ĐỒ ÁN TỐT NGHIỆP ĐIỆN tử HỆ THỐNG CÂN ĐIỆN TỬ


NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐỀ TÀI TỔNG ĐÀI PABX 104
MỤC LỤC
ààà
Trang
PHẦN MỘT: TỔNG QUAN VỀ HỆ THỐNG CÂN ĐIỆN TỬ 1
CHƯƠNG I: HỆ THỐNG CÂN SỬ DỤNG LOADCELL 1
VÀ ỨNG DỤNG
CHƯƠNG II: SƠ LƯỢC CÁC PHƯƠNG PHÁP VÀ CẢM BIẾN 3
ĐƯỢC DÙNG TRONG ĐO KHỐI LƯỢNG
I. CÁC PHƯƠNG PHÁP ĐO KHỐI LƯỢNG 3
II. GIỚI THIỆU VỀ LOADCELL 4
1. Lý thuết về load cell 10
2. Một số loadcell thực tế 11
3. Giới thiệu loadcell sử dụng trong luận án này 13
CHƯƠNG III: GIỚI THIỆU MỘT BỘ HIỂN THỊ KHỐI 15
LƯỢNG CỤ THỂ VÀ CÁCH CÂN CHỈNH CHO
ĐẦU CÂN THỰC TẾ
PHẦN HAI: LÝ THUYẾT ỨNG DỤNG KHI THIẾT KẾ MẠCH 18
DÙNG CHO HỆ THỐNG CÂN SỬ DỤNG LOADCELL
I. PHƯƠNG PHÁP BIẾN ĐỔI A/D 18
II.BỘ KHUẾCH ĐẠI 20
1. Bộ khuếch đại không đảo 20
2. Bộ khuếch đảo 20
3. Mạch khuếch đại dùng cho tín hiệu vi sai 21
PHẦN BA: PHẦN THIẾT KẾ 23
CHƯƠNG IV: DÙNG VI XỬ LÝ THỰC HIỆN CÔNG VIỆC 23
CỦA ĐẦU CÂN THỰC TẾ
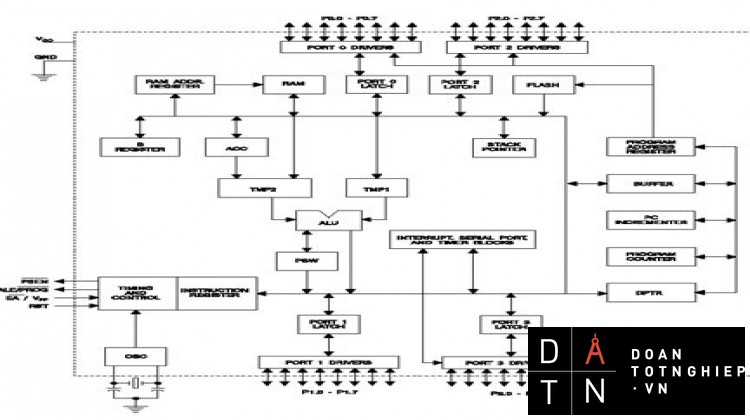
I. GIỚI THIỆU KHÁI QUÁT VỀ HỌ IC MCS-51TM 23
II. GIỚI THIỆU AT89C51 VÀ CÁCH KẾT NỐI ĐÃ SỬ DUNG TRONG MẠCH 24
1. Những đặc trưng của AT89C51 24
1.1. Mô tả chức năng của các chân và cách kết nối trong mạch đã sử dụng 25
1.2. Đặc trưng bộ dao động 27
2. Tổ chức bộ nhớ 27
2.1. RAM đa dụng 28
2.2. RAM địa chỉ hoá từng bit 29
2.3. Các bank thanh ghi 30
3. Các thanh ghi chức năng đặc biệt 30
3.1. Từ trạng thái chương trình 31
3.2. Thanh ghi B 32
3.3. Con trỏ ngăn xếp 32
3.4. Con trỏ dữ liệu 33
3.5. Các thanh ghi port xuất nhập 33
3.6. Các thanh ghi Timer 33
3.7. Các thanh ghi port nối tiếp 33
3.8 Các thanh ghi ngắt 33
3.9. Thanh ghi điều khiển công xuất 34
4. Bảo vệ bộ nhớ 34
5. Hoạt động của port nối tiếp 35
5.1. Giới thiệu 35
5.2. Thanh ghi điều khiển port nối tiếp 35
5.3. Các chế độ hoạt động 36
5.3.1. Thanh ghi dịch 8 bit (chế độ 0) 36
5.3.2. UART 8 bit với tốc độ baud thay đổi được (chế độ 1) 38
5.3.3. UART 9 bit với tốc độ baud cố định (chế độ 2) 39
5.3.4. UART 9 bit với tốc độ baud thay đổi được 39
5.4. Khởi động và truy xuất các thanh ghi cổng nối tiếp 40
5.4.1. Cho phép thu 40
5.4.2. Bit dữ liệu thứ 9 40
5.4.3. Thêm 1 bit parity 40
5.4.4. Các cờ ngắt 40
5.5. Tốc độ baud port nối tiếp 41
6. Các ngắt 43
6.1. Giới thiệu 43
6.2. Tổ chức ngắt của 8051/8031 44
6.2.1. Cho phép và cấm các ngắt 44
6.2.2. Ưu tiên ngắt 45
6.2.3. Hỏi vòng tuần tự 45
6.3. Xử lý ngắt 46
6.4. Thiết kế chương trình dùng ngắt 47
6.4.1. Các chương trình phục vụ ngắt có kích thước nhỏ 48
6.4.2. Các chương trình phục vụ ngắt có kích thước lớn 48
6.5. Các ngắt của 8051/8031 49
6.5.1. Các ngắt Timer 49
6.5.2. Các ngắt cổng nối tiếp 49
6.5.3. Các ngắt ngoài 49
6.6. Giản đồ thời gian khi xảy ra một ngắt 50
7. Chế độ chạy không (Idle) 51
8. Chế độ giảm công suất 51
9. Tập lệnh của AT89C51 51
8.1. Nhóm lệnh xử lý số học 52
8.2. Nhóm lệnh luận lý 52
8.3. Nhóm lệnh chuyển dữ liệu 53
8.4. Nhóm lệnh chuyển điều khiển 54
10. Các thông số tối đa 55
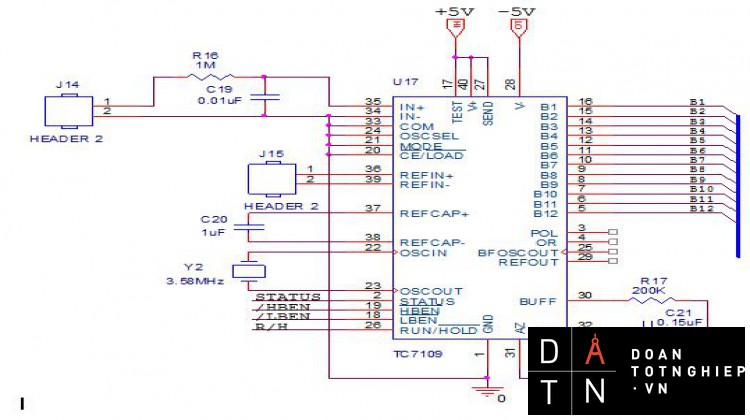
III. SỬ DỤNG BỘ BIẾN ĐỔI A/D 12 BIT TC7109 TRONG VIỆC THIẾT KẾ 55
1. Mô tả chức năng các chân và sử dụng trong việc thiết kế mạch 56
2. Tóm tắt những thông số thiết kế 58
3. Quá trình biến đổi A/D 58
IV. THIẾT KẾ CÁC KHỐI CHỨC NĂNG CHO MẠCH VI XỬ LÝ 62
1. Khối xử lý trung tâm 62
2. Khối biến đổi AD 67
3. Khối nút nhấn 70
4. Khối hiển thị 70
5. Bộ khuếch đại 73
6. Thiết kế bộ nguồn 74
V. GIẢI THÍCH CHƯƠNG TRÌNH VIẾT CHO VI XỬ LÝ AT89C51 DÙNG 77
TRONG MÔ HÌNH CÂN ĐIỆN TỬ
CHƯƠNG V: KẾT QUẢ THI CÔNG VÀ HƯỚNG 78
PHÁT TRIỂN CỦA ĐỀ TÀI
I. KẾT QUẢ THI CÔNG 78
II. HƯỚNG PHÁT TRIỂN CỦA ĐỀ TÀI 78
PHẦN BỐN: PHẦN PHỤC LỤC 81
I. GIỚI THIỆU CÁC IC SỬ DỤNG TRONG MẠCH 81
1. 74LS139 81
2. 74 LS04 81
3. 74LS373 81
4. LM336-5.0 82
II. CHƯƠNG TRÌNH VIẾT CHO VI XỬ LÝ AT89C51 83
Phần một: TỔNG QUAN VỀ HỆ THỐNG CÂN ĐIỆN TỬ
Chương I: HỆ THỐNG CÂN SỬ DỤNG LOADCELL VÀ ỨNG DỤNG
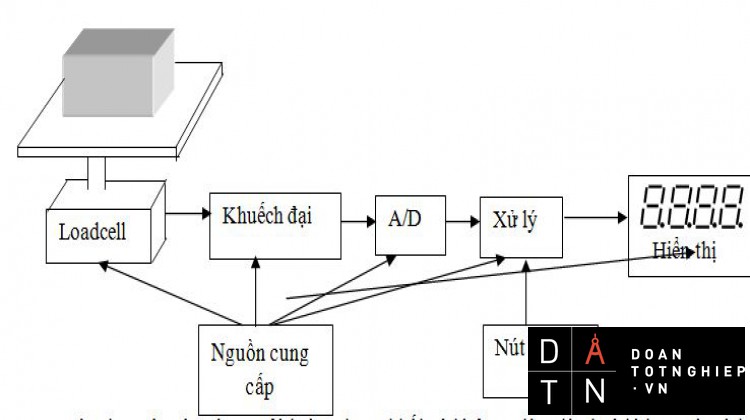
Sơ đồ khối của một hệ thống cân điện tử dùng loadcell như sau:
Tùy theo yêu câu và mục đích ứng dụng, khối xử lý được dùng là vi xử lý hay máy tính... Nếu bộ xử lý sử dụng vi xử lý thì có thể có thêm khối truyền dữ liệu về máy tính, có thể có khối in ấn hoặc không tuỳ mục đích sử dụng.
