ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN TỬ TÍNH TOÁN, THIẾT KẾ MÁY ĐO 3D HÌNH DÁNG CƠ THỂ NGƯỜI
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN TỬ TÍNH TOÁN, THIẾT KẾ MÁY ĐO 3D HÌNH DÁNG CƠ THỂ NGƯỜI
|
BỘ GIÁO DỤC VÀ ĐÀO TẠO TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI |
CỘNG HOÀ XÃ HỘI CHỦ NGHÍA VIỆT NAM Độc lập – Tự do – Hạnh phúc |
NHIỆM VỤ
THIẾT KẾ ĐỒ ÁN TỐT NGHIỆP
Lớp : Cơ điện tử Khóa : K56
Viện : Cơ Khí
I/ ĐỀ TÀI THIẾT KẾ
Tính toán, thiết kế máy đo 3D hình dáng cơ thể người.
II/ CÁC SỐ LIỆU BAN ĐẦU
- Phạm vi đo : 500 x 500 x 1800 (mm), trọng lượng 50kg.
- Sử dụng hệ dịch chuyển động cơ bước.
III/ NỘI DUNG THUYẾT MINH VÀ TÍNH TOÁN
- Tìm hiểu về lý thuyết phương pháp đo biên dạng 3D bằng ánh sáng cấu trúc.
- Thiết kế nguyên lý và tính toán kết cấu máy.
- Thiết kế phần điều khiển các chuyể động đo.
- Tìm hiểu sử dụng phần mềm sử lý tín hiệu đo.
IV/ CÁC BẢN VẼ VÀ ĐỒ THỊ
- Các bản vẽ tìm hiểu lý thuyết và nguyên lý.
- Bản vẽ kết cấu cơ khí.
- Bản vẽ nguyên lý và sơ đồ mạch điện.
Các kết quả chính đã đạt được của đồ án:
- Tính toán, thiết kế, chế tạo hệ cơ khí cho máy quét 3D gồm bàn quay và cụm dịch chuyển đầu đo.
- Xây dựng chương trình điều khiển động cơ bước dịch chuyển đầu đo và quay bàn quay để đảm bảo quét toàn bộ cơ thể người.
- Tìm hiểu, nắm được và sử dụng thuật toán ghép hình và hiệu chuẩn hệ thống cảm biến.
- Bước đầu xử lý dữ liệu quét 3D thành dữ liệu hình dáng 3D cơ thể người hoàn chỉnh.
Trong quá trình làm đồ án, các sinh viên Đặng Huy Dương, Nguyễn Đại Mã Lập Phong và Lăng Văn Minh đã có nhiều cố gắng học hỏi, làm việc chăm chỉ và tích cực. Nội dung đồ án thực hiện đầy đủ các nhiệm vụ được giao. Các bản vẽ đúng quy định. Kết quả nghiên cứu của đề tài đã đạt được giải nhì sinh viên nghiên cứu khoa học trường Đại học Bách Khoa Hà Nội lần 33 năm học 2015-2016.
Giáo viên hướng dẫn đánh giá các sinh viên trên đã hoàn thành tốt đề tài tốt nghiệp được giao và đề nghị được phép bảo vệ trước hội đồng chấm tốt nghiệp.
MỤC LỤC
DẠNH MỤC HÌNH ẢNH VÀ BẢNG BIỂU.. 6
LỜI NÓI ĐẦU.. 10
CHƯƠNG 1: TỔNG QUAN CHUNG VỀ THIẾT BỊ ĐO SỬ DỤNG ÁNH SÁNG CẤU TRÚC.. 11
1.1.Phương pháp đo biên dạng 3D sử dụng ánh sáng cấu trúc. 11
1.1.1.Mục đích đo biên dạng 3D hình dạng cơ thể người11
1.1.2.Một số thiết bị quét 3D điển hình hiện nay.13
1.2.Phương pháp đo bằng ánh sáng cấu trúc. 17
1.2.1.Phương pháp đo lường biên dạng 3D bằng ánh sáng cấu trúc. 17
1.2.2.Các dạng ánh sáng cấu trúc sử dụng trong đo lường biên dạng 3D.. 20
CHƯƠNG 2 : TÍNH TOÁN THIẾT KẾ MÁY QUÉT 3D.. 32
2.1.Nguyên lý của thiết bị32
2.2.Phương pháp mã hóa Gray. 34
2.3.Lựa chọn hệ thống camera và máy chiếu. 42
2.4.Tính toán, thiết kế hệ cơ khí52
2.5.Thiết kế mạch điện điều khiển. 52
CHƯƠNG 3: KẾT QUẢ THỰC NGHIỆM... 96
3.1.Hiệu chuẩn hệ thống. 96
3.2.Các ảnh hưởng đến độ chính xác của kết quả quét104
3.3.Ghép vật sử dụng thuật toán ICP (Interative Closest Point). 105
3.4.Kết quả thực nghiệm.. 110
CHƯƠNG 4: KẾT LUẬN.. 114
4.1.Kết quả đạt được. 114
4.2.Hướng phát triển. 114
TÀI LIỆU THAM KHẢO.. 115
DẠNH MỤC HÌNH ẢNH VÀ BẢNG BIỂU
Hình 1.1. Sự phát triển của các thế hệ máy quét13
Hình 1.2. Máy đo tiếp xúc CMM... 14
Hình 1.3. Tay máy đo. 15
Hình 1.4. Một số ứng dụng của thiết bị quét thế hệ 3. 15
Hình 1. 5. Máy đo các kích thước cơ thế người sử dụng laser. 16
Hình 1.6. Máy quét 3D sử dụng ánh sáng cấu trúc của hãng Artec Shapify Booth. 16
Hình 1.7. Máy quét 3D cơ thể người VITUS. 17
Hình 1.8. Phương pháp đo biên dạng 3D bằng ánh sáng cấu trúc.18
Hình 1.9. Xác định độ cao điểm đo. 19
Hình 1.10. Hình ảnh phân loại các dạng ánh sáng cấu trúc đã được nghiên cứu. 20
Hình 1.11. Mẫu mã hóa nhị phân. 21
Hình 1.12. Mã hóa cấp độ xám cho hình ảnh 3D với N= 3, M= 3 mô hình tối ưu hóa trong không gian Hilbert22
Hình 1.13. Phương pháp dịch pha. 23
Hình 1.14 . Kết hợp chiếu mã hóa Gray với phương pháp dịch pha.24
Hình 1.15. Phương pháp trắc quang xác định bề mặt 3D sử dụng 8 góc chiếu sáng khác nhau.24
Hình 1.16. Một số phương pháp kết hợp các dạng mẫu chiếu 1D thành mẫu chiếu 2D.25
Hình 1.17. Máy ảnh cầu vồng 3D.. 26
Hình 1.18. Mẫu chiếu tạo ra bởi kết hợp 3 màu cơ bản. 26
Hình 1.19. Đánh dấu đường bằng cách sử dụng màu sắc. 27
Hình 1.20. Mẫu chiếu có đường chiếu mã hóa gián đoạn. 27
Hình 1. 21. Mẫu chiếu các đường được đánh dấu bằng cách sử dụng lặp đi lặp lại mẫu mức xám.28
Hình 1.22. Mô tả dãy De Bruijn. 28
Hình 1.23. Mẫu chiếu sử dụng chuỗi De Bruijn (k=5, n=3). 28
Hình 1.24. Mảng 31 x 33 PRBA với kích thước subwindow 5x 2. 29
Hình 1.25. Mô hình mã nhỏ. 30
Hình 1.26. Một ví dụ về lưới màu sắc. 30
Hình 1.27. Ví dụ về mảng 2D mã đốm màu sắc. 31
Hình 2.1. Sơ đồ khối thiết bị đo…………………………………………………………..32
Hình 2.2. Sơ đồ nguyên lý máy quét 3D sử dụng ánh sáng cấu trúc. 33
Hình 2.3. Sơ đồ động của máy quét 3D.. 34
Hình 2.4. Mẫu chiếu dạng mã nhị phân.35
Hình 2.5. Mã nhị phân đơn giản. 36
Hình 2.6 .Mã nhị phân dạng Gray. 36
Hình 2.7. Mô hình camera lỗ nhỏ. 37
Hình 2.8. Sơ đồ xác định đám mây điểm đo. 38
Hình 2. 9 Phương pháp xác định đường vuông góc chung của 2 đường thẳng chéo nhau. 39
Hình 2.10. Xác định tọa độ 3D của điểm M... 40
Hình 2.11. Thuật toán giải mã phương pháp mã hóa Gray. 41
Hình 2.12. Giao diện phần mềm của máy quét 3D bằng ánh sáng cấu trúc. 42
Hình 2.13. Sơ đồ nguyên lý cấu tạo của máy chiếu LCD.. 43
Hình 2.14. (a) Sơ đồ nguyên lý cấu tạo máy chiếu DLP; (b)cấu tạo điểm ảnh trên chip DMD 45
Hình 2.15. So sánh chất lượng hình ảnh tạo ra bởi máy chiếu LCD và DLP. 45
Hình 2.16. Sơ đồ bố trí camera và máy chiếu. 49
