THIẾT KẾ VÀ THI CÔNG mô hình xe vận chuyển hàng tự động
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN THIẾT KẾ VÀ THI CÔNG mô hình xe vận chuyển hàng tự động, thuyết minh THIẾT KẾ VÀ THI CÔNG mô hình xe vận chuyển hàng tự động, mô hình xe vận chuyển hàng tự động
MỤC LỤC
*****
TÊN CHƯƠNG TRANG
LỜI MỞ ĐẦU...................................................................... ..... 3
PHẦN I: THIẾT KẾ - THI CÔNG PHẦN CỨNG...........
CHƯƠNG 1: MÔ TẢ HOẠT ĐỘNG CỦA XE VẬN
CHUYỂN HÀNG TỰ ĐỘNG....................... 4
CHƯƠNG 2: SƠ ĐỒ VÀ CHỨC NĂNG TỪNG KHỐI..... 5
CHƯƠNG 3: THIẾT KẾ VÀ PHÂN TÍCH NGUYÊN LÝ
HOẠT ĐỘNG CỦA TỪNG KHỐI.............. 7
PHẦN II: CHƯƠNG TRÌNH ĐIỀU KHIỂN...............
CHƯƠNG 1: LƯU ĐỒ GIẢI THUẬT............................... 16
CHƯƠNG 2: CHƯƠNG TRÌNH........................................ 19
PHẦN III: LÝ THUYẾT CƠ SỞ .................................
CHƯƠNG 1: KHẢO SÁT VI ĐIỀU KHIỂN 89C51.......... 55
CHƯƠNG 2: MÃ LỆNH.................................................... 58
CHƯƠNG 3 : CẢM BIẾN QUANG................................... 72
CHƯƠNG 4: ĐỘNG CƠ DIỆN MỘT CHIỀU.................. 79
CHƯƠNG 5: GIỚI THIỆU LINH KIỆN TRONG MẠCH 82
CHƯƠNG KẾT LUẬN…………………………………………………………….. 94
TÀI LIỆU THAM KHẢO………………………………………………………… 95
LỜI MỞ ĐẦU
*****
I. ĐẶT VẤN ĐỀ :
Ngày nay cùng với sự phát triển mạnh mẽ về công nghệ thông tin , nền công nghiệp điện tử nước ta đang phát triển mạnh mẽ và được ứng dụng rộng rãi trong mọi ngành nghề , mọi lĩnh vực đời sống từ sản xuất ,kinh tế , giáo dục ,quân sự,khoa học kỹ thuật , các ngành công nghiệp ,… Các hệ thống điều khiển đang dần được tự động hoá với những kỹ thuật tiên tiến như vi xử lý , vi điều khiển ,… được ứng dụng vào nhiều lĩnh vực điều khiển đòi hỏi tốc độ xử lý cao ,chính xác .Vi xử lý,vi điều khiển đang ngày càng được ứng dụng rộng rải trong nhiều lĩnh vực và đã chứng minh được tính ưu việt của nó .
Bên cạnh sự chạy đua về kinh tế giữa các nước trên thế giới , còn có sự chạy đua về công nghệ . Người máy ,các cơ cấu dịch chuyển tự động thực hiện các thao thác đòi hỏi sự chính xác cao ,nhanh và ở những nơi nguy hiểm ,độc hại thay cho con người đang là điểm nóng trong việc nghiên cứu , phát rtiển của các nước .
Do đó nhóm em đã bắt tay vào việc nghiên cứu thực hiện đồ án :” mô hình xe vận chuyển hàng tự động “ . Với mong muốn góp phần làm giảm khó khăn , đảm bảo được độ chính xác và an toàn trong lao động .
II. TẦM QUANG TRỌNG CỦA VẤN ĐỀ:
Xã hội ngày càng tiến bộ ,nhu cầu đòi hỏi của con người ngày càng cao .Các ngàng sản xuất đang ngày càng được tự động hoá ,đòi hỏi sự nhanh chóng chính xác và giảm thiểu được nhân công lao động . Quá trình sản xuất càng được tự động hoá cao càng nâng cao năng xuất , giảm chi phí và tính cạnh tranh của doanh nghiệp .Vì vậy đề tài này được nghiên cứu và thực hiện nhằm đóng góp phần nhỏ vào những mục đích nêu trên. Đồng thời gíup cho sinh viên, học sinh thấy được mối liên hệ giữa những kiến thức đã học ở trường với những ứng dụng bên ngoài thực tế và nó cũng là đề tài tốt nghiệp của nhóm em .
III.ỨNG DỤNG CỦA ĐỀ TÀI:
Đề tài mà nhóm em thiết kế có nhiều ứng dụng quan trọng trong lĩnh vực vận chuyển hàng hoá, xã hội ngày nay ngày càng phát triển với quá trình sản xuất ngày càng tự động hoá , để đáp ứng kịp với sự phát triển của xã hội nên nhóm em đã nghiên cứu và thiết kế xe vận chuyển hàng tự động nhằm giảm thiểu nhân công lao động, thay thế cho sức lao động của con người.
PHẦN I: THIẾT KẾ - THI CÔNG PHẦN CỨNG
CHƯƠNG1: MÔ TẢ HOẠT ĐỘNG CỦA XE VẬN CHUYỂN HÀNG TỰ ĐỘNG
*****
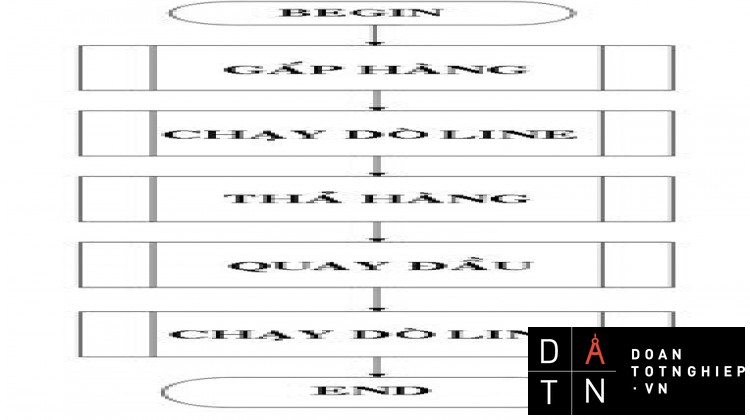
Đây là mô hình xe vận chuyển hàng tự động, vận chuyển hàng ngoài bãi vào kho chứa hàng theo đường đi cố định đã được định sẳn, trên đường đi có những vạch hàng ngang nhằm giúp cho xe xác định được quảng đường đi nhờ vào cảm biến đếm line mà người lập trình đã định sẳn số line . Nếu trên đường đi xe bị lệch ra khỏi đường đi thì nó tự động điều chỉnh lại vào đúng đường đi nhờ vào 2 cảm biến dò line.
