THIẾT KẾ ROBOCON 2014 điều khiển TỰ ĐỘNG qua máy tính đường truyền Bluetooth










NỘI DUNG ĐỒ ÁN
THIẾT KẾ ROBOCON 2014 điều khiển TỰ ĐỘNG qua máy tính đường truyền Bluetooth
Trên con đường tiến tới công nghiệp hóa, hiện đại hóa đất nước thì nước ta phải phát triển các ngành khoa học kỹ thuật như: công nghệ thông tin, công nghệ cơ khí, kỹ thuật điện tử, công nghệ CNC, thủy lực, khí nén… Bên cạnh đó xã hội hiện nay ngày càng phát triển, đòi hỏi nguồn nhân lực chuyên môn ngày càng cao. Do đó trong ngành kỹ thuật, cần phải có những thiết bị, máy công cụ chính xác đồng thời giảm sức lao động của con người.
Mỗi ngành như: cơ khí, điện tử, tin học đều có nền tảng khoa học vững chắc và tạo ra các sản phẩm đặc trưng riêng. Tuy nhiên, yêu cầu của thời đại đặt ra yêu cầu cao hơn về cách hoạt động của máy móc, yêu cầu máy móc cần phải gọn nhẹ hơn, linh động hơn, uyển chuyển hơn và thông minh hơn. Các kỹ sư cơ khí không thể làm máy móc thông minh hơn, trong khi những kỹ sư tin học có thể tạo ra trí thông minh nhân tạo nhưng họ không biết về cơ khí, những kỹ sư điện tử có thể kết nối và điều khiển tín hiệu, nhưng họ không thể kết nối giữa trí thông minh nhân tạo để điều khiển thiết bị cơ khí. Chính yêu cầu này đã hình thành nên ngành Cơ điện tử để tạo ra sản phẩm mới đáp ứng các yêu cầu đặt ra trên cơ sở phối hợp nền tảng sẵn có của các ngành với nhau.
Với khả năng am hiểu về cơ khí, điện tử, tin học, và các công nghệ hiện đại... người kỹ sư cơ điện tử đưa vào các sản phẩm cơ khí hệ thống điều khiển linh hoạt bằng điện tử, và thông qua hệ thống điện tử, kết nối với hệ thống xử lý thông tin - trí thông minh nhân tạo để tạo ra một sản phẩm hoàn chỉnh.
Do có sự hạn chế về thời gian cũng như kiến thức và kinh nghiệm nên đề tài nhóm chúng em nghiên cứu không tránh khỏi những sai sót. Rất mong được sự chấp nhận và sự đóng góp ý kiến của quý thầy cô và các bạn về đề tài này, để chúng em cũng cố lại kiến thức và rút kinh nghiệm trước khi ra trường

DANH MỤC HÌNH VẼ BÁO CÁO
Hình 1.1: Sân thi đấu.
Hình 2.1:Chiến thuật thi đấu.
Hình 2.2 :Vật liệu nhôm.
Hình 2.3: vật liệu cố định mối ghép .
Hình 2.4: Xi lanh kẹp và xi lanh thường hành trình 50 mm.
Hình 2.5: Phip, nhôm tấm.
Hình 2.6: Bánh gang và bánh omni.
Hình 2.7: Buly, dây đai PU.
Hình 1.8: ống gió, push-fitting, solenoid.
Hình 2.9: Khung xe cơ bản.
Hình 2.10: Khung sườn hoàn chỉnh.
Hình 2.11: Lắp ráp bánh chủ động, bánh omni.
Hinh 2.12: Khung xe.
Hình 2.13: Góc cánh tay.
Hình 2.14: Hình chiếu cạnh cánh tay.
Hình 2.15: Tấm ốp tay gắp chính.
Hình 2.16: Tay gắp hoàn chỉnh.
Hình 2.17: Tay gắp thực tế.
Hinh 2.18: Cơ cấu trượt.
Hình 2.19: Ổ bi ngàm.
Hình 2.20: Mô hình cơ cấu trược.
Hình 2.21: Tay gắp.
Hình 2.22: lắp lên thân trượt.