Hình 2.17. Cách xác định kích thước cảm biến camera. 49
Hình 2.18. Thành phần camera được lựa chọn. 51
Hình 2.19. Kết cấu cụm cảm biến thiết bị đo biên dạng 3D sử dụng ánh sáng cấu trúc.52
Hình 2.20. Sơ đồ hệ thống máy quét 3D.. 52
Hình 2.21. Hệ thống dịch chuyển cụm đầu đo.53
Hình 2.22. Động cơ bước J57HB56-03. 56
Hình 2.23. Kích thước động cơ bước J57HB56-03.57
Hình 2.24. Bảng tra thông số đai59
Hình 2.25. Bảng thông số tra bề rộng đai59
Hình 2.26. Bảng tra lực vòng riêng. 61
Hình 2.27. Hình dạng của ray dẫn hướng.62
Hình 2.28. Ray thanh trượt tròn.64
Hình 2.29 . Sơ bồ bàn gá và hệ thống dẫn hướng.65
Hình 2.30. Tuổi thọ danh nghĩa.66
Hình 2.31. Bảng catalog thanh trượt tròn cuả WINCAM.67
Hình 2.32. Con trượt tròn.67
Hình 2.33. Bảng catalog con trượt tròn cuả WINCAM.68
Hình 2.34. Mô hình hệ thống bàn quay.68
Hình 2.35.Động cơ bước 8718L-08p.70
Hình 2.36 . Catalog tra động cơ bước hãng NEMA.71
Hình 2.37 . Kích thước chung.71
Hình 2.38. Thông số kĩ thuật động cơ vừa chọn.72
Hình 2.39. Bảng tra thông số đai.73
Hình 2.40. Bảng thông số đai răng.73
Hình 2.41. Bảng thông số tra bề rộng đai.73
Hình 2.42. Bảng tra modun đai răng.74
Hình 2.43. Bảng tra lực vòng riêng. 76
Hình 2.44. Cụm ổ đỡ chặn.78
Hình 2.45. Chọn ổ đỡ chặn. 79
Hình 2.46. Catalog tra ổ đỡ chặn hãng SKF. 79
Hình 2.47. Bảng xác định hệ số x và y. 80
Hình 2.48. Xác định hệ số và . 81
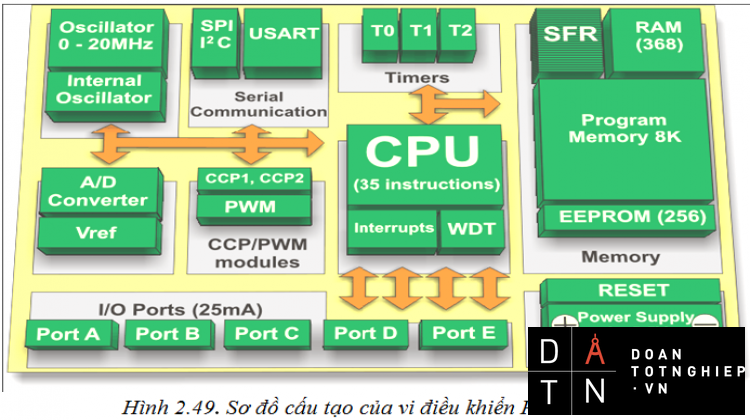
Hình 2.49. Sơ đồ cấu tạo của vi điều khiển PIC16F877A.. 82
Hình 2.50. Driver M542D.. 82
Hình 2.51. Kích thước cơ bản của driver M542D.. 83
Hình 2.52. Các chế độ chỉnh cường độ dòng điện cho động cơ. 84
Hình 2.53. Các chế độ điều khiển của Driver. 85
Hình 2.54. Sơ đồ chân Driver M542D điều khiển động cơ. 85
Hình 2.55. Sơ đồ các khối điều khiển. 86
Hình 2.56. Sơ đồ chân của DB9. 88
Hình 2.57. Mạch nguyên lý giao tiếp với máy tính. 89
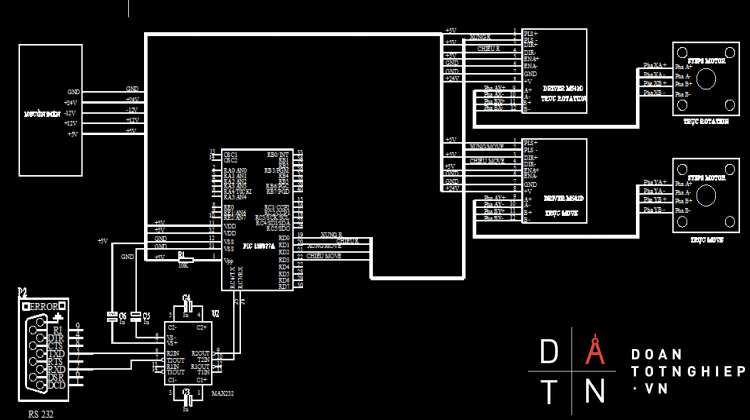
Hình 2.58. Sơ đồ mạch điện máy đo quét 3D.. 89
Hình 2.59. Hiện trạng mạch điều khiển của thiết bị90
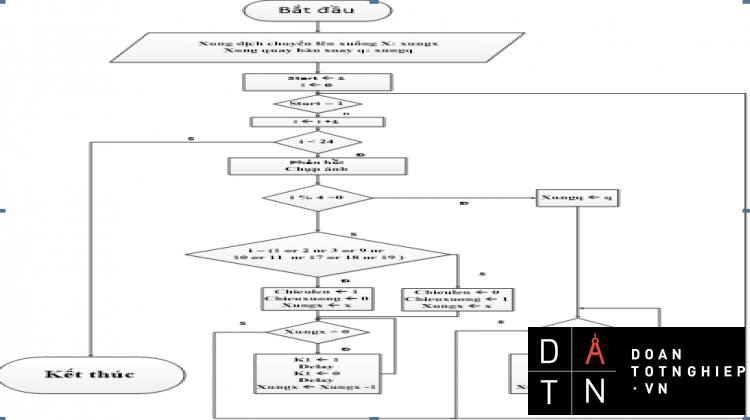
Hình 2.60. Sơ đồ thuật toán điều khiển động cơ. 92
Hình 2.61. Sơ đồ thuật toán chiếu và chụp ảnh trong quá trình quét93
Hình 2.62. Sơ đồ thuật toán điều khiển động cơ. 94
Hình 2.63. Giao diện điều khiển. 95
Hình 3.1. Sơ đồ mô hình hệ thống phát và thu ánh sáng cấu trúc………………………..96
Hình 3.2. Quy ước hệ tọa độ gốc trên ảnh của CCD và DM... 97
Hình 3.3. Nguyên lý hiệu chuẩn hệ thống ánh sáng cấu trúc. 98
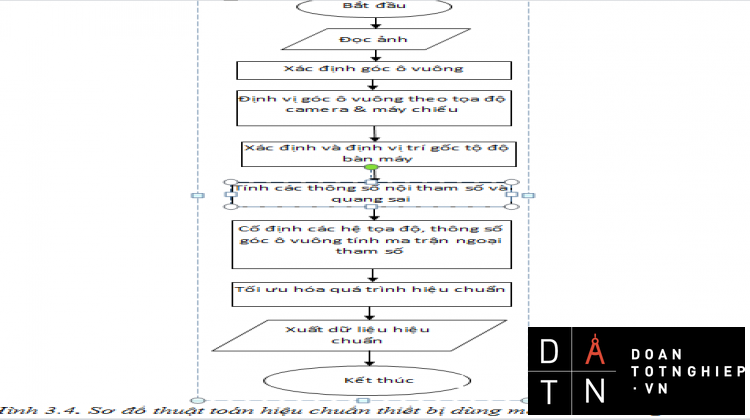
Hình 3.4. Sơ đồ thuật toán hiệu chuẩn thiết bị dùng mẫu in ô vuông bàn cờ. 101
Hình 3.5. Giao diện phần mềm chương trình hiệu chuẩn thiết bị102
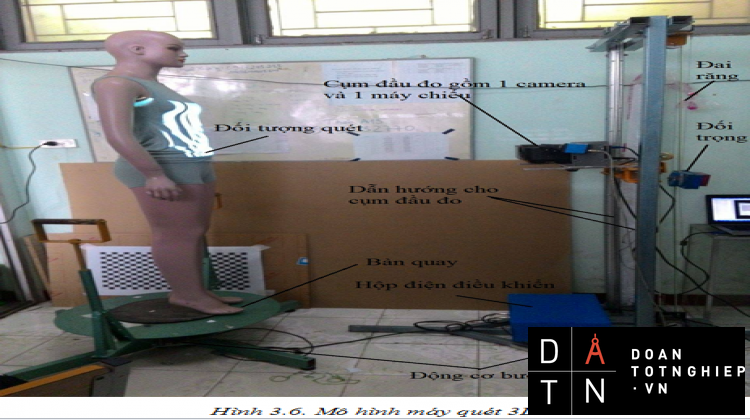
Hình 3.6. Mô hình máy quét 3D.. 110
Hình 3.7. Mô hình sau khi xử lý số liệu và ghép hình. 111
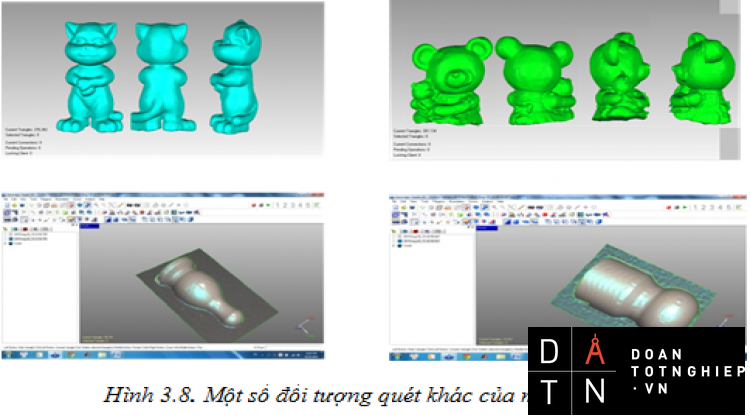
Hình 3.8. Một số đối tượng quét khác của máy quét 3D.. 112
Hình 3.9. Các lần đo kích thước vòng ngực. 112
Hình 3.10. Các lần đo kích thước vòng eo. 113
Hình 3.11. Các lần đo kích thước vòng mông. 113
Bảng 2.1.Thông số kĩ thuật máy chiếu sử dụng trong thiết bị…………………………...47
Bảng 2.2. Thông số kĩ thuật camera sử dụng trong thiết bị48
Bảng 2.3. Thông số kĩ thuật định dạng cảm biến hình ảnh. 50
Bảng 2.4. Thông số kĩ thuật một số ống kính. 50
Bảng 2. 5: Tiêu chuẩn chọn vòng đệm cho ông kính camera. 51
Bảng 2.6: Đặc tính một số loại động cơ bước dùng trong công nghiệp. 56
Bảng 2.7: Đặc tính một số loại động cơ bước dùng trong công nghiệp. 71
Bảng 2.8. Bảng thông số Driver M542D.. 84
Bảng 2.9. Các chân của RS232. 87
Bảng 2.10. Thực nghiệm vùng chiếu. 91
Bảng 3.1. Các thông số Calib cụm đầu đo…………………………………………………103
LỜI NÓI ĐẦU
Trong những năm gần đây, chất lượng cuộc sống người dân Việt Nam ngày càng được cải thiện. Điều này dẫn đến nhu cầu đối với các sản phẩm may mặc và thời trang tăng cao. Để hỗ trợ cho việc thiết kế được nhanh hơn, các thiết bị công nghệ hiện đại đã được sử dụng nhiều hơn trong ngành may mặc và thời trang. Một trong các thiết bị được sử dụng rộng rãi là hệ thống đo lường 3D các kích thước của cơ thể người. Hiện nay, giá thành của các thiết bị này là rất cao và chưa phù hợp để ứng dụng vào sản xuất tại Việt Nam. Vì vậy, mục đích của nhóm nghiên cứu là thiết kế và chế tạo máy đo quét 3D và xây dựng thuật toán để tính toán các kích thước của cơ thể người từ dữ liệu thu được với giá thành hợp lý hơn trong sản xuất tại Việt Nam.
Nội dung chính của đề tài bao gồm: tính toán thiết kế chế tạo cơ cấu quay bàn quay và hệ thống cơ khí dịch chuyển đầu đo, lựa chọn tích hợp hệ đầu đo gồm 1 máy chiếu và 1 camera. Thiết kế mạch điện và xây dựng chương trình điều khiển động cơ bước quay bàn quay và chuyển động tịnh tiến của đầu đo lên xuống dọc theo cơ thể người sử dụng vi điều khiển PIC16F877A kết nối máy tính thông qua cổng RS232. Tìm hiểu và ứng dụng thuật toán dựng hình dưới dạng đám mây điểm và xử lý ghép hình dữ liệu quét.
Đề tài đã xây dựng được thiết bị quét 3D với kích thước vùng làm việc 500x500x1800 mm3 dùng để đo toàn bộ cơ thể người. Các dữ liệu quét được xử lý trên phần mềm Geomagic Studio 2012 để có thể đạt được mô hình ba chiều của cơ thể người dưới dạng đám mây điểm. Dữ liệu đám mây điểm này có thể được đưa vào các phần mềm xử lý để xác định các thông số kích thước cơ thể người. Việc xác định thông số cơ thể con người từ đám mây dữ liệu quét 3D tốn ít thời gian hơn với đo nhân trắc truyền thống, cung cấp nhiều giá trị hơn, chính xác, tiết kiệm thời gian và sức lao động. Độ phân giải đám mây điểm dữ liệu quét đạt được 0.5mm.