Xe từ kho di chuyển đến vị trí lấy hàng ,sau khi đếm đủ số line xe dừng lại đúng nơi có hàng và hạ tay gắp để gắp hàng, sau khi gắp hàng xong xe sẽ kéo tay gắp ra sau và xe quay đầu lại di chuyển đưa hàng vào kho , trên đường về xe cũng đếm đủ số line đã được định sẳn thì xe dừng lại, kéo tay gắp ra trước và hạ tay gắp xuống nhả hàng ra đặt đúng vị trí cần đặt hàng. Cứ theo chu kì như vậy xe tiếp tục vận chuyển hàng cho đến khi nào ta tác động cho xe dừng lại thì xe sẽ ngừng hoạt động.
Ngoài ra xe còn có chức năng hiển thị số line và hiển thị trạng thái mà xe đang hoạt động ,trong quá trình vận chuyển hàng nếu xe gắp hàng thì khối hiển thị ma trận sẽ hiển thị chữ GAP – HANG. Nếu xe thả hàng thì khối hiển thị ma trận sẽ hiển thị chữ THA – HANG..v…v..
Nếu cảm biến đếm line đếm được 1 line thì khối hiển thị 7 đoạn sẽ hiển thị số 1 và cứ như vậy cảm biến đếm line đếm được bao nhiêu line thì khối hiển thị 7 đoạn sẽ hiển thị số tương ứng với số line đã đếm.
CHƯƠNG2: SƠ ĐỒ VÀ CHỨC NĂNG TỪNG KHỐI
*****
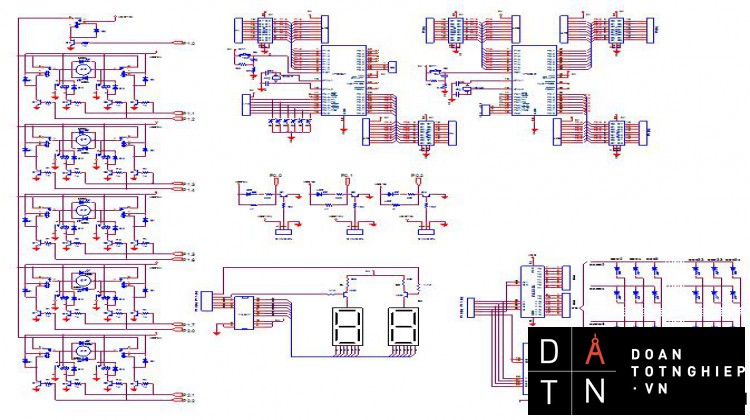
I. SƠ ĐỒ NGUYÊN LÝ CHUNG CHO CÁC KHỐI:
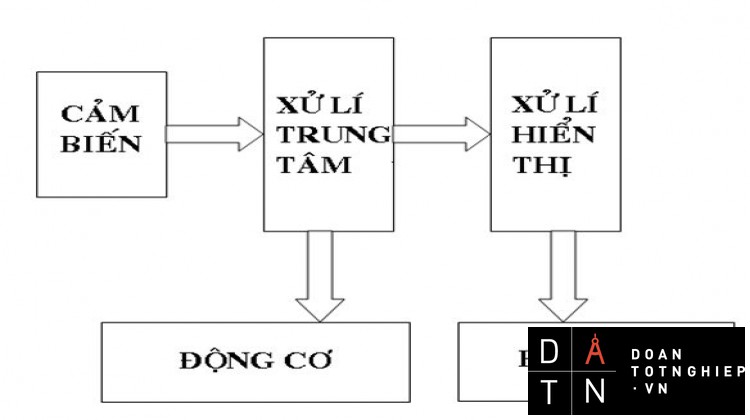
II.SƠ ĐỒ KHỐI VÀ CHỨC NĂNG TỪNG KHỐI :
– Khối vi xử lý : Xử lý mọi hoạt động của hệ thống .
– Khối cảm biến : Có nhiệm vụ nhận biết vạch chính xác đưa tín hiệu về xử lý ,xử lý tính hiệu
– Khối hiển thị : gồm hai khối .
4Khối hiển thị led 7 đoạn hiển thị số vạch
4Khối hiển thị ma trận hiển thị hoạt động của hệ thống
- Phần tử vận hành : động cơ điện một chiều 12V .
CHƯƠNG 3: THIẾT KẾ VÀ PHÂN TÍCH NGUYÊN LÝ HOẠT ĐỘNG CỦA TỪNG KHỐI
*****
I. KHỐI CẢM BIẾN VÀ XỬ LÝ TÍN HIỆU CẢM BIẾN :
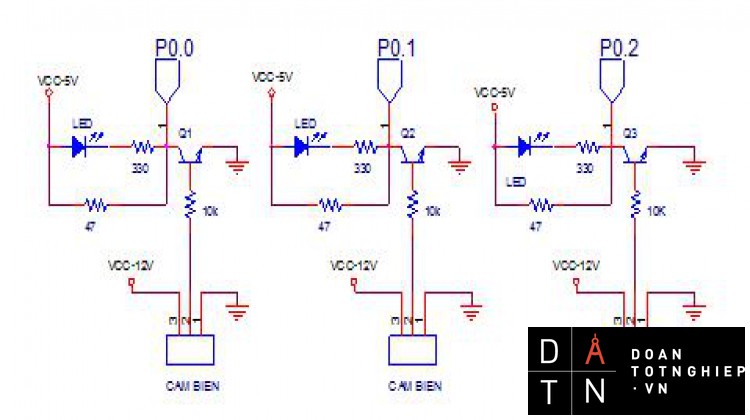
1.Sơ đồ nguyên lý:
2.Nguyên lý hoạt đông:
Cảm biến cảm nhận các vạch đã định sẵn và chuyển đổi thành tín hiệu điện. Do tín hiệu điện của cảm biến đưa ra 12V.Mà vi xử lý làm việc ở mức điện áp 5V, cần phải xử lý tín hiệu điện12V của cảm biến còn lại 5V.
