ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ THIẾT KẾ BỘ ĐO VÀ THU THẬP DỮ LIỆU CÔNG TƠ ĐIỆN TỬ MỘT PHA

NỘI DUNG ĐỒ ÁN
MỤC LỤC ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ THIẾT KẾ BỘ ĐO VÀ THU THẬP DỮ LIỆU CÔNG TƠ ĐIỆN TỬ MỘT PHA
LỜI CAM ĐOAN.. 1
MỤC LỤC.. 2
DANH MỤC THUẬT NGỮ VIẾT TẮT.. 6
DANH MỤC HÌNH ẢNH.. 7
LỜI MỞ ĐẦU.. 10
PHÂN CÔNG NHIỆM VỤ.. 12
Chương 1. TỔNG QUAN LÝ THUYẾT VỀ CÔNG TƠ ĐIỆN.. 13
1.1 Giới thiệu chương. 13
1.2 Công suất và năng lượng trong mạch điện xoay chiều. 13
1.3 Giới thiệu về công tơ điện. 14
1.3.1 Các loại công tơ điện trên thị trường. 15
1.3.2 Các ưu, nhược điểm của công tơ cơ. 16
1.4 Giới thiệu về công tơ điện tử 1 pha. 16
1.4.1 Cấu tạo và nguyên lý đo đếm điện năng. 17
1.4.2 Ưu điểm của công tơ điện tử.. 18
1.5 Mục tiêu đặt ra của đề tài18
1.6 Ý tưởng thực hiện đề tài19
1.6.1 Ý tưởng thực hiện bộ đo. 19
1.6.2 Ý tưởng thực hiện bộ thu thập dữ liệu. 20
1.7 Lý thuyết về hiệu ứng Hall21
1.8 Nhiễu và các cách triệt nhiễu trong mạch điện tử.. 22
1.8.1 Nhiễu trong mạch điện tử.. 22
1.8.1.1 Nhiễu vi sai23
1.8.1.2 Nhiễu cách chung. 23
1.8.2 Triệt nhiễu trong hệ thống điện tử.. 24
1.8.2.1 Triệt nhiễu vi sai24
1.8.2.2 Triệt nhiễu cách chung. 24
1.9 Lý thuyết về mạch nguồn. 25
1.9.1 Nguồn ổn áp tuyến tính. 25
1.9.2 Nguồn ổn áp xung Buck.. 27
1.9.3 Lựa chọn phương án thiết kế mạch nguồn. 28
1.10 Lý thuyết thiết kế mạch nguồn ổn áp xung Buck.. 29
1.10.1 Chế độ hoạt động mạch nguồn ổn áp xung. 29
1.10.2 Cách thiết kế linh kiện cho mạch nguồn ổn áp xung Buck.. 30
1.11 Lý thuyết về sai số phép đo. 31
1.12 Kết luận chương. 32
Chương 2. TÌM HIỂU CÁC LINH KIỆN TRONG ĐỀ TÀI. 34
2.1 Giới thiệu chương. 34
2.2 Vi điều khiển MSP430. 34
2.2.1 Tổng quan về dòng vi điều khiển MSP430. 34
2.2.2. Không gian địa chỉ35
2.2.2.1. Flash/ROM... 36
2.2.2.2. RAM... 36
2.2.2.3. Những khối ngoại vi36
2.2.2.4. Những thanh ghi chức năng đặc biệt (SFR). 36
2.2.3 Giới thiệu vi điều khiển MSP430F6736. 37
2.3 Giới thiệu LCD 16x2. 37
2.4 Giới thiệu về EEPROM 24C64. 38
