Hộp tốc độ dùng cơ cấu bánh răng di trượt có các thông số sau máy tiện Đề 13
NỘI DUNG ĐỒ ÁN
Hộp tốc độ dùng cơ cấu bánh răng di trượt có các thông số sau máy tiện Đề 13, động học máy Hộp tốc độ dùng cơ cấu bánh răng di trượt có các thông số sau máy tiện Đề 13, kết cấu Hộp tốc độ dùng cơ cấu bánh răng di trượt có các thông số sau máy tiện Đề 13
Phần I: THIẾT KẾ HỘP TỐC ĐỘ
Hộp tốc độ dùng cơ cấu bánh răng di trượt có các thông số sau (máy tiện):
- Số vòng quay nhỏ nhất của trục chính: nmin = 6,3 vòng/phút.
- Số vòng quay lớn nhất của trục chính: nmax = 2500 vòng/phút.
- Công bội của chuỗi số vòng quay: φ = 1,41.
- Động cơ có công suất N = 2kW; số vòng quay nđc = 1450 vòng/phút.
I. XÁC ĐỊNH CÁC THÔNG SỐ ĐỘNG HỌC CƠ BẢN CỦA HỘP TỐC ĐỘ:
1. Xác định các thông số động học cơ bản của hộp tốc độ:
* Phạm vi điều chỉnh số vòng quay:
Rn =
* Số cấp tốc độ của trục chính Z:
Z =
Số vòng quay lớn nhất của trục chính:
nmax = n1.φZ-1 = n1.φ17 = 6,3.1,4117 = 2200 vòng/phút
Tra các số vòng quay tiêu chuẩn ta có: (vòng/phút)
|
n1 |
n2 |
n3 |
n4 |
n5 |
n6 |
n7 |
n8 |
n9 |
|
6,3 |
9 |
12,5 |
18 |
25 |
35,5 |
50 |
71 |
100 |
|
n10 |
n11 |
n12 |
n13 |
n14 |
n15 |
n16 |
n17 |
n18 |
|
140 |
200 |
280 |
400 |
560 |
800 |
1120 |
1600 |
2240 |
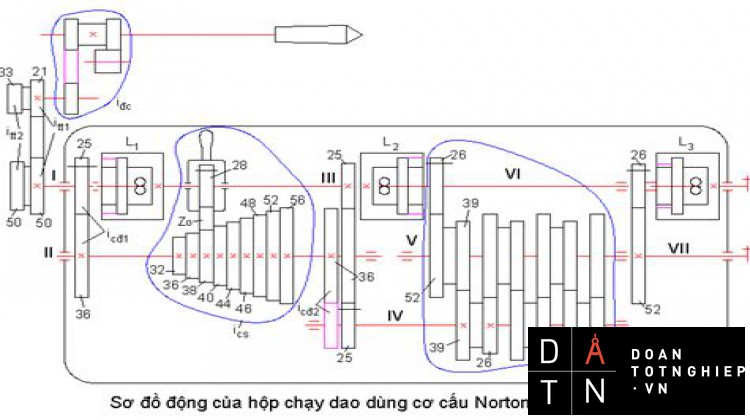
2. Phân tích lựa chọn PAKG:
- PA1: truyền động đơn giản
Z = 18 = 3x3x2 = 3x2x3 = 2x3x3
Kiểm tra Ri đều > 8 nên PA này không phù hợp.
