ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ MÁY KHẮC CNC LASER PHẦN MỀM ĐIỀU KHIỂN MACH 3



NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ MÁY KHẮC CNC LASER PHẦN MỀM ĐIỀU KHIỂN MACH 3
2048 MB Bao gồm tất cả file CAD, file 2D thiết kế 3D , file DOC (DOCX), thuyết minh, quy trình sản xuất, bản vẽ nguyên lý, bản vẽ THIẾT KẾ CẢI TIẾN, ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ MÁY KHẮC CNC LASER PHẦN MỀM ĐIỀU KHIỂN MACH 3

THIẾT KẾ CẢI TIẾN, CHẾ TẠO MÔ HÌNH THIẾT KẾ MÁY KHẮC CNC LASER CẢI TIẾN) , ĐỒ ÁN TỐT NGHIỆP THIẾT KẾ MÁY KHẮC CNC LASER PHẦN MỀM ĐIỀU KHIỂN MACH 3, bản vẽ nguyên lý THIẾT KẾ MÁY KHẮC CNC LASER
Mục Lục
Phần A: GIỚI THIỆU
LỜI NÓI ĐẦU.. 6
Ý KIẾN CỦA GIÁO VIÊN HƯỚNG DẪN.. 8
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN.. 9
NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN.. 10
NHẬN XÉT CỦA HỘI ĐỒNG CHẤM ĐỒ ÁN.. 11
Phần B: NỘI DUNG
PHẦN CƠ KHÍ
CHƯƠNG MỞ ĐẦU
1. ĐẶT VẤN ĐỀ. 12
2. GIỚI HẠN ĐỀ TÀI13
3. MỤC ĐÍCH NGHIÊN CỨU.. 13
4. CƠ SỞ LÝ LUẬN.. 13
Chương 1
TỔNG QUAN VỀ MÁY CNC.. 15
1. GIỚI THIỆU CHUNG VỀ MÁY CNC.. 15
1.1 Khái niệm.. 15
1.2 Lịch sử phát triển của hệ thống máy CNC.. 15
1.3 Những đặc điểm cơ bản của máy CNC.. 16
2. CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN TRÊN MÁY CNC.. 17
2.1 Điều khiển 2D.. 17
2.2 Điều khiển 21/2 D.. 17
2.3 Điều khiển 3D.. 18
3. CẤU TRÚC TỔNG THỂ MÁY CNC.. 18
3.1 Phần điều khiển. 19
3.2 Phần chấp hành. 19
4. HỆ TRỤC TỌA ĐỘ TRÊN MÁY CNC.. 20
5. PHÂN LOẠI MÁY.. 22
6. GIỚI THIỆU CHUNG VỀ MÁY LASER TỰ ĐỘNG.. 22
6.1 Những Máy Của Hãng Sản Xuất22
6.2 Những Máy Tự Chế Trên Thị Trường. 24
6.3 Cải tiến Chế Tạo Máy khắc laser Tự Động. 26
Chương 2
CÁC PHƯƠNG ÁN CHO MÔ HÌNH THIẾT KẾ. 27
1. PHƯƠNG ÁN CHO CHUYỂN ĐỘNG CỦA MÁY.. 27
1.1. Phương án 1 ( phôi di chuyển)27
1.1.1 Ưu diểm của phương án 1. 27
1.1.2 Nhược điểm của phương án 1. 27
1.2 Phương án 2 ( phôi đứng yên)27
1.2.1 Ưu diểm của phương án 2. 28
1.2.2 Nhược điểm của phương án 2. 28
2. CHỌN PHƯƠNG ÁN CHO CHUYỂN ĐỘNG.. 28
3. CÁC PHƯƠNG ÁN TRUYỀN ĐỘNG CỦA MÁY.. 29
3.1 Vít Me Đai Ốc Thường. 29
3.2 Vít Me Đai Ốc Bi29
3.3 Truyền Đai31
4. KẾT LUẬN.. 32
5. CÁC THÔNG SỐ KỸ THUẬT CHO MÁY.. 32
Chương 3
CÁC LOẠI ĐỘNG CƠ ĐƯỢC SỬ DỤNG TRONG MÁY CNC.. 33
1. YÊU CẦU KỸ THUẬT CỦA ĐỘNG CƠ CHẤP HÀNH ( ĐCCH) TRONG MÁY CNC 33
1.1 Vai trò của động cơ chấp hành trong máy CNC.. 33
1.2 Yêu cầu kỹ thuật của động cơ chấp hành trong máy CNC.. 33
2. GIỚI THIỆU MỘT SỐ ĐCCH TRONG MÁY CNC.. 33
2.1 Động cơ chấp hành một chiều. 33
2.1.1 Khái niệm.. 34
2.1.2 Phân loại động cơ điện một chiều. 35
2.2 Động cơ bước. 35
2.2.1 Khái niệm, đặc điểm và phân loại35
2.2.2 Động cơ bước nam châm vĩnh cửu (Permanent Motor)37
2.2.3 Động cơ bước có từ trở thay đổi38
2.2.4 Động cơ bước hỗn hợp. 40
2.2.5 Hệ điều khiển động cơ bước. 41
2.3 Động cơ Servo. 42
2.3.1 Khái niệm.. 42
2.3.2 Phân loại42
2.3.3 Cấu tạo. 43
2.4 Động cơ điện xoay chiều. 45
3. CHỌN ĐỘNG CƠ CHO MÔ HÌNH THIẾT KẾ. 46
3.1 Chọn loại động cơ cho các chuyển động trục X, Y, Z. 46
3.2 Laser sử dụng cho máy. 46
Chương 4
THIẾT KẾ MÁY.. 48
1. SƠ ĐỒ ĐỘNG HỌC MÁY.. 48
1.1 Sơ đồ kết cấu dẫn động theo 3 trục X,Y và Z. 48
2. TÍNH TOÁN CÔNG SUẤT CÁC ĐỘNG CƠ CHẤP HÀNH.. 49
2.1 Ý nghĩa của việc tính toán công suất động cơ. 49
3. ĐỘNG CƠ CHẤP HÀNH CHO CHUYỂN ĐỘNG CHẠY DAO.. 49
3.1 Động cơ chấp hành cho chuyển động chạy dao theo phương ngang Y và phương dọc X 49
3.2 Tính công suất cho động cơ chạy dao theo trục Z. 50
4. TÍNH TOÁN BỘ TRUYỀN VÍT ME – ĐAI ỐC BI CỦA MÁY.. 51
5. CƠ CẤU DẪN HƯỚNG CHO CHUYỂN ĐỘNG TRỤC Z. 52
5.1 Giới thiệu về sóng trượt52
5.2 Giới thiệu về sóng lăn. 53
5.3 Chọn cơ cấu dẫn hướng. 54
6. CƠ CẤU DẪN HƯỚNG CHO CHUYỂN ĐỘNG TRỤC X, Y.. 55
7. CHỌN CÁC BỘ PHẬN KHÁC CỦA MÁY.. 60
7.1 Thân máy. 60
7.1.1 Tác dụng, yêu cầu của thân máy. 60
7.1.2 Vật liệu dùng làm thân máy. 60
7.1.3 Lựa chọn thân máy. 61
7.2 Lựa chọn ổ bi, gối đỡ.61
- XÁC ĐỊNH ĐỘ CHÍNH XÁC CỦA MÁY.. 63
8.1 Độ Chính Xác Của Máy. 63
8.2 So Sánh Với Các Máy khắc. 63
PHẦN C : ĐIỀU KHIỂN
Chương 1
TỔNG QUAN HỆ THỐNG ĐIỀU KHIỂN.. 64
1. TỔNG QUAN VỀ HỆ THỐNG ĐIỀU KHIỂN CỦA MÁY CNC.. 64
1.1 Khái niệm điều khiển số NC (Numerical Control)64
1.2 Phân loại hệ thống điều khiển trong máy công cụ điều khiển số. 64
2. SƠ ĐỒ CẤU TRÚC HỆ ĐIỀU KHIỂN CNC.. 67
2.1 Cụm vi xử lý. 67
2.2 Phần mềm của hệ thống điều khiển số. 68
Chương 2
THIẾT KẾ PHẦN CỨNG HỆ THỐNG ĐIỀU KHIỂN.. 69
1. Mạch điều khiển động cơ bước. 69
1.1. Mạch sử dụng vi điều khiển. 69
1.2 Mạch sử dụng các IC Logic. 70
1.3. Sử dụng các driver điều khiển động cơ bước bán sẵn trên thị trường. 70
2 CẤU TẠO DRIVER 2-PHASE UDK2120. 71
2.1 Tên gọi và chức năng các bộ phận của driver71
2.4. Tín hiệu vào/ra. 73
3. SƠ ĐỒ NỐI DÂY.. 74
4. NGUỒN CẤP. 74
5. CỔNG GIAO TIẾP VỚI MÁY TÍNH.. 75
5.1 Cổng nối tiếp (Serial Port hay COM Port)75
5.2. Cổng song song (LPT Port hay Parallel Port)79
Chương 3
PHẦN MỀM ĐIỀU KHIỂN.. 84
3.1 GIỚI THIỆU VỀ PHẦN MỀM MACH3. 84
3.1.1.Tính năng cơ bản và chức năng cung cấp bởi Mach3:84
3.1.2 Vấn đề cần giải quyết khi áp dụng vào thực tế :84
3.2 CÁCH XÁC LẬP THÔNG SỐ TRONG PHẦN MỀM MACH3. 85
3.2.1.Xác lập các chân vào ra của cổng máy in cho phù hợp với mạch điều khiển.85
3.2.2 Xác lập đơn vị đo của motor tuning:90
3.2.3 Xác lập thông số cho các trục.91
a) Các trục tịnh tiến X, Y, Z:91
b) Trục xoay phôi A:93
3.2.4.Các nút cơ bản và thông dụng trên giao diện của Mach 3.95
3.3 CÁC CHỨC NĂNG CỦA PHẦN MỀM MACH3. 97
3.3.1 Chạy một file Gcode. 97
3.3.2 Nhập một đoạn G-code bằng tay. 97
3. 4 HƯỚNG DẪN CƠ BẢN SỬ DỤNG PHẦN MỀM CORELDRAW X5 VÀ DOTG 98
3.5 Giới thiệu phần mềm.. 103
3.5.1 Hướng dẫn sử dụng phần mềm Dotg. 111
3.6 Hướng dẫn tao gcode gia công chữ thư pháp bằng MastercamX.. 113
CHƯƠNG 4 : HƯỚNG DẪN SỬ DỤNG VÀ BẢO DƯỠNG MÁY
4.1 Hướng dẫn sử dụng……………………………………………………….118
4.2 Bảo dưỡng máy…………………………………………………………...120
Phần D: KẾT LUẬN VÀ KIẾN NGHỊ
1.Kết quả đạt được:121
1.1 Kết quả chưa đạt được:121
2.Kiến Nghị121
LỜI CẢM ƠN.. 122
TÀI LIỆU THAM KHẢO.. 123
Như chúng ta đã biết, ngành chế tạo máy là một trong những ngành công nghiệp chủ yếu sản xuất ra máy móc và các công cụ, thiết bị quan trọng khác, là một trong số chỉ tiêu đánh giá sự tiến bộ khoa học kỹ thuật của một quốc gia. Mức độ phát triển, khối lượng nhịp độ, cơ cấu ngành chế tạo máy ảnh hưởng đến chỉ tiêu sản xuất của xã hội. Đảng và Nhà nước ta cũng đã khẳng định ngành cơ khí chế tạo máy là một trong những ngành công nghiệp mũi nhọn trong quá trình công nghiệp hoá, hiện đại hoá đất nước.