2.4.1 Các đặc điểm chính. 38
2.4.2 Mô tả chân và chức năng. 38
2.5 Giới thiệu IC cảm biến dòng ASC712. 39
2.5.1 Khảo sát IC ASC712. 39
2.5.2 Các đặc điểm chính của IC cảm biến dòng ASC712. 39
2.6 Giới thiệu module RF24L01. 40
2.7 Kết luận chương. 42
Chương 3. THIẾT KẾ VÀ THI CÔNG.. 43
3.1 Giới thiệu chương. 43
3.2 Thiết kế phần cứng. 43
3.2.1 Thiết kế bộ đo công tơ điện tử một pha. 43
3.2.1.1 Thiết kế khối trung tâm.. 43
3.2.1.2 Thiết kế khối hiển thị44
3.2.1.3 Thiết kế khối EEPROM và khối RF. 45
3.2.1.4 Thiết kế kênh đo điện áp. 46
3.2.1.5 Thiết kế kênh dòng điện. 47
3.2.1.6 Thiết kế mạch nguồn. 49
3.2.2 Thiết kế bộ thu thập dữ liệu. 52
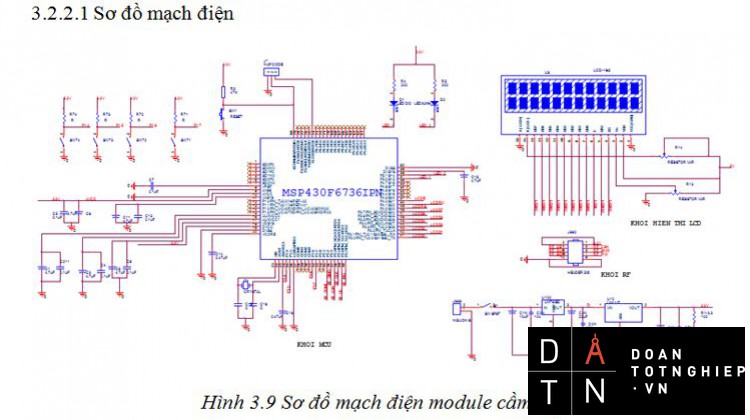
3.2.2.1 Sơ đồ mạch điện. 52
3.2.2.2 Tính toán thiết kế. 52
3.3 Thiết kế phần mềm... 54
3.3.1 Nhiệm vụ của phần mềm... 54
3.3.2 Thiết kế phần mềm cho bộ đo Công tơ điện tử.. 55
3.3.2.1 Ý tưởng đo công suất tức thời của thiết bị điện. 55
3.3.2.2 Ý tưởng đo điện năng tiêu thụ của thiết bị56
3.3.2.3 Sơ đồ thuật toán chương trình chính. 58
3.3.2.4 Các chương trình con quan trọng. 60
3.3.2.5 Thủ thuật phần mềm để khắc phục lỗi phần cứng. 66
3.3.3 Thiết kế phần mềm bộ thu thập dữ liệu. 67
3.4 Thi công. 67
3.4.1 Thi công bộ đo Công tơ điện tử một pha. 67
3.4.2 Thi công bộ thu thập dữ liệu. 68
3.5 Kết luận chương.69
Chương 4. KIỂM TRA VÀ ĐÁNH GIÁ HỆ THỐNG.. 70
4.1 Giới thiệu
DANH MỤC THUẬT NGỮ VIẾT TẮT
ADC Analog-to- Digital Converter
CPU Central Processor Unit
CTĐT Công tơ điện tử
DAC Digital-to- Analog Converter
EEPROM Electrically Erasable Programmable Read-Only Memory
I2C Inter Intergrated Circuit
IC Intergrated Circuit
LCD Liquid Crystal Display
MCU Micro Controller Unit
RAM Random Access Memory
RF Radio Frequency
ROM Read Only Memory
TI Texas Instrument
RISC Reduce Intruction Set Computer
SD24 Sigma Delta
SPI Serial Peripheral Interface
DANH MỤC HÌNH ẢNH
Hình 1.1: Công tơ cơ 1 pha. 15
Hình 1.2: Cấu tạo của công tơ cơ 1 pha. 15
Hình 1.3 Công tơ điện tử 1 pha DT01P-RF. 17
Hình 1.4 Sơ đồ khối cấu tạo của Công tơ điện tử 1 pha DT01P-RF. 17
