ĐỒ ÁN TỐT NGHIỆP Bộ thí nghiệm điều khiển động cơ bằng PID liên tục


NỘI DUNG ĐỒ ÁN
PHẦN I GIỚI THIỆU
Chương 1: ĐIỀU KHIỂN ĐỘNG CƠ ĐIỆN MỘT CHIỀU
- CẤU TẠO CƠ BẢN CỦA MÁY ĐIỆN MỘT CHIỀU
- Máy điện một chiều có thể là máy phát hoặc động cơ và có cấu tạo giống nhau.Một phần tiết diện ngang của một máy điện một chiều hai cực được vẽ trên hình 1.1. Và gồm có:
Hình 1.1:Một phần tiết diện ngang của máy điện một chiều hai cực
- Phần cảm cố định gồm 2p cực từ lồi trên đó mang dây quấn kích từ sao cho các cực từ liên tiếp luân phiên Bắc(N) và Nam(S).Các cực từ gắn trên gong từ cũng dung để dẫn từ thông .
Hình 1.2: Phần ứng
- Vành góp(Hình 1.3) còn gọi là vành đổi chiều gồm nhiều phím đồng cứng có dạng hình nêm, cách điện với nhau và với trục phần ứng,được ghép thành một khối hình trụ.
Chổi than(Hình 1.4)dòng điện một chiều được đưa vào hay lấy ra từ dây quấn phần ứng thông qua các chổi than tì lên cổ góp.
Hình 1.4: Chổi than
- NGUYÊN LÝ LÀM VIỆC
Khi đặt vào trong từ trường một dây dẫn thì từ trường sẽ tác dụng một lực từ vào dòng điện(vào dây dẫn) và làm dây dẫn chuyển động. Động cơ điện nói chung và động cơ điện một chiều nói riêng làm việc theo nguyên lí này
Từ trường được tạo ra nhờ các cuộn dây có dòng điện một chiều chạy qua hay nam châm vĩnh cửu. Các cuộn này gọi là cuộn cảm(hay cuộn kích từ) và được quấn quanh cực từ. Thường thì stator động cơ đặt các cuộn cảm hay nam châm vĩnh cửu. Từ trường do cuộn cảm tạo ra sẽ tác dụng một lực từ vào các dây dẫn đặt trong các rãnh của rotor khi có dòng điện chạy qua,cuộn dây này gọi là cuộn ứng. Dòng điện đưa vào cuộn ứng qua các chổi than và vành góp.Rotor mang cuộn ứng nên gọi là phần ứng.
Hình 1.5: Sơ đồ nguyên lí cấu tạo động cơ điện một chiều
1-Vành góp; 2-Chổi than; 3-Rotor; 4-Cực từ;
5-Cuộn cảm; 6-Stator; 7-Cuộn ứng.
Giả sử các dây dẫn cuộn ứng ở nữa trên rotor có có dòng điện hướng vào,còn các dây dẫn cuộn ứng ở nữa dưới rotor có dòng điện hướng ra như hình vẽ. Lực từ F tác động vào rotor có chiều tác động theo quy tắc bàn tay trái sẽ tạo ra momen làm quay rotor ngược chiều kim đồng hồ.
Khi động cơ làm việc,cuộn cảm tạo ra từ trường Φd dọc trục cực từ và phân bố đối xứng đối với cực từ. Đồng thời,dòng điện trong cuộn ứng củng tạo ra từ trường riêng Φn hướng ngang trục cực từ. Từ trường tổng trong trục động cơ mất tính đối xứng dọc trục và mặt phẳng OO’ quay đi một góc β(ngược chiều quay của rotor) hình 1.6.
Hình 1.6: Từ trường trong động cơ điện một chiều
- Do cuộn cảm tạo ra
- Do cuộn ứng tạo ra
- Do hai cuộn tổng hợp
- Tổng vectơ các sức từ động
Dòng điện cuộn ứng càng lớn thì Φn càng mạnh và góc quay càng lớn. Ta nói phản ứng phần ứng càng mạnh.
- ĐẶC TÍNH CƠ ĐỘNG CƠ ĐIỆN MỘT CHIỀU
- Động cơ điện một chiều kích từ độc lập và song song
Ở động cơ điện một chiều kích từ độc lập(hình 1.7),cuộn kích từ được cấp điện từ một nguồn điện ngoài độc lập với nguồn điện cấp cho rotor(cuộn ứng).
Hình 1.7
- Phương trình đặc tính cơ:
Khi động cơ làm việc, rotor mang cuộn ứng quay trong từ trường cuộn cảm nên trong cuộn ứng suất hiện một sức điện động cảm ứng9hay còn gọi là sức phản điện động) có chiều ngược với chiều điện áp đặt vào phần ứng của động cơ. Phương trình điện áp ở mạch rotor sẽ là:
U = E+IưRưΣ (1.1)
Trong đó:
U điện áp lưới,V;
E sức điện động của động cơ,V.
Iư dòng điện phần ứng của động cơ,A.
RưΣ điện trở toàn bộ mạch phần ứng,Ω.
RưΣ=Rư+Rphụ (1.2)
Rphụ điện trở phụ trong mạch phần ứng.
Rư điện trở mạch phần ứng.
Sức điện động phần ứng tỉ lệ với tốc độ quay của rotor:
(1
Trong đó:
Φ từ thông qua một cực từ,Wb.
ω tốc độ góc của rotor, rad/s.
k hệ số phụ thuộc vào kết cấu của động cơ
Với:
P số đôi cực từ chính
N số thanh dẫn tác dụng của cuộn ứng
A số mạch nhánh song song của cuộn ứng
Nhờ lực từ tác dụng vào dây dẫn phần ứng khi có dòng điện, rotor quay dưới tác dụng của momen quay.
