HỆ THỐNG ĐIỀU KHIỂN THIẾT BỊ CƠ KHÍ THIẾT KẾ VÀ CHẾ TẠO HỆ THỐNG KHOAN DOA TỰ ĐỘNG





NỘI DUNG ĐỒ ÁN
PBL2: HỆ THỐNG ĐIỀU KHIỂN THIẾT BỊ
CƠ KHÍ
ĐỀ TÀI: THIẾT KẾ VÀ CHẾ TẠO HỆ THỐNG
KHOAN- DOA TỰ ĐỘNG
LỜI NÓI ĐẦU
Cùng với sự nỗ lực của nhiều ngành kĩ thuật trong công cuộc công nghiệp hóa và hiện đại hóa đất nước, ngành tự động hóa đang tự khẳng định mình trong vai trò nâng cao chất lượng và sản lượng sản xuất của nhiều ngành kinh tế.Tự động hóa đã mang lại hiệu quả kinh tế to lớn và đang là đòi hỏi của rất nhiều ngành sản xuất khác nhau.
Để đáp ứng nhu cầu này, đi đôi với công việc nghiên cứu, thiết kế là trang bị đầy đủ những kiến thức sâu rộng về hệ thống điều khiển và trang thiết bị cơ khí cũng như khả năng áp dụng lý luận khoa học thực tiễn sản xuất cho đội ngũ cán bộ khoa học kỹ thuật là không thể thiếu được.
Đề tài “THIẾT KẾ VÀ CHẾ TẠO HỆ THỐNG KHOAN DOA TỰ ĐỘNG” sử dụng các phần tử xilanh khí nén, công tắc hành trình, van khí nén, … thực hiện tất cả các quá trình cần thiết trong dây chuyền. Hệ thống làm việc bằng khí nén cho độ an toàn cao, vệ sinh môi trường tốt, đơn giản, hiệu quả mà kinh tế...
MỤC LỤC
LỜI NÓI ĐẦU.. I
MỤC LỤC.. II
DANH MỤC HÌNH ẢNH.. IV
CHƯƠNG 1. TỔNG QUAN VỀ ĐỀ TÀI NGHIÊN CỨU.. 1
1.1. Giới thiệu chung. 1
1.1.1. Công dụng của máy khoan.1
1.1.2. Công dụng của máy doa. 3
1.2. Vấn đề nghiên cứu của việc khoan lỗ tự động. 4
1.3. Cơ sở lý thuyết ứng dụng. 9
1.3.1. Trong lĩnh vực điều khiển. 9
1.3.2. Hệ thống truyền động. 9
CHƯƠNG 2. Phân tích lựa chọn phương án thiết kế.. 11
2.1. Cụm chi tiết mang đầu khoan, đầu doa:11
2.1.1. Phương án 1: Truyền bằng xilanh khí nén.11
2.1.2. Phương án 2: Sử dụng bộ truyền vít me đai ốc.11
2.1.3. Phương án 3: Bộ truyền bánh răng thanh răng.12
2.1.4. Kết luận:13
2.2. Cơ cấu cấp phôi :13
2.2.1. Phương án 1: Cấp phôi bằng tay robot13
2.2.2. Phương án 2: Cấp phôi bằng xilanh:13
2.2.3. Kết luận:14
2.3. Cơ cấu đưa, đẩy sản phẩm ra:14
2.3.1. Phương án 1 Sử dụng cánh tay robot14
2.3.2. Phương án 2: Truyền bằng xilanh khí nén.14
2.3.3. Kết luận:15
CHƯƠNG 3. Các thành phần trong hệ thống.. 16
3.1. Xilanh. 16
3.1.1. Thiết kế động học. 16
3.1.2. Bản vẽ nguyên lý. 18
3.2. Động cơ. 19
3.2.1. Tính toán công suất19
3.2.2. Động cơ 12V có gắn đầu khoan. 19
3.3. Van. 21
3.4. Rơle. 22
3.4.1. Nguyên tắc hoạt động:22
3.5. Công tắc hành trình. 23
3.5.1. Công tắc hành trình có 2 vị trí:23
3.5.2. Nguyên tắc hoạt động:23
3.6. Các thành phần khác. 24
CHƯƠNG 4. Thiết kế hệ thống cơ khí và điều khiển.. 27
4.1. Thiết kế hệ thống điều khiển.27
4.1.1. Phương án 1 : Điều khiển mạch điện theo phương trình logic rút gọn bằng biểu đồ Karnaugh:27
4.1.2.Phương án 2: Điều khiển mạch điện theo tầng:36
4.1.3.Phương án 3 : Điều khiển mạch điện theo nhịp:38
KẾT LUẬN.. 40
TÀI LIỆU THAM KHẢO.. 41
DANH MỤC HÌNH ẢNH
Hình 1. 1 Phạm vi sử dụng của máy khoan. 2
Hình 1. 2 Một số mũi khoan phổ biến hiện nay. 4
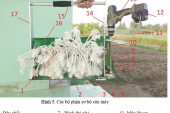
Hình 1. 3 Máy khoan-vát mép-doa tự động. 6
Hình 1. 4 Một số loại đầu khoan nhiều mũi và máy tự động cho ứng dụng khoan, doa tọa độ. 7
Hình 2. 1 Cánh tay robot13
Hình 2. 2 Cấp phôi bằng xilanh. 14
Hình 2. 3 xilanh khí nén. 15
Hình 3. 1 Biểu đồ trạng thái18
Hình 3. 2 Bản vẽ nguyên lý. 19
Hình 3. 3 Động cơ có gắn mũi khoan. 20
Hình 3. 4 Cấu tạo động cơ 1 chiều. 20
Hình 3. 5 Van 5/2. 21
Hình 3. 6 Các phần cửa trong van. 22
Hình 3. 7 Mô phỏng rơ le. 22
Hình 3. 8 rơ-le trung gian 8 chân MY2N-GS 24V DC.. 23
Hình 3. 9 Công tắc hành trình. 24
Hình 3. 10 Bộ chuyển nguồn 220V DC sang 12V AC.. 24
Hình 3. 11 Đầu chia khí25
Hình 3. 12 Dây dẫn khí25
Hình 4. 1 Giản đồ trạng thái27
Hình 4. 2 Sơ đồ mạch điện theo karnaugh van 2 tín hiệu. 34
Hình 4. 3 Sơ đồ mạch điện theo karnaugh van 1 tín hiệu. 35
Hình 4. 4 Mạch điện sau khi rút gọn các tiếp điểm.. 36
CHƯƠNG 1. TỔNG QUAN VỀ ĐỀ TÀI NGHIÊN CỨU
1.1. Giới thiệu chung
Ngày nay, việc sử dụng các dây chuyền, hệ thống để chế tạo sản phẩm không còn là điều mới mẻ đối với các quốc gia trên thế giới. Đối với các nước có nền công nghiệp phát triển thì các hệ thống gia công này được đầu tư thiết kế, trang bị đầy đủ và vô cùng hiện đại, có các kết cấu cơ khí rất chính xác, các robot trong dây chuyền hết sức linh hoạt. Và đặc biệt, công việc điều khiển dây chuyền rất đơn giản, dễ dàng, thuận tiện cho người sử dụng và có thể dễ dàng thay đổi chương trình điều khiển hoạt động của của dây chuyền để chế tạo các chi tiết máy, các sản phẩm khác theo yêu cầu thực tế của thị trường. Quy trình hoạt động của hệ thống là một chu trình liên tục khép kín, từ nguyên công cấp phôi cho đến nguyên công đóng gói sản phẩm đưa vào kho dữ trữ hay đưa ra thị đều được tự động hóa.