Khi cảm biến nhận được tín hiệu chuyển thành tín hiệu điện kích cho transistor làm cho Transistor dẫn tín hiệu đưa đến vi xử lý tích cực ở mức 0 đồng thời led sáng.
Khi cảm biến không nhận được tín hiệu thì không kích Transistor . Transistor ở trạng thái ngưng dẫn tín hiệu đưa đến vi xử lý tích cực ở mức 1 đồng thời led tắt .
3.Tính toán:
Cảm biến:
Vin =12V
Vout =12V
Iout = 1,2mA
Khi Transisror dẫn bão hoà :
Iout .RB + VBE =12V
=>
Chọn RB = 10k
Và IC =
Rled =
IRc = IC –Iled = 120mA – 10mA =110mA
RC =
Chọn RC = 47
II.KHỐI ĐIỀU KHIỂN RELAY:
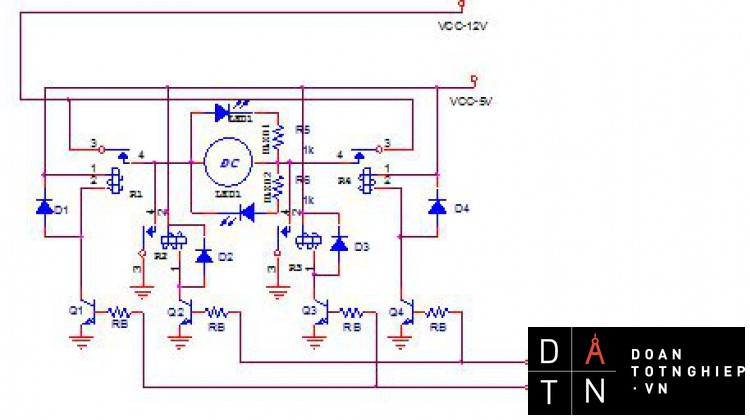
1.Sơ đồ nguyên lý:
2.Nguyên lý hoạt động:
Khi bit điều khiển1 của 89C51 ở mức cao thì Transistor Q2 và Q4 được phân cực thuận nên chúng dẫn và dẫn bão hoà dẫn đến VCE ở mức thấp, khi đó relay R2 , R4 đóng tiếp điểm cấp nguồn cho động cơ quay theo chiều thuận.
Khi bit điều khiển 2 của 89C51 ở mức cao thì Transistor Q1,Q3 được phân cực thuận nên chúng dẫn và dẫn bão hoà , dẫn đến VCE ở mức thấp, khi đó relay R1,R3 đóng tiếp đỉêm cấp nguồn cho động cơ quay theo chiều nghịch.
Diode D1, D2,D3,D4 mắc song song với relay tương ứng và được phân cực nghịch có tác dụng nối tắt diện áp ngược nhằm bảo vệ cho Transistor khỏi bị hỏng.
3.Tính toán mạch:
Transistor mã hiệu C1815 loại NPN có các thông số sau:
Pmax = 900mW
VCEmax = 30 V
ICmax = 1A
Hệ số khuếch đại = 60
Relay 12V
RB phân cực cho Transistor, R5, R6 hạn dòng cho 2 led tương ứng
Chọn Vled =1,7V; Iled =10mA
Vì dòng qua relay IL 100mA nên ta chọn :
IC = IR5 + IL = 60mA
IR5 =Iled = 10mA
=> R5 =
=> R5 = R6 = 330
Ta có: IC =
IB =
Mặt khác: IB .RB +VBE = 5V
=> RB =
Chọn RB = 4,7 K
III.KHỐI HIỂN THỊ 7 ĐOẠN:
1.Sơ đồ nguyên lý:
2.Nguyên lý hoạt động:
Để kích cho led 7 đoạn sáng thì chân kathod được kích mức thấp và chân Anod được kích ở mức cao. Khi cực B của Transistor (PNP) được kích mức thấp thì nó sẽ được phân cực thuận và dẫn bão hoà đồng thời sẽ có dòng điện đi từ cực E sang cực C để kích cho led 7 đoạn sáng.
3.Phương pháp quét led:
Để hiển thị những con số trên led 7 đoạn (số thập phân) ta phải giải mã các số dạng nhị phân tương ứng.Vì led 7 đoạn loại Anod chung nên ta xuất các số nhị phân ở mức thấp (mức 0) cho con số cần hiển thị và xuất tín hiệu mức cao kích cho led dẫn.
VD:
Để sáng số 2 dạng thập phân thì ta cho chân kathod của các đoạn a, b, d, e, g tích cực ở mức thấp và các đoạn c, f kích ở mức cao sau đó kích Anod ở mức cao thì led 7 đoạn sẽ sáng số 2 dạng thập phân.
Tại 1 thời điểm chỉ có 1 led sáng. Mắt chỉ phân biệt được tần số chớp dưới 24Hz
Như vậy muốn tạo ảnh liên tục thì các phần tử ảnh xuất hiện liên tục tối thiểu 30lần/1s.
