BỘ ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ DC LYNX SM30


NỘI DUNG ĐỒ ÁN
100 MB Bao gồm tất cả file,.lưu đồ giải thuật... thuyết minh, bản vẽ nguyên lý, bản vẽ thiết kế, FILE lập trình, ĐỒ ÁN TỐT NGHIỆP ĐIỆN tử
BỘ ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ DC LYNX SM30
LỜI NÓI ĐẦU
Ngày nay trong cuộc sống hàng ngày chúng ta thường xuyên gặp hệ truyền động điện ở bất kỳ nơi đâu. Như trong các nhà máy xí nghiệp ở các phương tiện lao động: máy bào, máy doa, máy nâng công cụ, máy cán, máy ép ... Trong cuộc sống hàng ngày chúng ta cũng cần và sử dụng nhiều như thang máy... Như vậy có thể nói truyền động điện đã khẳng định được vai trò của nó trong cuộc sống và trong lao động sản xuất .Do sự phát triển ngày càng mạnh mẽ của kỹ thuật điện tử và tin học nên các hệ truyền động điện cũng có các bước phát triển nhảy vọt. Việc ứng dụng tin học và kỹ thuật điện tử với những thiết bị hiện đại như bộ lập trình PLC, CNC, các cảm ứng điện tử Thyristor điều khiển... vào hệ truyền động điện làm cho hệ truyền động điện ngày càng có ưu điểm nổi bật so với hệ truyền động cũ như: Dải điều chỉnh rộng, độ tin cậy cao, gọn nhẹ và khả năng tự động hoá cao .
Ở nước ta do yêu cầu công nghiệp hoá, hiện đại hoá đất nước nên ngày càng xuất hiện nhiều những dây truyền sản xuất mới có mức độ tự động hoá cao với hệ truyền động hiện đại. Việc xuất hiện các hệ truyền động hiện đại đã thúc đẩy sự phát triển, nghiên cứu, đào tạo ngành tự động hoá ở nước ta tiếp thu khoa học kỹ thuật hiện đại nhằm tăng khả năng sản xuất,tăng chất lượng,đồng thời tiết kiệm được chi phí sản xuất cũng như mọi chi phí cho việc trùng tu bảo dưỡng thiết bị sản. Chính vì vậy việc tạo ra những hệ truyền động mới và điều khiển chúng được dể dàng hơn là việc làm vô cùng xác thực.
Nội dung của cuốn báo cáo này xoay quanh vấn đề về động cơ điện một chiều và phương pháp điều chỉnh tốc độ của động cơ điện một chiều.
Chương I: Giới thiệu chung về động cơ điện một chiều kích từ độc lập
Chương II: Phương pháp điều chỉnh tốc độ động cơ điện một chiều kích từ độc lập
Chương III: Giới thiệu về một bộ drive Lynx Sm 30
Chương IV: Kết luận
CHƯƠNG I: GIỚI THIỆU CHUNG VỀ ĐỘNG CƠ ĐIỆN MỘT CHIỀU KÍCH TỪ ĐỘC LẬP
1.1. Giới thiệu chung về động cơ điện một chiều.
Trong mọi ngành sản xuất hiện nay, các công nghệ tiên tiến, các dây truyền thiết bị hiên đại đã và đang thâm nhập vào nước ta. Vớí chính sách mở cửa của đảng và nhà nước, chắc chắn nền kỹ thuật tiên tiến trên thế giới sẽ ngày càng thâm nhập vào Việt Nam. Tác dụng của các công nghệ mới và những dây truyền, thiết bị hiện đại đã và đang góp phần tích cực thúc đẩy sự nghiệp công nghiệp hoá hiện đại hoá. Các máy điện hiện đại trong mọi lĩnh vực đa phần hoạt động nhờ vào điện năng thông qua các thiết bị chuyển đổi điện năng thành cơ năng, nhiệt năng...Trong các dây truyền hiện đại, các thiết bị máy móc khác muốn hoạt động, vận hành không thể không kể đến các động cơ điện. Đặc biệt hơn nữa trong quyển báo cáo này chúng em muốn đề cập sâu hơn nữa về động cơ điện một chiều. Trong rất nhiều máy móc cần đến các loại động cơ điện một chiều với những mức công suất to nhỏ khác nhau phù hợp với chức năng hoạt động của nó. Động cơ điện một chiều dùng để biến đổi điện năng thành cơ năng hay cơ năng thành điện năng (khi hãm).
Trong động cơ điện có rất nhiều loại khác nhau như: động cơ điện xoay chiều ba pha không đồng bộ Rotor lồng sóc hay dây quấn, động cơ điện xoay chiều ba pha có cổ góp. Động cơ điện một chiều có những loại:
+ Động cơ điện một chiều kích từ độc lập.
+ Động cơ điện một chiều kích từ song song.
+ Động cơ đện một chiều kích từ nối tiếp.
+ Động cơ điện một chiều kích từ hỗn hợp hay kích từ bằng nam châm vĩnh cửu.
Nói tóm lại động cơ điện một chiều được sử dụng rộng rãi và phổ biến trong các dây chuyền thiết bị, các cơ cấu vận hành như thang máy, máy nâng... Nó có vai trò quan trọng và cần thiết trong quá trình công nghiệp hoá và hiện đại hoá của đất nước ta hiện nay. Với cấu tạo không quá phức tạp và khó khăn cho chúng ta chế tạo và sửa chữa nó. Góp phần cải thiện cuộc sống, sức lao động của con người nói chung và nhân dân Việt Nam ta nói riêng.