CHƯƠNG 1: TỔNG QUAN CHUNG VỀ THIẾT BỊ ĐO SỬ DỤNG ÁNH SÁNG CẤU TRÚC
1.1. Phương pháp đo biên dạng 3D sử dụng ánh sáng cấu trúc
1.1.1. Mục đích đo biên dạng 3D hình dạng cơ thể người
Đo biên dạng 3D của đối tượng có ý nghĩa rất lớn trong nhiều lĩnh vực của cuộc sống và các ngành khoa học kỹ thuật như: đo lường kiểm tra trực tuyến, quản lý chất lượng quá trình sản xuất, công nghệ thiết kế ngược, công nghiệp thời trang, y học, an ninh, xây dựng tái tạo các di sản văn hóa, khảo cổ.... Các thiết bị đo quét 3D cung cấp dữ liệu bề mặt biên dạng đối tượng dưới dạng đám mây điểm. Từ dữ liệu đám mây điểm thu được có thể tái tạo lại biên dạng các vật thể, từ đó có thể xác định các thông tin về hình dạng, màu sắc, kích thước, góc quan sát vật thể từ nhiều góc nhìn khác nhau…. Những thông tin thu được từ hình ảnh 3D giúp cho khả năng quan sát, nhận dạng, mô phỏng chính xác hơn.
Hai nhóm phương pháp chính đo biên dạng 3D của đối tượng là: đo tiếp xúc và không tiếp xúc. Phương pháp đo tiếp xúc sử dụng các đầu dò tiếp xúc với bề mặt đối tượng cần đo như các máy đo ba tọa độ CMM (Coordinate Measuring Machine), tay máy đo.... Đặc điểm chính của phương pháp đo tiếp xúc là phương pháp đo từng điểm, mỗi điểm được xác định khi đầu dò tiếp xúc cơ học với bề mặt cần đo đồng thời đánh dấu các tọa độ điểm đo trên hệ tọa độ máy với thời gian xác định, đối tượng quét lớn sẽ phải mất nhiều thời gian để quét. Phép đo có các sai số do kích thước đầu dò và khó đo các đối tượng hình dạng phức tạp hoặc có bề mặt không xác định và bề mặt không định hình. Giá thành các thiết bị đo tiếp xúc thường rất cao do các bộ phận cảm biến đầu dò được mang bởi các hệ thống cơ khí đòi hỏi độ chính xác cao.
Phương pháp đo không tiếp xúc sử dụng tia X, sóng siêu âm và các phương pháp sử dụng nguyên lý quang học để thu thập dữ liệu điểm đo được phân loại thành 2 dạng phương pháp chính là: phương pháp chủ động và phương pháp thụ động. Phương pháp đo không tiếp xúc bị động sử dụng các hình ảnh của vật cần đo để xác định tọa độ điểm đo gồm: phương pháp ảnh lập thể (mô phỏng lại cách quan sát của mắt người), phương pháp quang trắc, phương pháp dựa vào bóng của vật. Phương pháp đo không tiếp xúc chủ động chiếu các mẫu ánh sáng vào bề mặt đối tượng đo dựa vào sự tán xạ, phản xạ của bề mặt đối tượng để xác định điểm đo có các nguyên lý như: thời gian truyền sóng, nguyên lý tam giác lượng (đo bằng laser, ánh sáng cấu trúc). Phương pháp đo không tiếp xúc có thể đo được bề mặt các đối tượng có kích thước lớn như: các công trình kiến trúc, máy bay, tàu thủy và các đối tượng có bề mặt vô định hình. Phương pháp đo thụ động thường có tốc độ đo nhanh hơn nhưng phương pháp đo chủ động có độ chính xác cao hơn. Hầu hết các thiết bị đo sử dụng phương pháp ánh sáng cấu trúc dùng camera làm cảm biến hình ảnh với tốc độ chụp hình cao có thể đến hàng triệu ảnh trong một giây, số điểm đo tương ứng với số điểm ảnh của camera nên tốc độ đo rất nhanh, có khả năng đo quét các đối tượng trực tuyến. Ngoài ra, phương pháp đo chủ động sử dụng ánh sáng cấu trúc đạt độ chính xác cao, tốc độ đo nhanh nên được tập trung nghiên cứu ứng dụng trong nhiều lĩnh vực. Phạm vi ứng dụng của phương pháp đo sử dụng ánh sáng cấu trúc rất rộng từ việc đo đối tượng vùng kích cỡ micro trong các ngành sản xuất vi cơ, điện tử đến các đối tượng có kích thước lớn như xe bus, tàu thủy, máy bay….
Hiện nay công nghệ quét 3D không tiếp xúc bằng các phương pháp quang học đang được nghiên cứu ứng dụng nhiều trong việc đo các thông số kích thước cơ thể người. Ưu điểm của phương pháp này là đo nhanh, thuận tiện cho lấy mẫu hàng loạt.
Sự phát triển của công nghệ quét 3D có tiềm năng đáng kể trong ngành công nghiệp dệt may vì một số lý do sau: Thứ nhất công nghệ này có khả năng thu được số lượng không giới hạn các số đo tuyến tính và phi tuyến của cơ thể. Thứ hai các phép đo thu được bằng cách sử dụng công nghệ này có độ chính xác hơn và tiến hành đo những phép mà phương pháp đo truyền thống (đo bằng tay) không thực hiện được như đo diện tích bề mặt, chia cắt từng phần hoặc thể tích. Thứ ba dữ liệu đo nhận được tốt hơn và có thể được sử dụng nhiều lần, lưu trữ lâu dài, có thể sửa đổi bất cứ lúc nào. Cuối cùng công nghệ quét này cho phép thu được một định dạng kỹ thuật số có thể tích hợp vào các hệ thống khác một cách nhanh chóng.
Với hình mẫu 3D thu được có thể sử dụng được rất nhiều mục đích khác nhau như: Ứng dụng trong nghành công nghiệp may và thời trang (để may quân phục, thử trang phục ảo, khảo sát cỡ số nhân trắc, phân tích độ vừa vặn của trang phục…), mô phỏng thử các mẫu thời trang mới cho khách hàng mà khách hàng không cần trực tiếp thử sản phẩm, sản xuất phim hoạt hình và đồ họa, ứng dụng y tế…
Thiết bị quét 3D cơ thể người đã được nhiều hãng phát triển. Những máy quét khác nhau như ([TC]2, Cyberware, Human Solutions, Telmat, Hamamatsu, Wicks and Wilson…) sử dụng những máy ảnh với hình dạng kết cấu máy khác nhau, các loại nguồn sáng khác nhau để chiếu sáng vật thể, và các hệ thống máy tính khác nhau, nhưng đều được thiết kế để hiển thị hình ảnh 3D của vật thể và cho phép tách chính xác thành kích thước một, hai hay ba chiều của vật thể.
Sự phát triển của công nghệ 3D quét cơ thể cho phép khai thác nhanh chóng và nhất quán các phép đo cơ thể và có thể tạo tùy biến phù hợp cho bất kỳ số lượng người. Máy quét cơ thể với công nghệ ánh sáng cấu trúc hoặc ánh sáng trắng: chiếu một loạt các vân sáng đến cơ thể và được thu ảnh qua máy ảnh. Hình dạng 3D cơ thể được mô tả bởi sự biến dạng của các vân mẫu khi chiếu lên cơ thể người.
Với mục đích thiết kế chế tạo thiết bị đo đã xây dựng hệ thống mã hóa số đo cơ thể người cho công nghệ dệt may. Một số kết quả bước đầu đã nghiên cứu sử dụng phương pháp đo cơ thể người bằng ánh sáng cấu trúc mã hóa Gray. Ánh sáng được mã hóa Gray, chiếu bằng máy chiếu LCD và thu ảnh bằng camera full HD. Với phương pháp này dữ liệu thu được với độ sâu rõ ràng và không bị ảnh hưởng của ánh sáng môi trường xung quanh. Đặc điểm của hinh dáng cơ thế người
1.1.2. Một số thiết bị quét 3D điển hình hiện nay.
Theo lịch sử phát triển của công nghệ quét 3D các thiết bị quét phát triển theo 3 giai đoạn và tạo ra các thế hệ máy. Với mục tiêu giảm giá thành máy quét 3D và tăng khả năng đo và độ chính xác của thiết bị quét.
Hình 1.1. Sự phát triển của các thế hệ máy quét
Trên hình 1.1 thể hiện sự phát triển của các hệ máy quét 3D cũng như có sự đánh giá tương quan về giá cũng như khả năng linh động của thiết bị. Với sự phát triển của các thế hệ máy quét giá thành cấu thành lên thiết bị ngày càng giảm đi đồng thời độ linh hoạt ngày càng tăng.
Giai đoạn 1: Các thiết bị quét 3D sử dụng đầu dò tiếp xúc. Thiết bị CMM đầu tiên được nghiên cứu sản xuất từ giữa thế kỉ trước như hình 1.2. Đây là các thiết bị đo điểm có thể đạt độ chính xác 0,001 mm. Tuy nhiên, khả năng linh động kém, kích thước vật thể cần đo hạn chế, không đo kiểm được mặt đáy của vật thể trên một lần gá, đo kiểm các mặt bên không thuận lợi, kích thước máy lớn cồng kềnh và chiếm nhiều không gian lắp đặt. Do kích thước đường kính của đầu chạm cố định nên việc kiểm tra các vị trí khe rãnh bị hạn chế. Không kiểm tra được bề mặt mềm dễ biến dạng, máy và vật thể cần đo đều phải lắp cố định. Không phù hợp cho công nghệ kỹ thuật ngược.
Hình 1.2. Máy đo tiếp xúc CMM
Giai đoạn 2: Các tay máy quét 3D – Arm Scan thế hệ 2.
Các thiết bị dạng này có khả năng linh động có cải thiện hơn so với các thiết bị thế hệ 1, chuyển động đo được thực hiện trực tiếp bởi “người” tác động trực tiếp đến đầu đo nên tính cơ động cao hơn, có thể thay thế đầu chạm bằng đầu quét laser để thực hiện quét 3D bề mặt sản phẩm như hình 1.3. Tuy nhiên, do chiều dài của cánh tay robot là cố định nên kích thước vật thể cần đo vẫn còn hạn chế, không đo kiểm được mặt đáy của vật thể cần đo trên một lần gá. Do kích thước đường kính của đầu chạm là cố định nên việc kiểm tra các vị trí khe rãnh. Khả năng di chuyển của hệ thống còn nhiều hạn chế, không thuận lợi khi đo quét các vật thể có kích thước lớn.
Hình 1.3. Tay máy đo
Giai đoạn 3: Các tay máy quét Thế hệ 3: Máy đo quét 3DArm Scan
Đây là các thiết bị có khả năng di chuyển rất linh động, Có thể quét tất cả bề mặt của vật thể trên một lần gá đặt như hình 1.4 . Hệ thống phần mềm + thiết bị thân thiện, trực quan và dễ sử dụng, máy và vật thể cần quét không cần gá đặt cố định, phần mềm quản lý dữ liệu thông minh phù hợp với nhu cầu sản xuất công nghiệp. Hệ thống sử dụng tia laser hoặc ánh sáng cấu trúc có thể quét được hình dạng phức tạp. Với thiết bị sử dụng vệt laser độ chính xác khi đo mặt phẳng có kích thước 0,6m có thể đạt được 0,01 mm, với đối tượng quét có kích thước khoảng 50 mm có thể đạt tới 0,001mm.