Hình 2.23: Cơ cấu trượt thực tế.
Hình 2.24: Góc tay phụ đỡ lá.
Hình 2.25: Tấm ốp tay gắp phụ.
Hình 2.26: Nhôm ống.
Hình 2.27: Mô hình tay gắp phụ.
Hình 2.28: Tay gắp chính và phụ thực tế.
Hình 2.29: Tay đòn tay gắp mầm.
Hình 2.30: Cơ cấu trượt.
Hình 2.31: Tay gắp mầm.
Hình 2.32:Cơ cấu xoay.
Hình 2.33: Tay gắp mầm thực tế.
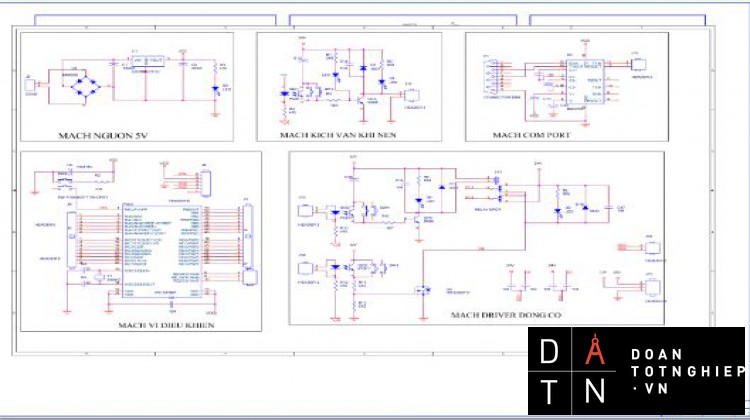
Hình 2.34: Tổng quát mạch điện.
Hình 2.35: Sơ mạch điên tổng quát.
Hình 2.36: Khung truyền dữ liệu UART.
Hình 2.37: Tín hiệu xung encoder ở chế độ x4.
Hình 2.38: Tín hiệu xung encoder ở chê độ x2.
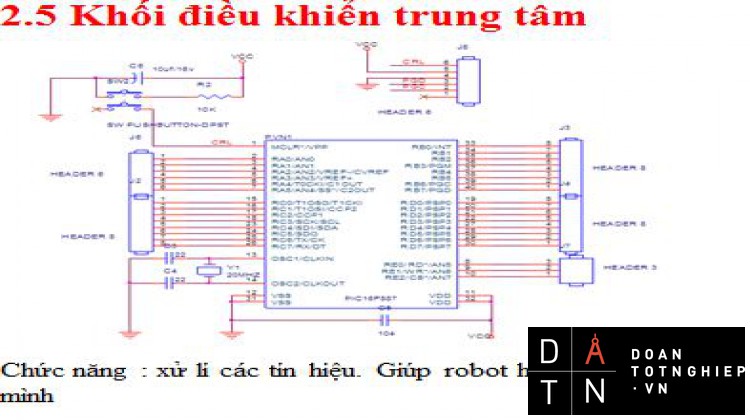
Hình 2.39: Module điều khiển trung tâm thực tế.
Hình 2.40: Module điều khiển trung tâm.
Hình 2.41 :Modun pic1.
Hình 2.42 :khối led hiển thị trạng thái.
Hình 2.43: khối nút nhấn.
Hình 2.44: Modun pic 2.
Hình 2.45: khối treo trở công tắc hành trình.
Hình 2.46: Công tắt hành trình.
Hình 2.47: Mạch nguồn nguyên lý.
Hình 2.48: Sơ đồ khối LM2676.
Hình 2.49 : LM2576.
Hình 2.50 :Điện trở.
Hình 2.51: Diode xung 2N5822.
Hình 2.52: Cuộn cảm
Hình 2.53: Tụ hóa.
Hình 2.54: Bình ắc quy 12V_7.2h.
Hình 2.55: Mạch công suất thực tế.
Hình 2.56: Mạch công suất nguyên lý.
Hình 2.57: Opto PC817.
Hình 2.58: IRF3205.
Hình 2.59: Transistor D468.
Hình 2.60: Diode 4007.
Hình 2.61: Tụ sứ.
Hình 2.62: Nút nhấn.
