LUẬN VĂN NGHIÊN CỨU GIẢI THUẬT ỔN ĐỊNH ĐỘ CAO CỦA ROBOT
NỘI DUNG ĐỒ ÁN
LUẬN VĂN THẠC SĨ
NGHIÊN CỨU GIẢI THUẬT ỔN ĐỊNH ĐỘ CAO CỦA ROBOT
- TÊN ĐỀ TÀI: NGHIÊN CỨU GIẢI THUẬT ỔN ĐỊNH ĐỘ CAO ROBOT................
......................................................................................................................................................... ..
- NHIỆM VỤ VÀ NỘI DUNG: ............................................................................................. ..
Tính toán động học cho chân Robot............................................................................................
Giải thuật ổn định cao độ mặt thân robot khi robot di chuyển trên mặt ngang, và đi lên dốc.
- NGÀY GIAO NHIỆM VỤ :..............................................................................................
NGÀY HOÀN THÀNH NHIỆM VỤ:
TÓM TẮT LUẬN VĂN
Đề tài “Nghiên cứu giải thuật ổn định độ cao của robot ” bao gồm 6 chương, với các phần chính sau đây:
- Tìm hiểu tổng quan về robot di chuyển bằng chân.
- Tìm hiểu về các tiêu chuẩn ổn định của robot bước đi.
- Tìm hiểu dáng đi của robot dùng chân.
- Bài toán động học của chân robot.
- Giải thuật điều khiển robot để ổn định độ cao.
- Hoạch định dáng đi và mô phỏng di chuyển của robot.
Mục đích của luận văn là tìm hiểu về giải thuật để ổn định độ cao mặt phẳng của thân robot, đảm bảo mặt này song song với mặt đất (vuông góc với hướng của trọng lực). Ta sẽ nghiên cứu giải thuật, sau đó mô phỏng giải thuật bằng phần mềm.
MỤC LỤC
NHIỆM VỤ LUẬN VĂN THẠC SĨ. ii
LỜI CẢM ƠN.. iii
TÓM TẮT LUẬN VĂN.. iv
MỤC LỤC.. v
DANH SÁCH HÌNH ẢNH.. vii
DANH SÁCH BẢNG BIỂU.. ix
Chương 1: TỔNG QUAN ĐỀ TÀI. 1
1.1. Giới thiệu về robot:. 1
1.2. Giới thiệu robot di chuyển bằng chân:. 4
1.3. Lịch sử hình thành và một số cột mốc của robot bốn chân:. 5
1.4. Ưu điểm của hệ thống Robot di chuyển bằng chân:. 11
1.5. Nhược điểm của hệ thống robot di chuyển bằng chân:. 14
1.6. Mục tiêu của luận văn:. 16
1.7. Nội dung của luận văn:. 16
Chương 2: TIÊU CHUẨN ĐÁNH GIÁ SỰ ỔN ĐỊNH CỦA ROBOT.. 18
2.1. Giới thiệu:. 18
2.2. Tiêu chuẩn đánh giá sự ổn định:. 19
2.2.1. Tiêu chuẩn cân bằng động học:19
2.2.2. Tiêu chuẩn cân bằng năng lượng:21
2.2.3. Tiêu chuẩn cân bằng động lực học:23
Chương 3: DÁNG ĐI CỦA ROBOT BƯỚC.. 29
3.1. Khái niệm:. 29
3.1.1. Giới thiệu dáng đi:29
3.1.2. Một số khái niệm:31
3.2. Dáng đi liên tục (Continous Gait):. 33
3.3. Dáng đi không liên tục (Discontinous Gaits):. 34
3.3.1. Dáng đi không liên tục 2phase:34
3.3.2. Dáng di chuyển không liên tục 4phase:40
3.3.3. Dáng đi nghiêng không liên tục 2phase. 40
3.3.4. Dáng xoay không liên tục:44
3.4. Dáng đi không theo chu kỳ:. 44
Chương 4: ĐỘNG HỌC ROBOT.. 46
4.1. Giới thiệu chung:. 46
4.1.1. Động học thuận:46
4.1.2. Động học ngược:50
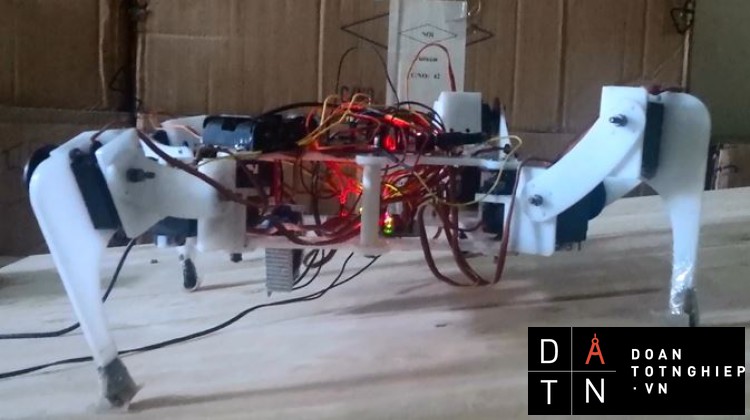
4.2. Giới thiệu robot thực nghiệm:. 50
4.3. Tính toán động học cho robot:. 52
Chương 5: GIẢI THUẬT ĐIỀU KHIỂN ROBOT.57
5.1. Giới thiệu giải thuật điều khiển robot:. 57
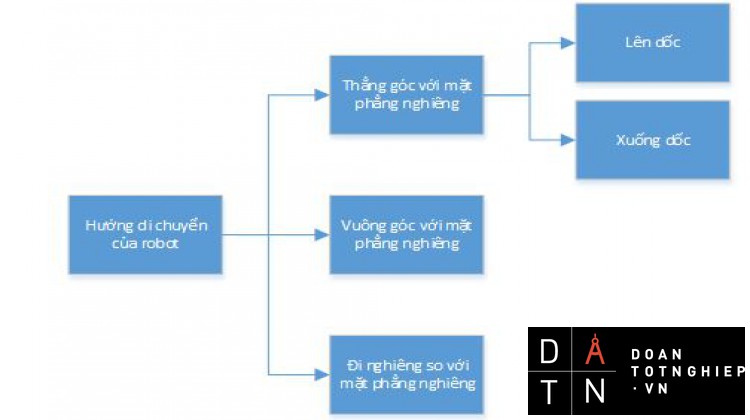
5.2. Giải thuật điều khiển robot để ổn định độ cao mặt phẳng trên của robot:. 59
5.2.1. Hướng robot di chuyển thẳng góc với mặt phẳng nghiêng:61
5.2.2. Trường hợp Robot di chuyển song song với góc mặt nghiêng:66
5.2.3. Trường hợp robot di chuyển theo phương xiên với mặt nghiêng:67
5.3. Mô phỏng dáng đi của robot:. 69
Chương 6: KẾT LUẬN.. 75
6.1. Đánh giá:. 75
6.2. Hướng phát triển của đề tài:. 75
TÀI LIỆU THAM KHẢO.. 76
PHỤ LỤC.. 77
DANH SÁCH HÌNH ẢNH
CHƯƠNG 1
Hình 1. 1. Robot có gốc cố định. 1
Hình 1. 2. Robot di chuyển bằng bánh xe. 3
Hình 1. 3. Metallic Tank (Tracked robot). 3
Hình 1. 4. Hexapods (Legged robot). 3
Hình 1. 5. Robot của Chebyshev. 6
Hình 1. 6. Nguyên lý của cơ cấu bốn thanh. 7
Hình 1. 7. Con Ngựa cơ khí (“The Mechanical Hourse”). 8
Hình 1. 8. General Electric Quadruped. 9
Hình 1. 9. Robot Phoney Pony. 10
Hình 1. 10. Robot SCOUT-I10
Hình 1. 11. Robot SCOUT-II11
CHƯƠNG 2
Hình 2. 1. Tiêu chuẩn cân bằng robot20
Hình 2. 2. Tiêu chuẩn cân bằng năng lượng. 21
Hình 2. 3. Lực tác động lên robot và cơ cấu tác động. 24
Hình 2. 4. Phân tích lực trong tiêu chuẩn cân bằng lực- góc. 26
Hình 2. 5. Phân tích lực trong giới cân bằng động lực học tiêu chuẩn. 28
CHƯƠNG 3
Hình 3. 1. Chuỗi di chuyển chân của robot bốn chân. 29
Hình 3. 2. khái niệm vùng hoạt động của chân. 31
Hình 3. 3. Thứ tự di chuyển chân ở dáng đi không liên tục. 35
Hình 3. 4. Dáng đi không liên tục 2phase. 36
Hình 3. 5. Giảng đồ thời gian di chuyển của chân và thân ở dáng đi không liên tục. 36
Hình 3. 6. Giảng đồ dáng đi cho dáng đi không liên tục và liên tục với β=7/9. 39
Hình 3. 7. Các trường hợp quỹ đạo (A,B) chân ở dáng đi nghiêng không liên tục. 41
Hình 3. 8. Điểm đặt chân và vùng làm việc ở dáng đi nghiêng không liên tục. 42
Hình 3. 9. Các trường hợp quỹ đạo (C,D) chân ở dáng đi nghiêng không liên tục. 43
CHƯƠNG 4
Hình 4. 1. Chuyển hệ trục tọa độ. 47
Hình 4. 2. Xác định thông số các khâu. 49
Hình 4. 3. Mô hình robot50
Hình 4. 4. Kết cấu chân robot51
Hình 4. 5. Thông số động cơ servo. 51
Hình 4. 6. Mô hình thông số robot52
CHƯƠNG 5
Hình 5. 1. Thứ tự bước đi của robot58
Hình 5. 2. Trường hợp robot chạm dốc. 59
Hình 5. 3. Trường hợp chân gặp dốc nghiên xuống. 60
Hình 5. 4. Trường hợp một chân bước lên dốc nghiêng lên. 61
Hình 5. 5. Di chuyển của thân khi một chân gặp dốc nghiêng lên. 62
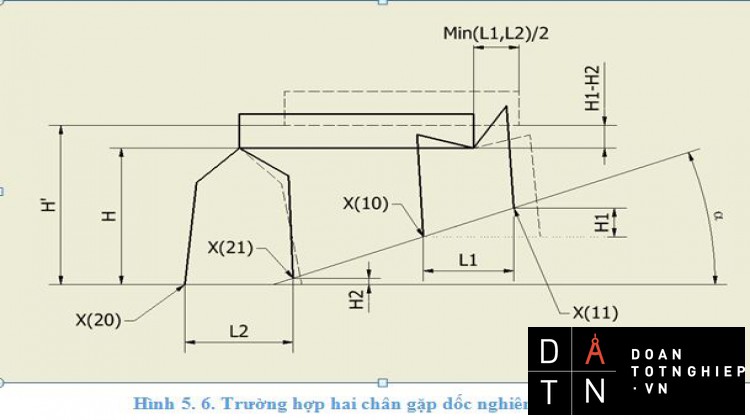
Hình 5. 6. Trường hợp hai chân gặp dốc nghiêng lên. 63
Hình 5. 7. Truòng hợp một chân bước xuống dốc. 64
Hình 5. 8. Thân di chuyển ở trường hợp một chân xuống dốc. 64
Hình 5. 9. Trường hợp hai chân bước xuống dốc nghiêng. 65
Hình 5. 10. Thân di chuyển trong trường hợp hai chân bước xuống dốc. 65
Hình 5. 11. Trường hợp chân hạ xuống tới hạn nhưng chưa chạm đất66
Hình 5. 12. Trường hợp hướng di chuyển của thân song song với mặt nghiêng. 66
Hình 5. 13. Trường hợp robot di chuyển theo hướng xiên với mặt nghiêng. 67
Hình 5. 14. Thông số khi chân bước theo hướng xiên với mặt nghiêng. 68
Hình 5. 15. Robot di chuyển trên mặt phẳng. 69
Hình 5. 16. Tọa độ chân di chuyển trong hệ trục tọa độ. 69
Hình 5. 17. Chân di chuyển theo thời gian. 70
Hình 5. 18. Robot di chuyển lên dốc. 70
