THIẾT KẾ VÀ THI CÔNG MÔ HÌNH BIẾN TẦN LS - SV004IG5A
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN BIẾN TẦN LS - SV004IG5A , thuyết minh THIẾT KẾ VÀ THI CÔNG MÔ HÌNH, BIẾN TẦN LS - SV004IG5A
MỞ ĐẦU
Ngày nay quá trình công nghiệp hóa hiện đại hóa đất nước đang trên đà phát triển.Thì việc ứng dụng các công nghệ mới và các phương pháp sản xuất mới là điều rất quan trọng.Vì thế để có 1 hệ thống sản xuất hiện đại, ổn định và tiết kiệm điện năng , cũng như tiết kiệm chi phí sản xuất là điều rất quan trọng.
Theo ta biết thì hệ thống truyền động điện các dây truyền sản suất dùng động cơ không đồng bộ 3 pha thì có rất nhiều ưư điểm như : kết cấu đơn giản,dễ sử dụng, độ bền cao… nhưng nếu sử dụng các thiết bị điều khiển đơn giản thì sẽ tồn tại 1 số nhược điểm như :
Dòng khởi động lớn gấp 4 – 6 lần dòng định mức của động cơ,điều này sẽ làm ảnh hưởng xấu đến cả hệ thống đang vận hành đồng thời cũng như giảm tuổi thọ động cơ điện.Mặc khác tốc độ vòng quay của động cơ điện cảm ứng chỉ điều khiển cho từng cấp trong khi 1 hệ thống sản xuất yêu cầu phải được điều khiển tốc độ liên tục theo momen và phụ tải thay đổi….
Mặc khác thì việc khởi động và dừng động cơ không đồng bộ công suất vừa và lớn theo phương pháp khởi động trực tiếp sẽ gây sụt áp và tổn hao điện năng trên đường dây đáng kể…
Do sự phát triển vượt bậc của kỹ thuật vi điện tử và điện tử công suất nên ngày càng có nhiều loại thiết bị điều khiển động cơ điện không đồng bộ với các chức năng hoàn hảo (thuận tiện trong sử dụng, an toàn và có khả năng tiết kiệm điện tối đa) mà “ biến tần AC ” là một điển hình.
Vì vậy việc sử dụng biến tần trong sản xuất là rất cần thiết để có 1 hệ thống ổn định và tiết kiệm năng lượng.
LỜI CẢM ƠN
Chúng em xin gửi lời cảm ơn chân thành nhất đến quý Thầy Cô trường , những người đã dìu dắt chúng em tận tình, đã truyền đạt cho chúng em những kiến thức và kinh nghiệm quý báo trong suốt thời gian chúng em học tại trường.
Chúng em xin trân trọng gửi lời cảm ơn đến tất cả các Thầy , Cô Khoa Điện – Điện Lạnh.Đặc biệt là thầy Đỗ Chí Phi đã tận tình hướng dẫn , giúp đỡ , tạo mọi điều kiện thuận lợi để chúng em hòan thành tốt đồ án tốt nghiệp này.
Chúng em xin cảm ơn đến gia đình, những người thân đã cho em những điều kiện tốt nhất để học tập trong suốt thời gian dài.
Ngoài ra chúng em cũng xin gửi lời cảm ơn đến những người bạn , những người đã cùng gắn bó, cùng học tập và giúp đỡ em trong những năm qua cũng nhưng trong suốt quá trình thực hiện đồ án tốt nghiệp này.
Dù đã có nhiều cố gắng trong quá trình thực hiện đồ án nhưng cũng không tránh những thiếu sót, khuyết điểm.Vì vậy chúng em rất mong có những ý kiến đóng góp của quý Thầy Cô để chúng em có thể rút những bài học kinh nghiệm quý giá.
MỤC LỤC
Mở đầu Trang
Chương 1 KHÁI QUÁT CÁC PHƯƠNG PHÁP .... .... .... 1
ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ.
1.1 Khái niệm chung 1
1.2 Cấu tạo động cơ không đồng bộ
1.3 Nguyên lý làm việc của động cơ không đồng bộ 2
1.4 Phân loại động cơ không đồng bộ 3
1.4.1.Phân theo kết cấu vỏ máy
1.4.2.Phân theo số pha
1.5 Các đại lượng định mức của động cơ không đồng bộ
1.6 Điều chỉnh tốc độ động cơ không đồng bộ 4
1.6.1.1 Nguyên lý điều chỉnh:
1.6.1.2 Các phương pháp điều chỉnh
1.6.1.2.1 Phương pháp đổi nối sao tam giác
1.6.1.2.2 Phương pháp dùng bộ điều chỉnh điện áp bằng thyristor
1.6.1.2.3 Nhận xét và ứng dụng 6