Hình 1.4. Một số ứng dụng của thiết bị quét thế hệ 3
- Một số máy quét 3D hình dáng cơ thể người trên thế giới hiện nay.
Hình 1. 5. Máy đo các kích thước cơ thế người sử dụng laser
Hình 1.6. Máy quét 3D sử dụng ánh sáng cấu trúc của hãng Artec Shapify Booth
Hình 1.7. Máy quét 3D cơ thể người VITUS
1.2. Phương pháp đo bằng ánh sáng cấu trúc
“Ánh sáng cấu trúc là chùm tia sáng mà mỗi tia sáng được mã hóa về cường độ hoặc màu sắc.”
Mã hóa về cường độ là sự điều biến biên độ cường độ sáng theo dạng sin, tam giác, nhị phân….trong không gian chiếu. Mã hóa màu sắc là sự sắp xếp các màu trong không gian chiếu theo các quy luật định trước như: dải màu như cầu vồng, các vạch màu xen kẽ nhau….Việc mã hóa ánh sáng cấu trúc có thể sử dụng các phương pháp: giao thoa, chiếu qua cách tử hoặc dùng máy chiếu.
1.2.1. Phương pháp đo lường biên dạng 3D bằng ánh sáng cấu trúc
Phương pháp đo biên dạng 3D sử dụng ánh sáng cấu trúc mã hóa theo cường độ dựa trên nguyên lý tam giác lượng trong quang học. Với mô hình nguyên lý là biến thể của phương pháp stereo với việc thay thế một kênh nhìn bằng một thiết bị chiếu.
Hình 1.8. Phương pháp đo biên dạng 3D bằng ánh sáng cấu trúc.
Nguyên lý đo biên dạng 3D sử dụng ánh sáng cấu trúc được thể hiện trên hình 1.8. Thiết bị chiếu chiếu các ảnh mẫu 2D được thiết kế theo phương pháp mã hóa nhất định lên bề mặt đối tượng đo, biên dạng 3D của đối tượng làm biến dạng hình ảnh mẫu chiếu và được nhận biết thông qua hệ thống camera. Phân tích dữ liệu ảnh và kết hợp phương pháp mã hóa ảnh chiếu để dựng lại tọa độ đám mây điểm của đối tượng đo.
Phương pháp đo biên dạng 3D sử dụng ánh sáng cấu trúc dựa trên nguyên lý tam giác lượng trong quang học. Các mẫu ảnh chiếu 2D được thiết kế theo phương pháp mã hóa nhất định và được chiếu lên bề mặt đối tượng. Mỗi điểm ảnh được mã hóa có thể là mã hóa về màu sắc hoặc cường độ. Khi chiếu mẫu chiếu lên bề mặt đối tượng biên dạng 3D của đối tượng làm biến dạng hình ảnh mẫu chiếu và được nhận biết thông qua hệ thống camera. Phân tích dữ liệu ảnh và kết hợp phương pháp mã hóa ảnh chiếu để dựng lại tọa độ đám mây điểm của đối tượng đo. Thiết bị đo biên dạng sử dụng ánh sáng cấu trúc thông thường được cấu tạo bởi 3 bộ phận chính là: bộ phận chiếu ảnh, bộ phận thu ảnh và bộ phận xử lý thông tin.
Bộ phận chiếu ảnh: thường là máy chiếu kỹ thuật số chiếu một hoặc một số ảnh được mã hóa trước lên bề mặt đối tượng cần đo. Ảnh mã hóa rất đa dạng về cấu trúc, kích cỡ, độ phân giải. Tùy theo dạng ánh sáng cấu trúc, bộ phận chiếu có thể là hệ thống giao thoa, hệ thống chiếu hình. Với sự phát triển của khoa học công nghệ chế tạo máy chiếu các máy chiếu đã đáp ứng tốt được các yêu cầu kỹ thuật của phương pháp và giá cả phù hợp hơn với việc chế tạo một thiết bị đo.
Bộ phận chụp ảnh: là máy ảnh bộ phận này có chức năng chụp lại, ghi lại hình ảnh của mẫu chiếu được chiếu lên bề mặt cần quét. Ảnh thu được chứa đựng thông tin chiều cao của đối tượng thông qua sự biến đổi dạng, màu sắc mẫu chiếu do bề mặt biên dạng của vật cần đo mang lại. Có thể sử dụng một hay nhiều camera với các góc quan sát khác nhau nhằm tăng tốc độ cũng như độ chính xác khi đo. Các camera hiện nay cung cấp cho người sử dụng nhiều ưu điểm về độ phân giải, tốc độ chụp, chất lượng hình ảnh cũng như giá thành ngày càng giảm. Bộ phận chiếu ảnh và chụp ảnh tạo thành hệ thống cảm biến cho thiết bị quét biên dạng sử dụng ánh sáng cấu trúc.
Bộ phận xử lý thông tin đo: Chức năng bộ phận này là điều khiển quá trình chiếu chụp đồng thời kết nối máy tính xử lý dữ liệu ảnh nhằm xác định được đám mây điểm bề mặt đối tượng đo. Bộ phận này có thể là các máy tính cá nhân hoặc các thiết bị được thiết kế chuyên biệt nhằm tối ưu hóa quá trình điều khiển, xử lý thông tin và truy xuất dữ liệu đo.
Hình 1.9. Xác định độ cao điểm đo
Hình 1.9 minh họa một trường hợp xác định độ cao điểm đo khi đó điểm P trên đối tượng có thể xác định qua biểu thức.
|
(1.1) |
Trong đó:
- h là khoảng cách từ camera đến điểm đo.
- d là khoảng cách của camera và máy chiếu.
- α1 và α2 là góc tạo bởi phương nối tâm của camera và máy chiếu đối với điểm đo P.
1.2.2. Các dạng ánh sáng cấu trúc sử dụng trong đo lường biên dạng 3D
Có nhiều dạng ánh sáng cấu trúc khác nhau, có thể được cấu trúc theo hai hoặc ba phương chiếu hoặc cấu trúc theo màu sắc với mục đích mã hóa các điểm đo trong không gian chiếu để có thể xây dựng hệ lưới điểm của bề mặt vật đo.
Các dạng ánh sáng cấu trúc được phân chia theo hình vẽ:
Hình 1.10. Hình ảnh phân loại các dạng ánh sáng cấu trúc đã được nghiên cứu
- Mẫu ảnh chiếu mã hóa Nhị phân.
Mẫu chiếu nhị phân sử dụng các vân đen và trắng để tạo thành một chuỗi các mẫu chiếu. Độ phân giải của phương pháp được xác định bằng khoảng trắng hoặc đen nhỏ nhất trên mẫu chiếu. Với mẫu chiếu thứ n có 2n vân. Tọa độ 3D của một điểm được xác định bằng nguyên tắc tam giác lượng. Kỹ thuật mã hóa nhị phân rất tin cậy và ít nhạy cảm với bề mặt vật quét (vì chỉ có một giá trị nhị phân tồn tại trong tất cả các điểm ảnh). Tuy nhiên, để đạt được độ phân giải cao cần số lượng lớn các ảnh chiếu và không đo được các đối tượng theo thời gian thực.
Hình 1.11. Mẫu mã hóa nhị phân
- Mẫu chiếu cấp độ xám
Mẫu chiếu cấp độ xám được nghiên cứu để giảm số lượng mẫu chiếu so với phương pháp mã hóa nhị phân mà vẫn đo được đối tượng với độ phân giải cao hơn. Sử dụng M cấp độ mã hóa xám khác biệt về cường độ để mã hóa ảnh chiếu (thay vì chỉ có hai trong mã nhị phân). Với N mẫu có thể có MN vân. Mỗi mã vạch có thể hình dung như là một điểm trong một không gian cơ bản N chiều, và mỗi chiều có M giá trị khác nhau. Nếu N = 3, và M = 4 thì tổng số mã vân là 64 (43) tương đương 6 bit trong phương pháp nhị phân. Tuy nhiên, cần tối ưu hóa trong thiết kế các mô hình mã hóa nhị phân và mức xám để có thể phân biệt được những điểm liền kề khi chiếu lên vật cần quét. Trên hình là ví dụ khi sử dụng mã hóa xám 3 mức khi chiếu 3 ảnh có 27 vùng được xác định. Đây là phương pháp cho tốc độ cao hơn phương pháp mã hóa nhị phân tuy nhiên dễ bị ảnh hưởng bởi bề mặt vật do có thể hình thành các vùng mã hóa yếu khó xác định.
Hình 1.12. Mã hóa cấp độ xám cho hình ảnh 3D với N= 3, M= 3 mô hình tối ưu hóa trong không gian Hilbert
- Phương pháp dịch pha
Phương pháp dịch pha là phương pháp chiếu vân được biết đến nhiều nhất để thu được hình ảnh 3D của một vật thể. Một tập hợp các mẫu chiếu hình sin được chiếu lên bề mặt đối tượng (Hình 1.13 a). Trường hợp đơn giản nhất là phương pháp dịch pha 3 bước cường độ cho mỗi điểm ảnh (x, y) của vân chiếu được mô tả dưới dạng:
|
(1.1) |
|
(1.2) |
|
(1.3) |
Trong đó: I1(x,y); I2(x,y) và I3(x,y) là cường độ tại điểm (x,y) của 3 ảnh chiếu; I0(x,y) là cường độ thành phần nền, Imod(x, y) là biên độ tín hiệu điều chế, (x, y) là thành phần pha, θ là hằng số dịch pha. Gỡ bỏ pha mang unwrapping là quá trình xác định giá trị pha tuyệt đối. Có thế xác định (x, y) với phương pháp dịch pha 3 bước theo công thức:
(1.4)
(a) (b)
Hình 1.13. Phương pháp dịch pha
a)Phương pháp dịch pha với 3 bước; b)Cách xác định độ cao điểm đo
Ta thấy ’ là hàm arctg có chu kì 2π do đó để loại bỏ sự không liên tục có thể xác định theo công thức:
(1.5)
k là một số nguyên đại diện cho chu kì.
Điều đáng chú ý là phương pháp gỡ bỏ pha mang chỉ cung cấp thông tin pha tương đối của các điểm khi chiếu sáng mà không cung cấp giá trị pha tuyệt đối do đó tọa độ 3D thực tế cần phải xác định thông qua giá trị pha so với mặt phẳng tham chiếu.
Hình 1.13b minh họa một trường hợp đơn giản xác định độ cao điểm quét với
|
(1.6) |
Đơn giản hóa các mối quan hệ dẫn đến
|
(1.7) |
- Phương pháp kết hợp dịch pha và mã hóa Gray
Có hai vấn đề lớn với các kỹ thuật dịch pha: Phương pháp dịch pha chỉ cung cấp giá trị pha tương đối không cung cấp giá trị pha tuyệt đối, do đó khi có hai mặt phẳng tạo nên độ lệch pha lớn hơn 2π sẽ gây ra sự tồn tại các điểm mơ hồ. Để giải quyết vấn đề này người ta thường kết hợp giữa phương pháp dịch pha và phương pháp mã hóa xám. Hình 1.14 cho thấy một ví dụ về cách kết hợp chiếu mã hóa Gray với phương pháp dịch pha với chuỗi mã hóa 32 vân tuần tự. Các mã màu xám xác định pha tuyệt đối không có bất kỳ điểm mơ hồ, trong khi phương pháp dịch pha cung cấp độ phân giải lớn hơn từ số vân được cung cấp bởi mã Gra]. Tuy nhiên, phương pháp lại đòi hỏi một số lượng lớn ảnh chiếu và không đáp ứng được đo các đối tượng ở trạng thái động.