Với Việt Nam là một quốc gia có nền công nghiệp đang phát triển, đang cố gắng học hỏi, tiếp cận, kế thừa các công nghệ cao của thế giới. Hiện tại ở nước ta các máy gia công chính xác như NC, CNC … đang dần dần được các công ty, các trung tâm gia công đưa vào để thay thế các máy gia công truyền thống. Do điều kiện kinh tế, cơ sở vật chất, trình độ con người còn thấp nên các dây chuyền sản xuất tự động công nghệ cao, các dây chuyền gia công tích hợp CIM chưa được sử dụng rộng rãi. Vì vậy, chúng còn tương đối mới mẻ, xa lạ với học sinh, sinh viên cũng như các trung tâm gia công, các công ty chế tạo.
Do vậy, việc nghiên cứu, thiết kế và chế tạo mô hình khoan và doa lỗ tự động trong cùng một chu trình là cần thiết.
1.1.1. Công dụng của máy khoan.
Máy khoan là một trong những phương pháp phổ biến và cơ bản nhất để gia công lỗ trên vật liệu đặc.ngoài ra nó còn dùng để khoét, doa, cắt ren, taro hoặc gia công các bề mặt có tiết diện nhỏ thẳng góc hoặc cùng chiều trục với lỗ khoan.
Chuyển động tạo hình của máy khoan là chuyển động chính quay tròn và chuyển động chạy dao s. Cả 2 chuyển động này đều do dao thực hiện.
Hình 1. 1 Phạm vi sử dụng của máy khoan
Khoan có thể gia công được các loại lỗ thông và không thông với đường kính từ 0,25 ÷ 80 mm; độ chính xác gia công thấp, chỉ đạt cấp 10, 11 (cao nhất chỉ là 7 đối với khoan nòng súng); độ nhám bề mặt Ra = 20 ÷ 40 μm. Do vậy, khoan chỉ dùng để gia công các lỗ bắt bulông, lỗ làm ren, các lỗ có yêu cầu không cao và nguyên công thô cho các nguyên công tinh sau nó.
Kích thước lỗ gia công bằng phương pháp khoan phụ thuộc vào kích thước mũi khoan. Đối với lỗ thông nhỏ, trung bình thường dùng mũi khoan ruột gà; lỗ lớn, chiều dμy nhỏ và thông thì dùng mũi khoan vành; còn đối với lỗ sâu (l/d > 10 ÷ 12) thì dùng mũi khoan nòng súng.
Sở dĩ khoan chỉ đạt độ chính xác thấp là vì:
- Kết cấu mũi khoan chưa hoàn thiện. Luôn phải tồn tại lưỡi cắt ngang (vì không thể chế tạo mũi khoan có đường kính lõi bằng không), tại lưỡi cắt ngang góc trước γ < 0, cho nên lưỡi cắt ngang càng dài thì lực dọc trục càng lớn, mũi khoan càng nhanh mòn. Ngày nay, người ta cố gắng chế tạo mũi khoan sao cho lưỡi cắt ngang càng ngắn càng tốt.
- Các sai số do chế tạo và mài mũi khoan sinh ra (độ không đồng tâm giữa phần cắt và chuôi côn) sẽ làm cho lỗ khoan bị lay rộng ra. Trên mũi khoan, phần cắt có độ côn ngược, khi mũi khoan mài lại càng nhiều thì kích thước lỗ sẽ nhỏ đi.
- Lỗ khoan bị cong: sai số này do mài hai lưỡi cắt không đều, lực dọc trục của mũi khoan không đều làm cho lỗ khoan bị cong, loại này hay gặp khi khoan trên máy khoan hay máy phay (chi tiết đứng yên). Ngoài ra, khi khoan các vật liệu mà lỗ khoan gặp phải các rỗ khí hay pha cứng cũng bị sai số này.
- Lỗ khoan bị lay rộng: khi tâm quay và tâm phần cắt của mũi khoan không trùng nhau sẽ làm cho lỗ khoan bị rộng ra.
- Lỗ khoan bị tóp, loe: do khi ăn dao không đúng tâm, độ cứng vững mũi khoan kém sẽ làm cho tâm quay và tâm mũi khoan bị lệch đi một góc.
- Lỗ bị thu hẹp: Trên mũi khoan, phần cắt có độ côn ngược, khi mòn thì ta sẽ mμi lại, nếu mũi khoan mài lại càng nhiều thì kích thước mũi khoan sẽ càng nhỏ so với ban đầu, do đó lỗ gia công sẽ nhỏ đi.