4.Tính toán:
Điện áp ra mức thấp:
Vout 0V
Chọn Vled =2V; Iled =10mA
Tính chọn R1 và R3 :
VR1 = VCC - Vled + VCE
= 5V - 2V + 0V = 3V
Mà R1 =
Chọn R1 = R3 = 220
Tính chọn R2 và R4 :
VR2 = VCC -VR2 +VBE
R2 =
Ta chọn R2 = R4 = 4,7K
IV. KHỐI HIỂN THỊ MA TRẬN:
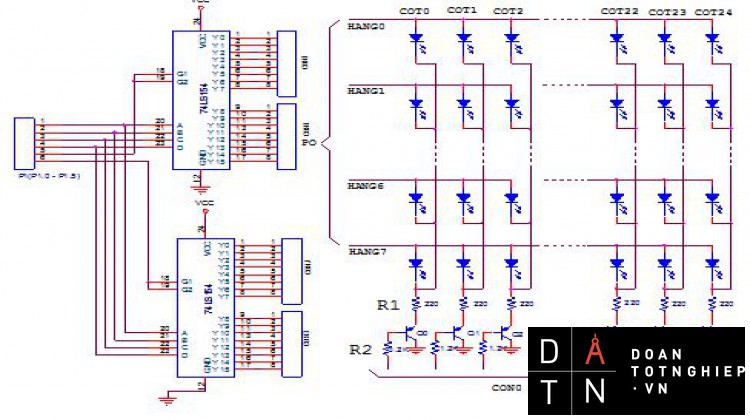
1. Sơ đồ nguyên lý :
2. Nguyên lý hoạt động :
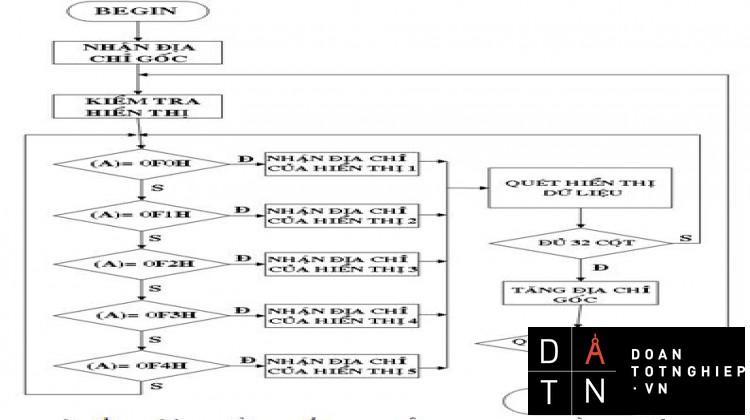
Ta dùng 2 IC giải mã 4 sang 16 ( 74LS154 ) quét lần lượt 32 cột .
Ứng với mỗi giá trị nhị phân 4 bit( P1.0 đến P1.3 ) đưa vào các chân A,B,C,D của 74LS154 là một ngõ ra ở trang thái tích cực ( mức logic 0).
Giả sử nếu như ngõ vào có giá trị nhị phân là 0000B thì lúc này ngõ ra Y0 sẽ có mức logic 0 , các ngõ còn lại sẽ có mức logic 1 ứng với một cột của ma trận led tích cực. Cứ như vậy nếu ta lần lượt tăng giá tri nhị phân ở port 1 (từ 0000B đến 1111B ) thì ngõ ra của 74LS154 (từ Y0 đến Y15 ) sẽ lần lượt tích cực (mức logic 0)
Hai bit P1.4 và P1.5 được nối với 2 bit điều khiển của 2 IC 74LS154 để chọn lần lượt hoạt động của 2 IC .Cứ như vậy ta quét được lần lượt 32 cột led ma trận .
Dữ liệu là số nhị phân 8 bit được đưa ra từ port 0 sẽ kích cho các led tương ứng ở cột tích cực sáng .
3.Phương pháp quét:
Để hiển thị chữ trên led ma trận ( với 32 cột ) ta cho hiển thi dữ liệu tương ứng trên từng cột rồi cho lặp lại nhiều lần (sau cho tần số quét lớn hơn 24Hz ) .Mắt chi phân biệt được sự chớp tắt với tần số dưới 24Hz nên ta sẽ có hình ảnh hoàn chỉnh cần hiển thị .
4.Tính toán :
Transistor mã hiệu A564 loại PNP có các thông số sau:
Pmax = 250mW
VCEmax = 30 V
ICmax = 50mA
Hệ số khuếch đại = 100
Chọn : Vled = 2V
Iled = 10mA
Điện áp đưa ra từ vi xử lý Vmp = 5V.
Tính chọn R1:
Tacó :
Iled = IR1 = 10mA
Vmp = Vled + VR1 + VCES
- VR1 = Vmp – (Vled + VCES ) = 5 – 2,2 =2,8 V
R1 =
(trường hợp 1 led sáng )
Ta chọn R1 = 220
Tính chọn R2 :
Vì Transistor dẫn bão hoà nên:
VR2 =VC + VEB =VC - VBE
= 0 ,2 - 0.8 = 0,6V
Mà IBS =
Lấy R2 = 1,2K
IV.MẠCH RESET:
1.Sơ đồ nguyên lý:
2.Nguyên lý hoạt động:
Reset bằng tay:
Yêu cầu của mạch reset là điện áp ngỏ ra tối thiểu là 2 chu kỳ máy (2).
Khi nhấn nút reset thì điện áp ở ngỏ ra ở mức cao và ngược lại thì ở nức thấp .
Reset tự động :
Khi mới cấp điện thì tụ bắt đầu nạp khi đó :
VCC = 5V = VC + VR
Tại thời điểm t = 0 : tụ C chưa nạp
..........................
89C51 được reset bằng cách giử chân reset mức cao trong hai chu kỳ mày .
Bộ dao động trên chip được lái bởi thạch anh 12MHz .Một chu kỳ máy của 89C51 ó 12 chu kỳ xung nhịp nên một chu kỳ máy kéo dài trong 1
Theo khuyến cáo của nhà sản xuất ta có thể sử dụng lại giá trị linh kiện được giới thiệu trong sách vi điều khiển 8051.
Tìm điện áp ngỏ ra trên R2 khi reset:
Ta có :
Reset tự động :
Khi mới cấp điện tụu C sẽ nạp điện từ 0V đến 2/3VCC rồi sau đó tụ xã 2/3 VCC xuống ½ VCC chú không xã xuống 0 V.
Nhưng chu kỳ sau tụ sẽ nạp từ ½ VCC chứ không nạp từ 0V nữa . Như vậy điện áp ngỏ ra khi reset lần đầu là 5V và điện áp ngỏ ra cho lần reset tiếp theo là 5V – ½ .5 = 2,5V.