Hình 1.14 . Kết hợp chiếu mã hóa Gray với phương pháp dịch pha.
- Phương pháp quang trắc Photometrics
Phương pháp quang trắc được nghiên cứu đầu tiên bởi Woodham, là một phương pháp biến thể từ hình bóng. Việc xác định vùng trên bề mặt đối tượng bằng cách sử dụng một chuỗi hình ảnh của vùng trên bề mặt từ cùng góc quan sát nhưng dưới sự chiếu sáng theo các hướng khác (Hình 1.15). Như vậy phương pháp đòi hỏi phải xử lý nhiều hình ảnh khi xác định và nguồn sáng chiếu phải có tính chất của nguồn sáng điểm, khi xác định ảnh 3D cần quy ước điểm đầu cũng như điểm kết thúc để ghép các ảnh lại khi xử lý.
Hình 1.15. Phương pháp trắc quang xác định bề mặt 3D sử dụng 8 góc chiếu sáng khác nhau.
- Các phương pháp kết hợp
Để nâng cao hiệu quả của thiết bị quét 3D sử dụng ánh sáng cấu trúc có thể sử dụng các mẫu chiếu kết hợp những phương pháp kể trên. Tùy từng đối tượng cụ thể phương pháp kết hợp có thể khắc phục nhược điểm của các phương pháp riêng lẻ. Hình 1.16 thể hiện ví dụ về sự kết hợp các dạng mẫu chiếu khác nhau.
Hình 1.16. Một số phương pháp kết hợp các dạng mẫu chiếu 1D thành mẫu chiếu 2D.
- Phương pháp đo biên dạng sử dụng một ảnh chiếu
Khi sử dụng những phương pháp chiếu như trên có một nhược điểm chính là cần nhiều ảnh chiếu khác nhau, do đó rất khó xác định các vật chuyển động tốc độ cao hoặc các bộ phận sống giống như bộ phận sinh học trong cơ thể sống. Để khắc phục những nhược điểm đó, nhiều tác giả đã nghiên cứu và chế tạo ra thiết bị quét 3D chỉ cần một lần chiếu- chụp ứng dụng những thuận lợi do thông tin màu đem lại, hoặc những mã hóa đặc biệt khi chiếu một hình ảnh lên đối tương đủ để cung cấp các thông tin xác định biên dạng 3D của đối tượng.
- Mẫu chiếu cầu vồng 3D
Hình 1.17 minh họa thiết bị quét 3D cầu vồng. Không giống phương pháp quang trắc cần xác định vùng đo trong nhiều ảnh khác nhau, thiết bị quét 3D cầu vồng cho phép chiếu dải ánh sáng có màu như màu cầu vồng trên không gian chứa vật thể. Mối quan hệ hình học giữa camera cố định và quang phổ của vùng chiếu sáng tương ứng với các góc khác nhau cho ta xác định được vị trí từng điểm cần quét theo nguyên tắc tam giác lượng. Phương pháp cho tốc độ quét cao do tốc độ máy ảnh cao và một ảnh cung cấp đầy đủ thông tin 3D của không gian cần quét.
Hình 1.17. Máy ảnh cầu vồng 3D
- Mã hóa biến đổi màu liên tục
Các mẫu chiếu có màu sắc thay đổi liên tục khác nhau được ghép lại để mã hóa các vị trí không gian. Sử dụng máy chiếu có thể tạo các dạng mẫu chiếu có cường độ biến đổi liên tục với mỗi màu khác nhau. Khi kết hợp các ảnh chiếu lại thành một ảnh sẽ cho ta một ảnh phổ biết rõ thông tin mã hóa. Chiếu mẫu chiếu kết hợp lên vật thể có thể xác định thông tin 3D của dựa vào nguyên tắc tam giác lượng như phương pháp camera cầu vồng 3D. Việc mã hóa từng mẫu chiếu riêng rẽ không nhất thiết chuẩn màu sắc cũng như cường độ chiếu không nhất thiết tuyến tính. Hình 1.18 cho thấy một ví dụ về mô hình biến đổi cường độ cho ba màu cơ bản. Khi kết hợp vào với nhau, một mô hình chiếu màu sắc như cầu vồng được hình thành.
Hình 1.18. Mẫu chiếu tạo ra bởi kết hợp 3 màu cơ bản
- Phương pháp đánh dấu đường sử dụng màu sắc
Với mục đích làm tăng tốc độ quét cũng như độ phân giải của ảnh quét thiết bị sử dụng cảm biến hình ảnh thường có ba dải màu độc lập, mỗi dải tương ứng với một băng tần. Sự kết hợp tuyến tính giá trị của các thành phần màu sắc có thể tạo ra một số lượng vô hạn màu sắc trên một ảnh chiếu. Ba kênh 8-bit có thể đại diện cho 224 màu sắc khác nhau. Đây là loại hệ thống mã màu có thể đạt được khả năng chụp ảnh bề mặt 3D theo thời gian thực. Nó cũng có thể mã hóa nhiều ảnh thành một hình ảnh chiếu nhiều màu sắc, mỗi mẫu sở hữu một giá trị màu sắc riêng trong không gian màu. Để giảm tỷ lệ lỗi giải mã, có thể thiết lập hệ màu sắc, trong đó mỗi màu có một khoảng cách tới màu khác trong mẫu chiếu. Số lượng tối đa của màu sắc trong mẫu được giới hạn trong khoảng cách giữa màu sắc tạo ra và bề rộng tối thiểu của vệt theo phương ngang qua hình ảnh.
Hình 1.19. Đánh dấu đường bằng cách sử dụng màu sắc
- Phương pháp sử dụng mẫu chiếu có đường chiếu mã hóa gián đoạn
Để phân biệt các đường quét có thể tạo ra các đường gián đoạn khi xây dựng lại biên dạng 3D để nhân biết các đường dựa trên sự mã hóa gián đoạn đó hình 1.20. Phương pháp chỉ áp dụng cho bề mặt trơn hoặc biên dạng không quá phức tạp gián đoạn vì đặc điểm của bề mặt có thể là nguyên nhân khó xác định được các đường đã mã hóa.
Hình 1.20. Mẫu chiếu có đường chiếu mã hóa gián đoạn
- Mẫu chiếu các đường được đánh dấu bằng cách sử dụng lặp đi lặp lại mẫu mức xám
Nếu có nhiều hơn hai mức cường độ được sử dụng có thể sắp xếp mức cường độ của các đường thành các nhóm đường tạo ra các nhóm đường mà không giới hạn số đường trong đó. Nếu sử dụng ba cấp độ màu mã xám (màu đen, màu xám và trắng), một mô hình chiếu có thể được thiết kế như (Hình 1.21) BGWGBGWBGBWBGW:
Hình 1. 21. Mẫu chiếu các đường được đánh dấu bằng cách sử dụng lặp đi lặp lại mẫu mức xám.
- Đánh dấu đường trình tự theo mã De Bruijn
Một chuỗi tuần tự De Bruijn cấp bậc n, kích thước k có kn phần tử: trong đó mỗi chu kì của độ dài n xuất hiện đúng một lần trong chu kì. Vòng tròn De Bruijnvới n = 3 và k = 2 (hai số 0, 1) có 23 = 8 phần tử ba chữ số mã hóa: 000, 001, 010, 011, 100, 101, 110, 111 gập đúng một lần trong chuỗi. Chuỗi tuần tự De Bruijn có thể được sử dụng trong việc xây dựng một chuỗi mô hình vân có mô hình biến đổi cục bộ duy nhất không lặp lại
Hình 1.22. Mô tả dãy De Bruijn
Hình 1.23. Mẫu chiếu sử dụng chuỗi De Bruijn (k=5, n=3)
Việc sử dụng kết hợp mã nhị phân với màu R, G, B để tạo ra một dải màu được đánh dấu dựa trên chuỗi De Bruijn. Số lượng tối đa sự kết hợp của ba màu sắc là 8 (= 23).Vì không sử dụng (0,0,0), chúng ta chỉ có bảy màu sắc. Vấn đề này có thể được giải quyết bằng cách xây dựng một chuỗi De Bruijn với k = 7, n= 3. Điều này dẫn đến một chuỗi với 343 đường. Nếu số vân quá nhiều, người ta có thể sử dụng một chuỗi De Bruijn bằng cách thiết lập k =5, n = 3. Số lượng vân trong trường hợp này còn 125. Có một hạn chế trong việc xây dựng một chuỗi chỉ số đường sử dụng kỹ thuật De Bruijn là tất cả các vân cạnh nhau phải có màu sắc khác nhau. Nếu không, một số vân với hai hoặc ba lần chiều rộng sẽ xảy ra gây nhầm lẫn các thuật toán tái tạo 3D để hạn chế có thể dễ dàng áp dụng bằng cách sử dụng một thuật toán XOR. Hình 1.23 cho thấy một tập hợp các kết quả thực tế với vân màu sắc được đánh dấu, tất cả các vân bên có màu sắc khác nhau.
- Mảng giả ngẫu nhiên nhị phân (PRBA)
Một lưới chỉ số sử dụng một mảng nhị phân giả ngẫu nhiên (PRBA) để tạo ra các vùng lưới có thể được đánh dấu bằng dấu chấm hoặc mô hình khác, như vậy mà mô hình mã hóa của bất kỳ subwindow là duy nhất. Một PRBA được xác định bởi mảng mã hóa n1x n2 bằng cách sử dụng chuỗi giả ngẫu nhiên, như vậy bất kỳ cửa sổ phụ có kích thước k1x k2 trượt trên toàn bộ mảng là duy nhất và hoàn toàn xác định tọa độ tuyệt đối của của sổ phụ (i,j) trong mảng. Mô hình mã hóa của mảng nhị phân được tạo ra dựa trên một chuỗi nhị phân giả ngẫu nhiên bằng cách sử dụng đa thức modulo 2n, trong đó 2n -1= 2k1k2- 1, n1= 2k1- 1, n2= 2n – 1/ n1. Hình 1.24 cho thấy một ví dụ về một PRBA tạo ra với k1= 5, k2= 2, và n1= 31, n2 =33.
Hình 1.24. Mảng 31 x 33 PRBA với kích thước subwindow 5x 2
- Mô hình mã nhỏ
Thay vì sử dụng một mảng nhị phân giả ngẫu nhiên như trên có sử dụng mảng giả ngẫu nhiên đa giá trị. Cũng giống phương pháp tạo mảng ở trên có thể tạo ra các mẫu mã đặc biệt nhỏ hơn tương ứng chứa đầy đủ các giá trị tồn tại trong mảng chính, các cửa sổ phụ thể hiện mã nhị phân cũng được xác định tương tự như trên. Hình 1.25 cho thấy một ví dụ về ba giá trị mảng giả ngẫu nhiên và một tập hợp các mảng mô hình nhỏ cũng như cửa sổ phụ để xác định vị trí các điểm lưới mã hóa.