- PA2: truyền động phức tạp
Z = 18 = 2.(1+2.2.2) = 3.(2+2.2) = 3.(3+3.1)
Các PA này thỏa mãn đk Ri nhưng không thỏa đk T nên không vẽ được ĐTSVQ → loại
Để thõa mãn Ri và T ta thêm trục trung gian
→ PA mới: Z = 2.(1.1.3 + 1.3.2)
3. Vẽ lưới kết cấu và kiểm tra Ri:
Z = 2.(1.1.3 + 1.3.2) = 18
Đường truyền tốc độ nhanh: Z0Z’ = 2.1.1.3 = 6
PATT : I-II-III-IV-V: Z0Z’= 2[1].1[0].1[0].3[2] = 6
Đường truyền tốc độ chậm: Z0Z” = 2.1.3.2 = 12
PATT : I-II-III-IV-V: Z0Z’’= 2[1].1[0].3[2].2[6] = 12
Ri = φ(p-1)xi = 1,41(2-1).6 ≈ 8 (thõa đk)
Kiểm tra T để vẽ được ĐTSVQ: số ô tối thiểu (Z-1) = 17 ô
T = A + B + C ≥ Z-1
A = Z0 -1 = 2-1 = 1 ô
B = nmax. w1 = 2.3 = 6 ô
C = mmax. w2 = 4.3 = 12 ô
→ T = 19 ô (thỏa đk vẽ ĐTSVQ)
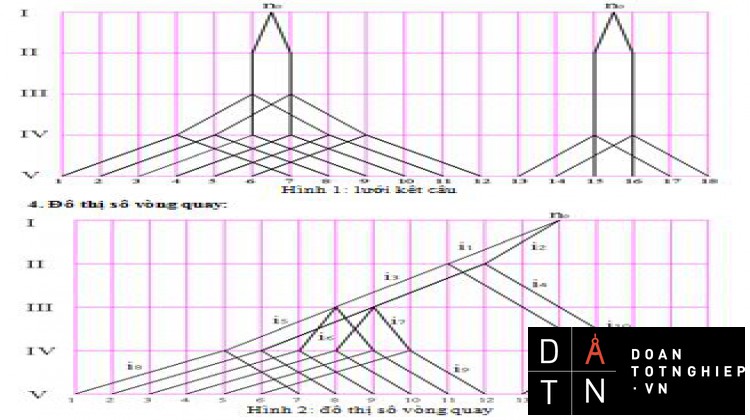
Hình 1: lưới kết cấu
4. Đồ thị số vòng quay:
Hình 2: đồ thị số vòng quay
- Xác định và kiểm tra TST:
i1
i11 = ; i12 = 1 ; i13 =
Ta thấy imin = 0,253 > 0,25 (thõa đk TST)
imax ≈ 2 (thõa đk TST)
Chọn n0 = n14 = 560 v/p, tỉ số truyền từ động cơ đến trục I là:
iđ =
Vậy đường kính bánh dẫn Dđ = 110 mm; đường kính bánh bị dẫn = 280 mm
5. Xác định số răng của các cặp bánh răng:
Dùng phương pháp tra bảng ta có
|
i |
i1 = |
i2 = |
i3 = |
i4 =1,98 |
i5 = |
i6 = |
i7=1,41 |
i10 = 1,98 |
|
Zi:Zi’ |
22:62 |
28:56 |
24:68 |
61:31 |
25:71 |
40:56 |
56:40 |
64:32 |
|
åZ |
84 |
92 |
96 |
|||||
|
i |
i8 = |
i9 =1,98 |
i11 = |
i12 =1 |
i13 = |
|
Zi:Zi’ |
23:91 |
76:38 |
38:76 |
57:57 |
76:38 |
|
åZ |
114 |
||||
6. Vẽ sơ đồ động và sơ đồ truyền lực:
7. Kiểm tra sai số vòng quay:
7.1. Tính các số vòng quay thực tế:
ntt1 = nđc .iđ .i1.i3.i5.i8 = (vg/ph)
ntt2 = nđc .iđ .i2.i3.i5.i8 = (vg/ph)
ntt3 = nđc .iđ .i1.i3.i6.i8 = (vg/ph)
ntt4 = nđc .iđ .i2.i3.i6.i8 = (vg/ph)
ntt5 = nđc .iđ .i1.i3.i7.i8 = (vg/ph)
ntt6 = nđc .iđ .i2.i3.i7.i8 = (vg/ph)
ntt7 = nđc .iđ.i1.i3.i5.i9 = (vg/ph)
ntt8 = nđc .iđ .i2.i3.i5.i9 = (vg/ph)
ntt9 = nđc .iđ .i1.i3.i6.i9 = (vg/ph)
ntt10 = nđc .iđ .i2.i3.i6.i9 = (vg/ph)
ntt11 = nđc .iđ .i1.i3.i7.i9 = (vg/ph)
ntt12 = nđc .iđ .i2.i3.i7.i9 = (vg/ph)
ntt13 = nđc .iđ .i1.i4.i10.i11 = (vg/ph)
ntt14 = nđc .iđ .i2.i4.i10.i11 = (vg/ph)
ntt15 = nđc .iđ .i1.i4.i10.i12 = (vg/ph)
ntt16 = nđc .iđ .i2.i4.i10.i12 = (vg/ph)
ntt17 = nđc .iđ.i1.i4.i10.i13 = (vg/ph)
ntt18 = nđc .iđ .i2.i4.i10.i13 = (vg/ph)
7.2. Kiểm tra điều kiện sai số vòng quay:
Với
Có thể lấy trị số trung bình
Sai số giữa số vòng quay thực tế của máy so với số vòng quay tiêu chuẩn được xác định bởi công thức sau:
Bảng đánh giá sai số vòng quay:
|
|
n1 |
n2 |
n3 |
n4 |
n5 |
n6 |
n7 |
n8 |
n9 |
|
ntt [v/p] |
6,35 |
8,95 |
12,88 |
18,15 |
25,24 |
35,57 |
50,24 |
70,79 |
101,91 |
|
ntc [v/p] |
6,3 |
9 |
12,5 |
18 |
25 |
35,5 |
50 |
71 |
100 |
|
Δn [%] |
0,79 |
-0,56 |
3 |
0,83 |
0,96 |
0,2 |
0,48 |
-0,3 |
1,91 |
|
|
n10 |
n11 |
n12 |
n13 |
n14 |
n15 |
n16 |
n17 |
n18 |
|
ntt [v/p] |
143,61 |
199,75 |
281,47 |
397,74 |
560,46 |
795,48 |
1120,9 |
1591 |
2241,82 |
|
ntc [v/p] |
140 |
200 |
280 |
400 |
560 |
800 |
1120 |
1600 |
2240 |
|
Δn [%] |
2,6 |
-0,13 |
0,53 |
-0,57 |
0,08 |
-0,57 |
0,08 |
-0,56 |
0,08 |
Qua bảng trên ta thấy sai số nằm trong phạm vi cho phép nên ta chấp nhận những thông số trên.
