG:111
CHƯƠNG 6 – TỔNG KẾT ĐÁNH GIÁ VÀ HƯỚNG PHÁT TRIỂN ĐỒ ÁN
6.1. LUẬN VĂN GIẢI QUYẾT ĐƯỢC CÁC VẤN ĐỀ:112
6.2. VẤN ĐỀ CÒN LẠI CỦA LUẬN VĂN:112
6.3. ĐỀ XUẤT PHƯƠNG HƯỚNG PHÁT TRIỂN:112
CHƯƠNG 1 – TỔNG QUAN VỀ BÀN CHUYỂN PHÔI XOAY
Bàn chuyển phôi xoay được dùng phổ biến trong công nghiệp, trong các dây chuyền sản xuất tự động. Với nhiều chức năng khác nhau như:
Hình 1.1 Chiết rót theo chuyển động tròn bằng bàn xoay
Hình 1.2 Kết hợp nhiều bàn xoay với nhau để cấp chai
Ta thường thấy trong các dây chuyền chiếc rót và đóng nắp chai tự động bàn xoay chuyển tách phôi thường được dùng phổ biến. Nhằm tách phôi và chuyển đến nơi chiết rót, đóng nắp một cách chính xác với hiệu suất cao nhất.
Với dạng chiếc rót trong chai nhỏ dùng bàn xoay mang lại lợi ích vô cùng lớn, chúng ta có thể chiết rót cùng 1 lúc nhiều chai mang lại năng suất cao. Sau quá trình chiết rót là quá trình đóng nắp chai, bàn xoay được dùng để chuyển chai đến vị trí vặn nắp chai.
- Trong quá trình gia công chi tiết thường trải qua nhiều công đoạn khác nhau nên sử dụng bàn chuyển phôi xoay là hết sức cần thiết.
- Nó mang lại nhiều lợi ích vô cùng lớn vì thông thường cùng một lúc chỉ có thể gia công một chi tiết nên cần phải tách chuyển phôi để chi tiết đến vị trí gia công.
- Bàn chuyển phôi xoay có thể chia nhiều vị trí trên bàn xoay nên có thể làm nhiều công đoạn cùng một lúc ta thường thấy kiểu này thường áp dụng trong máy gia công vạn năng.
Hình 1.3 Gia công ngay trên bàn xoay
Hình 1.4 Bàn xoay tạo sự linh hoạt trong quá trình chuyển phôi qua nhiều cơ cấu
Trong quá trình taro bàn xoay có chức năng tách phôi và chuyển phôi đến đúng vị trí để taro một cách chính xác và nhanh chóng mang lại hiệu quả cao.
Hình 1.5 Mỗi vị trí trên bàn làm một nguyên công khác nhau
Bàn xoay được dùng với chức năng chứa đồ gá phôi và đồng thời chuyển phôi đến các vị trí gia công khác nhau. Bàn xoay được kết nối và phối hợp với cụm gia công để thực hiện quá trình gia công chi tiết một cách nhịp nhàng và chính xác.
Hình 1.6 Gia nhiệt và tưới dung dịch ngay trên bàn xoay tôi cao tầng
Trong quá trình tôi cao tầng bàn chuyển phôi xoay được dùng để gá chi tiết và chuyển chi tiết đến từng công đoạn khác nhau của quá trình.
Bao gồm các công đoạn như:
1) Làm chi tiết nóng đến nhiệt độ cao bằng tần số lớn
2) Rồi chuyển phôi đến vị trí làm nguội nhanh
3) Tiếp theo là sấy khô chi tiết.
Phương pháp này thường được dùng để xử lý nhiệt đối với các chi tiết chịu lực cao nhằm tăng độ cứng và chống mài mòn của chi tiết.
Hình 1.7 Bàn xoay chuyển phôi ứng dụng trong quá trình lắp ráp sản phẩm
Trong nền công nghiệp hiện nay máy móc đang dần thay thế con người nên việc sử dụng máy móc trong khâu lắp ráp chi tiết không còn xa lạ gì. Quá trình lắp ráp trải qua nhiều công đoạn để lắp chi tiết lại với nhau trong đó bàn chuyển phôi xoay là giải pháp hiệu quá nhất. Vi khi dung bàn chuyển phôi xoay ta có thể bố trí xung quanh nhiều công đoạn lắp ráp với nhiều chi tiết khác nhau một các dễ dàng, trong một diện tích nhỏ.
