ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử MÔ HÌNH LƯU KHO CẢI TIẾN MODULE LƯU KHO

NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử MÔ HÌNH LƯU KHO CẢI TIẾN MODULE LƯU KHO
TÊN ĐỀ TÀI: MÔ HÌNH LƯU KHO MODULE LƯU KHO
NỘI DUNG YÊU CẦU CỦA ĐỀ TÀI :
- Cơ khí:
+ Thiết kế mô hình lưu kho truyền động bằng vitme thanh dẫn hướng.
+ Thiết kế hệ dẫn hướng gắp phôi.
+ Truyền động qua động cơ bước
- Điện tử:
+ Thiết kế hệ mạch công suất .
+ Thiết kế mạch
+ Sử dụng VDK PIC
- Lập trình:
+ Ngôn ngữ lập trình CCS.
+ Giải thuật điều khiển của hệ thống.
- Mục tiêu đề tài:
+ Vân hành mô hình tự động.
+ Gắp phôi để đúng vị trí.
+ Hướng dẫn vận hành
+ Nếu hoàn thành tốt và còn thời gian thì sẽ phát triển ứng dụng thuật toán tìm vị trí còn trống tiếp theo gần nhất để tiết kiệm thời gian lưu kho.
Hướng dẫn vận hành mô hình.
1.Nguyên tắc hoạt động.
Khi ấn start , chip sẽ kiểm tra nếu có phôi ở đầu băng tải và tất cả kho trống sẽ lưu theo thứ tự từ kho 1 đến 9, nếu có kho đã lưu rồi sẽ kiểm tra kho nào trống thì lưu vào .Nếu kiểm tra toàn bộ kho đã lưu rồi thì chip sẽ chuyển sang chương trình lấy ra và lấy theo thứ tự từ kho 9 đến kho 1.Nếu đã có kho lấy rồi thì kiểm tra kho nào có phôi sẽ lấy.
2.Cách vận hành mô hình.
Cấp nguồn ( đèn nguồn báo) Bật công tắc nguồn Nhấn start Mô hình sẽ vận hành theo nguyên tắc trên.
LỜI GIỚI THIỆU
----------0O0----------
Nước ta đang trong công cuộc công nghiệp hóa hiện đai hóa đất nước để từng bước bắt kịp sự phát triển của các nước trong khu vực Đông Nam Á và thế giới về mọi mặt. Trong đó, ngành công nghiệp hóa đóng vai trò quan trọng trong việt phát triển kinh tế. Vì vậy, vấn đề tự động điều khiển được đặt lên hàng đầu trong quá trình nghiên cứu cũng như ứng dụng công nghệ mới trong sản xuất. Vì thế, nó đòi hỏi khả năng xử lý, mức độ hoàn hảo, sự chính xác cuả hệ thống sản xuất ngày một cao hơn để có thể đáp ứng được nhu cầu về số lượng, chất lượng, thẩm mỹ ngày càng cao của xã hội. Như chúng ta đã biết trong điều kiện khoa học kỹ thuật và kinh tế phát triển như hiện nay thì quy trình tự động hóa trong công nghiệp và sản xuất hầu như không thể thiếu được. Nó đóng một vai trò hết sức quan trọng trong việc giúp tăng năng xuất, tăng độ chính xác và do đó tăng hiệu quả sản xuất. Việc sử dụng sức người cũng là một hạn chế cho việc tăng năng suất cho sản xuất. Nên chúng em đã quyết định thực hiện một mô hình để thử nghiệm tạo cách để làm giảm bớt sức lao động cho con người , một phần cũng làm giảm tai nạn lao động. Do vậy đồ án “Mô hình lưu kho” đã được chúng em nghĩ tới và quyết định thực hiện nó
Do thời gian và kiến thức có giới hạn nên không tránh khỏi những sai sót, rất mong được sự quan tâm và đóng góp ý kiến của quý thầy cô, chúng em xin chân thành cảm ơn.