Từ phương trình (1.1),(1.3)và(1.4)phương trình đặc tính cơ ω = f (M) như sau:
- Đường đặc tính cơ:
Phương trình đặc tính cơ (1.5) có dạng hàm bậc nhất y =Ax+B , nên đường biểu diễn trên hệ trục tọa độ M0ω là một đường thẳng với độ dốc âm. Đường đặc tính cơ cắt trục tung 0ω tại điểm có tung độ:
Độ dốc 0 là tốc độ ứng với Mc=0, nghĩa là khi không có lực cản nào cả. Đó là tốc độ lớn nhất của động cơ mà không thể đạt được ở chế độ động cơ vì không bao giờ xảy ra Mc=0(do lực ma sát luôn tồn tại khi động cơ quay). Tốc độ ![]() 0 gọi là tốc độ không tải ly tưởng
0 gọi là tốc độ không tải ly tưởng
Hình 1.8: Đặc tính cơ của động cơ điện một chiều kích từ độc lập.
Khi toàn bộ các thông số điện của động cơ là định mức theo thiết kế(được ghi trên nhãn động cơ) và không mắc thêm điện trở phụ vào mạch động cơ thì RưΣ=Rư và phương trình đặc tính cơ sẽ là:
Udm /kΦdm – RưM / (kΦdm)2 (1.7)
Đường đặc tính cơ lúc này là đường đặc tính cơ tự nhiên(hình 1.9)
Hình 1.9: Đặc tính cơ tự nhiên của động cơ điện một chiều kích từ độc lập
Khi phụ tải tăng dần từ Mc đến Mc=Mdm (∆Mc=Mc – 0) thì tốc độ động cơ giảm dần từ 0 xuống dm (∆ω = 0 – dm). Điểm A(Mdm,dm) gọi là điểm làm việc định mức. Phương trình (1.5) và (1.7) có thể viết lại là:
Độ sụt tốc tỉ lệ với momen tải:
Như vậy đường thẳng đặc tính cơ có thể vẽ được nhờ hai điểm 0 và A. Cũng có thể dung một trong hai điểm đó kết hợp với điểm khác thứ ba là điểm cắt của đặc tính cơ với trục hoành 0M. Điểm này có tung độ = 0 và hoành độ suy ra từ (1.6). (1.10)
Trong đó:
(1.11
Momen Mnm và dòng điện Inm gọi là momen ngắn mạch và dòng điện ngắn mạch. Đó là giá trị momen lớn nhất và dòng điện lớn nhất của động cơ khi được cấp điện đầy đủ mà tốc độ bằng không . Trường hợp này xãy ra khi bắt đầu mở máy và khi động cơ đang chạy mà bị dừng lại vì bị kẹt hoặc quá tải không kéo được. Dòng điện ngắn mạch này lớn và thường bằng
Inm= (10÷20)Idm
Nó có thể gây cháy hỏng động cơ nếu hiện tượng tồn tại kéo dài. Do vậy khi mở máy phải them điện trở phụ Rphu vào mạch rotor để hạn chế dòng điện mở máy và khi động cơ dang chạy bị dừng lại thì cần phải nhanh chóng cách điện.
- Ảnh hưởng của các thông số điện đối với đặc tính của động cơ:
Phương trình (1.5) cho thấy, đường đặc tính cơ bậc nhất ω = f(M) phụ thuộc vào các hệ số của phương trình, trong đó có chứa các thông số điện U,RưΣ và Φ. Ta sét ảnh hưởng của các thong số này.
- Trường hợp thay đổi điện áp phần ứng (hình 1.10)
Hình 1.10:Họ đặc tính cơ của động cơ điện một chiều kích từ độc lập khi giảm điện áp phần ứng
Vì điện áp đặt vào phần ứng không thể vượt quá giá trị định mức nên ta chỉ có thể thay đổi về phía giảm. Trường hợp này độ dốc(hay độ cứng) của đặc tính cơ không thay đổi:
Còn tốc độ lí tưởng 0 thay đổi tỉ lệ thuận với điện áp:
Như vậy khi thay đổi điện áp đặt vào phần ứng ta được một họ các đường đặc tính cơ song song với đường đặc tính cơ tự nhiên(tn) và thấp hơn đường đặc tính cơ tự nhiên. Các đường đặc tính cơ này gọi là các đường đặc tính cơ nhan tạo(nt).
- Trường hợp thay đổi điện trở mạch phần ứng:( hình 1.11)
RưΣ =var;U =count; Φ=count
Vì RưΣ=Rư+Rphu nên điện trở mạch phần ứng chỉ có thể thay đổi về phía tăng Rphu. Trường hợp này tốc độ không tải giữ nguyên
Còn độ dốc (hay độ cứng) thay đổi tỉ lệ thuận theo RưΣ
Hình 1.11: Họ đặc tính cơ của động cơ điện một chiều kích từ độc lập khi giảm điện trở phần ứng.
Như vậy khi tăng điện trở Rphụ trong mạch phần ứng ta được một họ các đường đặc tính cơ nt cùng đi qua điểm (0,0).
- Trường hợp thay đổi từ thông kích từ:(hình 1.12)
Φ =var; RưΣ=count;U =count.
Để thay đổi từ thông Φ ,phải thay đổi dòng kích từ nhờ biến trở Rkt mắc ở mạch cuộn cảm. Vì chỉ có thể tăng Rkt nên từ thông kích từ chỉ có thể thay đổi về phía giảm. Trường hợp này, cả tốc độ không tải lí tưởng và độ dốc đặc tính cơ đều thay đổi.