Hình 2.63: Relay 12V_24V.
Hình 2.64: Mạch kính van khí nén.
Hình 2.65: Modul HC – 05 sử dụng 3.3V
Hình 2.66: Mạch nguyên lý modul HC – 05 sử dụng 3.3V.
Hình 2.67: Modul HC-05 sử dụng nguồn 5V.
Hình 2.68: Mạch nguyên lý modul HC – 05 sử dụng 5V.
Hình 2.69: Mạch nguyên lý cảm biến line.
Hình 2.70: Quang trở.
Hình 2.71: Mạch chọn encoder.
Hình 2.72: Đĩa encoder tuyệt đối.
Hình 2.73: Đĩa encoder tương đối.
Hình 2.74: Minh họa nguyên lý cơ bản của hoạt động encoder.
Hình 2.75: Sơ đồ khối hệ thống điều khiển.
MỤC LỤC
Lời mở đầu: Trang
Chương 1: Giới thiệu Đề tài 1
1.1 Sơ lược về luật thi đấu ROBOCON2013: 1
1.2 Hướng ứng dụng của đề tài: Error! Bookmark not defined.
Chương 2: Thiết kế và Thi công. 3
2.1 Cơ khí: 3
2.1.1 Chuẩn bị ý tưởng thiết kế robot: 3
2.1.1.1 Khó khăn: 3
2.1.1.2 Khắc phục: 3
2.1.2. Ý tưởng thiết kế: 3
2.1.2.1 Cơ cấu: 3
2.1.2.2 Chiến thuật thi đấu: 3
2.1.3 Vật liệu chế tạo robot: 4
2.1.4 Chế tạo Robot: 8
2.1.4.1 Giai đoạn 1: Chế tạo phần khung chính của robot. 8
2.1.4.2 Giai đoạn 2: Gắn trụ trượt, động cơ, bánh xe lên khung xe. 9
2.1.4.3 Giai đoạn 3: Chế tạo cách tay lớn và cơ cấu trượt. 11
v Cánh tay lớn: 11
v Cơ cấu trượt : 13
2.1.4.4 Giai đoạn 4: Cánh tay phụ đỡ lá: 16
2.1.4.5 Giai đoạn 5: Cánh tay nhỏ. 19
2.2 Điện tử: 21
2.2.1 Tổng quát mạch điện: 21
2.2.2 Sơ lược về VĐK dspic30f4011: 22
2.2.2.1 Giao tiếp UART: 23
2.2.2.2 Bộ chuyển đổi ADC: 24
2.2.2.2 Bộ nhớ EEPROM: 24
2.2.2.4 Modul QEI (Quadrature Encoder Interface): 24
2.2.2.5 Output Compare Modul 25
2.2.3 Khối điều khiển trung tâm: 26