Mục Lục
I. CHƯƠNG I: GIỚI THIỆU CHUNG VỀ MÔ HÌNH LƯU KHO.. - 12 -
1.Đặt vấn đề. - 12 -
2.Nguyên nhân và sự ra đời của mô hình lưu kho. - 12 -
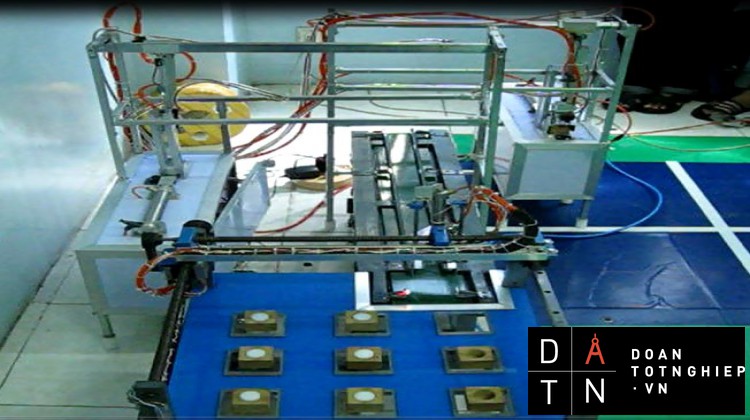
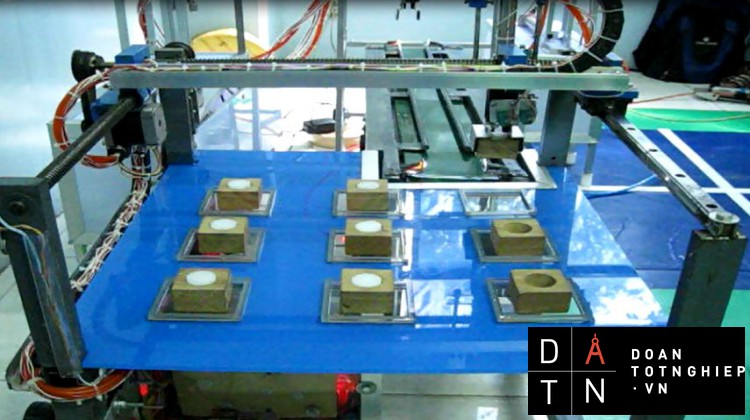
3.Giới thiệu về mô hình lưu kho. - 13 -
CHƯƠNG II : TỔNG QUAN VỀ PHẦN CƠ KHÍ - 14 -
1.Mô hình. - 14 -
Phần đế. - 15 -
2.Cơ cấu mô hình vận chuyển. - 16 -
3.Cơ cấu mô hình dẩn hướng và gắp phôi. - 17 -
4.Đai ốc 1 ,đai ốc 2 của trục OY,OX.. - 18 -
5. Động cơ, Bánh răng, Đai,Bạc đạn. - 20 -
5.1 Động cơ. - 20 -
5.2Bánh răng, Bạc đạn, Đai. - 21 -
6. Cơ cấu tay gấp. - 23 -
7. Thanh trượt - 24 -
8. Vitme. - 24 -
9. Xylanh piston. - 25 -
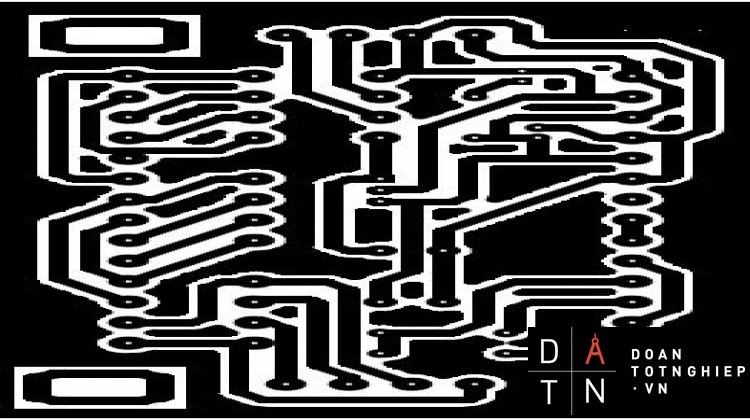
CHƯƠNG III: CÁC MẠCH ĐIỆN TỬ.. - 27 -
1.Mạch điều khiển động cơ bước. - 27 -
Một số đăc tính kĩ thuật của tip 122. - 28 -
2. Mạch relay điều khiển van solennoi - 29 -
3.Mạch nguồn . - 30 -
4.Mạch hành trình. 31
CHƯƠNG IV: GIỚI THIỆU ĐỘNG CƠ BƯỚC ĐƠN CỰC.. 32
CHƯƠNG V: CHƯƠNG TRÌNH ĐIỀU KHIỂN VÀ VẬN HÀNH MÔ HÌNH.. 33
Chương trình điều khiển. 33
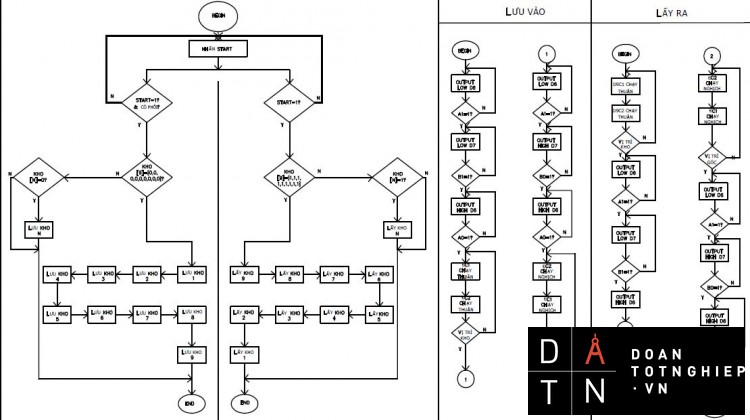
Lưu đồ giải thuật. 33
Chương trình chính: 33
