LUẬN VĂN TỐT NGHIỆP HỆ THỐNG ĐỖ XE XOAY VÒNG ĐH Bách Khoa

NỘI DUNG ĐỒ ÁN
ĐẠI HỌC QUỐC GIA THÀNH PHỐ HỒ CHÍ MINH
TRƯỜNG ĐẠI HỌC BÁCH KHOA
KHOA CƠ KHÍ
BỘ MÔN THIẾT KẾ MÁY
LUẬN VĂN TỐT NGHIỆP HỆ THỐNG ĐỖ XE XOAY VÒNG ĐH Bách Khoa
MỤC LỤC
LỜI CẢM ƠN…………………………………………………………………………...i
MỤC LỤC……………………………………………………………………………...ii
DANH MỤC HÌNH ẢNH……………………………………………………………...v
DANH MỤC BẢNG BIỂU…………………………………………………………..viii
1. TỔNG QUAN VỀ NHU CẦU SỬ DỤNG, CÁC PHƯƠNG ÁN HỆ THỐNG ĐỖ XE XOAY VÒNG CÓ THỂ ÁP DỤNG TẠI VIỆT NAM.. 1
1.1 Tình hình giao thông và sư gia tăng phương tiện lưu thông. 1
1.2 Những bãi đậu xe tiên tiến đã và đang hoạt động trên thế giới2
1.2.1 Mô hình 1: Bãi đậu xe kiểu truyền thống. 2
1.2.2 Mô hình 2: Bãi đậu xe dạng bán tự động (xếp chồng)3
1.2.3 Mô hình 3: Mô hình xếp tầng. 4
1.2.4 Mô hình 4: Hệ thống đỗ xe sử dụng thang nâng di chuyển. 4
1.2.5 Mô hình 5: Roll park. 6
1.2.6 Mô hình 6: Hệ thống thang di chuyển. 7
1.2.7 Mô hình 7: Hệ thống đỗ xe xoay vòng ngang. 8
2. LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ CHO HỆ THỐNG.. 9
2.1 Thông số thiết kế ban đầu. 9
2.2 Nguyên lý cấu tạo và hoạt động. 11
2.2.1 Cụm làm việc chính. 11
2.2.2 Cụm truyền động. 12
2.2.3 Cụm kết cấu. 14
2.2.4 Cụm điều khiển. 17
2.3 Hình dáng tổng quát của hệ thống. 20
2.4 Tóm tắt nguyên lý hoạt động cho người dùng. 21
2.5 Các bước thiết kế. 22
3. TÍNH TOÁN THIẾT KẾ HỆ THỐNG DẪN ĐỘNG VÀ CHỊU TẢI CHO HỆ THỐNG ĐỖ XE XOAY VÒNG.. 24
3.1 Lựa chọn tải trọng và tính toán công suất cần thiết cho động cơ. 24
3.1.1 Lựa chọn các thông số tải trọng sơ bộ cho hệ thống. 24
3.1.2 Tính toán lực kéo chung và momen tải trên cơ cấu xích tải của hệ thống. 26
3.1.3 Tính toán momen cần thiết cho trục công tác và lựa chọn hiệu suất cho cơ cấu dẫn động. 27
3.1.4 Tính toán các thông số động học. 30
3.2 Tính toán thiết kế và lựa chọn bộ truyền ngoài-bộ truyền xích cho kết cấu. 30
3.2.1 Chọn số răng các đĩa xích. 31
3.2.2 Xác định bước xích. 31
3.2.3 Xác định khoảng cách trục a và số mắc xích. 33
3.2.4 Kiểm nghiệm xích theo độ bền mòn. 33
3.2.5 Xác định các thông số của đĩa xích. 34
3.2.6 Kiểm nghiệm theo độ bền tiếp xúc răng đĩa xích. 36
3.2.7 Tính lực tác dụng. 37
3.2.8 Bảng tổng hợp số liệu. 37
3.3 Tính toán sơ bộ và lựa chọn cơ cấu xích tải con lăn cho hệ thống. 38
3.3.1 Tổng quan về kết cấu xích tải và các thông số tính toán cần lưu ý. 38
3.3.2 Xác định các thông số của bộ truyền xích. 42
3.3.3 Tính toán lực kéo nâng tải ở nhánh chịu tải và kiểm nghiệm tải trọng phá hủy của xích tải ống con lăn. 43
3.3.4 Xác định các thông số cơ bản của đĩa xích. 45
3.3.5 Lựa chọn đĩa xích phù hợp theo catalogue xích tải46
4. TÍNH TOÁN THIẾT KẾ KẾT CẤU THÉP CHỊU TẢI VÀ BỘ PHẬN PALLET NÂNG ĐỠ XE. 47
4.1 Tính toán thiết kế các trục quay dẫn động bởi kết cấu xích truyền động và xích tải47
4.1.1 Chọn vật liệu. 47
4.1.2 Tính thiết kế trục. 47
4.1.3 Xác định khoảng cách giữa các gối đỡ và điểm đặt lực. 48
4.1.4 Tính toán thiết kế sơ bộ cho trục II dẫn động xích tải49
4.1.5 Lựa chọn ổ lăn cho các trục quay:56
4.2 Thiết kế kết cấu thép trong xây dựng và cơ khí theo tiêu chuẩn TCVN.. 63
4.2.1 Thép hình. 64
4.2.2 Thép chữ I theo tiêu chuẩn TCVN trong kết cấu xây dựng và cơ khí65
4.2.3 Thép chữ U theo tiêu chuẩn TCVN trong kết cấu xây dựng và cơ khí65
4.3.4 Thép hộp chữ nhật theo tiêu chuẩn TCVN dùng cho kết cấu chịu tải đứng. 67
4.3.5 Lựa chọn kết cấu thép sơ bộ cho kết cấu dựa trên điều kiện chịu tải theo yêu cầu. 68
5. BẢO DƯỠNG, SỬA CHỮA CƠ CẤU DẪN ĐỘNG VÀ NÂNG TẢI72
5.1 Các tình trạng cần được bảo trì và biện pháp khắc phục:72
5.2 Các bước tiến hành kiểm tra cho cơ cấu để đảm bảo sự đồng bộ của kết cấu nâng chuyển. 73
6. THIẾT KẾ MẠCH ĐIỀU KHIỂN PLC CHO HỆ THỐNG ĐỖ XE XOAY VÒNG.. 74
6.1 Tổng quan về bộ điều khiển PLC và các yêu cầu trong vận hành và sử dụng trên phương diện điều khiển bằng PLC. 74
6.2 Các tiêu chí điều khiển trong vận hành và sử dụng của hệ thống dựa nguyên lí làm việc của bộ xử lí PLC. 75
6.3 Ứng dụng phương pháp Grafcet xây dựng sơ đồ nguyên lí mạch điều khiển PLC cho cơ cấu chấp hành của hệ thống đỗ xe xoay vòng. 76
6.3.1 Giới thiệu tổng quan về ngôn ngữ lập trình điều khiển Grafcet trong xây dựng mạch điều khiển:76
