THIẾT KẾ VÀ THI CÔNG MÔ HÌNH ĐIỀU KHIỂN ĐỘNG CƠ SERVO AC

NỘI DUNG ĐỒ ÁN
100 MB Bao gồm tất cả file,.lưu đồ giải thuật... thuyết minh, bản vẽ nguyên lý, bản vẽ thiết kế, FILE lập trình, ĐỒ ÁN TỐT NGHIỆP ĐIỆN tử
THIẾT KẾ VÀ THI CÔNG MÔ HÌNH ĐIỀU KHIỂN ĐỘNG CƠ SERVO AC
MỤC LỤC
Chương 1: Giới thiệu Trang 1
1.1 Servo motor là gì........................................................................................................ 1 1.2 Servomotor ................................................................................................................ 9
1.3 Servo Amplifier ....................................................................................................... 18
Chương 2:Sơ đồ kết nối và dây 21
2.1 Kết nối thiết bị ngoại vi............................................................................................... 21
2.1.1 Một pha (100V hoặc 200V) thông số kỹ thuật vi mạch chính ................... 21
2.1.2 Ba pha (200V) thông số kỹ thuật vi mạch chính........................................... 22
2.1.3 Ba pha (400V) Thông số kỹ thuật vi mạch chính.......................................... 24
2.2 Dây mạch chính....................................................................................................... 25
2.2.1 Tên và mô tả của đầu cuối mạch chính .......................................................... 25
2.2.2 Tổn thất Servo Amplifier................................................................................... 26
2.3 Tín hiệu I / O ............................................................................................................ 28
2.3.1 Ví dụ điển hình kết nối tín hiệu I / O ............................................................. 28
2.3.2 Danh sách các đầu cuối CN1 .......................................................................... 30
2.3.3 Tên và chức năng tín hiệu I / O ....................................................................... 32
2.3.4 Giao diện Mạch ................................................................................................. 34
2.4 Dây mã hóa (Chỉ đối với SGMGH và Motors SGMSH)..................................... 38
2.4.1 Kết nối encoder................................................................................................. 38
2.4.2 CN2 các loại giao diện kết nối đầu cuối encoder........................................ 40
Chương 3: Thông số cài đặt và tham số 41
3.1 Cài đặt theo đặc điểm thiết bị ............................................................ 41
3.1.1 Chuyển mạch hướng xoay Servomotor ........................................................ 41
3.1.2 Thiết lập các giới hạn chức năng Overtravel................................................ 42
3.1.3 Hạn chế mo-men xoắn .................................................................................... 46
3.2 Cài đặt theo máy chủ điều khiển .......................................................................... 51
3.2.1 Tham chiếu tốc độ............................................................................................ 51
3.2.2 Tham chiếu vị trí............................................................................................... 54
3.2.3 Sử dụng tín hiệu đầu ra Encoder.................................................................... 60
3.2.4 Chuỗi tín hiệu I / O........................................................................................... 63
3.2.5 Sử dụng chức năng Gear điện tử..................................................................... 64
3.2.6 Kết nối đầu vào điều khiển tốc độ................................................................. 66
3.2.7 Sử dụng điều khiển momen xoắn................................................................... 73
3.2.8- Chức năng cho chuyển tiếp momen xoắn.................................................... 77
3.2.9 Hạn chế bởi Analog tham chiếu điện áp....................................................... 78
3.2.10 Chức năng cho chuyển tiếp tốc độ............................................................... 79
3.2.11 Hạn chế momen xoắn bởi tham chiếu Analog áp...................................... 80
3.2.12 Chức năng giới hạn xung tham chiếu.......................................................... 82
3.3 Thiết lập Servo Amplifier...................................................................................... 83
3.3.1 Tham số.............................................................................................................. 83
3.3.2 Tốc độ chạy........................................................................................................ 84
3.3.3 Cấp phát tín hiệu đầu vào vi mạch.................................................................. 84
3.3.4 Phân bổ đầu ra tín hiệu vi mạch...................................................................... 89
3.3.5 Lựa chọn chế độ kiểm soát .............................................................................. 91
3.4 Thiết lập chức năng dừng........................................................................................ 93
3.4.1 Điều chỉnh Offset ............................................................................................. 93
3.4.2 Lựa chọn chế độ dừng....................................................................................... 93
3.4.3 Sử dụng chức năng Zero Clamp....................................................................... 95
3.5 Tổn thất..................................................................................................................... 97
3.5.1 Tổn thất do điện trở cuộn dây servomotor ................................................... 97
3.5.2 Năng lượng tiêu tốn của Servo Amplifier.................................................... 101
3.6 Encoder tuyệt đối ................................................................................................. 103
3.6.1 Giao diện mạch................................................................................................ 103
3.6.2 Cấu hình một Encoder tuyệt đối .................................................................. 104
3.6.3 Cài đặt Encoder tuyệt đối............................................................................... 105
3.7 Hệ thống bảo vệ..................................................................................................... 107
3.7.1 MCCB hoặc cầu chì theo công suất điện.................................................... 107
3.7.2 JUSP-TA50P Sơ đồ phần cuối số chân và tên tín hiệu............................. 109
3.8 Tham số đảo chiều................................................................................................. 111
Chương 4: Ứng dụng servomotor 112
4.1 Làm phim............................................................................................................... 113
4.2 Máy hàn................................................................................................................. 114
4.3 Băng tải.................................................................................................................. 116
4.4 Máy khoan............................................................................................................. 117
4.5 Máy dán nhãn........................................................................................................ 119
Chương 5: Thi công 121
5.1 Sơ đồ kết nối dây mạch động lực...................................................................... 123
5.2 Sơ đồ mạch điều khiển ....................................................................................... 124
5.3 PLC Mitshubishi FX1X....................................................................................... 124
Kết luận......................................................................................................................... 127
Phụ lục........................................................................................................................... 128
Tài liệu tham khảo....................................................................................................... 143
LỜI NÓI ĐẦU
Thế giới ngày nay đã chuyển dần từ thời đại công nghiệp sang thời đại công nghệ, trong đó thành công thuộc về các lực lượng nắm giữ công nghệ .Hòa cùng với xu hướng của sự phát triển khoa học và công nghệ, ngành điện và các thiết bị điện - điện tử được ứng dụng ngày càng rộng rải và mang lại hiệu quả cao trong hầu hết các lĩnh vực kinh tế, kỹ thuật cũng như trong đời sống xã hội. Vì thế việc ứng dụng và tiếp thu công nghệ mới là hết sức quan trọng.