Hình 5. 19. Tọa độ của chân trong hệ trục tọa độ. 71
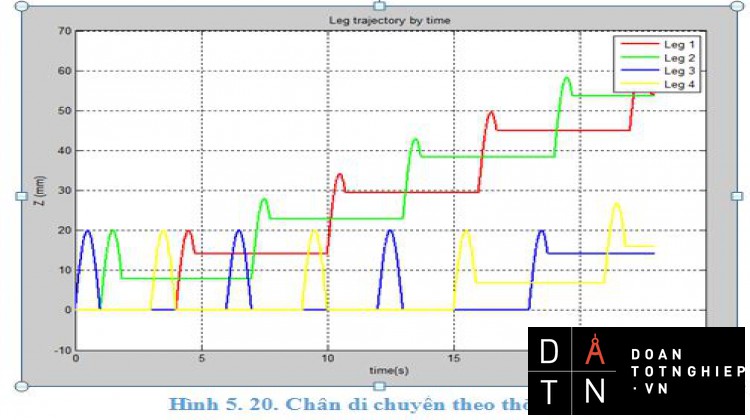
Hình 5. 20. Chân di chuyển theo thời gian. 71
Hình 5. 21. Góc nghiêng của mặt thân theo thời gian. 72
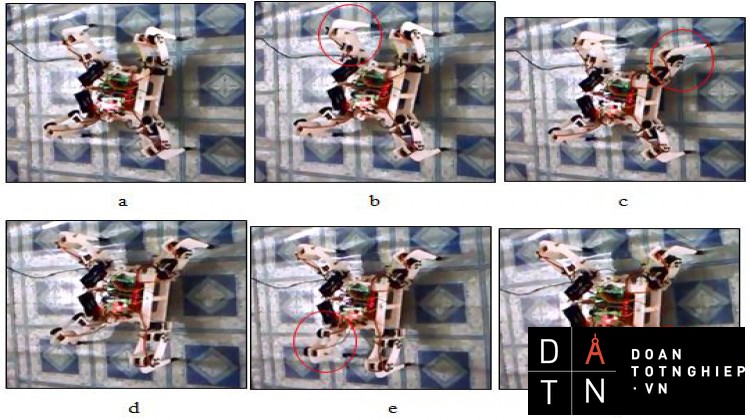
Hình 5. 22. Trình tự bước đi của robot73
Hình 5. 23. Robot di chuyển lên dốc nghiêng. 74
Hình 5. 24. Thân robot khi di chuyển lên dốc nghiêng. 74
DANH SÁCH BẢNG BIỂU
Lưu đồ 5. 1. Quá trình di chuyển của robot57
Lưu đồ 5. 2. Thứ tự các bước di chuyển của robot58
Lưu đồ 5. 3. Các trường hợp robot di chuyển với thân ổn định song song với mặt đất60
Lưu đồ 5. 4. Các trường hợp khi di chuyển gặp mặt nghiêng. 61
Chương 1: TỔNG QUAN ĐỀ TÀI
1.1. Giới thiệu về robot:
Robot là một hệ thống mang tính chất rộng, nó bao gồm nhiều chủng loại với các mức độ khác nhau về kết cấu cơ khí, khả năng tự hành, độ thông minh và khả năng di chuyển. Các robot có thể thu thập dữ liệu, xử lý thông tin, thực hiện chuyển động chấp hành và phản ứng lại với môi trường xunh quanh dựa trên khả năng dự đoán và điều khiển của con người. Robot với mức độ thông minh cao thì phải thể hiện được những tác vụ phức tạp trong khả năng vận hành. Do vậy phải thiết kế ộ điều khiển với mức độ phức tạp cao.
Ngày nay, hệ thống robot được phân loại thành 2 nhóm chính.
o Robot có gốc ở một vị trí cố định (Manipulation robotics):
Robot có gốc cố định lại được chia thành các loại: Articulated (RRR), Spherical (RRP), Scara (RRP), Cylindrical (RPP), Cartesian (PPP)
Hình 1. 1. Robot có gốc cố định
o Robot di động (Mobile robotics):
Robot di động có khả năng tự thực hiện các chuyển động xung quanh môi trường, chúng không ở vị trí cố định. Robot di động có thể phân thành các loại theo tiêu chí di chuyển như sau:
_Robot di chuyển bằng bánh xe (Wheeled robots)
_Robot bám đường (Tracked robots)
_Robot di chuyển bằng chân (Legged robots)
Robot di động có thể tự điều khiển (AMR - autonomous mobile robot) có nghĩa là nó có khả năng điều hướng trong một môi trường không biết trước mà không cần dẫn hướng bằng các thiết bị vật lý hoặc cơ điện. Ngoài ra, robot di động có thể di chuyển dựa vào các thiết bị hướng dẫn cho phép nó di chuyển trong một tuyến đường xác định trước trong không gian được kiểm soát (AGV - autonomous guided vehicle)
Ngày nay, Robot di động đã trở nên phổ biến hơn trong các hoạt động thương mại và công nghiệp. Các kho hàng có thể dùng hệ thống robot di động để di chuyển hiệu quả hàng khỏi các kệ hàng. Robot di động cũng là một lĩnh vực trọng tâm được nghiên cứu tại nhiều trường đại học lớn và nhiều phòng thí nghiệm. Robot di động cũng được ứng dụng nhiều trong công nghiệp, quân sự và cách thiết lập bảo mật. Robot di động còn được ứng dụng trong cuộc sống hằng ngày như: robot hút bụi hoặc làm vườn,…..
Các hệ thống robot di chuyển bằng bánh xe và bám đường rất phổ biến trên thế giới. Robot này có ưu điểm rất lớn khi di chuyển trên địa hình bằng phẳng, tuy nhiên, khi địa hình thay đổi thì vấn đề di chuyển của chúng gặp khó khăn. Trên đường bằng phẳng, chúng đạt tốc độ rất cao so với robot bằng chân. So với các hệ thống di chuyển bằng chân, thì robot bánh xe và robot bám đường có trọng lượng nhẹ hơn, ít phức tạp hơn, đơn giản hơn trong điều khiển.
Hình 1. 2. Robot di chuyển bằng bánh xe
Hình 1. 3. Metallic Tank (Tracked robot)
Hình 1. 4. Hexapods (Legged robot)
1.2. Giới thiệu robot di chuyển bằng chân:
Để phục vụ cho nhu cầu trong cuộc sống, con người đã cố gắng tìm hiểu và mô phỏng theo hoạt động của động vật. Mô phỏng theo hoạt động của các sinh vật là một ý tưởng tuyệt vời nhưng rất khó khăn để thực hiện. Để giải quyết vấn đề trên, con người đã đi theo từng giai đoạn, đầu tiên đó là xây dựng một số tiết bị đơn giản mà có thể phỏng theo giác quan để cảm nhận môi trường xung quanh như: nhìn thấy, ngửi thấy, thao tác, di chuyển,…..
Trên thế giới đã phát triển rất nhiều hệ thống di chuyển bằng chân khác nhau, dựa trên số chân, chúng ta có thể chia thành: hệ thống hai chân (Bipeds robot) giống như con người hoặc chim, Robot bốn chân (Quadrupeds Robot) như động vật có vú, bò sát, Robot sáu chân (Hexapods robot) như côn trùng, và robot 10 chân (Octopods robot) như nhện. Bên cạnh đó, còn có một số loại mô hình robot đặc biệt: robot một chân (Raibert Hopper,1986), robot ba chân (OSU Triped – Berns, 2005), năm chân (Hitachi hybrid Robot – Todd, 1985), tám chân (ReCUS – Ishino,1983), hoặc nhiều chân (Nonaped – Zykov, 2004) [1]. Đề tài này sẽ tập trung đặc biệt vào robot bốn chân và các thuật toán để điều khiển chuyển động của robot theo quỹ đạo mong muốn.
Các tài liệu đầu tiên đề cập đến hệ thống robot di chuyển bằng chân xuất hiện trong khoảng 1870, nó dựa trên cơ cấu bốn thanh được phát minh bởi nhà toán học Nga PL Chebyshev như là một cố thử nghiệm đầu tiên để bắt chước tự nhiên đi bộ (Nghiên cứu của Artobolevsky, 1964) .
Một vài thập kỷ sau đó, vào khoảng năm 1940, các nhà nghiên cứu bắt dầu xem xét khả năng sử dụng robot có chân vào các ứng dụng thực tế. Quân sự là nơi triển khai các ứng dụng đầu tiên. Vương quốc Anh và quân đội Mỹ tài trợ quan trọng trong dự án nghiên cứu các ứng dụng robot có chân để phục vụ chiến tranh. Nhiều hoạt động sau đó đã đưa ra các ứng dụng tiềm năng cho robot có chân dựa trên tính khả thi về mặt lý thuyết.
Việc tạo ra một mô hình robot di chuyển bằng chân rất là hấp dẫn nhưng lại vô cùng phức tạp tại thời điểm đó, các nhà nghiên cứu đã thường xuyên thất bại. Tuy nhiên một số mô hình thú vị đã được thiết kế và xây dựng trong thời gian này. Chìa khóa trong cấn đề này chính là kỹ thuật điện toán. Khi các nhà nghiên cứu đã có thể sử dụng máy tính mạnh và nhỏ gọn trong ngành công nghiệp, số lượng các robot được phát triển tăng lên. Đến giữa những năm 1970, máy tính điều khiển robot di chuyển bằng chân đầu tiên đã được thử nghiệm tại Đại học bang Ohio (OSU). Sau đó, các trường đại học và các trung tâm nghiên cứu Mỹ và Nhật Bản đã bắt đầu thực hiện các nghiên cứu lớn và các hoạt động trong lĩnh vực này. Các robot đi bộ đầu tiên được ghi nhận khoảng năm 1972 tại đại học Rome ở Ý. Tuy nhiên Robot 6 chân phát triển tại viện Vật lý- Kỹ thuật Moscow vào năm 1977 cũng được ghi nhận là robot đi bộ đầu tiên tại châu Âu.
