HỆ THỐNG TỰ ĐỘNG ĐIỀU KHIỂN MÁY ẤP TRỨNG

NỘI DUNG ĐỒ ÁN
100 MB Bao gồm tất cả file step, file Orcad..ASM, HEX file mô phỏng DSN.OPJ MAX... thuyết minh, quy trình sản xuất, bản vẽ nguyên lý HỆ THỐNG TỰ ĐỘNG ĐIỀU KHIỂN MÁY ẤP TRỨNG , bản vẽ thiết kế mạch HỆ THỐNG TỰ ĐỘNG ĐIỀU KHIỂN MÁY ẤP TRỨNG , FILE lập trình HỆ THỐNG TỰ ĐỘNG ĐIỀU KHIỂN MÁY ẤP TRỨNG , và nhiều tài liệu liên quan kèm theo đồ án này
LỜI NÓI ĐẦU
Ngày nay, máy tính và tự động hóa sản xuất đang thâm nhập vào rất nhiều lĩnh vực. Không chỉ trong công nghiệp, nông nghiệp của nước ta cũng đã bắt đầu xuất hiện các hệ thống chuồng trại, nhà máy, máy móc thiết bị yêu cầu tính tự động ngày càng cao. Hình ảnh một nền nông nghiệp với “ con trâu đi trước cái cày theo sau” không lâu nữa sẽ được thay thế.
Xu thế tất yếu của một nền nông nghiệp cần phải có sản lượng lớn và giá cả cạnh tranh hơn chính là ứng dụng các sản phẩm của khoa học công nghệ. Ngay cả một ngành truyền thống lâu này là ngành chăn nuôi gia cầm cũng đang từng bước có nhiều thay đổi.
Máy ấp trứng với qui mô vài trăm trứng tới vài ngàn trứng đang thay thế dần phương pháp ấp truyền thống vốn có qui mô không lớn.
Từ những vần đề trên, với vốn kiến thức đã được học tại trường và sự hướng dẫn tận tình của thầy Lê Thanh Đạo, nhóm sinh viên quyết định thực hiện đề tài “HỆ THỐNG TỰ ĐỘNG ĐIỀU KHIỂN MÁY ẤP TRỨNG”.
Tuy nhiên vì thời gian có hạn và kiến thức chuyên môn còn hạn chế nên trong quá trình thực hiện đồ án không thể tránh những thiếu sót nhất định. Những người thực hiện rất mong sự giúp đỡ, ý kiến đóng góp của quý thầy cô cùng tất cả các bạn để đồ án tốt nghiệp này được hoàn thiện hơn.
MỤC LỤC
Trang
Phần A Giới thiệu
Phân công cán bộ hướng dẫn và cán bộ phản biện............................................................ ii
Nhiệm vụ đồ án tốt nghiệp................................................................................................... iii
Nhận xét của giáo viên hướng dẫn...................................................................................... iv
Nhận xét của giáo viên phản biện........................................................................................ v
Lời nói đầu............................................................................................................................. vi
Lời cảm ơn............................................................................................................................. vii
Mục lục................................................................................................................................. viii
Liệt kê bảng............................................................................................................................ ix
Liệt kê hình.................................................................................................... x
Phần B Nội dung
Chương 1 Dẫn nhập
- Đặt vấn đề......................................................................................................................... 3
- Tầm quan trọng của vấn đề............................................................................................ 3
- Giới hạn đề tài.................................................................................................................. 3
- Mục đích nghiên cứu........................................................................................................... 4
Chương 2 Cơ sở lý luận
2.1 Tổng quan về máy ấp trứng............................................................................................ 6
2.2 Hệ thống thu thập dữ liệu................................................................................................ 6
2.2.1 Giới thiệu.............................................................................................................. 6
2.2.2 Bộ chuyển đổi dữ liệu....................................................................... 7
2.2.3 Các mạch điện xử lý............................................................................................ 8
2.2.4 Mạch đa hợp dữ liệu............................................................................................ 8
2.2.5 Mạch lấy mẫu và giữ........................................................................................... 8
2.2.6 Mạch chuyển đổi ADC............................................................................... 9
2.2.6.1 Mạch chuyển đổi điện áp sang tần số................................................... 9
2.2.6.2 Mạch chuyển đổi hàm dốc................................................................... 10
2.2.6.3 Mạch chuyển đổi xấp xỉ liên tục......................................................... 11
2.2.7 Hệ thống thu thập dữ liệu một kênh................................................................ 11
2.2.8 Truyền dữ liệu.................................................................................................... 11
2.3 Bộ chuyển đổi tương tự sang số ADC......................................................................... 12
2.3.1 Phân loại ADC.................................................................................................... 12
2.3.2 Các đại lượng quan hệ của bộ biến đổi.......................................................... 12
2.4 Đo nhiệt độ..................................................................................................................... 13
2.4.1 Giới thiệu............................................................................................................ 13
2.4.2 IC đo nhiệt độ..................................................................................................... 13
2.4.3 Một số IC đo nhiệt độ thông dụng................................................................... 14
2.5 Các chuẩn giao tiếp máy tính....................................................................................... 15
2.5.1 Giao tiếp máy tính qua cổng song song.......................................................... 15
2.5.2 Giao tiếp máy tính qua cổng nối tiếp RS 232 ( COM)................................. 15
2.5.3 Giao tiếp máy tính qua khe cắm mở rộng ( Slot Card)................................. 16
2.5.4 Giao tiếp máy tính qua cổng nối tiếp đa năng USB...................................... 16
2.6 Ngôn ngữ giao tiếp máy tính........................................................................................ 16
2.6.1 Sơ lược về các ngôn ngữ lập trình................................................................... 16
2.6.2 Chọn ngôn ngữ lập trình................................................................................... 17
2.7 Đường truyền RS-485.................................................................................................... 18
2.7.1 Giới thiệu............................................................................................................ 18
2.7.2 Đặc điểm RS-485............................................................................................... 18
2.7.3 Một số đặc tính RS-485.................................................................................... 18
2.7.3.1 Đường truyền cân bằng và không cân bằng....................................... 18
2.7.3.2 Ưu điểm của đường truyền cân bằng.................................................. 19
2.7.4 Nguyên tắc hoạt động của RS-485.................................................................. 20
2.7.4.1 Mức áp yêu cầu...................................................................................... 19
2.7.4.2 Dòng yêu cầu......................................................................................... 21
2.7.5 Kết nối mạng với chuẩn RS-485...................................................................... 21
2.7.5.1 Song công (Full-Duplex)...................................................................... 21
2.7.5.2 Bán song công........................................................................................ 22
Chương 3 Giới thiệu linh kiện sử dụng
3.1 Vi điều khiển 89s52...................................................................................................... 24
3.1.1 Đặc điểm............................................................................................................. 24
3.1.2 Sơ đồ chân 89s52............................................................................................... 24
3.1.3 Chức năng các chân........................................................................................... 24
3.1.3.1 Chức năng các Port................................................................................ 24
3.1.3.2 Các ngõ tín hiệu điểu khiển................................................................. 25
3.1.4 Cấu trúc bên trong............................................................................................. 26
3.1.4.1 Tổ chức bộ nhớ...................................................................................... 26
3.1.4.2 Ram đa dụng........................................................................................... 27
3.1.4.3 Ram có thể truy xuất từng bit.............................................................. 27
3.1.4.4 Các bank thanh ghi................................................................................ 27
3.1.4.5 Các thanh ghi có chức năng đặc biệt.................................................. 28
3.1.4.6 Hoạt động TIMER.................................................................................. 31
3.1.4.7 Ngắt (INTERRUPT)............................................................................... 34
3.2 Cảm biến nhiệt độ LM 35............................................................................................. 35
3.3 ADC 0809....................................................................................................................... 36
3.4 MAX 232......................................................................................................................... 39
3.5 IC 75176.......................................................................................................................... 40
Chương 4 Thiết kế-thi công
4.1 Thiết kế phần cứng........................................................................................................ 42
4.1.1 Thiết kế hệ thống............................................................................................... 42
4.1.1.1 Module Master....................................................................................... 42
4.1.1.2 Module Slave......................................................................................... 42
4.1.1.3 Kết nối hệ thống.................................................................................... 43
4.1.2 Thiết kế chi tiết.................................................................................................. 43
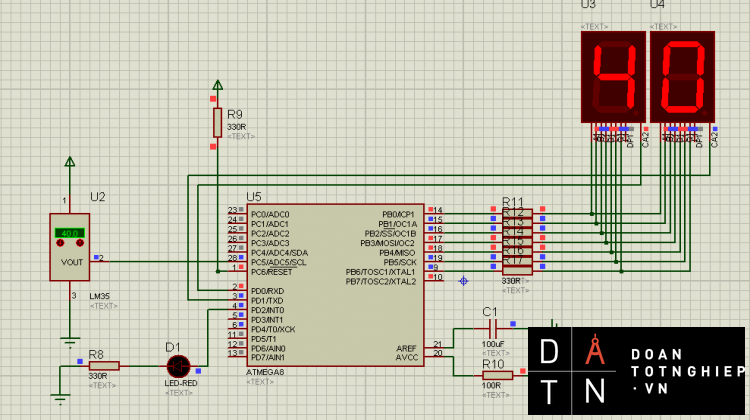
4.1.2.1 Mạch ADC-Vi điều khiển.................................................................... 43
4.1.2.2. Mạch hiển thị........................................................................................ 45
4.1.2.3 Mạch giao tiếp chuẩn RS-485 và TTL................................................ 46
4.1.2.4 Mạch giao tiếp máy tính....................................................................... 47
4.1.2.5 Mạch nguồn............................................................................................ 48
4.1.3 Sơ đồ mạch......................................................................................................... 49
4.1.3.1 Sơ đồ nguyên lý Module Master......................................................... 50
4.1.3.2 Sơ đồ nguyên lý Module Slave............................................................ 51
4.2 Thiết kế phần mềm........................................................................................................ 52
4.2.1 Xây dựng chương trình cho vi điều khiển...................................................... 52
4.2.1.1 Lưu đồ chương trình của Module Master.......................................... 52
4.2.1.2 Lưu đồ chương trình của Module Slave............................................. 53
4.2.2 Xây dựng phần mềm cho máy tính.................................................................. 55
Chương 5 Kết luận
5.1 Tóm tắt đề tài.................................................................................................................. 57
5.2 Hướng phát triển đề tài.................................................................................................. 57
5.3 Kết luận........................................................................................................................... 57
Phần C Phụ lục-Tài liệu tham khảo
Phụ lục A: Yêu cầu kỹ thuật cho trứng gà trong quá trình ấp........................................ 59
Phụ lục B: Hình ảnh máy ấp trứng..................................................................................... 60
Phụ lục C: Sơ đồ bố trí linh kiện các Module.................................................................. 61
LIỆT KÊ BẢNG
Bảng 3.1 Chức năng chân của Port 3................................................................................. 25
Bảng 3.2 Chức năng bit của thanh ghi trạng thái............................................................. 28
Bảng 3.3 Trạng thái các thanh ghi sau khi Reset............................................................. 31
Bảng 3.4 Chức năng 6 thanh ghi đặc biệt.......................................................................... 32
Bảng 3.5 Chức năng bit của thanh ghi TMOD.................................................................. 32
Bảng 3.6 Chức năng bit của thanh ghi TCON................................................................... 33
Bảng 3.7 Chức năng bit của thanh ghi IE.......................................................................... 35
Bảng 3.8 Vị trí các cờ báo cho phép ngắt......................................................................... 35
Bảng 3.9 Vị trí các Vector ngắt.......................................................................................... 36
Bảng 3.10 Trạng thái các ngõ vào chọn kênh và ngõ ra được chọn.............................. 37
LIỆT KÊ HÌNH
Hình 2.1 Cấu trúc của hệ thống thu thập dữ liệu............................................................... 7
Hình 2.2 Sơ đồ khối của bộ chuyển đổi dữ liệu................................................................. 8
Hình 2.3 Mạch lấy mẫu và giữ.............................................................................................. 9
Hình 2.4 Sơ đồ khối mạch chuyển đổi điện áp sang tần số.............................................. 9
Hình 2.5 Sơ đồ khối của mạch chuyển đổi ADC hàm dốc............................................. 10
Hình 2.6 Sơ đồ khối của mạch chuyển đổi ADC xấp xỉ liên tục................................... 11
Hình 2.7 Sơ đồ khối của hệ thống chuyển đổi 1 kênh.................................................... 11
Hình 2.8 Sơ đồ quan hệ In-out của ADC........................................................................... 12
Hình 2.9 Đường truyền cân bằng....................................................................................... 18
Hình 2.10 Đường truyền không cân bằng......................................................................... 18
Hình 2.11 Ngõ ra của bộ phát RS-485............................................................................... 19
Hình 2.12 Ngõ ra vi sai của bộ phát.................................................................................. 19
Hình 2.13 Kết nối song công nhiều điểm.......................................................................... 20
Hình 3.1 Sơ đồ chân 89s52................................................................................................. 24
Hình 3.2 Tổ chức bộ nhớ 89s52......................................................................................... 26
Hình 3.3 Sơ đồ chân LM 35................................................................................................ 36
Hình 3.4 Sơ đồ chân ADC 0809......................................................................................... 37
Hình 3.5 Sơ đồ chân MAX232........................................................................................... 39
Hình 3.6 Sơ đồ chân 75176................................................................................................. 40
Hình 4.1 Sơ đồ khối Module Master................................................................................. 42
Hình 4.2 Sơ đồ khối Module Slave.................................................................................... 43
Hình 4.3 Sơ đồ kết nối hệ thống......................................................................................... 43
Hình 4.4 Sơ đồ nguyên lý khối ADC-Vi điều khiển........................................................ 44
Hình 4.5 Mạch dao động thư giãn...................................................................................... 45
Hình 4.6 Sơ đồ nguyên lý khối hiển thị............................................................................ 45
Hình 4.7 Sơ đồ nguyên lý mạch giao tiếp chuẩn RS-485 và TTL................................. 46
Hình 4.8 Sơ đồ nguyên lý Module giao tiếp máy tính.................................................... 48
Hình 4.9 Sơ đồ nguyên lý khối nguồn............................................................................... 49
Hình 4.10 Sơ đồ nguyên lý Module Master...................................................................... 50
Hình 4.11 Sơ đồ nguyên lý Module Slave........................................................................ 51
Hình 4.12 Lưu đồ chương trình chính Module Master................................................... 52
Hình 4.13 Lưu đồ chương trình ngắt nhận dữ liệu của Module Master....................... 53
Hình 4.14 Lưu đồ chương trình chính của Module Slave.............................................. 54
Hình 4.15 Lưu đồ điều khiển tải của Module Slave........................................................ 55
1.1 Đặt vấn đề
Ngày nay với sự phát triển mạnh mẽ của khoa học máy tính và điện tử đã hỗ trợ rất lớn đến sự ra đời và phát triển của công nghệ tự động. Công cuộc tự động hóa đã tạo ra một bước ngoặt trong quá trình sản xuất cũng như sinh hoạt của con người. Các máy móc dần dần thay thế sức lao động tay chân của con người, thực hiện các công việc phức tạp và tốn nhiều công sức thay cho con người với hiệu quả và khối lượng công việc rất cao.
Công việc ấp trứng gia cầm vốn được làm thủ công yêu cầu phải thực hiện nhiều thao tác liên tục trong nhiều ngày đêm với sự giám sát chặt chẽ các yếu tố về nhiệt độ, độ ẩm, độ thông thoáng khí…
Máy ấp trứng là sản phẩm tự động hóa tất yếu ra đời để thay thế con người trong công việc này. Với sự có mặt của kỹ thuật điện tử, chiếc máy ấp trứng không chỉ hoạt động độc lập và chính xác trong thời gian dài. Nó còn giao tiếp được với máy tính để giúp người giám sát nắm được các thông số cũng như cài đặt các yêu cầu một cách đơn giản.