Nâng cao hiệu quả sản xuất, hàm lượng công nghệ, khoa học trong mỗi sản phẩm là con đường chính để phát triển kinh tế đất nước trong những năm tới đây cũng như trong tương lai. Vì vậy, việc áp dụng thành tựu khoa học công nghệ vào sản xuất, sử dụng máy móc, thiết bị có năng suất cao, khả năng công nghệ đa dạng, áp dụng linh hoạt trong các hệ thống sản xuất khác nhau cũng như áp dụng những phương pháp điều khiển hiện đại trong các dây chuyền tự động hóa…là vấn đề quan trọng, cấp bách hiện nay để nước ta hướng đến một nền công nghiệp sản xuất tiên tiến, mức độ tự động hóa, cơ khí hóa cao, để trở thành nước công nghiệp phát triển theo hướng bền vững.
Máy CNC (Computerized Numeric Control) ra đời là một trong những thành tựu khoa học, kỹ thuật của nhân loại và nó ngày càng được ứng dụng rộng rãi trong sản xuất. Máy CNC đã góp phần không nhỏ vào việc giải quyết nhiệm vụ cấp bách hiện nay là tự động hoá quá trình sản xuất, nó được ứng dụng rộng rãi từ hệ thống sản xuất hàng khối cho đến sản xuất đơn chiếc và các hệ thống sản xuất linh hoạt.
Tuy nhiên, hiện nay ở Việt Nam, việc nghiên cứu, chế tạo và áp dụng vào sản xuất các máy này gặp rất nhiều hạn chế. Đa phần chỉ ở các doanh nghiệp chế tạo khuôn mẫu với quy mô sản xuất lớn và các trường Đại học, Cao Đẳng kỹ thuật mới sử dụng đến máy CNC.
Máy khắc laser tự động là một dạng của máy CNC, do đó chúng em cho ra đời máy khắc laser tự động trong thời điểm này là hoàn toàn hợp lý. Nó không những giúp em tìm tòi nghiên cứu, am hiểu và dần dần làm chủ kiến thức lĩnh vực này trong tương lai mà còn giúp sinh viên chuyên ngành cơ khí chế tạo máy và các ngành có liên quan trong các trường Đại học, Cao đẳng có điều kiện học tập, nghiên cứu và phát triển nó ngày càng hoàn thiện hơn. Đây chính là lý do em chọn đề tài Tốt nghiệp này.
¯&¯
CHƯƠNG MỞ ĐẦU
1. ĐẶT VẤN ĐỀ
Hiện nay, khoa học công nghệ ngày càng phát triển, thế giới cũng vừa trải qua cuộc khủng hoảng kinh tế trầm trọng đã gây ảnh hưởng không nhỏ đến nền công nghiệp toàn cầu. Chính vì thế, việc ứng dụng các kĩ thuật tiên tiến vào sản xuất nhằm tạo ra những sản phẩm có năng suất, chất lượng cao, giá thành thấp nhận được ngày càng trở nên cấp thiết, đặc biệt đối với những nước đang phát triển.
Thị trường ngày càng xuất hiện nhiều chủng loại và mẫu mã hàng hóa, thay đổi thường xuyên. Để giải quyết những yêu cầu về sự đa dạng này thì giải pháp máy CNC là phù hợp.
Ở Việt Nam, máy CNC đã được đưa vào sử dụng ở các xí nghiệp dân sự và quốc phòng nhưng chưa phổ biến. Gần đây, phong trào chế tạo máy CNC (Homemake CNC) đang được nhiều bạn sinh viên cũng như kỹ sư quan tâm. Tuy nhiên vẫn còn gặp rất nhiều hạn chế. Do đó, để cập nhật đựơc kiến thức về máy CNC đồng thời giúp cho các sinh viên hiểu nhiều hơn về máy CNC chính là lý do ra đời của đề tài “Thiết kế và chế tạo máy khắc laser tự động”.
Sự ra đời của đề tài còn do sự ham thích tìm hiểu về máy CNC, sự say mê tìm hiểu cách thức hoạt động, các cơ cấu bộ phận của máy CNC và đây cũng là cơ hội để người nghiên cứu ôn lại các kiến thức tổng quát đã được học về công nghệ chế tạo máy.
2. GIỚI HẠN ĐỀ TÀI
Vì điều kiện cơ sở vật chất, trang thiết bị và thời gian bị còn hạn chế nên chúng em chỉ tập trung tính toán và hoàn thành một máy khắc laser tự động minicơ bản có thể hoạt động được, còn rất nhiều vấn đề khác cần phải hoàn thiện thêm.
Do kinh phí để chế tạo hạn hẹp nên không thể sử dụng được hết những chi tiết, cơ cấu hiện đại, như động cơ Servo xoay chiều, đầu laser công xuất lớn…..
Kiến thức còn hạn chế nên chúng em gặp rất nhiều khó khăn trong việc tiếp cận và lĩnh hội thông tin về đề tài.
3. MỤC ĐÍCH NGHIÊN CỨU
Đề tài được cho ra đời nhằm mục đích giúp sinh viên có điều kiện tiếp cận nhiều hơn với máy CNC.
Đề tài cũng còn là cơ hội cho người nghiên cứu tiếp xúc và hiểu rõ hơn về máy CNC, có dịp tổng hợp lại một số kiến thức đựơc học trong những năm qua.
Việc nghiên cứu còn là cơ sở giúp cải tiến khả năng công nghệ của một số máy truyền thống, hay phục hồi, sửa chữa một số máy CNC cũ nhằm tiết kiệm chi phí cho quá trình sản xuất.
Về lâu dài đề còn là tài liệu tham khảo cho các sinh viên chuyên ngành chế tạo máy, là cơ sở cho việc phát triển các đề tài sau này.
4. CƠ SỞ LÝ LUẬN
Việc tính toán thiết kế các bộ phận của máy hoàn toàn dựa vào lý thuyết của môn học máy cắt kim loại, môn sức bền vật liệu, vẽ kỹ thuật. Vậy cơ sở tính toán thiết kế bao gồm các chỉ tiêu sau:
- Chỉ tiêu độ bền.
- Chỉ tiêu độ chính xác.
- Chỉ tiêu về tính công nghệ.
Để đảm bảo các chỉ tiêu trên người thiết kế dùng các phương pháp sau đây:
- Phương pháp tham khảo tài liệu: nghiên cứu, tìm cách ứng dụng các công thức, phương trình để tính toán, kiểm tra độ bền của các chi tiết, bộ phận máy.
- Phương pháp phân tích: sử dụng các kiến thức với sự trợ giúp của máy tính để tính toán thiết kế, sử dụng các phần mềm để tính toán thiết kế. Đây là phương pháp cho độ chính xác tương đối cao, thời gian nhanh.
Vì vậy để quá trình thiết kế được tốt thì cần có sự dung hòa giữa hai phương pháp này.
Chương 1
TỔNG QUAN VỀ MÁY CNC
1. GIỚI THIỆU CHUNG VỀ MÁY CNC
1.1 Khái niệm
Máy CNC (Computer Numerical Controlled ) là máy công cụ, điều khiển theo một chương trình định sẵn. Các dữ liệu được cung cấp dưới dạng những lệnh.
1.2 Lịch sử phát triển của hệ thống máy CNC
Năm 1949
- Mẫu đầu tiên của máy NC do MIT (Viện công nghệMassachusetts) thiết kế và chế tạo theo đặt hàng của Không lực Hoa kỳ, để sản xuất các chi tiết phức tạp và chính xác của máy bay.
Năm 1952
- Chiếc máy phay đứng 3 trục điều khiển số của hãng Cincinnati Hydrotel được trưng bày tại MIT.
Năm 1960
- Máy NC được sản xuất và sử dụng trong công nghiệp.
- Các bộ điều khiển số đầu tiên dùng đèn điện tử nên tốc độ xử lý chậm, cồng kềnh và tiêu tốn nhiều năng lượng.
- Chương trình được chứa trong các băng và bìa đục lỗ, khó hiểu và không sửa chữa được.