Robot di chuyển bằng chân thể hiện rất nhiều ưu điểm so với các robot kiểu truyền thống khác như bằng bánh xe, xích,… Cộng đồng khoa học đã phát triển số lượng lớn các máy tính để thực hiện nghiên cứu điều khiển robot di chuyển bằng chân. Chỉ có một số ít robot đi bộ được trang vị các tính năng ưu việt: ASV(Song và Waldron, 1989), Dante (Bares và Wettergreen, 1999), và Timberjack (Plustech Oy, 2005),…. mặc dù họ vẫn có khả năng phát triển tốt hơn các robot di chuyển bằng bánh xe, hay robot bám đường ở thời điểm hiện tại. Sự khó khăn về điều kiện khoa học ở các nước làm cho việc chế tạo robot di chuyển bằng chân trở nên rất khó khăn so với dự định, không chỉ về điều kiện máy móc, mà còn về hệ thống điện tử, cảm biến và các thuật toán điều khiển.
1.3. Lịch sử hình thành và một số cột mốc của robot bốn chân:
Robot 4 chân (Quadrupeds hoặc four-legged robots) di chuyển tương tự như một số loại bò sát và động vật có vú. Loài bò sát phát triển sắp xếp chân của chúng rộng và ổn định, phù hợp với môi trường sống của nó. Nhưng nhược điển của bò sát là sự chuyển động xoắn của thân, làm khớp hông chịu toàn bộ khối lượng của cơ thể. Không giống như các loài bò sát, việc bố trí chân của động vật có vú không có nhược điểm trên, nhưng lại khó khăn trong việc kiểm soát sự ổn định.
Kỹ thuật mô phỏng kiểu dáng di chuyển bắt đầu với sự phát triển của một số kết cấu cơ khí di chuyển rất đơn giản. Các nhà khoa học sau đó đã quan sát và ghi lại các các chế độ di chuyển của một số loài vật để hiểu rõ các cơ chế chuyển động trong tự nhiên. Sau đó, kiểu dáng di chuyển được xây dựng lại và nghiên cứu dựa trên các mô hình toán học trong một nỗ lực để cải thiện các giải thuật để đánh giá độ ổn định và hoạch định dáng đi đã được phát triển dựa trên các cơ sở về sinh vật học và những tiến bộ về khoa học kỹ thuật.
Quá trình phát triển của robot di chuyển bằng chân bao gồm các sự kiện quan trọng trong việc hiểu rõ sự tiến hóa cơ chế di chuyển của con người và động vật. Tuy nhiên, chúng ta sẽ tập trung vào các sự kiện quan trọng liên quan đến kết cấu cơ khí và các thuật toán điều khiển chuyển động.
Phần này bao gồm các mốc lịch sử quan trọng nhất trong sự phát triển của robot di chuyển bằng chân. Nó dựa trên những nghiên cứu của Orin (1976), Todd (1985), Raibert (1986), Messuri (1985), và Song-Waldron (1989).
Hình 1. 5. Robot của Chebyshev
- Kết cấu robot di chuyển bằng chân đầu tiên được xây dựng vào những năm 1870 bởi Chebyshev. Nó bao gồm một cơ cấu gồm bốn thanh, được minh họa trong hình 1.5 , trong đó khâu 1 quay quanh trục A1, vuông góc với mặt phẳng tờ giấy, chân (điểm P1) chạy theo một quỹ đạo gần như đường thẳng (T1) tại thời điểm nhất định trong chu kỳ,và nó di chuyển khỏi mặt đất trong phần còn lại của chu kỳ (T2). Quỹ đạo di chuyển và độ thẳng của nó phụ thuộc vào chiều dài các khâu. Với cơ cấu đơn giản như vậy, chúng ta có thể tạo ra 2 bước chuyển động, trong đó 1phase dậm chân (Support) và một phase khua chân (Swing). Với kết cấu các chân được sắp xếp theo cặp đối chéo nhau, nó có thể thực hiện bước di chuyển nhanh với 2phase luân phiên nhau (dậm chân và khua chân). Tuy nhiên, một thiết bị như vậy chỉ có thể di chuyển trên một địa hình hoàn toàn bằng phẳng bởi vì nó không có bất kỳ cơ cấu nào để thích ứng khi địa hình thay đổi (Các chân không di chuyển độc lập với nhau)
Hình 1. 6. Nguyên lý của cơ cấu bốn thanh
- Một cột mốc quan trọng trong lịch sử phát triển của robot có chân là “con ngựa cơ khí”, nó được đăng ký bởi LA Rygg với cục sáng chế của Mỹ trong năm 1893. Người lái dùng chân quay bàn đạp, chuyển động đó sẽ truyền tới chân thông qua kết cấu các khâu và khớp quay, từ đó làm con ngựa dịch chuyển. Thiết kế này được cấp bằng sáng chế vào ngày 14-2-1893. [1]
Hình 1. 7. Con Ngựa cơ khí (“The Mechanical Hourse”)
- Một trong những phương tiện đầu tiên đã có thể áp dụng các dáng đi khác nhau là “General Electric Quadruped”, được phát triển bởi R.Mosher và hoàn thành năm 1968. Nó có chiều cao 3.3m, dài 3m, và trọng lượng 1400kg, gồm có 4 chân, mỗi chân 3 bậc tự do (một ở đầu gối, và hai ở hông), mỗi gối di chuyển thông qua một xylanh thủy lực. Và được cung cấp năng lượng bởi một động cơ đốt trong, công suất 68kW. Việc điều khiển robot phụ thuộc vào người vận hành nắm được các thuộc tính chức năng của cỗ máy. Hoạt động của bộ điều khiển robot bốn chân thong quá bốn cần điều khiển và hệ thống bàn đạp thủy lực kết nối với chân robot bằng phản lực giống của chân người (giống bàn đạp xe hơi) [1,2]. Việc kiểm soát chiếc xe là là sự kiểm soát hệ thống 12 DOF , do con người trực tiếp vận hành, chính vì thế sẽ dẫn đến sự mệt mỏi của người sử dụng sau một thời gian. Từ đó cho thấy sự cần thiết của một bộ điều khiển bằng máy tính chứ không phải trực tiếp của con người . Mặc dù vậy, nhưng nó đã chứng minh khả năng vượt qua chướng ngại vật và có tính di động tốt trong địa hình khó khăn của robot nhiều chân.
Hình 1. 8. General Electric Quadruped
- Một cột mốc của sự phát triển robot nhiều chân là sự ra đời của “Phoney Pony” được phát triển bởi McGhee và Frank. Robot bốn chân này được hoàn thành vào năm 1966, là robot có chân đầu tiên có khả năng di chuyển tự hành dưới sự điều khiển hoàn toàn của máy tính. Mỗi chân có 2 DOF, mỗi khớp là một động cơ, được điều khiển bởi một động cơ điện có hôp giảm tốc (sử dụng nguồn điện bên ngoài). Sự phối hợp giữa các khớp được thực hiện thông qua các biểu thức số đơn giản và thể hiện 2 dáng đi khác nhau. Hạn chế của robot này là nó chỉ di chuyển thẳng, và không rẽ được [1].
Hình 1. 9. Robot Phoney Pony
- Buehler đã sáng tạo ra robot SCOUT-I có bốn chân, mỗi chân chỉ có 1 DOF (đặt ở hông và khởi động bằng các động cơ servo), số cảm biến cần thiết để trang bị cho nó cũng là tối thiểu- chỉ cần 2 cảm biến. có nghĩa là có thể di chuyển thẳng hoặc đường cong và leo lên xuống cầu thang, được kiểm soát bởi bộ điều khiển vòng mở . SCOUT-I có lợi thế hơn những robot nhiều bậc tự do bởi giá thành rẻ hơn nhiều, và điều khiển chuyển động của robot đơn giản hơn[3].
Hình 1. 10. Robot SCOUT-I
Phiên bản cải tiến của robot này là SCOUT-II, được phát triển với mỗi chân 2 DOF, bổ sung thêm khớp trượt và quay. Mỗi chân gồm có phần chân dưới và chân trên kết nối với nhau thông qua một lò xo. Cấu tạo được cải tiến này giúp cho SCOUT-II thực hiện được nhiều dáng di chuyển hơn [4,5]
Hình 1. 11. Robot SCOUT-II
1.4. Ưu điểm của hệ thống Robot di chuyển bằng chân:
- Khả năng di động:
Với các chân thì robot có thể thay đổi hướng di chuyển mà không cần thay đổi hướng của trục chính, không giống như xe di chuyển muốn thay đổi hướng thì phải thay đổi trục chính của thân xe. Robot có chân có thể di chuyển, quay thân của mình bằng cách thay đổi vị trí của chân, điều mà robot di chuyển bằng bánh xe không làm được.
- Vượt chướng ngại vật:
Robot có chân có thể vượt qua chướng ngại vật thấp hơn gầm của robot một tý chỉ bằng một bước chân, trong khi đó robot bánh xe chỉ có thể vượt qua vật có chiều cao nhỏ hơn một nữa đường kính bánh xe. Đối với robot di chuyển bằng bánh xích thì cao hơn, nhưng thân phải di động một khoảng lớn.
- Hệ thống treo:
Khi di chuyển ở các địa hình không bằng phẳng, bằng các thay đổi vị trí các chân thì robot có chân có thể giữ vị trí của thân nằm ngang tuyệt đối, còn đối với robot có bánh xe thì thân phải luôn song song với mặt địa hình.
- Địa hình di chuyển:
Robot sử dụng bánh xe muốn di chuyển tốt thì cần có một địa hình tốt, tương đối bằng phẳng và liên tục. Đối với robot có chân thì không cần thiết, nó có thể di chuyển tốt trên địa hình phức tạp, không bằng phẳng, không liên tục, có thể di chuyển trên cát, bùn lầy, địa hình mềm.
- Khả năng chống trượt và kẹt:
Trên các địa hình mềm, robot sử dụng bánh xe rất dễ bị lún, vì thế rất khó di chuyển. Còn đối với robot có chân, chân của nó thay đổi theo phương đứng nên nó sẽ không tác động đến nền, khi thân đẩy đi, bàn chân xoay quanh các khớp vì thế chân sẽ không tác động lên nền và đó là lý do nó không bị kẹt. Cách di chuyển như vậy cũng sẽ làm robot không bị trượt khi thân di chuyển tới lui.