Hình 1.8 Quá trình kiểm tra sản phẩm
Kiểm tra sản phẩm là công đoạn vô cùng quan trọng thông thường công đoạn này cần đến nguồn nhân lực nhưng với nền công nghiệp hiện nay. Với sự ra đời của công nghệ xử lý ảnh thì việc kiểm tra sản phẩm có thể tự động hóa hoàn toàn, hiệu suất và độ tin cây vô cùng cao.
Trong quá trình kiểm tra sản phẩm bàn xoay chuyển phôi có chức năng tách từng phôi riêng biệt rồi từ đó chuyển đến vị trí kiểm tra. Công nghệ xử lý ảnh sẽ kiểm tra sản phẩm theo yêu cầu nếu sản phẩm không đạt yêu cầu bàn xoay sẽ đưa sản phẩm đến vị trí và loại bỏ chúng.
Nhằm mở rộng khả năng công nghệ của máy công cụ, nhất là cho các máy CNC 2 hoặc 3 trục, người ta đã chế tạo một thiết bị có khả năng tăng số trục của máy từ 2 hoặc 3 trục thành các máy 4 hoặc 5 trục. Thiết bị đó chính là bàn xoay (Rotory Table). Thực ra bàn xoay chẳng qua là một loại đồ gá đặc biệt và chúng chủ yếu được sử dụng trên các máy phay CNC, trung tâm gia công đứng, trung tâm gia công ngang và máy doa ngang.
Là loại bàn xoay dùng để gá đặt chi tiết sao cho tâm của chi tiết trùng với tâm trục chính. Có thể gia công được nhiều dạng bề mặt khác nhau như gia công mặt phẳng, gia công rãnh thẳng hoặc rãnh xoắn và gia công các mặt định hình với dao định hình, đôi khi dùng để cắt bánh răng với dao phay môđun.
Loại bàn xoay tiêu chuẩn có thể phân ra làm hai loại:
- Loại có trục chính nằm ngang.
- Loại có trục chính thẳng đứng.
Loại bàn xoay có động cơ lắp phía sau:
- Loại bàn xoay này có khả năng hạn chế sự rung động khi máy đang làm việc.
- Loại động cơ này có thể che chắn nước và phôi vụn, không cho chúng rơi vào động cơ.
Loại bàn xoay có lỗ trục chính lớn:
Loại bàn xoay này có trục chính có lỗ lớn, dùng để gia công các phôi dài hoặc các ống. Kích thước lỗ trục chính của chúng có khả năng được mở rộng để mở rộng phạm vi làm việc cho máy. Loại này thích hợp cho việc sản xuất hàng khối. Tương tự như loại bàn xoay tiêu chuẩn, loại bàn xoay này cũng loại trục chính nằm ngang và loại trục chính thẳng đứng.
Hình 1.9 Bàn xoay có lỗ trục chính lớn.
Hình 1.10 Bàn xoay 4 trục chính
Loại bàn xoay có nhiều trục chính:
Loại bàn xoay nhiều trục chính cho phép gá đặt cùng lúc nhiều chi tiết. Loại bàn xoay nhiều trục chính có năng suất gấp nhiều lần so với loại bàn xoay tiêu chuẩn, thích hợp cho sản xuất hàng loạt và hàng khối.
Loại bàn xoay nghiêng:
Hình 1.11 Bàn xoay CNC điều khiển nghiêng bằng tay.
Loại bàn xoay này có hai trục. Bàn xoay có thể nghiêng đi nhờ xoay quanh được một trục nào đó. Do đó loại này có khả năng công nghệ cao, có thể gia công các bề mặt nghiêng ở nhiều góc độ khác nhau. Loại bàn xoay này được phân ra hai loại như sau:
Loại điều khiển nghiêng tự động: cả hai trục của bàn xoay được điều khiển hoàn toàn tự động từ hệ thống CNC.
Loại điều khiển nghiêng bằng tay: chuyển động làm nghiêng trục được thực hiện bằng tay.