- Giao tiếp người - máy rất khó khăn vì không có màn hình, bàn phím.
Năm 1970
- Các linh kiện bán dẫn được sử dụng phổ biến trong công nghiệp
- Máy NC gọn hơn, tốc độ xử lý cao hơn, tiêu tốn ít năng lượng hơn,...
- Các băng đục lỗ sau này được thay bằng băng hoặc đĩa từ,...
- Tính năng sử dụng của các máy NC vẫn chưa được cải thiện đáng kể, cho đến khi máy tính được ứng dụng.
CNC = Computer Numerical Control
Đầu 1970’s, máy CNC ra đời:
- Các bộ điều khiển số trên máy công cụ được tích hợp máy tính và thuật ngữ CNC ra đời.
Máy CNC ưu việt hơn máy NC thông thường về nhiều mặt
- Tốc độ xử lý cao, kết cấu gọn,...
- Ưu điểm quan trọng nhất của chúng là ở tính năng sử dụng, giao diện với người dùng và các thiết bị ngoại vi khác.
Các máy CNC ngày nay
- Có màn hình, bàn phím và nhiều thiết bị khác để trao đổi thông tin với người dùng.
- Nhờ màn hình, người dùng được thông báo thường xuyên về tình trạng của máy, cảnh báo báo lỗi và nguy hiểm có thể xảy ra, có thể mô phỏng để kiểm tra trước quá trình gia công,...
- Có thể làm việc đồng bộ với các thiết bị sản xuất khác như robot, băng tải, thiết bị đo,... trong hệ thống sản xuất.
- Có thể trao đổi thông tin trong mạng máy tính các loại, từ mạng cục bộ (LAN) đến mạng diện rộng (WAN) và Internet.
Hiện nay máy công cụ CNC đang được phát triển và ứng dụng rộng rãi vào nhiều lĩnh vực cuộc sống nhiều nước trên thế giới. Cùng với sự phát triển vượt bậc của công nghệ vi xử lý, trung tâm điều khiển của máy CNC hiện đại được điều khiển bởi bộ vi xử lý. Nhờ tốc độ xử lý của các phần tử này mà nhịp độ làm việc của các máy CNC được ghép với chúng không bị thay đổi. Có thể coi sự ra đời của máy CNC là một cuộc cách mạng lớn trong lĩnh vực cơ khí chế tạo máy, đó là một phần tử vô cùng quan trọng trong hệ thống sản xuất linh hoạt. Nó góp phần thúc đẩy quá trình tự động hóa nhằm dần dần thay thế vai trò của con người trong quá trình sản xuất.
1.3 Những đặc điểm cơ bản của máy CNC
Khả năng tự động hoá cao.
Năng suất gia công cao, thời gian phụ ( thay dao, chạy không, …) giảm.
Khả năng đạt độ chính xác cao, tính ổn định cao.
Có khả năng tập trung nguyên công cao, khả năng gia công nhiều bề mặt trong cùng một lần gá.
So với máy điều khiển tự động theo chương trình cứng (cam, cữ hành trình, trục gài bi…) máy CNC có tính linh hoạt cao trong việc lập trình, tiết kiệm được thời gian điều chỉnh máy đạt được tính chính xác cao ngay cả với sản xuất hàng loạt nhỏ.
Một ưu điểm nổi bậc khác chỉ có trong máy CNC đó là phương thức làm việc với hệ thống xử lý thông tin “điện tử – số hóa”. Phương thức này cho phép nối ghép với hệ thống xử lý số trong phạm vi quản lý xí nghiệp. Đồng thời cũng tạo điều kiện cho việc ứng dụng các kỹ thuật quản lý hiện đại thông qua mạng liên kết cục bộ ( LAN) hay mạng liên thông (WAN).
Máy công cụ CNC tuy có được nhiều ưu điểm so với máy vạn năng nhưng cũng còn có nhược điểm là:
+ Không thích hợp với việc gia công những chi tiết đơn giản.
+ Chi phí cho việc mua sắm trang thiết bị quá cao.
+ Đòi hỏi người thợ đứng máy phải có một kiến thức tương đối rộng cả về cơ khí, lẫn điện tử khi tiến hành gia công.
2. CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN TRÊN MÁY CNC
2.1 Điều khiển 2D
Với điều khiển 2D hai trục có thể điều khiển đồng thời. Do vậy các dịch chuyển của dụng cụ có thể thực hiện theo đường thẳng và dạng tròn trên cùng một mặt phẳng.
Ví dụ: một máy khắc laser CNC 3 trục, điều khiển 2D,nghĩa là, các biên dạng có thể phay theo hai trục còn trục thứ ba phải được tiến dao đặc biệt độc lập với hai trục kia.
2.2 Điều khiển 21/2 D
Điều khiển 21/2D tạo ra các chuyển động của dụng cụ cắt trong nhiều mặt phẳng, bằng cách nội suy chuyển đổi giữa một trong ba mặt phẳng chính.
Tất cả 3 trục được điều khiển trong điều khiển 21/2D tuy nhiên trong mỗi mặt phẳng luôn luôn chỉ có hai trục được điều khiển đồng thời. Trục thứ ba gọi là trục tiến dao.
Tuỳ thuộc vào mặt phẳng gia công được chọn mà các trục khác nhau được điều khiển đồng thời. Do vậy, các chuyển động có thể có các mặt phẳng sau:
-Mặt phẳng X/Y
-Mặt phẳng X/Z
-Mặt phẳng Y/Z
2.3 Điều khiển 3D
Ba trục được nội suy đồng thờitrong điều khiển 3D, nhờ đó các chuyển động của dụng cụ cắt được thực hiện trong không gian theo kích thước 3 chiều.
Qua đó có khả năng gia công được các biên dạng phức tạp, ví dụ như chế tạo dao cắt, chế tạo khuôn mẫu gia công trong một lần kẹp.
Ngày nay hầu hết các máy công cụ được điều khiển bằng 3D.
3. CẤU TRÚC TỔNG THỂ MÁY CNC
Máy CNC gồm có hai phần chính như sau:
Cấu trúc tổng thể máy CNC
3.1 Phần điều khiển
Phần điều khiển của máy CNC gồm chương trình điều khiển và thiết bị điều khiển:
+ Chương trình điều khiển: là tập hợp các tín hiệu để điều khiển máy được mã hóa các chữ cái, số và một số ký hiệu khác (cộng, trừ, chấm, gạch nghiêng). Chương trình này được ghi vào cơ cấu mang chương trình dưới dạng mã số (mã thập phân, nhị phân, bảng đục lỗ).
+ Cơ cấu điều khiển: có nhiệm vụ nhận tín hiệu từ cơ cấu đọc chương trình, thực hiện các biến đổi cần thiết để điều khiển được cơ cấu chấp hành và kiểm tra sự hoạt động của cơ cấu chấp hành thông qua các cảm biến liên hệ ngược. Cơ cấu điều khiển gồm: cơ cấu giải mã, cơ cấu chuyển đổi, bộ xử lý tín hiệu, cơ cấu nội suy, cơ cấu so sánh, cơ cấu khuếch đại, cơ cấu hành trình, cơ cấu đo vận tốc các thiết bị xuất nhập tín hiệu.
3.2 Phần chấp hành
"LASER" viết tắt của "Light Amplification by Stimulated Emission of Radiation", Laser là sự khuếch đại ánh sáng bằng phát xạ kích thích. Bức xạ laser được tạo ra từ một bộ nguồn laser. Hiện nay hai loại laser nguồn thông dụng là laser tinh thể bán dẫn và laser khí. Nguồn laser có thể được kích hoạt bằng ánh sáng (đèn chớp hoặc diot) hoặc điện thế. Tinh thể laser hoặc khí được đặt giữa hai gương cho phép cộng hưởng và định hướng chùm tia laser. Một tỉ lệ xác định của chùm tia laser được truyền qua gương phản xạ bán toàn phần và nó có thể dùng để gia công vật liệu. (Phạm vi viết tại đây được tập trung cho ứng dụng gia công vật liệu trong khi laser có rất nhiều ứng dụng khác như trong công nghệ quân sự, viễn thông, đo lường, y tế do các đặc điểm tuyệt vời của loại bức xạ này)
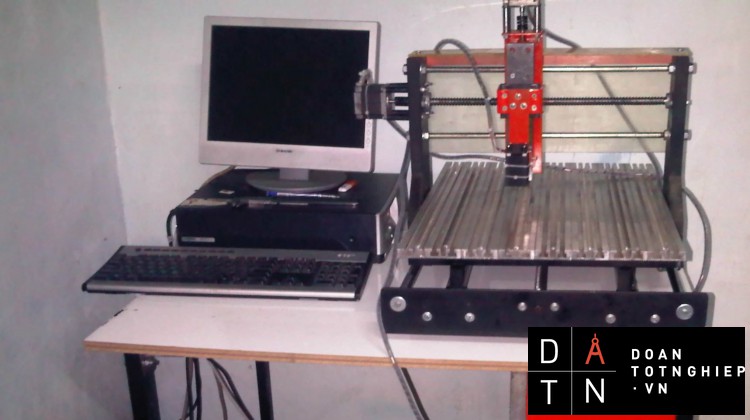
Do cải tiến tiến từ máy phay cnc 3 trục mini gia đình nên hệ thống động cơ phay được thay thế bằng đầu khắc laser, kết nối tín hiệu chung cới trục z, theo cơ cấu gần giống máy cắt cnc plasma.
Thông số của đầu laser: đầu khắc laser bán dẫn phát ra tia laser màu xanh dương bước sóng 445nm, công suất thật 2000mw ( 2w) , dùng trong thí nghiệm, gắn vào máy CNC khắc gỗ, vải, da...