1.6.2 Thay đổi tốc độ bằng cách điều chỉnh điện trở Roto 7
1.6.3. Điều chỉnh tốc độ bằng cách thay đổi tần số nguồn 8
1.6.3.1 Nguyên lý điều chỉnh tần số
1.6.3.1.1 Nguyên lý chung
1.6.3.1.2 Luật điều chỉnh tần số
1.6.3.1.3 Luật điều khiển từ thông khe hở không đổ
CHƯƠNG 2: TỔNG QUAN VỀ BIẾN TẦN 12
2.1.Tổng quan về biến tần
2.1.1.Khái niệm
2.2.Phân loại biến tần
2.2.1.Biến tần trực tiếp
2.2.2.Biến tần gián tiếp 13
2.2.2.1.Biến tần nguồn dòng
2.2.2.2.Biến tần nguồn áp 14
2.2.2.3.Biến tần nguồn áp biến điệu bề rộng xung 15
2.2.3.Các phương pháp thông dụng điều khiển bộ nghịch lưu áp 16
2.2.3.1 Phương pháp điều khiển V/F
2.2.3.1.1 Phương pháp điều khiển E/F
2.2.3.1.2 Phương pháp V/f 17
2.2.3.2.Phương pháp điều chế độ rộng xung (SinPWM)
CHƯƠNG 3: BIẾN TẦN SV004IG5A – 4 21
3.1 Giới thiệu về biến tần SV004IG5A – 4
3.1.1 Tên gọi :
3.1.2 Các thông số kỹ thuật cơ bản :
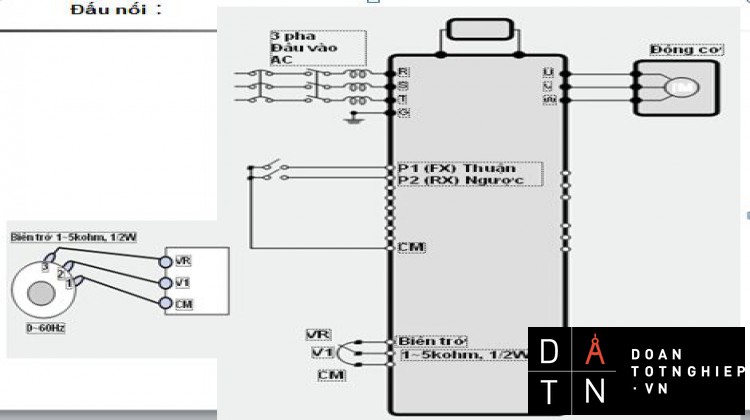
3.1.3 Sơ đồ đấu nối 24
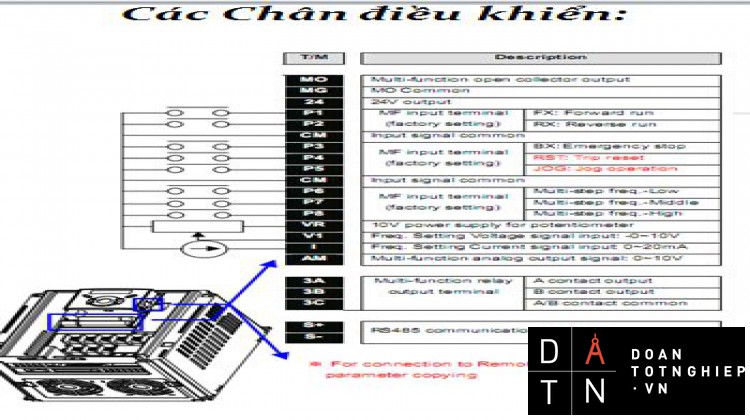
3.1.4 Sơ đồ đấu chân : 25
3.1.4.1 Các chân mạch động lực :
3.1.4.2 Các chân mạch điều khiển : 26
3.2 Hướng dẫn cài đặt thông số điều chỉnh 27
3.2.1 Bàn phím
3.2.2 Di chuyển tới các nhóm 28
3.2.3 Cách thay đổi thời gian tăng tốc từ 5.0s đến 16.0s 30
3.2.4 Cách thay đổi mã trong nhóm Điều khiển 31
3.3 Danh sách nhóm chức năng
3.3.1 Nhóm Điều khiển
3.3.2 Nhóm chức năng 1 33
3.3.3 Nhóm chức năng 2 36
3.3.4 Nhóm I/0 42
3.3.5 Các chức năng bảo vệ 47
3.3.6 Khắc phục lỗi 49
3.4 Một số chức năng cơ bản 52
3.4.1 Phương pháp cài đặt tần số
3.4.1.1 Bàn phím 1 53
3.4.1.2 Bàn phím 2
3.4.1.3 Ngõ vào 0 ~ 10V dùng biến trở
3.4.1.4 Ngõ vào 0 ~ 20 mA 54
3.4.1.5 Giữ Analog
3.4.1.6 Cài đặt nhiều tần số 55
3.4.1.7 Tần số Jog 56
3.4.1.8 Tăng – Giảm 57
3.4.2 Bộ điều khiển PID 59
Chương 4 : Thi Công Mô Hình 61
4.1 Cấu hình cơ bản của mô hình
4.2 Sơ đồ khối bộ biến tần 62
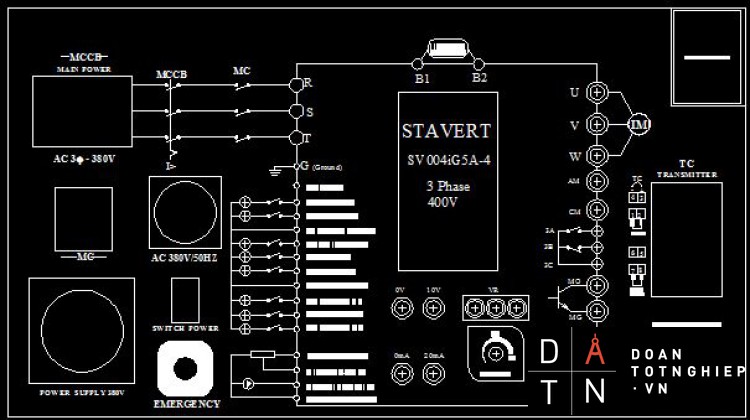
4.3 Thiết kế mô hình biến tần 63
4.3.1 Bố trí các thiết bị trên mô hình
4.3.2 Sơ đồ đấu dây 64
4.4 Nguồn cấp tín hiệu Analog 65
4.4.1 Analog 0 ~ 20 mA
4.4.2 Analog 0 ~ 10v
4.5 Thi công và lắp ráp
CHƯƠNG 5: KẾT QUẢ ĐẠT ĐƯỢC 66
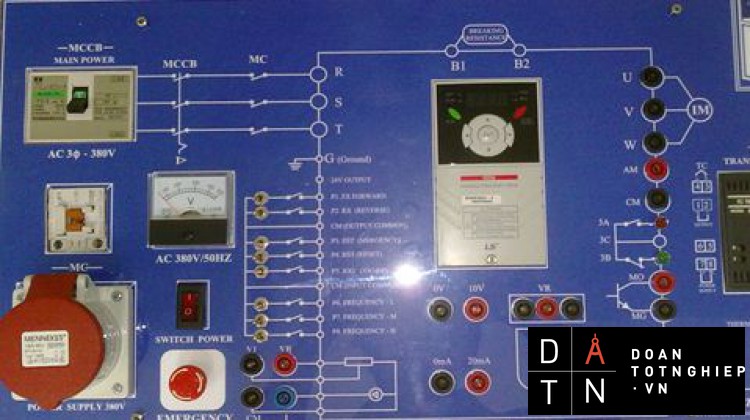
5.1 Mô hình
5.2 Chạy Thử 67
5.3 Các quá trình điều khiển dưới dạng tín hiệu vào Analog 70
5.3.1 Tín hiệu Analog 0 ~ 10v
5.3.2 Tín hiệu Analog 0 ~ 20 mA 72
Kết Luận
CHƯƠNG I:KHÁI QUÁT CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ.
1.1 Khái niệm chung :
Động cơ không đồng bộ là máy điện xoay chiều , làm việc theo nguyên lý cảm ứng điện từ , có tốc độ n của rotor khác với tốc độ từ trường quay trong động cơ. Động cơ không đồng bộ được sử dụng rộng rãi trong sản xuất và trong sinh hoạt vì chế tạo đơn giản , giá thành rẻ , độ tin cậy cao , vận hành đơn giản , hiệu suất cao và hầu như không bảo trì . Gần đây do kỹ thuật điện tử phát triển , nên động cơ không đồng bộ đã đáp ứng được yêu cầu điều chỉnh tốc độ vì vậy động cơ không đồng bộ càng được sử dụng rộng rãi hơn .Dãy công suất của nó rất rộng từ vài W đến hàng ngàn kW . Hầu hết là động cơ ba pha , có một số động cơ công suất nhỏ là một pha .
1.2 Cấu tạo động cơ không đồng bộ :
Hình 1.1 : Cấu tạo bên trong của Động Cơ Không Đồng Bộ
Cấu tạo động cơ không đồng bộ gồm hai bộ phận chính là stator và rotor , ngoài ra còn có vỏ máy , nắp máy và trục máy . Trục máy làm bằng thép , trên đó gắn rotor , ổ bi và phía cuối có gắn một quạt gió đẻ làm mát máy dọc trục .