- Tác động lên địa hình:
Robot có chân khi di chuyển chỉ tạo ra các vêt không liên tục, còn đối với robot bánh xe thì khi di chuyển nó tạo ra các đường liên tục do bánh xe tác động lên nền địa hình.
- Tốc độ di chuyển:
Robot sử dụng bánh xe sẽ đạt tốc độ cao với một địa hình tốt. Tuy nhiên nếu di chuyển trên một địa hình hỗn hợp và phức tạp thì tốc độ trung bình của nó sẽ không cao hơn so với robot có chân.
- Hiệu suất năng lượng:
Các thí nghiệm và nghiên cứu của Hutchinson (1940) và Bekker (1960) đã khẳng định Robot di chuyển bằng chân có hiệu suất sử dụng năng lượng cao hơn so với di chuyển bằng bánh xe và dây xích tải.
1.5. Nhược điểm của hệ thống robot di chuyển bằng chân:
Robot bằng chân không phải là giải pháp chung cho việc di chuyển, cũng có nhiều vấn đề và khó khăn trong việc sử dụng chúng trong ngành công nghiệp và dịch vụ. Vấn đề đầu tiên là sự phức tạp, hệ thống nhiều chân có nhiều phức tạp hơn so với robot bánh xe, không chỉ về kết cấu cơ khí mà còn về thiết bị điều khiển và điện tử.
Vấn đề khác là về tốc độ. Để đảm bảo độ ổn định thì tốc độ của nó rất chậm. Đảm bảo độ ổn định khi di chuyển vẫn đang là bài toán cần tiếp tục được phát triển. và hiện tại thì tốc độ của robot có chân không thể nhanh bằng robot bánh xe.
- Kết cấu cơ khí:
Bánh xe là một kết cấu cực kỳ đơn giản bao gồm một bánh xe và khớp quay. Chân bao gồm một số liên kết và khớp (quay hoặc trượt). Hệ thống này rõ ràng là phức tạp hơn so với một bánh xe đơn giản. Một bánh xe yêu cầu chỉ có một thiết bị truyền động để đẩy nó, và một cơ cấu khác để điều hướng. Việc ổn định xe di chuyển bằng bánh đơn giản nhất là xe ba bánh, bao gồm một bánh xe truyền động và chuyển hướng, hai bánh xe bị động. Hiện nay vẫn có một hệ thống xe 2 bánh tự cân bằng (Tirmant et al, 2002), mặc dù phải có hệ thống cân bằng bởi mô hình con lắc ngược, nhưng nó chỉ có một vài thiết bị truyền động. Các hệ thống phức tạp nhất có bốn bánh xe với truyền động bốn bánh độc lập và cơ cấu truyền động cho điều khiển lái bốn bánh. Đối với robot nhiều chân, một chân cần ít nhất 3-DOF, có nghĩa là cần thiết bị truyền động để cung cấp lực kéo và chuyển hướng. Có ít nhất 4 chân để cho một robot ổn định, do đó, số lượng các thiết bị truyền động cho một robot nhiều chân cần phải có ít nhất là 12. Do đó, hệ thống cơ khí và điện cần thiết cho robot nhiều chân sẽ phức tạp và tốn kém hơn so với hệ thống di chuyển bằng bánh xe.
- Hệ thống điện:
Mỗi cơ cấu truyền động đều cần có thiết bị điều khiển đi theo. Do đó, robot nhiều chân yêu cầu hệ thống điện tử nhiều hơn so với các robot có bánh xe. Một vấn đề nữa là các khớp robot phải được kiểm soát, từ đó yêu cầu cần có hệ thống kiểm soát các bộ cảm biến cho mục đích đó. Ngoài việc chân robot cần cảm biến nhiều hơn các bánh xe truyền động, vấn đề khác là cảm biến phải hoạt động đảm bảo. Bánh xe luôn tiếp xúc với mặt đất, trong khi chân phải tiếp xúc theo trình tự, điều này có nghĩa là cần phải có cảm biến để xác định khi bàn chân tiếp xúc mặt đất. Như vậy cần có bộ cảm biến cảm ứng, hoặc một số cảm biến tương tự cho mỗi chân, làm tăng số lượng của cảm biến, cũng như số cổng kết nối để xử lý của bộ điều khiển. Các thuật toán để kiểm soát robot nhiều chân có nhiều phức tạp hơn so với thuật toán được sử dụng để di chuyển các robot bánh xe.
- Giải thuật điều khiển:
Để điều khiển của robot bánh xe, cơ cấu lái chỉ cần một tín hiệu từ bộ điều khiển. Thông thường điện áp này là tỷ lệ thuận với tốc độ yêu cầu hoặc góc lái cần thiết tương ứng. Tuy nhiên một robot bốn chân cần phải đồng thời phối hợp chuyển động của tất cả các khớp của nó, cùng với tín hiệu từ các cảm biến chân để tạo ra sự chuyển động ổn định. Các thuật toán điều khiển cho robot nhiều chân sẽ phức tạp hơn so với các thuật toán cho robot bánh xe.
- Tốc độ di chuyển:
Robot nhiều chân có thể đạt được tốc độ cao hơn là một robot có bánh xe trên địa hình đặc biệt. Trên địa hình chuẩn như đường phố, sàn nhà,… tốc độ của robot bánh xe chắc chắn là lớn hơn.
- Giá thành:
Tổng chi phí của một hệ thống tỷ lệ với độ phức tạp của nó về các thiết bị điện tử, cảm biến,…. Như vậy, một robot nhiều chân sẽ tốn kém hơn so với một robot bánh xe. Bảng dưới trình bày một số số liệu vè sự phức tạp của robot bốn chân và robot bánh xe.
Tóm lại, robot bốn chân không thể thay thế toàn bộ hệ thống di chuyển bánh xe truyền thống. Robot bánh xe thích hợp để sử dụng ở các điều kiện đặc biệt: địa hình tự nhiên, độ cao thay đổi, cấu trúc đặc biệt,…
|
|
Robot bánh xe |
Robot 4 chân |
|
Cơ cấu chấp hành |
2 |
12 |
|
Cơ cấu điều hướng |
2 |
12 |
|
Điều khiển |
2 |
12 |
|
Cảm biến khớp |
2 |
12 |
|
Cảm biến tiếp xúc |
0 |
4 |
|
Máy tính |
1 |
1 |
1.6. Mục tiêu của luận văn:
Với yêu cầu của chương trình, các quy định của thời gian và khối lượn luận văn, tôi xin đưa ra nội dung của luận văn sẽ thực hiện:
- Tìm hiểu tổng quan về robot di chuyển bằng chân.
- Tìm hiểu về các tiêu chuẩn ổn định của robot bước đi.
- Tìm hiểu dáng đi của robot dùng chân.
- Bài toán động học của chân robot.
- Giải thuật điều khiển robot để ổn định độ cao.
- Hoạch định dáng đi và mô phỏng di chuyển của robot
1.7. Nội dung của luận văn:
Chương 1: Tổng quan.
Chương 2: Tiêu chuẩn đánh giá độ ổn định của robot.
Chương 3: Dáng đi của robot bước.
Chương 4: Động học robot
Chương 5: Giải thuật điều khiển robot.
Chương 6: Kết Luận
Chương 2: TIÊU CHUẨN ĐÁNH GIÁ SỰ ỔN ĐỊNH CỦA ROBOT
2.1. Giới thiệu:
Sự ổn định của robot bước được nghiên cứu từ giữa năm 1960, khi McGhee và Frank lần đầu tiên tìm ra sự ổn định tĩnh của Robot có chân. Theo như nghiên cứu, một robot lí tưởng ổn định tĩnh khi hình chiếu theo phương thẳng đứng của tọa độ trọng tâm (center of gravity-COG) nằm trong đa giác hỗ trợ (đa giác nối các chân đang tiếp xúc lên mặt đất). Robot được gọi là lý tưởng được đặt trên giả thuyết là bỏ qua khối lượng của chân, và không xét đến ảnh hưởng động lực học của hệ thống.
Ý tưởng về sự ổn định tĩnh được lấy cảm hứng từ côn trùng. Đặc tính bộ khung cơ thể của động vật chân đốt là bao gồm phần thân tách rời và các khớp phụ nối vào. Côn trùng sử dụng chân của nó đồng loạt để hỗ trợ cơ thể trong suốt quá trình bước đi và đẩy phần thân tới. Vì thế, để di chuyển cơ thể trong khi duy trì sự cân bằng, trình tự của từng bước cần đảm bảo cân bằng tĩnh. Thế hệ đầu tiên của Robot có chân di chuyển theo quy tắc này của Kumar và Waldron, 1989. Với mô hình này, những robot bước đầu tiên là máy móc lớn với cơ cấu nặng, rất khó điều khiển (Song và Waldron, 1989). Áp dụng theo dáng đi cân bằng tĩnh có thể đơn giản hóa quá trình điều khiển. Tuy nhiên, trong quá trình di chuyển, do khối lượng của của phần chân và phần thân lớn, gây ra ảnh hưởng của quán tính và các thành phần động lực học có thể phát sinh, hạn chế chuyển động của robot, phải di chuyển chậm, ở vận tốc cố định. Như vậy, để thực hiện điều khiển chuyển động theo ổn định tĩnh sẽ phải đánh đổi tốc độ di chuyển.
Cách duy nhất để tăng tốc độ bước đi của robot là xem xét động lực học của nó trong điều khiển sự ổn định của robot. Bản chất phức tạp khi xem xét toàn bộ động lực học của robot dẫn đến những nghiên cứu để tìm ra giải pháp cho việc thiết kế phần cơ khí đơn giản, chỉ cần ít bậc tự do (Raibert et al.,1986; Wong và Orin, 1993; Buehler et al., 1998), theo tiêu chí thiết kế áp dụng các tiêu chuẩn cân bằng cho robot hai chân (i.e. humanoid robots), mở rộng thành một cặp chân bổ sung. Chuyển động của robot bốn chân bị giới hạn bởi địa hình bằng phẳng, bởi tiêu chí cân bằng được sử dụng dựa vào điểm moment bằng 0 (Zero Point Moment) (Vukobratovic và Juricic, 1969)– chỉ có hiệu lực trên bề mặt phẳng (Goswamo, 1999; Kimura et al.,1990; Yonedaet al., 1996). Ngoài ra, cơ cấu cơ khí đơn giản của những thiết kế này làm cho robot trở nên không có tác dụng trong những ứng dụng thực tế, nơi yêu cầu các động tác và di chuyển tải. Một số sự cố gắng để chống lại sự ảnh hưởng của động lực học là giới hạn cân bằng tĩnh sự vận động của máy (Gonzalez de Santos et al, 1998; Kanget al, 1997; Lin và Song, năm 1993, Papadopoulos và Rey năm 1996; Yoneda và Hirose, năm 1997; Garcia và Gonzalez de Santos, 2005). Tuy nhiên, một trong những mục tiêu của nghiên cứu sự vận động của robot có chân là sử dụng robot bước đi trong công nghiệp, nông nghiệp và ứng dụng dịch vụ, và như thế robot không có nghĩa là luôn luôn di chuyển với tốc độ cao mà còn phải đảm bảo sự bằng tĩnh trên địa hình không bằng phẳng.