Thời gian của tụ nạp được tính theo công thức :
tnạp = RC
= 8,2 . 103 . 10. 10-6 = 0,082 s
= 82. 103
Thời gian tụ nạp tại mức ½ CC
tnạp = 0,69.RC
= 0,69.8,2 . 103 . 10. 10-6 = 0,052 s
= 52. 103
V. SƠ ĐỒ MẠCH IN :
PHẦN II: CHƯƠNG TRÌNH ĐIỀU KHIỂN
CHƯƠNG 1: LƯU ĐỒ GIẢI THUẬT
********
I. LƯU ĐỒ CHƯƠNGTRÌNh
LƯU ĐỒ CHƯƠNGTRÌNH CHÍNH
II. LƯU ĐỒ CHƯƠNG TRÌNH CHẠY DÒ LINE
LƯU ĐỒ CHƯƠNG TRÌNH CHẠY DÒ LINE
III. LƯU ĐỒ CHƯƠNG TRÌNH HIỂN THỊ :
LƯU ĐỒ CHƯƠNG TRÌNH HIỂN THỊ TRÊN LED 7 ĐOẠN VÀ MA TRẬN
CHƯƠNG 2 : CHƯƠNG TRÌN******
I. CHƯƠNG TRÌNH ĐIỀU KHIỂN XE :
;CHUONG TRINH DIEU KHIEN XE
MCS-51 MACRO ASSEMBLER TAM 10/05/:5 PAGE 1
DOS 5.0 (038-N) MCS-51 MACRO ASSEMBLER, V2.2
OBJECT MODULE PLACED IN C:\Program Files\VI XU LY\DOANVXL.OBJ
ASSEMBLER INVOKED BY: ??? C:\Program Files\VI XU LY\DOANVXL.asm
LOC OBJ LINE SOURCE
1 ;CHUONG TRINH DIEU KHIEN XE
0000 2 ORG 0000H
0000 758000 3 MOV P0,#00H
0003 759000 4 MOV P1,#00H
0006 75A000 5 MOV P2,#00H
0009 75B000 6 MOV P3,#00H
7
000C 7400 8 AGAIN: MOV A,#00H
000E 7F00 9 MOV R7,#00
10 MAIN:
0010 7E00 11 MOV R6,#0
0012 7F00 12 MOV R7,#0
13
14
0014 1200E9 15 LCALL GAP_HANG
0017 120159 16 LCALL DELAY_NGHI
001A 120039 17 LCALL CHAY_DOLINE
001D 0E 18 INC R6
001E 120159 19 LCALL DELAY_NGHI
0021 1200A6 20 LCALL QUAY_DAU
0024 120159 21 LCALL DELAY_NGHI
22
0027 7F00 23 MOV R7,#0
0029 120039 24 LCALL CHAY_DOLINE
002C 1200A6 25 LCALL QUAY_DAU
002F C290 26 CLR P1.0
0031 C292 27 CLR P1.2
0033 120159 28 LCALL DELAY_NGHI
29
0036 02000C 30 LJMP AGAIN
31 CHAY_DOLINE:
0039 308008 32 BACK: JNB P0.0,X1
003C 30810D 33 JNB P0.1,X2 ;P0.0=1,P0.1=1
34
003F 12005E 35 LCALL CHAY_THANG
0042 8012 36 SJMP LOOP1
37
0044 30810A 38 X1: JNB P0.1,X3 ;P0.0=0,P0.1=1
39
0047 120072 40 LCALL CHAY_B2
004A 800A 41 SJMP LOOP1
42
004C 120086 43 X2: LCALL CHAY_B1 ;P0.0=1,P0.1=0
004F 8005 44 SJMP LOOP1
45
0051 12009A 46 X3: LCALL CHAY_NGOAILINE ;P0.0=0,P0.1=0
0054 8000 47 SJMP LOOP1
48
0056 BF0CE0 49 LOOP1: CJNE R7,#12,BACK
0059 C290 50 CLR P1.0
MCS-51 MACRO ASSEMBLER TAM 10/05/:5 PAGE 2
LOC OBJ LINE SOURCE
005B C292 51 CLR P1.2
005D 22 52 RET
53
54 CHAY_THANG:
55
005E C291 56 CLR P1.1
0060 C293 57 CLR P1.3
0062 D290 58 SETB P1.0
0064 D292 59 SETB P1.2
0066 308205 60 JNB P0.2,XA
0069 1200D4 61 LCALL DEM_LINE
006C 8000 62 SJMP XA
63
006E 00 64 XA: NOP
006F 00 65 NOP
0070 00 66 NOP
67
0071 22 68 RET
69
70 CHAY_B2:
71
0072 C291 72 CLR P1.1
0074 C293 73 CLR P1.3
0076 C292 74 CLR P1.2
0078 D290 75 SETB P1.0
007A 308205 76 JNB P0.2,XB
007D 1200D4 77 LCALL DEM_LINE
0080 8000 78 SJMP XB
79
0082 00 80 XB: NOP
0083 00 81 NOP
0084 00 82 NOP
83
0085 22 84 RET
85
86 CHAY_B1:
87
0086 C291 88 CLR P1.1
0088 C293 89 CLR P1.3
008A C290 90 CLR P1.0
008C D292 91 SETB P1.2
008E 308205 92 JNB P0.2,XC
0091 1200D4 93 LCALL DEM_LINE
0094 8000 94 SJMP XC
95
0096 00 96 XC: NOP
0097 00 97 NOP
0098 00 98 NOP
0099 22 99 RET
100
101 CHAY_NGOAILINE:
009A C290 102 CLR P1.0
009C C292 103 CLR P1.2
009E D291 104 SETB P1.1
00A0 D293 105 SETB P1.3
MCS-51 MACRO ASSEMBLER TAM 10/05/:5 PAGE 3
LOC OBJ LINE SOURCE
00A2 00 106 NOP
00A3 00 107 NOP
00A4 00 108 NOP
00A5 22 109 RET
110
111 QUAY_DAU:
00A6 C291 112 CLR P1.1
00A8 C292 113 CLR P1.2
00AA D293 114 SETB P1.3
00AC D290 115 SETB P1.0
00AE 120170 116 LCALL DELAY_CHO
00B1 C290 117 CLR P1.0
00B3 C293 118 CLR P1.3
00B5 22 119 RET
120
121 QUEO_PHAI:
00B6 C291 122 CLR P1.1
00B8 C293 123 CLR P1.3
00BA C292 124 CLR P1.2
00BC D290 125 SETB P1.0
00BE 00 126 NOP
00BF 00 127 NOP
00C0 00 128 NOP
00C1 120159 129 LCALL DELAY_NGHI
00C4 22 130 RET
131
132 QUEO_TRAI:
00C5 C291 133 CLR P1.1
00C7 C293 134 CLR P1.3