Hình 1.5 Sơ đồ khối của bộ đo. 19
Hình 1.6 Sơ đồ khối của bộ thu thâp dữ liệu. 20
Hình 1.7: Nguyên lý hiệu ứng Hall khi chưa có từ trường (a) và khi có từ trường (b). 21
Hình 1.8 Nhiễu trong mạch điện tử. 22
Hình 1.9 Nhiễu vi sai23
Hình 1.10 Nhiễu cách chung. 23
Hình 1.11 Cách sử dụng tụ lọc để triệt nhiễu vi sai24
Hình 1.12 Hoạt động và cấu tạo của cuộn cảm bẫy. 24
Hình 1.13 Nguyên lý hoạt động của nguồn ổn áp tuyến tính. 26
Hình 1.14 Nguyên lý hoạt động của IC nguồn ổn áp xung H34063. 27
Hình 1.15 Mạch nguồn ổn áp xung sử dụng IC H34063. 27
Hình 1.16 Dạng tín hiệu mạch nguồn ổn áp xung ở chế độ hoạt động liên tục. 29
Hình 1.17 Mạch nguyên lý của nguồn ổn áp xung. 29
Hình 2.1: Sơ đồ cấu trúc vi điều khiển MSP430F673xIPN.. 35
Hình 2.2 Tổ chức bộ nhớ của vi điều khiển MSP430. 36
Hình 2.3 LCD 16x2. 37
Hình 2.4 Module IC cảm biến dòng ASC712. 39
Hình 2.5 Cấu trúc của IC ASC712. 39
Hình 2.6: Sơ đồ nguyên lý module nRF24L01. 40
Hình 3.1 Sơ đồ mạch điện khối trung tâm.. 43
Hình 3.2 Mạch reset khối trung tâm.. 44
Hình 3.2 Sơ đồ mạch khối hiển thị44
Hình 3.3 Sơ đồ mạch khối EEPROM và khối RF. 45
Hình 3.4 Sơ đồ mạch điện kênh điện áp. 46
Hình 3.5 Sơ đồ cầu phân áp dùng cho kênh đo điện áp. 46
Hình 3.6 Sơ đồ mạch kênh dòng điện. 47
Hình 3.7 Mạch nguồn ổn áp xung sử dụng IC H34063. 49
Hình 3.8 Mạch nguồn ổn áp tuyến tính sử dụng IC LM1117. 51
Hình 3.9 Sơ đồ mạch điện module cầm tay. 52
Hình 3.10 Sơ đồ mạch điện khối nguồn bộ thu thập dữ liệu. 52
Hình 3.11 Sơ đồ các nút ấn ngoại vi bộ thu thập dữ liệu. 53
Hình 3.12 Ý tưởng đo điện năng tiêu thụ. 55
Hình 3.13 Quan hệ lượng giác biện luận phương pháp tìm góc pha. 56
Hình 3.14 Mô hình theo thời gian của chương trình chính. 57
Hình 3.15 Sơ đồ thuật toán của chương trình chính. 58
Hình 3.16 Sơ đồ thuật toán của chương trình capture_sample. 59
Hình 3.17 Sơ đồ thuật toán của chương trình system_process. 59
Hình 3.18 Ý tưởng tìm góc lệch pha sai với tín hiệu thực tế. 60
Hình 3.19 Cải tiến thuật toán để áp dụng ý tưởng tìm pha vào tín hiệu thực tế. 61