Biện pháp khắc phục: Ngoài những biện pháp đảm bảo độ cứng vững và độ chính xác của hệ thống công nghệ như độ chính xác của máy, dao, đồ gá; kết cấu hợp lý của chi tiết; còn phải chú ý đến các biện pháp công nghệ sau đây:
- Giảm bớt lực chiều trục và mômen cắt bằng cách giảm bớt chiều dài lưỡi cắt ngang khi mài sắc mũi khoan.
- Khi khoan lỗ sâu, nên cho chi tiết quay tạo chuyển động cắt, còn mũi khoan thực hiện chuyển động tịnh tiến, chọn lượng chạy dao nhỏ để lực cắt bé, không ảnh hưởng đến quá trình cắt gọt (vì do mũi khoan kém cứng vững nên nếu nó vừa quay, vừa tịnh tiến thì sẽ dễ bị nghiêng hoặc lệch).
- Dùng bạc dẫn hướng để đảm bảo độ chính xác.
- Khoan lỗ nhỏ phải khoan mồi trước để định tâm bằng mũi khoan ngắn.
- Dùng pointu để lấy dấu trước khi khoan.
- Sử dụng dung dịch trơn nguội đúng và đủ.
1.1.2. Công dụng của máy doa
Doa là phương pháp gia công tinh các lỗ sau khi khoan, hoặc sau khi khoan, khoét hoặc tiện. Doa có thể đạt độ chính xác cấp 9 ÷ 7, Ra = 0,63 ÷ 1,25 μm, khi chuẩn bị công nghệ và dao tốt có thể đạt cấp chính xác 6, Ra = 0,63 μm nhưng chi phí sản xuất cao, năng suất thấp nên ít dùng.
Doa có độ cứng vững cao, lưỡi cắt thường phân bố không đối xứng nên giảm được rung động trong quá trình cắt, góc trước lớn nên có thể cắt được lớp phoi mỏng. Chế độ cắt khi doa: Lượng dư khi doa được khống chế khá chặt chẽ, thường doa thô t = 0,25 ÷ 0,5 mm, doa tinh t = 0,05 ÷ 0,15 mm. Vận tốc cắt khi doa nhỏ, thường v = 8 ÷ 10 m/ph. Lượng chạy dao s = 0,5 ÷ 3,5 mm/vòng. Mặc đù vận tốc cắt thấp nhưng năng suất doa vẫn cao nhờ lượng chạy dao lớn
Nhược điểm cơ bản của doa là không sửa được sai lệch về vị trí tương quan do các bước hay nguyên công sát trước để lại (hoặc có thể sửa được nhưng không đáng kể).
Doa có thể thực hiện trên các loại máy như: máy khoan, máy tiện, máy phay, máy doa hoặc thực hiện bằng tay
Một số chú ý khi doa.
- Chỉ nên dao cưỡng bức trong một số trường hợp như: các lỗ khoan, khoét, doa trên một lần gá hoặc các lỗ ngắn, lỗ lớn. Còn lại nên doa tuỳ động.
- Không nên doa các lỗ quá lớn, các lỗ có kích thước phi tiêu chuẩn, các lỗ ngắn, các lỗ không thông, các lỗ có rãnh, lỗ trên các loại vật liệu quá cứng hoặc quá mềm.
- Thường doa đi theo bộ khoan-khoét-doa và dao doa khá đắt tiền nên dao chỉ sử dụng có hiệu quả khi sản lượng gia công đủ lớn.
Hình 1. 2 Một số mũi khoan phổ biến hiện nay
1.2. Vấn đề nghiên cứu của việc khoan lỗ tự động
Trong sự nghiệp công nghiệp hoá, hiện đại hoá đất nước, có thể nói một trong những tiêu chí để đánh giá sự phát triển kinh tế của mỗi quốc gia là mức độ tự động hoá trong các quá trình sản xuất mà trước hết đó là năng suất sản xuất và chất lượng sản phẩm làm ra. Sự phát triển rất nhanh chóng của máy tính điện tử, công nghệ thông tin và những thành tựu của lý thuyết Điều khiển tự động đã làm cở sở và hỗ trợ cho sự phát triển tương xứng của lĩnh vực tự động hoá. Ở nước ta mặc dầu là một nước chậm phát triển, nhưng những năm gần đây cùng với những đòi hỏi của sản xuất cũng như sự hội nhập vào nền kinh tế thế giới thì việc áp dụng các tiến bộ khoa học kỹ thuật mà đặc biệt là sự tự động hoá các quá trình sản xuất đã có bước phát triển mới tạo ra sản phẩm có hàm lượng chất xám cao tiến tới hình thành một nền kinh tế tri thức. Ngày nay tự động hoá điều khiển các quá trình sản xuất đã đi sâu vào từng ngõ ngách, vào trong tất cả các khâu của quá trình tạo ra sản phẩm. Một trong nhữnh ứng dụng đó mà đồ án này thiết kế là điều khiển công nghệ khoan, doa. Tự động hoá điều khiển công nghệ khoan và doa là quá trình tạo ra một lỗ thủng trên bề mặt vật thể có kích thước chiều sâu định trước và gia công tinh bề mặt lỗ. Trong công việc thiết kế, tự động hoá điều khiển được thể hiện qua hai quá trình sau:
- Tự động hoá điều khiển công việc đưa vật thể vào vị trí định trước (xác định vị trí lỗ khoan).
- Tự động hoá đưa mũi khoan vào khoan vật thể sau đó quay về vị trí cũ để đảm bảo cho quy trình tiếp theo.
- Tự động hóa đưa mũi doa vào lỗ đã khoan trước sau đó đưa về vị trí ban đầu để thực hiện chu trình tiếp theo.
Chất lượng mũi khoan, doa và năng suất làm việc phụ thuộc rất nhiều vào công nghệ điều khiển. Quá trình làm việc được thực hiện theo một trật tự logic, theo trình tự thời gian xác định do đó để điều khiển được công nghệ ta phải tổng hợp được hàm điều khiển cho hệ thống.
Sau một thời gian ngắn tìm hiểu về khoan và doa lỗ tự động để tăng năng suất, tăng độ chính xác, giảm sai số nhiều lần gá đặt và nhằm tăng tính cạnh tranh trên thi trường. Thì việc thiết kế hệ thống khoan và doa lỗ tự động trong một chu trình là rất cần thiết.
