ĐỒ ÁN TỐT NGHIỆP cơ điện tử MÔ HÌNH DÂY CHUYỀN CHIẾT RÓT VÀ ĐÓNG NẮP CHAI TỰ ĐỘNG
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP cơ điện tử CHIẾT RÓT VÀ ĐÓNG NẮP CHAI TỰ ĐỘNG
MỤC LỤC
Chương 1 : GIỚI THIỆU ....................................................................................... 1
1.1 Đặt vấn đề : .................................................................................................. 1
1.2 Mục tiêu đề tài : ........................................................................................... 1
1.3 Nội dung đề tài :........................................................................................... 1
Chương 2 : THIẾT KẾ VÀ THI CÔNG............................................................... 2
2.1 Phần cơ khí : ................................................................................................ 2
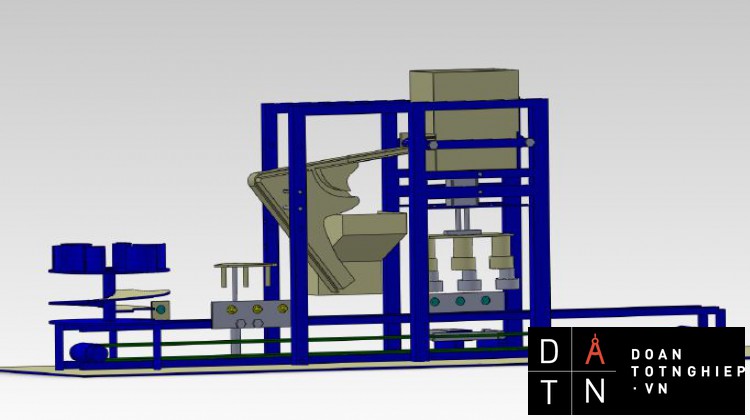
2.1.1 Mô hình thiết kế trên máy :................................................................... 2
2.1.2 Hình chiếu của mô hình : ...................................................................... 3
2.1.3 Mô hình trên thực tế :............................................................................ 4
2.1.4 Vật liệu cơ khí dùng trong mô hình và lí do sử dụng : ......................... 5
2.1.5 Các thiết bị dùng trong hệ thống :......................................................... 5
2.1.5.1 Cảm biến : .................................................................................... 5
2.1.5.2 Opto : ............................................................................................ 6
2.1.5.3 Cơ cấu chấp hành : ....................................................................... 7
2.1.5.4 Van đảo chiều : ............................................................................. 8
2.1.5.5 Van điện từ : ............................................................................... 10
2.1.5.6 Relay :......................................................................................... 11
2.1.5.7 Động cơ : .................................................................................... 12
2.1.5.8 Công tắc hành trình : .................................................................. 13
2.1.5.9 Khối nguồn : ............................................................................... 14
2.1.5.10 Nút nhấn : ................................................................................. 15
2.1.6 Các cơ cấu quan trọng trong mô hình : ............................................... 16
2.1.6.1 Hệ thống băng tải : ..................................................................... 16
2.1.6.2 Cơ cấu rót nước : ........................................................................ 19
2.1.6.3 Cơ cấu tải nắp và tra nắp : .......................................................... 21
2.1.6.4 Cơ cấu vặn nắp : ......................................................................... 23
2.2 Phần điều khiển : ....................................................................................... 25
2.2.1 Giới thiệu sơ lược về PLC S7-200 :.................................................... 25
2.2.2 Cấu trúc PLC S7-200 : ........................................................................ 26
2.2.2.1 Hình dáng và cấu trúc bên ngoài : .............................................. 26
2.2.2.2 Cấu trúc phần cứng của S7-200: ................................................ 26
2.2.2.3 Ưu điểm của PLC S7-200 : ........................................................ 27
2.2.2.4 Ứng dụng của PLC S7-200 : ...................................................... 27
2.2.3 Phần mềm lập trình và mô phỏng cho PLC : ...................................... 28
2.2.3.1 Phần mềm lập trình : .................................................................. 28
2.2.3.2 Phần mềm mô phỏng :................................................................ 29
2.2.4 PLC dùng trong hệ thống :.................................................................. 30
2.2.5 Sơ đồ khối kết nối PLC với các thiết bị của mô hình : ....................... 32
2.2.6 Sơ đồ khối cảm biến kết nối PLC : ..................................................... 33
2.2.7 Sơ đồ mạch opto: ................................................................................ 33
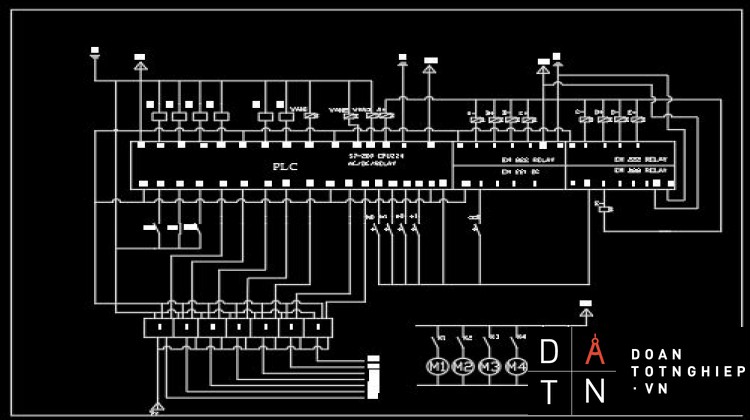
2.2.8 Sơ đồ mạch điện :................................................................................ 33
2.2.9 Lưu đồ giải thuật : ............................................................................... 35
Chương 3 : KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN ......................................... 38
3.1 Kết quả : ..................................................................................................... 38