Chương trình con: 34
Lưu vào Lấy ra. 34
Hướng dẫn vận hành mô hình. 35
1.Nguyên tắc hoạt động. 35
2.Cách vận hành mô hình. 35
CHƯƠNG VI: NHẬN XÉT VÀ KẾT LUẬN.. 36
Nhận xét 36
1. Tự đánh giá. 36
2. Kết quả đạt được. 36
3. Nhược điểm. 36
Hướng phát triển. 36
1.Về phần cơ khí. 36
2. Về phần giải thuật lập trình. 37
Kết luận. 37
DANH MỤC HÌNH VẼ
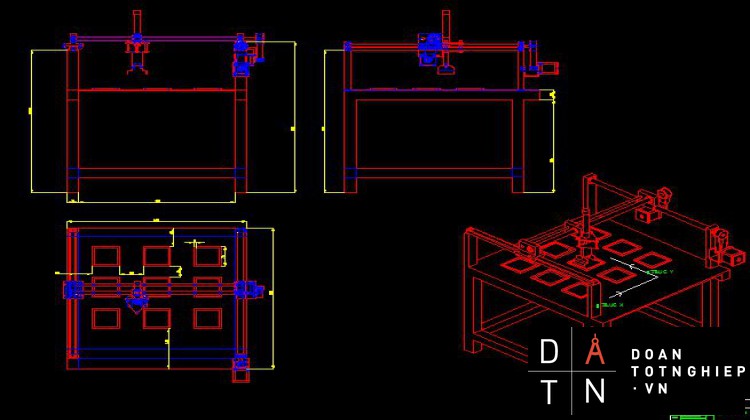
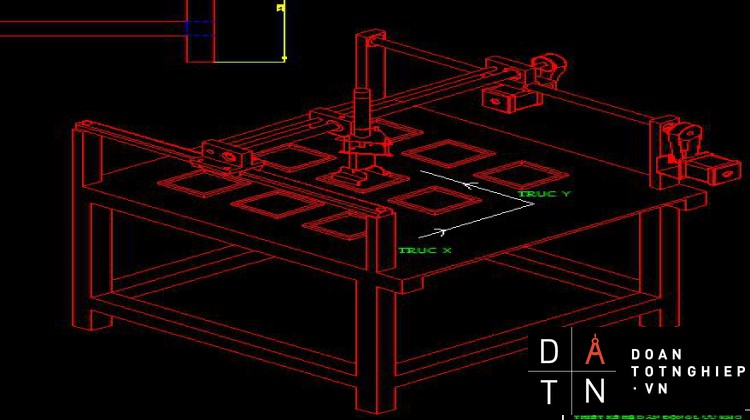
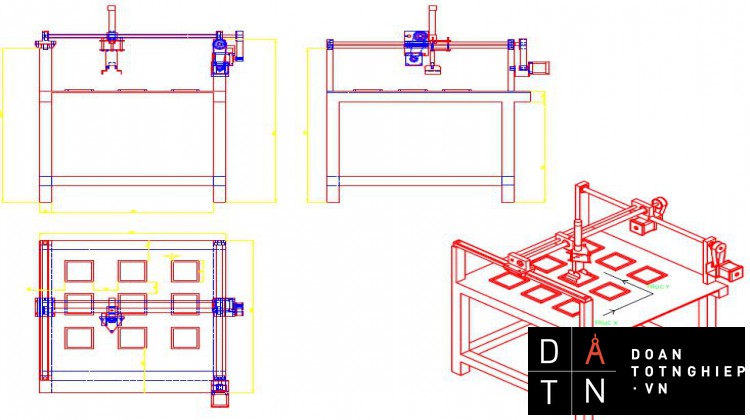
Hình 2.1: mô hình tổng quát 14
Hình 2.2:bản vẽ hình chiếu phần đế 15
Hình 2.3:cơ cấu vận chuyển 16
Hình 2.4: bản vẽ hình chiếu cơ cấu robot cất và lấy hàng 17
Hình 2.5 vẽ hình chiếu đai ốc 1của vitme truc OY 18
Hình 2.6 vẽ hình chiếu đai ốc 2của vitme truc OX 19
Hình 2.7: Hình chiếu tổng quát động cơ bước 20
Hình 2.8: Bánh răng truyền động đai 21
Hình 2.9: hình chiếu bạc đạn 22
Hình 2.10: Dây đai 22
Hình 2.11: Cấu trúc của piston tay kẹp 23
Hình 2.12: van solenoid 23
Hình 2.13: Bản vẽ hình chiếu cơ cấu thanh trượt 24
Hình 2.14: Trục vitme 25
Hình 2.15: xylanh piston 25
CHƯƠNG I: GIỚI THIỆU CHUNG VỀ MÔ HÌNH LƯU KHO
1.Đặt vấn đề