6.3.2 Xây dựng sơ đồ nguyên lí mạch điều khiển PLC dựa trên phương pháp giản đồ Grafcet cho hệ thống đỗ xe xoay vòng. 78
6.4 Thiết kế mạch điều khiển PLC theo các yêu cầu của hệ thống đỗ xe xoay vòng. 82
6.5 Lập trình code PLC điều khiển hệ thống đỗ xe xoay vòng:83
TÀI LIỆU THAM KHẢO.. 87
DANH MỤC HÌNH ẢNH
Hình 1.1: Lượng gia tăng phương tiện giao thông..................... 2
Hình 1.2: Mô hình bãi đậu xe truyền thống.............................. 2
Hình 1. 3: Hệ thống đỗ xe bán tự động..................................... 3
Hình 1. 4: Mô hình xếp tầng.................................................... 4
Hình 1. 5: Hệ thống đỗ xe sử dụng thang nâng di chuyển.......... 5
Hình 1. 6: Mô hình Roll park................................................... 6
Hình 1. 7: Hệ thống đỗ xe thang nâng chuyển.......................... 7
Hình 1. 8: Hệ thống đỗ xe xoay vòng ngang............................. 8
Hình 2.1: Hệ thống đỗ xe xoay vòng........................................ 9
Hình 2.2: Kết cấu 3D xoay vòng............................................ 10
Hình 2.3: Hệ thống đỗ xe xoay vòng...................................... 10
Hình 2. 4: Hệ thống dẫn động xích tải mắc nối tiếp................. 11
Hình 2.5: Hệ thống dẫn động xích tải và mặt cắt nghiêng........ 12
Hình 2. 6: Động cơ dẫn động 3 pha........................................ 13
Hình 2.7: Hệ thống dẫn động sơ cấp bằng động cơ 3 pha........ 13
Hình 2. 8: Cơ cấu dẫn động xích tải ở bộ truyền thứ cấp......... 14
Hình 2. 9: Kết cấu khung thép chịu tải trọng chính................. 15
Hình 2.10: Kết cấu khung thép chịu tải trọng chính................ 16
Hình 2.11: Hệ thống nhận diện và điều khiển bằng PLC......... 17
Hình 2. 12: Kích thước xe chuyên dụng................................. 19
Hình 2. 13: Kết cấu tổng quát................................................ 20
Hình 2. 14: Kết cấu tổng quát bên ngoài................................. 21
Hình 3.1: Catalogue xích tải của Challenge thuộc dòng M Series-Solid pin............................................................................... 25
Hình 3.2: Kết cấu đĩa xích với bước xích 44,45 theo catalogue của Challenge............................................................................. 36
Hình 3.3: Các loại xich tải công nghiệp.................................. 38
Hình 3.4: Xích tải con lăn chốt rỗng....................................... 39
Hình 3.5: Xích tải con lăn chốt đặc........................................ 39
Hình 3.6: Bộ phận hỗ trợ nâng tải theo kiểu K (K attachment). 40
Hình 3.7: Bộ phận hỗ trợ nâng tải theo kiểu L (L attachment). 40
Hình 3.8: Bộ phận hỗ trợ nâng tải theo kiểu S (S attachment).. 40
Hình 3.9: Các kiểu nối mắt xích thông dụng........................... 41
Hình 3.10: Các kiểu nối mắt xích có khoảng hở...................... 41
Hình 3.11: Cơ cấu xích tải M315 của Challenge thuộc dòng M Series-Solid pin.................................................................... 42
Hình 3.12: Nguyên lý và công thức tính lực kéo của xích tải trong hệ thống xích tải gàu............................................................. 43
Hình 3.13: Cơ cấu bánh xích dẫn động................................... 45
Hình 4.1: Biểu đồ phân bố lực kéo của xích tải và xích truyền động..................................................................................... 50
Hình 4.2: Biểu đồ momen của trục dẫn động (trục II)............. 50
Hình 4.3: Cấu tạo các loại ổ thông dụng................................. 56
Hình 4.4: Thông số kích thước tiêu chuẩn theo catalogue của SKF............................................................................................ 57
Hình 4.5: Thông số kích thước tiêu chuẩn theo catalogue của SKF............................................................................................ 59
Hình 4.6: Các loại thép hình thông dụng................................ 64
Hình 4.7: Các loại Thép chữ I thông dụng........................... 65
Hình 4.9: Sơ đồ chịu nén lệch tâm và đúng tâm của kết cấu thép hộp....................................................................................... 69
