Thiết kế và chế tạo hệ thống robot tay gắp sản phẩm
NỘI DUNG ĐỒ ÁN
Thiết kế và chế tạo hệ thống robot tay gắp sản phẩm
LỜI NÓI ĐẦU
Thế kỷ 21 là thế kỷ của khoa học kỹ thuật hiện đại và tiên tiến, nó đi sâu vào toàn bộ đời sống con người trên Trái Đất, giúp con người trong mọi lĩnh vực, nó thay đổi cơ bắp con người từ những việc đơn giản đến phức tạp.
Sự phát triển của ngành cơ khí cùng với sự ứng dụng công nghệ mới đã đáp ứng được nhu cầu ngày càng cao của con người. Sự xuất hiện của Robot đã làm thay đổi toàn bộ nền công nghiệp trên Trái Đất. Từ đó tôi đã chọn đề tài “ Thiết kế và chế tạo hệ thống tay gắp sản phẩm” với mục đích vận dụng những kiến thức đã học và tìm hiểu thêm về lĩnh vực tự động hóa.
Trong quá trình thiết kế đồ án, với sự hướng dẫn tận tình của thầy và sự nổ lực của bản thân. Đến nay nhiệm vụ đã hoàn thành, mặc dù rất cố gắng tìm hiểu và tính toán nhưng chắc chắn không tránh khỏi những thiếu sót hạn chế. Rất mong được sự hướng đẫn thêm của thầy để đề tài này được hoàn thiện hơn.
Xin trân trọng cảm ơn.
Phần I: TỔNG QUAN VẤN ĐỀ NGHIÊN CỨU
Sơ lược quá trình phát triển của Robot công nghiệp.
Thuật ngữ Robot xuất phát từ tiếng Czech “Robota” trong vở kịch “Rossum’s Universal Robot” tại New York vào ngày 09/11/1922 do nhà soạn kịch người Tiệp Khắc Karen Papek viết năm 1921, trong tiếng Tiệp “Robota” nghĩa là công việc lao dịch.
Nhưng Robot thực sự có ích được nghiên cứu để ứng dụng vào trong công nghiệp lại là những tay máy. Vào năm 1948, nhà nghiên cứu người Đức Goertz đã nghiên cứu chế tạo thành công loại tay máy đôi điều khiển từ xa đầu tiên, và cùng năm đó hãng General Mills chế tạo tay máy tương tự sử dụng cơ cấu tác động là những động cơ điện kết hợp với các cử hành trình. Đến năm 1954, Goertz tiếp tục chế tạo một dạng tay máy đôi sử dụng động cơ Servo và có thể nhận biết lực tác động lên khâu cuối. Sử dụng thành quả đó, vào năm 1956 hãng General Mills cho ra đời tay máy hoạt động trong công việc khảo sát đáy biển. Đầu thập kỷ 60, công ty AMF (American Machine and Foundry Company) quảng cáo một loại máy tự động vạn năng gọi là “Người máy công nghiệp”. Ngày nay người ta đặt tên người máy công nghiệp (Robot công nghiệp) cho những thiết bị có dáng dấp và một vài chức năng như tay người được điều khiển tự động để thực hiện một số thao tác sản xuất.
Năm 1968 R.S Mosher, thuộc hãng General Electric, đã chế tạo một thiết bị biết đi có 4 chân sử dụng động cơ đốt trong, cũng trong lĩnh vực này một thành tựu khoa học công nghệ đáng kể đã đạt được vào năm 1970 là xe tự hành thám hiểm mặt trăng Lunokohod 1 được điều khiển từ Trái Đất.
Xe tự hành thám hiểm Mặt Trăng Lunokohod 1
Viện nghiên cứu thuộc đại học Stanford vào năm 1969 đã thiết kế về Robot Shakey di động tinh vi hơn để thực hiện những thí nghiệm về điều khiển sử dụng hệ thống thu nhận hình ảnh để nhận dạng đối tượng. Robot này được lập trình để nhận dạng đối tượng bằng Camera, xác định đường đi đến đối tượng và thực hiện một số tác động trên đối tượng.
Robot Shakey Tàu thám hiểm Viking
Năm 1952 máy điều khiển số đầu tiên ra đời tại Đại học Công nghệ Massachusetts (Mỹ). Trên cơ sở đó năm 1954, Georde Devol đã thiết kế Robot lập trình trên cơ sở chương trình số đầu tiên nhờ một thiết bị do ông phát minh được gọi là thiết bị chuyển khớp được lập trình. Joneph Engelberger người mà ngày nay thường được gọi là cha đẻ của Robot công nghiệp đã thành lập hãng Unimation sau khi mua bản quyền thiết bị của Devol và sau đó phát triển những thế hệ Robot điều khiển theo chương trình. Năm 1962, Robot Unimation đầu tiên được đưa vào sử dụng tại hãng General Motors.