00C9 C290 135 CLR P1.0
00CB D292 136 SETB P1.2
00CD 00 137 NOP
00CE 00 138 NOP
00CF 00 139 NOP
00D0 120159 140 LCALL DELAY_NGHI
00D3 22 141 RET
142
143
144 DEM_LINE:
00D4 2082FD 145 JB P0.2,$
00D7 0F 146 INC R7
00D8 BF060D 147 CJNE R7,#06,XE
00DB BE0105 148 CJNE R6,#1,XD
00DE 1200C5 149 LCALL QUEO_TRAI
00E1 8005 150 SJMP XE
00E3 1200B6 151 XD: LCALL QUEO_PHAI
00E6 8000 152 SJMP XE
00E8 22 153 XE: RET
154
155 GAP_HANG:
156
00E9 120159 157 LCALL DELAY_NGHI
00EC C294 158 CLR P1.4
00EE D295 159 SETB P1.5 ;KEO GAP RA SAU
00F0 30B1FD 160 JNB P3.1,$
MCS-51 MACRO ASSEMBLER TAM 10/05/:5 PAGE 4
LOC OBJ LINE SOURCE
00F3 C295 161 CLR P1.5
00F5 120159 162 LCALL DELAY_NGHI
00F8 C297 163 CLR P1.7
00FA D296 164 SETB P1.6 ;HA GAP
00FC 30B4FD 165 JNB P3.4,$
00FF C296 166 CLR P1.6
0101 120159 167 LCALL DELAY_NGHI
0104 D2A0 168 SETB P2.0 ;GAP HANG
0106 30B2FD 169 JNB P3.2,$
0109 C2A0 170 CLR P2.0
010B 120159 171 LCALL DELAY_NGHI
172
010E D297 173 SETB P1.7 ;NANG GAP
0110 30B5FD 174 JNB P3.5,$
0113 C297 175 CLR P1.7
0115 120159 176 LCALL DELAY_NGHI
0118 22 177 RET
178
179 THA_HANG:
180
0119 120159 181 LCALL DELAY_NGHI
182
011C C295 183 CLR P1.5
011E D294 184 SETB P1.4 ;KEO GAP RA TRUOC
0120 30B0FD 185 JNB P3.0,$
0123 C294 186 CLR P1.4
0125 120159 187 LCALL DELAY_NGHI
188
0128 C297 189 CLR P1.7
012A D296 190 SETB P1.6 ;HA GAP
012C 30B4FD 191 JNB P3.4,$
012F C296 192 CLR P1.6
0131 120159 193 LCALL DELAY_NGHI
194
0134 C2A0 195 CLR P2.0
0136 D2A1 196 SETB P2.1 ;THA HANG
0138 30B3FD 197 JNB P3.3,$
013B C2A1 198 CLR P2.1
013D 120159 199 LCALL DELAY_NGHI
200
0140 C296 201 CLR P1.6
0142 D297 202 SETB P1.7 ;NANG GAP
0144 30B5FD 203 JNB P3.5,$
0147 C297 204 CLR P1.7
0149 120159 205 LCALL DELAY_NGHI
014C C294 206 CLR P1.4
014E D295 207 SETB P1.5 ;KEO GAP RA SAU
0150 30B1FD 208 JNB P3.1,$
0153 C295 209 CLR P1.5
0155 120159 210 LCALL DELAY_NGHI
211
0158 22 212 RET
213
214 DELAY_NGHI: ;2S
215
MCS-51 MACRO ASSEMBLER TAM 10/05/:5 PAGE 5
LOC OBJ LINE SOURCE
0159 758901 216 MOV TMOD,#01H
...........................................
b. Các phương trình cơ bản :
- Phương trình đặc tính cơ :
- Phương trình đặc tính tốc độ :
Trong đó :
- n : tốc độ quay của động cơ .
- U :điện áp đặt vào động cơ .
- R :tổng trở trên phần ứng .
- I : dòng điện chạy trong phần ứng .
- M : moment của động cơ .
- Ư : từ thông dưới một cực từ chính .
- KE : hệ số suất điện động phụ thuộc vào cấu tạo .
- KM : hệ số moment của động cơ .
CHƯƠNG 5: GIỚI THIỆU LINH KIỆN TRONG MẠCH
******
I .TRANSISTOR
1.Cấu tạo:
Transistor là linh kiện bán dẫn gồm 3 lớp : PNP hay NPN.
a .Transistor loại PNP:
Ký hiệu: Cấu tạo:
b. Transistor loại NPN
Ký hiệu : Cấu tạo:
Vể mặt vật lý transistor gồm ba phần :cực phát ,cực nền và cực thu.
Vùng nền rất mỏng .
Transistor công suất có ký hiệu như sau:
Ký hiệu transistor công suất .
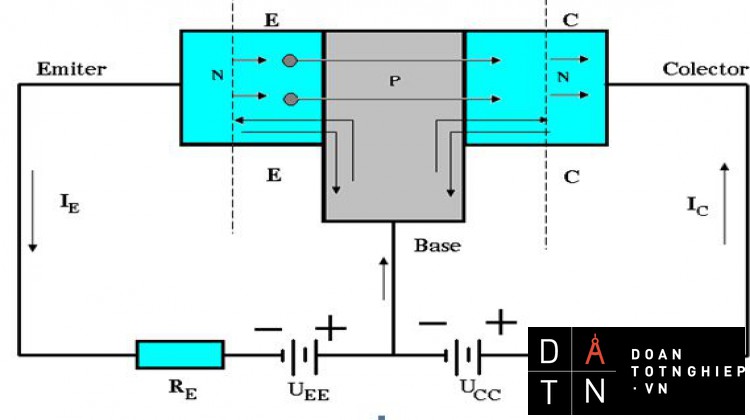
2.Nguyên lý hoạt động :
Sơ đồ phân cực transistor
Điện thế UEEphân cực thuận mối nối P – E (P_N) là nguyên nhân làm cho vùng phát (E) phóng điện tử vào vùng nền (B). Hầu hết các điện tử (electron) sau khi qua vùng B rồi qua tiếp mối nối thứ hai phía bên phải hướng tới vùng thu (C) ,khoảng 1% electron được giữ lại ở vùng B .Các lỗ trống vùng nền di chuyển vào vùng phát.
Mối nối B –E ở chế độ phân cực thuận như một diode ,có điện kháng nhỏ và điện áp rơi trên nó nhỏ thì mối nối B – C được phân cực nghịch và điện kháng mối nối B – C rất lớn.
Dòng điện đo được trong vùng phát gọi là dòng phát IE . Dòng điện đo được trong mạch cực C (số lượng điện tích qua đường biên CC trong một đơn vị thời gian là dòng cực thu IC).