Ngày nay kỹ thuật vi điều khiển đã trở nên quen thuộc trong các ngành kỹ thuật và trong dân dụng. Từ các dây chuyền sản xuất lớn đến các thiết bị gia dụng, chúng ta đều thấy sự hiện diện của vi điều khiển. Các bộ vi điều khiển có khả năng xử lý nhiều hoạt động phức tạp mà chỉ cần một chip vi mạch nhỏ, nó đã thay thế các tủ điều khiển lớn và phức tạp bằng những mạch điện gọn nhẹ, dễ dàng thao tác sử dụng.
Với hoàn cảnh cụ thể, nhu cầu thực tiễn đề ra và với sự hướng dẫn tận tình của thầy LÊ THANH ĐẠO nhóm tiến hành thực hiện đề tài : “HỆ THỐNG TỰ ĐỘNG ĐIỀU KHIỂN MÁY ẤP TRỨNG”
1.2 Tầm quan trọng của vấn đề
Trên thực tế ở nước ta, nhiều loại máy ấp, máy nở hiện đại nhập vào từ Hà Lan, Bỉ, Mỹ, Hungari, Trung Quốc, tỷ lệ ấp nở trứng gà đạt trên 80% so với số trứng vào ấp. Công suất các loại máy từ ấp vài trăm quả trứng cho các gia đình, phòng thí nghiệm, đến loại máy to hàng nghìn, vạn, chục vạn quả cho các trạm ấp lớn, hầu hết là tự động. Một số cán bộ kỹ thuật đã tự đóng được máy ấp loại nhỏ và vừa bằng vật tư trong nước, chỉ nhập một số bộ phận quan trọng của nước ngoài, loại máy này có giá thành thấp hơn máy nhập.
Quy trình ấp chủ yếu là điều khiển máy, đảm bảo chế độ nhiệt và chế độ ẩm, độ thông thoáng, đảo trứng . . . trong suốt 21 ngày ấp cho trứng gà.
Trong khuôn khổ của một đề tài tốt nghiệp, tuy các vấn đề về kĩ thuật không phải là mới mẻ ( khống chế nhiệt độ, giao tiếp máy tính…), nhóm thực hiện muốn xây dựng một sản phẩm gần gũi với thực tế cuộc sống và góp phần đưa những kĩ thuật hiện đại vào sản xuất nông nghiệp.
1.3 Giới hạn đề tài
Do những hạn chế về mặt thời gian và kinh phí, nhóm thực hiện đề tài chỉ xây dựng một hệ thống mạch điều khiển cho máy ấp trứng có các đặc điểm sau đây:
- Một Module Master giao tiếp trung gian giữa các máy ấp và máy tính, có chức năng điều khiển chung khi tắt máy tính.
- 2 Module Slave có chức năng làm bộ điều khiển của 2 máy ấp trứng, có chức năng điểu khiển và hiển thị các trạng thái của máy: nhiệt độ hiện thời, trạng thái của dàn đảo trứng, trạng thái của thanh tỏa nhiệt, trạng thái của quạt thông gió.
- Hệ thống giao tiếp qua chuẩn RS 232 với máy tính và dùng đường truyền chuẩn RS 485.
1.4 Mục đích nghiên cứu
- Củng cố lại kiến thức về lập trình vi điều khiển, các IC chuyển đổi, lập trình Delphi, bên cạnh đó là mở rộng thêm mảng các chuẩn truyền dữ liệu.
- Tìm hiểu môi trường ứng dụng thực tế của kỹ thuật điện tử. Qua đó có hình dung sơ bộ về môi trường công việc.
- Xây dựng một sản phẩm có tính ứng dụng.
Chương 2
Cơ sở lý luận
2.1 Tổng quan về máy ấp trứng
Dựa trên các yếu tố của việc ấp trứng tự nhiên do gia cầm thực hiện. Máy ấp trứng đưa ra các giải pháp kĩ thuật tương tự. Với các ưu thế hơn hẳn về sản lượng ấp cho một mẻ trứng. Trong đề tài này, nhóm thực hiện xin giới thiệu về chiếc cấu trúc tổng quát của máy ấp trứng được nhóm tổng kết sau quá trình tham quan thực tế và tham khảo tài liệu.
Các loại trứng gia cầm khác có các yêu cầu khác nhau về nhiệt độ, độ ẩm và thời gian ấp nở.Về cơ bản, máy ấp trứng tự động gồm bốn khâu: nhiệt độ, đảo trứng, độ ẩm và thông gió, các thông số kỹ thuật đều được điều chỉnh bằng mạch bán dẫn và vi điện tử. Để có giống mạnh khoẻ, tỷ lệ nở cao, máy phải giải quyết được triệt để bốn khâu trên.
Khâu nhiệt đóng vai trò quan trọng nhất, quả trứng ấp không đủ nhiệt thì phôi sẽ không phát triển. Để giữ nhiệt, các vỏ máy được thiết kế dày và có chức năng cách ly tốt, góp phần lưu nhiệt khi mất điện. Trong máy có các hệ thống dây điện trở, có chức năng sinh nhiệt, mỗi dây có công suất tùy thuộc vào thể tích của lồng ấp. Để đóng, ngắt mạch điện và dây điện trở sinh nhiệt, có thể sử dụng rơle điện tử không tiếp điểm, dùng tri-ắc công suất lớn, bộ đóng ngắt hoạt động với độ tin cậy cao.
Khâu đảo trứng là khâu thứ hai trong quá trình ấp. Thông thường trứng được đảo vài giờ một lần, một lần kéo dài khoảng 10 phút. Việc đảo trứng thực hiện chậm vì tránh hiện tượng va đập làm hư trứng. Dàn đảo sẽ đảo với một góc không quá 60o hoặc thấp hơn tùy vào thiết kế của giá để trứng.
Một quả trứng bình thường chứa 6,5% đến 6,6% lượng nước. Trong quá trình tiếp nhiệt độ để phát triển thành con giống, lượng nước sẽ bị bay hơi dần. Máy ấp trứng phải có hệ thống cung cấp độ ẩm tự động và điều chỉnh được tuỳ ý. Thông thường máy ấp có giàn phun nước tự động để giữ cho độ ẩm không thay đổi tùy thuộc vào từng giai đoạn của trứng.
Thông gió là phần không thể thiếu trong quá trình ấp. Các quạt thông gió phải gắn với cửa chớp mở tự động mỗi khi quạt hoạt động. Việc gắn với cửa chớp là để đảm bảo việc cách ly với môi trường bên ngoài, đảm bảo việc giữ nhiệt. Việc thông gió có thể kết hợp với việc giảm nhiệt cho máy ấp.
2.2 Hệ thống thu thập dữ liệu
2.2.1 Giới thiệu
Một hệ thống thu thập dữ liệu bao gồm:
- Các cảm biến.
- Chuyển đổi dữ liệu.
- Xử lý dữ liệu.
- Đa hợp dữ liệu.
- Truyền dữ liệu.
- Xử lý tính toán dữ liệu.
- Lưu trữ dữ liệu.
- Hiển thị dữ liệu.
Cấu trúc của hệ thống thu nhận dữ liệu như hình 2.1
Hình 2.1 Cấu trúc của hệ thống thu thập dữ liệu.
Các thông số để đánh giá một hệ thống thu thập dữ liệu:
- Độ chính xác và độ phân giải của hệ thống.
- Số lượng các kênh kiểm tra – thu nhận dữ liệu.
- Tín hiệu thu thập dạng tương tự hay số.
- Từng kênh riêng lẻ hay đa hợp nhiều kênh.
- Tốc độ lấy mẫu của mỗi kênh.
- Các yêu cầu về tín hiệu của mỗi kênh.
- Giá thành chi phí cho một hệ thống.
Có hai cấu hình cho các hệ thống thu thập dữ liệu:
- Hệ thống thu thập dữ liệu một kênh: trong hệ thống này sẽ có nhiều cấu hình khác nhau như:
• Cấu hình chuyển đổi trực tiếp tín hiệu.
• Cấu hình gồm mạch khuếch đại và chuyển đổi trực tiếp tín hiệu.
• Cấu hình gồm mạch lấy mẫu và giữ và chuyển đổi tín hiệu.
• Mạch khuếch đại - xử lý tín hiệu - chuyển đổi tín hiệu.
- Hệ thống thu thập dữ liệu nhiều kênh: trong hệ thống này sẽ có nhiều cấu hình khác nhau như:
• Đa hợp các ngõ ra của các bộ chuyển đổi từng kênh riêng lẻ.
• Đa hợp các ngõ ra của các bộ lấy mẫu và giữ.
• Đa hợp các ngõ vào của các bộ lấy mẫu và giữ.
• Đa hợp các dữ liệu mức thấp.
2.2.2 Bộ chuyển đổi dữ liệu
Dạng dữ liệu thu nhận của hệ thống thường là tín hiệu tương tự từ các thông số vật lý không điện hay còn gọi là đại lượng không điện (như nhiệt độ, áp suất, tốc độ quay của động cơ…). Chức năng của bộ chuyển đổi là chuyển tín hiệu không điện thành tín hiệu điện tương ứng. Sơ đồ khối của bộ chuyển đổi như hình 2.2.
Hình 2.2 Sơ đồ khối của bộ chuyển đổi dữ liệu.
Chức năng cơ bản của bộ chuyển đổi trong hệ thống thu thập dữ liệu là:
1. Nhận biết sự hiện diện, biên độ, sự thay đổi và tần số của đại lượng cần đo.
2. Tạo ra tín hiệu điện ở ngõ ra của bộ chuyển đổi với các dữ liệu định lượng chính xác của đại lượng cần đo.
Các bộ chuyển đổi thường được phân loại theo nguyên lý hoạt động bao gồm:
1. Bộ chuyển đổi thụ động, phải có nguồn cung cấp từ bên ngoài.
2. Bộ chuyển đổi tự tạo ra tín hiệu không cần nguồn cung cấp bên ngoài.
2.2.3 Các mạch điện xử lý
Tín hiệu ngõ ra của bộ chuyển đổi thường chưa tương thích với các ngõ vào của hệ thống chuyển đổi dữ liệu như về biên độ tín hiệu và sự chuyển đổi tuyến tính của tín hiệu, do đó cần phải có các mạch điện xử lý để tăng hoặc giảm biên độ và cải thiện sự tuyến tính của tín hiệu.
Các dạng mạch xử lý bao gồm:
- Mạch đệm.
- Mạch lọc.
- Mạch thay đổi mức tín hiệu.
- Mạch chuyển đổi tín hiệu.
- Mạch tuyến tính hóa tín hiệu.
2.2.4 Mạch đa hợp dữ liệu
Mạch đa hợp là các mạch điện tử có hai hoặc nhiều ngõ vào và chỉ có một ngõ ra duy nhất. Khi có nhiều kênh dữ liệu cần chuyển đổi và nếu mạch chuyển đổi ADC chỉ có một ngõ vào thì chúng ta phải dùng bộ đa hợp các ngõ vào để có thể chuyển đổi được nhiều kênh và các kênh chuyển đổi được phân chia theo thời gian. Khi sử dụng mạch đa hợp thì phải có tín hiệu điều khiển để chọn kênh Các vi mạch ADC sau này tích hợp luôn cả mạch đa hợp bên trong.
2.2.5 Mạch lấy mẫu và giữ
Mạch lấy mẫu và giữ chính là mạch nhớ điện áp có chức năng lưu trữ điện áp trong một tụ điện chất lượng cao. Hoạt động của mạch lấy mẫu và giữ là thực hiện việc lấy mẫu trong khoảng thời gian ngắn và giữ nguyên giá trị điện áp đó cho mạch chuyển đổi ADC xử lý.
Hình 2.3. Mạch lấy mẫu và giữ (sample and hold).
Mạch khuếch đại A1 là mạch khuếch đại đệm có tổng trở vào lớn (để không làm ảnh hưởng đến tầng trước) và tổng trở ra nhỏ để quá trình nạp của tụ xảy ra nhanh.
Switch S1 có thể hoạt động đóng ngắt nhanh sử dụng loại CMOS. Tụ C phải có dòng rỉ nhỏ để không làm giảm điện áp trong quá trình lưu trữ. Tầng khuếch đại A2 cũng chính là mạch khuếch đại đệm có tổng trở vào cực lớn để tụ không thể xả điện hoặc xả không đáng kể trong quá trình chờ khối ADC chuyển đổi xong.
2.2.6 Mạch chuyển đổi ADC
Các dạng mạch chuyển đổi ADC cơ bản: chuyển đổi điện áp sang tần số, mạch chuyển đổi hàm dốc và mạch chuyển đổi sấp xỉ gần đúng.
2.2.6.1 Mạch chuyển đổi điện áp sang tần số
Là một kỹ thuật thường được dùng để chuyển đổi điện áp ngõ vào thành dạng sóng có chu kỳ với tần số tỷ lệ với biện độ điện áp ở ngõ vào.
Hình 2.4 Sơ đồ khối mạch chuyển đổi điện áp sang tần số.
2.2.6.2 Mạch chuyển đổi hàm dốc
Cấu trúc của mạch ADC hàm dốc như hình và dạng sóng của quá trình chuyển đổi như hình 2.5
Hình 2.5 Sơ đồ khối của mạch chuyển đổi ADC hàm dốc.
Hoạt động của mạch: khi bắt đầu quá trình chuyển đổi thì mạch điều khiển sẽ reset bộ đếm về 0 và điện áp ngõ ra bộ chuyển đổi DAC tương ứng bằng 0 V.
Khi điện áp ngõ vào tăng thì ngõ ra của mạch so sánh Op-amp ở mức High - cổng AND cho phép xung clock vào mạch đếm và điện áp ngõ ra của mạch DAC tăng dần theo giá trị đếm, quá trình xảy ra cho đến khi giá trị điện áp ngõ ra của bộ DAC lớn hơn điện áp tín hiệu ở ngõ vào thì ngõ ra mạch so sánh Op-amp chuyển trạng thái xuống mức Low, cổng AND không cho phép xung clock vào mạch đếm và mạch đếm ngừng – giá trị số ở ngõ ra mạch đếm chính là giá trị số tương ứng với giá trị điện áp ở ngõ vào.
Dạng sóng điện áp ngõ ra của bộ DAC có dạng bậc thang liên tục như hàm dốc nên gọi mạch chuyển đổi ADC hàm dốc.
2.2.6.3 Mạch chuyển đổi xấp xỉ liên tục
Mạch chuyển đổi ADC sấp xỉ gần đúng là một kỹ thuật thường được sử dụng rộng vì thời gian chuyển đổi nhanh.
Hình 2.6 Sơ đồ khối của mạch chuyển đổi ADC xấp xỉ liên tục
2.2.7 Hệ thống thu thập dữ liệu một kênh
Hình 2.7 Sơ đồ khối của hệ thống chuyển đổi 1 kênh
Cấu trúc của hệ thống thu thập dữ liệu một kênh như hình 2.13 bao gồm khối ADC - khối khuếch đại đệm - dữ liệu sau khi chuyển đổi được đưa đến khối xử lý.
2.2.8 Truyền dữ liệu
Dữ liệu được truyền từ các modul thu thập lên máy tính để xử lý
Các yêu cầu về truyền dữ liệu:
Cách thức giao tiếp với máy tính (COM, LPT, USB, SLOT CARD, MODEM…).
Tốc độ truyền dữ liệu.
Khoảng cách truyền
Độ chính xác, sai số.
Yêu cầu tốc độ truyền dữ liệu là quan trọng nhất trong các hệ thống thu thập dữ liệu thực Real-Time.
2.3 Bộ chuyển đổi tương tự sang số ADC
2.3.1 Phân loại ADC
Dựa vào số lượng kênh chuyển đổi thì có hai loại ADC:
- Đa hợp nhiều ngõ vào, chính là ADC một ngõ vào kết hợp với mạch đa hợp để có thể chuyển đổi được nhiều kênh; khi đó nó sẽ có nhiều đường nhận tín hiệu tương tự ngõ vào và các đường điều khiển chọn kênh, điều khiển chuyển đổi.
- ADC chuyển đổi liên tục chỉ có một kênh, không cần tín hiệu điều khiển.