Năm 1974 công ty Mỹ Cincinati đưa ra loại Robot T3 (The Tomorrow Tool: Công cụ của tương lai), vào năm 1976 cánh tay Robot đầu tiên trong không gian được sử dụng trên tàu thám hiểm Viking của cơ quan hàng không vũ trụ Mỹ NASA để lấy mẫu đất trên Sao Hỏa.
Dưới đây chúng ta sẽ điểm qua một số thời điểm lịch sử phát triển của người máy công nghiệp.
- Từ những năm 50 ở Mỹ xuất hiện viện nghiên cứu đầu tiên.
- Đầu những năm 60 xuất hiện sản phẩm đầu tiên tên Versatran của công ty AMF.
- Ở Anh người ta bắt đầu nghiên cứu và chế tạo các Robot theo bản quyền của Mỹ từ năm 1967.
- Ở các nước Tây Âu khác như: Đức, Ý, Pháp, Thụy Điển, từ những năm 70.
- Châu Á có Nhật Bản bắt đầu nghiên cứu ứng dụng Robot từ năm 1986.
Đến nay trên thế giới có khoảng trên 200 công ty sản xuất Robot trong số đó có 80 công ty của Nhật, 90 công ty của các nước Tây Âu, 30 công ty của Mỹ và một số công ty khác ở Nga…
Phân loại tay máy công nghiệp.
Trong công nghiệp người ta sử dụng những đặc điểm khác nhau cơ bản nhất của Robot để giúp cho việc nhận xét được dể dàng. Có 4 yếu tố chính để phân loại:
- Theo hình dáng hình học của không gian.
- Robot tọa độ vuông góc: Robot này có 3 bậc tự do tịnh tiến theo 3 phương vuông góc.
- Robot tọa độ trụ: Robot này có 3 chuyển động tịnh tiến cơ bản gồm 2 trục tịnh tiến và 1 trục quay.
- Robot khớp bản lề: Robot này có 3 chuyển động quay.
- Theo thế hệ:
- Robot thế hệ thứ nhất: Gồm các Robot hoạt động lặp lại theo một chu trình không thay đổi.
- Robot thế hệ thứ hai: Robot này được trang bị các bộ phận cảm biến cho phép cung cấp các tín hiệu phản hồi hổ trợ lại cho hệ thống điều khiển.
- Robot thế hệ thứ ba: Robot được trang bị những thuật toán xử lý các phản xạ logic thích nghi.
- Robot thế hệ thứ tư: Robot sử dụng các thuật toán và cơ chế điều khiển thích nghi được trang bị bước đầu khả năng lựa chọn các đáp ứng tuân theo một mô hình toán xác định.
- Robot thế hệ thứ năm: Robot được trang bị trí tuệ nhân tạo
Đối với tay máy công nghiệp đã có hơn 250 loại, trong đó có hơn 40% là tay máy có kiểu điều khiển đơn giản thuộc thế hệ thứ nhất.
- Theo bộ điều khiển:
- Robot gắp – đặt: Robot này thường nhỏ và sử dụng nguồn dẫn động khí nén. Bộ điều khiển phổ biến là bộ khả lập trình PLC.
- Robot đường dẫn liên tục: Robot sử dụng bộ điều khiển Servo thực hiện điều khiển vòng kín.
- Theo hệ thống truyền động:
- Hệ truyền động điện
- Hệ truyền động thủy lực
- Hệ truyền động khí nén
Sự xuất hiện của Robot và sự gia tăng vai trò của chúng trong sản xuất và xã hội loài người làm xuất hiện một ngành khoa học mới là ngành Robot học (Robotic), trên thế giới đã xuất hiện nhiều viện nghiên cứu về Robot. Ở Việt Nam, từ những năm giữa thập kỷ 80 đã có viện nghiên cứu về Robot.
Tình hình phát triển của Robot trên thế giới.
Sự phát triển của khoa học kỹ thuật ngày càng nhanh góp phần nâng cao năng suất lao động. Đặt biệc là sự ra đời và phát triển của ngành công nghệ chế tạo Robot nhằm tạo ra sự tự động hóa trong quá trình sản xuất giảm đi sức lao động bằng chân tay của người lao động.
Tự động hóa đã trở thành một trong những ngành mũi nhọn của nhiều nước trên thế giới, với sự phát triển không ngừng của công nghệ bán dẫn, công nghệ thông tin, trí tuệ nhân tạo và cơ khí chính xác, Robot không còn là những cổ máy vô tri vô giác biết lặp lại một công việc nhất định mà nó bắt đầu có cảm xúc và hoạt động như một sinh vật. Từ đó ngành tự động hóa mở ra nhiều ứng dụng phong phú, những thế hệ Robot gần giống con người lần lượt được các hãng như HONDA, ASIMO, MITSUBISHI, SONY,… cho ra đời chứng tỏ sự phát triển va tương lai của ngành tự động hóa là rất mạnh mẽ.