Dưới tác dụng của khối lượng đặt bên trên, loadcell sẽ chuyển thành tín hiệu điện ở ngõ ra. Tín hiệu điện rất nhỏ này được khuếch đại lên nhiều lần trước khi đưa vào bộ chuyển đổi A/D để chuyển thành tín hiệu số và được đưa về bộ xử lý để xử lý theo chương trình có sẵn và hiển thị hoặc có thêm việc in ấn. Bộ xử lý cần thiết phải có thêm bộ nhớ để lưu trữ số liệu, ví dụ trong việc chỉnh 0 và trừ bì của cân...
Do tính linh hoạt của bộ xử lý, tuỳ theo mục đích cụ thể mà chương trình viết cho bộ xử lý khác nhau. Do đó, hệ thống cân này có thể ứng dụng trong nhiều lĩnh vực có liên quan đến việc đo khối lượng. Ngoài ứng dụng trong việc cân, có thể kể ra các ví dụ khác mà dùng hệ thống cân điện tử sử dụng loadcell như sau:
* Trong hệ thống bán hàng có sử dụng cân điện tử loại này, việc tính tiền có thể được tự động hoàn toàn. Hàng ở đây là những loại có thể cân được, có thể là rau quả, thủy sản... Người sử dụng nhập vào bàn phím giá cả của một đơn vị cân và giá cả này có thể hiển thị ra màn hình hoặc Led 7 đoạn. Khi người dùng nhấn nút tính tiền trên bàn phím, bộ xử lý sẽ nhân giá trị cân được với giá của một đơn vị cân này và hiển thị ra giá cả đã được tính toán cho số hàng ấy. Sau khi để giá này hiển thị một khoảng thời gian vừa đủ cho người dùng đọc nó, hệ thống cân có thể sẽ hiển thị lại giá trị cân được. Giá tiền này có thể được lưu lại và nếu được nối đến máy tính của quầy thu tiền, khách hàng có thể nhận được bản báo cáo bao gồm trọng lượng cân được, giá cả của một đơn vị cân và tổng số tiền phải trả cho số hàng đó...
Cân cũng là một trong những biện pháp để phát hiện ra sản phẩm trong hệ thống đếm tự động. Khi phát hiện có khối lượng quy định thì mới đếm. Điều này sẽ tránh được việc đếm sai nếu cùng một lúc có hai sản phẩm hoặc vật thể khác không phải là sản phẩm che cảm biến quang.
Một ứng dụng khác của hệ thống cân này có thể kể ra là dùng trong bưu điện. Sau khi cân kiện hàng và xác định nơi cần gởi. Ngõ ra của hệ thống cân này thường được nối đến hệ thống in bưu phí lên nhãn dán vào kiện hàng gởi đi.
Ngoài ra ứng dụng phổ biến của cân điện tử đã được sử dụng nhiều trong các nhà máy ở nước ta là dùng trong việc đóng gói sản phẩm. Người dùng có thể nhập vào khối lượng cho một gói hàng hay bao gạo … khi đạt đến giá trị quy định này, ngõ ra của bộ xử lý có thể được dùng để điều khiển việc rót hàng hay dây chuyền để đóng gói sản phẩm,có thể là bằng cách kích các relay để làm đóng , mở các valve selenoid dùng khí nén....
Điều quan trọng trong các ứng dụng này là chương trình điều khiển viết cho bộ xử lý và cách giao tiếp với các thiết bị bên ngoài. Phần này thì khác nhau đối với các ứng dụng cụ thể khác nhau.
Nội dung của luận văn này đề cập đến hệ thống cân điện tử đã được sử dụng phổ biến ở nước ta.
Chương II: SƠ LƯỢC CÁC PHƯƠNG PHÁP VÀ CẢM BIẾN ĐƯỢC DÙNG TRONG ĐO KHỐI LƯỢNG
I . Các phương pháp đo khối lượng:
Trong vật lý cơ học, mối quan hệ giữa lực và khối lượng được xác định bằng định luật II Newton, mà theo đó lực tác dụng vào vật thể có khối lượng m sẽ bằng tích số khối lượng và gia tốc của nó, tức là:
F = ma (1)
Trọng lực là một trường hợp của công thức này. Dưới tác dụng của sức hút trái đất, vật có khối lượng sẽ chịu tác dụng của trọng lực P = m.g với g là gia tốc trọng trường là một số cố định ở từng khu vực. Các phương pháp đo khối lượng là dựa vào quan hệ này.
Công thức (1) không có nghĩa là không có lực trên vật thể nếu không có gia tốc mà nó chỉ có nghĩa là không có lực cân bằng thực. Hai lực cân bằng và đối nhau tác động lên một vật thể sẽ cân bằng, không tạo nên gia tốc. Có hai cách để tạo nên lực cân bằng: phương pháp cân bằng 0 và phương pháp dịch chuyển.
Cân bằng đòn cân là một ứng dụng của cảm biến lực cân bằng 0 vào việc đo khối lượng. Một khối lượng chưa biết được đặt trên đĩa cân. Các quả cân được hiệu chỉnh chính xác có kích thước khác nhau được đặt trên đĩa bên kia cho đến khi cân bằng. Khối lượng chưa biết bằng tổng khối lượng các quả cân đặt lên.
Cánh tay cân bằng còn được dùng trong việc đo khối lượng và được chế tạo để ít chịu sự thay đổi nhiệt độ ở hai đầu của tay đòn.
Thay đổi chiều dài l1 đến khi hệ thống cân bằng. Theo định luật moment hệ thống sẽ cân bằng khi: P1.l1 = P2.l2
Suy ra m1gl1 = m2gl2
Với g không đổi thì m1.l1 = m2.l2
Theo biểu thức trên, nếu các khoảng cách chiều dài và một khối lượng chuẩn đã biết sẽ suy ra khối lượng cần tìm.
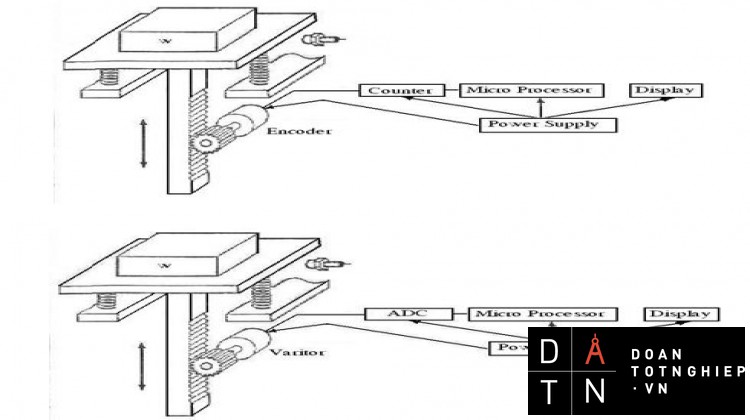
Cân đồng hồ lò xo thực tế là một ứng dụng đo khối lượng thông qua sự dịch chuyển dưới tác dụng của trọng lực do vật khối lượng m gây ra. Khối lượng chưa biết đặt trên giá cân treo trên lò xo đã được hiệu chỉnh. Lò xo di động cho đến khi lực đàn hồi của lò xo cân bằng với trọng trường tác động lên khối lượng chưa biết. Lượng di động của lò xo được dùng để đo khối lượng chưa biết. Ở các cân đồng hồ chỉ thị kim, lượng di động của lò xo sẽ làm kim quay thông qua một cơ cấu bánh răng với tỷ lệ hợp lý và góc quay của kim sẽ xác định khối lượng của vật cần cân.