Khi giảm từ thông,0 tăng, còn độ dốc thì giảm mạnh
Hình 1.12: Họ đặc tính cơ của động cơ điện một chiều kích từ độc lập khi giảm từ thông.
- Đảo chiều quay động cơ:
Chiều lực từ tác dụng vào dòng điện xác định theo quy tắc bàn tay trái. Khi đảo chiều từ thông hay dòng điện thì lực từ có chiều ngược lại. Vậy muốn đảo chiều quay của động cơ điện một chiều có thể thực hiện theo hai cách:
- Đảo chiều từ thông(đảo chiều dòng kích từ)
- Đảo chiều dòng điện phần ứng
Đường đặc tính cơ của động cơ khi quay thuận và quay ngược là đối xứng nhau qua gốc tọa độ.
- Mở máy động cơ kích từ độc lập:
Lúc bắt đầu đóng điện cho động cơ, tốc độ động cơ còn bằng không nên dòng điện động cơ Inm là rất lớn tạo ra momen ngắn mạch là rất lớn và có thể gây ra các hậu quả xấu
Dòng điện mở máy:
Đối với động cơ có công xuất càng lớn thì Rư có giá trị càng nhỏ và dòng Inm càng lớn. Điều này làm xấu chế độ chuyển mạch trong động cơ đốt nóng mạch động cơ và gây sụt áp lưới điện .
Momen mở máy quá lớn sẽ tạo ra các xung lực động làm hệ truyền động bị giật, lắc không tốt về mặt cơ học, hại máy và có thể gây nguy hiểm như gãy trục vỡ bánh răng,v.v…
Vậy để đảm bảo an toàn cho động cơ và các cơ cấu truyền động và tránh những ảnh hưởng xấu tới lưới điện, phải hạn chế dòng điện khi mở máy, không cho vượt quá giá trị:
Nghĩa là cần phải thêm điện trở phụ Rphu vào mạch phần ứng sao cho:
Trong quá trình mở máy, tốc độ động cơ ω tăng dần sức điện động của động cơ E = kΦω cũng tăng dần và dòng điện động cơ bị giảm:
Do đó momen động cơ cũng giảm. Do vậy, khi momen giảm đi một mức nào đó thì phải cách điện trở phụ trong mạch phần ứng để động cơ trở về làm việc trên đặc tính tự nhiên.
Tóm lai để hạn chế dòng điện quá lớn lúc mở máy phải thêm điện trở vào mạch phần ứng. Trong quá trình động cơ tăng tốc, phải loại bỏ dần các điện trở mở máy ra khỏi mạch phần ứng.
- Động cơ điện một chiều kích từ nối tiếp:
Động cơ điện một chiều kích từ nối tiếp có cuộn kích từ mắc nối tiếp với cuộn dây phần ứng. Với cách mắc nối tiếp,dòng điện kích từ bằng dòng điện phần ứng nên cuộn dây kích từ nối tiếp có tiết diện dây lớn và số vòng dây ít. Từ thông của động cơ phụ thuộc vào dòng điện phần ứng(tức là phụ thuộc vào tải)
hình 1.13: a)sơ đồ nguyên lí nối dây b)Từ thông động cơ một chiều kích động cơ điện một chiều kích từ nối tiếp. từ nối tiếp phụ thuộc vào dòngđiện
phần ứng (cũng là dòng kích từ).
Biểu thức (1.12) cho biết: từ thông Φ phụ thuộc tuyến tính vào dòng điện phần ứng(tức dòng điện kích từ). Điều này đúng khi mạch từ không bảo hòa từ và khi dòng điện Iư < (0.8÷ 0.9)Idm. Tiếp tăng Iư thì tốc độ tăng từ thông Φ chậm hơn tốc độ tăng Iư rồi sau đó khi tải lớn (Iư>Idm), có thể coi Φ = count vì mạch từ đã bị bảo hòa.
- Phương trình đặc tính cơ:
Xuất phát từ các phương trình cơ bản của động cơ điện một chiều nói chung:
U = E +IưRưΣ (a)
E = kΦω (b)
M = kΦIư = kk’Iư2 (c)
Ta có thể tìm được phương trình đặc tính cơ của động cơ điện một chiều kích từ nối tiếp:
Từ (1.12), (b) và (a):
(d)
Rút Iư từ (c) và thay vào (d):
(1.13)
- Đường đặc tính cơ:
Đường đặc tính cơ của động cơ điện một chiều kích từ nối tiếp theo phương trình (1.13) là đường hyperbol.
Hình 1.14:Đặc tính cơ của động cơ điện một chiều kích từ nối tiếp
Thực tế, động cơ thường được thiết kế để làm việc với mạch với mạch từ bảo hòa ở vùng tải định mức. Do vậy khi tải nhỏ, đặc tính cơ có đường hyperbol bậc hai và mềm, còn khi tải lớn (trên định mức) đặc tính có dạng gần thẳng và cứng hơn vì mạch từ đã bảo hòa (Φ = count).
Khi Mc=0(Iư=0), theo(1.13) thì trị số ω sẽ vô cùng lớn. Thực tế, do luôn có Mc ≠ 0 vì không thể không có lực ma sát ở cổ trục động cơ và mạch từ khi Ikt = 0 vẫn còn có từ dư (Φdư ≠ 0) nên khi không tải Mc ≈ 0,tốc độ động cơ sẽ là:
(1.14)
Do đường đặc tính cơ mềm nên tốc độ động cơ mộy chiều kích từ nối tiếp biến động mạnh theo phụ tải. Ở vùng tải lớn thì độ cứng đặc tính cơ lớn hơn, do đó tốc độ ít bị thay đổi mạnh theo tải.