Vấn đề tự động hóa trong công nghiệp để giảm bớt lao động chân tay và nâng cao năng suất lao động, là một trong những đề tài được các bạn sinh viên, các thầy cô ở những trường kỹ thuật quan tâm và nghiên cứu nhiều nhất.
Chính vì vậy là những sinh viên ngành điện công nghiệp nhìn nhận được xu hướng trên chúng em đã cùng trong quá trình học tập ở ghế nhà trường đồng thời nghiên cứu các công nghệ mới về các vấn đề liên quan với chuyên ngành. Sau thời gian học tập nghiên cứu và được sự định hướng của thầy cô ở Trường Cao Đẳng Kỹ Thuật Cao Thắng chúng em đã đi đến tìm hiểu THIẾT KẾ VÀ THI CÔNG MÔ HÌNH ĐIỀU KHIỂN ĐỘNG CƠ SERVO AC và chọn làm đề tài đồ án tốt nghiệp.
Nội dung tập thuyết minh này gồm 4 chương:
- Chương 1 : GIỚI THIỆU
- Chương 2 : KẾT NỐI VÀ DÂY
- Chương 3 : THÔNG SỐ CÀI ĐẶT VÀ THAM SỐ
- Chương 4 : ỨNG DỤNG CỦA SERVOMOTOR
Dù rất cố gắng khi thực hiện đề tài này, nhưng chắc chắn không tránh khỏi những thiếu sót, rất mong đón nhận được sự đóng góp ý kiến từ quí thầy cô và các bạn. Nhóm thực hiện đồ án chân thành cảm ơn.
Chương 1: GIỚI THIỆU
1.1 Hệ thống servo là gì?
Nó là một hệ thống để kiểm soát dụng cụ cơ khí phù hợp với biến đổi vị trí hoặc tốc độ mục tiêu giá trị.
Cơ cấu định vị:
Hệ thống servo không đơn giản chỉ là một phương pháp thay thế điều khiển vị trí và tốc độ của các cơ cấu cơ học, ngoài những thiết bị cơ khí đơn giản, hệ thống servo bây giờ đã trở thành một hệ thống điều khiển chính trong phương pháp điều khiển vị trí và tốc độ. Sau đây là một số ví dụ về các cơ cấu định vị:
Cơ cấu định vị đơn giản :
Các vị dụ về cơ cấu này đó là xy lanh hay trục cam hay bộ ly hợp và phanh hã
Ưu điểm của cơ cấu này đó là đơn giản, rẻ tiền, và có thể hoạt động ở tốc độ cao.
Cơ cấu định vị linh hoạt điều khiển bởi servo motor
Cơ cấu này có thể được điều khiển vòng hở, nửa kín hay vòng kín
Ưu điểm của cơ cấu này đó là độ chính xác và đáp ứng tốc độ cao, có thể dễ dàng thay đổi vị trí đich và tốc độ của cơ cấu chấp hành.
Cơ cấu chuyển động định hướng
Cơ cấu này chuyển động theo hướng nhất định được chỉ định từ bộ điều khiển. Chuyển động có thể là chuyển động tịnh tiến hay quay.
Ưu điểm là cơ cấu chấp hành đơn giản và nâng cao tuổi thọ hộp số truyền động (do truyền động khá êm).
Backlash và hiệu chỉnh:
Backlash hiểu nôm na đó là giới hạn chuyển động của một hệ thống servo.Tất cả các thiết bị cơ khí đều có một điểm trung tính giữa chuyển động hoặc quay theo chiều dương và âm (cũng giống như động cơ trước khi đảo chiều thì vận tốc phải giảm về 0). Xét một chuyển động tịnh tiến lui và tới như trong hình sau:
Chuyển động tính tiến này được điều khiển bởi một động cơ servo. Chuyển động tới và lui được giới hạn bởi một khoản trống như trong hình. Như vậy động cơ sẽ quay theo chiều dương hoặc chiều âm theo một số vòng nhất định để chuyển động của thanh quét lên toàn bộ khoản trống đó nhưng không được vượt quá khoản trống (đây là một trong những điều kiện cốt lõi của việc điều khiển động cơ servo). Giới hạn này được gọi là backlash. Tuy nhiên trong thực tế độ động cơ quay những vòng chính xác để con trượt trựơt chính xác và quét lên toàn bộ khoản trống trên là rất khó thực hiện nếu không có một sự bù trừ cho nó. Và trong hệ thống servo nhất thiết có những hàm lệnh thực hiện việc bù trừ, hiệu chỉnh này. Như trong hình vẽ trên, hệ thống servo gởi xung lệnh hiệu chỉnh cộng/trừ số lượng xung lệnh điều khiển và các xung lệnh hiệu chỉnh này sẽ không được tính đến trong bộ đếm xung.
Hệ thống điều khiển
Có ba dạng :
Điều khiển vòng hở:
Nghĩa là bộ điều khiển vị trí chỉ đặt lệnh cho động cơ quay mà thôi.
Điều khiển nửa kín:
Ở đây số vòng quay của step motor được mã hóa và hồi tiếp về bộ điều khiển vị trí. Nghĩa là đến đây thì động cơ step chỉ quay một số vòng nhất định tùy thuộc vào “ lệnh” của bộ điều khiển vị trí, nói cách khác bộ điều khiển vị trí có thể ra lệnh cho chạy hoặc dừng động cơ theo một lập trình sẵn có tùy thuộc vào ý đồ của người thiết kế.
Điều khiển vòng kín
Vòng hồi tiếp lúc này không phải hồi tiếp từ trục động cơ về mà vòng hồi tiếp lúc này là hồi tiếp vị trí của bàn chạy thong qua một thướt tuyến tính. Lúc này bộ điều khiển vị trí không điều khiển số vòng quay của motor nữa mà nó điều khiển trực tiếp vị trí của bàn chạy. Nghĩa là các sai số tĩnh do sai khác trong các bánh răng hay hệ thống truyền động được loại bỏ.
Cấu hình của hệ thống servo:
Động cơ servo
Sự khác biệt của động cơ servo so với những động cơ sử dụng cảm ứng từ nói chung là nó có một máy dò để phát hiện tốc độ quay và vị trí.
Bộ điều khiển (Tính hiệu đầu vào)
Điều khiển tốc độ đông cơ servo quay với một tốc độ tương ứng với tính hiệu điện áp đầu vào. VÌ vậy nó giám sát tốc độ quay của đông cơ trong mọi thời điểm.