Một cách khác có thể cân được vật là cấp nguồn DC cho biến trở xoay. Khi có khối lượng đè lên bàn cân, thông qua cơ cấu di chuyển thích hợp sẽ làm xoay biến trở và do đó điện áp lấy ra cũng thay đổi. Điện áp này được đưa về bộ chuyển đổi A/D và xử lý. Tuy nhiên khó khăn lớn nhất của phương pháp này là rất khó tìm biến trở tuyến tính. Ngoài ra còn có thể sử dụng một Encoder và bộ đếm để đếm số xung phát ra của encoder khi xoay bởi sự di chuyển này. Sơ đồ hai hệ thống cân loại này được vẽ như trong hình sau:
Cảm biến lực dùng trong việc đo khối lượng được sử dụng phổ biến là loadcell. Đây là một kiểu cảm biến lực biến dạng. Lực chưa biết tác động vào một bộ phận đàn hồi, lượng di động của bộ phận đàn hồi biến đổi thành tín hiệu điện tỷ lệ với lực chưa biết. Sau đây là giới thiệu về loại cảm biến này.
II. Giới thiệu về loadcell:
Bộ phận chính của loadcell là những tấm điện trở mỏng loại dán. Tấm điện trở là một phương tiện để biến đổi một biến dạng bé thành sự thay đổi tương ứng trong điện trở. Có hai loại điện trở dán dùng làm cảm biến lực dịch chuyển: loại liên kết (bonded) và loại không liên kết (unbonded).
Tấm điện trở liên kết dùng để đo độ biến dạng ở một vị trí xác định trên bề mặt của bộ phận đàn hồi. Điện trở này được dán trực tiếp vào điểm cần đo biến dạng của vật đàn hồi. Biến dạng này được truyền trực tiếp vào tấm điện trở và nó làm thay đổi giá trị điện trở tương ứng.
Cảm biến dùng điện trở loại không liên kết sử dụng để đo lượng di động nhỏ. Một lượng di động do mối liên kết bằng cơ khí tạo nên sẽ làm thay đổi điện trở làm cảm biến. Lượng di động cũng thường được tạo nên bằng lực tác động vào một bộ phận đàn hồi.
Vì thế tấm điện trở không liên kết sẽ đo toàn bộ lượng dịch chuyển của bộ phận đàn hồi còn tấm điện trở liên kết đó biến dạng tại một điểm xác định trên bề mặt của bộ phận đàn hồi.
Từ biểu thức , lấy vi phân hai vế, ta được:
Với S là diện tích tiết diện của dây dùng làm điện trở (D là đường kính dây) suy r , L là chiều dài của dây. Như vậy:
Ở đây là tỷ số thay đổi điện trở, là sự thay đổi chiều dài trên chiều dài của tấm điện trở, n là hằng số Poisson được tính bởi :
Dấu trừ “-” ở đây mang ý nghĩa là một vật khi bị biến dạng nếu tăng theo chiều dài thì sẽ giảm đi chiều ngang (ở đây là đường kính) và ngược lại.
Để có được ý nghĩa về so sánh phẩm chất, người ta còn định nghĩa độ nhạy của ứng suất là gage factor được tính bằng tỷ số của thay đổi điện trở và biến dạng như sau:
Thông thường các giá trị trên nằm trong khoảng G = 2 ¸ 4 ; L=0,5 ¸ 4 cm; R=50 ¸ 1000W.
Dựa vào các công thức tính ứng suất của bộ phận đàn hồi được xác định bằng tỷ lệ giữa lực (P) trên một đơn vị diện tích (A), tức là và modul đàn hồi là một hằng số xác định bởi tỷ số của ứng suất trên một lượng biến dạng (với e là biến dạng ) ta có thể xác định được quan hệ giữa sự thay đổi điện trở dưới tác dụng của lực P. Quan hệ này sẽ thay đổi tùy theo cách bố trí điện trở và hình dạng của bộ phận đàn hồi.
Trong các cách lấy tín hiệu ra từ cảm biến mang đặc tính tổng trở, mạch lấy tín hiệu ra tối ưu nhất là mạch cầu. Đây là một phương pháp để đo sự thay đổi nhỏ trong điện trở của một phần tử mà giá trị điện áp ra tỷ lệ với sự thay đổi của điện trở khi có khối lượng (hay lực) đặt vào cảm biến.
Hoạt động của mạch cầu có hai trường hợp : mạch cầu cân bằng và mạch cầu không cân bằng. Ở mạch cầu cân bằng điện trở của cảm biến được xác định từ giá trị ba điện trở đã biết trước. Ở cách đo không cân bằng, sự thay đổi điện trở cảm biến từ một giá trị cơ sở tạo nên một sự sai lệch nhỏ giữa hai điện áp của ngõ ra mạch cầu. Sử dụng bộ khuếch đại để khuếch đại sai lệch này lên để dễ dàng xử lý.
Điện trở cảm biến có thể được gắn vào một nhánh của mạch cầu Wheatstone không cân bằng như sau:
Các trị số điện trở R2, R3, R4 là cố định nên cầu sẽ cân bằng khi điện trở làm cảm biến là RS ở một trị số cơ sở xác định, ta gọi giá trị này là Rbal (balance). Liên hệ giữa giá trị R2, R3, R4 và Rbal khi cầu cân bằng là:
(1)
Mục đích của cầu không cân bằng là tạo ra một điện áp tỷ lệ với sự sai lệch giữa RS và Rbal. Để đơn giản hóa phương trình của cầu không cân bằng ta sử dụng hai hệ số e và a như sau:
Hệ số e là một phân số biểu thị sự sai lệch giữa RS và Rbal được định nghĩa là:
(100.e là phần trăm sai lệch giữa Rs và Rbal)
Hệ số thứ hai là a biểu thị tỷ lệ phân áp trên điện trở R3 được định nghĩa bởi:
Theo sơ đồ trên, điện áp tại hai điểm a, b là:
Do đó điện áp ngõ ra của mạch cầu:
Thay R2R3 = Rbal x R4 (từ (1)) và đơn giản biểu thức (2) ta được:
Để sử dụng các hệ số a và e ta nhân tử và mẫu của phân số này cho cùng một biểu thức sau
Khi đó (3) trở thành:
Và:
Để biểu thị biểu thức Jab theo tỷ lệ với RS - Rbal mà không còn RS, ta cộng và trừ ở mẫu số của phân số cuối cho Rbal.R3 (ở cùng tử số).
Và như vậy điện áp ngõ ra Jab thay đổi theo sai lệch điện trở của cảm biến gây ra bởi khối lượng (hay lực) tác dụng lên.
Ngoài ra nếu nguồn Vdc cung cấp có nhiễu một lượng DJ thì theo nguyên lý xếp chồng và cách tính tương tự như trên, ta được biểu thức:
Trong đó có phụ thuộc vào tích DJ.(RS – Rbal) = DJ.DR là thành phần rất nhỏ so với DR. Do đó có thể bỏ qua được nhiễu DJ.
Có các cách kết nối điện trở cảm biến trên các nhánh cầu khác như sau (Rs là điện trở cảm biến):
Cách dùng bốn cảm biến bố trí trên 4 nhánh cầu được ứng dụng rộng rãi trong các loadcell thực tế. Thông thường 4 cảm biến này được bố trí trên hai mặt của loadcell, và như vậy sẽ có hai cảm biến điện trở bị dãn ra và 2 cảm biến điện trở sẽ co lại khi có lực tác dụng. Do đó ta có quan hệ sau:
Sự thay đổi của điện áp ra theo biến dạng của các điện trở này có thể được tính như sau: Hình a
Hai điện trở R1 và R2 thường được dùng trong mục đích cộng các tín hiệu từ các loadcell lại với nhau, Rl là tải.
Sơ đồ tương đương Thevenin cho mạch trên được vẽ như sau:
Ở đây R0 là tổng trở ra của loadcell.
Theo hình (a) ta có:
Va = I.R2 + (R + DR).I/2
Vb = I.R2 + (R - DR).I/2
Điện áp ra sẽ là:
V0 = Va – Vb = DR. I
Hay:
Vì thế điện áp ngõ ra sẽ thay đổi theo sự thay đổi giá trị của các điện trở này.