Phương trình đặc tính cơ tự nhiên suy từ (1.13) với RưΣ =Rư
(1.15)
Đặc tính cơ cắt trục hoành tại điểm mmm, trị số Mmm suy ra khi cho ω = 0:
(1.16)
Trong đó:
(1.17)
- Ảnh hưởng của các thông số điện đối với đặc tính cơ:
Phương trình (1.13) cho thấy đặc tính cơ ω = f(M) của động cơ điện một chiều kích từ nối tiếp bị ảnh hưởng bởi điện trở mạch động cơ(mạch phần ứng cũng là mạch kích từ).
Đặc tính cơ tự nhiên (tn) cao nhất ứng với điện trở phụ Rphu = 0. Các đặc tính cơ nhân tạo (nt) ứng với Rphu ≠ 0. Đặc tính càng thấp khi Rphu càng lớn.
Ở động cơ một chiều kích từ nối tiếp, dòng điện phần ứng củng là dòng điện kích từ nên khả năng tải của động cơ hầu như không bị ảnh hưởng bởi điện áp.
- Đảo chiều quay của động cơ một chiều kích từ nối tiếp:
Củng như động cơ một chiều kích từ song song, động cơ kích từ nối tiếp sẽ đảo chiều quay khi đảo chiều dòng điện phần ứng .
- Mở máy động cơ kích từ nối tiếp:
Lúc mở máy động cơ, phải đưa thêm điện trở mở máy vào mạch động cơ để hạn chế dòng điện mở máy trong giới hạn không quá 2.5Idm. Trong quá trình động cơ tăng tốc, phải cắt dần điện trở mở máy, động cơ sẽ làm việc trên đường đặc tính cơ tự nhiên không có điện trở mở máy.
- Động cơ điện một chiều kích từ hổn hợp:
Động cơ một chiều kích từ hổn hợp ít gặp hơn các loại động cơ đã xét ở các mục trên. Trong động cơ loại này, từ thông được tạo ra do tác dụng đồng thời của hai cuộn kích từ: một cuộn song song một cuộn nối tiếp. Do vậy đường đặc tính cơ của động cơ điện một chiều kích từ hổn hợp phân bổ giữa đặc tính cơ của động cơ một chiều kích từ song song và đặc tính cơ của động cơ kích từ nối tiếp.
Nếu từ trường của cuộn song song tạo ra mạnh hơn cuộn nối tiếp thì đặc tính cơ của động cơ của động cơ kích từ hổn hợp gần đặc tính cơ của động cơ kích từ song song hơn.
Nếu từ trường của cuộn nối tiếp tao ra mạnh hơn từ trường cuộn song song thì đặc tính cơ của động cơ kích từ hổn hợp gần đặc tính cơ của động cơ kích từ nối tiếp hơn.
Một trong những đặc điểm của động cơ kích từ hổn hợp là có đặc tính cơ mềm, có thể chạy ở chế độ không tải.
- CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ ĐIỆN MỘT CHIỀU
Từ phương trình đặc tính cơ ta thấy có rất nhiều phương pháp để thay đổi tốc độ động cơ điện một chiều như:
Thay đổi từ thông ,thay đổi di, thay đổi điện áp phần ứng.
Sau đây là phương pháp điều chỉnh tốc độ động cơ điện một chiều bằng cách điều chỉnh điện áp đặt vào phần ứng của động cơ điện.
- Điều chỉnh tốc độ động cơ sử dụng các bộ chỉnh lưu bán dẫn:
Để thực hiện phương pháp điều chỉnh này, cần phải có một nguồn cung cấp mà điện áp của nó có thể thay đổi được để cung cấp cho phần ứng của động cơ. Các nguồn điện áp này thường được tạo ra bởi một bộ chỉnh lưu bán dẫn có điều khiển (Thysistor) hoặc không có điều khiển (diode)Hình 1.15: Điều chỉnh điện áp phần ứng bằng bộ điều chỉnh điện áp và bộ chỉnh lưu diode.
Hình 1.16: Điều chỉnh điện áp phần ứng bằng bộ chỉnh lưu có điều khiển
- Điều chỉnh tốc độ động cơ khi sử dụng thiết bị điều chỉnh xung áp(điều động độ rộng xung)
Mạch điều khiển động cơ một chiều bằng phương pháp điều chỉnh độ rộng xung (PWmcircuit – Pulse Wide Modulation) hoạt động theo nguyên tắc cấp nguồn cho động cơ bằng chuỗi xung đóng mở với tốc độ nhanh. Nguồn DC được chuyển đổi thành tín hiệu xung vuông. Tín hiệu xung vuông này được cấp cho động cơ. Nếu tần số chuyển mạch đủ lớn động cơ sẽ chạy với tốc độ đều đặn phụ thuộc vào momen của trục quay.
Với phương pháp PWM, điều chỉnh tốc độ của động cơ thông qua việc điều chế độ rộng xungm tức là thời gian đầy xung (on) của chuổi xung vuông cấp cho động cơ. Việc điều chỉnh này sẽ tác động đến công suất trung bình cấp cho động cơ và do đó sẽ thay đổi tốc độ của động cơ cần điều khiển.
Như trên hình, với dãy xung điều khiển trên cùng, xung ON có độ rộng nhỏ nên động cơ chạy chậm. Nếu độ rộng xung ON càng lớn (như dãy xung thứ 2 và thứ 3) động cơ DC chạy càng nhanh .