Loại cỡ lớn:
Ngoài các loại nêu trên, các nhà sản xuất bàn xoay còn chế tạo loại bàn xoay có kích thước bàn từ 1m đến 3m hoặc lớn hơn. Loại bàn xoay này có trục chính thẳng đứng hoặc nằm ngang với độ chính xác cao. Chúng được dùng để gia công các chi tiết lớn, nặng (có thể lên đến 10.000kg) và cho các ứng dụng về đo lường.
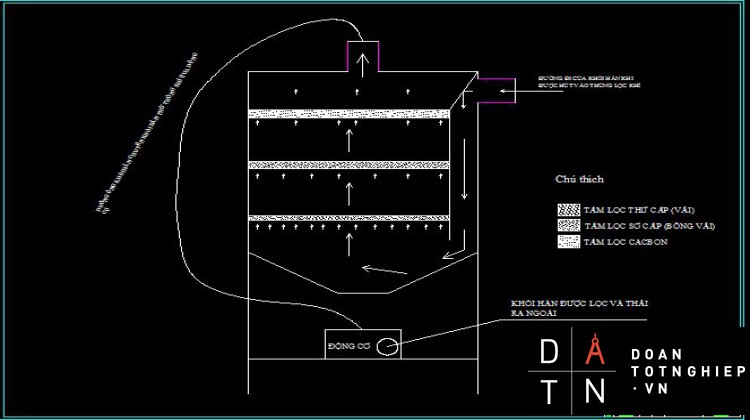
Bàn xoay dạng này dùng nguồn động lực từ khí nén và điều khiển dựa trên việc diều khiển van khí nén.
- Nguyên lý hoạt động:
Hình 2.1 bàn xoay khí nén
- Xi lanh chính kéo về tạo chuyển động xoay cho cụm bàn xoay (chốt đang gắn vào lỗ kéo chuyển động cho bàn xoay).
- Chạm cảm biến tác động vào xy lanh khóa, xy lanh đẩy chốt lên.
- Hết hành trình xy lanh khóa xy lanh chính tiến tạo chuyển động xoay ngược cho cụm bàn xoay (chốt không gắn vào lỗ nên bàn xoay đứng yên).
- Cụm chốt trở về vị trí ban đầu để tiếp tục chu trình.
Có thể cài đặt quá trình xoay và số vị trí bằng timer và bu lông dừng bàn xoay.
Ưu điểm:
Đáp ứng nhanh, dễ vận hành và sửa chữa, có thể dùng trong môi trường có nhiều nước.
Hoàn toàn không bị rò rỉ nên hệ thống có khả năng hoạt động hiệu quả và tiết kiệm chi phí hơn.
Có thể sử dụng với không khí không cần bôi trơn.
Ống dẫn hướng của xi lanh được bít kín hoàn toàn nên các chất bụi bẩn không thể lọt vào trong hệ thống giúp cho xi lanh hoạt động được lâu bền hơn, hạn chế ma sát, mài mòn.
Nhược điểm:
Xi lanh khí nén loại không có thanh đẩy không chịu được lực đẩy và áp suất quá cao. Nếu áp suất và lực đẩy cao hơn 1.6 lần so với lực đẩy tối đa thì có thể khiến cho bộ phận trượt bị ngắt rời khỏi khớp nối. Tuy nhiên việc lắp lại cũng khá đơn giản và dễ dàng.
Chỉ dùng cho những có tải trọng thấp, độ chính xác không cao.
Ứng dụng trong công nghiệp:
Bàn xoay cấp chuyển phôi xoay khí nén thường được dùng trong quá trình chiếc rót, đóng nắp chai tự động.
Dùng trong máy gia công cơ khí như taro tự động, tôi cao tầng, gia công chi tiết....
Chính vì vậy phương án này không phù hợp.
Bàn xoay dạng này hoạt động dựa trên nguyên lý của kết cấu cam, các góc quay dựa trên thiết kế của cơ cấu cam.
Nguyên lý hoạt động:
Cơ cấu cam là một loại cơ cấu khớp cao dùng để truyền chuyển động. Có thể tạo nên chuyển động quay có điểm dừng theo 1 quy luật cho trước của khâu bị dẫn.