Để tính tổng trở ra cuả loadcell ta ngắn mạch nguồn áp cung cấp V, khi đó mạch trở thành:
Áp dụng định luật Kirchoff cho ba vòng kín như hình vẽ, ta có:
( R-DR).I1 + (R +DR).( I1 – I2) = V0 (1)
(R - DR).I1 + (R1+R2) I2 –(R + DR).(I0 –I1)=0 (2)
(R+ DR).(I0 – I1) + (R - DR).(I0 – I1 + I2) =V0 (3)
(2) + (3) Þ (R1 + R2 + R -DR).I2 + (R-DR).I0 = V0 (4)
(1) + (3) Þ (R - DR).I2 – (R +DR).I2 +2.R.I0 =2.V0
Û - DR.I2 + R.I0 =V0
Û . Thay vào (4) ta suy ra:
Û ( R1+ R2+ R - DR).(R.I0 –V0) + DR.( R - DR).I0 = DR.V0
Û I0 .[( R1 +R2 + R + R -DR).R + DR.( R - DR) ]= V0 ( DR +R1 + R2 +R -DR)
Û I0. [ (R1 +R2 +R ).R - DR2 ] = V0. [R1+R2+R]
Suy ra:
Đây chính là tổng trở ra của loadcell.
Như vậy điện áp rơi trên tải RL là:
Từ biểu thức trên ta có thể nhận thấy là điện áp ra VL không thay đổi tuyến tính theo sự thay đổi của điện trở cảm biến . Hệ thống làm tuyến tính hoá sự thay đổi này thì do nhà sản xuất thiết kế.
1. Lý thuyết về load cell:
Cảm biến lực dùng trong việc đo khối lượng được sử dụng phổ biến là loadcell. Đây là một kiểu cảm biến lực biến dạng. Lực chưa biết tác động vào một bộ phận đàn hồi, lượng di động của bộ phận đàn hồi biến đổi thành tín hiệu điện tỷ lệ với lực chưa biết. Sau đây là giới thiệu về loại cảm biến này.
Bộ phận chính của loadcell là những tấm điện trở mỏng loại dán. Tấm điện trở là một phương tiện để biến đổi một biến dạng nhỏ thành sự thay đổi tương ứng trong điện trở. Một mạch đo dùng các miếng biến dạng sẽ cho phép thu được một tín hiệu điện tỷ lệ với mức độ thay đổi của điện trở. Mạch thông dụng nhất sử dụng trong loadcell là cầu Wheatstone.
Nguyên lý :
Cầu Wheatstone là mạch được chọn dùng nhiều nhất cho việc đo những biến thiên điện trở nhỏ (tối đa là 10%), chẳng hạn như việc dùng các miếng đo biến dạng. Phần lớn các thiết bị đo đạc có sẵn trên thị trường đều không ít thì nhiều dùng phiên bản của cầu Wheatstone đã được sàng lọc. Như vậy, việc tìm hiểu nguyên lý cơ bản của loại mạch này là một điều cần thiết.
Cho một mạch gồm bốn điện trở giống nhau R1, R2, R3, R4 tạo thành cầu Wheatstone như trên hình trên. Đối với cầu Wheatstone này, bỏ qua những số hạng bậc cao, hiệu thế đầu ra Em thông qua thiết bị đo với trở kháng Zm sẽ là:
Với: là biến đổi đơn vị của mỗi điện trở Ri
R là điện trở danh nghĩa ban đầu của các điện trở R1, R2, R3, R4 (thường là 120 ohms, nhưng có thể là 350 ohms dành cho các bộ cảm biến ).
V là hiệu thế nguồn.
Điện thế nguồn có thể thuộc loại liên tục với điều kiện là dùng một nguồn năng lượng cung cấp thật ổn định. Các thiết bị trên thị trường đôi khi lại dùng nguồn cung cấp xoay chiều. Trong trường hợp đó phải tính đến việc sửa đổi mạch cơ bản để có thể giải điều chế thành phần xoay chiều của tín hiệu.
Trong phần lớn các trường hợp, Zm rất lớn so với R (Ví dụ như Volt kế số, bộ khuếch đại với phần nối trực tiếp ) nên biểu thức trên có thể viết lại là:
Phương trình trên cho thấy là sự biến đổi đơn vị điện trở của hai điện trở đối mặt nhau, ví dụ là R1 và R3, sẽ là cộng lại với nhau trong khi tác động của hai điện trở kề bên nhau ,ví dụ là R1 và R2, lại là trừ khử nhau. Đặc tính này của cầu Wheatstone thường được dùng để bảo đảm tính ổn định nhiệt của các mạch miếng đo và cũng để dùng cho các thiết kế đặc biệt.
2. Một số Loadcell thực tế:
Có nhiều loại loadcell do các hãng sản xuất khác nhau như KUBOTA (của Nhật), Global Weighing (Hàn Quốc), Transducer Techniques. Inc, Tedea – Huntleigh... Mỗi loại loadcell được chế tạo cho một yêu cầu riêng biệt theo tải trọng chịu đựng, chịu lực kéo hay nén. Tùy hãng sản xuất mà các đầu dây ra của loadcell có màu sắc khác nhau. Có thể kể ra như sau:
|
Các màu sắc này đều được cho trong bảng thông số kỹ thuật khi mua từng loại loadcell.
Trong thực tế còn có loại load cell sử dụng kỹ thuật 6 dây cho ra 6 đầu dây. Sơ đồ nối dây của loại load cell này có thể có hai dạng như sau:
Hình: Dạng nối dây
Hình: Dạng nối dây 2
Như vậy, thực chất load cell cho ra 6 dây nhưng bản chất vẫn là 4 dây vì ở cả hai cách nối ta tìm hiểu ở trên thì các dây +veInput (Exc+) và +veSense (Sense+) là nối tắt, các dây -veInput (Exc-) và -veSense (Sense-) là nối tắt.
Có nhiều kiểu hình dạng loadcell cho những ứng dụng khác nhau. Do đó cách kết nối loadcell vào hệ thống cũng khác nhau trong từng trường hợp.
Thông số kỹ thuật của từng loại loadcell được cho trong catalogue của mỗi loadcell và thường có các thông số như : tải trọng danh định, điện áp ra danh định ( giá trị này có thể là từ 2 miliVolt/Volt đến 3 miliVolt/Volt hoặc hơn tùy loại loadcell), tầm nhiệt độ hoạt động, điện áp cung cấp, điện trở ngõ ra, mức độ chịu được quá tải... (Với giá trị điện áp ra danh định là 2 miliVolt/Volt thì với nguồn cung cấp là 10 Volt thì điện áp ra sẽ là 20 miliVolt ứng với khối lượng tối đa.)
Tùy ứng dụng cụ thể mà cách chọn loại loadcell có thông số và hình dạng khác nhau. Hình dạng loadcell có thể đặt cho nhà sản xuất theo yêu cầu ứng dụng riêng. Sau đây là hình dạng của một số loại loadcell có trong thực tế.
3. Giới thiệu loadcell sử dụng trong luận án này: GB/T7551-1997
Load cell GB/T7551-1997 do công ty Shen Zhen Sheng Wan Jiang (China) sản xuất. Hình ảnh load cell như sau:
Sau đây là bảng các đặc tính kỹ thuật của load cell GB/T7551-1997 (Thông tin được download về từ Website : http://www.swjchina.com.cn):
GB/T7551-1997 SPECIFICATIONS:
Rated Output S 1.9688 mV/V
Linearity L £0.02 %F.S
Hysteresis H £0.02 %F.S
Repeatability R £0.02 %F.S
Zero Balance Z ±2 %F.S
Temperature Effect On Zero Zt £0.025 %F.S/10°C
Temperature Effect On Output St £0.025 %F.S/10°C
Creep(30min) Cp £0.03 %F.S/30min
Corner Error E ±1 mV
Input lmpedance 1100 ± 30W 410 ± 10W
Output lmpedance (1000 ± 5W) 350 ± 3W
Insulation ³2000MW 50(500) V (DC)
Temperature Range -10°C +40°C
Safe Overload 150%
Ultimate Overload 200%
Input End Red+ Black (Blue)-
Output End Green+ White-
Test Instrument UMC600
Force Testing Equipment Actual Load
Excitation Voltage 10V(DC)
Chương III: GIỚI THIỆU MỘT BỘ HIỂN THỊ KHỐI LƯỢNG CỤ THỂ VÀ CÁCH CÂN CHỈNH CHO ĐẦU CÂN THỰC TẾ
Phần này giới thiệu sơ lược một bộ hiển thị khối lượng (Weighing Indicator) cụ thể là A/D – 4323 được sản xuất bởi A&D Company, Limited của Nhật và cách cân chỉnh cho một đầu cân thực tế. Cùng họ với bộ hiển thị (hay còn gọi là đầu cân) này là A/D – 4321 đã được sử dụng tại nhà máy MOBIL UNIQUE VIETNAM do Công ty Encorp Co, LTD của Thái Lan lắp đặt. Tuy không phải là loại được sử dụng phổ biến nhưng ở đây chỉ muốn giới thiệu một đầu cân điển hình và cách cân chỉnh khi lắp đặt cũng như sửa chữa.