Hiện nay ở các nước phát triển về tự động hóa đã sản xuất ra nhiều máy khoan và doa lỗ tự động khác nhau.
Sau đây là một số máy khoan và doa lỗ được sử dụng hiện nay:
a. Máy khoan-vát mép-doa tự động
Hình 1. 3Máy khoan-vát mép-doa tự động
Thông số kỹ thuật máy khoan-vát mép-doa tự động:
- Kích thước máy : 1962(W) x 2010 (D) x 1820 (H) (mm).
- Chiều cao vận hành của máy: 850 mm tính từ mặt sàn.
- Nguồn điện: Nguồn 3 phase, AC 200 V, 50 Hz.
- Điện áp điều khiển: DC 24 V.
- Yêu cầu nguồn khí nén: 0.4 – 0.6 Mpa.
b. Thông số kỹ thuật máy khoan-vát mép-doa tự động:
- Kích thước máy : 1962(W) x 2010 (D) x 1820 (H) (mm).
- Chiều cao vận hành của máy: 850 mm tính từ mặt sàn.
- Nguồn điện: Nguồn 3 phase, AC 200 V, 50 Hz.
- Điện áp điều khiển: DC 24 V.
- Yêu cầu nguồn khí nén: 0.4 – 0.6 Mpa.
Hình 1. 4 Một số loại đầu khoan nhiều mũi và máy tự động cho ứng dụng khoan, doa tọa độ
c. Module khoan doa tự động Đài Loan
|
Model |
SWD65-100 |
SWD65H-100 |
|
Khả năng khoan |
25mm |
25mm |
|
Khả năng doa |
45mm |
45mm |
|
Tốc độ |
2000 |
5000 |
|
Áp suất thủy lực |
20-25 kg/cm² |
20-25 kg/cm² |
|
Đường kính xy lanh |
40mm |
40mm |
|
Diện tích xylanh tiến |
9.42 cm² |
9.42 cm² |
|
Diện tích xylanh lùi |
9.42 cm² |
9.42 cm² |
|
Motor |
3HP |
3HP |
|
Puli |
A×3-ODφ98 |
A×3-ODφ98 |
|
HTD-8M-40T |
HTD-8M-40T |
|
|
Trọng lượng |
72Kg |
72Kg |
1.3. Cơ sở lý thuyết ứng dụng
1.3.1. Trong lĩnh vực điều khiển
- Vào những thập niên 50 và 60 của thế kỷ 20, là thời gian phát triển mạnh mẽ của giai đoạn tự động hóa quá trình sản xuất, kỹ thuật điều khiển bằng khí nén được phát triển rộng rãi và đa dạng trong nhiều lĩnh vực khác nhau.
- Hệ thống điều khiển bằng khí nén được sử dụng trong các lĩnh vực như: các
- thiết bị phun sơn, các loại đồ gá kẹp chi tiết hoặc là sử dụng trong lĩnh vực sản xuất các thiết bị điện tử vì điều kiện vệ sinh môi trường rất tốt và an toàn cao.
- Ngoài ra hệ thống điều khiển bằng khí nén được sử dụng trong các dây chuyền rửa tự động, trong các thiết bị vận chuyển và kiểm tra của thiết bị lò hơi, thiết bị mạ điện, đóng gói, bao bì và trong công nghiệp hóa chất.
- Các dụng cụ, thiết bị máy va đập: các thiết bị, máy móc trong lĩnh vự khai thác đá, khai thác than, trong các công trình xây dựng (xây dựng hầm mỏ, đường hầm,...).
- Truyền động thẳng: vận dụng truyền động bằng áp suất khí nén cho chuyển
- động thẳng trong các dụng cụ, đồ gá kẹp chặt chi tiết, trong các thiết bị đóng gói, trong các loại máy gia công gỗ, trong các thiết bị làm lạnh cũng nh- trong hệ thống phanh hãm của ôtô.
- Truyền động quay: truyền động xilanh, động cơ quay với công suất lớn bằngnăng lượng khí nén.
- Trong các hệ thống đo và kiểm tra: được dùng trong các thiết bị đo và kiểm tra chất lượng sản phẩm.
- Có khả năng truyền năng lượng đi xa, bởi vì độ nhớt động học của khí nén nhỏ và tổn thất áp suất trên đường dẫn nhỏ.
- Do khả năng chịu nén (đàn hồi) lớn của không khí, nên có thể trích chứa khí nén rất thuận lợi. Vì vậy có khả năng ứng dụng để thành lập một trạm trích chứa khí nén.
- Không khí dùng để nén, hầu như có số lượng không giới hạn và có thể thải ra ngược trở lại bầu khí quyển.
- Hệ thống khí nén sạch sẽ, dù cho có sự rò rỉ không khí nén ở hệ thống ống dẫn, do đó không tồn tại mối đe dọa bị nhiễm bẩn.
- Chi phí nhỏ để thiết lập một hệ thống truyền động bằng khí nén, bởi vì phần lớn trong các xí nghiệp, nhà máy đã có sẳn đường dẫn khí nén.
- Hệ thống phòng ngừa quá áp suất giới hạn được đảm bảo, nên tính nguy hiểm của quá trình sử dụng hệ thống truyền động bằng khí nén thấp.
- Các thành phần vận hành trong hệ thống (cơ cấu dẫn động, van, ...) có cấu tạo đơn giản và giá thành không đắt.
- Các van khí nén phù hợp một cách lý tưởng đối với các chức năng vận hành
1.3.2. Hệ thống truyền động
1.3.2.1 Ưu điểm
logic, và do đó được sử dụng để điều khiển trình tự phức tạp và các móc phức hợp.
1.3.2.2 Nhược điểm
- Lực để truyền tải trọng đến cơ cấu chấp hành thấp.
- Khi tải trọng trong hệ thống thay đổi, thì vận tốc truyền cũng thay đổi theo, bởi vì khả năng đàn hồi của khí nén lớn. (Không thể thực hiện được những chuyển độngthẳng hoặc quay đều).
- Dòng khí thoát ra ở đường dẫn ra gây nên tiếng ồn.