Dòng IC gồm hai thành phần
Thành phần thứ nhất (thành phần chính ) là tỷ lệ của hạt electron ở cực phát tới cực thu .Tỉ lệ này phụ thuộc duy nhất vào cấu trúc của transistor riêng biệt .Hằng số đã được định nghĩa là a. Vậy thành phần chính của dòng IC là aIE (thông thường a= 0,999).
Thành phần thứ hai là dòng qua mối nối B – C ở chế độ phân cực nghịch khi IE= 0 .Dòng này gọi là dòng ICBO,nó rất nhỏ.
Vậy dòng qua cực thu :IC = aIE + ICBO.
Các thông số của transistor công suất :
- IC : dòng colector mà transistor chịu được .
- UCEsat : Điện áp UCE khi transistor dẫn bảo hoà .
- UCEO : Điện áp UCE khi mạch bazơ để hở ,IB = 0 .
- UCEX : Điện áp UCE khi bazơ bị khoá bởi điện áp âm .,IB <0 .
- ton : thời gian cần thiết để UCE từ giá trị điện áp nguồn U giảm xuống UCEsat = 0.
- tf : thời gian cần thiết để IC giảm xuống 0.
- ts : thời gian cần thiết để UCE từ giá trị UCEsat tăng đến giá trị điện áp nguồn U.
- P : Công suất tiêu tán bên trong transistor .Công suất tiêu tán bên trong transistor được tính theo công thức :
Khi transistor ở trạng thái mở : IB = 0 ,IC = 0 nên P = 0 .
Khi transistor ở trạng thái đóng :UCE = UCEsat .
Trong thực tế transistor công suất thường được cho làm việc ở chế độ khóa ;IB = 0 ,IC = 0 , transistor được coi như hở mạch . Nhưng với dòng điện gốc ở trạng thái có già trị bảo hoà , thì transistor trở về trạng thái đóng hoàn toàn .Transistor là một linh kiện phụ thuộc nên cần phối hợp dòng điện gốc và dòng điện góp .Ở trạng thái bảo hoà để duy trì khả năng điều khiển và tránh điện tích ở cực gốc quá lớn , dòng điện gốc ban đầu cao hơn để chuyển sang trạng thái dẫn nhanh chóng .Ở chế độ khoá dòng đện gốc phải giảm cùng quy luật như dòng điện góp để tránh hiện tượng chọc thủng thứ cấp .
Trạng thái dẫn và trạng thái bị khoá
a). Trạng thái đóng thái hay ngắn mạch dòng IB lớn ,dòng IC do tải giới hạn .
b). Trạng thái hở mạch dòng IB = 0
Các tổn hao chuyển mạch của transistor có thể lớn .Trong lúc chuyển mạch ,điện áp trên các cực và dòng điên của các transistor cũng lớn .Tích của dòng điện và điện áp cùng với thời gian chuyển mạch tạo nên tổn hao năng lượng trong một lần chuyển mạch .Công suất tổn hao chính xác do chuyển mạch là hàm số của các thông số của mạch phụ tải và dạng biến thiên của dòng điện gốc .
Transistor NPN mã hiệu C1815 có các thông số :
Pmax = 900mW
VCEmax = 30 V
ICmax = 1A
Hệ số khuếch đại = 60
Transistor PNP mã hiệu A564 có các thông số sau:
Pmax = 250mW
VCEmax = 30 V
ICmax = 50mA
Hệ số khuếch đại = 100
Cả hai loại transistor đều hoạt động ở trạng thái bảo hoà
II. THẠCH ANH
Thạch anh sử dụng có tần số hoạt động là 12Mhz để làm nguồn dao đông cho vi điều khiển AT89C51 .
Trong thực tế có nhiều cách tạo nguồn dao động nhưng chúng có nhược điểm là tần số dao dộng không ổn định . Để có được tần số dao động chính xác ổn định và không thay đổi được , người ta dùng khung cộng hưởng
L – C bằng tinh thể thạch anh .
Thạch anh có hai tần số cộng hưởng .
Tần số cộng hưởng nối tiếp :
Hz
Tần số cộng hưởng song song :
R: điện trở tổn hao của thạch anh (R≈ 0)
Co : điện dung của hai má kim loại .
Thạch anh có những tính chất sau :
Hệ số phẩm chất rất cao
Q = 104 ÷ 106 (đặc trưng cho tính chọn lọc tần số ).
Tỉ số L/C rất lớn .
C << Co (Co từ 10 ÷ 100pF)
(C từ 0,01 ÷ 0,1pF)
Độ ổn định rất cao .
III. IC GIẢI MÃ (4 SANG 16 ) 74LS154:
1.Sơ đồ chân :
- Chưc năng chân :
- G1,G2 : 2 chân điều khiển .
- A,B,C,D : 4 ngỏ vào tương ứng .
- Y0 … Y15 : 16 ngõ ra ứng với một trạng thái (tích cực mức logic 0)
- Hoạt động
²Bảng trạng thái :
H : mức logic 1 ; L : mức logic 0 ; X : mức logic 0 hoặc 1
Khi ta cấp mass cho hai chân G1 và G2 tức là cho phép IC này hoạt động ở chức năng giải mã . Lúc đó ở các ngõ vào D C B A ( D là trọng số lớn ) sẽ là giá trị chọn một ngõ ra tương ứng với giá trị nhị phân của trạng thái đó ( xem bảng trạng thái ) các ngõ còn lại sẽ không được chọn ( mức logic 1 ) .
Giả sử nếu như ngõ vào có giá trị nhị phân là 0001 thì lúc này ngõ ra Y1 sẽ có mức logic 0 , các ngõ còn lại sẽ có mức logic 1.
Nếu một trong hai chân G1 hoặc G2 ở mức logic 1 thì IC không thực hiện chức năng giải mã .Tất cả các ngõ ra đều ở mức logic 1 (không quan tâm đến điện áp ngõ vào D C B A ).
IV. IC ĐỆM (IC 74LS245 )
- Sơ đồ chân:
2.Chức năng các chân:
- G : Chân chốt dữ liệu .
- DIR : Chân điều khiển chiều đệm dữ liệu .
- Các chân A1 … A8 VÀ B1 … B8 : các chân xuất nhập dữ liệu
3.Hoạt động :
IC 74HC245 có chức năng đệm dòng (dòng điện khi qua mạch đệm sẽ được tăng lên ) thuộc họ TTL (Vmax = 5V ).
IC 74HC245 có khả năng đệm hai chiều vào hoặc ra và được điều khiển bằng chân số 1 (chân DIR :direct).