1.2. Nguyên lý và cấu tạo của động cơ điện một chiều.
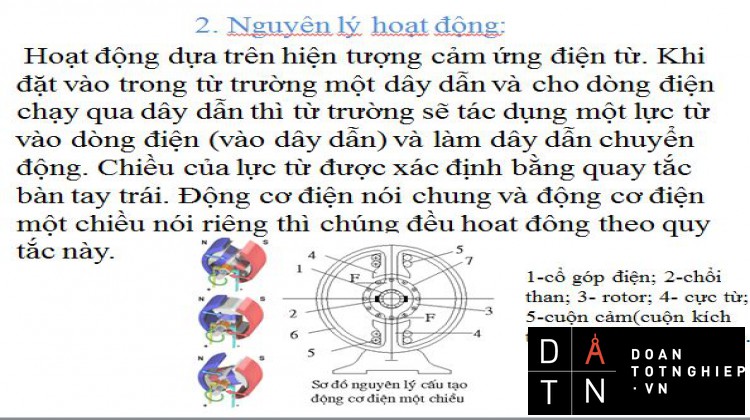
Khi đặt vào trong từ trường một dây dẫn và cho dòng điện chạy qua dây dẫn thì từ trường sẽ tác dụng một lực từ vào dòng điện (vào dây dẫn) và làm dây dẫn chuyển động. Chiều của lực từ được xác định bằng quay tắc bàn tay trái. Động cơ điện nói chung và động cơ điện một chiều nói riêng thì chúng đều hoạt đông theo quy tắc này.
1.2.1. Cấu tạo chung của động cơ điện một chiều:
Cấu tạo của động cơ điện một chiều gồm 2 phần chính là phần tĩnh (Stator) và phần động ( Rotor ).
Hình 1.1 Cấu tạo chung của động cơ điện một chiều
1.2.1.1. Phần tĩnh (hay Stator ) gồm có:
a) Cực từ chính:
Cực từ chính là phần sinh ra từ trường gồm có lõi sắt và cuộn dây:
Lõi sắt cực từ được làm từ các lá thép kỹ thuật hoặc thép cacbon dầy 0,5 mm được ép lại với nhau và tán chặt thành một khối các cực từ được gắn vào vỏ máy bằng các bulông. Một cặp cực từ (đôi cực) gồm hai cực nam - bắc đặt đối xứng với nhau qua trục động cơ, tuỳ theo động cơ mà động cơ có thể có 1, 2, 3, ... các máy điện nhỏ cực từ được làm bằng thép khối. Dây quấn kích từ làm bằng dây đồng có tiết diện tròn hoặc chữ nhật được sơn cách điện và được quấn thành từng cuộn. Các cuộn dây được mắc nối tiếp với nhau. Các cuộn dây được bọc cách điện cẩn thận trước khi đặt vào các cực từ .
Hình 1.2 Cực từ chính của động cơ điện một chiều
b ) Cực từ phụ :
Cực từ phụ được đặt giữa các cực từ chính để cải thiện tình trạng đổi chiều. Cực từ phụ được làm bằng thép khối trên đặt các cuộn dây quấn. Dây quấn cực từ phụ tương tự như dây quấn cực từ chính.
c ) Gông từ :
Gông từ là phần nối tiếp các cực từ. Đồng thời gông từ làm vỏ máy, từ thông móc vòng qua các cuộn dây và khép kín sẽ chạy trong mạch từ. Trong máy điện lớn gông từ làm bằng thép đúc, trong các máy điện nhỏ gông từ làm bằng thép lá được uốn lại thành hình trụ tròn rồi hàn.
d ) Các bộ phận khác :
Nắp máy: Nắp máy dùng để bảo vệ các chi tiết của máy tránh không cho các vật bên ngoài rơi vào trong máy có thể làm hỏng cuộn dây, mạch từ... Đồng thời nắp máy để cách ly người sử dụng với bộ phận của máy khi động cơ đang quay, đang có điện. Ngoài ra nắp máy còn là giá đỡ ổ bi của trục động cơ .
Cơ cấu chổi than: Cơ cấu chổi than để đưa dòng điện từ ngoài vào nếu máy là động cơ và đưa dòng điện ra nếu máy là phát điện. Cơ cấu chổi than gồm có 2 chổi than làm từ than cacbon thường là hình chữ nhật. Hai chổi than được đựng trong hộp chổi than và luôn tỳ lên hai vành góp nhờ 2 lò xo. Hộp chổi than có thể thay đổi được vị trí sao cho phù hợp .
Hình 1.3 Các bộ phận khác của động cơ điện một chiều
1.2.1.2. Phần quay:
Hình 1.4 Rotor (phần quay) của động cơ điện một chiều
a ) Lõi sắt phần ứng :
Lõi sắt phần ứng dùng để dẫn từ, thường được làm bằng tôn Silic dầy 0,5mm có phủ một lớp cách điện sau đó được ép lại để giảm tổn hao do dòng điện xoáy Phucô gây lên. Trên các lá thép có dập các rãnh để khi ép lại tạo thành các rãnh đặt cuộn dây phần ứng vào. Lõi sắt là hình trụ tròn và được ép cứng vào với trục tạo thành một khối thống nhất .
Trong các máy điện công suất trung bình trở lên người ta thường dập các rãnh để khi ép lại tạo thành các lỗ thông gió làm mát cuộn dây và mạch từ .
b ) Dây quấn phần ứng :
Dây quấn phần ứng sinh ra suất điện động và có dòng điện chạy qua. Trong máy điện nhỏ dây quấn phần ứng có tiết diện tròn, với động cơ có công suất vừa và lớn tiết diện dây là hình chữ nhật. Khi đặt dây quấn phần ứng vào rãnh Rotor người ta phải dùng các nêm, chèn lên bề mặt của cuộn dây, các nêm này nằm trong rãnh đặt các cạnh dây quấn để tránh cho dây không bị văng ra ngoài khi dây chịu lực điện từ
tác động.
c ) Cổ góp :
Hình 1.6 Cổ góp của động cơ điện
Cổ góp dùng để đổi chiều dòng điện xoay chiều thành một chiều. Cổ góp gồm nhiều phiến góp bằng đồng ghép lại thành hình trụ tròn sau đó được ép chặt vào trục. Các phiến góp được cách điện với nhau bằng các tấm mea đặt ở giữa. Đuôi các phiến góp nhô cao để hàn đầu dây cuộn dây phần ứng, mỗi phiến góp có đuôi chỉ hàn một đầu dây và tạo thành các cuộn dây phần ứng nối tiếp nhau.
d Các bộ phận khác.