- Ưu điểm: Đơn giản, rẻ tiền, dễ tháo lắp, lực tương đối mạnh đủ để thực hiện chu trình khoan lỗ.
- Nhược điểm: Khó điêù khiển hành trình mũi khoan.
CHƯƠNG 2. Phân tích lựa chọn phương án thiết kế
2.1. Cụm chi tiết mang đầu khoan, đầu doa:
2.1.1. Phương án 1: Truyền bằng xilanh khí nén.
Hình 2. 1 xilanh khí nén
2.1.2. Phương án 2: Sử dụng bộ truyền vít me đai ốc.
- Ưu điểm: Truyền động chính xác. Chuyển động êm, ít gây tiếng ồn. Kết cấu đơn giản tỉ số truyền lớn, có thể điều chỉnh hành trình mũi khoan tiến lùi linh hoạt nhờ động cơ bước.
- Nhược điểm: Hiệu suất truyền thấp.
Hình 2. 2Bộ truyền vít me đai ốc
2.1.3. Phương án 3: Bộ truyền bánh răng thanh răng.
- Ưu điểm: Đơn giản, dễ điều khiển (bằng tay),Tạo lực tác động lớn.
- Nhược điểm: Hành trình mũi khoan bị hạn chế bởi đường kính bánh răng.Gây ồn khi hoạt động nhanh.
Hình 2. 3 Bộ truyền thanh răng bánh răng
2.1.4. Kết luận:
Dựa vào những đặc điểm trên của từng phương án, ta ưu tiên chọn phương án truyền động bằng xilanh khí nén, vì nó rẻ tiền, đơn giản và hơn hết là dễ lập trình trong hệ thống điều khiên điện khí nén hơn các loại khác.
Các loại như vít me và thanh răng bánh răng phải được lập trình bằng vi điều khiển.
2.2. Cơ cấu cấp phôi :
2.2.1. Phương án 1: Cấp phôi bằng tay robot
- Ưu điểm: Chính xác, sử dụng hệ thống vi điều khiển nên thông minh, dễ tùy biến. Có thể tùy chỉnh đưa phôi vào ở các vị trí khác nhau chỉ bằng cách lập trình không phải thay đổi nhiều hệ phần cứng.Có thể cải tiến để tạo ra nhiều hành động chọn phôi có lựa chọn.
- Nhược điểm: Việc thiết kế và lập trình cách tay robot tốn nhiều thời gian chi phí.
Hình 2. 1 Cánh tay robot
2.2.2. Phương án 2: Cấp phôi bằng xilanh:
- Ưu điểm: Đơn giản, rẻ tiền hơn cánh tay robot. Hoạt động nhanh chóng và gọn nhẹ.
- Nhược điểm: Khó thay đổi, khi cần đổi cách nhập phôi phải thay đổi hệ phần cứng khá nhiều
Hình 2. 2 Cấp phôi bằng xilanh
2.2.3. Kết luận:
Dựa trên các ưu nhược điểm của các phương án trên, ta chọn phương án cấp phôi bằng xilanh vì nó phù hợp với mô hình máy khoan tự động hơn (các phôi trước khi đưa vào khoan đã được lựa chọn)
2.3. Cơ cấu đưa, đẩy sản phẩm ra:
2.3.1. Phương án 1 Sử dụng cánh tay robot
Ưu điểm và nhược điểm của phương pháp này tương tự với cánh tay robot cấp phôi. Bên cạnh đó, cánh tay robot có phạm vi hoạt động nhỏ, khó điều chỉnh.
2.3.2. Phương án 2: Truyền bằng xilanh khí nén.
- Ưu điểm: Đơn giản, rẻ tiền, dễ tháo lắp,Lực tương đối mạnh đủ để thực hiện chu trình khoan lỗ.
- Nhược điểm: Khó điêù khiển hành trình mũi khoan.
Hình 2. 3 xilanh khí nén
2.3.3. Kết luận:
Dựa vào những đặc điểm trên của từng phương án, ta ưu tiên chọn phương án truyền động bằng xilanh khí nén, vì nó rẻ tiền, đơn giản và hơn hết là dễ lập trình trong hệ thống điều khiên điện khí nén hơn các loại khác. (các loại như vít me và thanh răng bánh răng phải được lập trình bằng vi điều khiển).
CHƯƠNG 3. Các thành phần trong hệ thống
3.1. Xilanh
3.1.1. Thiết kế động học
3.1.1.1 Tính chọn xilanh cấp và kẹp phôi.
Pitong A, C: Giúp đẩy phôi vào và kẹp chặt:
Xi lanh khi hoạt động cần cung cấp 1 lực đẩy tối thiểu 40N. Nếu bỏ qua lực ma sát và trọng lượng của trục pittong ta có công thức:
F = P*A
Trong đó:
P là áp suất khí nén tác dụng lên xi lanh:
P = 2 bar = 0,2 (N/mm2)
3.1.1.2 Tính chọn xilanh mang đầu khoan, đầu dao.
Pitong B và D: Giúp đầy mũi khoan, mũi doa theo phương từ trên xuống dưới
Xi lanh mang đầu khoan và đầu doa khi hoạt động cần cung cấp 1 lực đẩy tối thiểu 60N.
Tính chọn xilanh đẩy phôi ra ngoài.
Pitong E: Giúp đẩy vật ra ngoài sau khi doa
Xi lanh khi hoạt động cần cung cấp 1 lực đẩy tối thiểu 10N. Nếu bỏ qua lực ma sát và trọng lượng của trục pittong ta có công thức:
F = P*A
Trong đó:
P là áp suất khí nén tác dụng lên xi lanh:
P = 2 bar = 0.2 (N/mm2)
3.1.1.3 Tính toán cơ cấu chấp hành chính
Với áp suất khí nén đầu vào không thay đổi thì lực tác dụng của xilanh phụ thuộc vào đường kính trong của xilanh. Nên ta phải chọn xilanh có đường kính thích hợp.
a. Xylanh A và C: Giúp đẩy phôi vào và kẹp chặt
P là áp suất khí nén tác dụng lên xi lanh:
P = 2 bar = 0,2 (N/mm2)
A là diện tích làm việc của cần pittong.