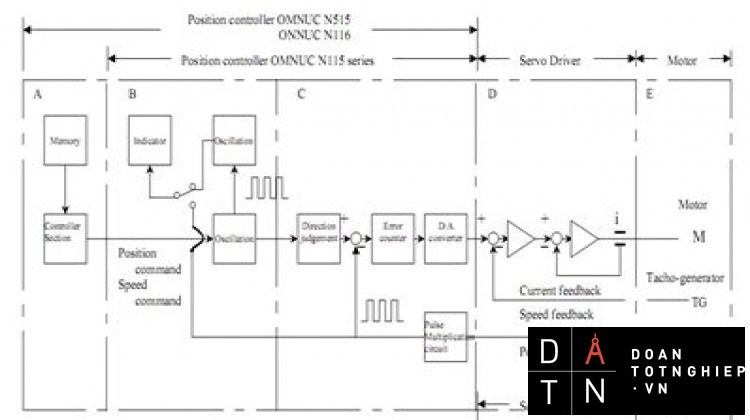
Sơ đồ khối điều khiển động cơ servo với 2 vòng hồi tiếp vị trí và tốc độ:
Trong đó phần A B C là phần so sánh xử lý tín hiệu hồi tiếp và hiệu chỉnh lệnh. Phần D E là cơ cấu thực thi và hồi tiếp. Các phần A B C thì khá phổ dụng trong các sơ đồ khối điều khiển, phần D E thì tùy các thiết bị sử dụng mà chúng có khác nhau đôi chút nhưng về bản chất chúng hoàn toàn giống nhau. Sau đây là một số ví dụ về phần D E thường gặp.
1.2.servomotor
Hình thức bên ngoài và tên .
Số lượng ngõ ra
Loại servomotor
Số series
Ngày sản xuất
Số lượng tốc độ motor
Mẫu số
Tiêu chuẩn servomotor
Tên Servomotor Sigma II Series Thông số kỹ thuật phanh
SGMAH 1:tiêu chuẩn
SGMPH C:phanh với nguồn 24VDC
SGMGH E:S+C
SGMBH SGMPH:xem catalog cài đặt
Công suất servomotor Thông số kỹ thuật trục quay
Nguồn cung cấp Thay đổi thiết kế
A:200V A SGMAH
B:100V SGMPH
D:400V SGMGH(1500rmp)
SGMBH
Thông số series của encoder E SGMPH
SGMBH A=200%
B=250%
Công suất của sevomotor
Encoder series
|
Mã số |
Thông số kỹ thuật |
SGMAH |
SGMPH |
SGMGH |
SGMUH |
SGBMH |
|
1 |
16-bit mã hóa tuyệt đối |
Tiêu chuẩn |
Tiêu chuẩn |
- |
- |
- |
|
1 |
17-bit mã hóa tuyệt đối |
- |
- |
Tiêu chuẩn |
Tiêu chuẩn |
Tiêu chuẩn |
|
A |
13-bit mã hóa gia tăng |
Tiêu chuẩn |
Tiêu chuẩn |
- |
- |
- |
|
B |
16-bit mã hóa gia tăng |
Tùy chọn |
Tùy chọn |
- |
- |
- |
|
C |
17-bit mã hóa gia tăng |
- |
- |
Tiêu chuẩn |
Tiêu chuẩn |
Tiêu chuẩn |
Sự khác biệt so với motor thường:
Về kết cấu và hoạt đông của động cơ servo về cơ bản giống động cơ thường. Nhưng nó được thiết kế để đáp ứng độ chính xác cao, tốc độ cao, tần số cao kiểm soát tốc độ và vị trí của các phương tiên cơ khí.
Không phải bất kì động cơ nào cũng có thể dùng làm động cơ servo. Động cơ servo là động cơ hoạt động dựa theo các lệnh điều khiển vị trí và tốc độ. Chính vì thế nó phải được thiết kế sao cho các đáp ứng là phù hợp với nhu cầu điều khiển. Về cơ bản thì một servo motor và một động cơ bình thường giống nhau về mặc cấu tạo và nguyên lý hoạt động ( cũng có phần cảm phần ứng, khe hở từ thông, cách đấu dây … ). Tuy nhiên tuỳ theo nhu cầu điều khiển mà nó có một số điểm cải tiến hơn (dành cho những mục đích đặc biệt) so với động cơ thường. Sau đây là một vài ví dụ về nét đặt trưng của động cơ servo:
1.Tăng tốc độ đáp ứng tốc độ:
Các động cơ bình thường, muốn chuyển từ tốc độ này sang tốc độ khác thì cần có một khoảng thời gian quá độ. Trong một số nhu cầu điều khiển, đòi hỏi động cơ phải tăng/giảm tốc nhanh chóng để đạt được một tốc độ mong muốn trong thời gian ngắn nhất, hoặt đạt được một vị trí mong muốn nhanh nhất. Ví dụ muốn điều khiển một cơ cấu từ vị trí X đến vị trí X’, ban đầu khi ở xa vị trí X’ thì động cơ quay với vận tốc lớn để tăng tốc, tuy nhiên khi đến gần X’ đòi hỏi động cơ cần giảm tốc tức thì để có thể đạt được vị trí mong muốn một cách chính xác và loại trừ sự vọt lố vị trí. Các động cơ thường không thể đáp ứng được điều này. Để động cơ đáp ứng được những yêu cầu trên thì nó phải được thiết kế sao cho rút ngắn đáp ứng tốc độ của động cơ.
Muốn như vậy ta cần giảm moment quán tính và tăng dòng giới hạn cho động cơ. Để giảm moment quán tính thì động cơ servo được giảm đường kính rotor và loại bỏ các cơ cấu sắt không cần thiết. Để tăng dòng giới hạn, động cơ servo có thể sử dụng sắt Ferrit để làm mạch từ và thiết kế hình dạng lõi sắt cho phù hợp. Đối với động cơ nam châm vĩnh cữu thì nó cần được thiết kế sao cho ngăn cản được sự khử từ (hình dạng mạch từ) và tăng khả năng từ tính của nam châm (sử dụng nam châm đất hiếm rare earth magnet).
2.Tăng khả năng đáp ứng:
Đáp ứng ở đây cần được hiểu đó là sự tăng/giảm tốc cần phải “mềm” nghĩa là gia tốc là một hằng số hay gần như là một hằng số.