Bảng 3.1 Khảo sát 100 mẫu của thuật toán tìm góc pha sau cải tiến. 62
Hình 3.20 Cách lấy 20 tọa độ đỉnh của tín hiệu điện áp. 62
Hình 3.21 Đồ thị kiểm tra hàm tìm góc lệch pha với máy đo chuẩn. 63
Hình 3.23 Nội suy tọa độ đỉnh sai nếu thực hiện với nửa chu kỳ nguyên vẹn. 64
Hình 3.24 Phát hiện và loại bỏ bán kỳ không toàn vẹn, thực hiện nội suy trên bán kỳ nguyên vẹn cho độ chính xác cao. 65
Hình 3.25 Sơ đồ thuật toán chương trình tìm tọa độ đỉnh dòng.65
Hình 3.26 Sơ đồ thuật toán chương trình tìm tọa độ đỉnh áp.66
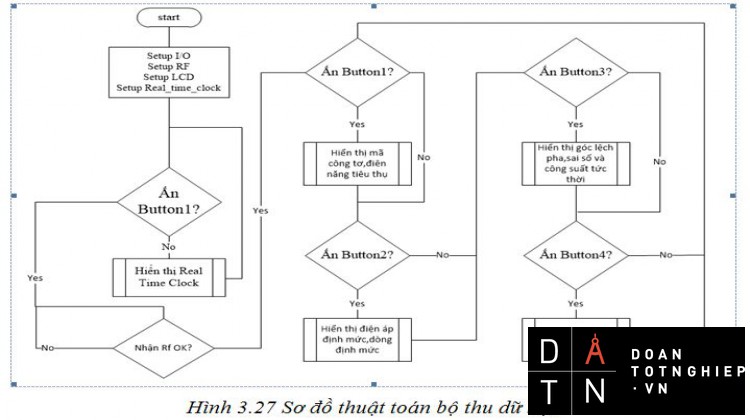
Hình 3.27 Sơ đồ thuật toán bộ thu dữ liệu. 67
Hình 3.28 Mạch hoàn chỉnh bộ đo Công tơ điện tử một pha. 68
Hình 3.29 Mạch thực tế của module thu dữ liệu. 68
LỜI MỞ ĐẦU
c - & - d
Hiện nay trong ngành điện lực, thiết bị đo đếm chủ yếu phục vụ cho quá trình mua bán điện chính là công tơ cơ. Sau một thời gian dài được sử dụng, phương án sử dụng công tơ cơ này bộc lộ khá nhiều nhược điểm như: quá trình thu thập dữ liệu điện tiêu thụ tốn nhiều thời gian và nhân công…Trong thời gian gần đây, đã có một vài đơn vị trong nước thiết kế và chế tạo thành công công tơ điện tử. Bước đầu đưa vào sử dụng nó đã thể hiện được khá nhiều ưu điểm vượt trội so với công tơ cơ. Tuy nhiên thiết bị công tơ điện tử vẫn còn rất mới mẻ và cần được hoàn thiện hơn nữa. Mặt khác là sinh viên ngành Điện tử- Viễn thông, với mong muốn nghiên cứu và chế tạo ra một sản phẩm có tính ứng dụng thực tế, đồng thời được sự gợi ý của Thầy giáo hướng dẫn nên trong phạm vi đồ án tốt nghiệp này, nhóm tác giả đã chọn đề tài “THIẾT KẾ BỘ ĐO VÀ THU THẬP DỮ LIỆU CÔNG TƠ ĐIỆN TỬ MỘT PHA”.Nội dung đồ án gồm có 4 chương:
Chương 1: TỔNG QUAN LÝ THUYẾT VỀ CÔNG TƠ ĐIỆN
Chương 2: TÌM HIỂU CÁC LINH KIỆNTRONG ĐỀ TÀI
Chương 3: THIẾT KẾ VÀ THI CÔNG
Chương 4: KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ĐỀ TÀI
Phương pháp nghiên cứu thực hiện đề tài là tính toán thiết kế mạch, xây dựng các lưu đồ thuật toán, thi công lắp ráp và kiểm tra hoạt động của hệ thống.