Ngày nay cùng với sự phát triển của các ngành khoa học kỹ thuật, kỹ thuật
điện tử mà trong đó điều khiển tự động đóng vai trò hết sức quan trọng trong mọi lĩnh vực khoa học kỹ thuật, quản lí, công nghiệp tự động hóa, cung cấp thong tin…. do đó chúng ta phải nắm bắt và vận dụng nó một cách có hiệu quả nhằm góp phần vào sự phát triển nền khoa học kỹ thuật thế giới nói chung và trong sự phát triển kỹ thuật điều khiển tự động nói riêng. Xuất phát từ những đợt đi thực tập tốt nghiệp tại nhà máy, các khu công nghiệp và tham quan các doanh nghiệp sản xuất, chúng em đã được thấy nhiều khâu được tự động hóa trong quá trình sản xuất. Từ những điều đã được nhìn thấy trong thực tế cuộc sống và những kiến thức mà em đã học được ở trường muốn tạo ra hiệu suất lao động lên gấp nhiều lần, đồng thời vẫn đảm bảo được độ chính xác cao về vị trí .Nên chúng em đã quyết định thiết kế và thi công một mô hình lưu kho tự động, điều này rất quan trọng bởi nó giúp cho chúng ta giảm bớt phần nào sức lao động và giảm bớt tai nạn lao động khi làm việc. Góp phần giúp ích cho xã hội và đất nước ta phát triển.
2.Nguyên nhân và sự ra đời của mô hình lưu kho.