1. Sơ đồ mạch điện Modun PIC 1:. 28
2. Sơ đồ mạch điện Modun Pic 2:. 31
2.2.4. Sơ đồ mạch nguồn: 33
2.2.5 Mạch công suất: 37
2.2.5.1 Mạch thực tế: 37
2.2.5.2 Mạch nguyên lý: 38
2.2.5.3 Giải thích mạch: 38
2.2.5.4 Nguyên lí hoạt động: 42
2.2.5.5 Lý thuyết tính toán. 42
2.2.6 Mạch kích van khí nén: 44
2.2.7 Bộ thu phát Bluetooth HC-05: 45
2.2.7.1 Sơ lược về bluetooth: 45
2.2.7.2 Giới thiệu Bluetooth HC-05: 45
2.2.8 Mạch dò line đọc ADC: 49
2.2.9 Mạch đoc 2 encoder: 50
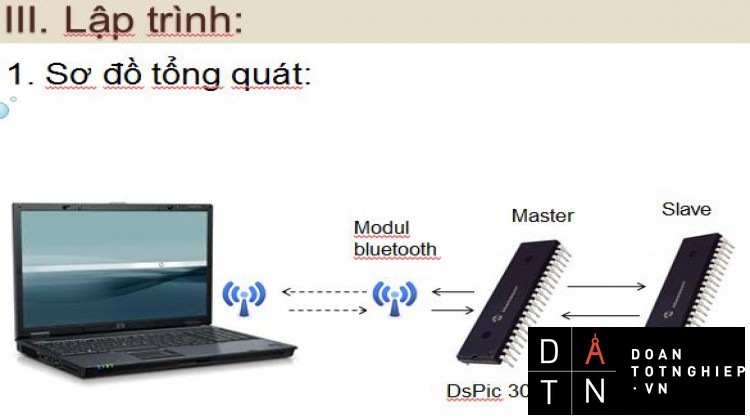
2.3 Lập trình và điều khiển: 53
2.3.1 Sơ đồ khối của hệ thống điều khiển: 53
2.3.2 Các quy ước và định nghĩa: 53
2.3.3 Điều khiển không giao tiếp máy tính: 55
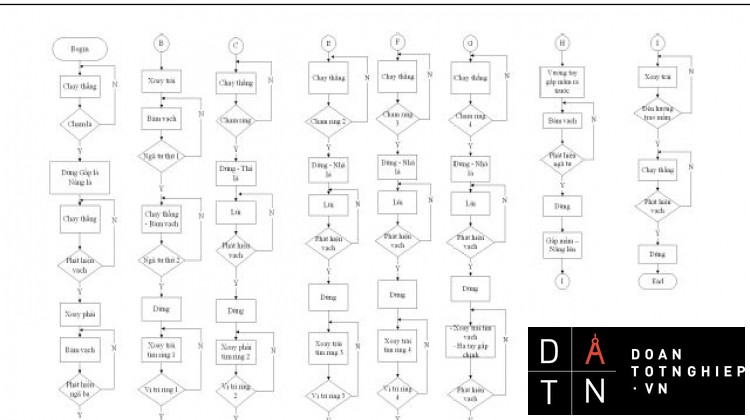
2.3.3.1 Giải thuật điều khiển chung: 55
2.3.3.2 Giải thuật điều khiển giữa Master và Slaver: 58
2.3.3.3 Giải thuật lấy mẫu cho cảm biến line: 61
2.3.3.4 Giải thuật đọc cảm biến line: 62
2.3.3.5 Giải thuật bám line: 63
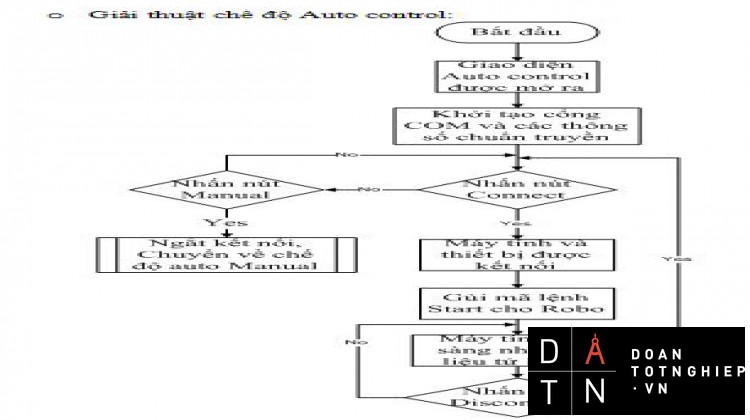
2.3.4 Điều khiển qua máy tính: 64
2.3.4.1 Giới thiệu giao diện Visual Basic: 64
2.3.4.2 Lưu đồ giải thuật: 66
Chương 3: Kết quả Và Hướng Phát triển. 70
3.1 Kết quả: 70
3.1.1 Đạt được: 70
3.1.2 Chưa đạt được: 70
3.2 Hướng phát triển và khả năng ứng dụng của đề tài: 70
3.2.1 Hướng phát triển: 70
3.2.2 Khả năng ứng dụng: 70
DANH MỤC TÀI LIỆU THAM KHẢO.. 72
Chương 1: Giới thiệu Đề tài
- Sơ lược về luật thi đấu ROBOCON2013:
- Thời gian thi đấu mỗi trận là 3 phút.
- Mỗi đội có 2 Robot
- 01 Robot tự động.
- 01 Robot điều khiển bằng tay.