2.3.2 Các đại lượng quan hệ của bộ biến đổi ADC
- Quan hệ In-Out
Biến đổi AD có tính chất tỉ lệ. Tín hiệu vào Analog được biến đổi thành một phân số X bằng cách so sánh với tín hiệu tham chiếu Vref. Đầu ra của bộ ADC là mã của phân số này. Bất kỳ một sai số tín hiệu Vref nào cũng sẽ dẫn đến sai số mức ra, vì vậy người ta cố gắng giữ cho Vref càng ổn định càng tốt.
Hình 2.8 Sơ đồ quan hệ in-out của ADC
- Quan hệ vào ra các khối ADC
Nếu bộ ADC xuất mã ra gồm n bit thì số mức ra rời rạc là 2n. Đối quan hệ tuyến tính, tần vào được lượng tử hóa theo đúng mức này. Mỗi mức như vậy là một tín hiệu Analog được phân biệt với hai mã kế tiếp nhau, nó chính là kích thước của LSB (Least Significant Bit).
Trong đó : Q : Lượng tử
LSB : bit có trọng số thấp nhất
FS : giá trị toàn thang
Tất cả các giá trị Analog của lượng tử Q được biểu diễn bởi mã số, mà mã này tương ứng với giá trị trung bình của lượng tử (có thể hiểu là giữa khoảng LSB) gọi là mức ngưỡng. Các giá trị Analog nằm trong khoảng từ mức ngưỡng sai biệt đi ± ½ LSB vẫn được thể hiện bằng cùng một mãù, đó là sai số lượng tử hóa. Sai số này có thể sẽ giảm đi bằng cách tăng số bit trong mã ra bộ ADC.
- Độ phân giải
Là giá trị biến đổi nhỏ nhất của tín hiệu vào ra được yêu cầu để thay đổi mã lên một mức. Độ phân giải được đưa ra với giả thiết lý tưởng.
- Độ chính xác
Sự sai biệt giữa các giá trị điện áp tín hiệu vào so với giá trị FS tương đương với mã xuất ra. Thường có ghi trong đặc tính của các bộ ADC thương mại.
- ADC
Tùy theo công nghệ chế tạo mà bộ ADC có đầu vào đơn cực hay lưỡng cực, đa số nằm trong khoảng 0…5V hoặc 0…10V đối với đơn cực và -5…+5V hoặc –10V…+10V đối với ADC lưỡng cực. Tín hiệu vào cần phù hợp với tầm vào xác định cho từng bộ ADC. Nếu đầu vào không hết thang sẽ tạo mã vô dụng ở đầu ra. Vấn đề này được giải quyết bằng cách chọn tầm đầu vào bộ ADC sau đó chỉnh độ lợi thích hợp cho đầu vào của nguồn Analog.
Khi sử dụng bộ ADC đơn cực mà có tín hiệu vào là lưỡng cực trong khoảng ±VP-P thì ta cần phải cộng điện áp vào Vi với một điện áp nền bằng +Vpp, khi đó ta sẽ có Vi nằm trong khoảng 0…+2VP-P; tín hiệu này sẽ được đưa tới đầu vào bộ ADC. Nếu sử dụng ADC lưỡng cực thì không cần cộng tín hiệu và đầu ra ta sẽ nhận được mã lưỡng cực.
- Đầu ra bộ ADC
Đa số các ADC có đầu ra 8 Bits, 12 Bits, 16 Bits … dù vậy cũng có loại 3½ Digit, mã BCD, 10 Bits, 14 Bits. Đầu các bộ ADC thường là mã nhị phân tự nhiên hoặc có dấu. ADC dùng cho máy đo chỉ thị số đa dụng thường là mã BCD.
- Tín hiệu tham chiếu Vref
Mọi ADC đều yêu cầu có tín hiệu Vref. Bất kỳ một sai số nào trên Vref đều gây ra lỗi độ lợi ở đặc tính của AD. Vì vậy Vref là tín hiệu đảm bảo độ chính xác và ổn định của bộ AD. Dùng IC ổn áp có thể thỏa mãn điều này. Một số ADC mới còn tích hợp cả tín hiệu Vref ở bên trong chip.
- Tín hiệu điều khiển
Mọi bộ ADC đều có tính xung Clock và tín hiệu điều khiển để hoạt động. Thiết bị ngoài giao tiếp với ADC sẽ khởi động quá trình AD bằng cách phát một xung Start vào đầu vào Start của ADC, ADC bắt đầu chuyển đổi tín hiệu tương tự thành tín hiệu số. Bộ ADC sẽ phát tín hiệu báo sau khi việc chuyển đổi hoàn tất.
2.4 Đo nhiệt độ
2.4.1 Giới thiệu
Đo nhiệt độ là một phương thức đo lường không điện,đo nhiệt độ được chia thành nhiều dãi:
- Đo nhiệt độ thấp
- Đo nhiệt độ trung bình
- Đo nhiệt độ cao.
Việc đo nhiệt độ được tiến hành nhờ các dụng cụ hổ trợ chuyên biệt như:
- Cặp nhiệt điện
- Nhiệt kế điện kế kim loại
- Nhiệt điện trở kim loại
- Nhiệt điện trở bán dẫn
- Cảm biến thạch anh.
2.4.2 IC đo nhiệt độ
Kỹ thuật vi điện tử cho phép chế tạo được những mạch kết nối gồm những transistor giống nhau được sử dụng để làm cảm biến hoàn hảo đo nhiệt độ dựa vào việc đo sự khác biệt điện áp VBE dưới tác động của nhiệt độ. Các cảm biến này tạo ra các dòng điện hặc điện áp tỷ lệ với nhiệt độ tuyệt đối, với độ tuyến tính cao, nó có điều lợi là vận hành đơn giản, tuy nhiên phạm vi hoạt động giới hạn chỉ trong khoảng –50oC đến 150oC.
IC đo nhiệt độ là một mạch tích hợp nhận tín hiệu nhiệt độ chuyển thành tín hiệu điện dưới dạng dòng điện hay điện áp.Dựa vào đặc tính rất nhạy của các bán dẫn với nhiệt độ,tạo ra điện áp hoặc dòng điện,tỉ lệ thuận với nhiệt độ tuyệt đối.Đo tín hiệu điện ta biết được giá trị của nhiệt độ cần đo.Sự tác động của nhiệt độ tạo ra điện tích tự do và các lổ trống trong chất bán dẫn . Bằng sự phá vỡ các phân tử , bứt các electron thành dạng tự do di chuyển qua vùng cấu trúc mạng tinh thể tạo sự xuất hiện các lỗ trống . Làm cho tỉ lệ điện tử tự do và lổ trống tăng lên theo qui luật hàm mũ với nhiệt độ .
2.4.3 Một số IC đo nhiệt độ thông dụng
- ẠD590
Ngõ ra là dòng điện.
Độ nhạy 1A/0K.
Độ chính xác +40C.
Nguồn cung cấp Vcc = 4 – 30V.
Phạm vi sử dụng –55oc đến 150oc
- LX5700
Ngõ ra là điện áp.
Độ nhạy –10mv/0K.
Phạm vi sử dụng –550C – 1500C.
- LM135, LM335
Ngõ ra là điện áp.
Độ nhạy 10mv/0C.
Sai số cực đại 1,50C khi nhiệt độ lớn hơn 1000C.
Phạm vi sử dụng –550C – 1500C
2.5 Các chuẩn giao tiếp máy tính
2.5.1 Giao tiếp máy tính qua cổng song song (LPT)
Công ty Centronics đã thiết kế ra cổng song song nhằm mục đích nối máy tính PC với máy in. Về sau, cổng song song đã phát triển thành một tiêu chuẩn không chính thức. Tên gọi của cổng song song bắt nguồn từ kiểu truyền dữ liệu qua cổng này: các bit dữ liệu được truyền song song hay cụ thể là byte nối tiếp còn bit song song.
Cho đến nay cổng song song có mặt ở hầu hết các máy tính PC được sản xuất trong thời gian gần đây. cổng song song hay con được gọi là cổng máy in hay cổng Centronics. cấu trúc của cổng song song rất đơn giản với tám đường dẫn dữ liệu, một đường dẫn Mass chung. bốn đường dẫn điều khiển để chuyển các dữ liệu điều khiển đến máy in và năm đường dẫn trang thái để truyền các thông tin về trạng thái của máy in ngược trở lại máy tính. Giao diện song song sử dụng các mức logic TTL, vì vậy việc sử dụng trong mục đích đo lường và điều khiển có phần đơn giản.
Khoảng cách cực đại giữa cổng song song máy tính PC và thiết bị ngoại vi bị hạn chế vì điện dung ký sinh và hiện tượng cảm ứng giữa các đường dẫn có thể làm biến dạng tín hiệu. Khoảng cách giới hạn là 8 m, thông thường từ 1,5 – 2 m. Tốc độ truyền dữ liệu qua cổng song song phụ thuộc vào các linh kiện phần cứng được sử dụng. Trên lý thuyết tốc độ truyền đạt đến 1Mbit/ s, nhưng khoảng cách truyền bị hạn chế trong phạm vi 1 m. Việc tăng khoảng cách truyền dữ liệu qua cổng song song không chỉ làm tăng khả năng gây lỗi đối với dữ liệu được truyền mà còn làm tăng cả chi phí đường dẫn.
2.5.2 Giao tiếp máy tính qua cổng nối tiếp RS 232 (COM)
Cổng nối tiếp RS 232 là giao diện phổ biến rộng rãi nhất. Trong máy tính PC thường cung cấp hai cổng nối tiếp là COM1 và COM2. Giống như cổng máy in, cổng nối tiếp RS 232 cũng được sử dụng một cách rất thuận tiện cho mục đích đo lường và điều khiển.
Việc truyền dữ liệu qua cổng RS 232 được tiến hành theo cách nối tiếp, nghĩa là các bit dữ liệu được truyền đi nối tiếp nhau trên một đường dẫn. Trước hết loại truyền này có khả năng dùng cho những khoảng cách lớn hơn, bởi vì các khả năng gây nhiễu là nhỏ đáng kể hơn khi dùng một cổng song song.
Cổng nối tiếp RS 232 không phải là một hệ thống Bus, nó cho phép dễ dàng tạo ra liên kết dưới hình thức điểm với điểm giữa hai máy cần trao đổi thông tin với nhau. Một thành viên thứ ba không thể tham gia vào cuộc trao đổi thông tin này.
Việc truyền dữ liệu xảy ra ở trên hai đường dẫn. Qua chân cắm ra TxD (Transmit Data), máy tính gửi các dữ liệu của nó đến máy kia. Trong khi đó các dữ liệu mà máy tính nhận được lại được dẫn đến chân nối RxD (Receive Data). Các tín hiệu khác đóng vai trò như là những tín hiệu hỗ trợ khi trao đổi thông tin và vì thế không phải trong mọi ứng dụng đều dùng đến.
Mức tín hiệu trên chân RxD tùy thuộc vào đường dẫn TxD và thông thường nằm trong khoảng -12 V đến + 12 V. Các bit dữ liệu được gửi đảo ngược lại. Mức điện áp đối với mức High nằm giữa – 3 V và – 12 V và mức Low nằm giữa + 3 V và + 12 V.
Bằng tốc độ Baud (bit/ s) ta thiết lập tốc độ truyền dữ liệu. Các giá trị thông thường là 300, 600, 1.200, 2.400, 9.600, 19.200…115.200 baud.
2.5.3 Giao tiếp máy tính qua khe cắm mở rộng (Slot Card)
Bên trong máy tính, ngoài những khe cắm dùng cho Card vào/ ra, Card màn hình, Card âm thanh…vẫn còn những rãnh cắm mở rộng. Ta có thể thiết kế Card mở rộng để cắm vào các khe cắm mở rộng này.
Hiện nay thì các khe cắm mở rộng phổ biến đều theo chuẩn bus PCI (Peripheral Component Interconnection) do công ty Intel xây dựng. Bus PCI truyền dữ liệu bằng cách sử dụng đồng hồ hệ thống với ưu điểm là có thể hoạt động ở chế độ trên 32 bit thậm chí đến 64 bit. Tốc độ truyền dữ liệu rất cao: trong chế độ 64 bit ở tốc độ 33 Mhz thì tốc độ truyền dữ liệu cực đại bằng 264 Mbytes/s; 132 Mbytes/s trong chế độ 32 bit.
2.5.4 Giao tiếp máy tính qua cổng nối tiếp đa năng USB
Ở các máy tính đời mới nhất đều có trang bị hai cổng USB ở phía sau máy tính, ngoài ra còn có các card mở rộng để tạo ra các cổng USB trên các máy tính đã ra đời trước đó.
Bus USB là một bus nối tiếp. Dữ liệu truyền trên bus tương tự trong trường hợp cổng nối tiếp, cụ thể là theo từng bit kế tiếp nhau. Một điểm đáng lưu ý là dữ liệu được truyền trên cùng các đường dẫn theo hai hướng, trong khi theo chuẩn RS 232 dữ liệu được truyền trên những đường dẫn khác nhau, mỗi đường chỉ theo một hướng. Sự khác nhau cơ bản thể hiện ở chỗ các giao diện nối tiếp từ trước đến nay chỉ có thể sử dụng cho một thiết bị, nhưng bus USB lại cho phép đấu nối đến 127 thiết bị, cũng chính vì vậy được gọi là một bus. Một thiết bị đấu nối vào bus nhận được một địa chỉ và cũng chính qua địa chỉ này thiết bị có thể trao đổi dữ liệu với máy tính PC cũng như các thiết bị khác.
Về mặt tốc độ, việc trao đổi dữ liệu qua bus USB nhanh hơn qua cổng RS 232. Dữ liệu có thể được truyền với tốc độ đến 12 Mbps trên các đường dẫn tín hiệu, dải thông được phân chia cho tất cả các thiết bị được đấu nối với bus. Với bus USB 1.0, tốc độ truyền dữ liệu lên tới trên 12 Mbps, phiên bản USB 2.0 cho phép đạt tới tốc độ truyền dữ liệu trên 480 Mbps nhưng vẫn giữ tính tương thích với phiên bản USB 1.0. Bus USB còn có đặc tính nổi bật là “Plug and Play”, trong khi máy tính đang hoạt động, thiết bị có thể được đấu vào hoặc tháo ra mà không cần tắt điện nguồn nuôi cho máy tính.
2.6 Ngôn ngữ giao tiếp máy tính
2.6.1 Sơ lược về các ngôn ngữ lập trình
- Ngôn ngữ thế hệ thứ nhất
Là các ngôn ngữ lập trình theo mức mã máy. Chương trình mã máy và dạng tương đương của nó dễ đọc hơn cho con người – hợp ngữ – biểu thị cho thế hệ ngôn ngữ thứ nhất.
- Ngôn ngữ thế hệ thứ hai
Chúng được phát triển từ cuối những năm 1950 và đầu những năm 1960. Các ngôn ngữ thế hệ thứ hai được đặc trưng bởi việc sử dụng rộng rãi thư viện phần mềm khổng lồ. Tiêu biểu có các ngôn ngữ: Fortran, Cobol, Algol và Basic.
- Ngôn ngữ thế hệ thứ ba
Chúng còn được gọi là ngôn ngữ lập trình có cấu trúc, được đặc trưng bởi khả năng cấu trúc dữ liệu và thủ tục mạnh. Tiêu biểu có các ngôn ngữ: PL/1, Pascal, Modula-2, Ada, C, C++, Lisp, Prolog, APL, Forth …
- Ngôn ngữ thế hệ thứ tư
Trong toàn bộ lịch sử phát triển phần mềm, chúng ta đã có ý định phát sinh ra chương trình máy tính ở mức trừu tượng ngày càng cao. Các ngôn ngữ thế hệ thứ tư tổ hợp các đặc trưng thủ tục và phi thủ tục. Tức là, ngôn ngữ có khả năng cho phép người dùng xác định các điều kiện và hành động tương ứng (thành phần thủ tục) trong khi đồng thời cho phép người dùng chỉ ra kết quả mong muốn (thành phần phi thủ tục) rồi áp dụng tri thức chuyên lĩnh vực để điền các chi tiết thủ tục.