Hình 6.1: Sơ đồ nguyên lí thu thập và xử lí số liệu đầu vào của hệ thống bằng PLC.................................................................... 74
Hình 6.2: Nguyên lí hoạt động và lấy số liệu của cảm biến...... 76
Hình 6.3: Giao diện dành cho người sử dụng quét thẻ và lấy xe của hệ thống......................................................................... 76
Hình 6.4: Sơ đồ nguyên lí mạch điều khiển PLC..................... 78
Hình 6.5: Nhánh điều khiển cơ cấu trong quá trình gửi xe....... 79
Hình 6.6: Nhánh điều khiển cơ cấu trong quá trình lấy xe....... 80
Hình 6.7: Nhánh điều khiển dừng khẩn cấp khi có trường hợp lỗi kĩ thuật................................................................................. 81
Hình 6.8: Nhóm 4 công tắt hành trình xác định chiều quay...... 81
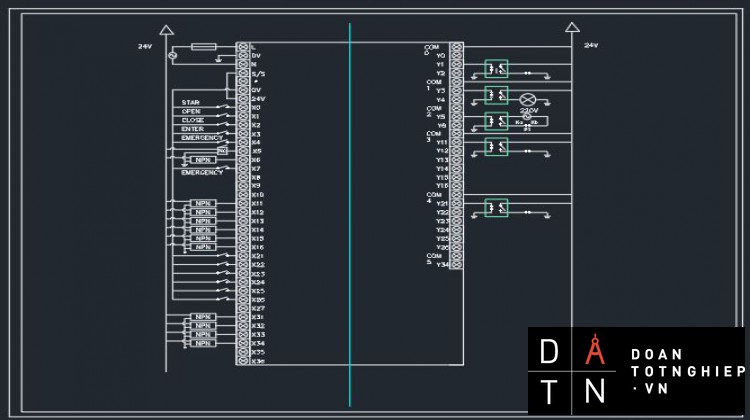
Hình 6.9: Mạch điều khiển hệ thống PLC cho hệ thống đỗ xe xoay vòng..................................................................................... 82
Hình 6.10.1: Bảng code lập trình PLC cho hệ thống đỗ xe xoay vòng............................................................................................. 82
Hình 6.10.2: Bảng code lập trình PLC cho hệ thống đỗ xe xoay vòng............................................................................................ 83
Hình 6.10.3: Bảng code lập trình PLC cho hệ thống đỗ xe xoay vòng............................................................................................ 84
Hình 6.10.4: Bảng code lập trình PLC cho hệ thống đỗ xe xoay vòng............................................................................................ 85
DANH MỤC BẢNG BIỂU
Bảng 3. 1: Catalogue động cơ 3 pha của Mitsubishi29
Bảng 3. 2: Catalogue động cơ 3 pha của Mitsubishi29
Bảng 3. 3: Roller chain catalogue của Challenge. 32
Bảng 3.4: Thông số kích thước của đĩa xích theo catalogue của Challenge. 36
Bảng 3.5: Thông số bộ truyền xích. 37
Bảng 3.6: Thông số về kích thước và tải trọng của xích tải thuộc dòng M-Series Solid Pin. 43
Bảng 3. 7: Thông số đĩa xích trong catalogue tương ứng với bước xích 315 m.. 46
Bảng 4. 1: Kích thước của then. 53
Bảng 4. 2: Bảng tính toán tiết diện nguy hiểm.. 54
Bảng 4. 3: Kiểm nghiệm độ bền then. 55
Bảng 4. 4: Thông số kích thước ổ đỡ lòng cầu 2 dãy của SKF. 57
Bảng 4. 5: Thông số hình học của ổ lòng cầu 2 dãy theo catalogue của SKF. 58
Bảng 4.6: Thông số kích thước ổ đũa trụ ngắn đỡ theo catalogue của SKF. 59
Bảng 4.7: Thông số hình học ổ đũa trụ ngắn đỡ theo catalogue của SKF. 60
Bảng 4.8: Thông số các ổ đũa. 62
Bảng 4.9: Các loại Thép chữ U thông dụng. 66
Bảng 4.10: Các loại thép vuông thông dụng. 67
Bảng 4.11: Các loại thép hộp chữ nhật thông dụng. 68
Bảng 6.1: Chú thích kí hiệu trong mạch điều khiển PLC. 83
1. TỔNG QUAN VỀ NHU CẦU SỬ DỤNG, CÁC PHƯƠNG ÁN HỆ THỐNG ĐỖ XE XOAY VÒNG CÓ THỂ ÁP DỤNG TẠI VIỆT NAM
1.1 Tình hình giao thông và sư gia tăng phương tiện lưu thông
Theo kết quả nghiên cứu của Ủy ban An toàn Giao thông Quốc gia mới được công bố tại một hội thảo ở Hà Nội, nhu cầu về ôtô tại Việt Nam đang ngày càng tăng, nhất là các thành phố lớn, nơi tỷ lệ tăng trưởng ôtô đã vượt qua xe máy. Tỷ lệ tăng trưởng của xe máy trên cả nước hiện là 7,3% và ôtô là 6,5%. Trong khi đó, đối với các đô thị lớn, mức tăng trưởng của xe máy là 10%, còn ôtô lên tới 15%.
Hầu hết lượng ôtô bán ra ở Việt Nam tập trung ở các đô thị loại 1 nhiều nhất là Hà Nội và TP.HCM là nơi tập trung đến 17% dân số cả nước và chiếm khoảng 45% tổng số xe đăng ký mới hàng năm. Hiện tại, Việt Nam đang có 49 triệu xe máy và khoảng 3,2 triệu ôtô đang lưu hành. Xét trên quy mô dân số 95 triệu người, tỷ lệ sở hữu xe máy là 516 xe/1.000 dân, ôtô là 33 xe/1.000 dân.
Như vậy, qua các liệu thống kê nhu cầu mua xe hơi của người Việt đang tăng mạnh trong những năm gần đây. Tuy nhiên số lượng người sở hữu xe ô tô vẫn trung chủ yếu ở các thành phố lớn: Hà Nội, thành phố Hồ Chí Minh, Đà Nẵng ..v.v. Điều này dẫn đến hậu quả tất yếu cơ sở hạ tầng giao thông sẽ không phát triển kịp. Dễ thấy nhất là tình trạng thiếu bãi đỗ xe hơi ngày càng nghiêm trọng tập trung tại Hà Nội và Thành phố Hồ Chí Minh.