Chương 2: PID LIÊN TỤC
- Các tiêu chuẩn về chất lượng:
- Ổn định là điều kiện cần đối với một hệ ĐKTĐ, song chưa phải là đủ để hệ thống được sử dụng trong thực tế. Nhiều yêu cầu đòi hỏi hệ thống phải thỏa mãn được cùng một lúc các tiêu chuẩn chất lượng khác nhau như độ chính xác, độ ổn định, đáp ứng quá độ, độ nhạy, khả năng chống nhiễu... Sau đây là một số tiêu chuẩn thường dùng để đánh giá chất lượng hệ thống điều khiển
Hình 2.1:
- Sai số xác lập:
- Sai số là hiệu số giữa tín hiệu vào và tín hiệu hồi tiếp. Mục đích muốn tín hiệu ra qua vòng hồi tiếp luôn luôn bám được tín hiệu vào mong muốn. Điều đó có nghĩa sai số xác lập bằng không.
- Độ vọt lố:
- Thời gian đáp ứng:
- Thời gian lên đỉnh là thời gian đáp ứng ra đạt giá trị cực đại
- Thời gian quá độ ts = tset xác định bởi thời điểm đáp ứng ra từ sau đó trở đi không vượt ra khỏi miền giới hạn sai số D quanh giá trị xác lập. Ví dụ: D có thể là ± 2%, ± 5%...
- Độ dự trữ ổn định:
- Định nghĩa: Khoảng cách từ trục ảo đến nghiệm cực gần nhất (nghiệm thực hoặc phức) được gọi là độ dữ trữ ổn định của hệ. Ký hiệu khoảng cách ngắn nhất ấy là lố, nếu lố càng lớn thì quá trình quá độ càng nhanh về xác lập. Đáp ứng quá độ của hệ bậc n:
- Tiêu chuẩn tích phân:
- Trong thực tế một hệ thống ĐKTĐ được thiết kế phải thỏa yêu cầu ở cả hai chế độ xác lập và quá độ. Quá trình quá độ có thể được đánh giá thông qua giá trị tích phân của sai lệch giữa giá trị đặt và giá trị tức thời đo được của đại lượng cần điều chỉnh.
- Thiết kế bộ điều khiển hệ thống liên tục:
Có nhiều cách bổ sung bộ điều khiển vào hệ thống cho trước:
Cách 1: thêm bộ điều khiển nối tiếp với hàm truyền của hệ hở, phương pháp này gọi là hiệu chỉnh nối tiếp (hình 2.2). Bộ điều khiển được sử dụng có thể là bộ hiệu chỉnh sớm pha, trễ pha,sớm trễ pha, P, PD, PI, PID,… Để thiết kế hệ thống hiệu chỉnh nối tiếp chúng ta có thể sử dụng phương pháp QĐNS hay phương pháp biểu đồ Bode. Ngoài ra một phương pháp cũng thường được sử dụng là thiết kế theo đặc tính quá độ chuẩn.
Hinh2.2
Cách 2: điều khiển hồi tiếp trạng thái, theo phương pháp này tất cả các trạng thái của hệ thống được phản hồi trở về ngõ vào và tín hiệu điều khiển có dạng u(t) = r(t) - Kx(t) (hình 2.3). Tùy theo cách tính véctơ hồi tiếp trạng thái K mà ta có phương pháp điều khiển phân bố cực, điều khiển tối ưu LQR
Hình 2.3
- Giới thiệu bộ điều khiển PID
Bộ điều khiển PID được sử dụng rất rộng rãi trong thực tế để điều khiển nhiều loại đối tượng khác nhau như nhiệt độ lò nhiệt, tốc độ động cơ, mực chất lỏng trong bồn chứa,… Lý do bộ điều khiển này được sử dụng rộng rãi là vì nó có khả năng triệt tiêu sai số xác lập, tăng đáp ứng quá độ, giảm độ vọt lố nếu các tham số bộ điều khiển được chọn lựa thích hợp. Do sự thông dụng của nó nên nhiều hãng sản xuất thiết bị điều khiển đã cho ra đời các bộ điều khiển thương mại rất thông dụng. Thực tế các phương pháp thiết kế bộ điều khiển PID dùng quỹ đạo nghiệm số, giản đồ Bode hay phương pháp giải tích rất ít được sử dụng do việc khó khăn trong xây dựng hàm truyền đối tượng. Phương pháp phổ biến nhất để chọn tham số PID hiện nay là phương pháp Ziegler-Nichols.
Bộ điều khiển PID có hàm truyền liên tục như sau:
G(s) =
- Ảnh hưởng các khâu lên đáp ứng điều khiển:
- Khâu tỷ lệ: Hệ số khuếch đại KP càng lớn thì sai số xác lập càng nhỏ, tuy nhiên khi KP tăng thì các cực của hệ thống nói chung có xu hướng di chuyển ra xa trục thực, điều đó có nghĩa là đáp ứng của hệ thống càng dao động, độ vọt lố càng cao. Nếu KP tăng quá giá trị hệ số khuếch đại giới hạn thì hệ thống sẽ trở nên mất ổn định. Do đó nếu không thể có sai số của hệ thống bằng 0 thì cũng không thể tăng hệ số khuếch đại lên vô cùng.