3.1.1 Kết quả đạt được : ............................................................................... 38
3.1.2 Hạn chế : ............................................................................................. 38
3.2 Hướng phát triển : ..................................................................................... 38
3.3 Kết luận : .................................................................................................... 39
DANH MỤC TÀI LIỆU THAM KHẢO............................................................. 40
DANH MỤC CÁC BẢNG , SƠ ĐỒ , HÌNH
Hình 2. 1 : Mô hình thiết kế trên bản vẽ......................................................................... 2
Hình 2. 2 : Hình chiếu của mô hình................................................................................ 3
Hình 2. 3: Mô hình thực tế. ............................................................................................ 4
Hình 2. 4 : Cảm biến quang tiệm cận. ............................................................................ 5
Hình 2. 5 : Opto. ............................................................................................................. 6
Hình 2. 6 : Chiều tác động ngược lại do ngoại lực (a) và do lò xo (b)........................... 7
Hình 2. 7 : Xy lanh đôi tác động kép dùng trong mô hình. ............................................ 8
Hình 2. 8 : Xy lanh đơn tác động kép dùng trong mô hình. ........................................... 8
Hình 2. 9 : Trạng thái OFF và ON của van đảo chiều.................................................... 9
Hình 2. 10 : Van đảo chiều 5/2 dùng trong mô hình. ..................................................... 9
Hình 2. 11 : Van điện từ. .............................................................................................. 10
Hình 2. 12 : Van điện từ và van cơ trong mô hình. ...................................................... 11
Hình 2. 13 : Relay. ........................................................................................................ 11
Hình 2. 14 : Relay và đế được dùng để điều khiển động cơ mô hình. ......................... 12
Hình 2. 15 : Động cơ DC 24V. ..................................................................................... 12
Hình 2. 16 : Công tắc hành trình. ................................................................................. 13
Hình 2. 17 : Nguồn tổ ong thông dụng. ........................................................................ 14
Hình 2. 18 : Nguồn được mắc và bố trí trong hệ thống................................................ 14
Hình 2. 19 : Nút nhấn. .................................................................................................. 15
Hình 2. 20 : Băng tải chính của mô hình. .................................................................... 16
Hình 2. 21 : Bộ truyền đai. ........................................................................................... 17
Hình 2. 22 : Băng tải dạng tròn của mô hình................................................................ 18
Hình 2. 23 : Cơ cấu rót nước của mô hình (mặt trước ). .............................................. 19
Hình 2. 24 : Cơ cấu rót nước của mô hình ( mặt sau ). ................................................ 20
Hình 2. 25 : Băng tải nắp. ............................................................................................. 21
Hình 2. 26 : Hộp trữ nắp. .............................................................................................. 22
Hình 2. 27 : Hộp phân loại nắp..................................................................................... 22
Hình 2. 28 : Cơ cấu vặn nút chai trong thực tế của mô hình. ....................................... 23
Hình 2. 29 : Đầu vặn nắp. ............................................................................................. 24
Hình 2. 30 : Cấu trúc PLC S7-200 ............................................................................... 26
Hình 2. 31 : Mô hình tổng quát của một PLC . ............................................................ 27
Hình 2. 32 : PLC S7-200 CPU 224 .............................................................................. 30
Hình 2. 33 : Sơ đồ mạch opto. ...................................................................................... 33
Chương 1 : GIỚI THIỆU
1.1 Đặt vấn đề :
- Trong thực tế việc tự động hóa trong quá trình sản xuất và ứng dụng mang một ý nghĩa hết sức to lớn , có thể nói tự động hóa là ngành đánh giá sự phát triển của công nghiệp trên thế giới nói chung và một quốc gia nói riêng. Sự phát triển của công nghiệp đặc biệt là công nghệ tự động đã tạo ra hàng loạt dây chuyền sản xuất , thiết bị máy móc hiện đại với những đặc điểm vược trội như là tốc độ cao , khả năng thích ứng và có tính chuyên môn hóa … đã và đang ứng dụng rộng rãi trong nền công nghiệp nước nhà.