Cánh quạt: dùng để quạt gió làm nguội máy. Máy điện một chiều thường chế tạo theo kiểu bảo vệ, ở hai đầu nắp máy có lỗ thông gió. Cánh quạt lắp trên trục máy , khi động cơ quay cánh quạt hút gió từ ngoài vào động cơ. Gió đi qua vành góp, cực từ lõi sắt và dây quấn rồi qua quạt gió ra ngoài làm nguội máy.
Trục máy: trên đó đặt lõi sắt phần ứng, cổ góp, cánh quạt và ổ bi. Trục máy thường làm bằng thép cacbon tốt.
1.2.2. Nguyên lý làm việc của động cơ điện một chiều:
Từ trường của động cơ được tạo ra nhờ các cuộn dây 5 có dòng điện một chiều chạy qua. Các cuộn dây này gọi là cuộn cảm (hay cuộn kích từ) và được cuốn quanh các cực từ 4. Trên hình vẽ động cơ điện một chiều, stator 6 của động cơ có đặt các cuộn cảm nên stator còn gọi là phần cảm. Từ trường do cuộn cảm tạo ra sẽ tác dụng một từ lực vào các dây dẫn rotor 7 đặt trong các rãnh của rotor 3 khi có dòng điện chạy qua. Cuộn dây này gọi là cuộn ứng. Dòng điện đưa vào cuộn ứng qua các chổi than 2 và cổ góp 1. Rotor mang cuộn ứng nên gọi là phần ứng của động cơ.
Hình 1.7 Sơ đồ nguyên lý cấu tạo động cơ điện một chiều:
1-cổ góp điện; 2-chổi than; 3- rotor; 4- cực từ;
5-cuộn cảm(cuộn kích từ); 6-stator;7-cuộn ứng.
Trong hình vẽ các dây dẫn cuộn ứng ở nửa trên rotor có dòng điện hướng vào, còn các dây dẫn ở nửa dưới của rotor có dòng điện hướng ra khỏi hình vẽ. Từ lực F tác dụng vào các dây dẫn rotor có chiều xác định theo quy tắc bàn tay trái sẽ tạo ra mômen làm quay rotor ngược chiều kim đồng hồ.động cơ trên có 2 cực từ hay một đôi cực (1 cặp cực, P = 1).
Hình 1.8 Động cơ điện một chiều
Trong thời gian động cơ làm việc, cuộn cảm tạo ra từ trường Φd dọc trục cực từ và phân bố đối xứng với cực từ. Mặt phẳng OO trên đó có đặt chổi than, vừa là mặt phẳng chung tính vật lý. Đồng thời dòng điện trong cuộn ứng cũng tạo ra từ trường riêng Φn hướng ngang trục cực từ. Từ trường tổng cộng trong động cơ mất tính chất đối xứng dọc trục (hình 1.6) và mặt phẳng trung tính vật lý quay đi một góc Φ (ngược chiều quay của rotor) so với mặt phẳng trung tính hình học .
Khi mà dòng điện trung tính càng mạnh thì Φn càng mạnh và góc quay β càng lớn. Khi đó ta có thể nói phản ứng phần ứng càng mạnh .
Phản ứng phần ứng là một trong những nguyên nhân gây ra tia lửa điện giữa chổi than và cổ góp cũng như giữa các lá góp trong cổp góp. Chúng ta có thể hạn chế ảnh hưởng này nhờ xoay chổi than theo vị trí mặt phảng trung tính vật lý( tức là theo góc β). Thông thường trong các động cơ điện một chiều hiện nay, người ta thường thê cực từ phụ.
Cực từ phụ được đặt giũa các cực từ chính và cuộn dây cực từ phụ sẽ tạo ra từ trường ngang trục so cới từ trường chính và ngược chiều với từ trường Φn của cuộn ứng để khử từ trường Φn. Nhờ vậy phản ứng phần ứng bị hạn chế và quá trình chuyển mạch trong động cơ sẽ tốt hơn.
Bởi vì rằng từ trường Φn gây ra phản ứng phần ứng tỉ lệ với dòng điện phần ứng Iưnên cuộn dây cực từ phụ được mắc nối tiếp với cuộn dây phần ứng. Do vậy khi dòng điện phần ứng tăng lên thì cuộn dây cực từ phụ cũng sinh ra từ truờng ngược mạnh hơn để khử từ trường Φn.
Ngoài ra, biện pháp tăng khe hở không khí giữa Stator và rotor cũng được áp dụng. Cách này dẫn đến sự tăng kích thước động cơ và phải tăng cường thêm cuộn kích từ chính vì khe hở không khí lớn sẽ làm yếu từ trường chính.
Còn đối với các loại động cơ điện một chiều có công suất trung bình và lớn thì biện pháp chính là thêm cuộn dây bù đặt trong rãnh ở các cực từ chính(như hình vẽ) nhằm tạo ra từ thông Φb ngược chiều với Φn làm từ thông ở khe hở không khí không bị méo nữa và cuộn bù cũng được mắc nối tiếp với cuộn ứng.