Trong cơ cấu cam, cam và cần được nối với giá bằng khớp quay và nối với nhau bằng khớp cao. Thông thường cam nối với giá bằng khớp quay, khi cần nối với giá bằng khớp trượt ta được cơ cấu cam cần đẩy, cần khi đó sẽ chuyển động xoay có chu kỳ.
Các thông số cơ bản của cam gồm có khâu dẫn, các góc công nghệ, độ lệch tâm và các góc định kì.
Hình 2.2 Bàn xoay cam thùng
Ưu điểm:
Truyền động chính xác.
Bền và ổn định, chi phí thấp, chi phí bảo trì thấp…
Thay thế các bộ truyền động phức tạp,đắt tiền.
Chịu tải và khả năng tốc độ cao.
Đơn giản dễ thiết kế chỉ cần thiết kế biên dạng thích hợp thì khâu bị dẫn chuyển động theo bất kỳ quy luật nào cho trước.
Nhược điểm:
Gây ồn, rung động, mài mòn.
Gia công biên dạng khó hành trình của khâu bị dẫn động không quá lớn.
Việc thiết kế và chế tạo biên dạng cam là rất khó, không thể làm đơn chiếc
Ứng dụng trong công nghiệp:
Thường dùng trong gia công chi tiết tự động với nhiều nguyên công khác nhau.
Dùng trong quá trình lắp ráp sản phẩm.
Dùng trong quy trình kiểm tra sản phẩm tự động.
Chính vì vậy phương án này không phù hợp.
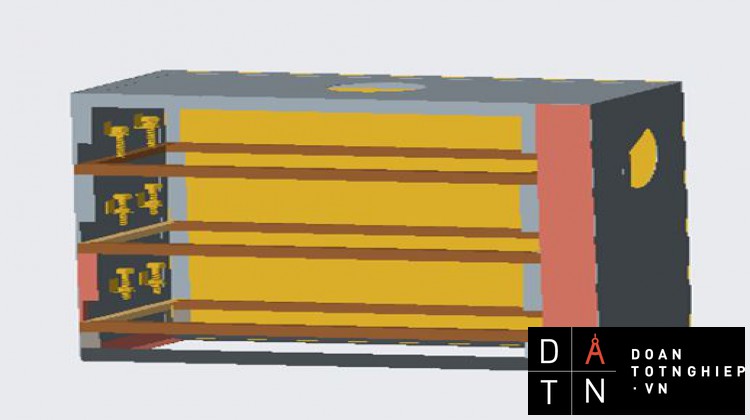
- Dùng hộp giảm tốc trục vít bánh vít:
Hình 2.3 Bàn xoay servo kết hợp hợp hộp giảm tốc
- Có một số ưu điểm sau:
Tỉ số truyền lớn nhưng cấu tạo lại nhỏ gọn thích hợp lắp đặt cho những nơi cần công suất lớn nhưng vị trí lại hẹp.
Có khả năng tự hãm, làm việc êm.
- Có một số nhược điểm sau:
Hiệu suất thấp, sinh nhiệt nhiều.
Giá thành cao, yêu cầu lắp ghép với độ chính xác cao.
- Dùng động cơ AC Servo:
- Có một số ưu điểm như sau:
Hoạt động êm, rung động thấp.
Có thể điều khiển vị trí, tốc độ, moment của động cơ tùy vào từng yêu cầu khác nhau. Nhận và gởi tín hiệu về bộ điều khiển. Động cơ có thể kết nối với nhiều thiết bị điều khiển như: PLC, CNC, Motion Controller, OP Unit, Exclusive Controller.
- Nhược điểm cơ bản của động cơ Servo so với động cơ bước là:
Chi phí cao.
Không làm việc ở chế độ mạch điểu khiển hờ, yêu cầu phải có hệ thống phản hồi.
Yêu cầu phải điều chỉnh các thông số vòng điều khiển.
Bảo dưỡng tốn kém hơn. đặc biệt là động cơ DC servo.
Phương án này rất phù hợp với mục đích của đề tài.
Kích thức phôi: Φ40mm x 20mm.
Chất liệu phôi: thép không gỉ.
Bàn xoay có 6 vị trí.
Năng suất: 100 sản phẩm một giờ.