Hình 1.25. Mô hình mã nhỏ
- Lưới mã hóa màu
Một lưới chỉ số mã hòa màu sắc cả hai chiều, các vân mã hóa theo chiều dọc và chiều ngang có thể là giống hoặc hoàn toàn khác nhau tùy thuộc vào các ứng dụng (Hình 1.26). Việc mã hóa này giúp xác định các điểm quét theo cả 2 hướng. Tuy nhiên, nếu bề rộng các đường quá hẹp sẽ ảnh hưởng đến sự tin cậy khi xác định các điểm cần đo.
Hình 1.26. Một ví dụ về lưới màu sắc
- Mảng 2 chiều mã hóa đốm màu
Có nhiều phương pháp khác tạo ra các mảng giả ngẫu nhiên đề xuất một thuật toán để tạo ra một mảng giữ được sự duy nhất của cửa sổ phụ. Phương pháp này là tương đối trực quan để thực hiện trong các thuật toán máy tính. Ví dụ hình 1.27 (bên trái) cho thấy 6x 6 mảng với kích thước cửa số phụ 3x3 sử dụng ba màu (R, G, B). Các quá trình tạo mảng như sau: đầu tiên lấp đầy trên góc bên trái của mảng 6 x 6 với một mẫu được chọn ngẫu nhiên. Sau đó thêm một cột ba yếu tố trên vào bên phải với chọn ngẫu nhiên. Tiếp tục bổ sung các cột cho đến khi tất cả các cột được làm đầy với mã ngẫu nhiên và subwindow được xác định. Tương tự như vậy, thêm ngẫu nhiên hàng theo hướng đi xuống từ vị trí subwindow ban đầu. Sau đó, thêm mã ngẫu nhiên mới theo hướng đường chéo. Lặp lại các quá trình cho đến khi tất cả các dấu chấm được điền đầy màu sắc. Hình 1.27 (bên phải) cho thấy một ví dụ về một mảng giả ngẫu nhiên với kích thước 20 x 18.
Hình 1.27. Ví dụ về mảng 2D mã đốm màu sắc
Kết luận: Vì kỹ thuật mã hóa tin cậy, ít nhạy cảm với bề mặt vật quét và khả năng chống nhiễu tốt nên chọn phương pháp mã hóa Gray.
CHƯƠNG 2 : TÍNH TOÁN THIẾT KẾ MÁY QUÉT 3D
2.1. Nguyên lý của thiết bị
Mô hình máy quét 3D sử dụng phương pháp đo bằng ánh sáng cấu trúc (mã hóa Gray) được chế tạo bước đầu đáp ứng được việc dựng lại hình ảnh 3D của vật quét bao gồm: một máy chiếu sử dụng công nghệ DLP, camera thu ảnh được bố trí thành cụm đầu đo có khả năng dịch chuyển tịnh tiến lên xuống theo phương Z nhờ bộ truyền đai.
Hình 2.1. Sơ đồ khối thiết bị đo
Hình 2.2. Sơ đồ nguyên lý máy quét 3D sử dụng ánh sáng cấu trúc
Bàn đặt vật đo được thiết kế có thể quay vật thể cần quét đảm bảo diện tích quét trên vật đo được tối đa với chuyển động chính là quay các góc khác nhau trên mặt phẳng chứa vật (quanh trục Oz) nhờ động cơ được gắn vào một đai răng dẫn động cho bàn quay.
Bộ phận cơ khí được điều khiển bởi 1 máy tính cá nhân: Máy tính kết nối với máy chiếu điều khiển hình ảnh vân chiếu lên vật cần quét và thực hiện các kết nối điều khiển quá trình chuyển động của đầu đo, bàn gá vật, thu nhận và xử lý hình ảnh thu được từ các camera. Phần mềm cho thiết bị bao gồm các phần mềm điều khiển cấu trúc vân cho máy chiếu, phần mềm điều khiển sự dịch chuyển của các bộ phận và phần mềm thu nhận xử lý ảnh dựng lại hình ảnh 3D của vật thể. Các phần mềm được viết trên Matlab. Thiết bị có khả năng quét các vật thể có kích thước 500x500x1800 mm3.
Hình 2.3. Sơ đồ động của máy quét 3D
Trong quá trình thực hiện phép đo. Máy tính điều khiển quá trình chiếu và chụp ảnh của cụm cảm biến, vị trí đo của đối tượng cũng như cảm biến được điều khiển từ máy tính thông qua bảng mạch vi xử lý Pickit 16F877A, bo mạch xử lý này điều khiển các driver M542D tác động lên các động cơ dẫn động cho thiết bị đo. Cụm đầu đo chiếu và thu ánh sáng cấu trúc được mã hóa Gray thông qua phần mềm điều khiển từ máy tính.
2.2. Phương pháp mã hóa Gray
2.2.1. Mã hóa Gray
Mã hóa Gray là một dạng ánh sáng cấu trúc mã nhị phân được sử dụng trong phương pháp quét biên dạng 3D của đối tượng với các mẫu chiếu chỉ có các vạch trắng và đen xen kẽ, do đó mẫu chiếu mã hóa Gray còn được gọi là mẫu chiếu nhị phân. Ý tưởng cơ bản của phương pháp này là chiếu các mẫu chiếu sao cho chia không gian chiếu thành các phần riêng biệt và mỗi phần có thể nhận biết bằng một mã nhị phân dựa trên các mẫu chiếu tuần tự. Hình 2.3 cho thấy một mô hình chiếu 5-bit. Khi chuỗi này được chiếu lên một vùng không gian sẽ mã hòa vùng không gian đó thành 32 phần riêng biệt theo phương ngang. Coi vùng đen có mã nhị phân là 0 và vùng trắng có mã nhị phân là 1. Tại vùng thứ 23 từ trái sang (vùng đánh dấu đường gạch tại A) ta có mã bit đặc trưng là 10110, tương tự vị trí 22 là 10101….
|
A |
Hình 2.4. Mẫu chiếu dạng mã nhị phân.
Như vậy, trong phương pháp mã hóa Gray nếu có n mẫu chiếu, ta sẽ có 2n vùng được đánh dấu trong không gian chiếu. Để độ phân giải theo phương ngang tăng lên phải tăng số mẫu chiếu. Việc tăng số mẫu chiếu bị giới hạn bởi phần cứng hệ thống chiếu cũng như khả năng phân biệt vùng đen trắng trên nền chiếu của camera sử dụng. Tương tự như phương pháp dịch pha mỗi điểm ảnh thu được trên camera sẽ tương ứng với điểm trên đối tượng cần đo. Việc xác định độ cao của điểm đo được xác định theo nguyên tắc tam giác lượng trong quang học.
Phương pháp mã hóa nhị phân được Posdamer and Altschuler đề cập lần đầu tiên trong lĩnh vực đo lường biên dạng vào năm 1981, với việc chiếu tuần tự n mẫu chiếu để mã hóa thành 2n vân sử dụng mã hóa nhị phân. Mỗi vân trên mẫu chiếu cuối cùng sở hữu một mã nhị phân riêng biệt và duy nhất. Nghiên cứu cho rằng, các điểm ảnh trên cùng một vân có cùng mã nhị phân, khi tiến hành phương pháp tam giác lượng xác định tọa độ, các điểm đo cần xác định vị trí tâm vân hoặc biên của vân trên vật để dựng lại lưới điểm quét.
Hình 2.5. Mã nhị phân đơn giản
Phát triển nguyên lý của Posdamer và Altschuler, Inokuchi.... sử dụng mẫu chiếu mã nhị phân dạng Gray. Với dạng mẫu chiếu này mã nhị phân của các vùng chiếu này có khoảng Hamming bằng 1, giúp cho việc xử lý nhiễu dễ dàng hơn.
.
Hình 2.6 .Mã nhị phân dạng Gray
Gartner et. al. đã đưa các tiêu chuẩn sau đây để đánh giá một mã nhị phân:
- Nhận dạng duy nhất: Mỗi mã trong bộ mã được xác định bởi một thuật toán mã nhị phân cần phải là duy nhất và không có sự trùng lặp giữa các mã.
- Khả năng tự thích nghi: Để xác định mã cho một điểm ảnh sử dụng ngưỡng cường độ tạo thành bản đồ bit. Do ảnh hưởng của ánh sáng môi trường và sự phản xạ của các bề mặt đối tượng đo làm cho cường độ tỉ lệ xám của vân sáng và vân tối trong ảnh có thể thay đổi trên các vùng khác nhau của hình ảnh. Vì vậy, trong phương pháp này giá trị ngưỡng cố định của toàn bộ mẫu chiếu sẽ không được sử dụng. Thuật toán xác định giá trị ngưỡng phù hợp với từng điểm ảnh được nghiên cứu với điều kiện vùng mã hóa trên vật quét phải tồn tại giá trị nhị phân.
Khoảng Hamming giữa hai mã tiếp giáp bằng 1. Khoảng Hamming được định nghĩa là số bit khác nhau khi so sánh hai mã theo vị trí tương ứng. Ví dụ, các khoảng Hamming giữa "10011001" và "10111011" là 2 vì hai bit trong mã thứ 3 và thứ 7 là khác nhau. Kích thước các điểm ảnh là hữu hạn, do đó một điểm ảnh có thể chứa ranh giới giữa vân trắng và vân đen dẫn tới việc xác định mã bit của điểm ảnh đó trở lên khó khăn và gây ra lỗi trong quá trình tính toán. Tuy nhiên, nếu khoảng cách Hamming giữa các vùng mã liền kề luôn luôn là 1 có thể giúp cho thuật toán xác định các điểm mơ hồ từ đó xác định được các điểm nhiễu để ứng dụng các phương pháp xử lý nhiễu khác. Như vậy, đối với cách chiếu vân sử dụng mã nhị phân cơ bản có các khoảng Hamming có giá trị biến thiên sẽ gặp những bất lợi trong giải thuật tính toán so với phương pháp chiếu sử dụng mã hóa Gray.
2.2.2. Mô hình toán học xác định tọa độ đám mây điểm đo.
Thiết bị sử dụng cảm biến gồm một camera và một máy chiếu. Việc xây dựng mối quan hệ tương quan của camera, máy chiếu và đối tượng đo có thể xác định được tọa độ đám mây điểm đo. Thuật toán dựng hình sử dụng phương pháp đường giao đường như hình 2.7. Khi đó điểm đo M được xác định là giao của tia sáng từ máy chiếu và tia phản xạ thu được từ camera. Các thông số xác định trong thuật toán này bao gồm:
ü Tất cả các thông số nội tham số của camera ví dụ như ma trận nội tham số A và các hệ số méo của hệ quang camera ks (s=1,…,5) với trong đó (u0, v0) là điểm gốc của hệ tọa độ pixel trên mặt phẳng ảnh của camera, fx và fy là hệ số tỷ lệ tương ứng cho 2 trục tọa độ u và v, α là hệ số nghiêng của trục u và v.
Hình 2.7. Mô hình camera lỗ nhỏ
Trên hình 2.7 biểu diễn mô hình camera lỗ nhỏ có C là tâm hệ tọa độ của camera (XC, YC, ZC ).
ü Vị trí tâm chiếu P của máy chiếu có tọa độ P(Px, Py, Pz) tương ứng với hệ tọa độ của camera.