- Stator: gồm hai bộ phận chính là lõi thép và dây quấn , ngoài ra còn có vỏ máy và nắp máy .
+ Lõi thép : lõi thép có dạng hình trụ , làm bằng các lá thép kỹ thuật điện , được dập rãnh trong rồi ghép lại với nhau tạo thành các rãnh theo hướng trục . Lõi thép được ép vào trong vỏ máy .
+Dây quấn stator : dây quấn stator thuờng được làm bằng dây đồng có bọc cách điện và đặt trong các rãnh của lõi thép . Dòng điện xoay chiều ba pha chạy qua dây quấn ba pha stator sẽ tạo nên từ trường quay .
+Vỏ máy :vỏ máy gồm thân và nắp làm bằng gang .
- Rôto: gồm lõi thép, dây quấn và trục máy.
+Lõi thép : lõi thép rôtor gồm các lá thép kỹ thuật điện được lấy từ phần bên trong của lõi thép stator ghép lại , mặt ngoài dập rảnh để đặt dây quấn , ở giữa có dập lỗ để lắp trục .
+Trục: trục của động cơ không đồng bộ làm bằng thép , trên có gắn lõi thép rôtor.
+Dây quấn :dây quấn động cơ không đồng bộ có hai kiểu : rôtor ngắn mạch còn gọi là rôtor lồng sóc và rôto dây quấn .
Rôto lồng sóc gồm các thanh đồng hoặc thanh nhôm đặt trong rảnh và bị ngắn mạch bởi hai vành ngắn mạch ở hai đầu .Với động cơ nhỏ , dây quấn rôto được đúc nguyên khối thành thanh dẫn , vành ngắn mạch , cánh tản nhiệt và cánh quạt làm mát . Các động cơ công suất trên 100 kW thanh dẫn làm bằng đồng được đặt vào các rãnh rôtor và gắn chặt vào vành ngắn mạch .
Rôto dây quấn cũng như dây quấn stator và có cùng số đôi cực từ như dây quấn stator . Dây quấn kiểu này luôn đấu kiểu sao và ba đầu ra đấu vào ba vành trượt , gắn vào trục quay của rôto và cách điện với trục . Ba chổi than cố định và luôn tỳ trên vành trượt này để dẫn điện vào một biến trở cũng nối sao nằm ngoài động cơ để khởi động hoặc điều chỉnh tốc độ.
1.3 Nguyên lý làm việc của động cơ không đồng bộ :
Động cơ không đồng bộ làm việc dựa trên hiện tượng cảm ứng điện từ .
Khi nối dây quấn stator vào lưới điện xoay chiều ba pha trong động cơ sẽ tạo ra một từ trường quay. Từ trường này quét qua các thanh dẫn rôto, làm cảm ứng trên dây quấn rôto một sức điện động e2 sẽ sinh ra dòng điện i2 chạy trong dây quấn. Từ trường quay cắt các thanh dẫn của rôto, cảm ứng một sức điện động, vì dây quấn rotor nối ngắn mạch, nên sức điện động sẽ sinh ra một dòng điện trong các thanh dẫn rotor. Lực tác dụng tương hỗ giữa từ trường quay của máy với thanh dẫn mang dòng điện rotor, kéo rotor quay theo chiều quay của từ trường. Chiều của sức điện động và chiều dòng điện được xác định theo quy tắc bàn tay phải, ta căn cứ vào chiều quay tương đối của thanh dẫn với từ trường.
Hình 1.2 Sơ đồ nguyên lí động cơ không đồng bộ
Trên hình 1.2 vẽ từ trương quay tốc độ n1, chiều sức điện động và dòng điện cảm ứng trong thanh rôto, chiều các lực điện từ. Nếu coi từ trường đứng yên, thì chiều chuyển động tương đối thanh dẫn ngược chiều với n1, từ đó áp dụng quy tắc bàn tay phải, xác định chiều sức điện động như hình vẽ.
Chiều điện từ xác định theo quy tắc bàn tay trái, trùng với chiều quay n1.
Tốc độ quay n của rôto luôn nhỏ hơn tốc độ từ trường quay n1, vì nếu tốc độ rôto mà bằng tốc độ từ trường quay thì không có sự chuyển động tương đối, trong dây quấn rôto không có sức điện động và dòng cảm ứng dẫn đến lực điện từ bằng không.. Do mômen cản phần cảm sẽ quay chậm lại sau từ trường và các dây dẫn phần cảm lại bị từ trường quay qua , dòng điện cảm ứng lại xuất hiện và do đó laị mômen quay lẫn phần cảm tiếp tục quay theo từ trường nhưng với tốc độ luôn nhỏ hơn tốc độ từ trường .Tốc độ từ trường quay là ω 0 (rad/s) hay n0 (vòng/phút) thì tốc độ quay của phần cảm ω hay n luôn nhỏ hơn ω < ω 0 , n < n0 .Sai lệch tương đối giữa hai tốc độ gọi là độ trượt s .
ω = ω0(1-s) hay n = n0 (1-s )
với :
f1 - tần số lưới
Tốc độ ω0 (rad/s) hay n0 (vòng/phút) là tốc độ lớn nhất mà rôto có thể đạt
được nếu không có lực cản nào . Tốc độ này gọi là tốc độ không tải lý tưởng hay tốc độ đồng bộ ở chế động cơ 0 ≤ s≤ 1 .
Dòng điện cảm ứng trong cuộn dây phần ứng ở rotor cũng là dòng xoay chiều với tần số xác định bởi tốc độ tương đối của rotor với từ trường quay.
f2 = [p(n0 - n )]/60 .
1.4 .Phân loại động cơ không đồng bộ:
1.4.1.Phân theo kết cấu vỏ máy :
+Kiểu kín
+Kiểu bảo vệ
+Kiểu hở
1.4.2.Phân theo số pha :
+Một pha
+Ba pha
1.5. Các đại lượng định mức của động cơ không đồng bộ :
+Công suất định mức : Pđm
+Điện áp định mức :Uđm
+Dòng điện định mức :Iđm
+Tốc độ định mức : nđm
+Hiệu suất định mức :
+Hệ số công suất định mức :
1.6. Điều chỉnh tốc độ động cơ không đồng bộ :
Trước đây, nếu có yêu cầu điều chỉnh tốc độ cao thường dùng động cơ điện một chiều. Nhưng ngày nay nhờ kỹ thuật điện tử phát triển nên việc điều chỉnh tốc độ động cơ không đồng bộ không gặp khó khăn mấy với yêu cầu phạm vi điều chỉnh, độ bằng phẳng khi điều chỉnh và năng lượng tiêu thụ.
Ta thấy các phương pháp điều chỉnh chủ yếu có thể thực hiện :
+ Trên stato : Thay đổi điện áp U đưa vào dây quấn stato, thay đổi số đôi cực từ p dây quấn stato và thay đổi tần số f nguồn điện.