4. HỆ TRỤC TỌA ĐỘ TRÊN MÁY CNC
Theo tiêu chuẩn ISO, các chuyển động cắt gọt khi gia công trên máy CNC phải nằm trong hệ tọa độ Descarte theo nguyên tắc bàn tay phải:
+ Đặt ngửa bàn tay phải lên bàn máy với phương chiều các ngón tay như hình vẽ, chiều ngón giữa là chiều trục Z, ngón trỏ là chiều trục Y, ngón cái là chiều trục X.
+ Trong hệ tọa độ này có 6 chuyển động: 3 chuyển động tịnh tiến theo 3 trục và 3 chuyển động quay theo 3 trục.
+ Trục Z: tương ứng với trục chính của máy CNC, có chiều dương là chiều mà theo đó khoảng cách giữa dao và chi tiết tăng dần.
+ Trục X: là chuyển động tịnh tiến lớn nhất của máy CNC.
Ví dụ: Trên máy phay là chuyển động dọc trục, trên máy tiện là chuyển động theo phương ngang. Cũng tương tự như trục Z, chiều cũng là chiều làm tăng khoảng cách giữa dao và chi tiết gia công.
+ Trục Y: là trục mà tự nó cùng với hai trục trên làm thành một hệ trục toạ độ.
Ví dụ: trên máy phay là chuyển động chạy dao ngang. Trên máy tiện không có trục này (cho dạng chi tiết là tròn xoay).
Một lưu ý quan trọng khi xét hệ trục tọa độ của một máy CNC thì phải coi chi tiết đứng yên, còn dao chuyển động theo các phương của hệ trục tọa độ.
Trong quá trình làm việc, để gia công được trên máy CNC thì hệ tọa độ của máy phải được xác định. Nói cách khác vị trí của hệ tọa độ phải được xác định so với một số điểm cố định nào đó mà người ta gọi là điểm chuẩn.
Trong một máy CNC gồm có các điểm chuẩn sau đây:
+ Chuẩn M (Machine Datum Point): là chuẩn máy. Máy sẽ đo lường từ vị trí này đến vị trí khác khi làm việc.
+ Chuẩn R (Reference Point): đây là chuẩn qui định trên máy, thường là vị trí thay dao.
+ Chuẩn T (Tool offset): chuẩn dao.
+ W ( Work Datum Point): chuẩn chi tiết.
+ P ( Program Datum Point): chuẩn thảo chương
- Vị trí và ứng dụng của các chuẩn này thể hiện ở bảng sau:
|
Chuẩn |
Vị trí và đặc tính |
Ứng dụng |
|
M |
Không thể thay đổi Gốc của hệ thống tọa độ máy |
Dùng làm chuẩn đo lường khi máy làm việc |
|
R |
Do dao cắt không thể đi tới được điểm gốc tọa độ máy, nên người thiết kế máy ấn định điểm này để dao cắt có thể di chuyển tới một cách dễ dàng Không thể thay đổi được |
Dùng để thay thế chuẩn máy, thường là vị trí thay dao khi có ổ chứa dao và thay dao tự động
|
|
T |
Là điểm chuẩn của dụng cụ cắt. Do người thiết kế qui định. Không thể thay đổi được |
Dùng để xác định vị trí dao cắt sau khi lắp dao vào ổ dao
|
|
W |
Là gốc của hệ toạ độ của chi tiết gia công, có thể thay đổi |
Dùng làm gốc của hệ toạ độ làm việc trong quá trình gia công |
|
P |
Là gốc của hệ toạ độ lập trình Có thể thay đổi theo ý muốn của người lập trình |
Dùng làm gốc của hệ tọa độ trong quá trình soạn thảo chương trình. |
( Trên đây là những điểm chuẩn của máy cnc chuyên nghiệp, máy của nhóm chỉ là dạng mô hình nên chưa đạt được tất cả các điểm trên)
5. PHÂN LOẠI MÁY
- Máy mini
- Máy công xuất lớn
- Máy sử dụng truyền động đai
- Máy sử dụng truyền động vitme
…..
6. GIỚI THIỆU CHUNG VỀ MÁY LASER TỰ ĐỘNG
Trên thị trường hiện nay có rất nhiều các loại máy ứng dụng công nghệ laser, với nhiều hãng sản xuất nổi tiếng trên thế giới, trong đó có việt nam. Với nhiều kiểu dáng khác nhau, ngoài những máy có tên tuổi thì những máy tự chế cũng được sử dụng rộng rãi
6.1 Những Máy Của Hãng Sản Xuất
Một số máy của các hãng nước ngoài:
Máy laser dùng cắt khắc vật liệu phi kim như: Sừng, Gỗ, Nhựa, Tre Nứa, Thủy Tinh, Pha lê, Đá cảm thạch, MDF, Da, Cao su...
Chủ yếu được sử dụng cho những món quà nhỏ. Chẳng hạn như: Làm mô hình, khắc chân dung, phù hiệu, phù hiệu, quà tặng, khắc bao bì, con dấu…
Thông số kỹ thuật máy laser 3020 / máy laser 2030:
Công suất bóng laser: 30W/40W
Điện áp: AC220 ± 10% / 50Hz
Phạm vi làm việc: 200mmx300mm
Tốc độ khắc: 400mm / s
Độ chính xác: <0.05mm
Khắc sâu: 0-10mm (Tùy thuộc vật liệu)
Nhiệt độ hoạt động: -5 ℃ -65 ℃
Làm mát: Bằng nước
Giao thức kết nối: giao diện USB
Môi trường hệ thống: Windows XP/7/8
Máy khắc laser EASY OPEN là phiên bản không có thùng kín của máy khắc laser EASY
.....................................
Chương 2
CÁC PHƯƠNG ÁN CHO MÔ HÌNH THIẾT KẾ
1. PHƯƠNG ÁN CHO CHUYỂN ĐỘNG CỦA MÁY
1.1. Phương án 1 ( phôi di chuyển)
- Trong phương án này, đầu laser thực hiện chuyển động tịnh tiến theo phương Z ( Trục chính dịch chuyển theo phương Z ).
- Chuyển động chạy theo cả hai phuơng X,Y được thực hiện bởi hai động cơ riêng lẽ.
( Hình mô phỏng phương án 1)
1.1.1 Ưu diểm của phương án 1
Phương án này cần không gian đặt máy nhỏ hơn (với máy có cùng kích thước).
Động cơ chạy dao theo phương Z có công suất nhỏ hơn so với động cơ chạy dao theo phương Z trong phương án 1( đặc biệt khi gia công những chi tiết có trọng lượng lớn).
1.1.2 Nhược điểm của phương án 1
Độ cứng vững của máy không đựơc cao
1.2 Phương án 2 ( phôi đứng yên)
Trong phương án này, bàn máy đứng yên, đầu máy thực hiện chuyển động chạy dao theo phương X, Y, Z nhờ các động cơ riêng lẽ.
Đây còn gọi là máy kiểu Router.
Hình mô phỏng phương án 2
1.2.1 Ưu diểm của phương án 2
Ưu điểm: có tính đa năng, không gian làm việc lớn, có thể thiết kế cải tiến thêm trục A đặt cố định trên bệ máy để có thể tiện phay kết hợp, do đó có thể nâng cấp lên thành một trung tâm CNC nhiều trục, nhiều tính năng.
Động cơ chạy dao theo các phương có công suất nhỏ, không bị ảnh hưởng bởi trọng lượng vật gia công..
1.2.2 Nhược điểm của phương án 2
Nhược điểm: chi phí chế tạo máy cao do đòi hỏi độ cứng vững của các trục di động. thiết kế lắp ráp khó khăn.
2. CHỌN PHƯƠNG ÁN CHO CHUYỂN ĐỘNG
Sau khi nghiên cứu các phương án cho mô hình, ta chọn phương án thứ 2 làm làm phương án cho mô hình vì:
- Đề tài nghiên cứu chỉ ở mức là mô hình phục vụ cho giảng dạy, học tập.
- Đảm bảo độ cứng vững cũng như kích thước đơn giản của máy.
- Dễ chế tạo trên các mô hình cũ sẵn có.
3. CÁC PHƯƠNG ÁN TRUYỀN ĐỘNG CỦA MÁY
3.1 Vít Me Đai Ốc Thường
( Hình minh họa)
Vít me được gắn đồng trục với động cơ thông qua khớp nối mền, khi động cơ quay, vít me quay. Động cơ và vít me gắn cố định làm cho đai ốc di chuyển dọc trục vít me. Đai ốc thì được gắn chặt vào bộ phận cần chuyển động, (trục X Y Z) tốc độ di chuyển phụ thuộc vào tốc độ động cơ và bước ren của trục vít, một vòng quay của động cơ sẽ làm cho đai ốc dịch chuyển một đoạn bằng bước ren của truc vít, vì vậy tốc độ di chuyển của bộ phận trượt ở phương án này là chậm và có độ chính xác khi chuyển động không cao vì có độ rơ của đai ốc. Dùng động cơ có bước góc càng nhỏ thì độ chính xác di chuyển càng cao.
Một số ưu điểm khác là tạo ra lực đẩy lớn khi gia công chi tiết. phương án này dùng trong các máy công nghiệp gia công các loại vật liệu cứng có kích thước lớn…
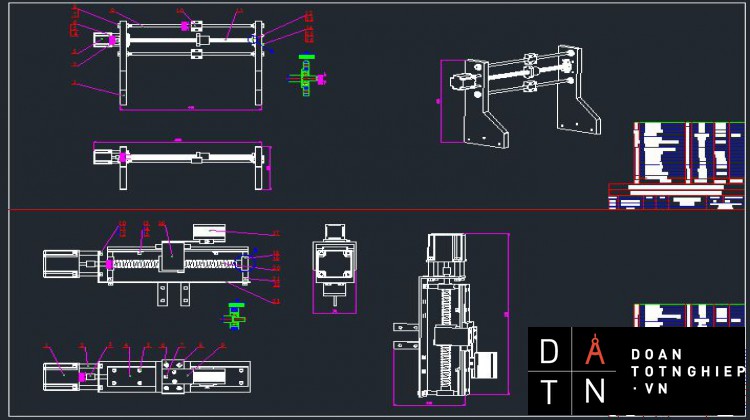
3.2 Vít Me Đai Ốc Bi
Đây là dạng vít me đai ốc thay vì ma sát trượt thông thường thì đây là tiếp xúc giữa vít me và đai ốc thông qua các viên bi được chuyển thành ma sát lăn. Điều này đem đến một ưu điểm lớn: chỉ cần một lực quay rất nhỏ đã có thể làm cho đai ốc chuyển động.