2.6.2 Chọn ngôn ngữ lập trình
Việc chọn ngôn ngữ lập trình cho một đề tài riêng phụ thuộc vào nhiều yếu tố như:
- Tính đồng đều hay tính nhất quán khi sử dụng các kí pháp của ngôn ngữ.
- Tính gọn gàng được biểu thị qua việc: hỗ trợ cho các kết cấu có cấu trúc, loại từ khóa và cách viết tắt có thể dùng được, số phép toán, số hàm có sẵn.
- Tính sẵn có của công cụ phát triển có thể làm ngắn bớt thời gian viết chương trình.
- Tính dễ bảo trì có tầm quan trọng chủ chốt cho tất cả các nỗ lực phát triển phần mềm.
Những người thực hiện đề tài chọn ngôn ngữ lập trình Delphi với một số lý do:
- Delphi có hạt nhân là trình biên dịch Pascal rất nổi tiếng và quen thuộc với tất cả lập trình viên. Trình biên dịch Delphi là sự tổng hợp tinh hoa về kinh nghiệm của Pascal hơn một thập kỷ qua, cộng với kỹ thuật biên dịch được tối ưu hóa dựa trên kiến trúc 32-bit của bộ vi xử lý
- Delphi cho phép người lập trình xây dựng ứng dụng bằng cách chọn các thành phần công cụ có sẵn từ bảng công cụ (Component Pallet) đặt chúng vào Form (cửa sổ chương trình), lắp ghép tạo một ứng dụng hoàn chỉnh. Mọi thành phần trong Delphi (kể cả ngôn ngữ) được xây dựng trên nền tảng hướng đối tượng vững chắc
- Điểm đặc biệt ở Delphi với các ngôn ngữ khác là khả năng biên dịch các chương trình thực thi (.EXE) độc lập 32 bit chạy rất nhanh và hiệu quả.
- Ngôn ngữ Delphi là ngôn ngữ quen thuộc đối với những người làm đề tài này.
2.7 Đường truyền RS-485
2.7.1 Giới thiệu
Khi hệ thống cần truyền một khối thông tin nhỏ ở khoảng cách xa, thông thường người ta chọn RS-485.
Mạng sử dụng chuẩn RS-485 rất đa dạng: ta có thể giao tiếp giữa PC với nhau, hoặc giữa PC với Vi Xử Lí , hoặc bất kỳ thiết bị nào truyền thông nối tiếp bất đồng bộ.
2.7.2 Đặc điểm của RS-485
- Giá thành thấp:
Các bộ điều khiển (Driver) và bộ nhận (Receiver) không đắt và chỉ yêu cầu cung cấp nguồn đơn +5V để tạo ra mức điện áp vi sai tối thiểu 1.5V ở ngỏ ra vi sai.
- Khả năng về mạng:
RS-485 là một giao diện đa điểm (multi-drop), nó có thể có nhiều Driver và Receiver, số Receiver có thể lên đến 256 nếu ngõ vào của các Receiver có trở kháng vào cao.
- Khả năng kết nối:
Ví dụ: khi tốc độ là 90Kbps thì khoảng cách là 1200m, 1Mbps thì khoảng cách là 120m, còn với tốc độ 10Mbps thì khoảng cách chỉ còn 15m.
2.7.3 Một số đặc tính RS-485
2.7.3.1 Đường truyền cân bằng và không cân bằng:
Sở dĩ RS-485 có thể truyền trên một khoảng cách lớn là do chúng sử dụng đường truyền cân bằng. Mỗi một tín hiệu sẽ truyền trên một cặp dây, với mức điện áp trên một dây là âm hoặc điện áp bù trên dây kia. Bộ thu sẽ đáp ứng phần hiệu giữa các mức điện áp, được minh hoạ ở hình dưới:
Hình 2.9 Đường truyền cân bằng
Hình 2.10 Đường truyền không cân bằng
Một thuận lợi lớn của RS-485 là khả năng chống nhiễu tốt. TIA/EIA – 485 chỉ định hai đường vi sai là A và B. Tại bộ điều khiển (Driver) nếu VA > VB thì mức logic ở đầu vào là cao, ngược lại VA < VB thì mức logic ở đầu vào là thấp. Tại bộ nhận (Receiver) nếu VA > VB thì mức logic ở đầu ra là cao và ngược lại.
Đối với các bộ nhận đầu vào phải nằm trong tầm –7V ÷ + 12 V. Mức áp vi sai đầu vào tối đa - 6V ≤ VA – VB ≤ +6V
2.7.3.2 Ưu điểm của đường truyền cân bằng
Đường truyền cân bằng có ưu điểm bởi hai đường tín hiệu mang dòng gần bằng nhau nhưng ngược dấu. Điều này giúp giảm nhiễu trên đuờng truyền bởi hầu hết các điện áp nhiễu điều tăng hay giảm đều nhau trên cả hai đường truyền. Bất kì một điện áp nhiễu nào tác động lên một dây điều bị triệt tiêu bởi điện áp bù trên dây kia. Đường nhiễu có thể là các dây khác trong cáp hoặc ở bên ngoài. Một bộ thu cân bằng chỉ nhận tín hiệu cần truyền, loại bỏ tín hiệu nhiễu hoặc giảm đi rất nhiều tín hiệu nhiễu.
Ngược lại, trong giao tiếp không cân bằng, bộ thu phát mức điện áp giữa dây tín hiệu và đất. Khi có nhiễu chúng sẽ tác động đến mạch, khi gặp mội trường có nhiễu lớn chúng sẽ gây sai lệch mức logic → mạch hoạt động sai. Một ưu điểm khác của đường truyền cân bằng là nó có thể triệt tiêu được phần điện áp tiềm tàng giữa bộ phát và bộ thu. Trong kết nối ở khoảng cách lớn, điện thế ở các bộ điều khiển và bộ thu có thể khác nhau nhiều vôn.
Ở một đường truyền không cân bằng, điện thế đất khác nhau có thể làm cho bộ thu không đọc được đầu vào. Còn ở đường truyền cân bằng thì chúng không quan tâm đến điện thế đất vì nó chỉ đọc phần điện thế hiệu giữa hai dây truyền tín hiệu.
2.7.4 Nguyên tắc hoạt động của RS-485
2.7.4.1 Mức áp yêu cầu:
Giao tiếp RS – 485 điển hình sử dụng nguồn cung cấp đơn +5V nhưng mức logic tại đầu phát và đầu thu không phải là mức TTL hay mức CMOS, để có mức ra thích hợp thì VA – VB ≥ 1.5V.
Điện áp giữa mỗi đầu ra và đất không xác định bằng việc trừ mà mode điện áp chung phải nằm trong tầm ±7V. Nếu như giao tiếp cân bằng một cách hoàn hảo thì các đầu ra offset bằng một nửa với nguồn cung cấp. Bất cứ sự cân bằng nào cũng làm tăng hay giảm mức offset.
Hình bên dưới chỉ áp ra A và B của một bộ điều khiển RS-485. Biên độ đầu ra gần 3V thay đổi từ +1 ÷ +4V hoặc –1V ÷ -4V so với đất. Nguồn cung cấp cho bộ điều khiển là +5V
Hình 2.11 Ngõ ra của bộ phát RS-485
Hình bên dưới chỉ mức điện áp vi sai giữa dây A và B ở đầu ra của bộ điều khiển. Biên độ đỉnh đỉnh của áp ra là 6V gấp hai lần biên độ đỉnh đỉnh của điện áp trên mỗi đường dây
Hình 2.12 Ngõ ra vi sai của bộ phát
Nếu như một đầu ra đóng mở trước một đầu ra khác thì điện áp đầu ra vi sai đóng mở chậm hơn và điều này giới hạn tốc độ truyền của mạng. Thời gian lệch (Skew) là khoảng thời gian đóng mở chênh lệch giữa 2 đầu ra. Các Driver của RS-485 được thiết kế sao cho tối thiểu thời gian lệch.
Tại bộ thu, điện áp 2 đầu vào A và B chỉ cần chênh lệch 200mV. Nếu VA -VB ≥ 0.2V thì đầu thu sẽ đọc là mức logic 1, ngược lại là mức logic 0. Nếu như điện áp vi sai này < 0,2V thì mức logic không xác định.
Sự khác nhau giữa điện áp bộ điều khiển và bộ thu là giới hạn nhiễu cho phép 1,3V. Điện áp vi sai có thể yếu đi hoặc bị nhiễu kí sinh khoảng 1,3 V thì đầu thu vẫn nhận được mức logic đúng.
Trong hầu hết các mạng, điện áp đầu ra bộ phát lớn hơn 1,5V. Do đó giới hạn nhiễu lớn hơn. Một bộ bộ điều khiển cần cấp nguồn 3V cũng có thể có áp ra vi sai giữa 2 đầu ra là 1,5 V
TIA/EIA – 485 định nghĩa : B > A → mức 1; A > B → mức 0 . Sử dụng định nghĩa này các chip giao tiếp RS-485 thì làm ngược lại.
RS-485 có thể truyền xa 1200m, tốc độ lên đến 10Mbps. Nhưng 2 thông số này không xảy ra cùng lúc. Khi khoảng cách truyền tăng thì tốc độ baud giảm xuống.
2.7.4.2 Dòng yêu cầu
Dòng tổng trong RS-485 thay đổi theo trở kháng vào của thành phần trong mạng gồm: các bộ phát, các đầu thu, cáp và các thành phần đầu cuối.
Trở kháng ra của bộ phát thấp và trở kháng của cáp thấp cho phép việc đóng mở được nhanh hơn và bảo đảm bộ thu sẽ nhận được tín hiệu với tốc độ cao nhất có thể. Nếu trở kháng của đầu thu cao thì nó sẽ làm giảm dòng trong mạng và kéo dài tuổi thọ của bộ nguồn.
Việc sử dụng thành phần đầu cuối sẽ có lợi đối với dòng trong mạng. Khi không có các thành phần đầu cuối thì trở kháng vào của các bộ thu sẽ ảnh hưởng lớn đối với điện trở tổng nối tiếp. Tổng trở kháng vào thay đổi theo các bộ thu và trở kháng vào của chúng.
Một bộ phát RS-485 có thể lái đến 32 đơn vị tải. TIA/EIA – 485 xác định một đơn vị tải dưới dạng dòng yêu cầu. Một bộ thu tương đương một đơn vị tải, mà tải này không kéo nhiều hơn một lượng dòng xác định tại đầu vào và điện áp được xác định theo tiêu chuẩn. Khi áp tại đầu thu là 12V thì một đơn vị tải – Bộ thu sẽ không kéo nhiều hơn 1mA. Để đạt được yêu cầu này thì một bộ thu phải có một điện trở đầu vào ít nhất là 12 K, mắc giữa mỗi đầu vi sai với Vcc hay GND tùy thuộc vào chiều dòng điện. Nếu thêm một bộ thu thì điện trở tương là 6000 Ω. Nếu có 32 đơn vị tải thì R tương đương là 375Ω.
2.7.5 Kết nối mạng với chuẩn RS-485
2.7.5.1 Song công ( Full-Duplex )
RS-485 được thiết kế để dùng cho hệ thống nhiều node ( multi-drop). Hầu hết mạng RS-485 là bán song công sử dụng nhiều bộ phát và bộ thu, cùng chia sẽ một đường truyền tín hiệu. Nhưng chúng ta cũng có thể sử dụng RS-485 ở dạng song công, ở đó mỗi hướng sẽ có đường truyền tín hiệu riêng của nó. Việc chuyển đổi mạng RS-232 sang RS-485 song công dễ dàng thực hiện bằng phần mềm.
Với mạng loại này ta có thể sử dụng SN75179B ở hai đầu bộ phát và bộ thu. Mạng này gồm 1 bộ phát dùng chuyển đổi 5V TTL sang RS-485 và một bộ thu dùng chuyển RS-485 sang 5V TTL
Đây là một giải pháp đơn giản khi ta muốn tạo một mạng song công, khoảng cách xa giữa các vi điều khiển. Các chip giao tiếp RS-485 nhỏ hơn, đơn giản và rẻ hơn trong việc chuyển đổi sang RS-232
Hình 2.13 Kết nối song công nhiều điểm
Trong một mạng gồm có chủ và tớ, ở đó node chủ dùng để điều khiển mạng và cho phép việc thu phát của thành phần khác. Một cặp dây dùng để nối bộ phát của con chủ với bộ thu của các con tớ, còn một cặp dây khác nối bộ phát của các con tớ với bộ thu của con chủ
Tất cả các con tớ phải được thông tin từ con chủ để biết con nào được cho phép. Việc định địa chỉ của con tớ được xác định bằng cặp dây đối lặp. Thuận lợi của phương pháp này là tiết kiệm thời gian cho các con tớ bởi vì chúng không đọc thông tin trả lời của các con tớ khác. Nếu tất cả các node cùng chia sẽ một đường dữ liệu thì các con tớ phải đọc tất cả mọi thông tin lưu thông trên đường mạng để lấy thông tin từ con chủ gởi tới.
2.7.5.2 Bán song công
Rất nhiều mạng dùng kết nối 485 là bán song công với nhiều bộ phát và thu cùng chia sẽ một đường tín hiệu.
Khi một mạng có 3 hay nhiều node thì tại một thời điểm chỉ có một node được thu hay phát. Việc sử dụng 2 đường truyền tín hiệu là thuận lợi khi chỉ có 2 thiết bị (một chủ, một tớ) vì mỗi node có thể thu phát bất kì lúc nào mà không sợ có sự xung đột. Nhưng nếu có nhiều hơn một bộ phát trên cùng một cặp dây thì không có sự đảm bảo rằng đường truyền tín hiệu là “rỗng” (free) khi bộ phát cần truyền.
Chip 75176B bao gồm một bộ phát dùng đổi mức logic TTL sang RS-485 và một bộ thu dùng chuyển RS-485 sang mức TTL và ở mỗi chip đều có một đầu vào cho phép. Không giống như SN75179B chip này chỉ có một cặp chân RS-485 và chân cho phép vào, dùng xác định liệu bộ phát hay bộ thu là tích cực
Khi đầu vào cho phép của bộ phát ở mức thấp thì ngõ ra của bộ phát ở trạng thái tổng trở cao. Khi đầu vào cho phép của bộ thu ở mức cao thì đầu ra của bộ thu ở trạng thái tổng trở cao.
Chương 3
Giới thiệu linh kiện sử dụng
3.1 Vi điểu khiển 89s52
3.1.1 Đặc điểm
IC 89s52 là một họ IC vi điều khiển do hãng Intel của Mỹ sản xuất. Chúng có các đặc điểm chung như sau:
- 4 KB EPROM bên trong.
- 128 Byte RAM nội.
- 4 Port xuất /nhập I/O 8 bit.
- Giao tiếp nối tiếp.
- 64 KB vùng nhớ mã ngoài.
- 64 KB vùng nhớ dữ liệu ngoại.
- Xử lý Boolean (hoạt động trên bit đơn).
- 210 vị trí nhớ có thể định vị bit.
- 4µ cho hoạt động nhân hoặc chia.
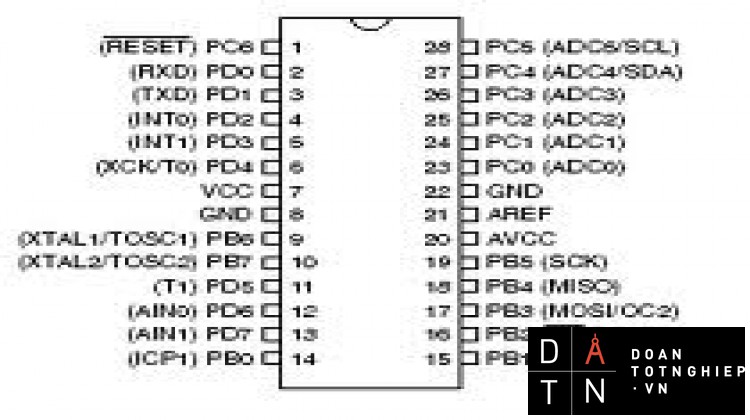
3.1.2 Sơ đồ chân 89s52
Hình 3.1 Sơ đồ chân của 89s52
3.1.3 Chức năng các chân
3.1.3.1 Chức năng của các Port
Chức năng các chân của 89s52 có tất cả 40 chân có chức năng như các đường xuất nhập. Trong đó có 24 chân có tác dụng kép (có nghĩa là 1 chân có 2 chức năng), mỗi đường có thể hoạt động như đường xuất nhập hoặc như đường điều khiển hoặc là thành phần của các bus dữ liệu và bus địa chỉ. a.Các Port
-Port 0
Port 0 là port có 2 chức năng ở các chân 32 - 39 của 89s52. Trong các thiết kế cỡ nhỏ không dùng bộ nhớ mở rộng nó có chức năng như các đường I/O. Đối với các thiết kế cỡ lớn có bộ nhớ mở rộng, nó được kết hợp giữa bus địa chỉ và bus dữ liệu.