Hình 1.9 Động cơ điện một chiều thêm cuộn dây bù
Trên đây là nguyên lý làm việc chung của một động cơ điện nói chung và động cơ điện một chiều nói riêng thì chúng đều hoạt động dựa theo nguyên lý này.Và cùng với các phương pháp để có thể hạn chế được những nhược điểm của động cơ điện một chiều với các phương pháp đã nêu ở trên.
1.3. Phân loại : Động cơ điện một chiều phân loại theo cách kích từ gồm có :
+ Động cơ điện một chiều kích từ độc lập
+ Động cơ điện một chiều kích từ song song
+ Động cơ đện một chiều kích từ nối tiếp
+ Động cơ điện một chiều kích từ hỗn hợp hay kích từ bằng nam châm vĩnh cửu
- Động cơ điện một chiều kích từ độc lập
- Ở động cơ điện một chiều kích từ độc lập, cuộn kích từ cấp điện từ nguồn điện ngoài độc lập với nguồn điện cấp cho rotor(Cuộn ứng). Và khi nguồn điện một chiều có công suất không đủ lớn, mạch điện phần ứng và mạch điện phần kích từ được mắc vào hai nguồn điện một chiều độc lập với nhau, lúc này động cơ được gọi là động cơ điện một chiều kích từ độc lập.
Hình 1.10 : Sơ đồ nối dây động cơ điện một chiều kích từ độc lập
- Nếu cuộn kích từ và cuộn ứng được cấp điện bởi cùng một nguồn điện thì động cơ là loại kích từ song song.Khi nguồn điện một chiều có công suất vô cùng lớn và điện áp không đổi thì phần ứng và phần kích từ thuờng mắc song song. Trong truờng hợp này mà nguồn điện có công suất rất lớn so với công suất động cơ thì tính chất động cơ sẽ tương tự như động cơ kích từ độc lập.
Hình 1.11 : Sơ đồ nối dây động cơ điện một chiều kích từ song song
Khi nguồn một chiều có điện áp thay đổi thì mạch phần ứng và mạch kích từ mắc vào hai nguồn khác nhau gọi là động cơ kích từ độc lập.
Động cơ điện một chiều kích từ độc lập sử dụng nguồn điện một chiều, có nguồn kích từ được cấp từ nguồn phụ bên ngoài, do đó từ thông luôn luôn là hằng số (fđm = const) ( không phụ tải ), dòng điện phần ứng Iu = I chỉ phụ thuộc dòng kích từ.
Động cơ điện một chiều được sử dụng rộng rải trong truyền động như : máy cán thép, thang máy, máy nâng cẩu và các máy công cụ chính xác khác…
Động cơ điện một chiều kích từ độc lập có đặt tính cơ tương đối ứng tức moment tải biến thiên nhiều, tốc độ động cơ biến thiên bé nên có thể điều chỉnh tốc độ động cơ bằng nhiều phương pháp khác nhau. Nó có khả năng quá tải lớn về moment và khả năng khởi động tốt.
1.3.2 Đặc tính của động cơ ở chế độ xác lập :
Từ sơ đồ trong như (hình 1-1), ta viết được phương trình điện áp phần ứng :
U = E + (Rư + Rf )I (1.1)
Trong đó :
U là điện áp phần ứng (V)
E là sức điện động phần (V)
Rư là điện trở phần ứng, gồm điện trở phần ứng, điện trở cực từ phụ, điện trở cuộn từ bù, điện trở tiếp xúc.
Rư = rư + rcf + rcb + rtf
Rf là điện trở phụ thêm vào mạch phần ứng (W)
Sức điện động của phần ứng được tính theo công thức :
(1.2)
Trong đó :
P là số đôi cực từ chính.
N là số thanh dẫn tác dụng của cuộn dây phần ứng.
a là số mạch nhánh song song.
f là từ thông dưới dạng cực (wb) .
là tốc độ góc.
là hệ số cấu tạo của động cơ.
Kef = L hệ số từ thông của động cơ
Sức từ động quay trong một phút
với : rad/s (1.3)
Đây là phương trình đặc tính cơ điện của động cơ kích từ độc lập .
Đặt K = Ke fm là hằng số ở chế độ định mức.
Moment điện từ của động cơ được xác định theo biểu thức :
(1.4)
Từ (1.4) ta rút ra được dòng điện
Thế vào (1.3) ta được :
(1.5)
Nếu bỏ qua tổ thất do ma sát trong ổ trục, tổn thất trong lỗi thép thì moment của động cơ chính bằng moment điện từ.
Ta có : Mđt = Mcơ = M
Lúc này (1.5) sẽ trở thành : (1.6)
Phương trình (1.6) là phương trình đặc tính cơ của động cơ kích từ độc lập.
Nếu không xét đến phản ứng phần ứng dọc trục làm giảm từ thông của động cơ, tức coi f = const thì các phương trình (1.4) và (1.6) là tuyến tính theo I và M tức là đặc tuyến đoạn thẳng.
Từ đặc tuyến trên, khi I = 0 hoặc M = 0, ta đều có = o = U/Kf, gọi là điểm không tải lý tưởng của động cơ.
Khi = 0
I = = Inm (1.7)
M= Kf Inm = Mnm (1.8)
Inm, Inm là dòng điện , moment ngắn mạch (không tải)
Từ (1.5) và (1.6) có :
D là độ sụt dốc tương tướng giá trị của T.
Dạng đặc tính cơ ở trên chỉ là quan hệ = f(Mđt) còn moment cơ do có tổn thất nên ta có : Mcơ = Mđt DM
Trong đó : Dấu “ - ” tương ứng quay chiều dương.
Dấu “ + ” tương ứng quay chiều âm.