Độ chính xác di chuyển cao do không có độ rơ giữa vít me và đai ốc.
( Hình 14: Bộ truyền vít me – đai ốc bi có rãnh hồi bi dạng ống )
Trên đây là kết cấu bộ truyền vít me- đai ốc bi. Tuy có kết cấu đa dạng nhưng các thành phần chủ yếu của bộ truyền bao gồm : vít me 1, đai ốc 2, các viên bi 3,và rãnh hồi bi 4.
Vấn đề quan tâm trong bộ truyền vít me – đai ốc bi đó là dạng profin răng vít me và đai ốc .Profin răng vít me dạng chữ nhật và hình thang là chế tạo dễ dàng hơn cả nhưng khả năng chịu tải kém.Để tăng khả năng chịu tải , người ta tăng bề mặt làm việc của bộ truyền bằng cách chế tạo profin dạng tròn.
Một vấn đề cũng rất quan trọng trong kết cấu của bộ truyền đó là kết cấu của ranh hồi bi: rãnh hồi bi có thể là dạng ống, hoặc dạng theo lỗ khoan trong đai ốc hoặc là dạng rãnh hồi bi giữa hai vòng ren kế tiếp.
- Rãnh hồi bi dạng ống có nhược điểm là tăng kích thước bộ truyền , độ bền mòn của đầu ống thấp , kẹp chặt ống có độ tin cậy không cao.
- Rãnh hồi bi theo lỗ khoan trên đai ốc có ưu điểm là kết cấu gọn và tính công nghệ tốt song khả năng tách thành nhiều nhóm hồi bị khó khăn.
- Rãnh hồi bi giữa hai vòng ren kế tiếp : là dạng hồi bi được dùng nhiều hơn cả do có kích thước gọn nhất , không bị mòn nhanh, độ tin cậy cao và chiều dài rãnh hồi
3.3 Truyền Đai
( Hình minh họa)
( Hình minh họa)
Hai đầu của đai được đặt vừa vào hai puli có cùng kích thước răng với đai. Một cái bắt chặt vào trục động cơ, cái còn lại bắt chặt vào trục quay tự do ở phía dọc theo chiều của trục được dẫn động. Một phần của đai được gắn chặt với bộ phận của phần trượt. Khi động cơ quay toàn bộ đai dịch chuyển và kéo theo các bộ phận đó di chuyển.
Tốc độ di chuyển phụ thuộc vào tốc độ động cơ và đường kính của puli. Một vòng của trục động cơ sẽ làm bộ phận trượt di chuyển một đoạn bằng với chu vi của puli (thường là 20-30mm). Rõ ràng phương án này tốc độ di chuyển nhanh hơn rất nhiều nhưng đổi lại, độ chính xác di chuyển sẽ thấp có thể có những sai lệch khi gia công và không chịu được rung do lực cắt sinh ra, lực đẩy nhỏ nên khi gặp tải lớn sẽ bị trượt bước hoặc giãn đai.
4. KẾT LUẬN
Chọn phương án gá phôi cố định dùng vít me đai ốc bi làm cơ cấu truyền chuyển động cho các trục. nhóm quyết định chọn phương án này vì thiết kế cơ khí đơn giản, hệ thống cứng vững hơn, đảm bảo được các yêu cầu một máy CNC ở mức độ mô hình ứng dụng học tập.
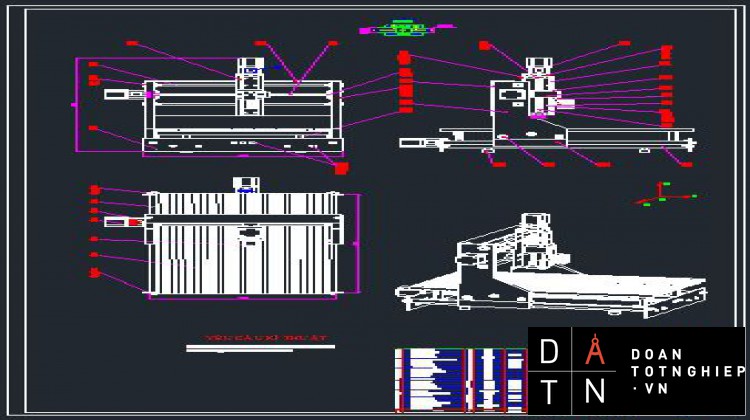
5. CÁC THÔNG SỐ KỸ THUẬT CHO MÁY
- Lượng dịch chuyển theo phương X: Sd = 350 mm.
- Lượng dịch chuyển theo phương Y: Sn = 450 mm.
- Lượng dịch chuyển theo phương Z: Sd = 150 mm.
- Công xuất đầu laser 2w
¯&¯
Chương 3
CÁC LOẠI ĐỘNG CƠ ĐƯỢC SỬ DỤNG TRONG MÁY CNC
1. YÊU CẦU KỸ THUẬT CỦA ĐỘNG CƠ CHẤP HÀNH ( ĐCCH) TRONG MÁY CNC
1.1 Vai trò của động cơ chấp hành trong máy CNC
Trong hệ thống máy CNC, ĐCCH đóng một vai trò cực kì quan trọng, đây là nguồn năng lượng thiết yếu cho sự hoạt động của máy.
Mặc khác trong động cơ máy CNC, bất cứ mỗi chuyển động của máy như trục chính, bàn xe dao, tay máy thay, bôi trơn, làm nguội đều được điều khiển bởi một ĐCCH. Nhờ đó mà kết cấu cơ khí gọn nhẹ, đơn giản.
1.2 Yêu cầu kỹ thuật của động cơ chấp hành trong máy CNC
Trong máy CNC, ĐCCH thường làm việc ở dạng khởi động, dừng máy hoặc đảo chiều quay, đây là điều kiện làm việc “khắc nghiệt” của động cơ. Vì vậy động cơ cần có những yêu cầu sau:
– Không có hiện tượng tự quay, tự hãm khi ngắt tín hiệu điều khiển.
– Đặc tính cơ và đặc tính điều khiển là phi tuyến.
– Làm việc ổn định trong dãy tốc độ làm việc.
– Momen khởi động lớn.
– Tác động nhanh.
– Công suất điều khiển nhỏ.
– Dễ điều khiển vô cấp.
– Dãy điều khiển tốc độ rộng.
– Điện áp khởi động nhỏ.
– Độ tin cậy cao.
– Kích thước, trọng lượng nhỏ.
2. GIỚI THIỆU MỘT SỐ ĐCCH TRONG MÁY CNC
2.1 Động cơ chấp hành một chiều
.................................
Chương 1
TỔNG QUAN HỆ THỐNG ĐIỀU KHIỂN
1. TỔNG QUAN VỀ HỆ THỐNG ĐIỀU KHIỂN CỦA MÁY CNC
1.1 Khái niệm điều khiển số NC (Numerical Control)
Là hệ thống điều khiển đặc trưng bởi các đại lượng đầu vào là những tín hiệu số nhị phân, chúng được đưa vào hệ điều khiển dưới dạng một chương trình điều khiển có hệ thống. Trong hệ điều khiển số ứng dụng cho điều khiển máy công cụ, các đại lượng đầu vào là những thông tin, dữ liệu hay số liệu nạp vào.
1.2 Phân loại hệ thống điều khiển trong máy công cụ điều khiển số
Phân loại theo dạng điều khiển
- Điều khiển điểm.
- Điều khiển đường.
- Điều khiển theo biên dạng ( contour).
Phân loại theo cấu trúc điều khiển
- Điều khiển NC (Numerical Control)
- Điều khiến CNC (Computerized Numerical Control)
Phân loại theo kiểu điều khiển
- Hệ thống điều khiển hở
Hệ thống điều khiển hở là hệ thống điều khiển mà đường truyền dữ liệu chỉ có một chiều, nghĩa là không có phản hồi từ cơ cấu chấp hành về trung tâm điều khiển.Nó chỉ có thể áp dụng trong các trường hợp lực cản trên đường dịch chuyển là ổn định hoặc không đáng kể khi hệ thống làm việc, có thể dùng để điều khiển những cơ cấu chấp hành có độ nhạy, độ chính xác cao như động cơ bước với số bước cao cho một vòng quay của trục động cơ.
Sơ đố khối hệ thống điều khiển hở dùng động cơ bước
- Hệ thống điều khiển kín
Có tín hiệu phản hồi từ cơ cấu chấp hành về trung tâm điều khiển. Hệ thống phản hồi dùng để đo vị trí và tốc độ thực tế của trục và so sánh chúng với vị trí và tốc độ yêu cầu. Sự khác nhau giữa giá trị thực và giá trị yêu cầu là sai số, sai số này tác động lên hệ thống điều khiển làm cho hệ thống điều khiển tự động điều chỉnh lại tín hiệu điều khiển ở ngõ ra theo hướng sao cho sai số đó giảm xuống.
(Sơ đồ khối hệ thống điều khiển kín)
Hệ điều khiển CNC (Computerized Numerical Control)
Phân biệt hệ điều khiển NC và CNC
- Điều khiển NC (Numerical Control): thực hiện các hàm chức năng cơ bản bằng các mạch điện tử, muốn thay đổi cấu trúc điều khiển thì phải thiết kế lại mạch khác. Tín hiệu điều khiển dùng trong hệ NC là xung điện áp. Chức năng điều khiển được xác định chủ yếu bởi phần cứng.