- Khâu vi phân tỉ lệ PD: khâu hiệu chỉnh PD là một trường hợp riêng của khâu hiệu chỉnh sớm pha,trong đó độ lệch pha cực đại giữa tín hiệu ra và tín hiệu vào là 90° , tương ứng với tần số là vô cùng . Khâu hiệu chỉnh PD có đặc điểm của khâu hiệu chỉnh sớm pha, nghĩa là làm nhanh đáp ứng của hệ thống, giảm thời gian quá độ. Tuy nhiên do hệ số khuếch đại ở tần số cao của khâu hiệu chỉnh PD là vô cùng lớn nên khâu hiệu chỉnh PD làm cho hệ thống rất nhạy với nhiễu tần số cao. Do đó xét về ảnh hưởng của nhiễu tần số cao thì khâu hiệu chỉnh sớm pha có ưu thế hơn khâu hiệu chỉnh PD.
- Khâu tích phân tỉ lệ PI khâu hiệu chỉnh PI là một trường hợp riêng của khâu hiệu chỉnh trễ pha, trong đó độ lệch pha cực tiểu giữa tín hiệu ra và tín hiệu vào là -90° , tương ứng với tần số wmin = 0. Khâu hiệu chỉnh PI có đặc điểm của khâu hiệu chỉnh trễ pha, nghĩa là làm chậm đáp ứng quá độ, tăng độ vọt lố, giảm sai số xác lập. Do hệ số khuếch đại của khâu PI bằng vô cùng tại tần số bằng 0 nên khâu hiệu chỉnh PI làm cho sai số đối với tín hiệu vào là hàm nấc của hệ thống không có khâu vi phân lý tưởng bằng 0 (hệ vô sai bậc một). Ngoài ra do khâu PI là một bộ lọc thông thấp nên nó còn có tác dụng triệt tiêu nhiễu tần số cao tác động vào hệ thống.
- Khâu vi tích phân tỉ lệ PID : Khâu hiệu chỉnh PID là một trường hợp riêng của hiệu chỉnh sớm trễ pha, trong đó độ lệch pha cực tiểu giữa tín hiệu ra và tín hiệu vào là jmin = -90° , tương ứng với tần số bằng 0 ; độ lệch pha cực đại giữa tín hiệu ra và tín hiệu vào là +90° , tương ứng với tần số là vô cùng .Do khâu hiệu hỉnh PID có thể xem là khâu PI mắc nối tiếp với khâu PD nên nó có các ưu điểm của khâu PI và PD. Nghĩa là khâu hiệu chỉnh PID cải thiện đáp ứng quá độ (giảm vọt lố, giảm thời gian quá độ) và giảm sai số xác lập (nếu đối tượng không có khâu vi phân lý tưởng thì sai số xác lập đối với tín hiệu vào là hàm nấc bằng 0).
|
Đáp ứng vòng kín |
Thời gian lên |
Độ vọt lố |
Thời gian xác lập |
Sai số xác lập |
|
Kp |
Giảm |
Tăng |
Thay đổi nhỏ |
Giảm |
|
Ki |
Giảm |
Tăng |
Tăng |
Loại bỏ |
|
KD |
Thay đổi nhỏ |
Giảm |
Giảm |
Thay đổi nhỏ |
.................................................................................................
- Lm324 gồm 4 Op-Amp độc lập, độ khuếch đại cao, tần số dao động bên trong được thiết kế riêng biệt để có thể hoạt động bằng nguồn cung cấp đơn của toàn bộ độ rộng của dãi điện áp. Vùng ứng dụng bao gồm: bộ biến đổi khuếch đại, khối khuếch đại DC, dòng của tất cả Op-Amp thông thường. Ngày nay vùng ứng dụng có thể thực thi một cách dễ dàng với hệ thống cung cấp nguồn đơn.
- Đặc điểm:
+Tần số nội bù cho đơn vị khuếch đại.
+Độ tăng ích điện áp DC lớn: 100dB
+Độ rộng băng tân: 1MHz
+Dãi điện áp cung cấp rộng:
+Nguồn đơn: 3V-32V.
+Nguồn đôi: ±1.5V đến ±16V.
+Dòng điện mang cung cấp rất thấp 700µA.
+Điện áp bù đầu vào thấp 2mV Và dòng bù 5nA
+Vi sai điện áp đầu vào có độ rộng bằng với điện áp cung cấp.
+Tham chiếu đầu vào nối đất.
+Phạm vi điện áp ra lớn: 0V đến V -1.5 DC.
555 là một loại linh kiện khá là phổ biến bây giờ với việc dễ dàng tạo được xung vuông và có thể thay đổi tần số tùy thích, với sơ đồ mạch đơn giản,điều chế được độ rộng xung. Nó được ứng dụng hầu hết vào các mạch tạo xung đóng cắt hay là những mạch dao động khác.Đây là linh kiện của hãng CMOS sản xuất .Sau đây là bảng thông số của 555 có trên thị trường :
+ Điện áp đầu vào : 2 - 18V ( Tùy từng loại của 555 : LM555, NE555, NE7555..)
+ Dòng điện cung cấp : 6mA - 15Ma
+ Điện áp logic ở mức cao : 0.5 - 15V
+ Điện áp logic ở mức thấp : 0.03 - 0.06V
+ Công suất lớn nhất là : 600mW
* Các chức năng của 555:
Là thiết bị tạo xung chính xác
+ Máy phát xung
+ Điều chế được độ rộng xung (PWM)
+ Điều chế vị trí xung (PPM) (Hay dùng trong thu phát hồng ngoại)
Đấy chỉ là những thông số cơ bản của 555. Còn những thông số khác các pác tham khảo datasheet!