Trước sự hội nhập của nền kinh tế thế giới, nền công nghiệp nước ta nói riêng và các nước trên thế giới nói chung đang trong thời kỳ phát triển mạnh mẽ. Nước ta đã và đang xuất hiện nhiều doanh nghiệp đầu tư trong nước và ngoài nước, không chỉ về mặt kinh tế, nền công nghiệp nước ta đang dần được cải thiện về quy mô lẫn công nghệ, nhiều công ty xí nghiệp, nhà máy, khu công nghiệp đã và đang hình thành. Đi kèm với sự phát triển ấy, số lượng sản phẩm, hàng hóa công nghiệp được tăng nhanh.Để đáp ứng được nhu cầu lưu kho, xuất kho một cách khoa học thì đòi hỏi người công nhân phải thực hiện công việc của mình với một tốc độ cao và chính xác, không chỉ vậy độ an toàn lao động của những người công nhân luôn được quan tâm. Để cải thiện được điều này, ở nhiều khu công nghiệp, công ty, nhà máy trên thế giới đã phát minh ra nhiều bộ phận máy móc, robot dùng để vận chuyển hàng hóa, sản phẩm một cách khoa học nhất.
Ở Việt Nam, công nghệ này vẫn còn đang hạn chế, vẫn chưa được sử dụng nhiều ở các khu công nghiệp, nhà máy. Chính vì vậy, với sự giúp đỡ của thầy cô trong bộ môn, nhóm chúng em đã tìm hiểu và xây dựng một mô hình “ Lưu Kho Tự Động ”.
3.Giới thiệu về mô hình lưu kho.
Mô hình hoạt động dựa trên sự chuyển động của cơ cấu robot theo các trục Ox, Oy, trên các trục vítme với sự truyền động của các động cơ bước, bánh răng và đai, và sự di chuyển lên xuống của xylanh piston theo phương Oz dưới sự điều khiển của PIC16F877A thông qua mạch động cơ, tín hiệu cảm biến và công tắc hành trình.
CHƯƠNG II : TỔNG QUAN VỀ PHẦN CƠ KHÍ
1.Mô hình
...................................................
.2 Van 5/2 sử dụng một solenoid...Hình 2.12: Van solenoid
Ứng dụng của van 5/2 một solenoid trong hệ thống “Trạm lưu kho tự động” như sau: Van solenoid 5/2 một cuộn dây được sử dụng để điều khiển thiết bị khí nén, điển hình trong mô hình này thì van 5/2 một solenoid điều khiển piston một ống và tay kẹp.
7 Thanh trượt
Hình 2.13: Bản vẽ hình chiếu cơ cấu thanh trượt
Cơ cấu được thiết kế bằng sắt.
Truyền động dẫn hướng.
Yêu cầu kỹ thuật: phải chắc chắn, linh hoạt, dể dàng chuyển động.
8 Vitme
Bộ truyền vitme – đai ốc làm việc theo nguyên lý ăn khớp của cặp ren ( giữa ren trong trên đai ốc với ren ngoài trên vitme) để biến đổi chuyển động quay thành chuyển động tịnh tiến.
Ưu điểm: Kết cấu đơn giản , nhỏ gọn và dễ chế tạo , khả năng tải lớn , có thể chuyển động chậm với độ chính xác cao.
Nhược điểm: Do ma sát lớn nên ren mòn nhanh.
Hình 2.14: Trục vitme
9 Xylanh piston
Trong mô hình lưu kho này, xylanh piston cũng đóng một vai trò rất quan trọng ảnh hưởng trực tiếp đến hoạt động của mô hình. Xylanh piston kết hợp cùng với tay gấp tạo thành một cơ cấu gấp hàng tự động .
Hình 2.15: Xylanh piston
BÀI HỌC KINH NGHIỆM THIẾT KẾ THI CÔNG CƠ KHÍ
- Khi mua vitme phải kiểm tra vitme kỹ xem vitme có bị cong vênh hay không. Vitme ngoài thị trường đa số có bước ren từ 4mm trở lên, ít có những trục vitme từ 4mm trở xuống.
- Tính toán kỹ lưỡng trước khi mua vitme phải mua bạc đạn phù hợp trước. Tránh trường hợp khi mua vitme hoặc đã đem vitme đi tiện xong mà không tìm được bạc đạn phù hợp.
- Tìm hiểu bánh răng,dây đai kỹ càng trước khi tiện vitme để tránh trường hợp khó tìm được bánh răng phù hợp.
- Đo đạc tính toàn kỹ các chiều cao của khung, thanh sắt để làm cân bằng chiều cao giữa trục vitme với thanh trượt nếu chiều cao bi chênh lệch thì tay gấp sẽ bi nghiêng.