A = F/P = 40/0,2 = 200 (mm2)
Đường kính trong của xilanh:
d = 2√(A/π) = 2√(200/π) = 16 (mm)
Chọn xylanh có các thông số:
Hành trình xylanh: 250 mm
Đường kính trong: 16 mm
b. Xylanh B và D: Giúp đầy mũi khoan theo phương từ trên xuống dưới
Xi lanh ép bánh khi hoạt động cần cung cấp 1 lực đẩy tối thiểu 60N.
Diện tích làm việc của cần pittong
A = F/P = 60/0,2 = 300 (mm2)
Đường kính trong của xilanh:
d = 2√(A/π) = 2√(300/π) = 19 (mm)
Chọn xylanh có các thông số:
Hành trình xylanh: 200 mm
Đường kính trong: 20 mm
c. Xylanh E: Giúp đẩy vật ra ngoài sau khi khoan
Xi lanh khi hoạt động cần cung cấp 1 lực đẩy tối thiểu 10N. Nếu bỏ qua lực ma sát và trọng lượng của trục pittong ta có công thức:
F = P*A
Trong đó:
P là áp suất khí nén tác dụng lên xi lanh:
P = 2 bar = 0.2 (N/mm2)
A là diện tích làm việc của cần pittong.
A = F/P = 10/0,2 = 50 (mm2)
Đường kính trong của xilanh:
d = 2√(A/π) = 2√(50/π) = 8 (mm)
Chọn xylanh có các thông số:
Hành trình xylanh: 200 mm
Đường kính trong: 8 mm
3.1.2. Bản vẽ nguyên lý
Nguyên lý hoạt động:
- Khi ấn nút khởi động, xilanh A duỗi thẳng cấp phôi tới vị trí đầu khoan và thực hiện kẹp phôi để chuẩn bị cho quá trình khoan.
- Khi xi lanh A duỗi thẳng chạm a1 làm xilanh B mang đầu khoan duỗi ra đồng thời động cơ mang đầu khoan hoạt động tiến hành khoan chi tiết.
- Sau khi khoan xong, xilanh B lùi về chạm b0 làm cho xi lanh C duỗi thẳng đẩy chi tiết tới vị tí đầu doa và thực hiện kẹp chi tiết.
- Khi xilanh C duỗi thẳng chạm vào c1 làm cho xilanh D mang đầu doa tịnh tiến và động cơ mang đầu doa hoạt động thực hiện quá trình doa.
- Sau khi doa xong, xilanh D lùi về chạm d0 làm cho xilanh E duỗi thẳng đẩy phôi ra ngoài hoàn thiện một quá trình.
Hình 3. 1 Biểu đồ trạng thái
Hình 3. 2 Bản vẽ nguyên lý
3.2. Động cơ
3.2.1. Tính toán công suất
Ta chọn động cơ 12V với các thông số:
- Chiều dài 123mm.
- Đường kính thân: 31mm.
- Đường kính kẹp mũi khoan: 0.6-6mm.
- Sử dụng nguồn DC 12V DC 2A-5A
- Trọng lượng 320g.
3.2.2. Động cơ 12V có gắn đầu khoan
Động cơ DC là động cơ điện hoạt động với dòng điện một chiều. Động cơ điện một chiều ứng dụng rộng rãi trong các ứng dụng dân dụng cũng như công nghiệp. Thông thường động cơ điện một chiều chỉ chạy ở một tốc độ duy nhất khi nối với nguồn điện, tuy nhiên vẫn có thể điều khiển tốc độ và chiều quay của động cơ với sự hỗ trợ của các mạch điện tử cùng phương pháp PWM.
Động cơ điện một chiều trong dân dụng thường là các dạng động cơ hoạt động với điện áp thấp, dùng với những tải nhỏ. Trong công nghiệp, động cơ điện một chiều được sử dụng ở những nơi yêu cầu moment mở máy lớn hoặc yêu cầu thay đổi tốc độ trong phạm vi rộng. ở đây ta chỉ nghiên cứu động cơ DC trong dân dụng chỉ hoạt động với điện áp 24V trở xuống.
Hình 3. 3Động cơ có gắn mũi khoan
Một động cơ DC có 6 phần cơ bản:
- Phần ứng hay Rotor (Armature).
- Nam châm tạo từ trường hay Stator (field magnet).
- Cổ góp (Commutat).
- Chổi than (Brushes).
- Trục motor (Axle).
- Bộ phận cung cấp dòng điện DC.
Stator bao gồm vỏ máy, cực từ chính, cực từ phụ, dây quấn phần cảm (dây quấn kích thích). Số lượng cực từ chính ảnh hưởng tới tốc độ quay. Đối với động cơ công suất nhỏ, người ta có thể kích từ bằng nam châm vĩnh cửu
Hình 3. 4 Cấu tạo động cơ 1 chiều
- Nguyên tắc hoạt động:
Khi có một dòng điện chảy qua cuộn dây quấn xung quanh một lõi sắt, cạnh phía bên cực dương sẽ bị tác động bởi một lực hướng lên, trong khi cạnh đối diện lại bị tác động bằng một lực hướng xuống theo nguyên lý bàn tay trái của Fleming. Các lực này gây tác động quay lên cuộn dây, và làm cho rotor quay. Để làm cho rotor quay liên tục và đúng chiều, một bộ cổ góp điện sẽ làm chuyển mạch dòng điện sau mỗi vị trí ứng với 1/2 chu kỳ. Chỉ có vấn đề là khi mặt của cuộn dây song song với các đường sức từ trường. Nghĩa là lực quay của động cơ bằng 0 khi cuộn dây lệch 90o so với phương ban đầu của nó, khi đó rotor sẽ quay theo quán tính. Tương tác giữa dòng điện phần ứng và từ thông kích thích tạo thành momen điện từ. Do đó phần ứng sẽ được quay quanh trục.
3.3. Van
Van điều khiển ta chọn van 5/2 tác động nam châm điện. Có các thông số sau:
Áp suất làm việc: 0,15 – 0,8 Mpa.