1 : Giới thiệu, sơ đồ khối, sơ đồ nguyên lý, chân của 555
IC thời gian 555 được du nhập vào những năm 1971 bằng công ty Signetics Corporation bằng 2 dòng sản phẩm SE555/NE555 và được gọi là máy thời gian và cũng là loại có đầu tiên. Nó cung cấp cho các nhà thiết kế mạch điện tử với chi phí tương đối rẻ, ổn định và những mạch tổ hợp cho những ứng dụng cho đơn ổn và không ổn định. Từ đó thiết bị này được làm ra với tính thương mại hóa. 10 năm qua một số nhà sản suất ngừng sản suất loại IC này bởi vì sự cạnh tranh và những lý do khác. Tuy thế những công ty khác lại sản suất ra những dòng này
Các dạng hình dáng chân của 555 trong thực tế:
Hình dạng của 555 ở trong hình 1 và hình 2. Loại 8 chân hình tròn và loại 8 chân hình vuông. Nhưng ở thị trường Việt Nam chủ yếu là loại chân vuông.
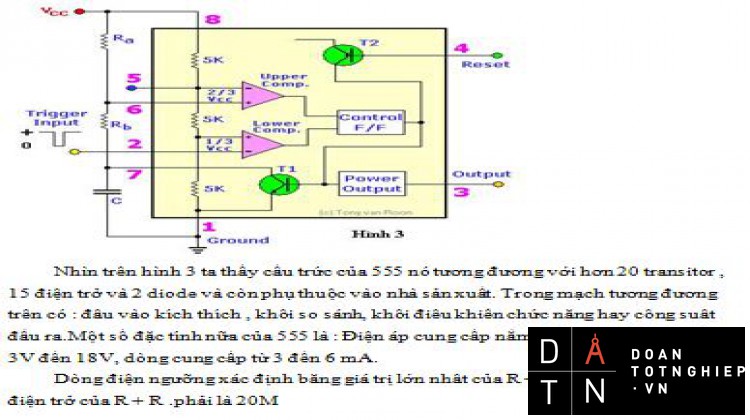
Nhìn trên hình 3 ta thấy cấu trức của 555 nó tương đương với hơn 20 transitor , 15 điện trở và 2 diode và còn phụ thuộc vào nhà sản xuất. Trong mạch tương đương trên có : đầu vào kích thích , khối so sánh, khối điều khiển chức năng hay công suất đầu ra.Một số đặc tính nữa của 555 là : Điện áp cung cấp nằm giữa trong khoảng từ 3V đến 18V, dòng cung cấp từ 3 đến 6 mA.
Dòng điện ngưỡng xác định bằng giá trị lớn nhất của R + R . Để điện áp 15V thì điện trở của R + R .phải là 20M
Tất cả các IC thời gian đều có 1 tụ điện ngoài để tạo ra 1 thời gian đóng cắt của xung đầu ra. Nó là một chu kì hữu hạn để cho tụ điện (C) nạp điện hay phòng điện thong qua một điện trở R. Thời gian này nó đã được xác định và nó có thể tính được thong qua điện trở R và tụ điện C
Mạch nạp RC cơ bản như trên hình 4B Giả thiết tụ điện ban đầu là phóng điện.Khi mà đóng công tắc thì tụ điện bắt đầu nạp thông qua điện trở. Điện áp qua tụ điện từ giá trị 0 lên đến giá trị định mức vào tụ. Đường cong nạp được thể hiện qua hình 4A.Thời gian đó nó để cho tụ điện nạp đến 63.2% điện áp cung cấp và hiểu thời gian này là 1 hằng số. Giá trị thời gian đó có thể tính bằng công thức đơn giản sau:
t = R.C
Đường cong nạp của tụ điện
Chức năng của từng chân của 555
IC NE555 N gồm có 8 chân.
+ Chân số 1(GND): cho nối GND để lấy dòng cấp cho IC hay chân còn gọi là chân chung.
+ Chân số 2(TRIGGER): Đây là chân đầu vào thấp hơn điện áp so sánh và được dùng như 1 chân chốt hay ngõ vào của 1 tần so áp.Mạch so sánh ở đây dùng các transitor PNP với mức điện áp chuẩn là 2/3Vcc.
+ Chân số 3(OUTPUT): Chân này là chân dùng để lấy tín hiệu ra logic. Trạng thái của tín hiệu ra được xác định theo mức 0 và 1. 1 ở đây là mức cao nó tương ứng với gần bằng Vcc nếu (PWM=100%) và mức 0 tương đương với 0V nhưng mà trong thực tế mức 0 này ko được 0V mà nó trong khoảng từ (0.35 ->0.75V) .
+ Chân số 4(RESET): Dùng lập định mức trạng thái ra. Khi chân số 4 nối masse thì ngõ ra ở mức thấp. Còn khi chân 4 nối vào mức áp cao thì trạng thái ngõ ra tùy theo mức áp trên chân 2 và 6.Nhưng mà trong mạch để tạo được dao động thường hay nối chân này lên VCC.
+ Chân số 5(CONTROL VOLTAGE): Dùng làm thay đổi mức áp chuẩn trong IC 555 theo các mức biến áp ngoài hay dùng các điện trở ngoài cho nối GND. Chân này có thể không nối cũng được nhưng mà để giảm trừ nhiễu người ta thường nối chân số 5 xuống GND thông qua tụ điện từ 0.01uF đến 0.1uF các tụ này lọc nhiễu và giữ cho điện áp chuẩn được ổn định.
+ Chân số 6(THRESHOLD) : là một trong những chân đầu vào so sánh điện áp khác và cũng được dùng như 1 chân chốt.