*Đầu cân này có các đặc điểm như sau:
Sử dụng bộ biến đổi A/D tốc độ nhanh đến 70 lần trong một giây. Vì vậy A/D – 4323 thích hợp cho việc tĩnh và cả việc cân động.
Bộ biến đổi A/D có độ phân giải cao và chính xác.
Dễ dàng cân chỉnh bằng chức năng FDC (Full Digital Compensation).
Có những lựa chọn thuận tiện cho việc giao tiếp với thiết bị bên ngoài như máy in, máy tính, bộ hiển thị từ xa... trong việc truyền dữ liệu song song mã BCD hay nối tiếp theo chuẩn RS – 232C.
Màn hình hiển thị huỳnh quang màu xanh loại lớn dễ dàng nhìn thấy trong bất kỳ điều kiện ánh sáng nào.
Ngoài ra A/D-4323 còn cung cấp các lựa chọn (Option) cho các ứng dụng khác.
Nút này dùng để chuyển đổi qua lại giữa hai chế độ STANDBY và OPERATE. Ở chế độ STANDBY, màn hình hiển thị sẽ tắt và không có dữ liệu xuất ra.
Khi nhấn nút này thì sẽ hiển thị Zero khi không có thiết bị cần cân. Không nên nhấn nút này với chức năng TARE của đầu cân.
Nút TARE dùng để chuyển sang chế độ NET, số 0 được hiển thị và khối lượng cần trừ bì sẽ được lưư vào bộ nhớ. Dấu TARE ENTERER sẽ sáng.
Nút này dùng để lựa chọn một trong hai chế độ NET và GROSS. Dấu sẽ sáng tương ứng với chế độ được chọn. Chế độ NET là khối lượng ròng sau khi trừ bì (đã được lưu vào sau khi nhấn TARE) và GROSS là khối lượng tổng cộng bao gồm cả bì cân.
Nút Print được dùng trong việc truyền tới máy in (nếu sử dụng OP-01) hay truyền nối tiếp theo chuẩn RS – 232C đến máy tính.
Các đèn báo 1b ¥ sẽ sáng khi dùng đơn vị cân là Pound (chỉ có ở Mỹ), đèn Kg ¥, t ¥ sẽ sáng nếu sử dụng đơn vị cân là Kg hay tấn tương ứng.
* Các thông số kỹ thuật:
Ngõ vào Analog và sự biến đổi A/D:
- Độ nhạy ngõ vào: Đến 0,6 mV/D (D là độ chia nhỏ nhất min.division).
- Tầm chỉnh Zero: 0,35 mV ~ 24 mV.
- Điện áp vào lớn từ loadcell: 36mV.
- Điện áp cấp cho loadcell: 12 Volt DC ± 5%, 280 mA.
- Độ không tuyến tính: 0,01% toàn tầm.
- Nhiều ngõ vào: ± 0,3 mV đỉnh – đỉnh.
- Tổng trở nhập: 10 MW
- Phương pháp biến đổi A/D: tích phân 2 độ dốc.
- Độ phân giải: 1/ 96000.
- Tỷ lệ biến đổi: xấp xỉ 70 lần/giây (14 mgiây /1 lần chuyển đổi).
* Các thông số khác:
- Số hiển thị tối đa: 500450.
- Điện áp sử dụng: 100, 115, 220, 240 Volt AC +10%, -15% 50/60 Hz.
- Nhiệt độ hoạt động: -5°C đến 40°C.
- Nguồn pin nuôi bộ nhớ có thể hoạt động trong 6 năm hoặc hơn nếu không có cấp điện cho A/D-4323.
Ngoài ra A/D-4323 còn cung cấp khá nhiều chức năng hữu ích. Sau đây là một số chức năng thông dụng:
- F 01: Điều chỉnh dấu chấm thập phân. Có thể cho hiển thị 1, 2, 3 hay 4 số sau dấu chấm.
- F 02: Chọn lựa đơn vị cân.
- F 03: Cập nhật việc hiển thị: 14 lần/ giây hay 4 lần/ giây.
- F 05: Đặt tầm chỉnh Zero: 2% hay 10% khối lượng tối đa.
- F 10: Chỉnh độ rộng xung tín hiệu FINISH: 0,1 giây ® 0,2 giây.
- Lựa chọn OP – 01 cho dữ liệu là mã BCD.
- F 31: Dữ liệu xuất ra là số hiển thị, trọng lượng ròng hay trọng lượng kể cả bì cân.
- F 32: Cách thức xuất dữ liệu: chuỗi, tự động in .
- Lựa chọn OP – 04 : cho giao tiếp nối tiếp.
- F 41: Tốc độ Baud: 600, 1200, 2400, 4800, 9600.
- F 42: Dữ liệu xuất ra là: số hiển thị , GROSS, NET, TARE …
* Giải thích cách chỉnh cân:
- Chỉnh độ phân giải: Khối lượng hiển thị lên màn hình thì dựa vào độ phân giải này. Đây là khoảng thay đổi nhỏ nhất mà thiết bị có thể nhận biết được. Ví dụ nếu đặt độ phân giải nhỏ nhất là 1 thì thiết bị sẽ hiển thị cách nhau 1 đơn vị như là 101, 102, 103…. Nếu độ phân giải nhỏ nhất là 2 thì sẽ hiển thị 100, 102, 104… Có thể lựa chọn độ phân giải này là 1, 2, 5, 10, 20 hay 50 và được giới hạn theo khối lượng tối đa được cho trong catalogue của A/D-4323.
- Chỉnh Zero: Đây là cách chỉnh khi trên bàn không có vật cần cân. Thực hiện việc này là để A/D-4323 biết được một giá trị cơ sở để so sánh với khối lượng thêm vào. Có thể phải chỉnh Zero theo một chương trình thường xuyên để tránh ảnh hưởng của việc thay đổi theo nhiệt độ hay các ảnh hưởng khác.
- Khối lượng tối đa: Đây là cách chỉnh khối lượng lớn nhất mà người sử dụng muốn cân. Điều này phụ thuộc vào tải trọng của loadcell hay là những giới hạn khác mà người dùng đặt. Độ phân giải sẽ phụ thuộc vào khối lượng lớn nhất này.
- Cân chỉnh bước cân (Span Calibration): Với việc chỉnh Zero nhằm mục đích đặt giá trị ban đầu là không, cân chỉnh bước cân là xác định điểm giới hạn mà có thể cân được( khối lượng lớn nhất). Điều này là để cho A/D-4232 biết hai đầu mút mà có thể cân được chính xác. A/D-4232 sẽ tính toán giá trị cân được nếu khối lượng cần cân nằm trong hai giới hạn này. Tuy nhiên trong thực tế, có thể dùng các khối lượng chuẩn để cân chỉnh cho việc này mà không nhất thiết phải dùng khối lượng tối đa (nhưng khối lượng chuẩn càng gần giới hạn lớn nhất thì cho kết quả càng chính xác).
Sở dĩ cần cân chỉnh Zero là để A/D đọc giá trị sai lệch điện áp ban đầu khi không có vật gì ở trên bàn cân. Chỉnh bước cân là cho A/D biết được giá trị điện áp ứng với một khối lượng chuẩn đặt lên bàn cân . Từ đó, bộ xử lý sẽ lấy hiệu số hai giá trị điện áp này và chia khối lượng chuẩn để ra một hệ số tương ứng cho mỗi đơn vị cân và lưu các giá trị này vào bộ nhớ. Khi có khối lượng cần cân, bộ xử lý sẽ đọc giá trị điện áp và trừ đi điện áp ở trạng thái Zero rối chia cho hệ số đã lưu trước đó sẽ ra được khối lượng cần cân.