Các chỉ tiêu cân bằng động lực học được xác định cho robot bốn chân được nhắc đến dưới nhiều dạng và tên khác nhau nhưng đều dựa trên ý tưởng: Trọng tâm của thân Robot lên mặt phẳng nằm ngang phải nằm trong đa giác nối các điểm tiếp xúc của chân với mặt phẳng đó. Sự phù hợp của mỗi tiêu chuẩn cho mỗi ứng dụng đặc biệt thì không rõ ràng với tất cả, tùy thuộc vào từng ứng dụng. Tuy nhiên, sử dụng tiêu chuẩn cân bằng không phù hợp cho ứng dụng có thể làm cho mục tiêu không được hoàn thành. Vì thế, cần xác định đúng tiêu chí cân bằng cho ứng dụng để đạt được mục đích sau cùng.
2.2. Tiêu chuẩn đánh giá sự ổn định:
2.2.1. Tiêu chuẩn cân bằng động học:
- Phương pháp hình chiếu trọng tâm:
Tiêu chuẩn cân bằng tĩnh đầu tiên cho Robot có chân di chuyển ở tốc độ không đổi, trên bề mặt bằng phẳng được đưa ra bởi McGhee và Frank (1968)- Phương pháp hình chiếu trọng tâm: Robot cân bằng nếu hình chiều lên phương ngang của tọa độ trọng tâm nằm trong đa giác hỗ trợ (được xác định bởi đa giác khi nối các chân). Sau đó, tiêu chuẩn này được mở rộng cho bề mặt không bằng phẳng bằng cách xác định đa giác hỗ trợ là hình chiếu theo phương thẳng đứng của đa giác hỗ trợ thực tế.
Hình 2. 1. Tiêu chuẩn cân bằng robot
- Giới hạn cân bằng tĩnh (Static Stability Margin - SSM):
Giới hạn cân bằng tĩnh được xác định là khoảng cách ngắn nhất từ hình chiếu của tọa độ trọng tâm đến cạnh của đa giác hỗ trợ. SSM là giới hạn cân bằng tĩnh có tác dụng tốt nhất theo phương ngang trên bề mặt bằng phẳng.
- Giới hạn cân bằng theo chiều dọc:
Do công thức tính giới hạn cân bằng tĩnh khá phức tạp nên Zhang và Song (1959) đã nghiên cứu ra Giới hạn cân bằng theo chiều dọc (Longitudinal Stability Margin - SLSM)- xác định khoảng cách nhỏ nhất từ hình chiếu của tọa độ trọng tâm đến cạnh trước hoặc cạnh sau của đa giác hỗ trợ theo trục dọc của Robot. SLSM là xấp xỉ của SSM, và dễ tính toán hơn.
- Giới hạn cân bằng theo phương nghiêng:
Khi Robot bước được xem xét như một phương tiện di chuyển theo các phương khác nhau thì một giới hạn cân bằng khác được sử dụng để thuận tiện hơn là Giới hạn cân bằng dọc theo phương nghiêng (Crab Longitudinal Stability Margin - SCLSM). SCLSM là khoảng cách ngắn nhất từ tọa độ trọng tâm đến cạnh trước hoặc sau của đa giác hỗ trợ theo trục di chuyển của máy.
- Đa giác hỗ trợ ước lượng:
Mahalingham et al. (1989) xác định đa giác hỗ trợ ước lượng (Conservative support Polygon - CSP) là tập hợp con của đa giác hỗ trợ, để giới hạn chuyển động của hình chiếu tọa độ trọng tâm, từ đó bảo đảm hệ thống cân bằng trong trường hợp có sự hỏng hóc của bất kỳ chân hỗ trợ nào. Tuy nhiên, CSP có hạn chế là chỉ sử dụng cho robot có sáu chân trở lên.
=> Những tiêu chuẩn cân bằng trên đều dựa trên khái niệm hình học. SSM, SLSM, SCLSM đều không phụ thuộc vào chiều cao tọa độ trọng tâm và không xem xét đến động học hay động lực học. Tuy nhiên, sự cân bằng của robot thực tế thì phụ thuộc vào các thông số đó. Do đó khi cần tính toán cụ thể, cần áp dụng thêm những tiêu chuẩn động lực học để có được kết quả chính xác.
2.2.2. Tiêu chuẩn cân bằng năng lượng:
- Giới hạn cân bằng năng lượng:
Phương pháp này được đưa ra bởi Messuri (1985). Anh ấy xác định Giới hạn cân bằng năng lượng (Energy Stability Margin - SESM), là năng lượng nhỏ nhất cần thiết để xô ngã robot quanh cạnh của đa giác hỗ trợ.
Hình 2. 2. Tiêu chuẩn cân bằng năng lượng
Với:
i xác định số cạnh của đa giác hỗ trợ xác định là trục xoay
ns là số chân hỗ trợ,
hi là giá trị của chiều cao của tọa độ trọng tâm trong suốt quá trình ngã tới
Với:
Ri là vector của tọa độ trọng tâm đếm trục xoay,
Là góc Ri tạo với mặt phẳng thẳng đứng.
là góc nghiêng của trục xoay tơi mặt phẳng ngang.
SESM là phương pháp cân bằng tĩnh có hiệu quả hơn. Nó cung cấp khái niệm định tính của lượng năng lượng va chạm mà phương tiện chống lại có suy xét đến độ cao của tọa độ trọng tâm. Tuy nhiên, SESM vẫn không xét đến ảnh hưởng của động lực học có thể phá hủy trạng thái cân bằng của phương tiện. SESM không quan tâm đến ảnh hưởng của địa hình cũng như ảnh hưởng của chân không hỗ trợ.
Phương pháp này trở nên chính xác hơn khi được cải tiến nhờ Nagy (1991), lúc này SESM cân nhắc tới độ lún của chân trên địa hình mềm – Giới hạn cân bằng năng lượng phù hợp (Compliant Energy Stability Margin), và Nagy mở rộng khái niệm đến ảnh hưởng cân bằng của chân đang ở trên không – Giới hạn cân bằng năng lượng ( STESM -Tipover Energy Stability Margin)
- Giới hạn cân bằng năng lượng tiêu chuẩn:
Cuối cùng, Hirose (1998) tiêu chuẩn hóa SESM cho khối lượng robot và đưa ra Giới hạn cân bằng năng lượng tiêu chuẩn (SNESM – Normalized Energy Stability Margin):
SNESM biểu thị hiệu quả nhất giới hạn cân bằng cho máy di chuyển cân bằng tĩnh. Tuy nhiên, khi có ảnh hưởng tác dụng động lực học trong quá trình di chuyển, cân bằng của máy không thể xem xét đúng. Như vậy, tình hình hiện tại trong ứng dụng robot bước, tiêu chuẩn động lực học thì phù hợp hơn
2.2.3. Tiêu chuẩn cân bằng động lực học:
- Phương pháp tâm áp lực:
Tiêu chuẩn động lực học đầu tiên cho robot 4 chân được đưa ra bởi Orin (1976), nó là sự phát triển từ phương pháp hình chiếu tọa độ trọng tâm. Phương pháp tâm áp lực (COP- Central of Pressure): Một robot cân bằng động lực học nếu hình chiếu của COG dọc theo hướng của hợp lực tác động lên COG nằm trong đa giác hỗ trợ. Giới hạn cân bằng động lực học được xác định là khoảng cách ngắn nhất từ COP đến cạnh của đa giác hỗ trợ (Gonzalez de Santos et al.1998 ). Phương pháp tâm áp lực thích hợp với phương pháp tọa độ trọng tâm dưới điều kiện tĩnh và địa hình phẳng.
- Tâm khối lượng:
Kang et al . (1997) đã phát triển COP thành ảnh hưởng của tâm khối lượng (Effective Mass Center - EMC), nó xác định điểm trên mặt phẳng hỗ trợ, nơi mà moment hợp lực do phản lực từ địa hình và moment cân bằng với nhau. Chú ý rằng việc xác định EMC cũng giống như ở robot hai chân xác định điểm moment cân bằng (Zero moment point - ZMP), lần đầu xác định bởi Vukobratovic và Juricic (1969). Tuy nhiên, sử dụng ZMP ở robot bốn chân ít được mở rộng hơn ở robot hai chân bới tiêu chuẩn cân bằng EMC và ZMP không có hiệu lực cho địa hình không bằng phẳng (Khi tính toán ZMP, đa giác hỗ trợ được xác định trên một mặt phẳng).
- Giới hạn cân bằng động lực học:
Hình 2. 3. Lực tác động lên robot và cơ cấu tác động
Cân bằng động lực của COG yêu cầu:
Với
I: quán tính
S: Hỗ trợ
G: Trọng lực
M: Cơ cấu tác động
Trong suốt quá trình nhào tới, robot mất phần lớn chân hỗ trợ, chỉ còn lại những chân tọa thành trục xoay. Hợp lực tương tác FR và moment MR giữa robot và địa hình đưa đến kết quả tạo ra phản lực cộng thêm tại mỗi chân (Fr1) và moment nó tạo ra quanh COG. Đối với robot cần giữ sự cân bằng lực và moment, cần đưa ra moment Mi quanh trục xoay i để cân bằng với lực và moment gây mất ổn định, đảm bảo hệ thống cân bằng. Khi sự bù đáp không đủ, hệ thống gọi là hệ thống động lực học không cân bằng.
Dựa vào trạng thái đó, Lin và Song (1993) đưa ra giới hạn cân bằng động lực học (SDSM): là moment nhỏ nhất trong số các moment Mi quay quanh trục trong đa giác hỗ trợ, tỷ lệ với khối lượng của hệ thống.
Với Pi là vị trí vector từ COG đến chân thứ i, và ei là vector đơn vị quanh đa giác hỗ trợ theo chiều kim đồng hồ. Nếu tổng moment là dương (nếu chúng cùng hướng và chiều với ei ) thì hệ thống cân bằng.
Lưu ý rằng SDSM được sử dụng cho giới hạn cân bằng động lực học của cả Orin và tiêu chuẩn của Lin và Song. Nhưng ở đây SDSM được nhắc đến là của Lin và Song, còn giới hạn cân bằng động lực học của Odin được nhắc tới là SZMP.