- Điều khiến CNC (Computerized Numerical Control): Điều khiển CNC là một hệ điều khiển có thể lập trình và ghi nhớ. Nó bao gồm một máy tính cấu thành từ các bộ vi xử lý (microprocessor) kèm theo các bộ nhớ ngoại vi.
Đa số các chức năng điều khiển đều được giải quyết thông qua phần mềm nghĩa là các chương trình làm việc có thể được thiết lập trước.
Nhờ các chương trình hệ thống CNC mà các máy tính có thể sử dụng để thực hiện những chức năng điều khiển theo yêu cầu.
Do đó, các hệ điều khiển hiện đại có nguyên lý cấu trúc và xử lý dữ liệu theo dạng điều khiển CNC.
Đặc trưng cơ bản của hệ điều khiển CNC
- Nâng cao tính tự động.
- Nâng cao tính linh hoạt.
- Nâng cao tính tập trung nguyên công.
- Nâng cao tính chính xác và đảm bảo chất lượng gia công.
- Nâng cao hiệu quả kinh tế.
2. SƠ ĐỒ CẤU TRÚC HỆ ĐIỀU KHIỂN CNC
Hệ điều khiển máy CNC hiện nay được thiết kế để khi cần mở rộng hệ điều khiển thì có thể bổ sung thêm cho các chức năng đã có bằng mođun khác.Do đó hệ điều khiển được thiết lập thích hợp cho việc lắp đặt vào các phần mềm sử dụng các linh kiện điện tử hiện đại.
Cấu tạo phần cứng của điều khiển CNC
2.1 Cụm vi xử lý
Thực chất là hạt nhân của một thiết bị xử lý số, nó thực hiện các chức năng tính toán và điều khiển. Các phần tử chủ yếu của nó bao gồm:
- Bộ nhớ sơ bộ (truy nhập phụ trợ).
- Truy nhập cảnh báo.
- Bộ tích nhớ (Accumlator).
- Điều khiển thao tác lệnh.
- Truy nhập lệnh.
- Bộ nhớ xếp chồng.
2.2 Phần mềm của hệ thống điều khiển số
Phần mềm điều khiển là chương trình bao gồm nhiều khối liên hệ với nhau dùng để thực hiện các chức năng NC. Chức năng chính của phần mềm điều khiển là chấp nhận chương trình ứng dụng như là số liệu đầu vào và sinh ra tín hiệu để điều khiển dẫn động động cơ các trục.
Chương 2
THIẾT KẾ PHẦN CỨNG HỆ THỐNG ĐIỀU KHIỂN
1. Mạch điều khiển động cơ bước
1.1. Mạch sử dụng vi điều khiển
Ta có thể dùng các mạch đóng ngắt sử dụng chip như 8051, pic 16F877A… để điều khiển động cơ bước. Ví dụ bên dưới là sơ đồ mạch sử dụng vi điều khiển 8051
Nguyên lý điều khiển động cơ bước dùng vi điều khiển 8051
Ưu điểm: – Đa năng, điều khiển được nhiều loại động cơ bước khác nhau.
– Đơn giản, dễ chế tạo, giá thành rẻ.
Nhược điểm: – Vì điều khiển gián tiếp qua vi điều khiển nên đáp ứng chậm.
– Cần phải lập trình cho vi điều khiển, tương đối phức tạp.
− Tự chế tạo thủ công nên mạch có độ ổn định thấp.
1.2 Mạch sử dụng các IC Logic
Ví dụ sơ đồ mạch sử dụng IC logic
Nguyên lý điều khiển động cơ bước dùng các IC Logic
Ưu điểm:
– Đơn giản hóa việc điều khiển, chỉ cần 2 tín hiệu điều khiển là chiều quay DIR và xung cấp cho động cơ bước – STEP.
– Điều khiển trực tiếp nên đáp ứng nhanh.
Nhược điểm:
– Mạch tương đối phức tạp, giá thành cao.
– Không đa năng, mỗi loại động cơ bước khác nhau thì mạch IC logic cũng khác nhau.
1.3. Sử dụng các driver điều khiển động cơ bước bán sẵn trên thị trường
Ưu điểm: - Làm việc ổn định trong môi trường khắc nghiệt, kích thước gọn nhẹ.
- Đáp ứng nhanh, điều khiển trực tiếp qua máy tính dễ dàng.
Nhược điểm: - Khó tìm, giá thành cao.
- Phải có phần mềm để điều khiển các driver thông qua giao tiếp cổng COM hay LPT của máy tính.
Kết luận:
Chọn driver 2-phase UDK2120 của hãng VEXTA để điều khiển động cơ bước thông qua phần mềm KCAM 4.
Driver 2-phase UDK 2120 của VEXTA
2 CẤU TẠO DRIVER 2-PHASE UDK2120
2.1 Tên gọi và chức năng các bộ phận của driver
Sơ đồ vị trí các vùng chức năng của driver 2-phase UDK 2120
Driver này có tất cả 17 chân, chúng được chia thành 6 vùng như hình trên, gồm:
- Vùng Power Input Terminal: các chân để cấp nguồn cho driver hoạt động, nguồn cấp cho driver: AC 100/115V
- Vùng 1: đèn báo giám sát tín hiệu.
- Vùng 2: các vít điều chỉnh dòng điện.
- Vùng 3: các công tắc lựa chọn chức năng.
- Vùng 4: tín hiệu vào/ra.
- Vùng Motor Terminal: các chân ra để nối với động cơ bước.
Đèn báo giám sát tín hiệu:
|
Ký hiệu |
Màu |
Chức năng |
|
POWER |
Xanh |
Hiển thị tín hiệu nguồn. |
|
CW/PLS |
Xanh |
Xung CW, hiển thị xung vào, quay thuận chiều kim đồng hồ. |
|
CCW/DIR |
Xanh |
Xung CCW, hiển thị chiều quay ngược. |
|
C.OFF |
Xanh |
Tất cả tín hiệu vào đều tắt. |
|
TIMING |
Xanh |
Kích thích định thời hiển thị tín hiệu ra. |
|
O.H. |
Đỏ |
Hiển thị đầu ra quá nhiệt. |
2.2 Các công tắc điều chỉnh dòng điện
|
Kí hiệu |
Tên gọi & chức năng |
|
RUN |
Chiết áp dùng để điều chỉnh dòng điện vào động cơ bước. |
|
STOP |
Chiết áp điều chỉnh dòng để ngừng động cơ. |
2.3 Các công tắc lựa chọn chức năng
|
Kí hiệu |
Tên công tắc |
Chức năng |
|
ON/ACD |
Công tắc tự động giảm dòng |
Tự động giảm dòng ra đến motor khi motor dừng |
|
ON/ACO |
Công tắc tự động ngắt dòng |
Khi nhiệt độ bên trong driver tăng lên trên 900C, công tắc có chức năng tự động ngắt dòng đển motor. Chức năng này của driver có thể cài đặt và gỡ bỏ bởi công tắc này. |
|
F/H |
Công tắc điều chỉnh góc bước |
Điều chỉnh góc bước của motor: F (Full Step): 1.80/step; H (hafl step): 0.90/step |
|
2P/1P |
Công tắc trạng thái xung đầu vào |
Bộ ngắt mạch giữa 1-xung và 2-xung vào. |
|
N.O./N.C |
Công tắc tín hiệu logic đầu ra quá nhiệt |
Lựa chọn báo động logic khi quá nhiệt: N.O.: thường mở; N.C.: thường đóng |
2.4. Tín hiệu vào/ra
|
Vào/Ra |
Tên |
Chức năng |
|
Tín hiệu vào |
Tín hiệu xung CW |
Motor quay thuận chiều kim đồng hồ |
|
Tín hiệu xung CWW |
Motor quay ngược chiều kim đồng hồ |
|
|
Ngắt tất cả tín hiệu ra |
Ngắt dòng ra đển motor và cho phép trục động cơ được quay bởi tác động ngoại lực |
|
|
Tín hiệu ra |
Kích hoạt tín hiệu định thời |
Có tín hiệu ra khi kích hoạt tuần tự ở bước “0” |
|
Tín hiệu quá nhiệt |
Khi nhiệt độ bên trong driver tăng lên trên 900C, công tắc có chức năng tự động ngắt dòng đển motor.
|
3. SƠ ĐỒ NỐI DÂY
Sơ đồ nối dây từ driver đến cổng LPT
Kết nối tín hiệu vào/ra
Giữ tín hiệu vào V0 trong khoảng 5 VDC ÷ 24VDC. Khi V0 = 5VDC, ta không cần mắc điện trở R1, khi V0 > 5VDC, ta mắc vào điện trở R1 (hình vẽ) để giữ dòng điện chạy trong dây dẫn khoảng 10mA đến 20mA.
Giữ tín hiệu ra V0 cũng trong khoảng từ 5 VDC đến 24 VDC, dòng điện là 10 mA hoặc thấp hơn. Khi dòng trên 10 mA, phải mắc điện trở R2.
4. NGUỒN CẤP
Phải cung cấp đủ dòng cho tín hiệu vào, nếu không đủ thì tín hiệu ra để cấp cho motor sẽ giảm theo, dẫn đến các nguy cơ sau:
Motor không thể quay chính xác ở tốc độ cao, mômen trục sẽ giảm. Quá trình khởi động chậm và ngừng quay.
5. CỔNG GIAO TIẾP VỚI MÁY TÍNH
5.1 Cổng nối tiếp (Serial Port hay COM Port)
Ghép nối qua cổng nối tiếp là một kỹ thuật được sử dụng rộng rãi nhất bởi số lượng và chủng loại các thiết bị ngoại vi ghép nối qua cổng này đứng hàng đầu trong các khả năng ghép nối với máy tính. Qua cổng này ta có thể ghép nối modem, chuột, bộ biến đổi A/D, D/A, các thiết bị đo lường thậm chí cả máy in.