Điện áp :AC-24V
Hình 3. 5Van 5/2
Hình 3. 6 Các phần cửa trong van
Khi có điện vào van, cuộn coil được cấp điện, kéo piston trên thân van di chuyển và sẽ đóng hoặc mở theo thiết kế của van. Khi ngừng cấp điện, van trở về trạng thái ban đầu.
3.4. Rơle
Trong kỹ thuật điều khiển, rơle được sử dụng như phần tử xử lý tín hiệu, có nhiều loại rơle khác nhau tùy vào công dụng.
3.4.1. Nguyên tắc hoạt động:
Sự hoạt động của rơle là trên cơ sở từ trường của cuộn dây, trong quá trình đóng mở sẽ có hiện tượng tự cảm. Khi đó quá trình đóng mở rơ le do các tín hiệu vào ra từ các nguồn nuôi điều khiển.
Hình 3. 7 Mô phỏng rơ le
Hình 3. 8rơ-le trung gian 8 chân MY2N-GS 24V DC
3.5. Công tắc hành trình
Dùng để lấy tín hiệu của cơ cấu chấp hành đã đạt vị trí xác lập, khi đó công tắc hành trình có nhiệm vụ truyền tín hiệu về bộ phận điều khiển của hệ thống.
3.5.1. Công tắc hành trình có 2 vị trí:
- Loại thường mở: Khi không có tin hiệu thì 2 đầu tiếp điểm sẽ bị hở mạch, không cho dòng điện đi qua. Khi có tín hiệu tác động thi 2 tiếp điểm bị đóng kín lại, tạo thành mạch kín cho dòng điện đi qua.
- Loại thường đóng: Bình thường 2 tiếp điểm cho dòng điện đi qua, khi có tín hiệu tác động thì 2 tiếp điểm bị hở mạch làm dòng điện không đi qua được.
Thường đóng hay thường mở, do người thiết kế mạch điều khiển nối dây đến các tiếp điểm.
3.5.2. Nguyên tắc hoạt động:
Bình thường tiếp điểm 1 nối với tiếp điển 2 được gọi là thường đóng, khi con lăn chạm cử hành trình, tiếp điểm 1 nối với 4. Ngược lại nếu nối 1 với 4 thì gọi là thường mở. khi có tín hiệu tác động sẽ đóng lại là 1 4 nối với nhau.
Hình 3. 9 Công tắc hành trình
3.6. Các thành phần khác
a. Nguồn điện
Hệ thống sử dụng bộ nguồn tổ ong để chuyển đổi dòng điện cung cấp cho động cơ, rơle và van.
Các thông số cơ bản của nguồn 24V:
- Điện áp đầu vào: 110-220V
- Điện áp đầu ra: 24V 5A
- Công suất: 120W
Các thông số cơ bản của nguồn 12V:
- Điện áp đầu vào: 110-220V AC
- Điện áp đầu ra: 12V 5A DC
- Công suất: 120W
Hình 3. 10 Bộ chuyển nguồn 220V DC sang 12V AC
b. Kết cấu khung sườn cơ khí:
được thiết kết, gia công và lắp ráp từ các vật liệu gồm thép chữ V, ván gỗ ép, bu lông đai ốc, ốc vít.
c. Đầu chia khí:
phân phối khí từ một nhánh nguồn sang các nhánh khác
Hình 3. 11 Đầu chia khí
d. Dây dẫn khí:
dẫn khí nén từ máy nén khí qua các van và từ van đến xilanh.
Hình 3. 12 Dây dẫn khí
e. Công tắc:
công tắc khởi động, công tắc dừng và công tắc reset hệ thống.
Công tắc start
f. Dây điện:
để kết nối truyền tín hiệu điện trong hệ thống.
CHƯƠNG 4. Thiết kế hệ thống cơ khí và điều khiển
4.1. Thiết kế hệ thống điều khiển.
4.1.1. Phương án 1 : Điều khiển mạch điện theo phương trình logic rút gọn bằng biểu đồ Karnaugh:
Giản đồ trạng thái:
Hình 4. 1Giản đồ trạng thái
Phương trình logic:
A+ = a0.b0.c0.d0.e0.K.
B+ = a1.b0.c0.d0.e0.
|
Những cặp phương trình trùng nhau |
B- = a1.b1.c0.d0.e0.
A- = a1.b0.c0.d0.e0.
C+ = a0.b0.c0.d0.e0.
D+ = a0.b0.c1.d0.e0.
D- = a0.b0.c1.d1.e0
C- = a0.b0.c1.d0.e0.
E+ = a0.b0.c0.d0.e0.
E- = a0.b0.c0.d0.e1.
SET DC1 = B+
RESET DC1 = A-
SET DC2 = D+
So sánh các phương trình trên, ta thấy điều kiện để thực hiện B+ ≡ A- và A+ ≡ C+ ≡ E-, C- ≡ D+ . Như vậy về phương diện điều khiển thì điều đó không thể thực hiện được. Để có thể phân biệt được các bước trên phương trình phải thêm điều kiện phụ, tức là 2 phần tử nhớ trung gian Z với x và x, y và y là tín hiệu ra của phần tử nhớ trung gian.