+ Chân số 7(DISCHAGER) : có thể xem chân này như 1 khóa điện tử và chịu điều khiển bỡi tầng logic của chân 3 .Khi chân 3 ở mức áp thấp thì khóa này đóng lại.ngược lại thì nó mở ra. Chân 7 tự nạp xả điện cho 1 mạch R-C lúc IC 555 dùng như 1 tầng dao động .
+ Chân số 8 (Vcc): Không cần nói cũng bít đó là chân cung cấp áp và dòng cho IC hoạt động. Không có chân này coi như IC chết. Nó được cấp điện áp từ 2V -->18V (Tùy từng loại 555 nhé thấp nhất là con NE7555)
- IC L298
Điện áp cấp lên đến 46V
Tổng Dòng DC chịu đựng lên đến 4A
Điện áp bão hòa
Chức năng bảo vệ quá nhiệt
Điện áp logic ‘0’ từ 1.5V trở xuống (lề
min nhiễu lớn)
Giới thiệu
IC L298 là mạch tích hợp đơn chip có kiểu vỏ công suất 15 chân (multiwatt 15) và PowerSO20 (linh kiện dán công suất). Là IC mạch cầu đôi (dual full-bridge) có khả năng hoạt động ở điện thế cao, dòng cao. Nó được thiết kế tương thích chuẩn T TTL và lái tải cảm kháng như relay, cuộn solenoid, động cơ DC và động cơ bước. Nó có 2 chân enable (cho phép) để cho phép/không cho phép IC hoạt động, độc lập với các chân tín hiệu vào. Cực phát (emitter) của transistor dưới của mỗi mạch cầu được nối với nhau và nối ra chân ngoài để nối với điện trở cảm ứng dòng khi cần.
Nó có thêm một chân cấp nguồn giúp mạch logic có thể hoạt động ở điện thể thấp hơn.
HÌNH VỎ NGOÀI L298
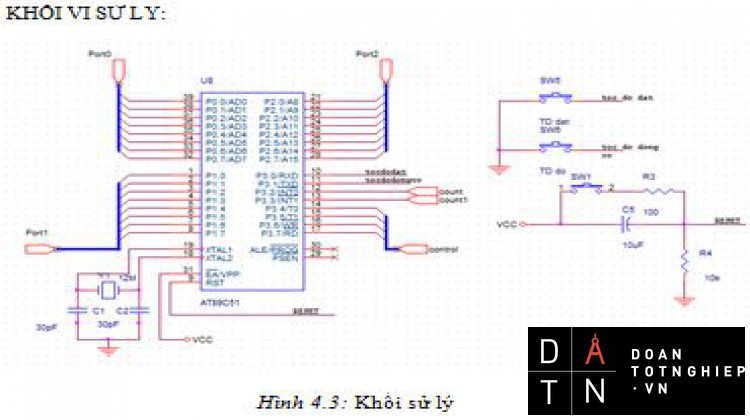
- Vi Xử Lý AT89C51
Đặc điểm và chức năng hoạt động của IC8951 là một họ IC vi điều khiển do hãng Intel của Mỹ sản xuất. Chúng có các đặc điểm chung như sau:
Các đặc điểm của 8951 được tóm tắt như sau :
8 KB EPROM bên trong.
128 Byte RAM nội.
4 Port xuất /nhập I/O 8 bit.
Giao tiếp nối tiếp.
64 KB vùng nhớ mã ngoài
64 KB vùng nhớ dữ liệu ngoại.
Xử lí Boolean (hoạt động trên bit đơn).
210 trí nhớ có thể định vị bit.
4 μs cho hoạt động nhân hoặc chia.
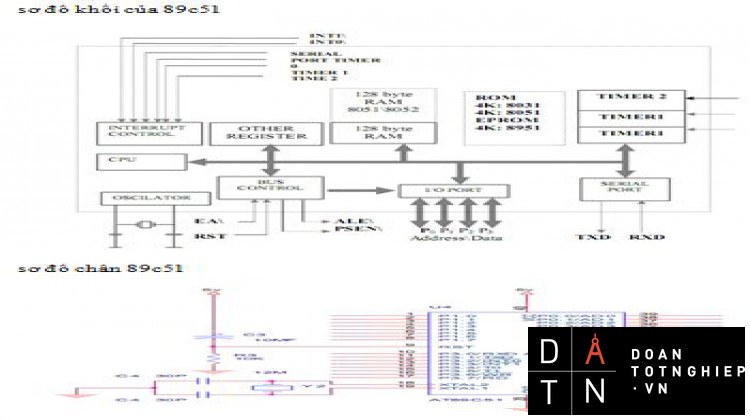
sơ đồ khối của 89c51
sơ đồ chân 89c51
Chức năng các chân của 8951:
8951 có tất cả 40 chân có chức năng như các đường xuất nhập. Trong đó có 24
chân có tác dụng kép (có nghĩa 1 chân có 2 chức năng), mỗi đường có thể hoạt động như đường xuất nhập hoặc như đường điều khiển hoặc là thành phần của các bus dữ liệu và bus địa chỉ
- một số linh kiện khác được xử dụng
+ IC OP07
+ ADC 0804 chuyển đổi tín hiệu xung sang tín hiệu số
+ DAC0808 chuyển đổi tín hiệu số sang xung
Và một số linh kiện khác
TÀI LIỆU THAM KHẢO
- Lý Thuyết Điều Khiển Tự Động
- Họ Vi Điều Khiển 8051
Của : Tống Văn Ơn và Hoàng Đức Hải
- Kỹ Thuật Điện
Của: Nguyễn Kim Đính
- Bộ Khuếch Đại Xử Lý Và IC Tuyến Tính
- Và trên mạng Internet