-Port 1
Port 1 là port I/O trên các chân 1-8. Các chân được ký hiệu P1.0, P1.1, P1.2, ... P1.7 có thể dùng cho giao tiếp với các thiết bị ngoài nếu cần. Port 1 không có chức năng khác, vì vậy chúng chỉ được dùng cho giao tiếp với các thiết bị bên ngoài.
-Port 2
Port 2 là 1 port có tác dụng kép trên các chân 21- 28 được dùng như các đường xuất nhập hoặc là byte cao của bus địa chỉ đối với các thiết bị dùng bộ nhớ mở rộng.
-Port 3
Port 3 là port có tác dụng kép trên các chân 10-17. Các chân của port này có nhiều chức năng, các công dụng chuyển đổi có liên hệ với các đặc tính đặc biệt của 89s52 như ở bảng sau:
|
Bit |
Tên |
Chức năng chuyển đổi |
|
P3.0 |
RXT |
Ngõ vào dữ liệu nối tiếp. |
|
P3.1 |
TXD |
Ngõ xuất dữ liệu nối tiếp. |
|
P3.2 |
INT0\ |
Ngõ vào ngắt cứng thứ 0 |
|
P3.3 |
INT1\ |
Ngõ vào ngắt cứng thứ 1 |
|
P3.4 |
T0 |
Ngõ vào củaTIMER/COUNTER thứ 0. |
|
P3.5 |
T1 |
Ngõ vào củaTIMER/COUNTER thứ 1. |
|
P3.6 |
WR\ |
Tín hiệu ghi dữ liệu lên bộ nhớ ngoài |
|
P3.7 |
RD\ |
Tín hiệu đọc bộ nhớ dữ liệu ngoài. |
Bảng 3.1 Chức năng các chân của Port 3
3.1.3.2 Các ngõ tín hiệu điều khiển
- Ngõ tín hiệu PSEN (Program store enable)
PSEN là tín hiệu ngõ ra ở chân 29 có tác dụng cho phép đọc bộ nhớ chương trình mở rộng thường được nối đến chân OE\ (output enable) của Eprom cho phép đọc các byte mã lệnh. PSEN ở mức thấp trong thời gian Microcontroller 89s52 lấy lệnh. Các mã lệnh của chương trình được đọc từ Eprom qua bus dữ liệu và được chốt vào thanh ghi lệnh bên trong 89s52 để giải mã lệnh. Khi 89s52 thi hành chương trình trong EPROM nội PSEN sẽ ở mức logic 1.
- Ngõ tín hiệu điều khiển ALE (Address Latch Enable)
Khi 89s52 truy xuất bộ nhớ bên ngoài, port 0 có chức năng là bus địa chỉ và bus dữ liệu do đó phải tách các đường dữ liệu và địa chỉ. Tín hiệu ra ALE ở chân thứ 30 dùng làm tín hiệu điều khiển để giải đa hợp các đường địa chỉ và dữ liệu khi kết nối chúng với IC chốt. Tín hiệu ra ở chân ALE là một xung trong khoảng thời gian port 0 đóng vai trò là địa chỉ thấp nên chốt địa chỉ hoàn toàn tự động. Các xung tín hiệu ALE có tốc độ bằng 1/6 lần tần số dao động trên chip và có thể được dùng làm tín hiệu clock cho các phần khác của hệ thống. Chân ALE được dùng làm ngõ vào xung lập trình cho EPROM trong 89s52.
- Ngõ tín hiệu EA\(External Access)
Tín hiệu vào EA\ ở chân 31 thường được mắc lên mức 1 hoặc mức 0. Nếu ở mức 1, 89s52 thi hành chương trình từ EPROM nội trong khoảng địa chỉ thấp 4 Kbyte. Nếu ở mức 0, 89s52 sẽ thi hành chương trình từ bộ nhớ mở rộng. Chân EA\ được lấy làm chân cấp nguồn 12V khi lập trình cho Eprom trong 89s52.
- Ngõ tín hiệu RST (Reset)
Ngõ vào RST ở chân 9 là ngõ vào Reset của 89s52. Khi ngõ vào tín hiệu này đưa lên cao ít nhất là 2 chu kỳ máy, các thanh ghi bên trong được nạp những giá trị thích hợp để khởi động hệ thống. Khi cấp điện mạch tự động Reset.
- Các ngõ vào bộ dao động X1, X2
Bộ dao động được được tích hợp bên trong 89s52, khi sử dụng 89s52 người thiết kế chỉ cần kết nối thêm thạch anh và các tụ. Tần số thạch anh thường sử dụng cho 89s52 là 12Mhz. Chân 40 (Vcc) được nối lên nguồn 5V.
3.1.4 Cấu trúc bên trong
3.1.4.1 Tổ chức bộ nhớ
Hình 3.2 Tổ chức bộ nhớ của 89s52
Bộ nhớ trong 89s52 bao gồm EPROM và RAM. RAM trong 89s52 bao gồm nhiều thành phần: phần lưu trữ đa dụng, phần lưu trữ địa chỉ hóa từng bit, các bank thanh ghi và các thanh ghi chức năng đặc biệt.
89s52 có bộ nhớ theo cấu trúc Harvard: có những vùng bộ nhớ riêng biệt cho chương trình và dữ liệu. Chương trình và dữ liệu có thể chứa bên trong 89s52 nhưng 89s52 vẫn có thể kết nối với 64K byte bộ nhớ chương trình và 64K byte dữ liệu.
Hai đặc tính cần chú ý là:
- Các thanh ghi và các port xuất nhập đã được định vị (xác định) trong bộ nhớ và có thể truy xuất trực tiếp giống như các địa chỉ bộ nhớ khác.
- Ngăn xếp bên trong Ram nội nhỏ hơn so với Ram ngoại như trong các bộ Microcontroller khác.
RAM bên trong 89s52 được phân chia như sau:
- Các bank thanh ghi có địa chỉ từ 00H đến 1FH.
- RAM địa chỉ hóa từng bit có địa chỉ từ 20H đến 2FH.
- RAM đa dụng từ 30H đến 7FH.
- Các thanh ghi chức năng đặc biệt từ 80H đến FFH.
3.1.4.2 Ram đa dụng:
Mọi địa chỉ trong vùng ram đa dụng đều có thể được truy xuất tự do dùng kiểu địa chỉ trực tiếp hay gián tiếp. Ví dụ để đọc nội dung ô nhớ ở địa chỉ 5FH của ram nội vào thanh ghi tích lũy A : MOV A,5FH.
Hoặc truy xuất dùng cách địa chỉ gián tiếp qua R0 hay R1. Ví dụ 2 lệnh sau sẽ thi hành cùng nhiệm vụ như lệnh ở trên:
MOV R0, #5FH
MOV A , @R0
3.1.4.3 Ram có thể truy xuất từng bit:
89s52 chứa 210 bit được địa chỉ hóa từng bit, trong đó 128 bit chứa ở các byte có địa chỉ từ 20H đến 2FH, các bit còn lại chứa trong nhóm thanh ghi chức năng đặc biệt.
Ý tưởng truy xuất từng bit bằng phần mềm là một đặc tính mạnh của vi điều khiển nói chung. Các bit có thể được đặt, xóa, and, or,… với 1 lệnh đơn. Ngoài ra các port cũng có thể truy xuất được từng bít làm đơn giản phần mềm xuất nhập từng bit.
Ví dụ để đặt bit 67H ta dùng lệnh sau: SETB 67H.
3.1.4.4 Các bank thanh ghi
Bộ lệnh 89s52 hỗ trợ 8 thanh ghi có tên là R0 đến R7 và theo mặc định (sau khi reset hệ thống), các thanh ghi nàyở các địa chỉ 00H đến 07H. lệnh sau đây sẽ đọc nội dung ở địa chỉ 05H vào thanh ghi tích lũy: MOV A, R5.
Đây là lệnh 1 byte dùng địa chỉ thanh ghi. Tuy nhiên có thể thi hành bằng lệnh 2 byte dùng địa chỉ trực tiếp nằm trong byte thứ 2: MOV A, 05H.
Lệnh dùng các thanh ghi R0 đến R7 thì sẽ ngắn hơn và nhanh hơn nhiều so với lệnh tương ứng dùng địa chỉ trực tiếp.
Bank thanh ghi tích cực bằng cách thay đổi các bit trong từ trạng thái chương trình (PSW). Giả sủ thanh ghi thứ 3 đang được truy xuất, lệnh sau đây sẽ di chuyển nội dung của thanh ghi A vào ô nhớ ram có địa chỉ 18H: MOV R0, A.
3.1.4.5 Các thanh ghi có chức năng đặc biệt:
89s52 có 21 thanh ghi chức năng đặc biệt (SFR: Special Funtion Register) ở vùng trên của RAM nội từ địa chỉ 80H đến FFH.
Chú ý: tất cả 128 địa chỉ từ 80H đến FFH không được định nghĩa, chỉ có 21 thanh ghi chức năng đặc biệt được định nghĩa sẵn các địa chỉ.
-Thanh ghi trạng thái chương trình:
Thanh ghi trạng thái chương trình PSW (Program Status Word ) ở địa chỉ DOH chứa các bít trạng thái như bảng sau:
|
Bit |
Ký hiệu |
Địa chỉ |
Ý nghĩa |
|
PSW.7 PSW.6 PSW.5 PSW.4 PSW.3
PSW.2 PSW.1 PSW.0 |
CY AC F0 RS1 RS0
0V _ P |
D7H D6H D5H D4H D3H
D2H D1H D0H |
Cờ nhớ Cờ nhớ phụ Cờ 0 Bit 1 chọn bank thanh ghi Bit 0 chọn bank thanh ghi 00=bank 0: ô nhớ 00H – 07H 01=bank 1: ô nhớ 08H – 0FH 10=bank 2: ô nhớ 10H – 1FH 11=bank 3: ô nhớ18H –1FH Cờ tràn Dự trữ Cờ Parity chẵn lẻ.
|
Bảng 3.2 Chức năng bit của thanh ghi trạng thái
- Cờ nhớ:
C = 1 nếu phép toán cộng có tràn hoặc phép toán trừ có mượn và ngược lại C = 0. Ví dụ nếu thanh ghi A có giá trị FF thì lệnh sau:
ADD A, #1
Phép cộng này có tràn nên bit C = 1 và kết quả trong thanh ghi A = 00H
Cờ nhớ có thể xem là thanh ghi 1 bit cho các lệnh luận lý thi hành trên bit.
ANL C, 25H
-Cớ nhớ phụ
Khi cộng các số BCD, cờ nhớ phụ AC = 1 nếu kết quả 4 bit thấp trong khoảng 0AH đến 0FH. Ngược lại AC = 0.
- Cờ 0
Cờ 0 là một bit cờ đa dụng dành cho các ứng dụng của người dùng.
- Các bit chọn bankthanh ghi truy xuất:
Các bit chọn bank thanh ghi (RS0 và RS1) xác định bank thanh ghi được truy xuất. Chúng được xóa sau khi reset hệ thống và được thay đổi bằng phần mềm nếu cần. Ví dụ lệnh sau cho phép bank thanh ghi 3 và di chuyển nội dung của bank thanh ghi R7 (địa chỉ bye 1FH) vào thanh ghi A:
SETB RS1
SETB RS0
MOV A,R7
-Thanh ghi B
Thanh ghi B ở địa chỉ F0H được dùng cùng với thanh ghi tích lũy A cho các phép toán nhân và chia. Lệnh MUL AB sẽ nhân các giá trị không dấu 8 bit trong A và B rồi trả kết quả về 16 bit trong A (byte thấp) và B (byte cao). Lệnh DIV AB sẽ chia A cho B rồi trả kết quả nguyên trong A và phần dư trong B. thanh ghi cũng có thể xem như thanh ghi đệm đa dụng.
- Con trỏ ngăn xếp
Con trỏ ngăn xếp SP là một thanh ghi 8 bit ở địa chỉ 18H. Nó chứa địa chỉ của byte dữ liệu hiện hành trên đỉnh của ngăn xếp. Các lệnh trên ngăn xếp bao gồm các lệnh cất dữ liệu vào ngăn xếp và lấy dữ liệu ra khỏi ngăn xếp. Lệnh cất dữ liệu vào ngăn xếp sẽ làm tăng SP trước khi ghi dữ liệu và lệnh lấy dữ liệu ra khỏi ngăn xếp sẽ làm giảm SP. Ngăn xếp của 89s52 được giữ trong ram nội và giới hạn các địa chỉ có thế truy xuất bằng địa chỉ gián tiếp, chúng là 128 byte đầu của 89s52
Để khởi động SP với ngăn xếp bắt đầu tại địa chỉ 60 H, các lệnh sau đây được dùng:
MOV SP,#5FH
Khi reset 89s52, SP sẽ mang giá trị mặc định là 07H và dữ liệu đầu tiên sẽ được cất vào ô nhớ ngăn xếp có địa chỉ là 08 H. Ngăn xếp được truy xuất trực tiếp bằng các lệnh PUSH và POP để lưu trữ tạm thời và lấy lại dữ liệu hoặc truy xuất ngầm bằng lệnh gọi chương trình con ACALL,LCALL và các lệnh trở về (RET. RETI) để lưu trữ giá trị của bộ đếm chương trình khi bắt đầu thực hiện chương trình con và lấy lại khi kết thúc chương trình con.
-Con trỏ dữ liệu
Con trỏ dữ liệu DPTR được dùng để truy xuất bộ nhớ ngoài là một thanh ghi 16 bit ở địa chỉ 82H (DPL: byte thấp) và 83H (DPH: byte cao). 3 lệnh sau sẽ ghi 55H vào ram ngoài ở địa chỉ 1000H:
MOV A,#55H
MOV DPTR, #1000H
MOVX @DPTR,A
- Các thanh ghi port xuất nhập
Các port của 89s52 bao gồm port 0 ở địa chỉ 80H, port 1 ở địa chỉ 90H, port 2 ở địa chỉ A0H, và port3 ở địa chỉ B0H. tất cả các port này đều có thể truy xuất từng bit nên rất thuận tiện trong khả năng giao tiếp.
- Các thanh ghi timer
89s52 có chứa 2 bộ định thời/ đếm 16 bit được dùng cho việc định thời hoặc đếm sự kiện. Timer 0 ở địa chỉ 8AH (TL0: byte thấp) và 8CH (TH0: byte cao). Timer 1 ở địa chỉ 8BH (TL1: byte thấp) và 8DH (TH1: byte cao). Việc khởi động timer được Set bởi Timer Mode (TMOD) ở địa chỉ 89H và thanh ghi điều khiển timer (TCON) ở địa chỉ 88H, chỉ có TCON được địa chỉ hóa từng bit.
- Các thanh ghi port nối tiếp
89s52 chứa một port nối tiếp dành cho việc trao đổi thông tin với các thiết bị nối tiếp như máy tính, modem hoặc giao tiếp nối tiếp với các IC khác. Một thanh ghi gọi là bộ đệm dữ liệu nối tiếp (SBUF) ở địa chỉ 99H sẽ giữ cả 2 dữ liệu truyền và dữ liệu nhận. Khi truyền dữ liệu thì ghi lên SBUF, khi nhận dữ liệu thì đọc SBUF. Các mode vận hành khác nhau được lập trình qua thanh ghi điều khiển port nối tiếp SCON ở địa chỉ 98H.