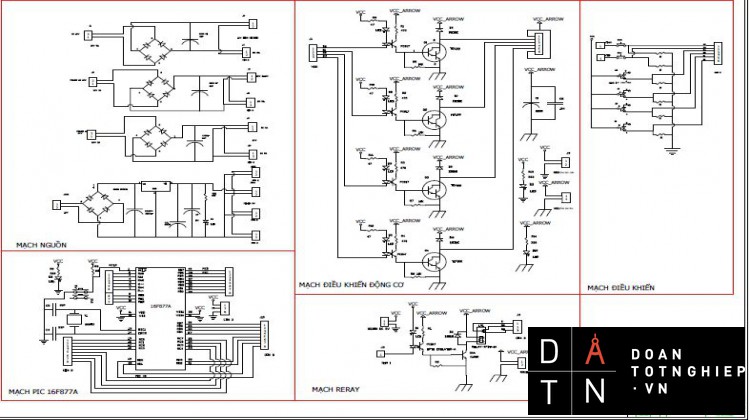
CHƯƠNG III: CÁC MẠCH ĐIỆN TỬ
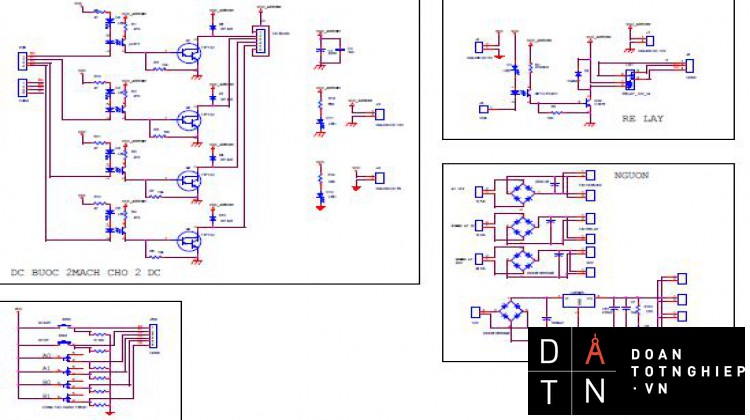
1.Mạch điều khiển động cơ bước
Sử dụng OPTO PC817 và TIP122.
OPTO PC817 : Dùng cách ly điều khiển giữa hai tầng mạch điện khác nhau ,khi ta cấp 5V vào chân số 1, LED phía trong Opto nối giữa chân số 1 và 2 sáng, xảy ra hiệu ứng quang điện dẫn đến 3 - 4 thông, khi có sự cố xãy ra như cháy, chập, tăng áp,...thì cũng không làm ảnh hưởng đến tầng điều khiển.
........................
Một số đăc tính kĩ thuật của tip 122...................................
122 : Với dòng vào cực B có thể đạt khoảng 120 mA , dòng Ic khoảng 5 ampe đến 8 ampe.
Nhưng trên thực tế ta măc tip 122 với opto PC 817 để dòng vào cực B nhỏ hơn 120 mA thì ta sẽ mắc đầu vào với 1 điện trở R= 470 ohm.
........................
2. Mạch relay điều khiển van solennoi
Mạch này có chức năng điều khiển 2 van solenoid chay piston lên xuống và gấp phôi. Bao gồm 2 mạch , 1 mạch điều khiển piston lên xuống , 1 mạch điều khiển piston gấp phôi.
3.Mạch nguồn .................
4.Mạch hành trình
...........................................
CHƯƠNG IV: GIỚI THIỆU ĐỘNG CƠ BƯỚC ĐƠN CỰC
1. Động cơ bước đơn cực
Động cơ bước đơn cực
Động cơ bước đơn cực ( hình 5) Khi sử dụng, các đầu nối trung tâm (1, 2)được nối lên đầu dương của nguồn cấp, còn 2 đầu còn lại của mỗi mấu lần lượt được nối đất để đảo chiều từ trường tạo bởi cuộn đó.