Nhận thấy nhu cầu thực tiễn trên đề tài này nghiên cứu và thiết kế một bãi đậu xe ô tô phù hợp với các yêu cầu được đưa ra ở trên dựa trên những kiến thức đã tích lũy được trong quá trình học tập và tham khảo những mô hình đã và đang hoạt động trên thế giới.
Để giải quyết tình trạng này, hàng loạt sáng kiến về hệ thống bãi đỗ xe thông minh đã được các công ty trên thế giới phát triển với rất dạng khác nhau như: Hệ thống bãi đỗ xe tự động từng tầng di chuyển độc lập (Rollpark System), hệ thống bãi đỗ xe tự động dạng xếp hình (Puzzle Parking), hệ thống tháp đỗ xe cao tầng và hệ thống bãi đỗ xe quay vòng đứng.
1.2 Những bãi đậu xe tiên tiến đã và đang hoạt động trên thế giới
Nhiều thành phố phát triển,tiên tiến trên thế giới tập trung nhiều dân cư như: ToKyo,Bắc Kinh,Thượng Hải… cũng có nhiều bãi đậu xe thông minh và giải quyết, đáp ứng được nhu cầu của việc giữ xe ô tô.
Các bãi đậu xe phổ biến và tiêu biểu đang được áp dụng:
1.2.1 Mô hình 1: Bãi đậu xe kiểu truyền thống
|
Hình 1.1: Lượng gia tăng phương tiện giao thông |
Hình 1.2: Mô hình bãi đậu xe truyền thống
Bãi đậu xe này là hệ thống đậu xe phổ biến nhất trên thế giới. Thế nhưng có rất nhiều nhược điểm:
+ Tốn rất nhiều diện tích.
+ Khá bất tiện cho người sử dụng vì tốn thời gian đậu, đỗ xe.
1.2.2 Mô hình 2: Bãi đậu xe dạng bán tự động (xếp chồng)
Hình 1.3: Hệ thống đỗ xe bán tự động
- Mô hình này dùng xi lanh thủy lực để đưa xe lên cao và có thể để thêm 1 xe nửa ở phía dưới.
- Mô hình này có ưu, nhược điểm là:
Ưu điểm:
+ Thiết kế đơn giản.
+ Dễ sửa chữa, bảo dưỡng.
+ Vốn đầu tư thấp.
+ Dễ vận hành.
Nhược điểm:
+ Chiếm khá nhiều diện tích (chỉ phù hợp với quy mô nhỏ và quỹ đất trống rộng).
1.2.3 Mô hình 3: Mô hình xếp tầng
Hình 1.4: Mô hình xếp tầng
- Là bãi đậu xe được thiết kế, vận hành một cách tiên tiến nhất trên thế giới hiện nay.
- Tuy nhiên cũng tồn tại một số ưu nhược điểm sau:
Ưu điểm:
+ Có thể chứa được khá nhiều xe (Khoảng 800 chiếc).
+ Có tính thẩm mỹ cao.
+ Khả năng tự động hóa cao.
Nhược điểm:
+ Vốn đầu tư rất lớn.
+ Thiết kế phức tạp.
1.2.4 Mô hình 4:Hệ thống đỗ xe sử dụng thang nâng di chuyển
Hệ thống đỗ xe tự động sử dụng thang nâng di chuyển là một hệ thống sử dụng một thang máy nâng xe ô tô lên xuống giữa các tầng, thang nâng này có nhiệm vụ vừa lấy xe tại điểm đỗ, vừa di chuyển dọc theo các tầng để xe.
Hình 1.5: Hệ thống đỗ xe sử dụng thang nâng di chuyển
Tuy nhiên tồn tại một số ưu, nhược điểm sau:
Ưu điểm:
+ Hệ thống bãi đỗ xe điều khiển đơn giản với màn hình cảm ứng (Touch screen)
+ Hệ thống bãi đỗ xe thang nâng di chuyển có thể lắp ngầm hoặc nổi tùy theo nhu cầu của khách hàng
+ Hệ thống đỗ xe tự động này thích hợp với bãi xe có sức chứa lớn từ 100 – 500 xe.
+ Nhìn chung khi công nghệ phát triển thì hệ thống đỗ xe thang nâng di chuyển này sẽ dần được thay thế bằng hệ thống bãi đỗ xe từng tầng hoạt động độc lập với nhiều tính năng ưu việt và dễ dàng bảo dưỡng sửa chữa trong quá trình sử dụng.
Nhược điểm:
+ Thang nâng di chuyển phải hoạt động liên tục nên rất dễ gặp sự cố, thường xuyên phải bảo trì bảo dưỡng gây tốn kém cho người sử dụng.
+ Sử dụng robot để lấy xe ra vào vị trí, robot nâng 2 bánh nên không phù hợp với loại xe số tự động, hiện nay có nhiều hãng nghiên cứu loại robot nâng 4 bánh nhưng giá thành lại cao, gây khó khăn cho chủ đầu tư.
+ Sàn đỗ xe của hệ thống này là sàn bê tông với yêu cầu cao về độ chính xác của mặt phẳng nên rất khó thi công.
+ Khi hệ thống gặp sự cố thì phải dừng lại tất cả hoạt động gửi xe lẫn lấy xe ra
+ Quá trình lấy xe của hệ thống thang di chuyển khá lâu do không đồng thời gửi và lấy một lúc được.
1.2.5 Mô hình 5: Roll park
Hình 1.6: Mô hình Roll park
Hệ thống Roll Park kết hợp giữa thang nâng và bàn dịch chuyển. Trên mỗi bàn dịch chuyển có một cặp robot vận chuyển xe, các xe được đỗ trực tiếp trên sàn để xe.