- Robot bằng tay lấy lá ở kho, đem gắn vào 3 các ô trống (Ring) tại bán cầu Nam.
- Tiếp theo, Robot bằng tay đi lấy lá ở kho chuyển cho Robot tự động. .
- Robot tự động đi gắn tối thiểu 3 lá ở vùng bán cầu Bắc (bao gồm lá ở phần sân đội mình và lá ở vùng chung). Sau đó, Robot tự động mới được phép chạm vào mầm đặt ở cực Bắc.
- Robot tự động đi lấy mầm (Các đội tự làm mầm này) của đội mình đặt ở vùng cực Bắc chuyển cho Robot bằng tay.
- Robot bằng tay đứng dưới đường giới hạn 2 và ném các mầm vào vùng mặt trăng. Nếu mầm của đội nào đứng trên vùng mặt trăng trước đội đó giành chiến thắng tuyệt đối.
- Sân thi đấu ( Xem hình 1.1):
- Sân thi đấu được làm bằng gỗ dán, dày tối thiểu 18 mm, mặt trên sơn không bóng, được bao quanh bởi tường rào bằng sắt, cao 100 mm, rộng tối thiểu 30 mm.
- Sân thi đấu có kích thước 13000mm x 13000mm, sân bao gồm 3 phần :
- Vùng trái đất (hình quả địa cầu) có đường kính 8500mm, có đường dẫn trắng (rộng 3 cm),biểu trưng cho đường kinh tuyến và vĩ tuyến.
- Vùng mặt trăng là đĩa tròn đường kính 500mm, đặt trên một trụ sắt cao 1500mm.
- Vùng không gian là vùng bao quanh Trái đất :
Hình 1.1: Sân thi đấu.
Chương 2: Thiết kế và Thi công
2.1 Cơ khí:
2.1.1 Chuẩn bị ý tưởng thiết kế robot:
2.1.1.1 Khó khăn:
- Chưa có kinh nghiệm trong việc chế tạo robot.
- Kinh phí làm robot và sân thi đấu rất lớn.
- Phải lựa chọn ra 1 phương án thiết kế tối ưu nhất để tránh phải làm lại cơ cấu.
2.1.1.2 Khắc phục:
- Tham khảo các cơ cấu robot của các trường đã thi robocon các năm trước.
- Lên các diễn đàn về robot để thu thập thông tin và học hỏi cách chế tạo.
- Xin ý kiến các thầy cô về ý tưởng thiết kế đã đề ra và cách chọn vật liệu để chế tạo.
2.1.2. Ý tưởng thiết kế:
2.1.2.1 Cơ cấu:
- Kích thước robot sẽ thiết là 700x700x800(mm) phù hợp với yêu cầu của đề.
- Robot sẽ có 3 cách tay 1 cánh tay chính,1 tay gắp mầm,1 tay đỡ lá
- Cách tay lớn :Có nhiệm vụ thả 4 lá vào 4 ô bên phần sân của đội mình. Trên cánh tay chính sẽ có thêm 1 cơ cấu phụ giúp dữ 4 phôi có độ cao 80cm để khi robot di chuyển phôi không bị đổ.
- Cách tay nhỏ: Có nhiệm vụ thả 1 lá còn lại vào phần sân của đối phương và gắp mầm cây để đưa cho robot bằng tay bắn lên mặt trăng.
2.1.2.2 Chiến thuật thi đấu:
Robot xuất phát từ ô đỏ lấy lá và di chuyển theo mũi tên màu đỏ, thả lá vào ô tròn 1 trước sau đó tới các ô 2,3,4.
Sau khi đã thả xong lá ở ô tròn 4 robot di chuyển theo mũi tên màu đen lấy mầm cây và đưa cho robot bằng tay bắn lên mặt trăng. Hình 2.1
Hình 2.1:Chiến thuật thi đấu.
2.1.3 Vật liệu chế tạo robot:
- Vật liệu làm khung xe và các cơ cấu là nhôm định hình,nhôm hộp và nhôm ống..
Hình 2.2 :Vật liệu nhôm.
Ưu điểm:
- Nhẹ và cứng với đủ các loại kích thước phù hợp với cơ cấu thiết kế.