Sau đó, Yoneda và Hirose (1997) đưa ra sự đánh giá về cân bằng lúc nhào tới dựa trên phát biểu tương tự. Trong thế cân bằng động lực học của hệ thống, giả định rằng chân không có khối lượng, chân hỗ trợ và phản lực lên chân trùng nhau. Ở đây, Yoneda và Hirose sử dụng hợp lực của phản lực –FR và moment –MR được xác định sự cân bằng của hệ thống như sau:
Từ đó xác định moment Mi quay quanh trục theo công thức sau:
Lưu ý rằng ngược chiều với
Quy luật về sự cân bằng lúc nhào tới phát biểu rằng: hệ thống cân bằng động lực học nếu có tồn tại bất kỳ chân hỗ trợ j trong hướng quay ngăn chặn hệ thống nhào tới. Giới hạn cân bằng đổ tới được tính bằng công thức:
Zhou (2000) đưa ra tiêu chuẩn về moment của chân hỗ trợ cuối. Giới hạn cân bằng của nó cũng giống như STSM, nhưng nó sử dụng kết quả hợp lực FR và MR từ cảm biến ở chân. Do đó, SLESM tránh được lỗi có thể xuất hiện từ STSM từ động lực học của chân.
Phân biệt với ZMP và tiêu chuẩn cân bằng theo động lượng, một tiêu chuẩn khác được đưa ra bới Papadopoulos và Rey (1996). Tiêu chuẩn cân bằng lực- góc xác định góc giữa hợp lực thay thế từ COG trên mặt đất (FR) – ngược chiều với phản lực – và vector Ri, thường là trục xoay từ COG. Hệ thống trở nên không cân bằng khi góc bằng 0. Giới hạn cân bằng Lực- Góc là sản phẩm của số lần góc module của hợp lực FR
Hình 2. 4. Phân tích lực trong tiêu chuẩn cân bằng lực- góc
Sau đó, vài nhà nghiên cứu tìm hiểu về đo lường sự cân bằng của robot từ quan điểm năng lượng. Dựa vào những nghiên cứu trước về giới hạn cân bằng tĩnh để chứng minh là SESM là tối ưu trong điều kiện tĩnh (Hirose 1998) - Khi chỉ có lực có ý nghĩa tác dụng lên robot là trọng lực – vài nhà nghiên cứu đã mở rộng khái niệm SESM để diễn tả động lực học robot, như lực quán tính hoặc ảnh hưởng của cơ cấu tác động. SESM được tính toán từ sự tăng lên của thế năng khi COG xoay quanh cạnh của đa giác hỗ trợ. Do đó, sự mở rộng của SESM để diễn ta động lực học robot có thể tính toán sự tăng lên của năng lượng cơ học qua COG trong suốt quá trình ngã nhào. Ý tưởng này được đứa ra lần đầu bơi Ghasempoor và Sepehri (1998) dùng để đo sự cân bằng của robot trong ứng dụng cơ cấu tác động trên cơ cấu di chuyển bằng bánh xe. Sau đó , Garcia và Gonzalez de Sontos (2005) mở rộng ý tưởng trên ra cho robot di chuyển bằng chân, xác định động lực học ở chân và ảnh hưởng gây mất ổn định, và tiêu chuẩn nó với khối lượng robot. Kết quả là Giới hạn cân bằng năng lượng động lực học tiêu chuẩn. (Normalized Dynamic Energy Stability Margin - SNDESM), được xác định thông qua mô phỏng và nó được thể hiện để định lượng độ chính xác chân bằng của robot trên địa hình không cân bằng trong sự có mặt của sự điều khiển động lực học và sự tác động bên ngoài.
Giới hạn cân bằng năng lượng động lực học tiêu chuẩn được xác định là giá trị nhỏ nhất của sự cân bằng yêu cầu để robot đổ nhào quanh đa giác hỗ trợ, tỷ lệ với khối lượng robot:
Với Ei biểu diễn giá trị cân bằng của cạnh i của đa giác hỗ trợ, với ý nghĩa vật lý là sự gia tăng của năng lượng cơ học cần thiết để robot đổ nhào quanh cạnh thứ i của đa giác hỗ trợ, tính bởi công thức:
Với :
R là vector trực giao đến cạnh I của đa giác hỗ trợ từ vị trí COG.
FRI là thành phần không có lực hấp dẫn của hợp lực của lực tương tác FR.
Ii là moment quán tính quan trục i
là vận tốc góc của COG
là góc nghiêng của cạnh thứ i của đa giác hỗ trợ
là góc xoay quanh trục i.
là góc xoay cần thiết đến vị trí COG trong mặt phẳng thẳng đứng
là góc xoay mà COG xoay từ mặt phẳng thẳng đứng đền mặt phẳng giới hạn, vị trí mà hợp lẹc các moment tác động lên COG cân bằng.
là sự thên vào của hai chuyển động quay.
T là vector tiếp tuyến với quỹ đạo
Ei là vector quanh đa giác hỗ trợ theo chiều kim đồng hồ.
Trong công thức trên, 3 thông số đầu diễn tả năng lượng cần thiết cho quá trình đổ nhào gây ra bởi trọng lực, lực không bao gồm trọng lực và moment. Thông số cuối diễn tả năng lượng động học. SNDESM là giới hạn cân bằng duy nhất đề cập tới ảnh hưởng của việc đẩy tới, ảnh hưởng bên ngoài tới sự cân bằng robot.
Đây là những tiêu chuẩn cân bằng được sử dụng đến hiện nay để điều khiển robot di chuyển bằng chân. Một số để xác định giới hạn cân bằng và không khác nhau một cách rõ ràng. Hơn thế nữa, sự phù hợp để đánh giá cân bằng trong mô phỏng thực tế, hoặc điều khiển lực hoặc moment hoặc ảnh hưởng động lực học trong quá trình di chuyển chân, không được rút ta từ định nghĩa.
Hình 2. 5. Phân tích lực trong giới cân bằng động lực học tiêu chuẩn
Chương 3: DÁNG ĐI CỦA ROBOT BƯỚC
3.1. Khái niệm:
3.1.1. Giới thiệu dáng đi:
Trong tiếng Anh, Gait có nghĩa là cách thức hoặc kiểu di chuyển của chân.
Trong lĩnh vực nghiên cứu sự vận động của chân, Gait là sự lặp lại của các bước di chuyển của chân.
Theo định nghĩa của Song và Waldron (1989): Dáng di chuyển (gait) được xác định bởi thời điểm và vị trí của mỗi chân lúc dậm xuống hoặc nâng lên, được đặt trong hệ tọa độ cùng với chuyển động của thân với 6 bậc tự do, khi thân di chuyển từ điểm này sang điểm khác.
Hình 3. 1. Chuỗi di chuyển chân của robot bốn chân
Thí nghiệm đầu tiên để xác định mô hình toán học cho dáng đi được thực hiện bởi McGhee và Frank, được thực hiện trên robot 4 chân. Những nhà nghiên cứu này cố gắng tìm ra dáng đi phù hợp để duy trì sự cân bằng tĩnh. Về nghiên cứu này, McGhee giới thiệu một chú thích gọi là chũi sự kiện (event sequence). Một sự kiện xác định bới chân dậm xuống hoặc nâng lên. Đối với robot có n chân, vị trí của chân thứ i lúc giẫm xuống thì được biểu thị bởi sự kiện i, trong khi chân i nâng lên thì biểu thị bởi sự kiện i+n. Do đó, một dáng đi được diễn ta bằng chuỗi các sự kiện như 2-4-5-7-3-1-8-6, tạo nên 2n sự kiện khác nhau. Nếu có 2 sự kiện diễn ra cùng lúc, dáng đi được gọi là dáng đi đặc biệt, ngược lại các sự kiện diễn ra theo trình tự, gọi là dáng đi bình thường. Số trường hợp của dáng đi không bình thường của robot 4 chân là sự hoán vị của 2n sự kiện, đó là 2n! xác định số dãy sự kiện từ lúc bắt đầu, kết quả là , đối với robot 4 chân, N=5040 (McGhee, 1968)
N tượng trưng cho số hoán vị các vị trí của sự kiện của chân. Tuy nhiên, để một robot bốn chân giữ cân bằng tĩnh, nó cần phải giữ ít nhất 3 chân hỗ trợ, chỉ duy nhất một chân chuyển động. Điều này có nghĩa là sau khi nhấc chân thứ i (sự kiện i+n) sự dịch chuyển của chân i mới được thực hiện (sự khiện i). Việc này giảm thiểu số tổ hợp cân bằng thành . Kết quả đối với robot bốn chân là chỉ có 6 chũi sự kiện xảy ra. Số chân được đặt từ trước ra sau, số chẵn cho chân bên phải và số lẻ cho chân bên trái đều được chấp nhận.
Tomovic (1961) đã xác định dáng đi của robot n chân như là dáng đi bò (creeping gait) khi mỗi sự hỗ trợ liên quan đến ít nhất n-1 điểm tiếp xúc. Vì thế, dáng đi trong hình ở trên là dáng đi dạng bò: luôn có 3 chân hỗ trợ. Dáng đi bò có dáng đi đặc biệt và dáng đi bình thường. Lưu ý rằng một dáng đi đặc biệt có thể đạt được ở bởi giới hạn của dáng đi bình thường. Do đó, chuỗi sự kiện trên hình được áp dụng cho cả dáng đi đặc biệt và bình thường. Trong trường hợp này, dáng đi đặc biệt có nghĩ là vị trí của chân đặt xuống và chân được nâng lên trong chũi sự kiện kế tiếp cả ra trong cùng thời gian.
Vài năm sau nghiên cứu đó, Hirose (1986) đã tìm ra 6 chũi sự kiện có thể áp dụng để xây dựng dáng đi của robot. Phân ra thành loại và (cho chuyển động theo trục x và y) và loại (cho sự xoay quanh trục z), với ‘+’ nghĩa là di chuyển thuận, và ‘-’ là di chuyển ngược.
McGhee và Frank (1968) nghiên cứu về cân bằng tĩnh học của 6 loại dáng đi, và chỉ ra giới hạn cân bằng tĩnh tối ưu là đạt được bởi dáng đi đều (mỗi chân hỗ trợ một phần như nhau trong chu kỳ chuyển động). Dáng đi này được gọi là dáng bò (crawl gait). Ngạc nhiên là, đây là dáng đi duy nhất được sử dụng bởi robot bốn chân ở vận tốc chậm, do đó, nó được gọi là dáng đi tiêu chuẩn (standard gait). Lưu ý rằng không có định nghĩa nào nói chung cho Crawl gail, nhưng crawl gail và dáng bò (Creeping gait) là như nhau cho robot 4 chân.