Đặc điểm:
- Hệ thống phù hợp với khu vực có diện tích lớn;
- Kết hợp di chuyển thang nâng và bàn dịch chuyển tại khu vực vào ra ở mặt đất và khu vực để xe;
- Hoạt động riêng biệt giữa các tầng để xe: Ngay cả trong trường hợp xảy ra sự cố tại một bàn dịch chuyển hay trong thời gian kiểm tra định kỳ, những hệ thống khác vẫn hoạt động bình thường;
- Có thể tiết kiệm chiều cao của khu vực để xe bằng cách xây dựng kết cấu và bàn dịch chuyển bằng thép thay vì bê tông;
- Sức chứa tối ưu: Mỗi bàn dịch chuyển không quá 30 xe.
Hình 1.7: Hệ thống đỗ xe thang nâng chuyển
Hệ thống thang nâng di chuyển có thiết bị vận chuyển chính là một thang nâng động (TD), có thể vừa nâng hạ vừa di chuyển ngang. Mỗi hệ thống chỉ có một thang nâng di chuyển duy nhất.
Đặc điểm:
- Khu vực đỗ xe phải được xây dựng theo đúng tiêu chuẩn của hệ thống;
- Gồm nhiều tầng để xe với kết cấu bê tông hoặc thép;
- Xe được đặt trực tiếp trên các sàn để xe mà không cần pallet;
- Trên sàn thang nâng di chuyển có một cặp robot vận chuyển xe;
- Thang nâng di chuyển có thể kết hợp các chuyển động để giảm thời gian vận chuyển xe;
- Có thể kết hợp thiết bị vận chuyển với bàn xoay (Hệ thống TDR);
- Thích hợp với bãi đỗ xe ngầm.
1.2.7 Mô hình 7: Hệ thống đỗ xe xoay vòng ngang
Hình 1.8: Hệ thống đỗ xe xoay vòng ngang
Hệ thống xoay vòng ngang là hệ thống mà xe được luân chuyển theo kiểu xoay vòng cho đến khi xe cần lấy ra đến khu vực thang nâng. Mỗi xe được đặt trên một sàn pallet và được tích hợp với cơ cấu vận chuyển pallet. Hệ thống gồm 1 thang nâng chính và một thang nâng phụ. Thang nâng chính có nhiệm vụ luân chuyển xe giữa khu vực vào ra và khu vực để xe đồng thời cùng với thang nâng phụ tham gia vào quá trình luân chuyển xe.
Đặc điểm:
- Hệ thống có cơ cấu vận chuyển các sàn pallet theo từng tầng;
- Phù hợp với những vị trí để xe hẹp và dài hoặc những bãi đỗ xe ngầm dưới các tòa nhà;
- Khu vực vào ra là sàn pallet trên sàn thang nâng chính;
- Có thể lắp đặt kết hợp bàn xoay trên thang nâng chính giúp xe không phải lùi trong quá trình vào ra.
2. LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ CHO HỆ THỐNG
Từ những ưu, nhược điểm và tình hình phát triển kinh tế tại Việt Nam, ta chọn phương án 4 để nghiên cứu, phát triển ý tưởng và giải quyết nhu cầu về bãi đậu xe ô tô của nước ta.
2.1 Thông số thiết kế ban đầu
Hệ thống giữ xe thông minh xoay vòng:
Thông số kĩ thuật và kích thước chung của các loại hệ thống đỗ xe xoay vòng dùng trong đô thị lớn:
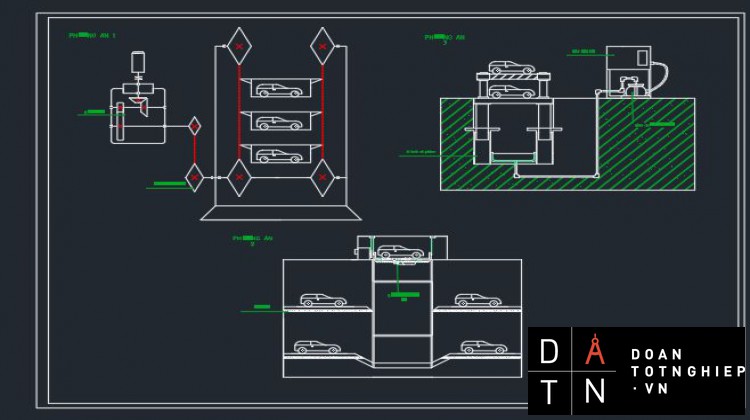
Hình 2.1: Hệ thống đỗ xe xoay vòng
Hệ thống bãi đỗ xe tự động – dạng xoay vòng đứng là loại thiết bị rất hiệu quả cho các nơi có diện tích nhỏ hẹp dưới mặt đất, có thể lắp được 2, 3 hoặc 4 tầng trở lên phù hợp với các cơ quan hay các khu chung cư, tập thể. Hệ thống xoay vòng đứng gồm có thang nâng chính và phụ. Chúng vận hành đồng bộ và tuần tự đưa các xe vào hoặc ra theo chiều ngang. Sau đó, mỗi xe được đặt trên một bàn nâng chuyển để tăng hiệu quả xếp xe khi ra, vào và di chuyển trong hệ thống một cách dễ dàng, tiện lợi nhất.
Các thông số kĩ thuật của hệ thống đỗ xe dạng xoay vòng đứng tự động thông minh cho đô thị lớn được nghiên cứu phù hợp với nhiều nơi để lắp đặt hệ thống, trong đó:
- Kích thước xe tối đa: D (L) 5000 X R (W) 2050 X C (H) 1550
- Khối lượng xe tối đa 2000 kg
- Tốc độ gửi xe trung bình: 45 giây /xe
- Công suất điện: 15KVA -3- phase X 300V X 50Hz
- Sức chứa tối ưu: 8-14 xe
- Tiêu chuẩn thiết kế: 2000 kg / chỗ đậu xe
- Diệt tích sử dụng 1 modul 7-14 vị trí: 6,5 x5,6m
- Cao 7-16m
- Hệ số sử dụng diện tích: 95%
- Số lượng vị trí/ 1 module: 7-14 vị trí
Hệ thống bãi đỗ xe tự động quay vòng đứng là hệ thống bãi đỗ xe tự động được lựa chọn để sử dụng khá nhiều trong các khu trung tâm của các đô thị lớn tại Việt Nam nơi có quỹ đất hạn chế, với lợi thế tiết kiệm diện tích từ một vị trí chỉ đỗ được 2 xe sau khi xây dựng có thể đỗ được từ 10-14 xe tùy từng loại bãi đỗ.