- Dễ dàng thi công,chế tạo với các cộng cụ bằng tay.
- Các mối ghép được cố định bằng rive,bulong,thanh nhôm chữ V.
Hình 2.3: vật liệu cố định mối ghép .
Ưu điểm:
Dễ dàng sử dụng dễ dàng tháo lắp khi có sai sót hoặc thay đổi kết cấu khác.
- Cơ cấu kẹp của 2 cách tay sử dụng xi lanh khí nén tác động 2 phía .
Hình 2.4: Xi lanh kẹp và xi lanh thường hành trình 50 mm.
- Các kết cấu dạng tấm sử dụng vật liệu Phip,nhôm.
Hình 2.5: Phip, nhôm tấm.
Ưu điểm:
- Nhẹ, dễ dàng gia công.
- Có nhiều kích thước độ dày khác nhau phù hợp cho việc chế tạo robot.
- Động cơ chính:
Tính toán chọn động cơ
Công suất tải:
Công suất cần thiết:
Trong đó:
Nt : Công suất tải của động cơ chính.
Nct : Công suất cần thiết.
. η = η1 (η2 )3 = 0.97 0.993 = 0.94
Trong đó : η : Hiệu suất bộ truyền.
η = 0,97 – Giả sử
η = 0,99 – hiệu suất của một cặp ổ lăn.
Cần phải chọn động cơ có công suất lớn hơn công suất cần thiết:
Nđc>=Nct=64W
- Sử dụng bánh nhôm làm bánh chủ động,bánh dẫn hướng là bánh omni.
- Bánh nhôm: Khối lượng 210g, tải trọng 50 kg, đường kính ngoài 100mm, bề rộng 35mm, bánh xe đúc bằng nhôm có độ bền cao, vỏ được bọc silicon mềm có độ bám cao.
- Bánh omni: Sườn bánh làm bằng nhựa PA, có 8 bánh vệ tinh, tải trọng 10 kg, đường kính ngoài 40mm, dày 25mm, đường kính trục 8mm.
Hình 2.6: Bánh nhôm và bánh omni.
- Sử dụng buly và dây đai nhựa PU để truyền động từ động cơ tới bánh xe.
- Buly: Được làm từ nhôm hợp kim bền, độ cứng cao.Khối lượng 10g, đường kính rãnh buli 13mm, gồm hai rãnh lắp dây curoa làm giảm độ trượt curoa tối đa, đường kính ngoài 22mm, đường kính lỗ 10mm.
- Dây dai nhựa PU dùng nhiều trong các loại máy công nghiệp, rất dai và độ bền cao, từ sợi curoa dài có thể cắt ra thành những sợi dây kích thước theo nhu cầu sau đó dùng lửa để nối lại rất đơn giản.
Hình 2.7: Buly, dây đai PU.
- Sử dụng dây khí nén loại 4-6mm cấp cho các xilanh và solenoid, các đầu push-fitting để nối ống,dùng solenoid tác động điện để điều khiển xilanh.
Hình 1.8: ống gió, push-fitting, solenoid SMC.
2.1.4 Chế tạo Robot:
2.1.4.1 Giai đoạn 1: Chế tạo phần khung chính của robot.
Phần thân chính là phần quan trọng nhất của robot. Có nhiệm vụ giúp robot di chuyển linh hoạt và đỡ toàn bộ trọng lượng của các cơ cấu bên trên, kích thước 600x600mm.
Yêu cầu: Đảm bảo độ cứng bền và phải nhẹ để cho robot có thể di chuyển linh hoạt.
Phương án chế tạo: Sử dụng nhôm định hình làm vật liệu chính các mối ghép sử dụng thanh nhôm chữ L dày 3mm và cố định bằng Rive.
Hình 2.9: Khung xe cơ bản.
- Giai đoạn 2: Gắn trụ trượt, động cơ, bánh xe lên khung xe.
Phần trụ trượt rất quan trọng để giúp tay có thể di chuyển lên xuống linh hoạt,tay kết nối với cánh tay nhờ 8 ổ bi ngàm.