Bắt đầu năm 1970s, Bessonov và Umnov (1973) có cùng kết luận khi làm việc với robot 6 chân. Thông qua những thí nghiệm số, họ tìm ra một dáng đi theo chu kỳ, đều, đối xứng (mỗi sự kiện của bên trái – phải xảy ra y hệt nhau trong nửa chu kỳ), đó là sự tối ưu hóa của cân bằng tĩnh. Dáng đi này, và và một nghiên cứu cho robot 4 chân kiến chân di chuyển từ sau tới trước theo dạng sóng của các bước di chuyển ở mỗi bên của thân, nghĩa là sự kiện của mỗi bên trái – phải được diễn ra trong một nửa chu kỳ di chuyển. Bởi vì chuyển động theo dạng sóng chân, dáng đi này được gọi là dáng đi dạng sóng (Wave gait).
3.1.2. Một số khái niệm:
Hình 3. 2. khái niệm vùng hoạt động của chân
- Hệ số sử dụng của chân thứ i là một phần của chu kỳ mà nó nằm trên mặt đất, nếu bằng nhau cho tất cả các chân thì đó là dáng đi đều.
- Hành trình của chân, R, là khoảng cách mà chân di chuyển tương đối so với thân trong suốt pha hỗ trợ. R phải nằm trong vùng làm việc xác định bởi và .
- Hành trình ,P, là khoảng cách giữa tâm hai chân liền kề. là khoảng cách giữa hai chân cùng bên, và là khoảng cách giữa tâm hai chân không cùng bên.
- Độ dài bước đi, , của dáng đi là khoảng cách di chuyển của tọa độ trọng tâm COG của thân trong một chu kỳ di chuyển. Nếu dáng đi theo chu kỳ, ta có:
Với các định nghĩa này, dáng đi dạng sóng loại +x được xác định theo phase của chân, giả định rằng vùng làm việc của các chân không chồng chéo lên nhau, thì .
- Phase của chân: Phase của chân thứ i, , là thời gian mà bình thường mà vị trí của chân thứ i nằm trên mặt đất bị trễ hơn so với chân tham chiếu.
- Dáng đi có chu kỳ (Periodic Gait): Dáng đi gọi là có chu kỳ nếu tất cả các chân có thời gian bước đi là như nhau trong một chu kỳ. Trong một chu kỳ, thì các chân đều trải qua các trạng thái phase như nhau.
- Dáng đi đối xứng (Symmetric Gait): Dáng đi gọi là đối xứng nếu độ lệch phase giữa 2 chân trái phải là ½.
- Dáng đi đều (Regular Gait): Dáng đi có hệ sổ sử dụng của tất cả các chân là như nhau gọi là dáng đi đều.
- Dáng đi dạng sóng (Wave Gait): là dáng đi tuần hoàn, đều, đối xứng, có góc thay đổi phase là hằng số bằng . Dáng đi dạng sóng là dáng đi từ sau ra trước, chân phía trước duỗi ra ngay sau khi chân phía sau vừa mới dậm xuống, tạo ra làn sóng bước di chuyển từ sau tới trước.
3.2. Dáng đi liên tục (Continous Gait):
Dáng di chuyển liên tục là dáng đi được sử dụng rộng rãi trong tự nhiên và robot 4 chân nhân tạo. Khi thực hiện dáng đi liên tục, thân và các chân có sự chuyển động đồng thời với nhau, có nghĩa là thân và các thân sẽ di chuyển cùng lúc, đẩy tới hoặc kéo lui cùng với chân.
Trong dáng đi có chu kỳ:
Với F là hàm phân đoạn.
Một hàm phân đoạn của số thực X được xác định:
khi
McGhee và Frank (1968) diễn tả trong dáng đi dạng sóng được tối ưu:
;
Chú ý rằng điều kiện là để duy trì sự cân bằng tĩnh: mỗi chân hỗ trợ một thời gian ít nhất là ¾ chu kỳ. Để xác nhận điều này, đối với dáng đi dạng sóng, có ít nhất 3 chân hỗ trợ tại mọi thời điểm,
Biểu thức biểu diễn các phase của chân còn được hiểu như là một biểu đồ dáng đi. Biểu đồ dáng đi là một phương pháp để mô tả thời gian mà chân tiếp xúc với mặt đất hoặc ở trên không. Biểu đồ này cũng chỉ ta thời gian tức thời khi một chân chuyển từ trạng thái hỗ trợ sang di chuyển, và ngược lại. Điểm bắt đầu của đường nét đậm là thời điểm mà chân đặt xuống mặt đất, và điểm kết thúc biểu diễn thời diểm khi chân nhấc lên. Biểu đồ này ghi lại chuỗi đặt và nhấc lên của các chân, cũng như quá trình các pha hỗ trợ và duy chuyển của chân.
3.3. Dáng đi không liên tục (Discontinous Gaits):
Dáng đi không liên tục là đặc trưng của chuỗi chuyển động của các chân và thân (Gonzalez de Santos và Jimenez, 1995). Một chân chuyển động với tất cả các chân khác hỗ trợ và dừng lại. Phần thân được đẩy đi với tất cả các chân hỗ trợ và chuyển động đồng loạt, và tất nhiên là phần dấu chân được giữ nguyên.
Để tạo ra dáng đi không liên tục có chu kỳ, cần lưu ý:
- Nếu một chân ở phase hỗ trợ mà nó đạt đến giới hạn sau của vùng làm việc (giới hạn động học), thì chân này cần chuyển sang phase di chuyển để đặt nó đến giới hạn trước.
- Thân được đẩy đi với tất cả các chân đều ở trên mặt đất. Sau khi thân di chuyển, ít nhất một chân nên đặt ở giới hạn động học sau để chuyển sau phase di chuyển, sau đó đến chân tiếp theo chuyển động.
- Chân đối bên và không liền kề (CNA) với chân đang trong phase chuyển động nên được đặt ở điểm sao cho sau khi chân chuyển động dừng lại, COG vẫn nằm trong vùng của đường thẳng nối với chân CNA và chân vừa di chuyển. Theo đó, nó sẽ cho phép nhấn chân tiếp theo lên nhưng vẫn giữ robot cân bằng.
- Chuỗi di chuyển của chân là theo chu kỳ, nó sẽ cho phép những chu kỳ di chuyển khác cũng tham gia thành đường di chuyển.
Trong phần này, sẽ xem xét dáng đi để di chuyển robot theo đường thằng theo trục x của máy và đảm bảo sự cân bằng tĩnh. Có nghĩa là hình chiếu theo phương dọc của COG luôn nằm trong đa giác hỗ trợ. Giới hạn cân bằng tĩnh theo chiều dọc, được sử dụng để đo sự cân bằng
3.3.1. Dáng đi không liên tục 2phase:
- Quỹ đạo của chân:
Như ta đã biết, có 4! Chuỗi di chuyển khác nhau cho robot 4 chân. Những chuỗi này phải kết hợp vị trí các chân để đảm bảo dáng đi cân bằng. Số trường hợp có thể xảy ra là rất nhiều. Để thu hẹp số trường hợp và tìm chuỗi cân bằng duy nhất, vài sự hạn chế được xem xét. Giả định là mỗi chu kỳ thì thân chỉ di chuyển một lần.
Hình 3. 3. Thứ tự di chuyển chân ở dáng đi không liên tục
Đầu tiên, giả định rằng thân di chuyển 2 lần mỗi chu kỳ, hay là 2 phase. Trong trường hợp này, hai chân phải giữ ở giới hạn động học sau của nó sau mỗi phase. Vì thế, mỗi chân di chuyển khoảng bằng hành trình lớn nhất của nó, và số điểm đặt chân giảm xuống thấp nhất. Giả định rằng các chân di chuyển theo chuỗi của dáng đi được mô tả như hình dưới. Điều này có nghĩa là một chân ở giới hạn sau di chuyển trước, sau đó thì chân ở phía trước di chuyển. Sau khi các chân này chuyển động, phần thân được đẩy lên một nửa hành trình. Ở cuối chuyển động này, các chân chưa di chuyển nằm ở giới hạn động học sau của nó. Để hoàn thành nhiệm vụ này, những chân này phải nằm ở giữa không gian làm việc của nó trước khi phần thân di chuyển. Hình dưới diễn tả chuỗi chuyển động 4-2-B-3-1-B của dáng di chuyển không liên tục. B biểu diễn cho sự chuyển động của thân.
Hình 3. 4. Dáng đi không liên tục 2phase
Hình 3. 5. Giảng đồ thời gian di chuyển của chân và thân ở dáng đi không liên tục
- Giới hạn cân bằng theo chiều dài cho dáng đi không liên tục:
Giới hạn cân bằng theo chiều dài, , được xác định dựa vào đường chéo tạo ra bởi 2 chân không liền kề. Với tất cả các trường hợp ở hình biểu diễn dáng đi, đường chéo tạo từ chân ở giữa vùng làm việc đến chân đặt ở giới hạn động học của nó là gần hình chiếu của tọa độ trọng tâm nhât nhất. Như ta thấy thì giới hạn cân bằng theo chiều dài (khoảng cách từ COG đến đường chéo theo trục x) là bằng nhau trong mọi trường hợp, và giá trị của nó được ghi nhận là giá trị tuyệt đối của khoảng cách từ COG đến đường chéo theo trục x.
Khi chân 4 di chuyển, giá trị này được tính: (viết phương trình qua 2 điểm chân, giao với trục tung lại điểm 0 => khoảng cách min)
Với và là tọa độ của 2 đỉnh đường chéo. Những giá trị này khi chân 4 di chuyển là và , với là hành trình theo phương x, là hành trình theo phương y. và là kích thước vùng hoạt động.
Thay những giá trị này nào, ta được:
- Vận tốc của dáng đi không liên tục 2phase:
Vận tốc trung bình của robot di chuyển theo dáng đi không liên tục được xác định nhờ khoảng di chuyển, , và chu kỳ, T. Trong dáng đi không liên tục, chu kỳ được xác định bằng tổng thời gian của các phase và thời gian thân di chuyển.
Với là thời gian chân nhấc lên; là thời gian chân di chuyển, là thời gian chân đặt xuống, và là thời gian thân di chuyển của mỗi phase phụ.
Nếu chiều cao nâng chân là h, khoảng cách di chuyển chân là , vận tốc chân theo trục x,z là và , thì chu kỳ bằng:
Trong dáng đi liên tục, một chân hỗ trợ trong chu kỳ di chuyển khoảng và thời gian di chuyển khoảng với là một chu kỳ của chu trình. Xem như chân di chuyển cùng quỹ đạo với dáng đi không liên tục, thời gian di chuyển:
Do đó:
Để tính vận tốc, cần phải biết khoảng di chuyển của thân trong một chu trình chuyển động. Khoảng di chuyển là đối với dáng đi dạng sóng và với với dáng đi không liên tục, do đó, vận tốc của dáng đi dạng sóng (liên tục), , và dáng đi không liên tục, , được tính:
Để làm một ví dụ so sánh, với , và . Ta có thể thấy rằng vận tốc của dáng đi dạng sóng thì lớn hơn vận của của dáng đi không liên tục ở hệ số sử dụng thấp, và nó trở nên bé hơn khi hệ số sử dụng có giá trị lớn. Với hệ số sử dụng lớn hơn, thì dáng đi liên tục trở nên chậm hơn và kém ổn định hơn dáng đi không liên tục với cùng thông số.