Vị trí cổng COM trên mainboard của máy tính
Cổng nối tiếp RS232 là một giao diện phổ biến rộng rãi, người ta còn gọi cổng này là cổng COM1, còn cổng COM2 để tự do cho các ứng dụng khác. Cổng COM được sử dụng để truyền dữ liệu hai chiều giữa máy tính và thiết bị ngoại vi. Việc truyền dữ liệu qua cổng COM được tiến hành theo cách nối tiếp, nghĩa là các bit dữ liệu được truyền đi nối tiếp nhau trên một đường dẫn. Loại truyền này có khả năng dùng cho những ứng dụng có yêu cầu truyền khoảng cách lớn hơn, bởi vì các khả năng gây nhiễu là nhỏ đáng kể hơn khi dùng một cổng song song (cổng máy in).
Sơ đồ chân cổng nối tiếp
Cổng COM có tổng cộng 8 đường dẫn, chưa kể đến đường nối đất. Trên thực tế có hai loại cổng, một loại 9 chân và một loại 25 chân. Cả hai loại này đều có chung một đặc điểm. Việc truyền dữ liệu xảy ra ở trên hai đường dẫn. Qua chân cắm ra TXD máy tính gửi dữ liệu của nó đến KIT vi điều khiển. Trong khi đó các dữ liệu mà máy tính nhận được, lại được dẫn đến chân RXD, các tín hiệu khác đóng vai trò như là tín hiệu hổ trợ khi trao đổi thông tin, và vì thế không phải trong mọi trường hợp ứng dụng đều dùng hết.
Cổng COM 9 chân và 25 chân
Hình cổng Com thật trên mainboard
Chúng ta đã biết, các vi điều khiển có các chân tín hiệu truyền nhận ở mức TTL, không phù hợp với chuẩn RS232, do vậy muốn kết nối với máy vi tính phải qua mạch chuyển điện áp từ mức tín hiệu RS232 sang TTL và ngược lại.
Chuẩn RS232:
– Mức thấp (logic 0) có trị số từ +3v đến +25v.
– Mức cao (logic 1) có trị số từ -3v đến -25v.
– Miền giữa -3v đến +3 v không hợp lệ.
Chuẩn TTL:
Ngõ vào:
– Mức thấp (logic 0) là 0v đến +0.8v.
– Mức cao (logic 1) là +2v đến +5v.
– Miền giữa 0.8v đến +2 v không hợp lệ.
Ngõ ra:
– Mức thấp (logic 0) là 0v đến 0.5v.
– Mức cao (logic 1) là +2.7v đến +5v.
Chú ý:
Vì cổng COM hiện nay không còn phổ biến do tốc độ truyền thấp và xuất hiện chuẩn USB giao tiếp tốt hơn, nên trên nhiều Mainboard nhà sản xuất không còn tích hợp cổng COM nữa. Và cũng như vậy, bạn sẽ hiếm gặp laptop nào có cổng này (coi chừng nhầm cổng COM và VGA). Vậy thì lúc này chúng ta cần có 1 cáp chuyển USB sang COM:
Cáp chuyển đổi giao tiếp USB sang COM
Hoặc là lắp theo mạch chuyển từ cổng RJ45 (jack ADSL) sang COM
Sau khi tìm hiểu đặc điểm giao tiếp qua cổng COM, ta rút ra các ưu nhược điểm sau:
Ưu điểm:
- Khoảng cách truyền xa hơn truyền song song.
- Số dây kết nối ít.
- Có thể truyền không dây dùng hồng ngoại.
- Có thể ghép nối với vi điều khiển hay PLC.
- Cho phép nối mạng.
- Có thể tháo lắp thiết bị trong lúc máy tính đang làm việc.
- Có thể cung cấp nguồn cho các mạch điện đơn giản…
- Dễ lập trình điều khiển vì hầu hết các ngôn ngữ lập trình hướng đối tượng đều tích hợp sẵn module điều khiển cổng nối tiếp.
Nhược điểm:
– Tín hiệu truyền bit nối tiếp nên việc phối hợp chuyển động đồng thời giữa các trục gặp nhiều khó khăn.
– Chuẩn RS-232 không tương thích TTL (Transiztor - Transiztor - Logic), khi thực hiện giao tiếp với vi điều khiển, ta phải dùng thêm mạch chuyển mức logic từ TTL à 232 và ngược lại. Đôi khi dùng thêm opto để cách ly về điện.
– Các bo mạch chủ đời mới của máy tính phần lớn không có tích hợp cổng COM.
5.2. Cổng song song (LPT Port hay Parallel Port)
Tên gọi:
– Cổng song song: Dữ liệu được truyền qua cổng này theo cách song song, cụ thể dữ liệu được truyền 8 bit đồng thời hay còn gọi byte nối tiếp bit song song.
– Cổng máy in: vì hầu hết các máy in đều được nối với máy tính qua cổng này.
– Cổng Centronic: đây là tên của một công ty đã thiết kế ra cổng này. Centronic là tên một công ty chuyên sản xuất máy in kiểu ma trận đứng hàng đầu thế giới. Chính công ty này đã nghĩ ra kiểu thiết kế cổng ghép nối máy in với máy tính.
Cấu trúc cổng song song có 2 loại:
– Ổ cắm 36 chân: ngày nay hầu như không sử dụng.
– Ổ cắm 25 chân: hầu hết các máy tính PC đều trang bị cổng LPT 25 chân, nên ta chỉ cần quan tâm đến loại 25 chân.
Sơ đồ vị trí các chân trên cổng LPT 25 chân
Bảng so sánh tín hiệu ở các chân trên ổ cắm 25 chân và 36 chân
Sau đây là chức năng của các đường dẫn tín hiệu:
Strobe (1): Với một mức logic thấp ở chân này, máy tính thông báo cho máy in biết có một byte đang sẵn sàng trên các đường dẫn tín hiệu để được truyền.
D0 đến D7: Các đường dẫn dữ liệu
Acknowledge: với một mức logic thấp ở chân này, máy in thông báo cho máy tính biết là đã nhận được kí tự vừa gửi và có thể tiếp tục nhận.
Busy (bận – 11): máy in gửi đến chân này mức logic cao trong khi đang đón nhận hoặc in ra dữ liệu để thông báo cho máy tính biết là các bộ đệm trong máy tính biết là các bộ đệm trong máy tính đã bị đầy hoặc máy in trong trạn thái Off-line.
Paper empty (hết giấy – 12): Mức cao ở chân này có nghĩa là giấy đã dùng hết.
Select (13): Một mức cao ở chân này, có nghĩa là máy in đang trong trạng thái kích hoạt (On-line).
Auto Linefeed (tự nạp dòng): Có khi còn gọi là Auto Feed. Bằng một mức thấp ở chân này máy tính PC nhắc máy in tự động nạp một dòng mới mỗi khi kết thúc một dòng.
Error (có lỗi): Bằng một mức thấp ở chân này, máy in thông báo cho máy tính là đã xuất hiện một lỗi, chẳng hạn kẹt giấy hoặc máy in đang trong trạng thái Off-Line.
Reset (đặt lại): Bằng một mức thấp ở chân này, máy in được đặt lại trạng thái được xác định lúc ban đầu.
Select Input: bằng một mức thấp ở chân này, máy in được lựa chọn bởi máy tính.
Như vậy cáp nối giữa máy in và máy tính bao gồm 25 sợi, nhưng không phải tất cả điều được sử dụng mà trên thực tế chỉ có 18 sợi được nối với các chân cụ thể. Nhận xét này giúp chúng ta tận dụng những cáp nối mà trong lõi đã bị đứt một hai sợi.
Qua cách mô tả chức năng của từng tín hiệu riêng lẽ ta có thể nhận thấy các đương dẫn dữ liệu có thể chia thành 3 nhóm:
- Các đường dẫn tín hiệu, xuất ra từ máy tính PC và điều khiển máy tính, được gọi là các đường dẫn điều khiển.
- Các đường dẫn tín hiệu, đưa các thông tin thông báo ngược lại từ máy in về máy tính, được gọi là các đường dẫn trạng thái.
- Đường dẫn dữ liệu, truyền các bit riêng lẽ của các ký tự cần in.
Đáng chú ý là 8 đường dẫn song song đều được dùng để chuyển dữ liệu từ máy tính sang máy in. Trong những trường hợp này, khi chuyển sang các ứng dụng để thực hiện nhiệm vụ đo lường ta phải chuyển dữ liệu từ mạch ngoại vi vào máy tính để thu thập và xử lý. Vì vậy ta phải tận dụng một trong năm đường dẫn theo hướng ngược lại, nghĩa là từ bên ngoài về máy tính để truyền số liệu đo lường. Dưới đây đề cập chi tiết hơn đến các đặc tính một hướng và hai hướng của các đường dẫn này.
Để có thể ghép nối các thiết bị ngoại vi, các mạch điện ứng dụng trong đo lường và điều khiển với cổng song song ta phải tìm hiểu cách trao đổi với các thanh ghi thông qua cách sắp xếp và địa chỉ các thanh ghi cũng như phần mềm. Các đường dẫn của cổng song song được nối với ba thanh ghi 8 bit khác nhau như hình bên dưới:
– Thanh ghi dữ liệu (Data Register).
– Thanh ghi trạng thái (Status Register).
– Thanh ghi điều khiển (Control Register).
Tám đường dẫn dữ liệu dẫn tới 8 ô nhớ trên thanh ghi dữ liệu, còn bốn đường dẫn điều khiển Strobe, Auto Linefeed, Reset, Select Input dẫn tới bốn ô nhớ trên thanh ghi điều khiển, cuối cùng là năm đường dẫn trạng thái Acknowledge, Busy, Paper empty, Select, Error nối tới năm ô trên thanh ghi trạng thái. Trên hình, thanh ghi dữ liệu được chỉ rõ là hai hướng dữ liệu có thể được xuất ra các chân D0 đến D7 hoặc đọc vào, thanh ghi điều khiển cũng là hai hướng, thanh ghi trạng thái chỉ có thể được đọc và vì vậy gọi là một hướng.