Hình 2.4 Phôi
Đối với nguồn dẫn động của bàn xoay kéo tải không đổi trong suốt quá trình vận hành và các động cơ hoạt động ở tốc độ thấp với độ chính xác cao và cần moment không đổi khi tốc độ thay đổi. Chính vì vậy có một số nguồn dẫn động thích hợp như sau:
Hình 2.5 đặc tính cơ của động cơ DC kích từ song song
Hình 2.5 thể hiện đặc tính cơ của động cơ DC kích từ song song ta có thể thấy một số ưu điểm nổi bật của loại động cơ này: Moment hầu như không đổi so với tốc độ, ở tốc độ thấp moment của động DC kích từ song song này lớn, nguồn cấp DC an toàn cho người sử dụng hơn so với AC. Nhưng chúng ta sẽ không sử dụng loại động cơ này do khả năng đảo chiều khó khăn hơn và dòng điện tại lúc đảo chiều lớn hơn rất nhiều so với dòng định mức và đặc biệt không thể đảo chiều ở tốc độ cao. Chính vì vậy loại động cơ này không thích hợp làm nguồn dẫn động của bàn xoay.
2.2.1.2 ĐỘNG CƠ TUYẾN TÍNH:
Hình 2.6 đặc tính cơ của động cơ tuyến tính
Ở động cơ tuyến tính có những đặc điểm thích hợp để làm nguồn dẫn động bàn xoay do định vị rất nhanh và chính xác, không có độ rơ khi đảo chiều vì không có trục máy. Nhưng ta không dùng đến loại động cơ này do khá đắt đỏ, chi phí theo máy lớn .
Hình 2.7 Đặc tính cơ của động cơ bước
|
Hình 2.8 Đặc tính cơ của động cơ servo |
Hình 2.3 thể hiện đặc tính cơ của động cơ bước, đối với động cơ bước thì nó có nhiều điểm tương đồng với động cơ servo nhưng điều khiển vòng hở còn Servo là điều khiển vòng kín nên ta cũng không sử dụng động cơ bước.
Hình 2.4 thể hiện đặc tính cơ của động cơ AC servo đây là loại động cơ lý tưởng để truyền động cho bàn xoay do các tính năng nổi bật của nó như: dễ dàng đảo chiều ngay lập tức, khả năng tạo ra moment lớn, điều khiển chính xác vị trí mong muốn, làm việc êm.
Một số đặc tính nổi bật của động servo :
Động cơ servo là loại động cơ không chổi than.
Động cơ servo quay với tốc độ ổn định trong tầm moment của động cơ.
Điều khiển vị trí vòng kín chúng ta có thể đếm xung kích ở động cơ để xác định vị trí mà không cần phải có cảm biến hồi tiếp vị trí.
Động cơ AC servo có thể giữ được trục quay của nó, so với động cơ DC không có hộp số thì moment giữ của động cơ servo lớn hơn rất nhiều.
Động cơ servo đáp ứng tốt khi khởi động, dừng lại và đảo chiều quay một cách dễ dàng.
Chính vì vậy đây là loại động cơ thích hợp để làm nguồn dẩn động.
Rơ-le cơ khí cho phép ta điều khiển được các thiết bị một cách dễ dàng và tự động ngoài ra chi phí đầu tư không quá cao như PLC, vi xử lý nhưng nhược điểm của rơ-le là chỉ thực hiện 1 chức năng hay 1 nhiệm vụ được sắp xếp ban đầu muốn thay đổi ta phải làm lại từ đầu hoặc thậm chí thay đổi cả 1 hệ thống . Chính vì vậy đối với bàn xoay nó không phù hợp do chạy phức tạp, điều khiển tốc độ và đảo chiều đáp ứng chậm, đặc biệt khi thay đổi chương trình hay muốn chạy vị trí khác vô cùng phức tạp.
Vi xử lý ngày nay được sử dụng vô cùng rộng rãi , sự phát triển của vi xử lý ngày nay cho phép chúng ta có thể thực hiện được nhiều việc tự động ngang bằng với khả năng xử lý của PLC đời cũ nhưng kích thước nhỏ gọn hơn rất nhiều và giá thành cũng giảm xuống, các module chuyên dụng hỗ trợ công việc của vi xử lý làm các vi xử lý hoạt động tốt hơn và linh hoạt hơn. Nhưng trong công nghiệp thì khả năng chống nhiễu của arduino rất kém. Khi cần độ chính xác cao thì không thể chọn Arduino.