- Trong công nghiệp các nhà máy nước uống đóng chai ngày càng nhiều và đa dạng về chủng loại cũng như thương hiệu. Hệ thống dây chuyền chiết rót đóng nắp tự động là không thể thiếu và rất quan trọng trong các nhà máy.Xuất phát từ nhu cầu thực tiễn đó nhóm đã thiết kế và thi công “ Mô Hình Dây Chuyền Chiết Rót Đóng Chai Tự Động ” dùng PLC để điều khiển.
1.2 Mục tiêu đề tài :
- Nắm được cách viết chương trình cho hệ thống sử dụng PLC. Thiết kế và tiến hành thi công phần cứng cho “Mô Hình Dây Chuyền Chiết Rót Đóng Chai Tự Động”. Đảm bảo hệ thống hoạt động đúng theo chương trình điều khiển.
1.3 Nội dung đề tài :
- Tìm hiểu về cấu tạo nguyên lý hoạt động của nút nhấn , van điện từ , van khí nén điều khiển bằng điện , quang cảm biến , công tắc hành trình , relay chung với các thiết bị.Sử dụng phần mềm lập trình cho PLC để hoạt động đúng yêu cầu công nghệ. Vẽ sơ đồ khối , sơ đồ kết nối của hệ thống chiết rót đóng chai ,giải thuật và viết chương trình điều khiển cho hệ thống PLC.Nhận xét và đưa hướng phát triển cho đề tài.
Chuong2: THIET KE vA THI CONG
2.1.2 Hình chiếu của mô hình :
Chú thích :
Hình 2.2: Hình chiếu của mô hình
1: Băng tải dạng tròn. 5: Hộp trữ nắp.
2: Băng tải chính. 6: Hộp phân loại nắp.
3: Cơ cấu rót nước. 7: Cơ cấu vặn nắp.
4: Băng tải nắp. 8: Hộp đựng nắp lỗi
2.1.3 Mo hinh tren thực tế
2.1.4 Vật liệu cơ khí dùng trong mô hình và lí do sử dụng :
- Sắt U , sắt V , sắt tấm 1 li :
+ Chịu tải lớn , chịu được rung lắc.
+ Giá thành tương đối chấp nhận được.
+ Có thể tăng thêm tính mỹ thuật bằng cách dùng sơn.
- Nhôm :
+ Dễ gia công thành những chi tiết và hình dạng phức tạp mà không cần dùng nhiều phương pháp gia công.
+ Có thể kết nối với nhau dễ dàng bằng cách hàn hoặc dùng keo , kẹp , bulong ,
đinh tán.
- Mica và nhôm nhựa :
+ Nhẹ , đẹp , cách điện tốt.
+ Gia công chính xác theo bảng vẽ.
+ Có nhiều lựa chọn về mặt mỹ thuật ( độ dày , màu sắc ).
2.1.5 Các thiết bị dùng trong hệ thống :
2.1.5.1 Cảm biến :
Hình 2.4: Cảm biến quang tiệm cận.
- Cảm biến được sử dụng trong hệ thống là cảm biến quang tiệm cận.
- Mã sản phẩm : E18-D80NK.
- Thông số kỹ thuật :
+ Hình trụ có đường kính d=18 mm.
+ Có 3 dây :
Nguồn (5V).