- Giảng đồ dáng đi cho dáng đi không liên tục 2phase.
Hình 3. 6. Giảng đồ dáng đi cho dáng đi không liên tục và liên tục với β=7/9
Hình trên biểu diễn giảng đồ dáng đi cho dáng đi 2 phase không liên tục. Các phase của chân và thân được biểu diễn. Biểu đồ có hình dạng tương tự với biểu đồ dáng đi cho dáng đi dạng sóng với hệ số sử dụng:
Lưu ý rằng biểu đồ dáng đi biểu diễn thời gian mà chân dùng để hỗ trợ hay di chuyển. Hơn thế nữa, trong dáng đi dạng sóng, phần thân di chuyển liên tục dẫn đến khoảng cách di chuyển bởi thân tỷ lệ với độ dài bước chân. Tuy nhiên, dáng đi không liên tục có phần thân di chuyển chỉ 2 khoảng thời gian và khoảng cách di chuyển cân đối với số lần di chuyển của thân.
So sánh giữa dáng đi dạng sóng và dáng đi không liên tục trong phần này dựa trên biểu đồ dáng đi giống nhau của cả hai dáng đi.
3.3.2. Dáng di chuyển không liên tục 4phase:
Để tạo ra dáng đi không liên tục có hiệu quả, cần phải đặt chân ở vị trí giới hạn động học sau của nó trước khi chuyển phase. Với dáng đi 2 phase, sau khi phần thân di chuyển, 2 chân ở phía đối diện phải đặt ở vị trí giới hạn động học của nó. Tuy nhiên, có cách để tạo ra dáng di chuyển mà chỉ có một chân đặt ở vị trí gới hạn động học của nó khi kết thúc phase. Nó đòi hỏi phải có 4 lần di chuyển của thân mỗi chu kỳ (4phase), dẫn đến chỉ cần một chân ở vị trí giới hạn động học sau khi mỗi lần thân di chuyển.
Biểu đồ cho dáng đi này cũng tương tự như cho dáng đi không liên tục 2phase, nhưng mỗi khoảng cách thân di chuyển được chia thành 2 phần diễn ra sau mỗi lần chân chuyển động. Vận tốc của dáng đi này cũng tương tự như dáng đi 2 phase, vì thời gian và tổng khoảng dịch chuyển là như nhau.
Giá trị của dáng đi này:
Giá trị nhỏ hơn ở dáng đi 2phase.
Khi số phase tăng lên, số lần phần thân di chuyển tăng lên, nhưng giá trị nhỏ hơn, trong khi vận tốc không thay đổi.
ðDáng đi không liên tục 2phase có giá trị tốt nhất trong các dáng đi không liên tục. Và vận tốc của nó không phụ thuộc vào số phase.
3.3.3. Dáng đi nghiêng không liên tục 2phase
Dáng đi nghiêng không liên tục 2phase bao gồm sự thay đổi vị trí của chân và di chuyển phần thân theo hướng di chuyển tạo một góc với trục dọc của robot. Để tạo ra dáng đi này (TPDC), chúng ta sử dụng chuỗi chuyển động của chân và thân tương tự như trước đây, chuỗi của dáng đi bình thường, nhưng có quỹ đạo của thân khác.
Khả năng khác của dáng đi này khác nhau tùy thuộc vào vị trí chân ban đầu.
3.3.3.1. TPDC với không có sự thay đổi ở vị trí ban đầu:
Xây dựng dáng đi xiên, bao gồm việc tính toán vị trí đặt chân để tạo ra quỹ đạo đặc biệt của phần thân. Những vị trí đặt chân mới chắc chắn phải nằm bên trong không gian chuyển động của chân và để thực hiện những bước chân rộng thì chỗ đặt chân được nằm ở vùng ranh giới của không gian di chuyển. Do đó, khoảng di chuyển theo phương y được thực hiện tối đa, , và khoảng di chuyển theo trục x thì có quan hệ với khoảng dịch chuyển theo phương y. Hình dưới biểu diễn 2 trường hợp có thể xảy ra:
Hình 3. 7. Các trường hợp quỹ đạo (A,B) chân ở dáng đi nghiêng không liên tục
Trường hợp A:
Trường hợp B:
Hình dưới biểu diễn chuỗi vị trí làm việc của TPDC sử dụng trong trường hợp A.
Với góc nghiêng , mỗi chân di chuyển mỗi chu kỳ chuyển động, và phần thân dịch chuyển ở mỗi phase.
Hình 3. 8. Điểm đặt chân và vùng làm việc ở dáng đi nghiêng không liên tục
Hình trên còn biểu diễn việc xác định cho dáng đi nghiêng (đường nét liền) và dáng đi thẳng (nét đứt): Khi chân đầu tiên di chuyển (chân 4) thì có giá trị như nhau ở cả hai trường hợp. Khi chân 2 di chuyển thì giá trị của giảm xuống ở dáng đi nghiêng. Tiếp tục chân 3 di chuyển thì của dáng đi nghiêng vẫn nhỏ hơn khi đi thẳng. Cuối cùng, chân 1 di chuyển, thì giá trị của dáng đi nghiêng lớn hơn.
Góc nghiêng cho phép của của dáng đi này là từ đến .
3.3.3.2. TPDC với sự thay đổi ở vị trí ban đầu:
Góc nghiêng tối đa mà một robot 4 chân có thể đạt được với sự cân bằng có thể tăng lên nếu quỹ đạo của chân hỗ đi qua tâm của vùng di chuyển của chân.
....................
Chương 6: KẾT LUẬN
6.1. Đánh giá:
o Các nhiệm vụ đã hoàn thành:
- Tính toán và mô phỏng bài toán động học vị trí của robot.
- Đưa ra được giải thuật điều khiển robot đi lên dốc, xuống dốc nhưng vẫn ổn định cao độ và góc lắc của thân robot.
- Mô phỏng dáng đi của robot
o Các hạn chế:
- Chỉ mới dừng lại ở bài toán động học vị trí, chưa tính toán bài toán vận tốc. Chưa có tính toán về động lực học cho robot.
- Do không có các cảm biến ở chân nên việc mô phỏng robot thực chỉ thực hiện mô phỏng vị trí và trình tự các góc dịch chuyển. Các giá trị cảm biến được thay thế bằng thông số cho trước của góc nghiêng.
6.2. Hướng phát triển của đề tài:
- Xây dựng mô hình robot với độ cứng vững, tin cậy cao hơn.
- Có thêm các cảm biến, để xây dựng giải thuật cho robot di chuyển trên bề mặt bất kỳ.
- Xây dựng bài toán động lực học hoàn chỉnh để có thể tính toán chính xác năng lượng, tải trọng có thể mang theo… từ đó áp dụng robot vào các ứng dụng thực tế.
TÀI LIỆU THAM KHẢO
- Manuel F.Silva, J.A.Tenreiro Machado(2007), A historical perspective of legged robots.
- Kar DC (2003), Design of statically stable walking robot: a review. J Robot Syst
- M.Buehler, R.Battaglia, A.Cocosco, G.Hawaker, J.Sarkis, K.Yamazaki, SCOUT: A simple quadruped that walks, climbs, and runs.
- Martin de Lasa, Martin Buehler, Dynamic Compliant Walking of a Quadruped Robot: Preliminary Experiments.
- Ioannis Poulakakis, James A. Smith, Martin Buehler, Modeling and Experiments of Untethered Quadrupedal Running with a Bounding Gait: The Scout II Robot.
- Pablo Gonzalez de Santos, Elena Garcia, Joanquin Estremera, Quadrupedal Locomotion- An Introduction to the Control of Four-legged Robots.
- TS. Pmahaasdasdasdasdhạm Đăng Phước, Giáo trình Robot công nghiệp, NXB ĐH Xây dựng, 2007.
PHỤ LỤC
CHƯƠNG TRÌNH MATLAB
- Tính toán động học thuận
function [ theta1, theta2, theta3 ] = inv_kinematics_right( px, py, pz )
%%
% Han nhan cac thong so dau vao la toa do trong he quy chieu gan voi than
% robot
% Cac gia tri tra ra la goc quay tai cac khop
%%
py = -py;
[a1,a2,a3,b,w,h] = modelParam;
theta1 = atan(px/py);
A = sqrt((sqrt(px^2+py^2)-a1)^2 + pz^2);
theta2 = atan(pz/(sqrt(px^2+py^2)-a1)) + acos((a2^2+A^2-a3^2)/2/A/a2);
theta3 = atan((pz-a2*sin(theta2))/(sqrt(px^2+py^2)-a1-a2*cos(theta2))) - theta2;
end
code
hold on;
plot3(P3(1,:),P3(2,:),P3(3,:),'b','LineWidth',3);
hold on;
plot3(P4(1,:),P4(2,:),P4(3,:),'b','LineWidth',3);
hold on;
plot3(X0(1:i,2),X0(1:i,3),X0(1:i,4),'b','LineWidth',3);
% grid on;
axis equal;
xlabel('X');
ylabel('Y');
zlabel('Z');
axis([-160 (150+2*v0+num_step*2*v0+20) -300 300 -10 (150+(num_step*2+2)*v0*tan(alpha)+30)]);
pause(0.001);
P11 = [P11; p11];
P12 = [P12; p12];
P13 = [P13; p13];
P14 = [P14; p14];
end;
end;
% x = sym('x');
% z = tan(alpha)*(x-160);
figure(3);
plot(P1(1,:), P1(3,:), 'r', 'LineWidth', 2);
hold on;
plot(P2(1,:), P2(3,:), 'g', 'LineWidth', 2);
hold on;
plot(P3(1,:), P3(3,:), 'b', 'LineWidth', 2);
hold on;
plot(P4(1,:), P4(3,:), 'y', 'LineWidth', 2);
hold on;
plot([160 (2*v0+num_step*2*v0)],[0 tan(alpha)*((2*v0+num_step*2*v0)-160)], 'k', 'LineWidth', 2);
hold on;
plot([-160 160], [0 0], 'k', 'LineWidth', 2);
grid on;
title('Leg Trajectory in World Coordinate');
legend('Leg 1','Leg 2','Leg 3','Leg 4');
xlabel('X (mm)');
ylabel('Z (mm)');
axis([-200 600 -20 80]);
figure(4)
title('Body deviation angle');
PA = (P11 + P12)/2;
PB = (P13 + P14)/2;
delta_z = PA(:,3) - PB(:,3);
delta_x = PA(:,1) - PB(:,1);
goc_nghieng_than = atan(delta_z./delta_x);
plot(time, goc_nghieng_than, 'k', 'LineWidth', 2);
grid on;