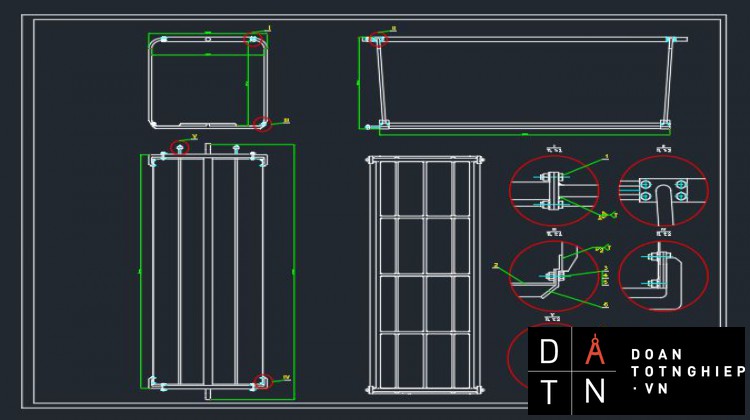
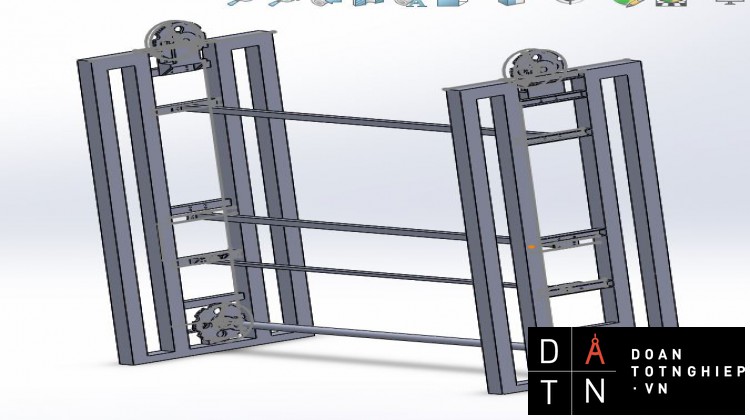
Hình 2.2: Kết cấu 3D xoay vòng
Hình 2.3: Hệ thống đỗ xe xoay vòng.
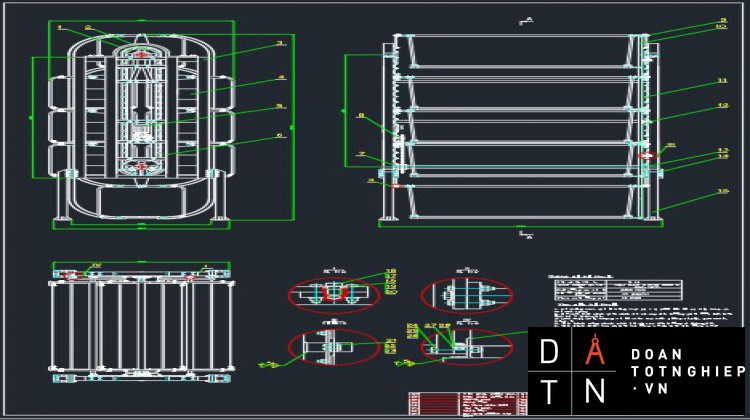
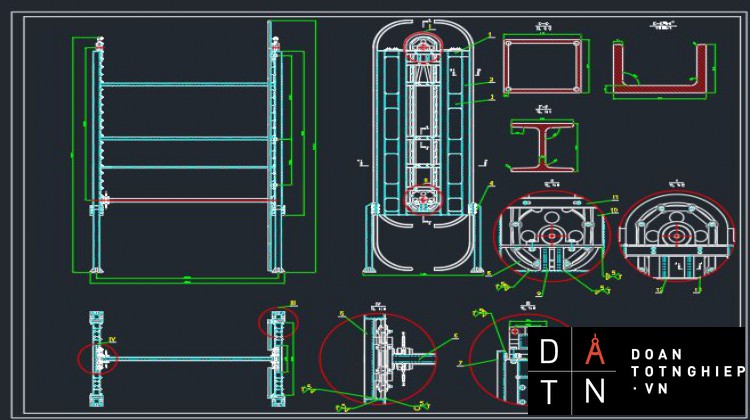
2.2 Nguyên lý cấu tạo và hoạt động
Các pallet chứa xe được treo trên 2 dải xích tải và di chuyển vòng tròng theo chuỗi xích. Trên khung pallet có con lăn tựa dẫn hướng giữ thăng bằng pallet khi chuyển động. Hệ thống sử dụng duy nhất 1 bộ truyền động.
Sử dụng: Hệ thống này được sử dụng rộng rãi cho mọi qui mô và nhiều đối tượng sử dụng: Công sở, cụm dân cư và dịch vụ trông giữ xe, đầu tuyến phố bộ
Cách thức vận hành: Tất cả các pallet đỗ xe đều được xoay vòng theo chiều ngược chiều kim đổng hồ dựa trên dẫn động từ bộ truyền thứ cấp.
2.2.1 Cụm làm việc chính
- Bánh xích tải: Bánh xích với biên dạng răng chuyên dùng cho loại xích tải sử dụng, kích thước lớn.
- Xích tải: Xích chuyên dụng với 12 connecting link để kết nối với 12 ô chứa xe.
- Ô chứa xe: Được thiết kế phù hợp với kích thước xe và các tiêu chuẩn an toàn cho người sử dụng, ngoại thất xe.