Mass (0V).
Tín hiệu.
+ Thu phát chung , khoảng cách phát hiện vật xa nhất khoảng 1 m , gần nhất khoảng 1 cm , có thể điều chỉnh.
+ Độ nhạy cao.
+ Điện áp hoạt động 5V.
- Nguyên lý hoạt động :
+ Cảm biến quang thu phát chung được cấu tạo từ một led hồng ngoại thu và hồng ngoại phát. Khi có vật thể tác động vào vùng phát tia sẽ làm phản xạ lại ánh sáng vào led hồng ngoại thu. Lúc này led hồng ngoại thu sẽ tác động vào transistor để xuất tín hiệu ra.
2.1.5.2 Opto :
Hình2.5:Opto.
- Nguyên lý hoạt động :
+ Khi có dòng nhỏ đi qua 2 đầu của led có trong opto làm cho led phát sáng.
+ Khi led phát sáng làm thông 2 cực của photo diot , mở cho dòng điện chạy qua.
- Vai trò : Cách li điều khiển giữa hai tầng mạch điện khác nhau.
2.1.5.3 Cơ cấu chấp hành : Nhiệm vụ :
- Cơ cấu chấp hành có nhiệm vụ biến đổi năng lượng khí nén thành năng lượng cơ học. Cơ cấu chấp hành có thể chuyển động thẳng ( Xy lanh ) hoặc chuyển động quay (động cơ khí nén ).
Xy lanh :
- Xy lanh tác dụng đơn :
+ Áp lực khí nén chỉ tác động vào một phía của xy lanh , phía còn lại do ngoại lực hay lò xo tác động.
+ Một số loại xy lanh tác động 1 chiều :
Hình 2.6: Chiều tác động ngược lại do ngoại lực (a) và do lò xo (b)
- Xy lanh tác động 2 chiều ( Xy lanh tác động kép ) :
+ Khí nén được đưa vào 2 phía của xy lanh , do yêu cầu điều khiển mà xy lanh
đi vào hay đi ra sẽ tùy thuộc vào việc đưa khí nén vào phía nào của xy lanh.
Hình 2.7 : Xy lanh đôi tác động kép dùng trong mô hình.
Hình 2.8: Xy lanh đơn tác động kép dùng trong mô hình.
2.1.5.4 Van đảo chiều :
- Van đảo chiều có nhiệm vụ điều khiển dòng năng lượng bằng cách đóng mở hay
thay đổi vị trí các cửa van để thay đổi hướng của dòng khí nén.
Hình 2.9 : Trạng thái OFF và ON của van đảo chiều.
Hình 2.10 : Van đảo chiều 5/2 dùng trong mô hình.
2.1.5.5 Van điện từ :
- Thông số :
Hình 2.11 : Van điện từ.
+ Mã sản phẩm : UNI-D(UD-8).
+ Đường kính d = 20 mm.
+ Điện áp hoạt động 24VDC 2 cửa.
+ Áp suất làm việc 0.8 Mpa.
+ Nhiệt độ cho phép 5 – 80 độ C.
+ Kích thước đường ống 12.
- Nguyên lý hoạt động :
+ Van điện từ có tác dụng đóng mở khi có dòng điện đi qua.Van điện từ UNI-D là van thường đóng , khi có dòng điện đi qua van sẽ thay đổi trạng thái đóng thành mở , cho chất lỏng và khí đi qua.
- Ngoài ra còn kết hợp thêm van cơ để điều tiết áp chất lỏng đảm bảo với cùng một thời gian rót thì lượng chất lỏng được rót ở ba vòi là bằng nhau.
2.1.5.6 Relay :
Hình 2.12 : Van điện từ và van cơ trong mô hình.
Hình 2.13 : Relay.
- Mã số sản phẩm : IEC255.
- Cường độ hoạt động : 5A.
- Tiếp điểm có thể dùng cả 240V AC và 24V DC.
- Model của đế : 2-M4X10 là loại 8 chân nhỏ.
Hình 2.14 : Relay và đế được dùng để điều khiển động cơ mô hình.
2.1.5.7 Động cơ :
Hình 2.15 : Động cơ DC 24V.
- Thông số :
+ Đường kính ngoài 5 cm.
+ Điện áp hoạt động : 24 VDC.
- Có thể đảo chiều động cơ dễ dàng bằng cách đổi 2 dây 5V và 0V.