Do đó quan hệ = f(Mcơ) có dạng như hình 1-4. Trong tính toán Mcơ được xác định theo công xuất trên trục :
Ở chế độ định mức thì Pcơ chính là công xuất định mức ghi trên nhãn máy. moment điện từ được xác định theo chiều dòng điện phần ứng và từ thông như biểu thức (1.4).
Quan hệ = f(Mđt) và = f(Mcơ)
Thực tế : Nếu không dùng đến biện pháp đặc biệt để khử phản ứng phần ứng thì tkhi dòng điện phần ứng tăng, phản ứng phần ứng ngang trục sẽ tăng làm từ thông giảm, do đó tốc đọ động cơ tăng lên và đặc tính có dạng đường nét đứt trên ( hình 1-4) mà ở vùng I < I đm, M < Mđm phản ứng phần ứng không đáng kể, mạch từ máy điện đang bão hoà nên đặt tính vần còn ở dạng đường thẳng.
Trị số Inm không phụ thuộc vào từ thông nên không bị ảnh hưởng phản ứng phần ứng của động cơ, Mnm giảm do từ thông giảm. Mặt khác dưới tác dụng phản ứng phần ứng động cơ bị khử từ nên đặt tính cơ có thể có đoạn độ cứng dương (đoạn nét đứt trên hình 1-3).
Để khử phản ứng phàn ứng trong các máy điện một chiều, người ta quấn dây cuộn bù. Do trong hầu hết máy điện một chiều đều thiết kế cuộn dây bù nên ta xem đặc tính động cơ là đường thẳng.
1.3.3 Ảnh hưởng của các thông số điện đối với đặc tính cơ:
Phương trình (1.6) cho thấy, đường đặc tính cơ bậc nhất = f(M) phụ thuộc vào các hệ số của phương trình, trong đó có chứa các thông số điện U, R và . Ta xét ảnh hưởng của từng thông số này.
1.3.3.1. Trường hợp thay đổi điện áp phần ứng
U = var; R = const; = const
Hình 1.15 Họ đặc tính cơ của động cơ điện một chiều kích từ độc lập khi giảm điện áp phần ứng
Vì điện áp đặt vào phần ứng không thể vượt quá giá trị định mức nên ta chỉ có thể thay đổi về phía giảm. Trường hợp này, độ dốc (hay độ cứng) của đặc tính cơ không thay đổi:
|β| = conts
Còn tốc độ không tải lý tưởng thay đổi tỉ lệ thuận với điện áp :
= var
Như vậy, khi thay đổi điện áp đặt vào phần ứng, ta được một họ các đường đặc tính cơ song song với đường đặc tính cơ tự nhiên và thấp hơn đường đặc tính cơ tự nhiên. Các đường đặc tính cơ này gọi là các đường đặc tính cơ nhân tạo .
1.3.3.2 Trường hợp thay đổi điện trở mạch phần ứng
R = var; U = const; = const
Vì R = Rư + Rf nên điện trở mạch phần ứng chỉ có thể thay đổi về phía tăng Rf . Trường hợp này, tốc độ không tải giữ nguyên:
=conts
Còn độ dốc (hay độ cứng) thay đổi tỉ lệ thuận theo R:
|β| = va
Hình 1.16 Họ đặc tính cơ của động cơ khi thay đổi Rư
Như vậy, khi tăng điện trở Rf trong mạch phần ứng, ta được một họ các đường đặc tính cơ nhân tạo cùng đi qua điểm (0, ).
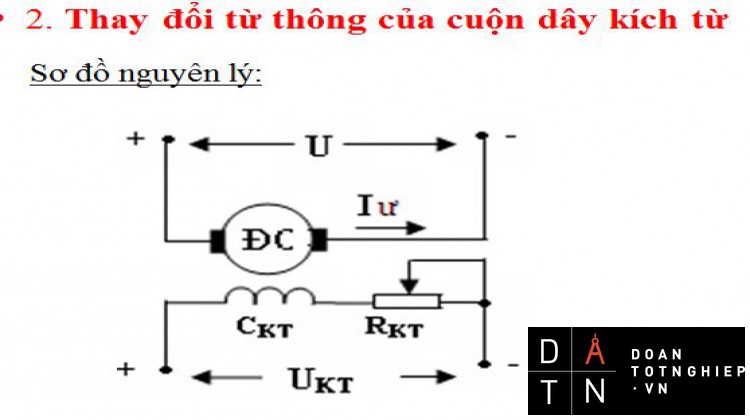
1.3.3.3 Trường hợp thay đổi từ thông kích từ :
= var; R = const; U = const
Để thay đổi từ thông , phải thay đổi dòng kích từ nhờ biến trở Rkt mắc ở mạch cuộn cảm. Vì chỉ có thể tăng Rkt nên từ thông kích từ chỉ có thể thay đổi về phía giảm. Trường hợp này, cả tốc độ không tải lý tưởng và độ dốc đặc tính cơ đều
thay đổi.
= var
|β| = var
Khi giảm từ thông tăng, còn độ dốc thì giảm mạnh.
Hình 1.17 Họ đặc tính cơ của động cơ điện một chiều kích từ độc lập khi
giảm từ thông
1.3.4 Đảo chiều quay động cơ:
Chiều từ lực tác dụng vào dòng điện xác định theo quy tắc bàn tay trái. Khi đảo chiều từ thông hay đảo chiều dòng điện thì từ lực có chiều ngược lại. Vậy, muốn đảo chiều quay của động cơ điện một chiều có thể thực hiện một trong hai cách:
- Hoặc đảo chiều từ thông (qua đảo chiều dòng điện kích từ)
- Hoặc đảo chiều dòng điện phần ứng.
Đường đặc tính cơ của động cơ khi quay thuận và khi quay ngược là đối xứng nhau qua gốc tọa độ.