Hệ thống dẫn động thứ cấp gồm bao gồm các cơ cấu treo hình tam giác 1 đầu được cố định vào pallet đầu kia được cố định vào từng mắt xích tải được tính toán sao cho tạo thành 1 vòng lặp cơ cấu treo được dẫn động bởi xích và bánh xích.
........
– modun đàn hồi của thép hộp bằng 20. (Pa)
I – momen quán tính của tiết diện đối với trục qua trọng tâm tiết diện và vuông góc với mặt phẳng uốn.
- momen quán tính của tổng diện tích tiết diện cốt thép dọc chịu lực lấy đối với trục qua trọng tâm tiết diện và vuông góc với mặt phẳng uốn.
Với tiết diện hình chữ nhật; I= = 200./12= 13,33.
= ( + ).= I theo trường hợp thép hộp.
Với kết cấu thép chịu lực dọc thường chọn = 1.
=1 với là modun đàn hồi của thép.
S là hệ số xét đến ảnh hưởng độ lệch tâm chọn S =0,5.
Ta có thể tính tải trọng cho phép theo công thức gần đúng là = (với = 2000 mm cho trường hợp thép hộp tính vào tới điểm chịu lực của kết cấu chịu tải) = 82644(N) > 75 000 (N) (tải trọng yêu cầu sơ bộ) (thỏa mãn điều kiện chịu tải).
Vậy lựa chọn loại thép hộp có tiết diện bằng hoặc lớn hơn thép chữ nhật (200 x 200 x 15) cho kết cấu nâng tải của hệ thống đỗ xe xoay vòng.
5. BẢO DƯỠNG, SỬA CHỮA CƠ CẤU DẪN ĐỘNG VÀ NÂNG TẢI
5.1 Các tình trạng cần được bảo trì và biện pháp khắc phục:
|
Tình trạng |
Nguyên nhân |
Biện pháp khắc phục |
|
Chùng xích |
Mòn rão sau thời gian sử dụng |
Định kỳ cứ 3 tháng thì canh lại xích, nếu trong môi trường bụi bẩn thì rút xuống 2 tháng |
|
Con lăn bị mòn nhanh |
-Bôi trơn không tốt. -Môi trường bụi bẩn không che chắn. -Xích quá căng. -Vỡ ống, hỏng bi lăn làm con lăn bị lệch tâm chốt xích (trường hợp có bi) |
-Bôi trơn và kiểm tra định kỳ. -Bao che tốt để tránh bụi và các vật khác. -Căng chỉnh xích theo hướng dẫn. -Thay đoạn xích có con lăn bị hỏng và kiểm tra các bộ truyền |
|
Má xích không đều |
-Xích bị cọ xát trên bề mặt -Độ đồng phẳng của 2 bánh xích không đạt, vặn xích |
-Cách ly với mặt mài mòn. -Căn chỉnh lại bộ truyền.
|
|
Mòn ống xích |
-Kẹt con lăn do bôi trơn không tốt. |
-Đảo lại chiều xích và thực hiện bôi trơn định kỳ. |
|
Trượt xích hoặc chồng xích |
-Bánh xích quá bị ăn mòn rang. -Sai bước xích |
-Kiểm tra rang bằng dưỡng biên dạng và thay thế nếu mòn quá cho phép. |
|
Xích có chỗ căng chỗ chùng rõ rệt khi quay 1 vòng |
-Xích mòn không đều. -Bánh xích mòn không đều. -Trục bánh xích đảo |
-Thay xích. -Thay thế hoặc phục hồi bánh xích. -Thay thế trục bánh xích. |
|
Đứt xích |
-Xích đền giới hạn mỏi và không thay thế kiệp thời. -Xích quá căn. -Xích quá chùng, quấn vào vật khác. |
-Định kỳ kiểm tra và thay thế. -Định kỳ căng xích theo hướng dẫn
|
|
Xích nhiều tiếng ồn. |
-Xích chạy quá tốc độ cho phép. -Đồ bộ phằng của 2 bánh xích không đạt, vặn xích. -Bộ truyền đã mòn. |
-Kiểm tra tốc độ cho phép. -Căn chỉnh lại bộ truyền. -Thay bộ truyền mới.
|
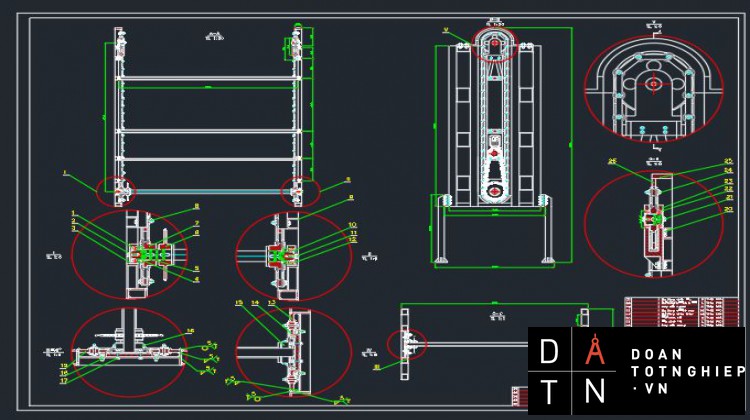
5.2 Các bước tiến hành kiểm tra cho cơ cấu để đảm bảo sự đồng bộ của kết cấu nâng chuyển
- Hướng dẫn lắp ráp và căng chỉnh bộ truyền xích.
- Kiểm tra bánh xích: dùng dưỡng biên dạng (dưỡng biên dạng có thể mua sẵn hoặc tự chế bằng các tấm tôn 0.5mm) kiểm tra biên dạng trên bánh xích và bước vòng trên bánh xích, đảm bảo đúng với các bước xích.
- Kiểm tra độ đồng phẳng của răng xích trên 2 hoặc nhiều bộ bánh xích trên 1 bộ truyền và căn chỉnh.
- Thực hiện căng chỉnh ray dẫn động xích tải trong nhằm đảm bảo khe hở cần thiết cho kết cấu xích tải không bị kẹt hoặc chịu ma sát lớn do sai lệch về tương quan hình học và đồng bộ giữa hai đĩa xích tải.