Một số động cơ như thang máy hay trong một số băng chuyền đòi hỏi đáp ứng tốc độ của cơ cấu phải “mềm”, tức là quá trình quá độ vận tốc phải xảy ra một cách tuyến tính. Để làm được điều này thì cuộn dây trong động cơ phải có điện cảm nhỏ nhằm loại bỏ khả năng chống lại sự biến đổi dòng điện do mạch điều khiển yêu cầu. Các động cơ servo thuộc loại này thường được thiết kế giảm thiểu số cuộn dây trong mạch và có khả năng thu hẹp các vòng từ trong mạch từ khe hở không khí.
3.Mở rộng vùng điều khiển (control range):
Một số yêu cầu trong điều khiển cần điều khiển động cơ ở một dải tốc độ lớn hơn định mức rất nhiều. Động cơ bình thường chỉ cho phép điện áp đặt lên nó phải bằng điện áp chịu đựng của động cơ và thông thường không quá lớn so với điện áp định mức.
Động cơ servo thuộc loại này có thiết kế đặt biệt nhằm gia tăng điện áp chịu đựng hoặc tăng khả năng bão hoà mạch từ trong động cơ .Như vậy động cơ servo thuộc loại này phải được tăng cường cách điện và sử dụng sắt Ferrit hoặc nam châm đất hiếm (rare earth).
4. Khả năng ổn định tốc độ:
Động cơ servo loại này thường được thiết kế sao cho vận tốc quay của nó rất ổn định.
Như các ta biết là không có mạch điện hoàn hảo, không có từ trường hoàn hảo trong thực tế. Chính vì thế một động cơ quay 1750 rpm không có nghĩa là nó luôn luôn quay ở 1750 rmp mà nó chỉ dao động quanh giá trị này. Động cơ servo khác biệt với động cơ thường là ở chỗ độ ổn định tốc độ khác cao. Các động cơ servo loại này thường được sử dụng trong các ứng dụng đòi hỏi tốc độ chính xác (như robot). Nó được thiết kế sao cho có thể gia tăng được dòng từ trong mạch từ lên khá cao và gia tăng từ tính của cực từ. Các rãnh rotor được thiết kế với hình dáng đặc biệt và các cuộn dây rotor cũng được bố trí khác đặc biệt để có thể đáp ứng được yêu cầu này.
Tăng khả năng chịu đựng của động cơ:
Một số động cơ servo được thiết kế sao cho có thể chịu đựng được các tín hiệu điều khiển ở tần số rất cao và có khả năng chịu được được những yêu cầu tăng tốc bất ngờ từ bộ điều khiển. Những động cơ như thế này thường được cải tiến về phần cơ để có tuổi thọ cao và có thể chống lại được sự hao mòn do ma sát trên ổ bi bạc đạn cũng như trên chổi than (đôi với DC)
Các loại và tính năng của Servo Motors:
Động cơ Servo được phân loại thành các động cơ servo DC, động cơ servo AC, và động cơ bước.
Có hai loại động cơ servo AC , động cơ servo đồng bộ và động servo loại cảm ứng.
Phân loại động cơ servo:
Nét đặc trưng của mỗi động cơ servo:
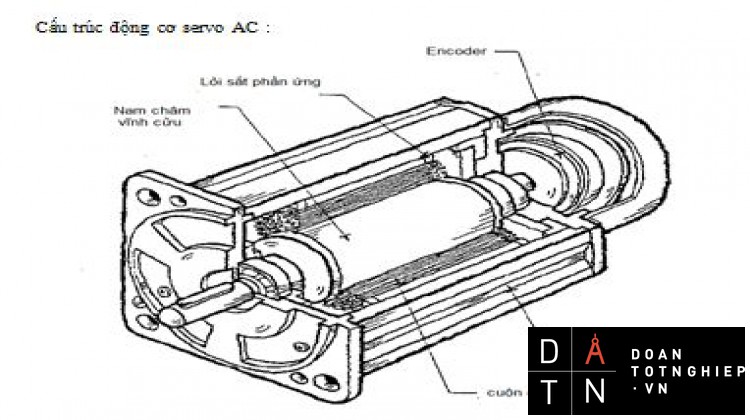
Cấu trúc động cơ servo AC :
Các tính năng của động cơ servo AC so với động cơ servo DC:
- Nam châm vĩnh cửu được gắn sẳn trên roto .... từ trường quay.
- Cuộn dây được cung cấp trên các Stator ... ... ... ... tĩnh phần ứng.
- Mặt khác, các chức năng điện của Stator một rotor được đảo ngược, động cơ AC servo không có các chuyển mạch và chuổi than mà động cơ DC servo có.
Nguyên tắc hoạt động của đông cơ servo AC:
Như hình trên thì động cơ có ba cuộn dây với một đầu chung cho tất cả các cuộn dây. Thông thường đầu chung được đấu với nguồn dương nguồn và được kích từ theo thứ tự liên tục.
Theo hình thì đây là động cơ có góc quay 120 độ cho mỗi bước. Rotor trong động cơ có 2 răng. Stator có ba cực cách nhau 120 độ. Khi cuộn một kích điện thì răng của rotor bị hút vào cực một.Nếu dòng qua cuộn một bị ngắt và đóng dòng cho cuộn hai , rotor quay 120 độ ngược kim đông hồ và răng của rotor sẽ hút vào cực hai.
Để quay động cơ này một cách liên tục, chúng ta cần cấp điện liên tục luân phiên cho ba cuộn dây. Bảng dưới đây thể hiển rõ quá trình hoạt động của động cơ servo.