Phương pháp đảo chiều từ thông thực hiện nhẹ nhàng vì mạch từ thông có công suất nhỏ hơn mạch phần ứng. Tuy vậy, vì cuộn kích từ có số vòng dây lớn, hệ số tự cảm lớn, do đó thời gian đảo chiều tăng lên nên phương pháp này ít dùng. Ngoài ra, dùng phương pháp đảo chiều từ thông thì khi từ thông qua trị số không có thể làm tốc độ tăng quá, không tốt.
1.3.5 Mở máy động cơ kích từ độc lập:
Lúc bắt đầu đóng điện cho động cơ, tốc độ động cơ còn bằng không nên dòng điện động cơ Inm tính theo Inm = rất lớn, tạo ra mô men ngắn mạch Mnm tính theo Mmm=Mnm=kdm Inm cũng rất lớn và có thể gây ra các hậu quả xấu.
Dòng điện mở máy:
Đối với động cơ có công suất càng lớn thì Rư thường có giá trị càng nhỏ và dòng I càng lớn. Điều này làm xấu chế độ chuyển mạch trong động cơ, đốt nóng mạch
động cơ và gây sụt áp lưới điện. Tình trạng càng xấu hơn nếu hệ truyền động điệnthường phải mở máy, đảo chiều, hãm điện thường xuyên như ở máy trục, máy cán đảo chiều, thang máy lên xuống , v.v…
Mô men mở máy quá lớn sẽ tạo ra các xung lực động làm hệ truyền động bị giật, lắc, không tốt về mặt cơ học, hại máy và có thể gây ra nguy hiểm như: gãy trục, vỡ bánh răng, đứt cáp, đứt xích , v.v…
Mmm=Mnm=kdm Inm
Vậy để đảm bảo an toàn cho động cơ và các cơ cấu truyền động cũng như tránh ảnh hưởng xấu tới lưới điện, phải hạn chế dòng điện khi mở máy, không cho vượt quá giá trị:
Imm=(1,5 ÷2,5) Iđm
Nghĩa là cần phải thêm điện trở phụ Rphụ hoặc điện áp đặt vào mạch phần ứng sao cho:
Imm= (1,5 ÷2,5) Iđdm
Công suất động cơ lớn thì chọn Imm nhỏ.
Trong quá trình mở máy, tốc độ động cơ tăng dần, sức điện động của động cơ. E = k cũng tăng dần và dòng điện động cơ bị giảm:
I=
Do đó mô men động cơ cũng giảm. Do vậy, khi mô men giảm đi một mức nào đó thì phải cắt điện trở phụ Rphụ trong mạch phần ứng để động cơ trở về làm việc (hay tiếp phụ tục mở máy) trên đặc tính tự nhiên.
Tóm lại, để hạn chế dòng điện quá lớn lúc mở máy phải thêm điện trở vào mạch phần ứng hoặc thay đổi điện áp phần ứng (Uư ). Trong quá trình động cơ tăng tốc, phải loại bỏ dần các điện trở mở máy ra khỏi mạch phần ứng.
CHƯƠNG II : CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ KÍCH TỪ ĐỘC LẬP
Từ phương trình 1.6 ở phần 1.3.2 ta có phương trình đặc tính cơ của động cơ là:
Từ phương trình đặc tính cơ của động cơ, ta nhận thấy tốc độ phụ thuộc vào 3 thông số là : R, φ, U. Do vậy có 3 phương pháp điều khiển động cơ điện một chiều như sau :
- Điều khiển tốc độ động cơ bằng cách thay đổi giá trị điện trở mạch phần ứng của động cơ.
- Điều khiển tốc độ động cơ bằng cách thay đổi từ thông φ.
- Điều khiển tốc độ động cơ bằng cách thay đổi giá trị điện áp phần ứng.
2.1. Điều khiển tốc độ động cơ bằng cách thay đổi giá trị điện trở mạch phần ứng.
Phương pháp điều chỉnh tốc độ bằng cách thay đổi điện trở phụ trên mạch phần ứng có thể được dùng cho tất cả động cơ điện một chiều. Trong phương pháp này điện trở phụ được mắc nối tiếp với mạch phần ứng của động cơ theo sơ đồ nguyên lý
như sau:
............................................
ài tập 7:
Điều chỉnh tốc độ động cơ DC với các thông số của động cơ như sau:
nđm = 1200 vòng/phút ; UA = 205 V; UF = 205 V;
P = 5KW; IA = 0.2A; IF = 0.33A
Yêu cầu: Điều chỉnh tốc độ động cơ DC bằng điều chỉnh tốc độ, có số vòng quay sử dụng phương pháp phản hồi điện áp phần ứng (AVF)
Thực hiện:
Ta thực hiện đấu nối bộ điều chỉnh tốc độ động cơ LYNX SM30 theo như sơ đồ đấu nối dây như hình vẽ:
Lựa chọn chế độ SW 1.8 để sử dụng phương pháp phản hồi điện áp phần ứng (AVF), ta chọn SW1.8 ở chế độ ON. Điều chỉnh RV1 bằng giá trị max, RV2 max
Lựa chọn SW1.1 ; SW1.2; SW1.3 ; SW1.4; SW1.5 ; SW1.6 ; SW1.7 ở chế độ OFF.
RV3A, RV3B, RV4, RV5, RV6 điều chỉnh max.