- Yêu cầu: Phải đảm bảo độ cứng vững để có thể đỡ được trọng lượng cánh tay và đảm bảo ma sát trươt là nhỏ nhất.
- Bánh xe chủ động là bánh nhôm có đường kính 100mm bánh được bọc bằng cao su để tạo ma sát khi di chuyển. Bánh xe phụ là bánh omni giúp xe có thể đi chuyển được nhiều hướng linh hoạt.Truyền động giữa bánh xe và buly là dây đai nhựa PU tròn có đường kính 5mm. Tỷ số truyền là i=D1/D2=1/6.
- Chế tạo: Trụ trượt cho cánh tay sử dụng nhôm hộp kích thước 50x50x600mm dày 1mm, rất cứng và nhẹ, động cơ được bắt vào thanh nhôm chữ V dày 5mm, đảm bảo cho động cơ không bị lắc khi robot chạy.
- Mô hình thiết kế:
Hình 2.10: Khung sườn hoàn chỉnh.
- Các chi tiết lắp ráp:
Hình 2.11: Lắp ráp bánh chủ động, bánh omni.
- Mô hình thực tế:
Hinh 2.12: Khung xe.
2.1.4.3 Giai đoạn 3: Chế tạo cách tay lớn và cơ cấu trượt.
- Cánh tay lớn:
Cách tay lớn có nhiệm vụ lấy lá và thả lá vào các ô tròn, theo đề thi.
- Yêu cầu: Thiết kế phải cứng vững xi lanh phải có lực ép đủ lớn để có thể giữ được trọng lượng lớn hơn trọng lượng của 4 lá 800g
- Công thức chọn đường kính xi lanh D = sgrt((F*4)/(P*pi))
F là tải trọng đơn vị là Kg P là áp suất khí, Pi=3,14
- Chế tạo: Tay gắp sử dụng 2 đoạn nhôm hộp lại 10x20mm, đoạn ngắn là 60mm, đoạn dài là 160mm,hai đoạn ghép thành 1 thanh hình chữ V với góc là 150.
Hình 2.13: Góc cánh tay.
...................................................................
Chương 3: Kết quả Và Hướng Phát triển
3.1 Kết quả:
3.1.1 Đạt được:
- Nghiên cứu Dspic30f4011.
- Đọc encoder bằng chức năng QEI của Dspic30f4011, phối hợp với dò vạch để tìm đường đi cho Robot.
- Có các cơ cấu gấp khí nén nhanh, chính xác.
- Dò vạch bằng cách đọc ADC, robot có thể dò vạch linh hoạt hơn, chi cần vài giây lấy mẫu sân lưu vào EEPROM là 3có thể dò vạch.
- Robot có thể chạy tự động theo đề tài Robocon2013 trong thời gian 51 giây.
- Có các chế độ điều khiển qua máy tính (Manual và Auto) thông qua đường truyền Bluetooth 2.0.
3.1.2 Chưa đạt được:
- Robot đang sẵn sàng với vùng sân màu xanh, nhưng chưa chạy trên vùng sân đỏ do không đủ điều kiện làm sân đúng kích thước.
- Tốc độ của Robot chưa nhanh lắm, chưa chạy hết công suất động cơ.
3.2 Hướng phát triển và khả năng ứng dụng của đề tài:
3.2.1 Hướng phát triển:
- Sau khi có vùng sân màu đỏ thì sẽ thay đổi thông số của chương trình sân xanh thành chương trình sân đỏ. Sau đó cho chạy thử và chỉnh thông số lần nữa vì mỗi động cơ có mômen đáp ứng khác nhau.
- Có thể ứng dụng thêm công nghệ xử lý ảnh nhằm tăng độ chính xác và có thể cải thiện tốc độ của Robot.
3.2.2 Khả năng ứng dụng:
Với đề tài này chúng ta có thể sử dụng các chức năng vào ứng dụng công nghiệp như:
- Truyền dữ liệu không dây về máy tính.
- Robot tự hành động, di chuyển, thao tác theo quy trình lập sẵn.
- Điều khiển Robot bằng máy tinh để Robot làm việc trong môi trường độc hại, nặng nhọc, hạn chế con người.