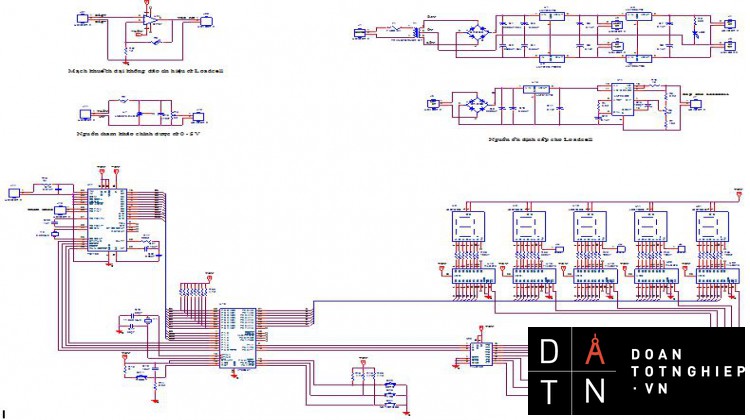
Ngoài ra, khi cần chỉnh cho đầu cân nếu điện áp ngõ ra loadcell quá lớn lúc chỉnh Zero thì thêm một điện trở giữa EXC+ và SIG - của Loadcell như hình (1). Hoặc ngược lại nếu tín hiệu ra của Loadcell quá nhỏ (lệch âm) khi cân chỉnh Zero thì trong trường hợp này phải mắc thêm một điện trở phụ giữa EXC+ và SIG + như trong hình vẽ (2).
Các điện trở mắc thêm này phải có giá trị điện trở lớn (thường là từ 50KW đến 500KW; có chất lượng cao và có hệ số nhiệt thấp. Các lỗi khi cân chỉnh trên đây và một số lỗi khác sẽ được báo lên màn hình và cách xử lý đã được hướng dẫn trong “Introduction Manual” của A/D-4232.
................................................................................................................
Mạch điện được thiết kế với 4 nút nhấn, 1 nút dùng để reset mạch vi xử lý, 3 nút còn lại dùng làm các chức năng cho đầu cân. Ví dụ như ZERO, TARE, NETWEIGH … Các nút này được nối vào P3.3, P3.6, P3.7 của AT89C51. Khi chưa nhấn nút, các chân này là mức 1, nếu 1 nút được nhấn, chân tương ứng sẽ ở mức 0. Dựa vào trạng thái các nút này mà xử lý cho thích hợp.
4. Khối hiển thị:
Khối hiển thị bao gồm 5 đèn Led 7 đoạn để hiển thị khối lượng cân được cũng như trạng thái hoạt động của mạch.
Hiển thị ra đèn Led có thể sử dụng một trong hai phương pháp quét hoặc chốt. Do sở thích và cũng nhằm mục đích để chương trình viết đơn giản, ở đây sử dụng phương pháp chốt. Tuy rằng phương pháp này không kinh tế lắm vì mỗi đèn Led phải có một IC chốt và 7 điện trở nhưng việc lập trình đơn giản hơn.
Việc chọn Led để xuất ra thông qua IC giải mã 74LS138. Các chân A, B, C của IC này được nối vào P1.7, P3.4, P3.5 tương ứng của AT89C51. Khi cần hiển thị ở Led nào chỉ việc xuất các giá trị thích hợp theo bảng chân trị sau:
|
INPUTS |
OUTPUTS |
||||||||||||
|
Enable |
Select |
||||||||||||
|
G1 |
G2A |
G2B |
C |
B |
A |
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
Y5 |
Y6 |
Y7 |
|
0 |
X |
X |
X |
X |
X |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
1 |
1 |
X |
X |
X |
X |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
1 |
X |
1 |
X |
X |
X |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
1 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
|
1 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
|
1 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
|
1 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
|
1 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
1 |
1 |
|
1 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
1 |
|
1 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
Do cách kêt nối G2A, G2B xuống mass, G1 được kéo lên nguồng +5Volt trùng với mức tích cực của nó nên các giá trị cần thiết xuất ra P1.7, P3.4, P3.5 để xuất ra Led 7 đoạn tương ứng sẽ là:
Chọn Led 7 đoạn P3.5 P3.4 P1.7
Led 0 0 0 0
Led 1 0 0 1
Led 2 0 1 0
Led 3 0 1 1
Led 4 1 0 0
Hoạt động của IC chốt 74LS373 theo bảng chân trị sau:
|
Control Output |
Enable |
Output |
|
|
OC |
G |
D |
|
|
1 |
X |
X |
HiZ |
|
0 |
1 |
0 |
0 |
|
0 |
1 |
1 |
1 |
|
0 |
0 |
X |
Qi(n-1) |
Theo bảng chân trị của IC 74LS373 ta nhận thấy: Nếu chân OC ở mức 0, và chân G ở mức thấp dữ liệu sẽ được chốt. Khi chân G lên mức cao thì dữ liệu sẽ được cho qua. Chân OC khi ở mức cao thì ngõ ra sẽ ở trạng thái tổng trở cao HiZ
Theo sơ đồ đã kết nối, chân OC đã được nối xuống mass. Do đó, khi cần xuất dữ liệu ra ta phải cho chân G lên mức cao và khi muốn chốt phải cho chân này xuống mức thấp. Sơ đồ của khối hiển thị được vẽ như sau:
Dữ liệu xuất qua 74LS138 là mã Led 7 đoạn được xuất ra Port 2 của AT89C51. Trong ngõ ra của IC giải mã 74LS138 nếu Led được chọn là mức thấp, nhưng để dữ liệu xuất ra thì chân G của 74LS138 lại là mức cao nên các ngõ ra chọn Led của 74LS138 được nối qua cổng NOT của IC 74LS04. Ngõ ra các cổng NOT này được nối và chân G của 74LS373. Khi Led 7 đoạn nào được chọn, ngõ ra tương ứng của 74LS138 sẽ là mức 0, qua cổng NOT sẽ lên mức 1. Cho nên chân G của 74LS373 cũng ở mức 1. Khi đó dữ liệu là mã Led 7 đoạn được xuất ra đèn Led sẽ kích các đoạn của đèn Led sáng theo các số cần xuất. Nếu cần chốt giá trị này ta chỉ việc làm cho ngõ ra của 74LS138 không tích cực tức là ở mức cao. Khi đó chân G của 74LS373 sẽ ở mức 0 vì đã qua cổng NOT, hoạt động đúng như bảng chân trị của 74LS373.
Do đèn Led sử dụng ở đây là loại Anode chung nhưng để đèn sáng thì dữ liệu xuất ra phải ở mức 0.
Sơ đồ chân Led 7 đoạn như sau:
Ngoài ra để biết chức năng mà đầu cân đang hoạt động, mạch còn được thiết kế để hiển thị ra các Led đơn khi nhấn nút. Các led đơn này cũng được nối đến ngõ ra của IC giải mã 74LS138. Chương trình sẽ xuất ra các chân P1.7, P3.4, P3.5 những giá trị thích hợp để làm Led sáng khi nút tương ứng được nhấn.
Việc hiển thị dấu chấm thập phân có thể được lựa chọn bằng phần cứng. Ngõ vào các dấu chấm này được nối ra một jack để khi muốn hiển thị dấu chấm của đèn Led nào thì chỉ việc cắm dây vào đây, đầu còn lại của dây được nối xuống mass.
5. Bộ khuếch đại:
Như đã trình bày ở trước, có các cách khuếch đại tín hiệu sử dụng op – amp khác nhau nhưng ở đây chỉ sử dụng mạch khuếch đại dùng 1 op – amp. Thực hiện như vậy là nhằm mục đích tránh điện áp offset. Vì nếu dùng nhiều op – amp thì độ lệch này càng nhiều.Sơ đồ mạch khuếch đại như sau:
Mạch khuếch đại không đảo tín hiệu từ Loadcell
Ở mạch có hệ số khuếch đại cố định, với các giá trị điện trở đã chọn thì khuếch đại là:
lần
Khi đó điện áp toàn tầm ngõ vào là 201 x 20 mV = 4,020 Volt (tỷ lệ điện áp ra của Loadcell là 20mV/ Volt). Chọn hệ số khuếch đại như vậy thì sẽ cho điện áp toàn tầm thỏa mãn yêu cầu ngõ vào A/D.
6. Thiết kế bộ nguồn:
Ở các đầu cân thực tế người ta thường dùng bộ nguồn switching nên có độ chính xác và ổn định rất cao. Tuy nhiên để thiết kế bộ nguồn hoạt động tốt theo kiểu đó thì phức tạp vả lại linh kiện rất khó tìm, bộ nguồn ở đây được thiết kế theo kiểu thông thường.
Bộ nguồn được thiết kế với nhiều mức điện áp cho các ứng dụng khác nhau: +5Volt cung cấp cho hoạt động của tất cả các IC, nguồn –5Volt cung cấp cho chân V- của A/D TC7109; nguồn ±12Volt cung cấp cho bộ khuếch đại sử dụng op – amp OP - 07; nguồn 10Volt ổn định cấp cho Loadcell. Riêng nguồn chuẩn làm điện áp tham khảo cấp cho A/D được thiết kế ở điện áp c thay đổi được là từ 0 đến 5Volt nhằm mục đích chỉnh theo ngõ vào của tín hiệu cần biến đổi A/D. Có nhiều IC ổn áp làm nguồn tham khảo rất tốt, tuy nhiên rất khó tìm. Ở đây sử dụng các IC cho chất lượng có thể chấp nhận được.