Được thiết kế với tám đường dữ liệu ra vì vậy có thể dùng để giao tiếp với các port ở bên ngoài của AT89C51 ( một port có 8 bit tương ứng với 8 đường dữ liệu ).
Bảng trạng thái :
|
Ngõ vào |
Ngõ ra |
|
|
E |
DIR |
|
|
0 0 1 |
0 1 X |
Dữ liệu từ bus B đến bus A Dữ liệu từ bus A đến bus B Không sử dụng
|
Đặc tính hoạt động :
|
Ký hiệu |
Thông số |
Min |
Max |
Đơn vi |
|
Vcc |
Nguồn cung cấp |
4,5 |
5,5 |
V |
|
Ta |
Nhiệt độ làm việc |
-55 |
125 |
OC |
|
IOH |
Dòng ra mức cao |
|
-3 |
mA |
|
IOL |
Dòng ra mức thấp |
|
12 |
mA |
Tính toán chọn điện trở hạn dòng cho led:
Chọn dòng qua led 10mA , và điện áp rơi trên led là 2V,
Chọn R = 330
V. IC GIẢI MÃ LED 7 ĐOẠN (IC74LS47)
1.sơ đồ chân :
2.Bảng trạng thái
3. Hiển thị :
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
VI . LED 7 ĐOẠN
1. Cấu tạo :
Cathode chung Anode chung
Sử dụng với :
Imin = 40mA;Vmin = 1,5V
Imax = 160mA;Vmax = 3V
Led phát sáng với dòng thuận qua no’.
Led yêu cầu diện áp thấp và rất bền .
Dòng thuận ra của các phần tử bán dẫn TTL,CMOS đủ để kích sáng led .
Led không nháy nếu dòng điên qua nó có tần số ≥ 50Hz .Có thể điều khiển led theo mức logic cao hoặc thấp .
Có hai phương pháp giải mã để led 7 đoạn giao tiếp với vi điều khiển AT89C51 .
2.Giảm mã bằng phần cứng :
Thiết kế cho việc giải mã từ BCD sang thập phân cần thiết là sử dụng vi mạch giải mã và kích đèn led 7 đoạn MC1499 của Motorola, vi mạch này chứa bên trong nhiều mạch cần thiết cho việc kích led 7 đoạn . Có thể sử dụng IC 4515 là vi mạch giải mã từ BCD sang led 7 đoạn ,ngõ vào là mã nhi phân ,ngõ ra là mã led 7 đoạn tác động mức thấp
Bảng mã led 7 đoạn (cathode chung) :
|
Số thập phân |
Số Hex |
p |
g |
f |
e |
d |
c |
b |
a |
|
0 |
C0H |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
F9H |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
|
2 |
A4H |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
|
3 |
B0H |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
|
4 |
99H |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
|
5 |
92H |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
|
6 |
82H |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
7 |
F8H |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
|
8 |
80H |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
9 |
90H |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
Bảng mã quét led 7 đoạn :
|
Vị trí led |
Số Hex |
Mã nhị phân |
|||||||
|
1 2 3 4 5 6 7 8
|
FEH FDH FBH F7H EFH DFH BFH 7FH |
1 1 1 1 1 1 1 0 |
1 1 1 1 1 1 0 1
|
1 1 1 1 1 0 1 1
|
1 1 1 1 0 1 1 1
|
1 1 1 0 1 1 1 1
|
1 1 0 1 1 1 1 1 |
1 0 1 1 1 1 1 1 |
0 1 1 1 1 1 1 1
|
3.Giải mã bằng phần mềm :
Người lập trình có thể viết các byte lệnh và xuất trực tiếp các byte ra port bên ngoài ,và led 7 đoạn được giao tiếp với port .
- Hạn dòng cho led
Như đã nêu trên dòng tối thiểu cho một led sáng là 3mA .Tại mỗi thời điểm chỉ có một led sáng trên một hàng
VII. MA TRẬN LED :
1.Cấu tạo :
H0
H1
H2
H3
H4
H5
H6
H7
C0 C1 C2 C3 C4 C5 C6 C7
CHƯƠNG KẾT LUẬN
******
I. ỨNG DỤNG:
Mô hình có thể được ứng dụng rộng rải trong nhiều lĩnh vực,đặc biệt là trong các phân xưởng sản xuất .Nó có thể tự động vận chuyển hàng hoá đến các nơi cần đến như: kho hàng , các bộ phận khác … .Nó có thể thay thế nhiều công nhân lao động trong việc vận chuyển hàng .Giảm nhẹ được sức lao động ,hạ thấp chi phí cho quá trình sản xuất .Do đó khả năng ứng dụng vào thực tế là rất lớn.
II. ƯU ĐIỂM :
- Mạch có sơ đồ nguyên lý đơn giản ,dễ hiểu ,dễ thi công .
- Có thể tự động vận hành mà không cần con người trực tiếp điều khiển .
- Có thể ứng dụng rộng rải trong nhiều lĩnh vực đặc biệt là trong sản xuất.
- Chương trình phần mềm đơn giản .
III.KHUYẾT ĐIỂM :
- Muốn thay đổi đích đến cần phải thay đổi vạch đường hoặc phần mềm.
- Mô hình làm việc còn chậm ,còn có sai sót.
- Phần cơ khó chế tạo.
III. THUẬN LỢI VÀ KHÓ KHĂN TRONG THI CÔNG :
1. Thuận lợi :
- Các linh kiện đơn giản , dễ tìm .
- Việc thiết kế mạch tương đối đơn giản .
2. Khó khăn :
- Thời gian thi công ngắn , thiếu công cụ.
- Các cảm biến giá khá đắt ,độ nhạy chưa cao .
- Thiếu tài liệu tham khảo về các cảm biến.
- Vì không đủ tiền và thời gian nên nhóm em chưa thiết kế được bộ phận nhận biết có hàng .
TÀI LIỆU THAM KHẢO
***********
- Giáo trình LINH KIỆN ĐIỆN TỬ VÀ ỨNG DỤNG của TS. Nguyễn Phước Nguyên
- Họ vi điều khiển 8051 của Tống Văn On và Hoàng Đức Hải
- Giáo trình CẢM BIẾN của Phan Quốc Phô và Nguyễn Đức Chiến
- Tài liệu thực hành VI MẠCH của Nguyễn Đình Phú