7.3. Đồ thị sai số vòng quay:
II. TÍNH TOÁN ĐỘNG HỌC:
1. Bảng tóm tắt các thông số:
|
Thông số |
Động cơ |
I |
II |
III |
IV |
V |
||||
|
i |
iđ = 0,39 |
i1 = 2,8 |
i3 = 2,8 |
i5 = 2,8 |
i8 = 3,95 |
|||||
|
n (v/p) |
1450 |
565,5 |
203,6 |
73,3 |
26,4 |
6,6 |
||||
|
N (kW) |
1,6 |
1,5 |
1,45 |
1,4 |
1,35 |
1,3 |
||||
|
Mx(N.mm) |
10537,9 |
25331,56 |
68013,3 |
182401 |
488352,3 |
1881060 |
||||
*Hiệu suất chung : h = hđ .h5ổ .h4br = 0,94.0,9955.0,974 = 0,8
với: hđ = 0,94; hổ = 0,995; hbr = 0,97
Nct = N.h = 2.0,8 = 1,6 kW
NI = Nct.hđ .h ổ = 1,6.0,94.0,995 = 1,5 kW.
NII = NI.hbr3.h ổ = 1,5.0,97.0,995 = 1,45 kW.
NIII = NII.hbr3 .h ổ = 1,45.0,97 .0,995 = 1,4 kW.
NIV = NIII.hbr3.h ổ = 1,4.0,97.0,995 = 1,35 kW.
NV = NIV.hbr3.h ổ = 1,35.0,97.0,995 = 1,3 kW.
Tính Momen xoắn theo công thức: Mx = 9,55.106. (N.mm).
2. Thiết kế các bộ truyền:
2.1. Thiết kế bộ truyền đai:
- Chọn loại đai. Giả thiết vận tốc của đai v > 5 m/s, ta có thể dùng đai loại A hoặc B bảng (5-13) [1]. Ta tính theo cả hai phương án nào có lợi hơn :
Tiết diện đai: A B
Kích thước tiết diện đai a x h (mm) bảng 5-11 13 x 8 17 x 10,5
Diện tích tiết diện F (mm2 ) 81 138
- Định đường kính bánh đai nhỏ. Theo bảng (5-14) [1] lấy:
D1, mm 110 200
Chọn phương án dùng bộ truyền đai loại A có khuôn khổ nhỏ gọn hơn.
Kiểm nghiệm vận tốc của đai:
m/s
v < vmax = (30÷35) m/s
- Tính đường kính D2 của bánh lớn:
(mm)
Lấy D2 theo tiêu chuẩn (bảng 5-15): D2 = 280 mm
Số vòng quay thực của bánh bị dẫn nđ:
nđ = (1- 0,02).1450.(v/p)
Tỉ số truyền iđ =
- Chọn sơ bộ khoảng cách trục A theo bảng 5-16
A = D2 = 280 mm
- Tính chiều dài đai L theo khoảng cách trục A sơ bộ [công thức 5-1]
L = 2A + mm
Lấy L theo tiêu chuẩn, mm (bảng 5-12) ta lấy: L = 1200 mm.
- Xác định chính xác khoảng cách trục A theo chiều dài đai lấy theo tiêu chuẩn [công thức (5-12)]