+ Trên rôto : Thay đổi điện trở rôto, nối cấp hoặc đưa sđđ phụ vào rôto.
1.6.1. Điều chỉnh tốc độ bằng cách thay đổi điện áp:
1.6.1.1 Nguyên lý điều chỉnh:
Khi thay đổi điện áp lưới, ví dụ giảm xuống còn x lần (x<1) điện áp định mức
(U = x.U ) thì momen giảm xuống còn x lần: M = x M. Nếu tải không đổi thì tốc độ giảm xuống hệ số trượt tăng. Có thể thay đổi điện áp bằng phương phấp đổi nối sao tam giác, dùng điện kháng nối tiếp với dây quấn stator hoặc rotor để hạ điện áp, cũng có thể dùng transistor.
1.6.1.2 Các phương pháp điều chỉnh :
Phương pháp điều chỉnh tốc độ không đồng bộ bằng cách thay đổi điện áp thực hiện như sau. Để thay đổi điện áp, người ta dùng bộ biến đổi có điện áp ra tùy theo tín hiệu điều khiển đặt vào.
1.6.1.2.1 Phương pháp đổi nối sao tam giác:
Phương pháp này chỉ dùng được với những động cơ khi làm việc bình thường dây quấn stator nối tam giác. Khi động cơ chạy ở chế độ sao điện áp đặt vào cuộn stator là áp pha, khi động cơ chạy ở chế độ tam giác điện áp là điện áp dây. Như vậy khi đổi nối sao tam giác ta đã thay đổi điện áp lần:
1.6.1.2.2 Phương pháp dùng bộ điều chỉnh điện áp bằng thyristor:
Đây là bộ điều chỉnh được ứng dụng ngày càng nhiều trong điều chỉnh tốc độ động cơ không đồng bộ vì có nhiều ưu điểm so với các bộ biến đổi xoay chiều khác như dùng biến áp tự ngẫu, dùng khuếch đại từ, ….
Sơ đồ nguyên lý của hệ dùng bộ điều chỉnh thyristor như hình 1.3
Hình 1.3 Sơ đồ nguyên lý của hệ thống dùng bộ điều chỉnh thyristor.
Bộ điều chỉnh thyristor này tương đối đơn giản gồm sáu thyristor. Khi ở trạng thái xác lập, các thyristor mở ở những góc kích như nhau và không đổi. Khi đó t1, t3, t5 dẫn ở nữa chu kỳ dương còn t2, t4, t6 dẫn ở nữa chu kỳ âm của lưới điện. Điện áp đặt vào stato của động cơ u2 (điện áp ra của bộ biến đổi) là những phần của đường hình sin trên hình 1.4
Hình 1.4 Đồ thị điện áp pha ở đầu ra của bộ điều chỉnh thyristor
Giả thiết đường cong trên hình 2.4 là đồ thị điện áp của pha A đưa vào stator của động cơ qua hai thyristor t1 và t4. Nếu t1 mở ở góc = 0 thì t1 sẽ dẫn cho đến thời điểm do điện áp lưới dương đặt vào anot và sau đó vẫn dẫn từ - đến + là nhờ năng lượng điện từ tích lũy trong dây quấn stator.
Tương tự thyristor t4 dẫn ở nữa chu kỳ âm và góc phụ thuộc vào độ trượt s. Để dựng đặc tính cơ điều chỉnh, ta bỏ qua điện trở của thyristor. Khi thyristor đang dẫn và các đặc tính điều chỉnh ứng với những góc khác nhau được vẽ trên hình 1.5. Vì điện áp phụ thuộc vào góc pha nên độ trượt tới hạn của các đặc tính điều chỉnh có thể khác với độ trượt st .
Hình 1.5 Các đặc tính điều chỉnh tốc độ động cơ không đồng bộ dùng bộ điều chỉnh thyristor.
1.6.1.2.3 Nhận xét và ứng dụng:
Phương pháp điều chỉnh tốc độ động cơ không đồng bộ bằng cách thay đổi điện áp nguồn được sử dụng rộng rãi, nhất là bộ điều chỉnh dùng thyristor vì thực hiện dễ dàng và tự động hóa. Xét về chỉ tiêu năng lượng, tuy tổn thất trong bộ biến đổi không đáng kể nhưng điện áp stator bị biến dạng so với hình sin nên tổn thất phụ trong động cơ lớn do đó hiệu suất không cao.
Phương pháp điều chỉnh tốc độ động cơ bằng cách thay đổi điện áp thường dùng trong hệ truyền động mà mômen tải là hàm tăng theo tốc độ như quạt thông gió, bơm ly tâm, …
- Thay đổi tốc độ bằng cách điều chỉnh điện trở Roto :
Đây là phương pháp điều chỉnh tốc độ đơn giản và được sử dụng rộng rải trong thực tế nhất là đối với các động cơ không đồng bộ roto quấn dây.
Sơ đồ nguyên lý, đặc tính cơ của động cơ khi thay đổi điện trở phụ mạch roto như hình 1.6.
Hình 1.6 Điều chỉnh khi thay đổi điện trở phụ trên mạch roto
Hình 1.6.a Sơ đồ nguyên lý
hình 1.6 b Đặc tính cơ của động cơ khi thay đổi điện trở phụ
Khi động cơ đang làm việc ở trạng thái xác lập với tốc độ n. Muốn điều chỉnh tốc độ của động cơ, ta đóng điện trở phụ vào cả ba pha của roto. Tại thời điểm bắt đầu đóng điện trở phụ vào thì tốc độ động cơ chưa kịp thay đổi, lúc này dòng và mômen giảm nên tốc độ động cơ giảm. Nhưng khi tốc độ giảm thì độ trượt sẽ tăng nên sức điện động cảm ứng trên mạch roto e2 tăng, do đó dòng ở mạch roto và mômen tăng làm cho tốc độ của động cơ tăng. Khi đưa điện trở phụ vào mạch roto thì hệ số trượt ứng với mômen cực đại lúc này là
Do đó, khi thay đổi điện trở phụ rf trong mạch roto thì hệ số trượt stf sẽ thay đổi và làm cho tốc độ động cơ thay đổi.
Từ các đường đặc tính trên hình vẽ (1.6b), ta thấy với trị số phụ tải không đổi, rf càng lớn thì động cơ làm việc với tốc độ càng thấp.
rf1 < rf2 < rf3
ncb > n1 > n2 > n3
Khi mc bằng hằng số thì động cơ làm việc xác lập tương ứng với các điểm a, b, c, d tốc độ của động cơ càng thấp thì tổn hao càng lớn, độ cứng của đường đặc tính cơ bị giảm. Khi cho điện trở phụ vào càng lớn thì phạm vi điều chỉnh tốc độ phụ thuộc vào trị số phụ tải và phụ tải càng lớn thì phạm vi điều chỉnh càng hẹp.