ü Mặt phẳng chuẩn được xác định bởi điểm gốc OR ( là giao điểm của trục quang máy chiếu và trục quang camera) và vector pháp tuyến nR
Hình 2.8. Sơ đồ xác định đám mây điểm đo
ü Mỗi pixel (u, v) trên mặt phẳng ảnh của camera được xác định bởi một giá trị mã hóa Gray duy nhất, tương ứng với tọa độ 2D của điểm đo M(x, y). Thuật toán xây dựng tọa độ 3D của điểm M. Hình 2.8 diễn tả mối quan hệ quang hình học trong việc tính toán tọa độ 3D của điểm M. Điểm M nằm trên đối tượng có ảnh là điểm MI nằm trên mặt phẳng ảnh của camera. Điểm này có thể được xác định từ mô hình camera lỗ nhỏ và điểm M nằm trên đường thẳng . Điểm MR được xác định là giao của đường thẳng với mặt phẳng chuẩn và điểm NI là giao của đường thẳng với mặt phẳng ảnh của camera. Điểm Q được định nghĩa là giao của đường thẳng và mặt phẳng song song với mặt phẳng chuẩn đi qua điểm P. Từ đó có thể thấy rằng các điểm C, P, Q, MI, NI, MR, NR, NP và M là đồng phẳng. Điểm M là giao của 2 tia và .
Các bước để tính toán vị trí 3D của điểm M như sau:
1.Xác định tọa độ pixel của điểm NI thông qua việc chiếu ánh sáng mẫu mã hóa Gray lên mặt phẳng chuẩn. Điểm này đã được mã hóa chính là điểm NP (nằm trên mặt phẳng ảnh của máy chiếu)
2.Tọa độ 3D của điểm MI, NI được tính toán từ tọa độ pixel của chúng bằng cách sử dụng mô hình camera lỗ nhỏ và các nội tham số của camera.Tọa độ 3D của MR và NR có thể được tính toán bằng phương pháp đường giao đường:
,
Trên thực tế do sai số hệ quang dẫn tới trục quang của camera và trục quang máy chiếu có thể cắt nhau hoặc chéo nhau. Trong trường hợp chéo nhau điểm M có thể xác định là trung điểm của đường vuông góc chung của 2 trục quang máy chiếu và trục quang camera.Ta xây dựng được phương trình đường thẳng của trục quang camera và trục quang máy chiếu. Sau đó xác định đường vuông góc chung của 2 đường thẳng
Hình 2. 9. Phương pháp xác định đường vuông góc chung của 2 đường thẳng chéo nhau
Hình 2.10. Xác định tọa độ 3D của điểm M
Để xây dựng mặt phẳng (α) chứa và song song với với các điểm P(Px, Py, Pz) và C(XC, YC, ZC) đã biết và ta biết được vector chỉ phương của trục quang camera và máy chiếu lần lượt là và . Vector pháp tuyến của mặt phẳng (α) qua đi qua CM1 và song song với PNP là ta có phương trình mặt phẳng (α) như sau:
a1(x-XC) + b1(y-YC) + c1(z-ZC) = 0
Lập mặt phẳng (β) vuông góc với mặt phẳng (α) và đi qua CMI như vậy mặt phẳng (β) có 2 vector chỉ hướng là và ( vector pháp tuyến của mặt phẳng (β) là ). Phương trình mặt phẳng (β) là:
a2(x-XC) + b2(y-YC) + c2(z-ZC) = 0
Tìm giao điểm của vector với mặt phẳng (β) là 1 điểm G1 thuộc đường vuông góc chung của và . Tương tự lập 1 mặt phẳng (γ) đi qua chứa và vuông góc với (α). Giao của mặt phẳng (γ) và tia là điểm G2. Từ đó lấy trung điểm của G1G2 ta được tọa độ của điểm M từ đó xác định đươc tọa độ 3D của điểm M.
2.2.3.Xây dựng thuật toán xử lý ảnh
Ảnh thu được trong quá trình quét là ảnh mã hóa Gray. Trong phương pháp này sử dụng 11 ảnh từ 20 đến 210. Với 11 ảnh đó sẽ được chiếu theo phương nằm ngang, thẳng đứng và đảo bít nên như vậy ta có 44 ảnh mẫu mã hóa Gray. Do ảnh đen và ảnh trắng không phân biệt chiếu theo phương ngang hay thẳng đứng nên ta có tổng số ảnh chiếu lên vật cần đo biên dạng là 42 gồm: một ảnh đen và một ảnh trắng, 20 ảnh theo phương ngang và 20 ảnh theo phương thẳng đứng.
Hiệu chuẩn hệ thống và tiến hành giải mã cho kích thước vật theo mã Gray trong trường chiếu của máy chiếu (1024x768) có 256 đường ngang và 192 đường dọc được mã hóa tương đương 49152 điểm được quét. Sơ đồ thuật toán phương pháp Gray được trình bày trên hình 2.11.
Hình 2.11. Thuật toán giải mã phương pháp mã hóa Gray
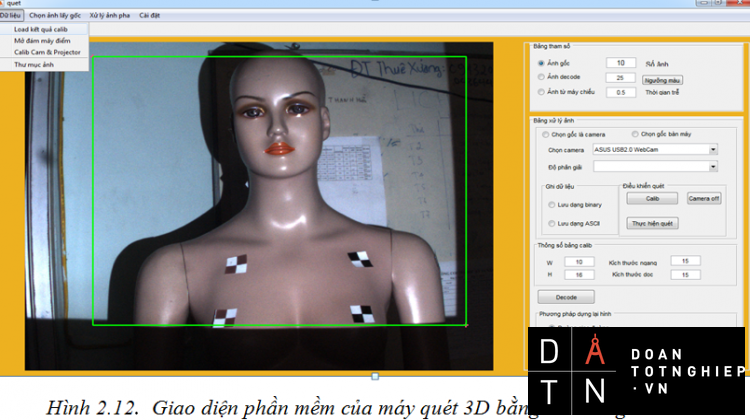
Trên hình 2.12 là giao diện phần mềm của thiết bị đo biên dạng 3D sử dụng phương pháp mã hóa Gray. Công cụ “Load kết quả calib” nằm trong “Dữ liệu” tiến hành tải kết quả hiệu chuẩn thiết bị vào chương trình xử lý. Trên giao diện còn có thanh công cụ chứa các nút lệnh thực hiện việc giải mã cho phần quét sử dụng mã hóa Gray bao gồm:
- “Dữ liệu”: Chọn đường dẫn đến file dữ liệu chứa ảnh xử lý.
- “Decode”: tiến hành giải mã các ảnh thu được
Công cụ theshold là lựa chon ngưỡng cường độ giải mã xác định ngưỡng nhị phân của điểm ảnh. Patterms là số mẫu chiếu trong phương pháp mã hóa Gray.
Hình 2.12. Giao diện phần mềm của máy quét 3D bằng ánh sáng cấu trúc
2.3. Lựa chọn hệ thống camera và máy chiếu
2.3.1 Chọn máy chiếu
Máy chiếu nói chung có thể phân loại theo hai công nghệ, DLP (Digital Light Processing) và LCD (Liquid Crystal Display). Công nghệ này liên quan đến cơ chế hoạt động bên trong mà máy chiếu sử dụng để hiển thị hình ảnh. Phương pháp truyền qua thường dùng tấm LCD trong khi phương pháp phản chiếu lại sử dụng hàng ngàn gương nhỏ tương ứng hàng ngàn điểm ảnh. Mỗi phương pháp đều có ưu và nhược điểm riêng, song sự khác biệt về chất lượng hiện tại đã được rút ngắn đến mức khó phân biệt. Ngoài ra còn có thể sử dụng việc chiếu sáng qua các cách tử và di chuyển các cách tử tuy nhiên có nhiều nhược điểm nên hiện nay thường sử dụng hai công nghệ trên.
- Công nghệ LCD
Máy chiếu LCD (Liquid Crystal Display) tổng hợp hình ảnh màu dựa trên 3 màu cơ bản là đỏ, lục và xanh dương (RGB) cơ chế đang được dùng phổ biến trong chế tạo màn hình, in ấn. Nguồn sáng trắng ban đầu được tách thành 3 nguồn sáng đơn sắc là đỏ, lục, xanh dương và được dẫn đến 3 tấm LCD độc lập. Nếu điểm ảnh trên LCD ở trạng thái đóng, ánh sáng không thể xuyên qua thì điểm ảnh biểu diễn trên màn hình là đen. Tương tự, độ sáng của điểm ảnh cũng thay đổi tương ứng theo trạng thái mở của điểm ảnh LCD. Điều khiển 3 tấm LCD đóng mở điểm ảnh theo thông tin ảnh số, ta thu được 3 ảnh đơn sắc theo hệ màu RGB. Sau đó, tất cả được tổng hợp một cách tự nhiên trong một lăng kính theo cơ chế ánh sáng trước khi xuất đến màn chiếu. Hình 2.13 thể hiện sơ đồ nguyên lý cấu tạo của máy chiếu LCD trong đó các thành phần gồm có:
- Light source: Nguồn sáng.
- Red dichroic mirror: Gương sắc đỏ.
- Blue dichroic mirror: Gương sắc xanh.
- Dichroic mirror "wavelength selector": Gương chọn lọc bước sóng.
- Mirror: Gương phản chiếu.
- LCD: Bộ phận hiển thị tinh thể lỏng.
- Dichroic combiner cube: Thành phần tổng hợp 3 sắc đỏ, xanh lục, xanh.
- Lens: Thấu kính.
Hình 2.13. Sơ đồ nguyên lý cấu tạo của máy chiếu LCD
Ưu điểm của LCD
Ưu điểm của máy chiếu LCD 3 tấm là thể hiện phong phú sắc độ màu, sắc nét và độ sáng cao. Do tổ hợp cùng lúc 3 màu RGB với nguồn sáng ổn định, không suy giảm, máy chiếu LCD 3 tấm tái hiện màu phong phú và chuyển tiếp màu mượt hơn công nghệ DLP 1 tấm. Độ sắc nét của máy chiếu LCD 3 tấm trội hẳn DLP trong các ứng dụng. Hiệu suất ánh sáng (ANSI lumen xuất ra/công suất đèn) của máy chiếu LCD cũng có phần nhỉnh hơn DLP.
Nhược điểm của LCD
- Hiệu ứng "ca-rô" làm hình ảnh trông bị "vỡ hạt".
- Cấu tạo lớn hơn, vì có nhiều thành phần bên trong hơn.
- Hiện tượng "điểm chết" - các ảnh điểm có thể luôn tắt hay luôn mở, được gọi là điểm chết. Nếu máy chiếu có nhiều điểm chết, nó sẽ gây khó chịu cho người dùng.
- Các tấm kính LCD có thể bị hỏng và thay thế rất đắt tiền.