Để thay đổi tốc độ động cơ ta thay đổi điện áp phần ứng cấp cho động cơ. Vì thế ta điều chỉnh biến trở Speed set tăng dần cho đến giá trị điện áp đúng yêu cầu đề bài
Kết quả thực tế cho thấy điện áp max động cơ đạt được từ 13V đến 26V
Bài tập 8:
Điều chỉnh tốc độ động cơ DC với các thông số của động cơ như sau:
nđm = 1200 vòng/phút ; UA = 205 V; UF = 205 V;
P = 5KW; IA = 0.2A; IF = 0.33A
Yêu cầu: Điều chỉnh tốc độ động cơ DC bằng điều chỉnh tốc độ, có số vòng quay sử dụng phương pháp phản hồi điện áp của máy phát tốc (Tacho Feedback)
Thực hiện:
Ta thực hiện đấu nối bộ điều chỉnh tốc độ động cơ LYNX SM30 theo như sơ đồ đấu nối dây như hình vẽ:
Lựa chọn chế độ SW 1.8 để sử dụng phương pháp phản hồi điện áp của máy phát tốc (Tacho Feedback), ta chọn SW1.8 ở chế độ OFF. Điều chỉnh RV1 bằng giá trị max,RV2 max
Lựa chọn SW1.1 ; SW1.2; SW1.3 ; SW1.4; SW1.5 ; SW1.6 ; SW1.7 ở chế độ OFF.
RV3A, RV3B, RV4, RV5, RV6 điều chỉnh max.
Để thay đổi tốc độ động cơ ta thay đổi điện áp phần ứng cấp cho động cơ. Vì thế ta điều chỉnh biến trở Speed set tăng dần cho đến giá trị điện áp đúng yêu cầu đề bài
Kết quả thực tế cho thấy điện áp max động cơ đạt được từ 13V đến 26V
Bài tập 9:
Điều chỉnh tốc độ động cơ DC với các thông số của động cơ như sau:
nđm = 1200 vòng/phút ; UA = 205 V; UF = 205 V;
P = 5KW; IA = 0.2A; IF = 0.33A
Yêu cầu: Điều chỉnh tốc độ động cơ DC bằng cách điều chỉnh Momen. Có số vòng quay sử dụng phương pháp phản hồi điện áp của máy phát tốc (Tacho Feedback)
Thực hiện:
Ta thực hiện đấu nối bộ điều chỉnh tốc độ động cơ LYNX SM30 theo như sơ đồ đấu nối dây như hình vẽ:
Lựa chọn chế độ SW 1.8 để sử dụng phương pháp phản hồi điện áp của máy phát tốc (Tacho Feedback), ta chọn SW1.8 ở chế độ OFF. Điều chỉnh RV1 bằng giá trị max,RV2 max
Cài đặt giá trị của SW1.5 là giá trị ON để điều chỉnh Momen
Lựa chọn SW1.1 ; SW1.2; SW1.3 ; SW1.4 ; SW1.6 ; SW1.7 ở chế độ OFF.
RV3A, RV3B, RV4, RV5, RV6 điều chỉnh max.
Để thay đổi tốc độ động cơ ta thay đổi điện áp phần ứng cấp cho động cơ. Vì thế ta điều chỉnh biến trở Torque set tăng dần cho đến giá trị điện áp đúng yêu cầu đề bài
Kết quả thực tế cho thấy điện áp max động cơ đạt được từ 13V đến 26V
Bài tập 10:
Cài đặt các giá trị SW1.3 và SW1.4 để điều chỉnh dòng điện trong mỗi trường hợp On và Off của SW1.3 , SW1.4. Lập bảng và thực hiện so sánh các giá trị nhận được?
Thực hiện:
Sau khi thực hiện các điều chỉnh SW1.3 và SW 1.4 ta được các giá trị của dòng điện như sau :
0 = switch off, 1 = switch on,
|
Sw 1.3 |
Sw 1.4 |
%FLC |
LYNX SM30 |
|
0 |
0 |
100 |
30 |
|
0 |
1 |
75 |
23 |
|
1 |
0 |
50 |
15 |
|
1 |
1 |
25 |
12 |
Nhận xét : khi ta điều chỉnh SW1.3 và SW 1.4 ở chế độ Off thì cho dòng điện giới hạn là lớn nhất và tỷ lệ là 100% FLC và dòng nhỏ nhất khi SW1.3 và SW1.4 ở chế độ On và tỷ lệ là 40% FLC.
Bài tập 11 :
Cài đặt các giá trị SW1.6 và SW1.7 để điều chỉnh điện áp trong mỗi trường hợp On và Off của SW1.6 , SW1.7 ở chế độ phản hồi điện áp phần ứng ( AVF). Lập bảng và thực hiện so sánh các giá trị nhận được?
Thực hiện:
Sau khi thực hiện các điều chỉnh SW1.6 và SW 1.7 ta được các giá trị của điện áp hồi tiếp phần ứng ( AVF ) như sau :
0 = switch off, 1 = switch on,
|
Sw 1.6 |
Sw 1.7 |
Max volts |
|
0 |
0 |
360 |
|
0 |
1 |
200 |
|
1 |
0 |
100 |
|
1 |
1 |
50 |
Nhận xét : : khi ta điều chỉnh SW1.6 và SW 1.7 ở chế độ Off thì cho giới hạn điện áp hồi tiếp về lớn nhất là 360V DC và giới hạn điện áp nhỏ nhất là 50V DC khi SW1.6 và SW1.7 ở chế độ On
Bài tập 12:
Cài đặt các giá trị SW1.6 và SW1.7 để điều chỉnh điện áp trong mỗi trường hợp On và Off của SW1.6 , SW1.7 ở chế độ phản hồi điện áp bằng máy phát tốc (Tacho feedback) . Lập bảng và thực hiện so sánh các giá trị nhận được?