Ưu điểm:
– Tín hiệu được truyền song song nên việc nội suy được thực hiện dễ dàng.
– Đều sử dụng mức điện áp tương thích TTL: 0V ÷ +5V, trong đó:
0V: là mức logic LOW
+2V ÷ +5V là mức logic HIGH
nên không cần module chuyển đổi.
Nhược điểm:
– Khoảng cách ghép nối bị hạn chế, dễ bị nhiễu.
– Khó lập trình vì các ngôn ngữ lập trình không hỗ trợ module điều khiển cổng LPT.
– Các bo mạch chủ đời mới của máy tính phần lớn không tích hợp cổng LPT.
Kết luận:
Chọn cổng LPT để giao tiếp giữa máy tính và các driver để điều khiển động cơ bước, vì: điều khiển đồng thời các trục nên tín hiệu điều khiển song song sẽ thực hiện phép nội suy dễ dàng hơn thông qua phần mềm MACH 3.
( Ở phần chương 2 này nhóm chúng em chỉ tìm hiểu cơ bản, vì không chuyên về lĩnh vực điện tử..)
¯&¯
Chương 3
PHẦN MỀM ĐIỀU KHIỂN
3.1 GIỚI THIỆU VỀ PHẦN MỀM MACH3
3.1.1.Tính năng cơ bản và chức năng cung cấp bởi Mach3:
* Chuyển đổi một PC tiêu chuẩn thành một máy CNC đầy đủ tính năng, 6 trục điều khiển CNC
* Cho phép trực tiếp nhập khẩu DXF, BMP, JPG, và các file HPGL qua LazyCam
* Visual Gcode hiển thị
* Tạo ra Gcode qua LazyCam hoặc Wizards
* Hoàn toàn tùy chỉnh giao diện
* Tùy biến M-code và Macros bằng cách sử dụng VBScript
3.1.2 Vấn đề cần giải quyết khi áp dụng vào thực tế :
- I/O hạn chế ( Nếu dng cng lc 2 cổng LTP thì giải quyết được phần nào) => dùng cho một hệ thống lớn cần nhiều tín hiệu I/O thì phải dùng kỹ thuật ModBus ( Ở nước ngoài thì có bán những Card này)
- Dùng tín hiệu Step/Dir chỉ thích hợp với hệ thống dùng Step Motor, còn những hệ thống dùng servo thì phải qua card chuyễn đổi Step/Dir sang tín hiệu Analog 0-10v hoặc -10V, +10v nhằm tương thích với các driver servo.
- Mach3 điều khiển theo dạng vòng hở nên khi ứng dụng trong các hệ thống đòi hỏi độ chính xác cao thì lại phải thiết kế theo dạng vòng kín.
Ưu điểm của Mach3 là chức năng của nó đa dạng, giao diện đẹp và dễ sử dụng.Mô phỏng quá trình làm việc rất rõ ràng. Khai báo các thông số của hệ thống dễ dàng.Lập trình theo hướng mở rộng liên kết với các Script VB. Tùy quan niệm từng người, riêng nhóm thấy Mach3 có lợi thế tiết kiệm được chi phí đáng kể (Nếu giải quyết được 3 vấn đề trên thì Mach3 là l lựa chọn tốt cho các dạng CNC tự chế, lên đời máy CNC)
3.2 CÁCH XÁC LẬP THÔNG SỐ TRONG PHẦN MỀM MACH3
3.2.1.Xác lập các chân vào ra của cổng máy in cho phù hợp với mạch điều khiển.
Vô config/port and pin
Khi đó trên màn hình sẽ xuất hiện
- Tab port setup and axis seletion: để lựa chọn cổng điều khiển của máy tính, trong trường hợp điều khiển bằng cổng DB25 thì sẽ là port 1. Ta xác lập như trong hình sau đó lựa chọn apply để chuyển sang tab bên cạnh.
- Tab motor outputs: để xác lập các chân đầu ra của máy tính ở cổng DB25. Các chân đầu ra này sẽ là các tín hiệu cấp cho mạch giao tiếp và xuống mạch động cơ để điều khiển các trục động cơ. Ta cũng xác lập giống trong hình.
Hàng đầu tiên là xác lập các thông số cho trục X:
- Click 1 lần vào cột Enabled của trục X thì sẽ thay đổi trạng thái dấu phẩy xanh thành dấu nhân đỏ. Dấu phẩy xanh chính là lựa chọn để cho trục X làm việc. Còn dấu nhân đỏ là khong cho trục X làm việc.
- Cột thứ 2 (step pin#) là chân điều khiển xung cấp cho trục X. Theo mạch thiết kế thì chân này là chân số 2, nếu mạch thiết kế khác thì chỉ cần click vào đó rồi thay đổi số là được.
- Cột thứ 3(dir pin#) là chân điều khiển cho mạch động cơ đảo chiều, muốn thay đổi thứ tự chân cũng click vào đó và gõ một chân khác vào.
- Cột thứ 4 (dir lowactive): cột này để xác định chiều + hoặc – của các trục theo mong muốn. Khi click lựa chọn trục này thì lúc đó chiều quay của động cơ sẽ thay đổi khi ta điều khiển cho máy chạy theo chiều + hay – của trục tọa độ. Ban đầu thử ta xác lập giống trong hình vẽ rồi tí nữa cho động cơ chạy thử theo chiều + xem động cơ quay theo chiều nào, sau đó lại vào xác lập lại rồi tiếp tục cho động cơ chạy theo chiều +, ta sẽ thấy động cơ chạy theo chiều ngược lại.
Như vậy chân này rất quan trọng để khi lắp động cơ vào máy ta sẽ chọn được chiều phù hợp cho trục X và trục Y.
- Cột thứ 5 (Step lowactive): cột này để xác định trạng thái tác động của chân cấp xung cho mạch điều khiển. Nếu xung điều khiển step là xung âm thì lựa chọn dấu phẩy, còn xung + thì lựa chọn dấu nhân.
- Cột thứ 6 (step port): cột này để xác lập xem chân điều khiển step thuộc port nào. Vì ta điều khiển bằng cổng máy in DB25 nên kí hiệu của nó là port 1. Ban đầu phần mềm sẽ để chế độ mặc định là 0, ta click vào đó rồi gõ số 1 vào ô rồi enter.
- Cột thứ 7 (dir port): cũng tương tự như cột step port. Chân này cũng điều khển từ port 1.
- Các hàng của trục Y, Z cũng làm tương tự trục X theo hình vẽ. Vì máy có 4 trục nên xác lập 4 trục. Nếu có nhiều trục thì ở cột đầu ta chọn thêm các trục A, B, C rồi làm tương tự như trục X.
- Hàng cuối cùng (spindle): là hàng xác lập chân điều khiển spindle có nhiều chế độ để điều khiển spindle (điều khiển PWM, điều khiển bằng động cơ bước, và điều khiển đóng mở relay). Trong mạch giao tiếp sử dụng phương pháp đóng mở relay nên hàng spindle này không cần xác lập gì cả.
- Sau khi xác lập hết thông số trong tab này thì click apply để save lại.
- Lưu ý nếu ta không click apply mà chuyển ngay sang tab khác thì các thong số vừa rồi sẽ không được lưu lại mà sẽ quay về trạng thái trước xác lập.
Tab motor input: để xác lập các tín hiệu đầu vào cho máy tính, khi máy tính nhận được các tín hiệu từ bên ngoài vào lúc đó phần mềm sẽ phân tích và xử lý xem đó là gì sau đó sẽ xuất tín hiệu để điều khiển. phần mềm mach là một phần mềm mạnh có
.............................................
Phần D: KẾT LUẬN VÀ KIẾN NGHỊ
¯&¯
1.Kết quả đạt được:
- Đã chế tạo và lắp ráp hoàn chỉnh phần cơ khí của bàn máy CNC. Các chuyển động tịnh tiến theo phương X, Y, Z dùng bộ truyền vitme-thanh trượt bi, Ứng dụng được các phần mềm CAD-CAM để thiết kế và xuất file G-code.
- Sử dụng phần mềm Mach3 đọc file G-code để điều khiển bàn máy CNC gia công ra sản phẩm đã thiết kế.
Qua quá trình thực hiện đề tài đã giúp chúng em hiểu rõ hơn về máy CNC. Vận dụng những kiến thức đã học áp dụng vào thiết kế và chế tạo một máy khắc laser tự động, điều quan trọng hơn là giúp chúng em có được một sự tự tin khi chúng em bắt tay vào làm một việc thực tế từ đó mà có được những kinh nghiệm quí báu cho bản thân khi chuẩn bị rời khỏi nghế nhà trường và cuối cùng là những kinh nghiệm quí báu mà các thầy cô đã truyền và chỉ dẩn cho chúng em trong thời gian thực hiện đề tài.
1.1 Kết quả chưa đạt được:
Do vấn đề thời gian và những khó khăn trong lúc thi công đã dẫn đến một số ý tưởng chưa được hoàn thành, sử dụng thêm trục A quay phôi khắc những chi tiết dạng trụ, tròn. Trên biên dạng cong.
Hệ thống công tắc hành trình chưa thực hiện được do kiến thức còn hạn chế và điều kiện không cho phép.
2.Kiến Nghị
Hướng phát triển của đề tài:
-Sử dụng đầu laser công suất lớn có thể gia công dược kim loại, phi kim
-Đầu tư thêm về phần điện tử, giúp máy hoàn thiện hơn, có thể ứng dụng rộng rãi trong sản xuất, vì đây là máy có tiềm năng….