- Các thanh ghi ngắt:
89s52 có cấu trúc 5 nguồn ngắt, 2 mức ưu tiên. Các ngắt bị cấm sau khi reset hệ thống và sẽ được cho phép bằng việc ghi thanh ghi cho phép ngắt (IE) ở địa chỉ A8H, cả 2 thanh ghi được địa chỉ hóa từng bit.
- Thanh ghi điều khiển công suất
Thanh ghi điều khiển công suất (PCON) ở địa chỉ 87H chứa các bit điều khiển.
- Tín hiệu Reset
89s52 có ngõ vào reset RST tác động ở mức cao trong khoảng thời gian 2 chu kỳ, sau đó xuống mức thấp để 89s52 bắt đầu làm việc. RST có thể kích bằng tay bằng một phím nhấn thường mở, sau khi reset hệ thống được tóm tắt như sau:
|
Thanh ghi |
Nội dung |
|
Đếm chương trình PC Thanhghi tích lũy A Thanh ghi B Thanh ghi trạng thái SP DPTR Port 0 đến Port 3 IP IE Các thanh ghi định thời
|
0000H 00H 00H 00H 07H 0000H FFH XXX0000 B 0XX00000 B 00H
|
Bảng 3.3 Trạng thái các thanh ghi sau khi Reset
Thanh ghi quan trọng nhất là thanh ghi bộ đếm chương trình PC được Reset tại địa chỉ 0000H. Khi ngõ vào RST xuống mức thấp, chương trình luôn bắt đầu tại địa chỉ 0000H của bộ nhớ chương trình. Nội dung của Ram trong chip không bị hay đổi bởi tác động của ngõ vào Reset.
3.1.4.6 Hoạt động TIMER
89s52 có hai timer 16 bit, mỗi timer có bốn cách làm việc. Người ta sử dụng các timer để:
- Định khoảng thời gian.
- Đếm sự kiện.
- Tạo tốc độ baud cho port nối tiếp trong 89s52.
Trong các ứng dụng định khoảng thời gian, người ta lập trình timer ở những khoảng đều đặn và đặt cờ tràn timer. Cờ được dùng để đồng bộ hóa chương trình để thực hiện một tác động như kiểm tra trạng thái của các ngõ vào hoặc gửi sự kiện ra các ngõra. Các ứng dụng khác có thể sử dụng việc tạo xung nhịp đều đặn của timer để đo thời gian trôi qua giữa hai sự kiện (ví dụ đo độ rộng xung ).
Truy xuất các timer của 89s52 dùng sáu thanh ghi chức năng đặc biệt cho trong bảng sau:
|
Tên |
Mục Đích |
Địa chỉ |
Địa chỉ hóa từng bit |
|
TCON |
Điều khiển Timer |
88H |
Có |
|
TMOD |
Chế độ Timer |
89H |
Không |
|
TL0 |
Byte thấp của Timer 0 |
90H |
Không |
|
TL1 |
Byte thấp của Timer 1 |
91H |
Không |
|
TH0 |
Byte cao của Timer 0 |
92H |
Không |
|
TH1 |
Byte cao của Timer 1 |
93H |
Không |
Bảng 3.4 Chức năng 6 thanh ghi đặc biệt
- Thanh ghi chế độ timer (TMOD)
Thanh ghi TMOD chứa hai nhóm 4 bit dùng để đặt chế độ làm việc cho Timer 0, và Timer 1.
|
Bit |
Tên |
Timer |
Mô tả |
|
7 |
GATE |
1 |
Bit mở cổng, khi lên 1 timer chỉ chạy khi INT1 ở mức cao |
|
6 |
C/T |
1 |
Bit chọn chế độ Count/Timer 1 = bộ đếm sự kiện 0 = bộ định khoảng thời gian |
|
5 |
M1 |
1 |
Bit 1 của chế độ mode |
|
4 |
M0 |
1 |
Bit 0 của chế độ mode |
|
3 |
GATE |
0 |
Bit mở cổng, khi lên 1 timer chỉ chạy khi INT0 ở mức cao |
|
2 |
C/T |
0 |
Bit chọn chế độ Count/Timer |
|
1 |
M1 |
0 |
Bit 1 của chế độ mode |
|
0 |
M0 |
0 |
Bit 0 của chế độ mode |
Bảng 3.5 Chức năng bit của thanh ghi TMOD
- Thanh ghi điều khiển timer(TCON)
Thanh ghi TCON chứa các bit trạng thái và các bit điều khiển cho Timer 1, Timer 0.
|
Bit |
Ký hiệu |
Địa chỉ |
Mô tả |
|
TCON.7 |
TF1 |
8FH |
Cờ báo tràn timer 1. Đặt bởi phần cứng khi tràn, được xóa bởi phần mềm, hoặc phần cứng khi bộ xử lý chỉ đến chương trình phục vụ ngắt. |
|
TCON.6 |
TR1 |
8EH |
Bit điều khiển timer 1 chạy đặt xóa bằng phần mềm để cho timer chạy ngưng. |
|
TCON.5 |
TF0 |
8DH |
Cờ báo tràn Timer 0. |
|
TCON.4 |
TR0 |
8CH |
Bit điều khiển Timer 0 chạy |
|
TCON.3 |
IE1 |
8BH |
Cờ cạnh ngắt 1 bên ngoài. Đặt bởi phần cứng khi phát hiện một cạnh xuống ở INT1 xóa bằng phần mềm họăc phần cứng khi CPU chỉ đến chương trình phục vụ ngắt.
|
|
TCON.2 |
IT1 |
8AH |
Cờ kiểu ngắt 1 bên ngoài. Đặt xóa bằng phần mềm để ngắt ngoài tích cực cạnh xuống /mức thấp. |
|
TCON.1 |
IE0 |
89H |
Cờ cạnh ngắt 0 bên ngòai |
|
TCON.0 |
IT0 |
88h |
Cờ kiểu ngắt 0 bên ngoài |
Bảng 3.6 Chức năng bit của thanh ghi TCON
- Khởi động và truy xuất thanh ghi timer:
Thông thường các thanh ghi được khởi động một lần đầu ở chương trình để đặt ở chế độ làm việc đúng. Sau đó, trong thân chương trình, các thanh ghi timer được cho chạy, dừng, các bit được kiểm tra và xóa, các thanh ghi timer được đọc và cập nhật…. theo đòi hỏi các ứng dụng.
TMOD là thanh ghi thứ nhất được khởi động vì nó đặt chế độ hoạt động. Ví dụ, các lệnh sau khởi động Timer 1 như timer 16 bit (chế độ 1) có xung nhịp từ bộ dao động tên chip cho việc định khoảng thời gian:
MOV TMOD, #1B
Lệnh này sẽ đặt M1 = 1 và M0 = 0 cho chế độ 1, C/ T= 0 và GATE = 0 cho xung nhịp nội và xóa các bit chế độ Timer 0. Dĩ nhiên, timer không thật sự bắt đầu định thời cho đến khi bit điều khiển chạy TR1 được đặt lên 1.
Nếu cần số đếm ban đầu, các thanh ghi TL1/TH1 cũng phải được khởi động. Một khoảng 100ms có thể được khởi động bằng cách khởi động giá trị cho TH1/TL1 là FF9CH:
MOV TL1, #9CH
MOV TH1, #0FFH
Rồi timer được cho chạy bằng cách đặt bit điều khiển chạy như sau:
SETB TR1
Cờ báo tràn được tự động đặt lên 1 sau 100ms. Phần mềm có thể đợi trong 100 ms bằng cách dùng lệnh rẽ nhánh có điều kiện nhảy đến chính nó trong khi cờ báo tràn chưa được đặt lên 1:
WAIT: JNB TF1, WAIT
Khi timer tràn, cần dừng timer và xóa cờ báo tràn trong phần mềm:
CLR TR1
CLR TF1
3.1.4.7 Ngắt ( INTERRUPT)
Một ngắt là sự xảy ra một điều kiện, một sự kiện mà nó gây ra treo tạm thời thời chương trình chính trong khi điều kiện đó được phục vụ bởi một chương trình khác.
Các ngắt đóng một vai trò quan trọng trong thiết kế và cài đặt các ứng dụng vi điều khiển. Chúng cho phép hệ thống đáp ứng bất đồng bộ với một sự kiện và giải quyết sự kiện đó trong khi một chương trình khác đang thực thi.
- Tổ chức ngắt của 89s52
Có 5 nguồn ngắt ở 89s52: 2 ngắt ngoài, 2 ngắt từ timer và 1 ngắt port nối tiếp. Tất cả các ngắt theo mặc nhiên đều bị cấm sau khi reset hệ thống và được cho phép từng cái một bằng phần mềm.
Khi có hai hoặc nhiều ngắt đồng thời, hoặc một ngắt xảy ra khi một ngắt khác đang được phục vụ, có cả hai sự tuần tự hỏi vòng và sơ đồ ưu tiên hai mức dùng để xác định việc thực hiện các ngắt. Việc hỏi vòng tuần tự thì cố định nhưng ưu tiên ngắt thì có thể lập trình được.
- Cho phép và cấm ngắt
Mỗi nguồn ngắt được cho phép hoặc cấm ngắt qua một thanh ghi chức năng đặt biệt có định địa chỉ bit IE ( Interrupt Enable : cho phép ngắt ) ở địa chỉ A8H.
...........................................
Hình 4.11 Sơ đồ nguyên lý Module Slav
4.2 Thiết kế phần mềm
4.2.1 Xây dựng chương trình cho vi điều khiển
4.2.1.1 Lưu đồ chương trình của Module Master
Với các yêu cầu thiết kế đã được nêu ở phần trên. Module Master sẽ nhận giá trị nhiệt độ và trạng thái tải từ các Module Slave theo thời gian tuần tự. Sau đó các giá trị này sẽ gửi lên cho máy tính khi được yêu cầu. Ngắt nối tiếp có vai trò quan trọng trong yêu cầu hoạt động của hệ thống này.
- Lưu đồ chương trình chính của Module
Hình 4.12 Lưu đồ chương trình chính Module Maste
- Lưu đồ chương trình ngắt nhận dữ liệu
Hình 4.13 Lưu đồ chương trình ngắt nhận dữ liệu của Module Maste
4.2.1.2 Lưu đồ chương trình của Module Slave
- Lưu đồ chương trình chính
Hình 4.14 Lưu đồ chương trình chính của Module Slave
- Lưu đồ điều khiển tả
Hình 4.15 Lưu đồ điều khiển tải của Module Slave
4.2.2 Xây dựng phần mềm cho máy tính
Phần mềm máy tính hoạt động một cách chủ động khi được mở.
Máy tính gửi byte điều khiển ‘fa’cho Module Master sau đó nhận giá trị nhiệt độ hiện thời của các Module slave cũng như trạng thái tải để hiển thị.
Máy tính gửi byte ‘fb’ cho Module Master cùng với các byte cài đặt về nhiệt độ và thời gian.
Giao diện cho phép người dung quan sát được nhiệt độ từng máy ấp, cài đặt được nhiệt độ và thời gian cho nhiệt độ đó.
Chương 5
Kết luận
5.1 Tóm tắt đề tài
Sau thời gian tiến hành nghiên cứu, thiết kế và thí nghiệm. Nhóm sinh viên đã tiến hành thi công các Module trong hệ thống điều khiển máy ấp trứng có giao tiếp với máy tính.
Các đặc điểm của hệ thống này:
Hai Module điều khiển máy ấp trứng.
Một module trung gian cho việc truyền dữ liệu và điều khiển chung.
Hệ thống giao tiếp dung đường truyền RS-485.
Giao tiếp với máy tính qua cổng COM.
Các tiện ích của phần mềm trên máy tính:
Hiển thị nhiệt độ hiện thời của 2 máy ấp trứng.
Hiển thị trạng thái các tải.
Cài đặt nhiệt độ và chu trình hoạt động cho 2 máy ấp trứng.
5.2 Hướng phát triển đề tài
Đề tài còn nhiều yếu tố chưa giải quyết triệt để:
Hệ thống dữ nhiệt có sai số tới 1oC.
Chưa có hệ thống thu thập và khống chế về độ ẩm của các máy ấp trứng. Trên thực tế, một máy ấp trứng hoàn chỉnh phải có hệ thống này.
Đề tài chỉ dừng ở việc dùng tải giả định là led. Chưa có thử nghiệm về khả năng hoạt động giữ nhiệt nếu dùng ở máy ấp thật, cũng như chưa nêu ra được nguyên lý hoạt động của giàn đảo trứng dùng động cơ như thế nào.
Chưa thiết kế phần cứng, cũng như phần mềm để chống xung đột đường truyền.
Phần mềm còn đơn giản, chưa thật đẹp. Thiếu phần vẽ biểu đồ nhiệt độ.
5.3 Kết luận
Trong quá trình thực hiện đề tài mặc dù gặp nhiều khó khăn: hạn chế về kiến thức, kinh phí, thiết bị…đề tài chưa thật hoàn chỉnh, song sản phẩm cũng đạt được một số nội dung nhất định. Làm cơ sở để những người thực hiện có cơ hội tiếp cận với thực tế sản xuất và ôn lại kiến thức đã học.
Phần C
PHỤ LỤC
TÀI LIỆU THAM KHẢO
Phụ lục A: Yêu cầu kĩ thuật cho trứng gà trong quá trình ấp
|
Máy ấp, máy nở |
Ngày ấp |
Nhiệt độ (0C) |
|
|
Máy ấp
|
1 |
37.8 |
|
|
2 |
37.8 |
65% |
|
|
3 |
37.8 |
|
|
|
4 |
37.8 |
|
|
|
5 |
37.8 |
60% |
|
|
6 |
37.8 |
|
|
|
7 |
37.8 |
|
|
|
8 |
37.8 |
|
|
|
9 |
37.8 |
55% |
|
|
10 |
37.8 |
|
|
|
11 |
37.8 |
|
|
|
12 |
37.8 |
|
|
|
13 |
37.8 |
50% |
|
|
14 |
37.8 |
|
|
|
15 |
37.8 |
|
|
|
16 |
37.5 |
|
|
|
17 |
37.5 |
50% |
|
|
Chuyển sang máy nở |
18 |
37.85 |
|
|
|
19 |
37.0 |
59% |
|
|
20 |
37.0 |
64% |
|
Ngày nở |
21 |
37.0 |
70% |
|
|
22 |
Ra gà (gà nở) |
|
Bảng a.Yêu cầu nhiệt độ và độ ẩm cho quá trình ấp trứng gà
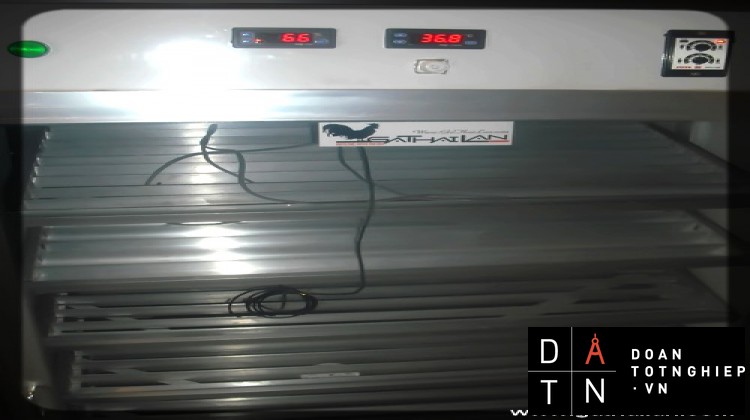
Phụ lục B: Hình ảnh máy ấp trứng
Đây là hình ảnh máy ấp trứng của cơ sở ấp trứng tư nhân Vĩnh Long-Hẻm 576 đường Nguyễn Duy Trinh, P. Bình Trưng Đông, Quận 2. Cơ sở chuyên cung cấp gà giống và vịt giống. Máy được sản xuất tại cơ sở này, hiệu suất nở khoảng 60%-70%.