- Công nghệ DLP
Digital Light Processing là giải pháp hiển thị kỹ thuật số. Công nghệ DLP sử dụng một vi mạch bán dẫn quang học, gọi là Digital Micromirror Device hay DMD để tái tạo dữ liệu nguồn. Trái ngược với phương pháp trong suốt cho ánh sáng truyền qua của LCD, công nghệ DLP do Texas Instruments phát triển độc quyền vào năm 1997 sử dụng vi gương để phản chiếu ánh sáng. Một chip DMD (Direct Micromirror Device) được tích hợp đến hàng ngàn vi gương, mỗi vi gương tương ứng một điểm ảnh. Vì gương dao động hàng ngàn lần/ giây và thể hiện được 1024 cấp độ xám. Để thể hiện hình ảnh màu, một bánh quay màu (color wheel) được đặt giữa nguồn sáng và DMD. Phổ biến hiện nay là hệ thống sử dụng bánh quay 4 màu gồm đỏ, lục, xanh dương, trắng để lần lượt tạo và xuất ra 4 ảnh đơn sắc trong một chu kỳ. Thay vì tổng hợp tự nhiên tại thấu kính, 4 hình ảnh đơn sắc lần lượt được ghi nhận và tổng hợp tại não người.
(a) (b)
Hình 2.14. (a) Sơ đồ nguyên lý cấu tạo máy chiếu DLP; (b)cấu tạo điểm ảnh trên chip DMD
- Light source: nguồn sáng
- Optics: bộ phận quang học
- Color filter: bộ lọc màu
- Circuit board: bo mạch
- DMD: chip DMD
Ưu điểm của DLP
- Hiệu ứng "ca-rô" (lưới) ít hơn vì các ảnh điểm gần nhau hơn nên làm cho hình ảnh video mịn hơn.
Hình 2.15. So sánh chất lượng hình ảnh tạo ra bởi máy chiếu LCD và DLP
- Có thể đạt độ tương phản (contrast) cao hơn.
- Gọn nhẹ, dễ di động hơn do có ít thành phần hơn.
- Một số nghiên cứu cho rằng máy chiếu DLP có tuổi thọ cao hơn máy chiếu LCD.
Ưu điểm của DLP là tạo được hình ảnh mượt, không lộ điểm ảnh, tương phản cao và không bị hiện tượng lệch hội tụ như công nghệ dùng LCD 3 tấm. Mặt khác, cấu tạo máy chiếu DLP đơn giản hơn LCD 3 tấm nên kích thước máy nhỏ và nhẹ hơn. Nhờ đưa thêm màu trắng vào bánh quay màu mà hình ảnh tạo ra bởi máy chiếu DLP sáng hơn và có màu trắng rất thuần khiết. Tuy nhiên, điều này lại làm cho tỷ lệ cân bằng giữa các màu chênh lệch và làm giảm sắc độ màu biểu diễn. Để khắc phục, máy chiếu DLP có thể dùng bánh quay 6 màu (2 bộ màu RGB) và có trường hợp bổ sung thêm màu lục đậm, xanh dương đậm (bánh quay 7 màu hoặc 8 màu). Việc loại bỏ màu trắng và dùng bánh quay nhiều màu giúp máy chiếu DLP thể hiện màu tươi, phong phú sắc độ hơn nhưng độ sáng bị giảm xuống vì vậy để có thể chiếu tốt hơn với máy chiếu DLP thì không gian phòng chiếu cần tối.
Nhược điểm của DLP
- Độ bão hoà màu thấp hơn .
- Hiệu ứng "cầu vồng", xuất hiện dưới dạng một vệt sáng giống như cầu vồng loé lên, thường theo sau những vật thể sáng, khi nhìn từ cạnh này sang cạnh kia của màn ảnh, hay khi từ hình ảnh chiếu trên màn ảnh quay sang nhìn vật thể ngoài màn ảnh. Có 2 loại máy chiếu DLP, loại cũ có 4 phần trên bộ lọc màu, loại mới có 6 phần và bộ lọc màu quay nhanh hơn, điều đó làm giảm hiệu ứng "cầu vồng" và tăng độ bão hoà màu.
- Hiệu ứng "vầng hào quang" (hay lộ sáng). Về cơ bản, đó là một dải xám xung quanh rìa của hình ảnh gây ra do ánh sáng bị "tán xạ" khi chiếu vào các cạnh của vi gương trên chíp DLP. Có thể khắc phục bằng cách tạo một đường biên đen rộng vài inch quanh màn ảnh, "vầng hào quang" sẽ rơi trên đường biên này. Tuy nhiên, hiệu ứng "vầng hào quang" ít thấy rõ trên các chip DLP mới như chip DDR.
Qua việc phân tích ở trên, đối với các thiết bị đo sử dụng ánh sáng cấu trúc, các máy chiếu DLP có nhiều ưu điểm nổi trội và đáp ứng tốt hơn máy chiếu công nghệ CCD. Để thiết kế thiết bị đo biên dạng sử dụng sáng cấu trúc chọn máy chiếu Model InFocus IN114A. Đây là máy chiếu có chất lượng khá tốt và giá thành rẻ phù hợp điều kiện nghiên cứu chế tạo tại Việt Nam. Đặc tính kĩ thuật của máy chiếu Model InFocus IN114A được mô tả như bảng sau:
Bảng 2.1.Thông số kĩ thuật máy chiếu sử dụng trong thiết bị
|
Thông số |
Model InFocus IN114A
|
|
Độ phân giải cơ bản |
XGA 1024x768 |
|
Độ phân giải lớn nhất |
WUXGA 1290x1200 |
|
Công nghệ hiển thị |
Chip DLP 0,55” |
|
Độ sáng |
3000 -3200 lumens |
|
Tuổi thọ bóng đèn |
5000- 6000 h |
|
Công suất bóng đèn |
190 W |
|
Độ tương phản |
15000: 1 |
|
Ống kính |
Điều chỉnh tiêu cự và lấy nét |
|
Khoảng cách chiếu |
Đến 11,9 m |
|
Cỡ ảnh |
Đến 299 inches |
|
Số màu |
1,07 tỷ màu |
|
Nguồn tín hiệu vào |
HDMI 1.4, VGA x 2, Composite Video, S-Video, 3.5 mm stereo input x 2, RS232C, USB Type B (control & firmware) |
|
Kích thước |
292 x220 x108 mm |
|
Khối lượng |
3,22 kg |
|
Khoảng nhiệt làm việc |
0 – 40 oC |
2.3.2.Chọn camera
Lựa chọn camera dùng trong thiết bị có model DFK 41BU02 của hãng ImagingSource, CHLB Đức. Đây là camera công nghiệp có độ ổn định cao khi làm việc và được hãng hỗ trợ các công cụ lập trình trong matlab cho phép điều khiển từ máy tính. Thông số cụ thể được trình bày như bảng 2.2.
Bảng 2.2. Thông số kĩ thuật camera sử dụng trong thiết bị
|
Thông số |
Camera dfk 41 bu02
|
|
Định dạng video @ khung hình trên giây |
1280x960UYVY @ 7.5, 3.75 fps |
|
Độ nhạy sáng |
0.15 lx |
|
Độ rộng màu |
8 bit |
|
Lọc hồng ngoại |
Có |
|
Màn trập |
Có |
|
Kích thước cảm biến |
1/2 " |
|
Độ phân giải |
H: 1360, V: 1024 |
|
Kích thước pixel |
H: 4.65 µm, V: 4.65 µm |
|
Dạng nối ống kính |
C/CS |
|
Điện áp |
4.5 đến 5.5 VDC |
|
Dòng tiêu thụ |
Khoảng 500 mA tại 5 VDC |
|
Kích thước bao |
H: 50.6 mm, W: 50.6 mm, L: 56 mm |
|
Khối lượng |
265 g |
|
Tốc độ màn trập |
1/10000 đến 30 s |
|
Khuếch đại |
0 đến 36 dB |
|
Offset |
0 đến 511 |
|
Độ bão hòa màu |
0 đến 200 % |
|
Cân bằng trắng |
-2 dB đến +6 dB |
|
Nhiệt độ làm việc |
-5 °C đến 45 °C |
|
Nhiệt độ bảo quản |
-20 °C đến 60 °C |
|
Độ ẩm làm việc |
20 % đến 80 % |
|
Độ ẩm bảo quản |
20 % đến 95 % |
Từ việc khảo sát vùng chiếu của máy chiếu và khả năng nhìn của camera đưa ra sơ đồ bố trí máy chiếu và camera như sau:
Hình 2.16. Sơ đồ bố trí camera và máy chiếu
- Lựa chọn ống kính cho camera.
Vùng quan sát theo yêu cầu bài toán có đường kính tính theo đường chéo hình lập phương cạnh a = 500 mm.
Hình 2.17. Cách xác định kích thước cảm biế
.........................................................................
CHƯƠNG 4: KẾT LUẬN
4.1.Kết quả đạt được
Đây là đề tài mới tại Việt Nam nên trong quá trình tìm hiểu , thực hiện nhóm em đã gặp phải những khó khăn nhất định về việc tìm hiểu , tham khảo tài liệu nhưng được sự hướng dẫn chỉ bảo của thầy cô giáo cùng nỗ lực tìm tòi nghiên cứu nhóm em đã đạt được những kết quả sau:
- Thiết kế và chế tạo hệ thống cơ khí máy quét.
- Thiết kế và tích hợp hệ thống mạch điện, điều khiển
- Tìm hiểu và ứng dụng thuật toán dựng hình và ghép hình
- Xử lý dữ liệu quét thành kết quả quét hoàn chỉnh
- Đo được một số kích thước chính của cơ thể người.
- Bước đầu phục vụ cho việc nghiên cứu sâu hơn cho phương pháp đo 3D bằng ánh sáng cấu trúc.
- Nâng cao độ cứng vững cho hệ thống cơ khí
- Giảm thời gian quét của máy bằng việc kết hợp các phương pháp sử dụng ánh sáng cấu trúc
- Sử dụng đầu đo linh hoạt để giảm vùng tối mà máy chiếu không chiếu tới đối tượng quét gây ra lỗ trên biên dạng 3D khi dựng lại
4.2.Hướng phát triển
- Nâng cao độ cứng vững cho hệ thống cơ khí
- Giảm thời gian quét của máy bằng việc kết hợp các phương pháp sử dụng ánh sáng cấu trúc
- Sử dụng đầu đo linh hoạt để giảm vùng tối mà máy chiếu không chiếu tới đối tượng quét gây ra lỗ trên biên dạng 3D khi dựng lại
PHỤ LỤC
CODE CHƯƠNG TRÌNH MÁY QUÉT
- Phụ lục code chương trình sử lý ảnh
function varargout = quet(varargin)
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @quet_OpeningFcn, ...
'gui_OutputFcn', @quet_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before quet is made visible.
function quet_OpeningFcn(hObject, ~, handles, varargin)
handles.output = hObject;
global w_cam h_cam w_proj h_proj
%Thong so pixel cua camera va projector
w_cam = 1280;h_cam = 960;
w_proj = 1024;
h_proj = 768;
%Hien thi toan bo camera
camlst = webcamlist;
if isempty(camlst)
set(handles.popCamera,'String','Không có thiet bi nào ket noi');
else
set(handles.popCamera,'String',camlst);
end
set(handles.camera,'String','Camera off');
%Tat va an tat ca cac axes
axis(handles.axes1,'off');
axis(handles.axes2,'off');
axis(handles.axes3,'off');
set(handles.axes1,'Visible','off');
set(handles.axes2,'Visible','off');
set(handles.axes3,'Visible','off');
addpath('./Myfiles');
addpath('./utilities');
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes quet wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = quet_OutputFcn(hObject, eventdata, handles)
varargout{1} = handles.output;