1.6.3. Điều chỉnh tốc độ bằng cách thay đổi tần số nguồn:
1.6.3.1 Nguyên lý điều chỉnh tần số.
1.6.3.1.1 Nguyên lý chung:
Khi điều chỉnh tần số của nguồn điện cấp cho động cơ, tốc độ đồng bộ hoặc tốc độ từ trường quay ω1 thay đổi ω = 2πf/p
Do đó tốc độ động cơ thay đổi vì ω = ω.(1 - s)
Giảm f < f, đồng thời phải giảm điện áp động cơ vì nếu bỏ qua điện trỏ stator động cơ, có thể viết:
U≈ E = k.φ.f.
Nếu giảm f, mà giữ điện áp động cơ không đổi thì từ thông khe hở φ tăng, dẫn đến mạch từ bão hòa dòng từ hóa tăng lên.Quan hệ điện áp stator và tần số f được gọi là quy luật thay đổi tần số. một số quy luật điều chỉnh tần số đã được áp dụng phổ biến là luật thay đổi tần số cơ bản và luật điều chỉnh từ thông không đổi.
1.6.3.1.2 Luật điều chỉnh tần số:
- Luật tới hạn của động cơ không đồng bộ được tính theo:
...................
......................
Trong thực tế luật điều chỉnh (U/f) = hằng số được sử dụng rộng rãi, do đơn giản, dễ thực hiện. Ta sẽ phân tích đặc tính momen động cơ khi điều chỉnh tần số theo luật (U/f=hằng số).
Mômen tới hạn của động cơ được viết lại ở dạng:
M=
Tỉ số hằng số, do đó ở vùng tần số lớn, khi đó R<< f, đặc biệt đối với động cơ công xuất lớn nên có thể coi M = hằng số ở vùng tần số thấp nhất là hệ thống điều chỉnh rộng, không thể bỏ qua R có trị số tương đối lớn so với sụt áp trên điện kháng tản starto nên M sẽ giảm khi giảm vì vậy trong các sơ đồ thực tế luật điều khiển tần số (U/f).
Hằng số, ở vùng tần số lớn khi đó R<< f, đặc biệt đối với động cơ công xuất lớn nên có thể coi M = hằng số ở vùng tần số thấp nhất là hệ thống điều chỉnh rộng không thể bỏ qua R có trị số tương đối lớn so với sụt áp trên điện kháng tản stator nên mômen từ hóa sẽ giảm khi f1 giảm vì vậy trong các sơ đồ thực tế luật điều khiển tần số (U/f) hằng số được hiệu chỉnh với việc tăng điện áp ở vùng tần số thấp.
1.6.3.1.3 Luật điều khiển từ thông khe hở không đổi.
Điều khiển từ thông khe hở không đổi, động cơ không đồng bộ khả năng sinh mômen lớn trong dải điều chỉnh tốc độ rộng, ngay cả ở dải tần số thấp khi ảnh hưởng của điện trở stator lớn. Để duy trì được từ từ thông khe hở không đổi trong dải tốc độ rộng, sức điện động stator sẽ được điều chỉnh tỉ lệ với tần số stator thay cho phương pháp điều chỉnh tỉ lệ điện áp tần số không đổi.
..........................................
Trong đó: – điện cảm từ hóa.
I– dòng điện từ hóa
Các biểuthức trên cho thấy từ thông khe hở tỉ lệ với tỉ số E/ω và do đó tỉ lệ với tích số LI. Do đó nếu điều khiển từ thông khe hở không đổi sẽ đồng nghĩa với điều chỉnh tỉ số Eω không đổi. Nếu mạch từ động cơ không bão hòa và L là hằng số, từ thông khe hở sẽ tỉ lệ với dòng từ hóa. Trong thực tế dòng điện từ hóa có thể duy trì ở trị số định mức ( tương ứng với điện áp, tần số định mức và phụ tải định mức) ở chế độ non tải, dòng điện từ hóa sẽ có giá trị tương đối lớn so với chế độ làm việc bình thường của đông cơ. Theo sơ đồ thay thế, dòng điện roto động cơ I xác định theo biểu thức:
Với Xđiện kháng tản mạch rôto.
Phương trình dòng điện được viết lại ở dạng sau:
Khi điều khiển từ thông khe hở không đổi tức là tỉ số E1/ωs không đổi dòng điện roto là hảm của tốc độ trượt ω2 và không phụ thuộc tần số nguồn cung cấp.
Đặc tính mô men động cơ thay phương trình trên vào ta có phương trình momen có dạng sau:
M = 3p
Khi điều khiển từ thông khe hở không đổi, tức là tỉ số E/ω không đổi dòng điện roto là hãm của tốc độ trượt ωvà không phụ thuộc tần số nguồn cấp.
Đặc tính mô men động cơ:
Thay phương trình trên vào ta có phương trình mômen có dạng sau:
M = 3p
Do từ thông khe hở tỉ lệ với E/ω ứng với một giá trị tốc độ trượt ω, mômen điện động cơ sẽ tỉ lệ với bình phương từ thông khe hở như vậy nếu từ thông khe hở được duy trì không đổi ở các điều kiện làm việc khác nhau, tương tự như dòng điện stato mômen động cơ không phụ thuộc vào ω chỉ phụ thuộc vào ωtức phụ thuộc vào độ trượt. Đặc tính mômen sẽ có dạng như nhau ở các tần số khác.
Trong trường hợp này, từ thông khe hở được duy trì ở giá trị ứng với chế độ không tải và điện áp tần số định mức mômen tới hạn ở mọi tần số sẽ có giá trị không đổi và động cơ khả năng sinh mômen không đổi ở cả dải điều chỉnh tốc độ.
Tốc độ trượt tới hạn:
Tương ứng, mômen tới hạn sẽ xác định theo biểu thức:
M
Như vậy: mômen tới hạn tỉ lệ thuận với bình thường khe hở và tỉ lệ nghịch với trị số điện cảm tản rôto không phụ thuộc điện trở roto. Kết hợp phương trình trên phương trình mômen được viết lại như sau:
M =
Phương trình mômen tổng quát trên đúng với trạng thái làm việc của động cơ và máy phát ở mọi tần số stator.
CHƯƠNG 2: TỔNG QUAN VỀ BIẾN TẦN
2.1.Tổng quan về biến tần:
2.1.1.Khái niệm :
Biến tần là bộ biến đổi nguồn điện áp với các thông số điện áp và tần số không thành nguồn điện áp với các thông số điện áp và tần số thay đổi được . Thông thường biến tần làm việc với nguồn điện áp vào là điện áp lưới nhưng về nguyên tắc biến tần có thể làm việc với bất kỳ nguồn điện áp xoay chiều nào.
2.2.Phân loại biến tần :
Dựa vào nguyên lý hoạt động của nó người ta chia làm hai loại : Biến tần trực tiếp và biến tần gián tiếp .
2.2.1.Biến tần trực tiếp :
Là bộ biến đổi tần số đầu vào f1 thành tần số f2 bằng cách đóng cắt dòng xoay chiều tần số f1.