Hình a. Máy ấp trứng
Hình b. Bảnđiều khiển
Phụ lục C: Sơ đồ bố trí linh kiện các Module
Hình c. Sơ đồ bố trí linh kiện Module Slave
Hình d. Sơ đồ bố trí linh kiện Module Master
Hình e. Sơ đồ bố trí linh kiện Module giao tiếp máy tính
TÀI LIỆU THAM KHẢO
[1] Đo lường và điều khiển bằng máy tính
NGÔ DIÊN TẬP
Nhà xuất bản Khoa học và Kỹ thuật (2000)
[2] Họ Vi điều khiển 8051 TỐNG VĂN ON
HOÀNG ĐỨC HẢI
Nhà xuất bản Lao động – Xã hội (2001)
[3] Kỹ thuật ghép nối máy tính
NGÔ DIÊN TẬP
Nhà xuất bản Khoa học và Kỹ thuật (2000)
[4] Lập trình ghép nối máy tính trong Window
NGÔ DIÊN TẬP
Nhà xuất bản Khoa học và Kỹ thuật (2001)
[5] Giáo trình lý thuyết và bài tập Borland Delphi
LÊ PHƯƠNG LAN
HOÀNG ĐỨC HẢI
Nhà xuất bản Giáo dục (2000)
[6] Website bộ nông nghiệp và phát triển nông thôn
http://www.vcn.vnn.vn
PHỤ LỤC:
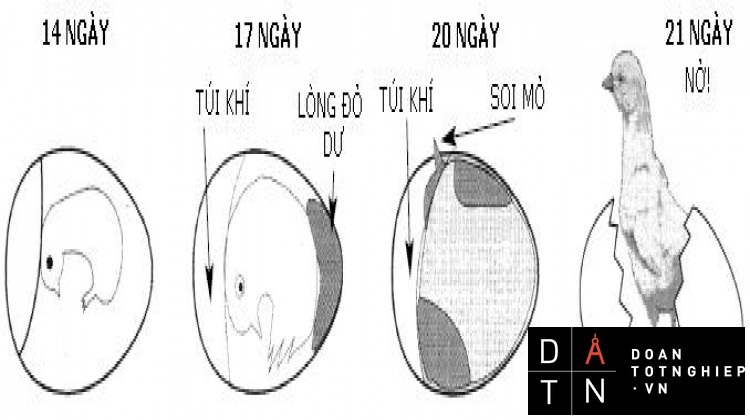
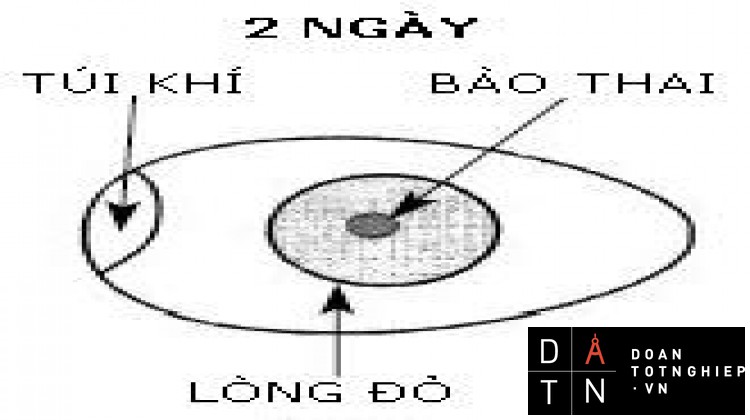
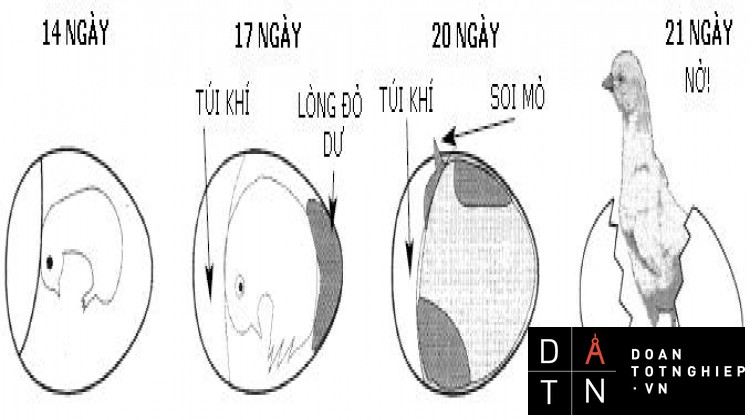
2.1. Sự phát triển của bào thai (trứng gà)
Lòng đỏ rơi từ buồng trứng vào phễu (unfundibilum) nơi nó được thụ tinh bởi tinh trùng gà trống (nếu có).
Bào thai bắt đầu phát triển trong khi lòng đỏ di chuyển xuống ống dẫn trứng. Tại đây nó nhận được lớp vỏ lòng trắng.
Trứng phát triển thêm phần vỏ bao gồm lớp màng và vỏ cứng.
Sau khi được đẻ, trứng nguội đi và phát triển chậm lại hoặc ngừng hẳn. Nhiều loài điểu cầm (không phải tất cả) đẻ xong một “lứa” trứng rồi mới ấp. Trong thời gian “chờ đợi” này, nhiệt độ lý tưởng giữa 0 và 20 độ C nhưng một số loài chịu được nhiệt độ khắc nghiệt hơn. Tuy nhiên, nhiệt độ khắc nghiệt phát sinh nguy cơ chết thai.
Trong ngày ấp đầu tiên, một đường gọi là vạch sơ khai xuất hiện. Nó cho phép ba lớp tế bào hình thành. Từ các tế bào mới này mà những cơ quan nội tạng ra đời. Ba lớp tế bào này có tên ectoderm, mesoderm và endoderm.
Ectoderm tạo da, lông, mỏ, hệ thần kinh, móng, mắt và miệng. Mesoderm tạo xương, cơ, máu và cơ quan sinh sản. Endoderm tạo cơ quan hô hấp, hệ tiêu hóa và nội tiết.
Vào cuối ngày ấp đầu tiên, đầu, mắt, hệ thần kinh và mạch máu bắt đầu hình thành. Tim hình thành vào ngày thứ hai và bắt đầu hoạt động sau 44 giờ.
Vào ngày thứ tư, tim phát triển từ dạng đơn giản thành dạng hoàn thiện cùng với nhịp tim.
Vào thời điểm này, những màng đặc biệt được hình thành để tạo ra túi ối (amniotic sack). Từ giờ, bào thai nổi lơ lửng trong dịch ối cho đến cuối quá trình ấp.
Dịch ối và việc đảo trứng nhằm đảm bảo cho bào thai tự định hướng phù hợp cho việc nở.
Vào ngày thứ tư, chân và cánh bắt đầu hình thành và tim vẫn còn nằm bên ngoài cơ thể.
Vào ngày thứ sáu, chân và cánh hầu như đã hoàn tất, và vào ngày thứ tám, lông bắt đầu hình thành.
Vào ngày thứ chín, bào thai bắt đầu có hình gà con. Bây giờ, tim đã nằm bên trong cơ thể với tuần hoàn máu với bên ngoài thông qua rốn (umbilicus).
Vào ngày thứ mười, xương bắt đầu hình thành.
Ngày thứ mười ba, lông măng (down) bắt đầu xuất hiện và có màu.
Vào ngày thứ mười sáu, mỏ, vảy và móng hầu như hoàn tất. Lòng trắng được tiêu thụ hết và chỉ còn xót lại chút lòng đỏ.
Dịch ối giảm và rồi lòng đỏ đóng vai trò thức ăn. Vào ngày thứ mười chín, lòng đỏ tách rời khỏi thân.
Khả năng bào thai hay giờ là “gà con” lấy ô-xy qua lớp vỏ và hệ tuần hoàn còn hạn chế. Lượng carbon dioxide trong máu do đó cao đáng kể, gây ra sự co giật ở cơ cổ. Sau đó mỏ tự đẩy vào túi khí ở đầu to của trứng.
Bây giờ mỏ tự mở lần đầu và phổi dãn ra. Điều này khiến cho mạch máu trong phổi hoạt động. Đây là thời điểm rất căng thẳng đối với gà bởi mọi sự thiếu hụt đều trở nên nghiêm trọng. Căng thẳng nhiều đến nỗi nó sẽ làm chết những con gà không mạnh mẽ, nhất là những con thiếu vitamin nhóm B.
Gà tiếp tục thở ngày càng nhiều khiến cơ cổ co giật nhiều hơn và hy vọng đủ mạnh để phá vỡ lớp vỏ. Quá trình này buộc mỏ thúc ra ngoài và đục một lỗ nhỏ trên thành vỏ. Các chân hơi chỏi thân gà sang bên vì vậy ở cú co giật kế tiếp, một mảnh vỏ nữa sẽ bị phá. Việc này cứ tiếp tục vòng quanh vỏ cho đến khi nó vỡ ra.
Gà có “răng trứng” (egg tooth) hỗ trợ cho quá trình nở. Răng sẽ rụng sau khi nở.
Sau khi vỏ vỡ, gà sẽ tự thoát ra khỏi vỏ. Những màng và mạch máu cũ vẫn dính liền với vỏ.
2.2. Dinh dưỡng của trứng
Trứng chứa nhiều dưỡng chất lấy từ cha mẹ vì vậy, để đảm bảo trứng nở, cha mẹ cần được cho ăn đầy đủ dưỡng chất ít nhất hai tuần trước khi đẻ. Những vitamin và khoáng chất quan trọng nhất được liệt kê dưới đây:
• Vitamin A – Nguồn thức ăn có nhiều chất này là rau xanh, vàng, bắp và thực phẩm tổng hợp. Vitamin có thể bị ánh sáng và nhiệt phân hủy một cách nhanh chóng. Việc thiếu vitamin này là nguyên nhân phổ biến khiến tỷ lệ nở kém, con yếu và kháng bệnh kém.
• Vitamin D – Nguồn cung cấp loại vitamin này là ánh sáng. Gà nuôi nhốt trong nhà cần được bổ sung. Thiếu nó sẽ làm xương yếu chẳng hạn như cong và dị dạng. Vỏ trứng cũng có thể trở nên dị dạng do gà thiếu can-xi tạo vỏ, hậu quả là việc kiểm soát sự mất nước sẽ khó khăn.
• Vitamin E – Nguồn chất này nằm ở các loại mầm hạt, chẳng hạn như lúa mì. Việc thiếu chất sẽ dẫn đến kết quả nở kém chẳng hạn yếu ớt và chậm lớn. Hầu hết gà đều chết vì bệnh máu khi thành mạch máu bị bể.
• Vitamin K – Có thể tìm thấy trong hầu hết các loại rau xanh. Thiếu chất này có thể gây ra xuất huyết. Trong trứng, bào thai có thể chết vì va chạm khi đảo.
• Vitamin nhóm B
– Vitamin B1 – Thiamine
– Vitamin B2 – Riboflavin
• Nicotinic Acid hay Niacin
• Vitamin B6 Pyridoxine
• Pantothenic Acid
• Biotin
• Folic Acid
• Vitamin B12
• Khoáng chất
• Can-xi
• Phốt-pho
• Măng-gan
• Ma-nhê
• Kẽm
2.3. Lưu trữ và xử lý trứng
Chất lượng con hoàn toàn phụ thuộc vào chất lượng trứng. Việc lưu trữ và xử lý trứng là vô cùng quan trọng. Xin nhấn mạnh rằng, một khi được đẻ ra, chất lượng trứng không thể cải thiện thêm mà có thể bị hủy hoại nếu việc lưu trữ và xử lý kém. Dưới đây là những yếu tố giúp đảm bảo chất lượng trứng tốt nhất có thể:
LƯU Ý: Trứng phải được lưu trữ với đầu nhọn chúc xuống.
• Nhiệt độ
Nhiệt độ lưu trữ lý tưởng là từ 12 đến 15 độ C. Trữ ở nhiệt độ quá cao thì tỷ lệ nở sẽ bị ảnh hưởng. Điều này sẽ làm giảm khả năng phát triển bình thường của bào thai. Nếu trữ ở nhiệt độ quá lạnh, vỏ trứng có thể bị vỡ ảnh hưởng đến sự phát triển của bào thai.
• Độ ẩm
Độ ẩm lý tưởng là từ 75 đến 85% để tránh mất nước trước khi ấp.
• Thời gian trữ
Thay đổi tùy loài, tốt nhất không nên trữ trứng lâu hơn 7 ngày trước khi ấp. Từ ngày 7 đến 14, khả năng nở sẽ suy giảm đáng kể. Vitamin bị phân hủy và màng bị mục theo thời gian và vì vậy bào thai sẽ chết yểu.
• Vệ sinh
Phải loại bỏ những trứng quá dơ, nứt và dị dạng. Trứng dơ có thể được rửa sạch bằng dung dịch vệ sinh trứng chẳng hạn như Brinsea Incubation Disinfectant Concentrate theo hướng dẫn của nhà sản xuất. Dung dịch rửa nên ấm hơn so với trứng để sự dãn nở khiến chất dơ có xu hướng đi ra khỏi các mao mạch thay vì đi vào. Luôn nhớ rằng mọi dung dịch đều tẩy bỏ lớp sừng cùng với chất dơ khỏi vỏ trứng và khiến trứng có nguy cơ nhiễm khuẩn cao hơn trong tương lai.
• Đảo trứng khi lưu trữ
Trứng phải được đảo mỗi ngày một lần, 45 độ theo hướng này, đảo ngược lại, rồi lại tiến lên. Đảo không đủ sẽ khiến lòng đỏ nổi lên và chạm vào màng vỏ. Nếu lòng đỏ bị chạm thì nó sẽ dính chặt và ngăn cản sự phát triển của bào thai khi ấp trứng.
• Xử lý trứng một cách cẩn trọng
Trứng cần được xử lý một cách cẩn trọng vì mọi sự va chạm đều có thể phá hủy màng trứng, thậm chí kể cả khi vỏ trứng còn y nguyên. Sự cẩn trọng cũng áp dụng cho cả quá trình ấp. Va chạm có thể làm vỡ mạch máu khiến con non xuất huyết đến chết.
• Thu hoạch trứng
Thông thường, thời gian tốt nhất để thu hoạch trứng là trước 9 giờ sáng và kiểm tra một lần nữa vào buổi trưa. Trứng không được để trong ổ lâu hơn 24 giờ bởi sẽ có xu hướng nở kém.
• Hình dạng trứng, cấu trúc và chất lượng vỏ
Một số trứng dị dạng bẩm sinh có tỷ lệ nở thấp hơn bình thường. Trứng nhỏ thường có tỷ lệ lòng đỏ so với lòng trắng cao hơn. Trứng to đôi khi có “hai lòng đỏ” sẽ không nở. Trứng dị dạng thường có tật ở vỏ.
Điều quan trọng cần nhớ rằng trong tự nhiên, trứng thường được làm nóng từ từ. Máy ấp thường làm nóng nhanh chóng, và vì vậy nếu đặt trứng trong máy ấp ngay lập tức thì trứng có thể bị sốc nhiệt. Nếu có thể, nên làm nóng trứng một cách chậm rãi.
3. Cấu tạo và chức năng của máy ấp trứng
3.1. Giới thiệu
Máy ấp trứng (incubator) là loại máy cung cấp một môi trường phù hợp và có kiểm soát cho sự phát triển của phôi. Tùy vào mức độ phức tạp, một máy ấp trứng sẽ có nhiều cấp độ điều khiển về nhiệt độ, độ ẩm, đảo trứng, thông khí và vệ sinh, trong khi vẫn là nơi bảo vệ trứng.
Máy ấp trứng có thể được phân loại tùy theo cách thông khí, bao gồm ấp tĩnh (still air), quạt (forced draft) và tiếp xúc (contact). Máy ấp tiếp xúc là thế hệ máy mới được thiết kế để giả lập gần hơn với môi trường ấp tự nhiên.