Các đặc điểm của động cơ servo:
1.3 Servo Amplifiers
Hình thức bên ngoài
Loại servo Amplifier
Số series Áp dụng công suất
Áp dụng nguồn cung cấp
Mẫu số
Sigma II Series
SGDH Servo Amplifier
Công suất tối đa áp dụng Servomotor
Điện áp cung cấp
A:200V
B:100V
D:400V
Loại
E:đối với momen xoắn,tốc độ và kiểm soát vị trí
Cài đặt
R: Rack mounted
S: một pha
P: ống-thông gió (chỉ 6 đến 15kW)
Công suất tối đa áp dụng Servomotor
|
Công suất tối đa áp dụng Servomotor |
|||
|
Ký hiệu |
Công suất (KW) |
Ký hiệu |
Công suất(KW) |
|
A3 |
0.03 |
50 |
5.0 |
|
A5 |
0.05 |
60 |
6.0 |
|
01 |
0.10 |
75 |
7.5 |
|
02 |
0.20 |
1A |
11.0 |
|
04 |
0.40 |
1E |
15.0 |
|
05 |
0.50 |
2B |
20.0 |
|
08 |
0.75 |
3Z |
30.0 |
|
10 |
1.0 |
3G |
37.0 |
|
15 |
1.5 |
4E |
45.0 |
|
20 |
2.0 |
5E |
55.0 |
|
30 |
3.0 |
|
|
Chương 2: SƠ ĐỒ KẾT NỐI VÀ DÂY
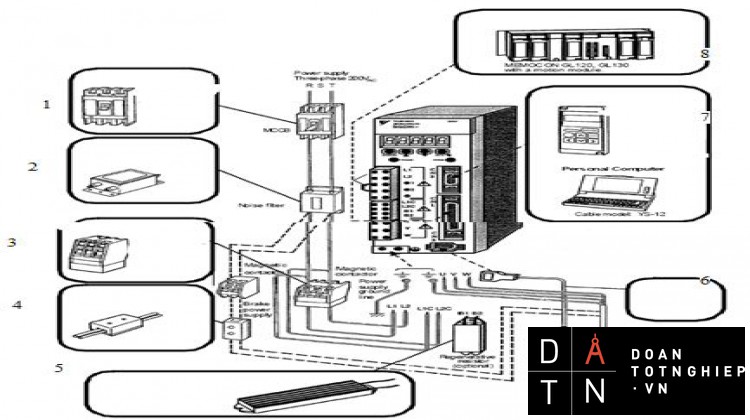
2.1 Kết nối đến thiết bị ngoại vi
Phần này cung cấp các ví dụ về tiêu chuẩn sản phẩm Sigma II Series kết nối thiết bị ngoại vi.
2.1.1 Một pha (100V hoặc 200V) thông số kỹ thuật vi mạch chính:
.............................................................................
Thông số kỹ thuật của Servo pack.
Yakawa SGDH-01BE,100V,100W.
Thông số kỹ thuật của Servo AC.
SGMPH -01BB 100V,100W.
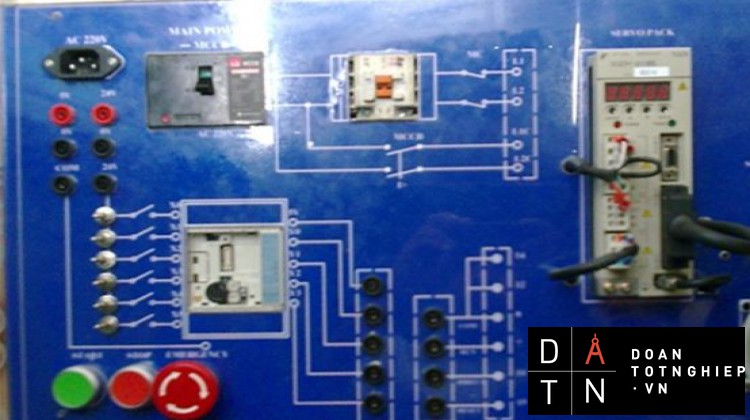
5.1 Sơ đồ kết nối dây mạch động lực.
5.2 Sơ đồ mạch điều khiển
5.3 PLC MITSHUBISHI FX1S
Ký hiệu ngõ vào và ngõ ra:
Sơ đồ cung cấp nguồn cung cấp.
Thông số kỹ thuật đầu vào 24VDC
|
|
FX1N đơn vị chính, |
FX0N, FX2N khối mở rộng |
||
|
X0 → x7 |
X10 → ∞ |
|||
|
Điện áp đầu vào |
24V DC ± 10% |
|||
|
Dòng diện đầu vào |
24V DC, 7mA |
24V DC, 5mA |
24V DC, 5mA |
|
|
Chuyển đổi đầu vào |
OFF→ON |
> 4.5mA |
> 3.5mA |
> 3.5mA |
|
ON→OFF |
<1.5A |
|||
|
Thời gian đáp ứng |
10ms |
|||
|
Thay đổi thời gian đáp ứng |
X000-X007 0-15ms |
- |
||
|
Vi mạch độc lập |
Photocoupler |
|||
|
Hiển thị hoạt động |
LED sáng |
|||
KẾT LUẬN:
Qua quá trình thực hiện đồ án nhóm đã tìm hiểu thêm được nhiều kiến thức trong quá trình nghiên cứu đề tài ,hiểu thêm về mô hình và điều khiển động cơ SERVO AC . Nhóm cảm thấy đây là một đề tài hay và thật sự là công nghệ mới cần phải tiếp thu để phục vụ cho mình sau khi ra trường. Quá trình thực hiện đề tài cũng rèn luyện cho từng thành viên trong nhóm khả năng hoạt động nhóm làm việc tập thể phương pháp và kỹ năng học tập. Đồng thời đây cũng là cơ hội cho từng thành viên của nhóm thể hiện kiến thức học tập sau khóa học tại trường.
Trong quá trình thực hiện đề tài dù đã rất cố gắng nhưng nhóm không tránh khỏi những
Thiếu sót rất mong được thầy cô và các bạn góp ý kiến thêm để đề tài được hoàn chỉnh.