Phương trình logic trên sau khi thêm vào phần tử nhớ được viết lạo như sau:
A+ = a0.b0.c0.d0.e0.K.x.y
B+ = a1.b0.c0.d0.e0. x.y
X+ = a1.b1.c0.d0.e0.x.y
B- = a1.b1.c0.d0.e0.x.y
A- = a1.b0.c0.d0.e0.x.y
Y+ = a0.b0.c0.d0.e0.x.y
C+ = a0.b0.c0.d0.e0.x.y
D+ = a0.b0.c1.d0.e0.x.y
X-= a0.b0.c1.d1.e0.x.y
D- = a0.b0.c1.d1.e0.x.y
C- = a0.b0.c1.d0.e0.x.y
E+ = a0.b0.c0.d0.e0.x.y
Y- = a0.b0.c0.d0.e1.x.y
E- = a0.b0.c0.d0.e1.x.y
SET DC1 = B+
RESET DC1 = A-
SET DC2 = D+
RESET DC2 = C-
- Biểu đồ Karnaugh cho 7 biến:
|
`` |
ao bo |
ao bo |
ao bo |
ao bo |
ao b1 |
ao b1 |
ao b1 |
ao b1 |
a1 b1 |
a1 b1 |
a1 b1 |
a1 b1 |
a1 bo |
a1 bo |
a1 bo |
a1 bo |
|
|
eo.x |
C+ |
|
X- |
D+ |
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
eo.x |
Y+ |
|
|
|
|
|
|
|
B- |
|
|
|
|
|
|
A- |
y̅ |
|
eo.x̅ |
A+ |
|
|
|
|
|
|
|
X+ |
|
|
|
|
|
|
B+ |
y̅ |
|
eo.x̅ |
E+ |
|
D- |
C- |
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
e1.x̅ |
Y- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
e1.x̅ |
E- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y̅ |
|
e1.x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y̅ |
|
e1.x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
co do |
co d1 |
c1 d1 |
c1 do |
c1 do |
c1 d1 |
co d1 |
co do |
co do |
co d1 |
c1 d1 |
c1 do |
c1 do |
c1 d1 |
co d1 |
co do |
|
- Đơn giản hành trình các xilanh và phần tử nhớ:
4.1.1.1 Đơn giản hành trình xilanh A:
A + = eo.x̅.y̅. K
A - = bo.x
4.1.1.2 Đơn giản hành trình xilanh B:
B+ = a1.x̅
B- = x
4.1.1.3 Đơn giản hành trình xilanh C:
C+ = x.y
C- = do.x̅
4.1.1.4 Đơn giản hành trình xilanh D:
D+ = x.c1
D- = x̅
4.1.1.5 Đơn giản hành trình xilanh E:
E+ = co.x̅.y
E- = x̅.y̅
4.1.1.6 Đơn giản phần tử nhớ Z1:
X+ = b1
X- = d1
4.1.1.7 Đơn giản phần tử nhớ Z2:
Y+ = x.ao
Y- = e1
Phương trình logic đơn giản:
A+ = eo.x̅.y̅.K
A- = bo.x
B+ = a1.x̅
B- = x
C+ = x.y
C- = do.x̅
D+ = x.c1
D- = x̅
E+ = co.x̅.y
E- = x̅.y̅
X+ = b1
X- = d1
Y+ = x.ao
Y- = e1
SET DC1 = B+ = a1.x̅
RESET DC1 = A- = bo.x = bo + x̅
SET DC2 = D+ = x.c1
RESET DC2 = C- = do.x̅ = do + x
Hình 4. 2 Sơ đồ mạch điện theo karnaugh van 2 tín hiệu
Để đơn giản mạch điện và giảm bớt giá thành lắp ráp ta dùng van slenoid 1 tín hiệu và nối lại mạch điện như sau:
Hình 4. 3 Sơ đồ mạch điện theo karnaugh van 1 tín hiệu
Rút gọn các tiếp điểm để giảm số lượng rơ le và dễ đấu dây láp ráp:
Hình 4. 4Mạch điện sau khi rút gọn các tiếp điểm
4.1.2. Phương án 2: Điều khiển mạch điện theo tầng:
Sơ đồ mạch điện điều khiển theo tầng:
4.1.3. Phương án 3 : Điều khiển mạch điện theo nhịp:
Sơ đồ mạch điện điều khiển theo nhịp:
4.2.
KẾT LUẬN
Qua quá trình làm mô hình thực tế thì nhóm chúng em đã tích lũy được thêm nhiều kiến thức và áp dụng được những kiến thức lý thuyết đã học vào thực tế. Tuy thời gian làm đề tài có hạn và khi làm thì chúng em còn gặp rất nhiều bỡ ngỡ, khó khăn nhưng được sự hướng dẫn tận tình của thầy TS Ngô Thanh Nghị, sự giúp đỡ của các anh chị khóa trước, các bạn cùng lớp và sự cố gắng của bản thân thì chúng em đã hoàn thành đồ án môn học đúng thời gia quy định.
Sau khi hoàn thành tập đồ án này, em đã tìm hiểu và nắm vững các kiến thức về điện khí nén, các loại van, xi lanh khí nén và các loại cảm biến công nghiệp giúp chúng em hiểu hơn về những ứng dụng của nó trong thực tế.
Chúng em đã nhận thấy được rất nhiều sự khó khăn và khác biệt giữa kiến thức thực tế và lý thuyết đã được học, và chúng em tự nhận thấy rằng mình cần phải học tập hơn nữa, cố gắng học hỏi để sau này là một người có ích cho xã hội. Nhóm em xin chân thành cảm ơn thầy TS Ngô Thanh Nghị đã tận tình hướng dẫn nhóm trong suốt quá trình làm mô hình đồ án, cùng với đó là cám ơn sự giúp đỡ của các bạn. Em xin chân thành cảm ơn.
Mặc dù đã cố gắng hết sức nhưng chắc chắn chúng em khó tránh khỏi những thiếu sót trong quá trình thiết kế và chế tạo mô hình để hoàn tất đề tài. Rất mong nhận được sự ủng hộ và giúp đỡ của quý thầy cô!
TÀI LIỆU THAM KHẢO
[1]. Giáo trình Hệ thống truyền động thủy khí – Trần Xuân Tùy, Trần Minh Chính, Trần Ngọc Hải. Khoa cơ khí, Trường đại học bách khoa Đà Nẵng.
[2]. Giáo trình Điều khiển thủy khí & lập trình PLC – Khoa cơ khí, Trường Đại học bách khoa Đà Nẵng.
[3]. Nguyên lý cắt và dụng cụ cắt – Trần Đình Sơn. Khoa cơ khí, Trường đại học bách khoa Đà Nẵng.
[4]. Giáo trình Chi tiết máy – Nguyễn Văn Yến. Khoa SPKT, trường Đại học bách khoa Đà Nẵng.
[5]. Giáo trình Hệ thống điều khiển tự động trong lĩnh vực cơ khí – Trần Xuân Tùy. Khoa cơ khí, Trường Đại học bách khoa Đà Nẵng.
[6]. Giáo trình Trang bị công nghệ và cấp phôi tự động – Phạm Văn Song, Châu Mạnh Lực. Trường đại học bách khoa Đà Nẵng.