Thực hiện:
Sau khi thực hiện các điều chỉnh SW1.6 và SW 1.7 ta được các giá trị của điện áp hồi tiếp bằng máy phát tốc ( Tacho Feedback ) như sau :
0 = switch off, 1 = switch on,
|
Sw 1.6 |
Sw 1.7 |
Max volts |
|
0 |
0 |
120 |
|
0 |
1 |
60 |
|
1 |
0 |
30 |
|
1 |
1 |
15 |
Nhận xét : : khi ta điều chỉnh SW1.6 và SW 1.7 ở chế độ Off thì cho giới hạn điện áp hồi tiếp về lớn nhất là 120V DC và giới hạn điện áp nhỏ nhất là 15V DC khi SW1.6 và SW1.7 ở chế độ On
DANH MỤC TÀI LIỆU THAM KHẢO
[1] “Điều khiển động cơ một chiều” Thenvena, Hải Âu, Nguyễn Bá Hải. dieukhien.net, 2010.
[2] “Lý thuyết động cơ DC”, Nguyễn Bá Hải, Hoàng Anh .hocdelam.org, 2010.
[3] Kĩ Thuật Điện, Nguyễn Kim Đính, Nhà xuất bản Đại học quốc gia TP. Hồ
Chí Minh
[4] Điện tử công suất - Nguyễn Bính ( Nhà xuất bản KHKT)
[5] Truyền động điện – Nguyễn Văn Liên ( Nhà xuất bản KHKT)
MỤC LỤC
CHƯƠNG I: GIỚI THIỆU CHUNG VỀ ĐỘNG CƠ ĐIỆN MỘT CHIỀU KÍCH TỪ ĐỘC LẬP 1
1.1. Giới thiệu chung về động cơ điện một chiều. 1
1.2. Nguyên lý và cấu tạo của động cơ điện một chiều. 2
1.2.1. Cấu tạo chung của động cơ điện một chiều:. 2
1.2.1.1. Phần tĩnh :. 2
1.2.1.2. Phần quay:. 4
1.2.2. Nguyên lý làm việc của động cơ điện một chiều:. 6
1.3. Phân loại : 9
1.3.1 Động cơ điện một chiều kích từ độc lập. 9
1.3.2 Đặc tính của động cơ ở chế độ xác lập :. 11
1.3.3 Ảnh hưởng của các thông số điện đối với đặc tính cơ:. 15
1.3.3.1. Trường hợp thay đổi điện áp phần ứng. 15
1.3.3.2 Trường hợp thay đổi điện trở mạch phần ứng. 16
1.3.3.3 Trường hợp thay đổi từ thông kích từ : 17
1.3.4 Đảo chiều quay động cơ:. 17
1.3.5 Mở máy động cơ kích từ độc lập:. 18
CHƯƠNG II : CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ KÍCH TỪ ĐỘC LẬP 20
2.1. Điều khiển tốc độ động cơ bằng cách thay đổi giá trị điện trở mạch phần ứng. 20
2.2. Điều khiển tốc độ động cơ bằng cách thay đổi từ thông của cuộn dây kích từ. 22
2.3. Phương pháp điều chỉnh tốc độ động cơ bằng cách thay đổi giá trị điện áp phần ứng. 24
2.4. Các phương pháp điều khiển tốc độ động cơ bằng cách thay đổi điện áp phần ứng. 26
2.4.1. Nguyên lý điều chỉnh:. 26
2.4. 2. Hệ truyền động máy phát – động cơ ( MF – ĐC ). 27
2.4.3. Hệ truyền động xung áp – động cơ ( XA – ĐC ). 29
2.4.4. Hệ truyền động chỉnh lưu – động cơ ( CL – ĐC ). 32
2.4.4.1. Chỉnh lưu một nửa chu kì có điều khiển :. 36
2.4.4.2. Chỉnh lưu cả chu kì với biến áp có trung tính. 37
2.4.4.3. Chỉnh lưu cầu một pha có điều khiển :. 38
2.4.4.4. Chỉnh lưu tia ba pha có điều khiển :. 40
2.4.4.5. Chỉnh lưu cầu ba pha điều khiển đối xứng. 41
2.4.4.6. Chỉnh lưu cầu ba pha điều khiển không đối xứng. 43
2.4.4.7. Chỉnh lưu tia sáu pha. 44
2.5 Hệ Chopper Động Cơ. 46
2.5.1 Bộ chopper giảm áp. 46
2.5.2. Chopper tăng áp. 48
Chương III Giới thiệu bộ điều chinh tốc độ động cơ LYNX SM30. 50
3.1. Giới thiệu:. 50
3.2. Đặc điểm kĩ thuật:. 50
3.3. Các ngõ vào điều khiển:. 51
3.4.Các biến trở điều chỉnh:. 51
3.5. Cài đặt chế độ bởi DIL Switch :. 52
3.6 Bảng các jumper/công tắc cài đặt:. 52
3.7. Vận hành:. 53
3.8. Lựa chọn điều khiển. 54
3.8.1. Chức năng chuyển đổi (SW). 54
3.8.2. Lựa chọn liên kết. 56
3.8.2.1. LK1 lựa chọn nguồn chính:. 56
3.8.2.2. Lk6 tốc độ thấp hoặc yêu cầu tốc độ thấp. 56
3.8.2.3 RV1 Tốc độ cực đại 57
3.8.2.4. RV2 Tốc độ cực tiểu. 57
3.8.2.5. RV3/RV3A Điều khiển theo nấc (dốc). 57
3.8.2.6. RV4 IR bù. 57
3.8.2.7. RV5 Dòng giới hạn và quá dòng. 57
3.8.2.8. RV6 tính ổn định. 58
3.9. Máy phát tốc. 58
3.10. Điều khiển momen. 58
3.11. Tìm kiếm lỗi 59
3.12 sơ đồ đấu dây:. 61
3.13. Kết quả từ khảo sát thực tế. 62
Chương 4. Hệ thống các bài tập. 64
DANH MỤC TÀI LIỆU THAM KHẢO.. 76