Phụ lục
- Tham số
|
Thể loại |
Số tham số |
Tên |
Đơn vị |
Thiết lập range |
Thiết lâp mặc định |
|
Chức năng lựa chọn tham số |
Pn000* |
Chức năng lựa chọn công tắc cơ bản |
- |
- |
0000 |
|
Pn001* |
Chức năng lựa chọn Công tắc ứng dụng 1 ** |
- |
- |
0000 |
|
|
Pn002* |
Chức năng lựa chọn Công tắc ứng dụng |
- |
- |
0000 |
|
|
Pn003
|
Chức năng lựa chọn Công tắc ứng dụng 3 |
- |
- |
0002 |
|
|
Tham số tăng
|
Pn100 |
Tăng tốc độ vòng |
Hz |
1 to 2000 |
40 |
|
Pn101 |
Tich phân tốc độ vòng,hằng số thời gian |
0.01ms |
15 to 51200 |
2000 |
|
|
Pn102 |
Tăng vị trí vòng |
s-1 |
1 to 2000 |
40 |
|
|
Pn103 |
Tỷ lệ quán tính |
% |
0 to 10000 |
0 |
|
|
Pn104 |
Tốc độ tăng 2nd vòng |
Hz |
1 to 2000 |
40 |
|
|
Pn105 |
Tích phân tốc độ 2nd vòng,hằng số thời gian |
0.01ms |
15 to 51200 |
2000 |
|
|
Pn106 |
Tăng vị trí vòng 2nd |
s-1 |
1 to 2000 |
40 |
|
|
Pn107 |
Bias |
rpm |
0 to 450 |
0 |
|
|
Pn108 |
Bias Width Addition |
ref. units |
0 to 250 |
7 |
|
|
Pn109 |
Feed-Forward |
% |
0 to 100 |
0 |
|
|
Pn10A |
Feed-Forward thời gian |
0.01ms |
0 to 6400 |
0 |
|
|
Pn10B* |
Chuyển sang chế độ tham chiếu momen xoắn. |
- |
- |
0000 |
|
|
Pn10C |
Chuyển sang chế độ tham chiếu tốc độ |
% |
0 to 800 |
200 |
|
|
Pn10D |
Chuyển sang chế độ tăng tốc |
rpm |
0 to 10000 |
0 |
|
|
Pn10E |
Chuyển sang chế độ xung lỗi |
10rpm / s |
0 to 3000 |
0 |
|
|
Pn11F |
Online Autotuning Switches |
ref. units |
0 to 10000 |
0 |
|
|
Pn110* |
Thông tin phản hồi bù tốc độ *** |
- |
- |
0010 |
|
|
Pn111 |
Tham số quay ngược (Không thay đổi.) |
% |
1 to 500 |
100 |
|
|
Pn112 |
|
% |
0 to 1000 |
100 |
|
|
Pn113 |
|
- |
0 to 10000 |
1000 |
|
|
Pn114 |
|
- |
0 to 400 |
200 |
|
|
Pn115 |
|
- |
0 to 1000 |
32 |
|
|
Pn116 |
|
- |
0 to 1000 |
16 |
|
|
Pn117 |
|
% |
20 to 100 |
100 |
* Sau khi thay đổi tham số này, chu kỳ mạch chính và nguồn cung cấp năng lượng kiểm soát để cho phép các mới cài đặt.
** Hạn nhiều lần lượt là hợp lệ khi có tham số Pn002.2 Encoder tuyệt đối sử dụng được thiết lập đến "2". Các giá trị sẽ được xử lý trong phạm vi của "32.767--32.768" cho các cài đặt khác ngay cả khi giá trị được thay đổi.
Không có cần phải thay đổi giới hạn nhiều lần lượt trừ trường hợp đặc biệt. Hãy cẩn thận không để thay đổi thiết lập, trừ khi cần thiết.
*** Các thiết lập của tham số Pn111 là hợp lệ khi có tham số Pn110.1 được thiết lập để 0.
|
Thể loại |
Số tham số |
Tên |
Đơn vị |
Thiết lập range |
Thiết lập mặc định |
|
Tham số tăng |
Pn118 |
Tham số quay ngược (Không thay đổi.) |
% |
20 to 100 |
100 |
|
Pn119 |
s-1 |
1 to 2000 |
50 |
||
|
Pn11A |
0.1% |
1 to 2000 |
1000 |
||
|
Pn11B |
Hz |
1 to 150 |
50 |
||
|
Pn11C |
Hz |
1 to 150 |
70 |
||
|
Pn11D |
% |
1 to 150 |
100 |
||
|
Pn11E |
% |
1 to 150 |
100 |
||
|
Pn11F |
ms |
1 to 2000 |
0 |
||
|
Pn120 |
0.01ms |
1 to 51200 |
0 |
||
|
Pn121 |
Hz |
10 to 250 |
50 |
||
|
Pn122 |
Hz |
0 to 250 |
0 |
||
|
Pn123 |
% |
0 to100 |
0 |
||
|
Tham số vị trí |
Pn200 * |
Công tắc lựa chọn tham chiếu kiểm soát vị trí |
- |
- |
0000 |
|
Pn201 * |
PG Divider |
p / r |
16 to 16384 |
16384 |
|
|
Pn202 * |
Electronic Gear Ratio (Numerator) |
- |
1 to 65535 |
4 |
|
|
Pn203 * |
Electronic Gear Ratio (Denominator) |
- |
1 to 65535 |
1 |
|
|
Pn204 |
Thông số tham chiếu vị trí Accel / Decel |
0.01ms |
0 to 6400 |
0 |
|
|
Pn205 * |
Thiết lập giới hạn Multi-Turn ** |
rev |
0 to 65535 |
65535 |
|
|
Pn206 * |
Tham số quay ngược (Không thay đổi.) |
P/rev |
513 to 65535 |
16384 |
|
|
Pn207 * |
Công tắc chức năng kiểm soát vị trí * |
- |
- |
0000 |
|
|
Pn208 * |
Thời gian trung bình tham chiếu momen vị trí. |
0.01ms |
6 to 6400 |
0 |
|
|
Tham số tốc độ |
Pn300 |
Tham chiếu ngõ vào tốc độ tăng |
0.01V / |
150 to 3000 |
600 |
|
Pn301 |
Tốc độ 1 |
rpm |
0 to 10000 |
100 |
|
|
Pn302 |
Tốc độ 2 |
rpm |
0 to 10000 |
200 |
|
|
Pn303 |
Tốc độ 3 |
rpm |
0 to 10000 |
300 |
|
|
Pn304 |
Tốc độ chạy |
rpm |
0 to 10000 |
500 |
|
|
Pn305 |
Thời gian khởi động bắt đầu tăng tốc |
ms |
0 to 10000 |
0 |
|
|
Pn306 |
Thời gian khởi động bắt đầu giảm tốc |
ms |
0 to 10000 |
0 |
|
|
Pn307 |
Lựa chọn hằng số thời gian tham chiếu tốc độ |
0.01ms |
0 to 65535 |
40 |
|
|
Pn308 |
Lựa chọn hằng số thời gian tốc độ phản hồi |
0.01ms |
0 to 65535 |
0 |
Sau khi thay đổi các tham số này, chu kỳ mạch chính và kiểm soát nguồn cung cấp năng lượng để cho phép các cài đặt mới
** Hạn chế nhiều lần lượt là hợp lệ khi có tham số Pn002.2 Encoder tuyệt đối sử dụng được thiết lập đến "2". Các giá trị sẽ được xử lý trong phạm vi của "32.767--32.768" cho các cài đặt khác ngay cả khi giá trị được thay đổi.