3.2. Máy ấp tĩnh
Máy ấp tĩnh là loại máy ấp cơ bản nhất. Một máy ấp tĩnh về cơ bản là một hộp cách ly bao gồm:
• Nguồn cung cấp nhiệt
• Bộ điều khiển nhiệt độ hay còn gọi là bộ ổn nhiệt (thermostat)
• Khay trứng
• Nhiệt kế (thermometer) đo nhiệt độ không khí
• Khay nước
• Một số máy có thể có ẩm kế (hygrometer)
• Một số máy có thể có cơ chế đảo trứng tự động
Không khí bên trong bộ ấp tĩnh được điều hòa nhờ sự đối lưu (convection). Một khi được sưởi nóng, không khí tỏa ra và đi lên nóc máy ấp. Lượng khí lưu thông trong máy ấp tĩnh do đó được xác định bởi tỷ lệ nhiệt độ giữa bên trong với bên ngoài máy. Để thông khí tốt, lỗ thông khí thường được bố trí ở phần đáy và nắp của máy ấp. Bên trong máy ấp tĩnh, khí ấm di chuyển lên trên vì vậy nhiệt độ thay đổi tùy vào độ cao (xem hình dưới). Do đó điều quan trọng là máy ấp phải được đặt trên bề mặt bằng phẳng và tất cả trứng đều phải có cùng kích thước.
3.3. Máy ấp quạt
Máy ấp quạt được thiết kế để khắc phục tình trạng chênh lệch nhiệt độ bên trong máy ấp. Một chiếc quạt được bố trí để điều hòa không khí nhằm tạo ra nhiệt độ đồng nhất bên trong máy ấp. Do đó, nhiệt độ không khí xung quanh trứng luôn ổn định và vị trí lắp đặt các cảm biến nhiệt độ và độ ẩm không cần quá khắt khe. Trứng cũng có thể có kích thước khác nhau và đặt trong các khay ở độ cao khác nhau.
Việc sử dụng máy ấp quạt cũng cho phép sử dụng nhiệt kế wet bulb (giải thích kỹ sau) mà nó cũng có thể được dùng để đọc độ ẩm một cách chính xác. Việc kiểm soát độ ẩm trong máy ấp quạt quan trọng hơn so với máy ấp tĩnh, nhằm ngăn ngừa luồng khí khiến trứng bị khô.
3.4. Máy ấp tiếp xúc
Máy ấp tiếp xúc mô phỏng quá trình ấp tự nhiên bên trong ổ.
Khác biệt lớn nhất giữa ấp tự nhiên với ấp nhân tạo ở chỗ cha mẹ cung cấp hơi ấm thông qua tiếp xúc thay vì khí ấm bao quanh trứng. Điều này ban đầu có vẻ không quan trọng lắm nhưng một nghiên cứu của J. Scott Turner tại đại học bang New York và đại học Cape Town đã hé lộ những khác biệt không mong đợi về phản ứng trước nhiệt độ của trứng được ấp theo lối tiếp xúc so với đối lưu khí. Chủ yếu, trứng trong máy ấp quạt có nhiệt độ bao quanh hầu như đồng nhất; nhiệt độ phôi thai phần nào gia tăng vào cuối quá trình ấp vì lượng trao đổi chất gia tăng nhưng mặt khác toàn bộ trứng vẫn được duy trì ở nhiệt độ máy ấp. Ngược lại, trứng được ấp tự nhiên hay bằng máy ấp tiếp xúc, có sự khác biệt đáng kể về nhiệt độ. Nhiệt truyền vào trứng qua một vùng tiếp xúc tương đối nhỏ, mà nó tương đối ấm hơn so với những vùng khác và bị tiêu tán ở hầu hết những vùng còn lại vốn mát hơn.
Với ấp tiếp xúc, nhiệt độ phôi thai có xu hướng giảm xuống vào giai đoạn cuối của quá trình ấp bởi tuần hoàn máu của chính phôi thai, mà nó trở nên quan trọng hơn sự trao đổi chất trong việc phân phối nhiệt bên trong trứng, điều hoàn toàn trái ngược với quan điểm trước đây cho rằng sự trao đổi chất là quan trọng nhất và nó khiến nhiệt độ trứng tăng lên. Việc phôi thai phát triển to hơn và phải di chuyển từ vị trí ban đầu ở chóp lòng đỏ xuống dưới đến vùng mát hơn, cũng có xu hướng hạ nhiệt phôi thai theo quá trình ấp. Phát hiện quan trọng này chứng tỏ sự khác biệt đáng kể giữa ấp tự nhiên và nhân tạo, nhưng vẫn còn những vấn đề khác nữa.
Ấp trứng tự nhiên chắc chắn bao gồm các chu kỳ sưởi và làm mát kết hợp với thông khí bởi cha mẹ phải rời tổ đi kiếm ăn và bảo vệ lãnh thổ, v.v…
Loại máy ấp tiếp xúc đầu tiên của hãng Brinsea, máy ấp “Contaq” được coi như là vật thay thế cho cha mẹ và tổ. Nắp gắn “da” mô phỏng chức năng ấp của cha mẹ; cung cấp hơi ấm từ mặt trên của trứng, nhưng cũng có cơ chế tháo dỡ định kỳ và như vậy, cung cấp đủ dưỡng khí theo cách thức như thể cha mẹ đứng lên và rời khỏi tổ. “Da” mềm mại nhưng áp chặt vào trứng bởi áp suất không khí nhẹ, đảm bảo việc dẫn nhiệt tốt.
Máy ấp thay thế cho “ổ” trong việc cung cấp một môi trường an toàn cho trứng, khe trống giữa các trục đỡ cho phép người vận hành điều khiển mức độ thông khí cho trứng. Tổ của những loài điểu cầm khác nhau có những đặc điểm rất khác nhau, đặc biệt là về độ thẩm thấu khí. Điều này lại ảnh hưởng đến sự mất nước của trứng, vì vậy cần điều chỉnh trục đỡ một cách tương ứng. Nếu cần, độ ẩm được bổ sung một cách tự động. Ý tưởng kết hợp trục đỡ với độ ẩm tốt nhất nên dựa vào việc kiểm tra trọng lượng trứng và theo dõi sự mất nước. Khay trứng không được sưởi nóng một cách trực tiếp.
Máy ấp “Contaq” cũng có cơ chế đảo trứng tinh tế và tự động cho các loại trứng với kích cỡ khác nhau. Việc đảo trứng được kết hợp với tháo dỡ “da” và chương trình đảo cố định hay ngẫu nhiên.
3.5. Yêu cầu thiết kế
NHIỆT ĐỘ
Nhiệt độ ấp phù hợp là yêu cầu quan trọng nhất để trứng nở thành công. Thậm chí sai biệt nhỏ về nhiệt độ có thể ảnh hưởng đến tỷ lệ nở, dẫu sai biệt này không tác động nhiều đến trứng trong trường hợp ấp tiếp xúc. Quá trình tăng trưởng của phôi thai rất nhạy cảm với nhiệt độ và chỉ một sai lệch nhỏ cũng có thể gây ảnh hưởng dẫn đến phôi chết hoặc khuyết tật. Thiết kế của các máy ấp hiệu Brinsea cho phép sai số tối đa ±0.25 độ C trên khay trứng và ±0.25 độ C trong một giai đoạn ấp.
Phần chính giữa trứng hay phôi thai là quan trọng nhất. Để đảm bảo thông số quan trọng này được chính xác, máy ấp cần được cài đặt một cách chính xác, đặc biệt là máy ấp tĩnh. Máy ấp tĩnh biến thiên nhiệt độ từ nóc xuống đáy, do đó cảm biến điều khiển nhiệt độ và nhiệt kế cần được gắn gần với chóp trứng. Ở đây, nhiệt độ cần phải hơi cao hơn các máy ấp quạt và có ghi trong phần hướng dẫn. Do đó, cần hết sức tuân thủ hướng dẫn của nhà sản xuất máy ấp.
ĐỘ ẨM
Độ ẩm ít quan trọng hơn so với nhiệt độ. Một cách lý tưởng, trứng cần giảm từ 3-15% trọng lượng từ lúc mới đẻ cho đến khi nở (nhiều hơn với các loài chim non thiếu lông). Độ ẩm có thể biến thiên nhiều nhưng không tốt trong trường hợp chim non mất trọng lượng lúc mới nở. Lỗi này có thể được điều chỉnh sau đó.
Kinh nghiệm cho thấy máy ấp tiếp xúc ít cần độ ẩm chính xác, có lẽ là vì trứng được ở trong môi trường thông khí tự nhiên hơn. Không bao giờ thừa, mọi máy ấp quạt hay tiếp xúc của Brinsea đều có bộ điều khiển độ ẩm số (digital humidity control).
Tỷ lệ sút cân thay đổi tùy thuộc vào loại trứng, mức độ thông khí, xử lý trứng, khẩu phần gà giống và thời điểm trứng nở trong mùa. Có hai chỉ dẫn xác định độ ẩm thích hợp.
Đầu tiên là túi khí (air cell). Túi khí gia tăng theo quá trình ấp. Để nhìn thấy, cần phải soi trứng (chương 4).
Chỉ dẫn khác là sút cân. Nếu bạn cân trứng trước và trong quá trình ấp, sự sút cân có thể vẽ thành biểu đồ (xem ví dụ ở dưới) để xác định xem mức sút cân trung bình có cần điều chỉnh không.
Độ ẩm có thể được điều chỉnh tùy theo biểu đồ diễn tiến tại một thời điểm nhất định trong quá trình ấp. Theo quy luật chung, nếu trọng lượng thực tế thấp hơn lý tưởng thì cần tăng độ ẩm. Nếu trọng lượng thực tế cao hơn lý tưởng thì cần giảm độ ẩm.
Máy ấp nên có chức năng điều chỉnh độ ẩm. Có hai yếu tố ảnh hưởng đến độ ẩm. Đó là diện tích bay hơi và lượng khí đối lưu. Diện tích bay hơi càng lớn và đối lưu càng nhỏ thì độ ẩm càng cao. Một cách để gia tăng diện tích bay hơi là sử dụng tấm hút ẩm hay giấy thấm. Sau cùng, môi trường đặt máy ấp cũng có thể ảnh hưởng đến việc điều khiển nhiệt độ. Nếu không khí bên ngoài rất khô thì độ ẩm trong máy có thể thấp hơn so với trường hợp không khí ẩm. Cũng vậy, khí lạnh không thể chứa nhiều hơi nước, vì vậy khi không khí mùa đông được sưởi ấm thì độ ẩm sẽ rất thấp. Điều này xảy ra khi sưởi ấm nhà vào mùa đông và trong máy ấp cũng vậy. Kết quả là độ ẩm nhìn chung thấp hơn vào mùa đông so với mùa hè và vì vậy mà độ ẩm phải được điều chỉnh tương ứng.
Một số nhà lai tạo tiến bộ thật xa trong việc điều khiển môi trường phòng ấp và khắc phục những biến đổi về độ ẩm không khí theo mùa. Trong trường hợp đặc biệt, một phần vỏ trứng sẽ được đục bỏ để gia tăng sự mất nước hay dán băng keo để hạn chế sự mất nước. Dẫu vậy, cách này rất rủi ro và chỉ dành cho các chuyên gia.
Yêu cầu về độ ẩm khi gà nở cao hơn trong quá trình ấp. Trong những ngày cuối, độ ẩm cao giúp ngăn ngừa màng trứng khô quá nhanh khi trứng nở và trở nên cứng và khó xé rách. Do đó độ ẩm khi gà nở nên tối thiểu là 60%.
ĐẢO
Bởi vì bào thai phát triển trên lòng đỏ, nó sẽ khiến phần lòng đỏ đó trở nên nhẹ hơn và nổi lên trên. Nếu sau khi đảo trứng mà bào thai chúc đầu xuống thì nó sẽ khiến lòng đỏ xoay trong lớp lòng trắng cho đến khi nổi lên lại.
Lòng đỏ được giữ bởi một cấu trúc gọi là dây chằng (chalaza) và màng. Nó luôn có xu hướng nổi lên trên, làm biến dạng lớp màng trong và nhanh chóng đụng vào màng vỏ. Nếu điều này xảy ra với bào thai thì chóp của nó sẽ dính vào vỏ và chết. Vì lý do đó, việc đảo trứng là cần thiết để duy trì sự sống sót của bào thai.
Khi đảo trứng, bào thai được kéo vào vùng giàu dưỡng chất, điều giúp nó phát triển. Điều này cực kỳ quan trọng trong tuần đầu tiên khi bào thai chưa phát triển hệ tuần hoàn. Sau một tuần, trứng vẫn cần được đảo nhưng không thường xuyên. Cơ chế đảo khác nhau tùy loài và chim non thiếu lông (altricial) có xu hướng cần đảo nhiều hơn so với chim non đủ lông (precocial). Trong khi trứng gà cần đảo 80 độ sau mỗi giờ nhưng trứng vẹt cần đảo 180 độ, nhiều lần mỗi giờ vào giai đoạn sớm.
Các máy ấp ngày nay có bốn cơ chế đảo:
i) Khay đảo (tilting tray)
Hầu hết các máy ấp trứng thương mại đều có khay giữ trứng thẳng đứng, với đầu nhỏ chúc xuống. Sau dó khay được đảo mỗi bên một góc 40 độ so với chiều ngang (tổng cộng 80 độ) theo một chế độ định trước, chẳng hạn đảo mỗi giờ. Phương pháp này hiệu quả với gia cầm nên được phát triển và ứng dụng rộng rãi ở cấp độ thương mại. Tuy nhiên, kỹ thuật này rất khác với cách thức tự nhiên của các loài điểu cầm. Vì vậy, nó chỉ tốt với các loài gia cầm, mà không tốt với các loài chim.
ii) Sàn cuộn (moving floor)
Với máy ấp cỡ nhỏ không cần đặt nhiều lớp trứng, trứng được đặt trên sàn phẳng hay băng chuyền chuyển động. Trứng không bị kéo đi nhờ những tấm chắn cố định, bởi vậy mà nó xoay. Kỹ thuật đảo này thích hợp với loại trứng khá đối xứng giữa hai đầu, chẳng hạn như trứng vịt, nhưng trứng chóp nhọn lại có xu hướng tụ với nhau.
iii) Trục xoay (roller)
Trục xoay hoạt động theo nguyên lý xoay trục đỡ. Trứng nằm trên các trục đỡ mà chúng lại nằm trên sàn cuộn. Thành trục giúp giảm áp lực đè lên trứng khi “xoay” dọc theo trục.
iv) Khay đảo bán nguyệt (trough – channel)
Khay đảo bán nguyệt dùng để đảo các loại trứng rất nhỏ, chẳng hạn như trứng cút. Nhược điểm của loại khay này là góc đảo rất nhỏ.
4. Theo dõi trứng và máy ấp
Trứng cần được theo dõi trong quá trình ấp để kiểm tra sự phát triển của bào thai và để xem có cần điều chỉnh máy ấp hay không.
4.1. Soi trứng (candling)
Đèn soi là đèn với tia hội tụ mà nó soi qua vỏ trứng làm hiển thị nội dung bên trong. Nó cho phép xác định kích thước của túi khí nhờ vậy mà có thể đoán được tốc độ sút cân. Nếu túi khí lớn hơn mong đợi thì mất nước quá nhiều và độ ẩm bên trong máy ấp cần được nâng lên để bù vào tốc độ mất nước. Nếu túi khí nhỏ hơn mong đợi thì làm ngược lại.
Soi trứng cũng cho phép theo dõi sự phát triển của trứng nhằm loại bỏ những trứng không đậu hoặc chết một cách an toàn khỏi máy ấp.
1. Trong – có lẽ trứng không có trống (hoặc chết yểu) khi soi tại 1/3 giai đoạn ấp.
2. Có trống với mạch máu đỏ - sau 1/3 giai đoạn ấp.
3. Lem đỏ hay đen - trứng chết yểu khi soi sau 1/3 giai đoạn ấp.
4. Bào thai với “vòng” máu đỏ - trứng chết yểu khi soi sau 1/3 giai đoạn ấp.
5. Viền sẫm với nội dung bất thường - trứng chết muộn (1/2 hay 1/3 giai đoạn ấp).
6. Bào thai sống với mỏ nằm trong túi khí - trứng sẽ nở trong vòng 24 - 48 tiếng.