Biến tần trực tiếp thường được cấu tạo từ những nhóm chỉnh lưu cầu mắc song song ngược.Cho xung lần lượt vào các nhóm đó ta có thể có được dòng điện tải theo yêu cầu.Như vậy điện áp xoay chiều U(f1) chỉ cần qua một van là chuyển ngay ra tải U(f2) vì vậy hiệu suất của bộ biến tần này lớn.
Tuy nhiên cấu trúc trúc của bộ biến tần này phức tạp ,gồm nhiều van nên vấn đề điều khiển gặp nhiều khó khăn , nó chỉ thích hợp cho truyền động điện có công suất lớn ,tốc độ làm việc thấp ,vì việc tần số f2 ở đầu ra phụ thuộc và f1 .
H2.1 Sơ đồ nguên lý biến tần trực tiếp dùng Thyristor .
2.2.2.Biến tần gián tiếp :
Biến tần gián tiếp hay còn gọi là biến tần có khâu trung gian một chiều .Gồm bộ chỉnh lưu để biến đổi nguồn xoay chiều thành một chiều sau đó lại dùng bộ chỉnh lưu để biến đổi nguồn một chiều thành nguồn xoay chiều .Khâu trung gian một chiều đóng vai trò một kho tích lũy năng lượng dưới dạng nguồn áp dùng tụ điện hoặc nguồn dòng dùng cuộn cảm ,tạo ra một khâu cách ly nhất định giữa phụ tải và nguồn điện áp lưới .
Tùy thuộc khâu trung gian làm việc trong chế độ nguồn dòng hay nguồn áp mà biến tần được chia ra làm ba loại chính :
-Biến tần nguồn dòng .
-Biến tần nguồn áp với nguồn có điều khiển.
-Biến tần nguồn áp với nguồn không điều khiển (sử dụng nghịch lưu áp biến điệu bề rộng xung).
2.2.2.1.Biến tần nguồn dòng :
Biến tần nguồn dòng dùng chỉnh lưu có điều khiển ,nghịch lưu thyristo.
H2.2 Sơ đồ nguyên lý biến tần nguồn dòng
Trên sơ đồ chỉnh lưu có điều khiển cùng với cuộn cảm tạo nên nguồn dòng cung cấp nghịch lưu .Nghịch lưu ở đây là sơ đồ nguồn dòng song song .Hệ thống tụ chuyển mạch được cách ly với tải qua hệ thống điôt cách ly .Dòng ra nghịch lưu có dạng xung chữ nhật ,điện áp ra có dạng tương đối sin nếu phụ tải là động cơ.
Ưu điểm :
+ ưu điểm cơ bản của biến tần loại này là có sơ đồ đơn giản nhất và sử dụng loại thyristo có tần số đóng cắt không cao lắm .
+ Biến tần loại này khi dùng với động cơ không đồng bộ là sơ đồ có khả năng trả năng lượng về nguồn ,khi động cơ chuyển sang chế độ máy phát dòng đầu vào nghịch lưu vẫn được giữ không đổi nhưng chuyển sang chế độ làm việc với góc điều khiển lớn hơn 900 ,nghĩa là chuyển sang làm việc ở chế độ nghịch lưu phụ thuộc,nhờ đó năng lượng từ phía nghịch lưu được đưa về lưới .Biến tần nguồn dòng cũng không sợ chế độ ngắn mạch vì hệ thống giữ dòng không đổi nhờ chỉnh lưu có điều khiển và cuộn kháng trong mạch một chiều .Với công suất nhỏ thì sơ đồ này không phù hợp vì hiệu suất kém và cồng kềnh nhưng với công suất trên 100kW thì đây là một phương án hiệu quả
Nhược điểm :
+Có hệ số công suất nhỏ và phụ thuộc vào tải nhất là khi tải nhỏ.
2.2.2.2.Biến tần nguồn áp :
Với nguồn có điều khiển .
H2.3 sơ đồ nguyên lý biến tần nguồn áp với nguồn có điều khiển .
a)Chỉnh lưu có điều khiển
b)Dùng chỉnh lưu không điều khiển và bộ biến đổi xung áp một chiều.
Biến tần nguồn áp loại này dùng nghịch lưu nguồn áp với đầu vào một chiều điều khiển được .Điện áp một chiều cung cấp có thể dùng chỉnh lưu có điều khiển hoặc không điều khiển sau đó điều chỉnh nhờ bộ biến đổi xung áp một chiều .Với phương án 2 thì hệ số công suất của sơ đồ sẽ không đổi ,không phụ thuộc vào tải .Tuy nhiên khi đó sơ đồ sẽ qua nhiều khâu biến đổi và hiệu suất sẽ kém do đó chỉ phù hợp với tải nhỏ dưới 30kW
Biến tần nguồn áp có dạng điện áp ra xung chữ nhật ,biên độ được điều chỉnh nhờ thay đổi điện áp một chiều .Hình dạng và giá trị điện áp ra không phụ thuộc vào tải ,dòng điện do tải xác định .Điện áp ra có độ méo phi tuyến lớn , có thể không phù hợp với 1 số loại tải .
2.2.2.3.Biến tần nguồn áp biến điệu bề rộng xung :
H2.4 sơ đồ nguyên lý biến tần nguồn áp biến điệu bề rộng xung
Biến tần loại này dùng chỉnh lưu không điều khiển ở đầu vào .Điện áp và tần số ở đầu ra sẽ hoàn toàn do phần nghịch lưu xác định .nghịch lưu thường sử dụng các van điều khiển hoàn toàn như GTO ,IGBT,BJT công suất …
-IGBT và BJT công suất được sử dụng cho biến tần công suất tới 300kW ,điện áo lưới đầu vào đến 690V.Tần số sóng mang thường đến 12 kHz đối với công suất đến 55kW ,với công suất lớn hơn tần số này bị giới hạn dưới 3kHz.
-GTO được sử dụng cho các biến tần công suất trên 300kW ,điện áp lưới đến 690V ,tần số sóng mang 1 kHz.
Tần số đóng cắt cao hơn trong biến điệu bề rộng xung tạo ra điện áp đầu ra gần như sin hoặc chỉ cần những lọc LC đơn giản là có thể tạo ra điện áp hình sin tuyệt đối .
Vì sử dụng chỉnh lưu không điều khiển ở đầu vào nên hệ số công suất của sơ đồ gần như bằng 1( cỡ 0,98) và không phụ thuộc vào phụ tải .Tuy nhiên ở thời điểm đóng điện ban đầu dòng nạp cho tụ một chiều có thể có giá trị rất lớn ,cần phải được hạn chế
2.2.3.Các phương pháp thông dụng điều khiển bộ nghịch lưu áp :
Có nhiều phương pháp để điều chế tạo ra điện áp và tần số mong muốn để điều khiển động cơ .Trong chương này ta khái quát 2 phương pháp thường dùng nhất là:
- Phương pháp điều khiển V/F.
- Phương pháp điều chế độ rộng xung (SinPWM).