Sơ đồ bộ nguồn như sau:
Nguồn tham khảo thay đổi được từ 0-5V
* Bộ nguồn được thiết kế gồm những phần riêng biệt như sau:
- Khối ±12Volt cung cấp cho op – amp sử dụng IC ổn áp LM7812 và LM7912. Đây là họ IC ổn áp dùng cho nhiều ứng dụng khác nhau. Sử dụng tản nhiệt phù hợp sẽ cho dòng ra có thể vượt quá 1 Ampere. Mặc dù được chế tạo để ổn định điện áp nhưng họ IC 78xx có thể thêm các linh kiện bên ngoài để điều chỉnh được điện áp và dòng điện ở ngõ ra. Bên trong họ IC cũng có bảo vệ quá nhiệt và ngắn mạch. Sai lệch điện áp ngõ ra là từ 2% đến 4%. Tụ C1 2200mF là để tránh nhấp nhô điện áp như trong các chỉnh lưu thông thường. Tụ C2 0,33mF phải cần thiết khi nguồn cung cấp ở xa. Tụ C3 0,1mF thì không phải để ổn định điện áp mà chỉ làm tăng đáp ứng quá độ.
- Khối ±5Volt sử dụng 2 IC ổn áp LM7805, LM7905 dùng làm nguồn nuôi cho tất cả các IC trong mạch vi xử lý. Điện áp ngõ vào LM7805, LM7905 được lấy từ nguồn ±12Volt đã ổn định trước đó. Điện áp vào IC LM7805 theo catalogue là có thể từ 7Volt đến 20Volt DC.
- Một yêu cầu cần thiết cho điện áp làm nguồn tham khảo cho A/D TC7109 là phải ổn định và chính xác. IC ổn áp dùng làm nguồn tham khảo là LM336. Ở đây LM336 sẽ cho điện áp chỉnh được từ 0¸5Volt bằng cách dùng biến trở tinh chỉnh bên ngoài. Sở dĩ ở đây dùng nguồn chuẩn có thể chỉnh được là vì tín hiệu dùng để biến đổi A/D có điện áp toàn tầm thay đổi theo từng loại Loadcell sao cho phù hợp biểu thức:
- Điện áp ngõ vào của LM336 loại ổn áp 5Volt là 12Volt cũng được lấy từ nguồn 12Volt ở trên.
- Điện áp cấp cho Loadcell được thiết kế sử dụng LM723 nhằm mục đích làm tăng tính ổn định vì tín hiệu ra của Loadcell rất nhỏ nên dễ bị ảnh hưởng nếu nguồn không ổn định.
LM723CN là IC có thể dùng để ổn áp dương hay ổn áp âm với dòng điện ra đạt tới 150mili Ampere DC. Dòng điện ngõ ra có thể làm tăng lên vài Ampere nếu dùng một hay nhiều transistor mắc bên ngoài. Tầm nhiệt độ sử dụng cho IC loại thương mại là từ 0¸70°C. LM723CN có các đặc điểm chủ yếu như sau :
- Điện áp ngõ ra có thể chỉnh được từ 2Volt đến 37Volt DC tùy theo cách mắc.
- Dòng điện ngõ ra đạt tới 150mili Ampere nếu không sử dụng Transistor mắc thêm bên ngoài.
- Có thể chỉnh được dòng điện bảo vệ ngắn mạch.
- Độ ổn định 0,01% Vout , thay đổi theo tải là 0,03%Vout (nếu dòng tải 1mA < IL < 50mA. Sai số tối đa là 0,3% và 0,6% tương ứng. Như vậy nếu muốn ổn định ở 10Volt thì có thể mắc sai số lớn nhất là 0,06Volt.
Thông số cần thiết khi thiết kế :
- Tầm điện áp ngõ vào Vin: 9,5 Volt DC đến 40 Volt DC.
- Tầm điện áp ngõ ra Vo: 2,0 Volt đến 37 Volt.
- Sai lệch điện áp vào ra trong khoảng từ 3Volt đến 38 Volt.
- Hệ số nhiệt độ trung bình của điện áp ngõ ra là 0,002% / °C.
- Độ dợn sóng (ở tần số từ 50Hz đến 10KHz) là: 86 dB nếu Cref là 5mF và 74 dB nếu Cref = 0.
- Dòng giới hạn ngắn mạch ISC là 65mA DC.
- Độ ổn định trong chế độ dài hạn: là 1%/ 1000 giờ .
Các thông số trên chỉ đúng khi nhiệt độ từ 0°C đến 70°C.
Theo cách mắc linh kiện bên ngoài như trong sơ đồ thì dòng ngắn mạch là: Ampere
Cách kết nối tiêu biểu cho điện áp ra từ 7 Volt đến 37 Volt như sau:
Từ biểu thức tính điện áp ngõ ra cho bởi Catalogue:
Ta suy ra: . Để tạo được điện áp ngõ ra là 10 Volt thì tỷ số . Ngoài ra để cho kết quả tốt nhất, theo khuyến cáo giá trị điện trở R2 phải nằm trong khoảng từ 10 KW đến 100 KW. Do đó giá trị được chọn ở đây là R1 = 8,2 KW, R2 là 18 KW và giữa chúng có mắc một biến trở 5KW để chỉnh cho phù hợp với tỷ lệ trên.
Nhằm mục đích làm cho độ trôi nhỏ, theo hướng dẫn thì giá trị R3 = R1//R2 nên ở đây chọn R3 = 5,6 KW. Đây là những giá trị điện trở có trong thực tế.
Ngoài ra do trong mạch có sử dụng đèn Led có dòng lớn nên bộ nguồn còn được thiết kế có nguồn 5Volt riêng để cấp cho Led nhằm tránh quá dòng cho các IC ổn áp.
V. GIẢI THÍCH CHƯƠNG TRÌNH VIẾT CHO VI XỬ LÝ AT89C51 DÙNG TRONG MÔ HÌNH CÂN ĐIỆN TỬ:
Do mô hình được thiết kế để cân khối lượng có thể đạt được đến 350 kg nên ta chỉnh hệ số khuếch đại sao cho giá trị A/D đọc được không vượt quá 4.096 Volt ứng với khối lượng tối đa 350 kg. Vì AD là 12 bit có giá trị tối đa đọc được là 212 = 4096 và cách chọn điện áp chuẩn là 2.048 Volt nên giá trị A/D đọc được chính là giá trị điện áp tính bằng miliVolt. Việc lấy giá trị nhỏ hơn 4096 miliVolt này là để tránh vượt mức điện áp ngõ vào A/D ( Điện áp toàn tầm ngõ vào A/D gấp đôi giá trị điện áp chuẩn) .
Để bộ hiển thị chỉ 0 khi không có khối lượng đặt trên bàn cân thì ta cần phải lưu giá trị A/D đọc được do sai lệch điện áp gây bởi khối lượng của bàn cân đặt lên Loadcell và khi có vật cần cân thì cần phải trừ đi giá trị này thì mới hiển thị đúng khối lượng cần cân. Đây cũng chính là chức năng của nút nhấn “Auto Zero” đã được thiết kế trên mạch. Khi có khối lượng cần cân thì vi xử lý sẽ đọc giá trị điện áp và trừ đi điện áp ở trạng thái Zero, và ta chỉ việc nhân hiệu số này cho 2 và chọn số lẻ sau dấu thập phân khi xuất Led. Sở dĩ nhân cho 2 là để tránh thực hiện phép chia cho vi xử lý khi viết chương trình xử lý các số lẻ sau dấu chấm thập phân khi xuất ra đèn Led.
Chương V: KẾT QUẢ THI CÔNG VÀ HƯỚNG PHÁT TRIỂN CỦA ĐỀ TÀI
I. KẾT QUẢ THI CÔNG:
Với những yêu cầu đặt ra như trình bày ở trước, luận văn này đã thực hiện xong các nội dung đó và phần thi công hoạt động tốt. Các phần đã thực hiện và hoạt động được có thể kể ra như sau:
- Mô hình cân có gắn loadcell.
- Bộ nguồn ổn định cung cấp cho loadcell, nguồn chuẩn cấp cho A/D, và các nguồn khác cấp cho IC.
- Mạch khuếch đại tín hiệu từ loadcell.
- Mạch Vi Xử Lý và chương trình đọc A/D.
- Hiển thị kết quả cân trên Led 7 Đoạn.