Tình hình phát triển của ngành tự động hóa và Robot tại Việt Nam.
Riêng nước ta, lĩnh vực này còn khá mới mẽ, chúng ta đang ở giai đoạn đầu của thời kỳ công nghiệp hóa và hiện đại hóa đất nước. Đa số các máy móc của chúng ta trong các nhà máy đều đã lỗi thời và hết sức lạc hậu. Việc đầu tư mới các thiết bị tự động hóa là hết sức quan trọng nhưng phần lớn hiện nay các thiết bị đều ngoại nhập mà chưa thể chế tạo được. Để có thể làm được điều đó chúng ta cần có một lực lượng hùng hậu cả về số lượng lẫn trình độ chuyên môn với sự đầu tư về trang thiết bị lẫn cơ sở vật chất. Nhiều cuộc thi về tự động hóa diễn ra nhằm khuyến khích lòng say mê sáng tạo trong giới trẻ đã được tổ chức như ROBOCON, EUREKA,… đã nhận được sự ủng hộ nhiệt tình trong giới sinh viên góp phần tích cực vào thúc đẩy đam mê và lòng ham thích của sinh viên Việt Nam trên con đường xây dựng đất nước.
Dưới đây là một số tay gắp hàng tiêu biểu đã được chế tao.
- Tay gắp hàng phân loại sản phẩm theo màu, truyền động bằng Xi Lanh khí nén và cảm biến màu sắc được điều khiển bằng bộ khả lập trình PLC. Do một số sinh viên khóa 09 khoa Cơ Khí – DHBK Đà Nẵng chế tạo.
- Tay gắp phân loại sản phẩm theo màu 3 bậc tự do, 1 khớp quay bằng động cơ servo, 2 trục tịnh tiến và cơ cấu kẹp truyền động bằng Xi Lanh khí nén, điều khiển bằng PLC S7-200. Do một số sinh viên ĐH Giao Thông Vận Tải TP-HCM chế tạo.
- Tay gắp sản phẩm 6 bậc tự do, có các khớp quay được truyền động bằng động cơ bước, điều khiển bằng vi điều khiển PIC. Do các sinh viên khoa Điện-Điện Tử DHBK TP-HCM chế tạo.
- Tay Robot 3 bậc tự do thuộc kiểu Robot tọa độ cầu có 3 khớp quay truyền động bằng động cơ bước và điều khiển bằng vi điều khiển. Do các sinh viên khóa 05 ngành Cơ-Điện tử DHBK Đà Nẵng chế tạo.
- Tay Robot 3 bậc tự do phục vụ cho việc học tập, giảng dạy của trường DH dân lập Hải Phòng. Do ThS Ngô Quang Vĩ chế tạo, truyền động bằng động cơ servo, điều khiển trên nền tảng LabView.
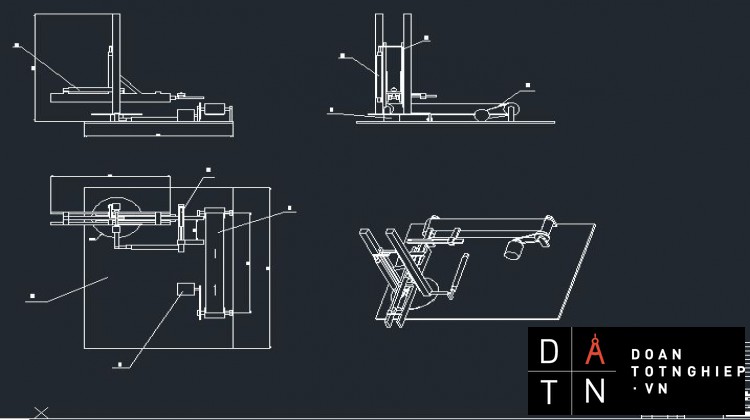
Phần II:THIẾT KẾ MÁY
- Phân tích chọn phương án thiết kế.
Muốn xác định được vật thể trong không gian ta cần phải biết được phương hướng, vị trí tọa độ của vật thể cần tiếp cận. Về mặt lý thuyết thì một khâu trong không gian có 6 bậc tự do đó là chuyển động tịnh tiến và quay lần lược quanh các trục trong hệ tọa độ Descarde.Thực tế thì Robot chỉ có một số bậc tự do nhất định như tịnh tiến hoặc quay.
Dưới đây là một số kết cấu tay máy điển hình:
Để gắp sản phẩm từ vị trí 1 sang vị trí 2 thì có các phương án sau.
- Phương án 1.
Dùng tay gắp tọa độ vuông góc: Có 3 chuyển động tịnh tiến theo 3 phương vuông góc nhau.
................................