Mấu 1 nằm ở cực trên và dưới của stator, còn mấu 2 nằm ở hai cực bên phải và bên trái động cơ. Rotor là một nam châm vĩnh cửu với 6 cực, 3 Nam và 3 Bắc, xếp xen kẽ trên một vòng tròn. Để xử lý góc bước ở mức độ cao hơn, rotor phải có nhiều cực đối xứng hơn. Động cơ bước được dùng là động cơ nam châm vĩnh cửu với mỗi bước là 1.8 độ.
CHƯƠNG V: CHƯƠNG TRÌNH ĐIỀU KHIỂN VÀ VẬN HÀNH MÔ HÌNH
Chương trình điều khiển.
Lưu đồ giải thuật.
Chương trình chính:........................
.....................................................
Hướng dẫn vận hành mô hình.
1.Nguyên tắc hoạt động.
Khi ấn start , chip sẽ kiểm tra toàn bộ kho nếu tất cả kho trống sẽ lưu theo thứ tự từ kho 1 đến 9, nếu có kho đã lưu rồi sẽ kiểm tra kho nào trống thì lưu vào .Nếu kiểm tra toàn bộ kho đã lưu rồi thì chip sẽ chuyển sang chương trình lấy ra và lấy theo thứ tự từ kho 9 đến kho 1.Nếu đã có kho lấy rồi thì kiểm tra kho nào có phôi sẽ lấy.
2.Cách vận hành mô hình.Cấp nguồn ( đèn nguồn báo) Bật công tắc nguồn Nhấn start Mô hình sẽ vận hành theo nguyên tắc trên.
CHƯƠNG VI: NHẬN XÉT VÀ KẾT LUẬN
Nhận xét
1. Tự đánh giá.
Trong quá trình thực hiện đề tài nhóm còn gặp nhiều khó khăn do chưa quen với linh kiện thực tế, kiến thức và thời gian có hạn nên mô hình không được như mong muốn, nhưng sau khi thực hiện đồ án này chúng em đã tích lũy được một số kinh nghiệm quý báu.
2. Kết quả đạt được.
Có thêm kinh nghiệm về phân tích, thiết kế mô hình, biết sử dụng một số linh kiện điện tử và một vài phần mềm hổ trợ.
Cơ bản mô hình cũng được hoàn thành theo mục tiêu mà nhóm đặt ra.
3. Nhược điểm.
Do kiến thúc có giới hạn và chưa có kinh nghiệm nên nhóm gặp nhiều khó khăn trong việc thiết kế mô hình cơ khí.
Mô hình chưa có tính thẩm mỹ cao, còn nhiều sai sót.
Vẫn chưa đạt được khả năng tự động hết trong quá trình điều khiển.
Hướng phát triển.
1.Về phần cơ khí.
- Để mô hình hoạt động 1 cách ổn định và hiệu quả hơn, chúng ta có thể thay thế các động cơ bước được dùng trong mô hình bằng các động cơ có tốc độ cao hơn .
- Các tín hiệu công tắc hành trình ta có thể thay thế bằng các tín hiệu cảm biến hiện đại hơn và kết cấu phù hợp hơn sao cho mô hình chạy chính xác, hiệu quả.
- Có thể dùng thêm màn hình cảm ứng HMI để hiển thị và quản lí được số lượng khối hàng được đưa vào trong kho.
2. Về phần giải thuật lập trình.
- Có thể nâng cấp mô hình hoạt động thêm chế độ như: điều khiển bằng nút nhấn lưu vào bất kỳ vị trí nào mong muốn,
- Có thể chuyển hành trình lưu vào hoặc lấy ra bất kỳ lúc nào khi mô hình đang hoạt động.
Kết luận.
Qua thời gian làm hoàn thành đồ án, nhiều kinh nghiệm đã được đúc kết, kỹ năng được nâng cao, kiến thúc được củng cố, đó là những kết quả lớn nhất mà mỗi thành viên trong nhóm đều có được trong quá trình làm đồ án.
Dù đã cố gắng hết sức nhưng đồ án của chúng em còn nhiều hạn chế, mong được sự góp ý,chỉ bảo của quý thầy cô trong bộ môn, giúp chúng em có thêm kiến thức sau khi ra trường,phát triển đồ án có thể áp dụng được trong thực tế, phục vụ cho quá trình công nghiệp hóa,hiện đại hóa góp phần phát triển đất nước.