Mặc dù đã cố gắng nhiều nhưng phần thi công còn có một số hạn chế sau:
Nhiễu vẫn còn tác động vào hệ thống làm cho việc hiển thị không ổn định cho lắm dù đã xử lý chống nhiễu khá nhiều kể cả việc dùng phần mềm là lấy trung bình sau 15 lần đọc A/D (rất khó lấy trung bình với số lần lớn hơn vì vi xử lý là loại 8 bit nên nếu lấy nhiều lần thì có thể vượt quá giá trị tối đa chứa trong hai ô nhớ thì rất khó xử lý). Tuy nhiên nhiễu này chỉ làm không ổn định ở số cuối nên có thể chấp nhận được. Nhiễu này có thể hạn chế được bằng cách sử dụng các linh kiện có chất lượng tốt hơn cho các nguồn và cho mạch khuếch đại... Mặc dù loadcell dùng trong mô hình có tải trọng chịu được là 350kg nhưng do chỉ sử dụng một loadcell nên rất khó bố trí sao cho tải trọng phân bố đều trên bàn cân. Do đó khi có khối lượng lớn đặt lên bàn cân mà không cân bằng thì kết quả có thể không được chính xác, nhưng rất đúng nếu vật cân có khối lượng nhỏ.
II. HƯỚNG PHÁT TRIỂN CỦA ĐỀ TÀI:
Như đã trình bày ở phần trước, ngoài nút nhấn “Auto” ra phần cứng còn có thêm nút “Tare” và “Net weigh” là nhằm mục đích cân và trừ bì để cân được khối lượng hàng hóa. Cách thức viết chương trình cho hai nút nhấn này cũng giống như cách thực hiện ở trên .
Sau khi chỉnh các thông số cho bộ khuếch đại như trên ta viết chương trình cho vi xử lý AT89C51 dùng trong mô hình cân theo lưu đồ giải thuật ở trang sau.
Trong các đầu cân thực tế sau khi chỉnh Auto Zero xong thì các lần cân sau đó có thể không cần chỉnh lại vì đã có bộ nhớ lưu lại giá trị này.Ở đây do không có sử dụng bộ nhớ ngoài và nguồn nuôi bộ nhớ nên trước khi cân cần phải chỉnh lại Zero hoặc lưu giá trị điện áp trạng thái Zero đã biết từ trước trong lúc lập trình cho AT89C51.
Ngoài ra nếu sử dụng trong việc cân động hay chống rung thì cần phải lấy trung bình các giá trị tính toán .Tuy nhiên cần phải sử dụng A/D có tốc độ biến đổi càng nhanh thì độ chính xác càng cao.
Để nâng cao tính năng cho phần mạch dùng vi xử lý có thể thiết kế thêm các nút nhấn để chỉnh bước cân (span ) nhằm cài đặt hệ số cho vi xử lý tính toán các giá trị cân chính xác theo khối lượng chuẩn quy định, hoặc có thể là chọn dấu chấm thập phân bằng cách thay đổi trên nút nhấn ...Một số chức năng của đầu cân thực tế có thể thực hiện được nếu sử dụng bộ nhớ và nguồn nuôi cho nó và dùng các linh kiện có chất lượng cao.
Để ứng dụng trong việc cân động hoặc chống rung khi cân thì cần sử dụng bộ biến đổi A/D có tốc độ cao và chính xác. Ngoài ra còn phải thực hiện lấy trung bình nhiều lần hoặc dùng lọc lấy tần số thấp...
Như đã trình bày ở phần trước, ngoài việc sử dụng trong hệ thống cân điện tử hay các ứng dụng trong việc đo khối lượng khác, hệ thống cân loại này rất có khả năng áp dụng trong dây chuyền cân và đóng bao tự động. Nếu viết chương trình cho máy tính hoặc vi xử lý một cách thích hợp thì có thể không cần dùng PLC như đã được dùng ở nhiều nơi trong thực tế.
Phần bốn: PHẦN PHỤ LỤC
I. GIỚI THIỆU CÁC IC SỬ DỤNG TRONG MẠCH:
Ngoài các IC đã mô tả trên đây, phần này giới thiệu các IC khác có sử dụng trong mạch. Ở đây chỉ nêu sơ đồ chân, cách thức hoạt động . Các thông số kỹ thuật chi tiết có thể được tìm thấy trong các sổ tay hoặc các CD-ROM tra cứu khác.
1. 74LS139:
74LS139 là IC giải mã 2 sang 4 (ở đây được dùng trong việc giải mã địa chỉ cho Card mở rộng).Chân cho phép là chân G ( chân số 1) tích cực mức thấp.
MOV P2,A
RET
;**********************************************************
;* CHUONG TRINH CON NHAN SO 16 BIT VOI SO 8 BIT *
;* R1, R0 CHUA SO 16 BIT; B CHUA SO 8 BIT *
;* KET QUA CHUA TRONG R1,R0 .KHONG XET TRAN *
;**********************************************************
NHAN_16_8: PUSH 04H
PUSH 03H
PUSH 02H
PUSH ACC
MOV R2,#0
MOV R3,#0
MOV R4,#8
NHAN:MOV A,R2
ADD A,R2
MOV R2,A
MOV A,R3
ADDC A,R3
MOV R3,A
MOV A,B
RLC A
MOV B,A
JNC NHAN_LOOP
MOV A,R2
ADD A,R0
MOV R2,A
MOV A,R3
ADDC A,R1
MOV R3,A
NHAN_LOOP:DJNZ R4,NHAN
MOV R1,03H
MOV R0,02H
POP ACC
POP 02H
POP 03H
POP 04H
RET
;***********************************************************
;* CHUONG TRINH CON CHUYEN SANG MA BCD DE XUAT LED *
;***********************************************************
BINTOBCD:PUSH ACC
PUSH B
MOV B,#10
ACALL DIV_16_8
PUSH B
MOV B,#10
ACALL DIV_16_8
PUSH B
MOV B,#10
MOV A,R6
DIV AB
PUSH B
SWAP A
POP B
ORL A,B
MOV R7,A
POP B
MOV A,B
SWAP A
POP B
ORL A,B
MOV R6,A
POP B
POP ACC
RET
;**********************************************************
;* CHUONG TRINH CON CHIA SO 16 BIT CHO SO 8 BIT *
;* R7,R6 CHUA SO 16 BIT; B CHUA SO 8 BIT *
;* KET QUA CHUA TRONG R7,R6 *
;**********************************************************
DIV_16_8:PUSH 02H
PUSH ACC
MOV R2,#16
CLR A
DEVIDE:XCH A,R6
CLR C
RLC A
XCH A,R6
XCH A,R7
RLC A
XCH A,R7
RLC A
CJNE A,B,NOT_EQUAL
SJMP A_GREATER_EQ_B
NOT_EQUAL:JC BELOW
A_GREATER_EQ_B:SUBB A,B
XCH A,R6
ORL A,#1
XCH A,R6
BELOW:DJNZ R2,DEVIDE
XCH A,B
POP ACC
POP 02H
RET
TABLE1:DB 40H,79H,24H,30H,19H,12H,02H,78H,00H,10H;Ma Led 7;doan cua cac digi
TÀI LIỆU THAM KHẢO
1. Họ vi điều khiển 8051
Tống Văn On
Hoàng Đức Hải
2. Kỹ thuật đo
Nguyễn Ngọc Tân
Ngô Văn Ky
3. Đo lường và điều khiển bằng máy tính
Ngô Diên Tập
4. Introduction to Control System Technology
Robert N. Bateson
5. The 8051 Micro Controller
Scott Mackenzie
6. Linear/Switchmode Voltage Regulator Handbook
(Motorola Inc.)
7. National Semiconductor Datasheet
8. Micro Controller and Interface.
Và một số website:
www.atmel.com
www.maxim-ic.com
http://www.loadcellsystems.co.za
www.massload.com/truckbolt.htm
http://www.sensy.be/digital.htm
http://www.ttloadcells.com
http://www.alldatasheet.com
TÀI LIỆU THAM KHẢO
TÀI LIỆU THAM KHẢO
- Giáo Trình Điện Tử Thông Tin
PTS. Phạm Hồng Liên
NXBKH-KT
- Tính Toán và Ứng Dụng Mạch Lọc Tích Cực
KS. Ngô Anh Ba
NXBKH-KT
- Linh Kiện Quang Điện Tử
Dương Minh Trí
NXBKH-KT
- Luận văn tốt nghiệp Tổng Đài Chuyển Mạch PAM
- Electronic Design Circuits and Systems
Savant-Roden-Carpenter
- Kỹ thuật Mạch Điện Tử
Phạm Minh Hà
NXBKH-KT
- Sơ đồ chân linh kiện bán dẫn
Dương Minh Trí
NXBKH-KT
- Electronic Filter Design Handbook
Arthur B . Williams – Fred J . Taylor
9. Máy Điện Thoại An Phím
PTS Đỗ Kim Bằng
KS Phùng Công Hùng
KS Nguyễn Bá Phương
KS Trịnh Thế Vinh
NXBKH-KT