PLC cho phép ta điều khiển tốt các thiết bị trong công nghiệp và bàn xoay cũng không ngoại lệ, ở đây ta dùng PLC để điều khiển động cơ bước tạo thành chuyển động trong bàn xoay.
Ưu điểm khi điều khiển bằng PLC :
PLC có khả năng chống nước, chống bụi bẩn, nhiễu tốt hơn so với vi xử lý.
Thay đổi dễ dàng chương trình.
Công suất tiêu thụ thấp.
Giảm thiểu số lượng timer, couter. Giảm được số lượng dây dẫn.
Nên PLC là lựa chọn tối ưu nhất.
Mục đích của việc lựa chọn phương án thiết kế cơ khí là đưa ra các phương án thiết kế cơ khí cho từng bộ phận với từng mục đích cụ thể đồng thời cân nhắc về tính kinh tế trong phạm vi thiết kế cho máy.
Mục đích của việc lực chọn thiết kế khung máy:
Đảm bảo độ cứng vững cho máy.
Đảm bảo cho bộ phận của máy làm việc ổn định và chính xác.
Khung sắt được sử dụng rộng rãi trong các lĩnh vực sản xuất với một số ưu điểm:
Khả năng chịu va đập tốt, giá thành rẻ, dễ gia công.
Linh hoạt trong lắp ráp, chế tạo.
Có thể chống chịu trong mọi điều kiện môi trường như: nhiệt độ cao, không khí ẩm ướt.
Mục đích của việc lựa chọn phương án thiết kế truyền động đảm bảo cho trục khi quay ổn định và chính xác.
Truyền động trục vít gồm trục vít và bánh vít ăn khớp với nhau. Nó được dùng để truyền động giữa các trục chéo nhau, góc giữa 2 trục thường là 90°.
Do các trục chéo nhau như vậy nên trong chuyển động trục vít xuất hiện vận tốc trượt với hướng dọc theo ren trục vít, như vậy đó làm tăng mất mát về ma sát, làm giảm hiệu suất, tăng nguy hiểm về dính và mòn. Vì vậy đặc điểm này cần được chú ý trong quá trình thiết kế truyền động trục vít.
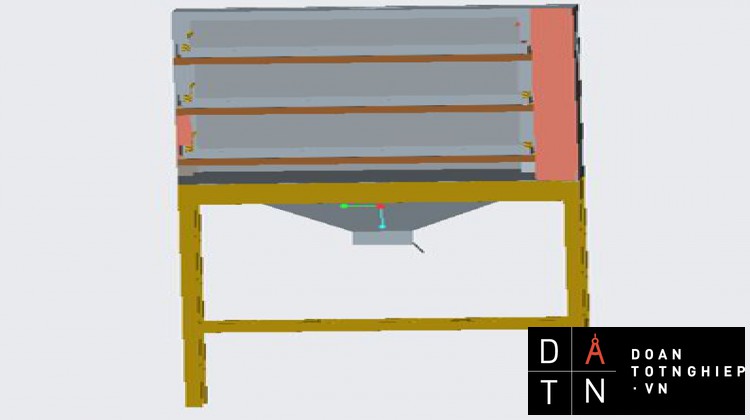
Sơ đồ nguyên lý:
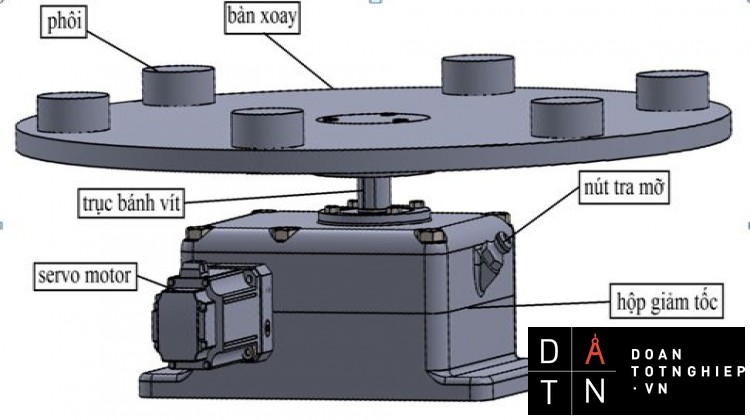
Hình 2.9 Cấu tạo bàn xoay
Ưu điểm:
Làm việc êm, không ồn.