- Nếu hệ thống con lăn dẫn hướng bị lệch thì cần chỉnh lại cho cân, nếu con lăn quá mòn thì cần phải thay hệ thống con lăn mới.
6. THIẾT KẾ MẠCH ĐIỀU KHIỂN PLC CHO HỆ THỐNG ĐỖ XE XOAY VÒNG
6.1 Tổng quan về bộ điều khiển PLC và các yêu cầu trong vận hành và sử dụng trên phương diện điều khiển bằng PLC
PLC (Programmable Logic Controller) là bộ điều khiển logic lập trình hoạt động theo các phương thức quét các trạng thái trên đầu ra và đầu vào dựa trên các tiêu chí vận hành, hoạt động của kết cấu. Khi có sự thay đổi bất ngờ về thông số đầu vào thì thông số đầu ra vào bộ xử lí sẽ được cập nhật và thay đổi theo.
Mạch điều khiển PLC giống như một máy tính có bộ vi xử lý, hệ điều hành, bộ nhớ để lưu các chương trình giúp trợ giúp trong việc điều khiển, dữ liệu, các cổng ra/vào để kết nối các thành phần điều khiển. Giống như một chương trình của máy tính nên luôn bao gồm các thành phần cơ bản không thể thiếu như: modun nguồn, modun xử lý tín hiệu, modun vào, modun ra, modun nhớ và bộ thiết bị lập trình. Ngoài ra với hệ thống điều khiển bãi đỗ xe thông minh của PLC còn có modun giao tiếp mạng, modun ghép nối các phần chức năng để xử lý tín hiệu như can nhiệt, thành phần điều khiển, công tắc trạng thái, công tắc giới hạn, cảm biến quang điện, cảm biến cấp độ.
Hình 6.1: Sơ đồ nguyên lí thu thập và xử lí số liệu đầu vào của hệ thống bằng PLC
6.2 Các tiêu chí điều khiển trong vận hành và sử dụng của hệ thống dựa nguyên lí làm việc của bộ xử lí PLC
vĐối với cớ cấu chấp hành và nâng chuyển:
Các tiêu chí của hệ thống hoạt động dựa trên bộ xử lí PLC là bộ phận cảm biến xử lí số liệu về thông số chiều cao, chiều dài, chiều rộng của xe ra vào nhắm xác định chiều cao phù hợp. Trong quá trình nâng chuyển, bộ xử lí PLC đóng vai trò trong việc xác định vị trí khung pallet cần lấy và đường di chuyển gần nhất (chiều quay của xích tải) để tiết kiệm thời gian lấy xe và xác định quá tải nhằm dừng khẩn cấp hệ thống. Tùy theo yêu cầu của nhà sản xuất mà hệ thống đỗ xe xoay vòng còn có thể được tích hợp thêm các hệ thống an toàn như:
- Khung hàn thép cường độ cao.
- Thiết bị phát hiện quang điện (cảm biến quang) về kích thước trong không gian của xe.
- Hệ thống cảnh báo âm thanh hoặc đèn led.
- Thiết bị chống rơi điện từ.
- Thiết bị chặn xe.
- Thiết bị bảo vệ xe.
- Thiết bị dừng khẩn cấp.
- Thiết bị bảo vệ nối đất.
- Nâng và trượt thiết bị khóa kết hợp.
vĐối với người sử dụng hệ thống:
Khi vào các bãi đỗ xe thì xe sẽ được đưa vào các khung pallet để xe, vị trí của xe sẽ được cảm biến quang nhận. Nếu xe không đúng kích thước tiêu chuẩn thì chủ xe sẽ được hệ thống báo lại. Khi gửi khách hàng chỉ cần để xe vào phần di chuyển xe của hệ thống và xuống xe và chỉ cần nhấn nút gửi ở bảng điều khiển xe sẽ được hệ thống di chuyển đến ô vị trí còn trống và đèn led sẽ tắt báo hiệu cho người gửi xe sau biết khung pallet đã có xe.
Hình 6.2: Nguyên lí hoạt động và lấy số liệu của cảm biến
Người sử dụng sẽ sử dụng công cụ thẻ từ được cấp sau khi tiến hành gửi và lấy xe với giao diện dễ sử dụng bao gồm các nút cơ bản như sau:
Hình 6.3: Giao diện dành cho người sử dụng quét thẻ và lấy xe của hệ thống
6.3 Ứng dụng phương pháp Grafcet xây dựng sơ đồ nguyên lí mạch điều khiển PLC cho cơ cấu chấp hành của hệ thống đỗ xe xoay vòng
6.3.1 Giới thiệu tổng quan về ngôn ngữ lập trình điều khiển Grafcet trong xây dựng mạch điều khiển:
Grafcet là từ viết tắt của của tiếng Pháp “Graphe fonctionnel de commande e’tape transition” (chuỗi các chức năng điều khiển giai đoạn chuyển tiếp), mạng Grafcet đã được tiêu chuẩn hóa và công nhận là một ngôn ngữ thích hợp cho việc mô tả hoạt động dãy của quá trình tự động hóa trong sản xuất.
Mạng grafcet là một đồ hình chức năng cho phép mô tả các trạng thái làm việc của hệ thống và biểu diễn quá trình điều khiển với các trạng thái và sự chuyển đổi từ trạng thái này sang trạng thái khác, đó là một đồ hình định hướng được xác định bởi các phần tử là: tập các trạng thái, tập các điều kiện chuyển trạng thái.
Một trạng thái giai đoạn được biểu diễn bằng một hình vuông có đánh số thứ tự chỉ trạng thái. Gắn liền với biểu tượng trạng thái là một hình chữ nhật bên cạnh, trong hình chữ nhật có ghi các tác động của trạng thái đó. Một trạng thái có thể tương ứng với một hoặc nhiều hành động của quá trình.