- Ba động cơ đồng bộ của cơ cấu vặn nắp chai có số vòng quay 150 vòng/phút.
- Động cơ của băng tải chính có số vòng quay 40 vòng / phút.
- Một động cơ của băng tải hệ thống cắp nắp có số vòng quay 60 vòng / phút.
- Tùy model của motor khác nhau nhưng điều có cường độ dòng điện khoảng
1,5A.
- Công suất khoảng 5 – 7 W.
- Động cơ có tích hợp bộ giảm tốc.
2.1.5.8 Công tắc hành trình :
.............................
Chú thích :
- Động cơ 1 ( M1 ) : Động cơ băng tải tròn.
- Động cơ 2 ( M2 ) : Động cơ băng tải chính.
- Động cơ 3 ( M3 ) : động cơ băng tải nắp.
- Động cơ 4,5,6 ( M4 , M5 , M6 ) : Động cơ vặn nắp.
- Xy lanh A : Xy lanh rót nước.
- Xy lanh B : Xy lanh chặn 1.
- Xy lanh C : Xy lanh vặn nắp.
- Xy lanh D : Xy lanh ép chai.
- Xy lanh E : Xy lanh chặn 2.
- Cảm biến 1 : Cảm biến đếm 3 chai.
- Cảm biến 2,3,4 : Cảm biến nhận chai để rót nước.
- Cảm biến 5,6,7 : Cảm biến nhận chai để vặn nắp
Chương 3 : KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN
3.1 Kết quả :
3.1.1 Kết quả đạt được :
- Hoàn thành được các công việc đã đề ra như :
+ Thiết kế : Đưa ra những ý tưởng về các chi tiết và thiết kế trên bản vẽ.
+ Thi công : Gia công và chế tạo các chi tiết đã được thiết kế trên bản vẽ.
+ Vận hành được mô hình : Sử dụng phần mềm điều khiển để mô hình hoạt
động đúng yêu cầu đã đề ra.
- Ứng dụng thành công các môn học vào thực tiễn như : Khí nén-thủy lực , thực hành tiện phay ,cảm biến-đo lường , kỹ thuật lập trình PLC.
- Đối với mô hình thì trong 1 giờ hoàn thành được 90 sản phẩm.
3.1.2 Hạn chế :
- Trong mô hình vẫn có một số lỗi xảy ra :
+ Băng tải tròn đưa chai vào băng tải chính thì chai có thể ngã.
+ Nắp đưa từ hộp trữ nắp vào hộp phân loại có thể kẹt nắp.
+ Chai đến cơ cấu tra nắp có thể không tra được nắp.
- Tuy nhiên những lỗi trên chỉ xảy ra khoảng 20% đến 30%.
3.2 Hướng phát triển :
- Nhóm sẽ khắc phục những lỗi xảy ra trong mô hình , giảm xác suất xảy ra lỗi xuống còn 10% đến 15% để mô hình hoàn thiện hơn và an toàn tuyệt đối cho người vận hành.
- Bên cạnh đó nhóm sẽ phát triển thêm phần dán nhãn , đóng thùng và tăng năng
suất hoạt động của mô hình.
- Điều mà nhóm muốn vươn tới là hoàn thiện mô hình để có thể đưa ra thành dây
chuyền thực tế.
3.3 Kết luận :
- Trong quá trình thực hiện mô hình , cả nhóm đã nổ lực hết mình để hoàn thành mô hình. Tuy thời gian không dài nhưng ít nhiều cũng trang bị được cho cả nhóm những kinh nghiệm quý báu trong việc thiết kế và lập kế hoạch thi công. Đây là điều kiện đặc biệt để ứng dụng các môn học , môn thực hành và thực tế. Cảm nhận được tầm quan trọng của từng chi tiết mà mình gia công và chế tạo ra , có cơ hội cọ xát với môi trường cơ khí và điện tử một cách thực tế nhất , rút ra nhiều kinh nghiệm quý báu cho bản thân trong việc so sánh , lựa chọn và đánh giá được những thiết bị điện , điện tử thông dụng ngoài thị trường. Ngoài ra nhóm xin một lần nữa gửi lời cảm ơn đến các thầy cô đã sát cánh và tạo mọi điều kiện tốt nhất cho nhóm trong quá trình thực hiện và hoàn thành mô hình.