Có khả năng tự hãm.
Có độ chính xác động học cao.
Nhược điểm:
Hiệu suất thấp, sinh nhiệt nhiều do có vận tốc trượt lớn.
Vật liệu chế tạo bánh vít làm bằng kim loại màu để giảm ma sát nên khá đắt tiền.
Mô hình trong luận văn lựa chọn phương án thiết kế phân nhóm như sau:
- Phần cơ khí
Sử dụng hộp giảm tốc trục vít bánh vít cho cơ cấu truyền.
Sử dụng động cơ AC servo để tạo chuyển động cho bàn xoay.
- Phần điều khiển.
Sử dụng PCL để điều khiển driver servo.
Hình 3.1 Bàn xoay.
Ta có:
Năng suất 100 sp/giờ
Thời gian nghỉ 35s mỗi chu kỳ
Thời gian bàn xoay vận hành trong 1 giờ:
tvh = 3600 – (35 x 100) = 100 s = 1,667 (phút)
Với bàn xoay 6 vị trí nên ta có số vòng quay trong 1 giờ là:
(vòng)
Tốc độ quay trong một phút:
Chu vi của bàn xoay:
Chiều dài quay trong 1 giờ là:
D1h = P . Nvong . 16,66 . 0,4π = 20,94 (m)
Vận tốc dài của bàn xoay:
(m/s)
Gia tốc góc tại tâm:
Hình 3.2 Bàn xoay, phôi, trục.
Ta có:
Từ thể tích và khối lượng riêng của vật liệu thép (7850kg/m3)
Khối lượng của bàn:
Khối lượng của trục:
Khối lượng của 6 phôi:
Moment quán tính của bàn:
Moment quán tính của trục:
Moment quán tính của phôi:
Moment quán tính tổng:
Moment lực tại trục:
Công suất tại trục làm việc:
Để chọn động cơ điện, cần tính công suất cần thiết. Nếu gọi N – công suất trên bàn xoay, η – hiệu suất chung, Nct – công suất cần thiết, thì :
(1.1)
Trong đó (1.2)
Tra bảng 3.3 [1], ta có :
η1 = 0,82 – hiệu suất bộ truyền trục vít.
η2 = 0,995 – hiệu suất của một cặp ổ lăn.
Ta có
Từ (1.2) ta được:
Từ (1.1) ta được:
Xác định số vòng quay làm việc
Chọn số vòng quay sơ bộ của động cơ
Theo bảng 3.2 [1], hộp giảm tốc trục vít – bánh vít một cấp utv = 30, do đó số vòng quay sơ bộ của động cơ :
Vì đây là động cơ AC servo nên tốc độ định mức luôn là 3000 vong/phut.
Để động cơ chạy 300 vg/ph thì giảm tốc điện tử của động cơ udt=10. Vì không phải là bộ giảm tốc thật nên moment là hằng số.
Ta sẽ tính số vòng quay sơ độ sao khi đã giảm tốc bằng điện tử nên ta cho vận tốc của động cơ là 300vg/ph:
Ta chọn sơ bộ động cơ dựa trên công suất và tốc độ:
ndc =300(vg/ph)
Dựa trên [6] calatogue ADP-SV của hãng LS động cơ APM-SA01A, bộ điều khiển ADP-SV01
ndm = 3000 (vg/ph)
Phân phối tỉ số truyền
Tỷ số truyền u hộp giảm tốc trục vít được chọn theo dãy số tiêu chuẩn:
|
Dãy 1 |
8; 10; 12,5; 16; 20; 25; 31,5; 40; 50; 63; 80 |
|
Dãy 2 |
9; 11,2; 14; 18; 22,4; 28; 35,5; 45; 56; 71 |
Ta chọn tỷ số truyền gần nhất với 30 là u=31,5
Tính lại tốc độ động cơ:
Tính các thông số trên trục
Công suất trên trục I là:
Công suất trên trục động cơ là:
Số vòng quay của động cơ là: ndc = 315 (vg/ph).