2.2.3.1 Phương pháp điều khiển V/F :
2.2.3.1.1 Phương pháp điều khiển E/F :
Ta có công thức sau:
Vớ f: tần số hoạt động của động cơ
fđm: tần số định mức của động cơ
Giả sử động cơ hoạt động dưới tần số định mức (a<1). Từ thông động cơ được giữ
ở giá trị không đổi. Do từ thông của động cơ phụ thuộc vào dòng từ hóa của động
cơ, nên từ thông được giữ không đổi khi dòng từ hóa được giữ không đổi tại mọi
điểm làm việc của động cơ.
Ta có phương trình tính dòng từ hóa tại điểm làm việc định mức như sau:
Với Lm là điện cảm mạch từ hóa
Tại tần số làm việc f:
Từ 2 phương trình trên suy ra điều kiện để dòng điện từ hóa không đổi:
Như vậy từ thông động cơ được giữ không đổi khi tỉ lệ E/f được giữ không đổi (E/f = const).
2.2.3.1.2 Phương pháp V/f :
Tuy nhiên trong thực tế, việc giữ từ thông không đổi đòi hỏi mạch điều khiển rất
phức tạp. Nếu bỏ qua sụt áp trên điện trở và điện kháng tản mạch stator, ta có thể
xem như U ≈ E. Khi đó nguyên tắc điều khiển E/f=const được thay bằng phương
pháp V/f=const.
Trong phương pháp V/f=const (gọi ngắn là V/f), như đã trình bày ở trên thì tỉ số V/f được giữ không đổi và bằng giá trị tỉ số này ở định mức.
Ta có công thức moment định mức ứng với sơ đồ đơn giản của động cơ :
Và moment cực đại ở chế độ định mức :
Khi thay các giá trị định mức bằng giá trị đó nhân với tỉ số a (aωđm, aVđm, aX).Ta có được công thức moment của động cơ ở tần số f khác định mức :
Và moment cực đại ở tần số f khác định mức:
Dựa theo công thức trên ta thấy, các giá trị X1 và X2’ phụ thuộc vào tần số,trong khi R1 lại là hằng số. Như vậy, khi hoạt động ở tần số cao, giá trị (X1+X2’)>>R1/a, sụt áp trên R1 rất nhỏ nên giá trị E suy giảm rất ít dẫn đến từ thông được giữ gần như không đổi. Moment cực đại của động cơ gần như không đổi.
Tuy nhiên, khi hoạt động ở tần số thấp thì giá trị điện trở R1/a sẽ tương đối lớn so với giá trị của (X1+X2’), dẫn đến sụt áp nhiều ở điện trở stator khi moment tải lớn.Điều này làm cho E bị giảm và dẫn đến suy giảm từ thông và moment cực đại.
Để bù lại sự suy giảm từ thông ở tần số thấp. Ta sẽ cung cấp thêm cho động cơ một điện áp Uo để cung cấp cho động cơ từ thông định mức khi f=0. Từ đó ta có quan hệ như sau:
U=Uo+K.f
Với K là một hằng số được chọn sao cho giá trị U cấp cho động cơ bằng Uđm tạif=fđm.
Khi a>1 (f>fđm), Điện áp được giữ không đổi và bằng định mức. Khi đó động cơ hoạt động ở chế độ suy giảm từ thông
Hình 2.5: đồ thị biểu diễn mối quan hệ giữa moment và điện áp theo tần số trong phương pháp điều khiển V/f=const.
2.2.3.2.Phương pháp điều chế độ rộng xung (SinPWM)
Để tạo ra một điện áp xoay chiều bằng phương pháp SINPWM, ta sử dụng một tín hiệu xung tam giác tần số cao đem so sánh với một điện áp sin chuẩn có tần số f. Nếu đem xung điều khiển này cấp cho một bộ biến tần một pha thì đó ngõ ra sẽ thu được một dạng điện áp dạng điều rộng xung có tần số bằng với tần số nguồn sin mẫu và biên độ hài bậc nhất phụ thuộc vào nguồn điện một chiều cung cấp và tỉ số giữa biên độ sóng sin mẫu và sóng mang.Tần số sóng mang phải lớn hơn tần số của sóng sin mẫu. Sau đây là hình vẽ miêu tả nguyên lý của phương pháp điều rộng sin một pha:
H2.6 Nguyên lý của phương pháp điều chế độ rộng xung .
Khi Vcontrol>Vtri thì VAO = Vdc/2.
Khi Vcontrol< Vtri thì VAO = -Vdc/2.
Như vậy, để tạo ra nguồn điện 3 pha dạng điều rộng xung, ta cần có nguồn sin 3 pha mẫu và giãn đồ kích đóng của 3 pha sẽ được biểu diển như hình vẽ dưới đây:
Ta cần tính được biên độ hài bậc nhất của điện áp ngõ ra từ tì số biên độ giữa sóng mang và sóng tam giác. Ta có công thức sau tính biên độ của hài bậc nhất:
Trong đó k là tỉ số giữa biên độ sóng sin mẫu và biên độ sóng mang . còn gọi là tỉ số
điều biên.
.................................................................................................
CHƯƠNG 5: KẾT QUẢ ĐẠT ĐƯỢC
5.1 Mô hình :



5.2 Chạy Thử :
- Tốc độ đặt trước + Chạy/Dừng thông qua FX/RX + Tần số lớn nhất thay đổi điều kiện hoạt động
|
Lệnh hoạt động: Chạy/Dừng thông qua FX/RX
|
Lệnh tần số: Tốc độ đặt trước : [Thấp (20),Trung bình (30), Cao (80)
|
Tần số thay đổi lớn nhất: Từ 60Hz đến 80Hz
|
Đấu nối :


Chú ý:
1. Luôn chắc chắn rằng R, S, T được kết nối tới 3 pha đầu vào AC, và U, V, W được kết nối tới các pha động cơ.
2. Sau khi cấp nguồn, phải đặt tần số trong giới hạn thấp, trung bình, cao.
3. Nếu P1 (FX) bật, động cơ sẽ chạy thuận. Và sau khi tắt, nó sẽ dừng theo đặc tuyến giảm tốc
4. Nếu P2 (RX) bật, động cơ sẽ chạy ngược. Và sau khi tắt, nó sẽ dừng theo đặc tuyến giảm tốc.
Cài đặt thông số
|
Bước |
Lệnh
|
Mã |
Mô tả |
Mặc định |
Sau khi cài đặt |
|
1 |
Thay đổi tần số lớn nhất (FU1)
|
F21
|
Thay đổi tần số lớn nhất |
60H |
80Hz
|
|
2 |
Tần số đặt trước (DRV)
|
st1
|
Đặt tần số ‘Thấp’ |
10H |
20H |
|
3 |
Tần số đặt trước (DRV
|
st2
|
Đặt tần số ‘Trung bình’ |
20Hz
|
30Hz
|
|
4 |
Tần số đặt trước (I/O
|
I30 |
Đặt tần số ‘Cao’ |
30H |
80H |
|
5 |
Chạy thuận (P1: FX
|
I17
|
Mặc định là FX. Giá trị này có thể thay đổi |
FX
|
FX
|
|
6 |
Chạy ngược (P2: RX
|
I18
|
Mặc định là RX. Giá trị này có thể thay đổi |
RX
|
RX
|
5.3 Các quá trình điều khiển dưới dạng tín hiệu vào Analog :
5.3.1 Tín hiệu Analog 0 ~ 10v :
- Biến trở (Núm chỉnh) + Chạy/Dừng qua FX/RX + Thay đổi thời gian tăng/Giảm tốc Điều kiện hoạt động
|
Lệnh chạy Chạy/Dừng qua FX/RX
|
Lệnh tần số 0~60Hz đầu vào analog qua biến trở |
Thời gian Tăng/Giảm tốc Tăng-10s, Giảm-20s
|
Đấu nối :


Chú ý:
- Chắc chắc rằng R, S, T được nối vào 3 pha AC đầu vào và U, V, W cũng được nối tới động cơ.
- Sau khi cấp nguồn, đặt tần số đặt trước trong khoảng thấp, Trung bình, và Cao.
3. Nếu P1 (FX) kích hoạt, động cơ sẽ chạy thuận. Và sau khi mất lệnh chạy nó dừng theo thời gian giảm tốc.
4. Nếu P2 (RX) kích hoạt, động cơ sẽ chạy ngược. Và sau khi mất lệnh chạy nó dừng theo thời gian giảm tốc.
5. Điều khiển tốc độ động cơ qua biến trở.
Cài đặt thông số
|
Bước |
Lệnh |
Mã |
Mô tả |
Mặc định |
Sau khi thay đổi |
|
1 |
Lệnh chạy Nhóm DRV |
Drv
|
Bật/ tắt động cơ qua khối terminal |
1(FX/RX-1) |
1 (FX/RX-1) |
|
2 |
Đầu vào analog Nhóm DRV |
Frq
|
Thay đổi lệnh bàn phím tới lệnh điện áp analog |
0 (Keypad-1 |
3(V1:0~10) |
|
3 |
Accel/Decel time
DRV group |
ACC
dEC
|
Đặt thời gian tăng tốc tới 10s trong ACC Đặt thời gian giảm tốc tới 20s trong dEC |
5s (Accel)
10s (Decel) |
10s (Accel)
20s (Decel) |
|
4 |
Forward run P1: FX) |
I17
|
Mặc định là FX. Thông số này có thể thay đổi
|
FX
|
FX
|
|
5 |
Reverse run P2: RX |
I18
|
Mặc định là RX. Thông số này có thể thay đổi |
RX
|
RX
|
5.3.2 Tín hiệu Analog 0 ~ 20 mA :
- TC Transmitter + Chạy/Dừng qua FX/RX + Thay đổi thời gian tăng/Giảm tốc Điều kiện hoạt động
|
Lệnh chạy Chạy/Dừng qua FX/RX
|
Lệnh tần số 0~60Hz đầu vào analog qua TC Transmitter |
Thời gian Tăng/Giảm tốc Tăng 15s, Giảm 25s
|
Đấu nối :


Chú ý:
1 Chắc rằng R, S, T được nối vào 3 pha AC đầu vào và U, V, W cũng được nối tới động cơ.
2. Sau khi cấp nguồn, đặt tần số đặt trước trong khoảng thấp, Trung bình, và Cao.
3. Nếu P1 (FX) kích hoạt, động cơ sẽ chạy thuận. Và sau khi mất lệnh chạy nó dừng theo thời gian giảm tốc.
4. Nếu P2 (RX) kích hoạt, động cơ sẽ chạy ngược. Và sau khi mất lệnh chạy nó dừng theo thời gian giảm tốc.
5. Điều khiển tốc độ động cơ qua TC Transmitter bằng cách đốt đầu dò nhiệt của TC Transmitter.
Cài đặt thông số
|
Bước |
Lệnh |
Mã |
Mô tả |
Mặc định |
Sau khi thay đổi |
|
1 |
Lệnh chạy Nhóm DRV |
Drv
|
Bật/ tắt động cơ qua khối terminal |
1(FX/RX-1) |
1 (FX/RX-1) |
|
2 |
Đầu vào analog Nhóm DRV |
Frq
|
Thay đổi lệnh bàn phím tới lệnh điện áp analog |
0 (Keypad-1) |
4(i:0~20 mA) |
|
3 |
Accel/Decel time
DRV group |
ACC
dEC
|
Đặt thời gian tăng tốc tới 15s trong ACC Đặt thời gian giảm tốc tới 25s trong dEC |
5s (Accel)
10s (Decel) |
15s (Accel)
25 s (Decel) |
|
4 |
Forward run P1: FX |
I17
|
Mặc định là FX. Thông số này có thể thay đổi
|
FX
|
FX
|
|
5 |
Reverse run P2: RX |
I18
|
Mặc định là RX. Thông số này có thể thay đổi |
RX
|
RX
|
KẾT LUẬN
Qua thời gian thực hiện đề tài, nhóm thực hiện đã học được những bài học thực tiễn bổ ích. Từ đó rút ra một số kết luận
Với sự phát triển vượt bậc của khoa học kĩ thuật đã góp phần làm cho các công nghệ phát triễn mạnh mẽ hơn. Đặc biệt là trong lĩnh vực công nghệ điện và điện tự động.
Điện và tự động hóa là một lĩnh vực quan trọng không thể thiếu của đời sống xã hội, công nghệ tự động ngày nay chứng tỏ được vị thế của mình, tự động hóa máy móc trong sản xuất giúp giảm sức lao động,tiết kiệm năng lượng giảm chi phí sản xuất.
Việc thiết kế thi công mô hình, giúp ích rất nhiều cho việc học tập của nhóm thực hiện đề tài. Thời gian đầu còn bỡ ngỡ dưới sự chỉ dẫn tận tình của thầy đã chỉ dạy nhóm thực hiện đề tài tạo điều kiện làm quen tiếp xúc với đề tài, nhóm thực hiện đề tài đã biết cách vận dụng những kiến thức đã học trong trường của tất cả các bộ môn để thực hiện đồ án.
Nhóm thực hiện đề tài xin chân thành cảm ơn sự chỉ dẫn tận tình của thầy cùng những ý kiến góp ý của bạn học. Vì thời gian thực hiện đề tài không nhiều và khả năng của nhóm thực hiện đề tài có hạn, nên đề tài không tránh những thiếu sót, nhóm thực hiện rất mong sự giúp đỡ, ý kiến đóng góp của quý thầy cô và các bạn để đồ án được hoàn thiện hơn.
ĐỒ ÁN TỐT NGHIỆP ĐIỆN BIẾN TẦN LS - SV004IG5A , thuyết minh THIẾT KẾ VÀ THI CÔNG MÔ HÌNH, BIẾN TẦN LS - SV004IG5A