Không cần phải thay đổi giới hạn nhiều lần lượt trừ trường hợp đặc biệt. Hãy cẩn thận không để thay đổi thiết lập, trừ khi cần thiết.
|
Thể loại |
Số tham số |
Tên |
Đơn vị |
Thiết lập range |
Thiết lập mặc định |
|
Tham số momen xoắn |
Pn400 |
Tham chiếu Mô-men xoắn đầu vào tăng |
0.1V/rated torque |
10 to 100 |
30 |
|
Pn401 |
Lựa chọn hằng số thời gian tham chiếu Mô-men xoắn |
0.01ms |
0 to 65535 |
100 |
|
|
Pn402 |
Giới hạn momen xoắn thuận |
% |
0 to 800 |
800 |
|
|
Pn403 |
Giới hạn momen xoắn ngược |
% |
0 to 800 |
800 |
|
|
Pn404 |
Giới hạn momen xoắn thuận ngoài |
% |
0 to 800 |
100 |
|
|
Pn405 |
Giới hạn momen xoắn ngược ngoài |
% |
0 to 800 |
100 |
|
|
Pn406 |
Dừng khẩn cấp momen xoắn |
% |
0 to 800 |
800 |
|
|
Pn407 |
Điều khiển hạn chế tốc độ momen xoắn nội. |
rpm |
0 to 10000 |
10000 |
|
|
Pn408 |
Công tắc chức năng mô-men xoắn |
- |
- |
0000 |
|
|
Pn409 |
Mức lọc tần số |
Hz |
50 to 2000 |
2000 |
|
|
Tham số thứ tự |
Pn500 |
Định vị khổ đã hoàn thành |
ref. units |
0 to 250 |
7 |
|
Pn501 |
Cấp Zero Clamp |
rpm |
0 to 10000 |
10 |
|
|
Pn502 |
Cấp phát hiện chuyển động |
rpm |
1 to 10000 |
20 |
|
|
Pn503 |
Chiều rộng tín hiệu tốc độ đầu ra trùng hợp ngẫu nhiên |
rpm |
0 to 100 |
7 |
|
|
Pn504 |
Chiều rộng tín hiệu NEAR |
ref. units |
1 to 250 |
1024 |
|
|
Pn505 |
Cấp tràn |
256 ref. units |
1 to 32767 |
0 |
|
|
Pn506 |
Thời gian Delay tham chiếu phanh Servo OFF |
10ms |
0 to 50 |
100 |
|
|
Pn507 |
Cấp phanh tham chiếu tốc độ đầu ra |
rpm |
0 to 10000 |
50 |
|
|
Tham số thứ tự |
Pn508 |
Thời gian cho ra tham chiếu phanh |
10ms |
10 to 100 |
20 |
|
Pn509 |
Thời gian giữ tạm thời |
ms |
20 to 1000 |
2100 |
|
|
Pn50A * |
Lựa chọn tín hiệu đầu vào 1 |
- |
- |
6543 |
|
|
Pn50B* |
Lựa chọn tín hiệu đầu vào 2 |
- |
- |
8888 |
|
|
Pn50C * |
Lựa chọn tín hiệu đầu vào 3 |
- |
- |
8888 |
|
|
Pn50D * |
Lựa chọn tín hiệu đầu vào 4 |
- |
- |
3211 |
|
|
Pn50E * |
Lựa chọn tín hiệu đầu ra 1 |
- |
- |
0000 |
|
|
Pn50F * |
Lựa chọn tín hiệu đầu ra 2 |
- |
- |
0000 |
|
|
Pn510 * |
Lựa chọn tín hiệu đầu ra 3 |
- |
- |
8888 |
|
|
Pn511 * |
Tham số ngược (Không thay đổi). |
- |
- |
8888 |
|
|
Pn512 * |
Cài đặt tín hiệu đầu ra ngược |
- |
- |
0000 |
|
|
Tham số khác |
Pn600 |
Năng lực điện trở tái tạo ** |
10W |
0 đến |
0 |
|
Pn601 |
Tham số ngược (Không thay đổi). |
- |
0 đến |
0 |
* Sau khi thay đổi các tham số này, chu kỳ mạch chính và kiểm soát nguồn cung cấp năng lượng để cho phép các cài đặt mới.
** Thông thường thiết lập đến "0". Khi sử dụng một điện trở bên ngoài tái tạo, thiết lập công suất (W) của điện trở tái sinh.
*** Các giới hạn trên là Công suất tối đa (W) của bộ khuếch đại servo.
2.Lựa chọn tín hiệu đầu vào
|
Thông số |
Số thứ tự |
Tên |
Cài đặt |
Mô tả |
Thiết lập mặc định |
|
Pn50A
|
0 |
Chế độ phân bổ tín hiệu đầu vào |
0 |
Thiết lập trình tự phân bổ tín hiệu đầu vào tương tự như cho |
0 |
|
1 |
Có thể tự do phân bổ tín hiệu đầu vào. |
||||
|
1 |
Tín hiệu / S-ON (Servo ON khi thấp.) |
0 |
Đầu vào từ SI0 (CN1-40) đầu vào |
0: SI0 |
|
|
1 |
Đầu vào từ SI1 (CN1-41) đầu vào |
||||
|
2 |
Đầu vào từ SI02(CN1-42) đầu vào ký hiệu đầu cuối. |
||||
|
3 |
Đầu vào từ SI3 (CN1-43) đầu vào |
||||
|
4 |
Đầu vào từ SI4 (CN1-44) đầu vào |
||||
|
5 |
Đầu vào từ SI5 (CN1-45) đầu vào |
||||
|
6 |
Đầu vào từ SI6 (CN1-46) đầu vào |
||||
|
7 |
Bộ tín hiệu ON. |
||||
|
8 |
Bộ tín hiệu OFF. |
||||
|
9 |
Đầu vào tín hiệu đảo ngược từ các SI0 |
||||
|
A |
Đầu vào tín hiệu đảo ngược từ các SI1 |
||||
|
B |
Đầu vào tín hiệu đảo ngược từ các SI2 |
||||
|
C |
Đầu vào tín hiệu đảo ngược từ các SI3 |
||||
|
D |
Đầu vào tín hiệu đảo ngược từ các SI4 |
||||
|
E |
Đầu vào tín hiệu đảo ngược từ các SI5 |
||||
|
F |
Đầu vào tín hiệu đảo ngược từ các SI6 |
||||
|
2 |
Tín hiệu / P-CON |
0 đến F |
Tương tự như trên. |
1: SI1 |
|
|
3
|
Tín hiệu P-OT |
0 đến F
|
Tương tự như trên.