Số vòng quay của trục I là:
Số vòng quay trên trục công tác là
Moment xoắn trên trục động cơ là
Moment xoắn trên trục I là
Moment xoắn trên trục công tác là
Bảng hệ thống các số liệu tính được
|
Trục Thông số |
Động cơ |
I |
Công tác |
||||
|
u |
utv = 31,5 |
uk = 1 |
|||||
|
n (vg/ph) |
315 |
10 |
10 |
||||
|
N (kW) |
|
|
|
||||
|
T (N.mm) |
|
|
|
||||
Ta có bản [6] so sánh moment, tốc độ và công suất giữa yêu cầu và thực tế:
|
Các điều kiện |
Thực tế |
APM-SA01A |
||
|
n (vg/ph) |
315 |
3000 |
315 |
|
|
N (kW) |
|
0,1 |
0,1 |
|
|
T (N.mm) |
|
318,333 |
3031,75 |
|
Vậy APM-SA01A thỏa mãn các điều kiện .
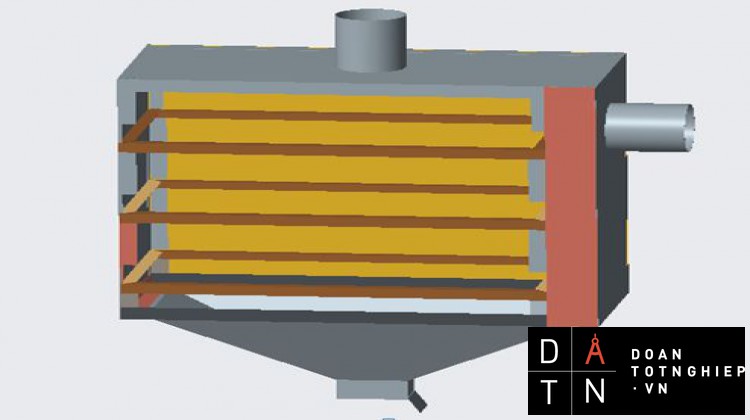
Hình 3.3 bộ truyền trục vít bánh vít
- Truyền động trục vít gồm trục vít và bánh vít ăn khớp với nhau. Nó được dùng để truyền động giữa các trục chéo nhau, góc giữa 2 trục thường là 90°.
- Do các trục chéo nhau như vậy nên trong chuyển động trục vít xuất hiện vận tốc trượt và hướng dọc theo ren trục vít, như vậy đó làm tăng mất mát về ma sát, làm giảm hiệu suất, tăng nguy hiểm về dính và mòn. Vì vậy đặc điểm này cần được chú ý trong quá trình thiết kế truyền động trục vít.
- Thiết kế truyền động trục vít bao gồm các bước sau:
Chọn vật liệu
Xác định ứng suất cho phép
Tính thiết kế
Tính kiểm nghiệm
Quyết định lần cuối các kích thước và thông số bộ truyền
Kiểm nghiệm về nhiệt
Tính toán truyền động trục vít - bánh vít.
Số liệu ban đầu
|
Công suất P (kW) |
|
|
|
Moment xoắn trục vít T1 (N.mm) |
|
|
|
Moment xoắn trục bánh vít T2 (N.mm) |
|
|
|
Số vòng quay trục vít n1 (vg/ph) |
10 |
|
|
Số vòng quay trục bánh vít n2 (vg/ph) |
315 |
|
|
Tỉ số truyền u |
31.5 |
Dự đoán vận tốc trượt theo công thức sau:
Tương ứng với vận tốc trượt vs = 0,01 m/s ta chọn cấp chính xác là 9 (bảng 7.4 [2])
Vì vs ≤ 0,01 m/s, tra bảng 7.8 [1], ta chọn vật liệu bánh vít là GX 28-48 đúc trong khuôn cát với σb = 500 MPa và σch = 200 MPa.
Chọn vật liệu cho trục vít là thép 40Cr tôi với độ rắn HRC ≥ 45, sau đó được mài và đánh bóng ren vít.