|
2: SI2 |
|
|
Pn50B |
0 |
Tín hiệu N-OT |
0 đến F
|
Tương tự như trên. |
3: SI3 |
|
1
|
Tín hiệu / ALM-RST |
0 đến F
|
Tương tự như trên.
|
4: SI4
|
|
|
2
|
Tín hiệu / P-CL |
0 đến F
|
Tương tự như trên.
|
5: SI5
|
|
|
3 |
tín hiệu / N-CL |
0 đến 8 |
Tương tự như trên. |
6: SI6 |
|
|
Pn50C |
0 |
Tín hiệu / SPD-D (lựa chọn thiết lập tốc độ nội) |
0 đến F |
Tương tự như trên. |
8: OFF |
|
1 |
Tín hiệu / SPD-A (lựa chọn thiết lập tốc độ nội) |
0 đến F |
Tương tự như trên. |
8: OFF |
|
|
2 |
Tín hiệu / SPD-B (lựa chọn thiết lập tốc độ nội) |
0 đến F |
Tương tự như trên. |
8: OFF |
|
|
3 |
Tín hiệu / C-SEL |
0 đến F |
Tương tự như trên. |
8: OFF |
|
|
Pn50D |
0 |
Tín hiệu /ZCLAMP |
0 đến F |
Tương tự như trên. |
8: OFF |
|
1 |
tín hiệu / INHIBIT |
0 đến F |
Tương tự như trên. |
8: OFF |
|
|
2 |
Tín hiệu /G-SEL |
0 đến F |
Tương tự như trên. |
8: OFF |
|
|
3 |
(Reserved) |
0 đến F |
Tương tự như trên. |
8: OFF |
* Khi Pn50A.0 được thiết lập là 0 cho bộ khuếch đại servo SGDH, chỉ có các phương thức sau đây đều tương thích: Pn50A.1 = 7, Pn50A.3 = 8, và Pn50B.0 = 8.
3.Lựa chọn tín hiệu ngõ ra.
|
Thông số |
Số thứ tự |
Tên |
Cài đặc |
Mô tả |
Thiết lập mặc định |
|
Pn50E |
0 |
Tín hiệu / COIN |
0 |
Disabled. |
1: SO1 |
|
1 |
Số lượng ngõ ra từ SO1 (CN1-25, 26) |
||||
|
2 |
Số lượng ngõ ra từ SO2 (CN1-27, 28) |
||||
|
3 |
Số lượng ngõ ra từ SO3 (CN1-29, 30) |
||||
|
1 |
Tín hiệu / V-CMP |
0-3 |
Tương tự như trên. |
1: SO1 |
|
|
2 |
Tín hiệu / TGON |
0-3 |
Tương tự như trên. |
2: SO2 |
|
|
3 |
Tín hiệu / S-RDY |
0-3 |
Tương tự như trên. |
3: SO3 |
|
|
Pn50F |
0 |
Tín hiệu / CLT |
0-3 |
Tương tự như trên. |
0: Không |
|
1 |
Tín hiệu / VLT |
0-3 |
Tương tự như trên. |
||
|
2 |
Tín hiệu / BK |
0-3 |
Tương tự như trên. |
||
|
3 |
Tín hiệu / WARN |
0-3 |
Tương tự như trên. |
||
|
Pn510 |
0 |
Tín hiệu / NEAR |
0-3 |
Tương tự như trên. |
|
|
1 |
Reserved |
0-3 |
Tương tự như trên. |
||
|
2 |
Không sử dụng |
0 |
- |
0 |
|
|
3 |
Không sử dụng |
0 |
- |
0 |
|
|
Pn512 |
0 |
Đầu ra tín hiệu |
0 |
Tín hiệu đầu ra không đảo ngược. |
0: Không |
|
1 |
Tín hiệu đầu ra đảo ngược. |
||||
|
1 |
Đầu ra tín hiệu |
0 |
Tín hiệu đầu ra không đảo ngược. |
||
|
1 |
Tín hiệu đầu ra đảo ngược. |
||||
|
2 |
Đầu ra tín hiệu |
0 |
Tín hiệu đầu ra không đảo ngược. |
||
|
1 |
Tín hiệu đầu ra đảo ngược. |
||||
|
3 |
Không sử dụng |
- |
- |
0 |
4.PLC FX1S
- Đặc tính và đơn vị của plc
1.Kích thước của plc fx1s
Cách đọc ký hiệu:
2.Các đầu ngõ ra vào của plc:
Fx1s-10MT-DSS
Ngõ ra transitor,nguồn DC
3.Cách bố trí sắp xếp không gian của plc
4.Nguồn cung cấp
Cách đấu dây nguồn DC
Trong đó:
1:nguồn cung cấp 24VDC,+10%-15%
2:cầu chì
3:dừng khẩn cấp
4:công tắc nguồn
5:Đèn báo chỉ thị hoạt đông
6:nguồn cung cấp cho tải
7:điện trở nối đất 100Ω hoặc nhỏ hơn
8.cầu chì
9:đơn vị chính
10:CB
Ngõ vào:
Đặc tính ngõ vào 24V
- Cách kết nối dây ở ngõ vào:
1.Ngõ ra:
Đặc tính ngõ ra:
2.Cách đấu dây ở ngõ ra transitor
Trong đó:
1:không sử dụng đầu cực này
2:dừng khẩn cấp
3:cầu chì
4:cuộn dây và tiếp điểm của contactor
5:nguồn cung cấp dc
6:đèn báo
7:diode bảo vệ chống dòng ngược
8:tải cảm
TÀI LIỆU THAM KHẢO
Hướng dẫn sử dụng Sigma II Series Servo System.
FULLY CLOSED INTERFACE UNIT USER'S MANUAL
Kết nối kỹ thuật số Yaskawa Sigma-II Series Amplifier
Động cơ servo
Biên dịch: Lâm Quỳnh Trang - Lê Trọng Hiền - Nguyễn Minh Trung - Đoàn Hiệp
Đại học Bách Khoa Thành Phố Hồ Chí Minh - Chương trinh PFIEV
Programmable Logic Controllers
AC Servo Drives
TIÊU CHUẨN CHỨC NĂNG SERIES SERVOMOTOR LOẠI: SGMAH-SGMPH-, SGMGH-, SGMSH-, SGMDH-
SERIES SERVOPACK LOẠI: SGDM-YASKAWA