Sau quá trình thiết kế và thi công cả phần cứng lẫn phần mềm, quá trình thử nghiệm cho thấy hệ thống hoạt động hệ thống đã hoạt động đúng theo ý tưởng thiết kế ban đầu. Sai số của Công tơ ở mức 3%. Hệ thống Công tơ điện tử có thể truyền nhận dữ liệu qua sóng RF ở khoảng cách khoảng 15m khi có vật cản.
Tuy đã cố gắng rất nhiều nhưng không thể tránh khỏi những thiếu sót. Rất mong sự góp ý của thầy cô và các bạn để đồ án này được hoàn thiện hơn.
Nhóm tác giả xin chân thành cảm ơn quý thầy cô trong Khoa Điện tử-Viễn thông, đặc biệt là Th.S Nguyễn Văn Phòng đã hỗ trợ và tận tình hướng dẫn để chúng tôi hoàn thành tốt đồ án này.
PHÂN CÔNG NHIỆM VỤ
1. Phần chung
- Tìm hiểu lý thuyết về công tơ điện tử
- Viết báo cáo, làm slide
- Đo đạc kiểm tra tổng thể
2. Phần riêng
- Nguyễn Phú Lâm
- Thiết kế thi công module thu thập dữ liệu
- Viết chương trình giao tiếp RF
- Viết chương trình cho module thu thập dữ liệu
- Trần Quốc Việt
- Tìm hiểu lý thuyết về mạch nguồn, thiết kế mạch nguồn xung Buck
- Tìm hiểu lý thuyết về nhiễu và triệt nhiễu trong hệ thống điện tử, áp dụng vào mạch điện tử của CTĐT.
- Xây dựng và viết chương trình tìm góc lệch pha, tìm tọa độ đỉnh tín hiệu.
- Viết chương trình đo đếm điện năng và các thông số của CTĐT.
- Xử lý số liệu, khắc phục sai số hệ thống.
- Lê Công Hồng
- Tìm hiểu lý thuyết công tơ cơ, trình bày báo cáo
- Thiết kế thi công bộ đo, vẽ layout các khối
- Viết chương trình hiển thị LCD, giao tiếp EEPROM
Chương 1. TỔNG QUAN LÝ THUYẾT VỀ CÔNG TƠ ĐIỆN
1.1 Giới thiệu chương
Trong cuộc sống hiện nay, năng lượng điện có vai trò cực kỳ quan trọng, nó là xương sống trong mọi lĩnh vực công nghệ hiện đại. Đi liền với nó là đo lường điện, mà trong đó công tơ điện là một thiết bị quan trọng để đo đếm năng lượng điện, phục vụ cho quá trình mua bán điện. Chương này chúng tôi sẽ trình lý thuyết về công suất và năng lượng trong mạch điện xoay chiều một pha (mục 1.2), giới thiệu tổng quan về công tơ điện (mục 1.3), khái niệm công tơ điện là gì, phân loại và nêu ưu nhược điểm của mỗi loại công tơ điện hiện nay. Rồi từ đó đưa ra ý tưởng thực hiện đề tài, đồng thời trình bày các lý thuyết liên quan được vận dụng trong quá trình thiết kế.
1.2 Công suất và năng lượng trong mạch điện xoay chiều
Trong phạm vi đề tài này, chúng tôi chỉ giới thiệu lý thuyết công suất và năng lượng trong mạch điện xoay chiều một pha.
- Công suất trong mạch điện xoay chiều có thể biểu diễn bằng biểu thức sau:
S= P+ jQ
Trong đó: + S là công suất biểu kiến
+ P là công suất tác dụng
+ Q là công suất phản kháng của mạch
- Công suất tác dụng P được dùng để xác định năng lượng điện tiêu thụ trong quá trình mua bán điện, còn thành phần công suất phản kháng Q thường được dùng để đánh giá mức độ hiệu quả của các thiết bị điện.
- Công suất tác dụng trong mạch xoay chiều một pha được xác định như là giá trị trung bình của công suất trong một chu kỳ T:
(1.1)
Trong đó: p, u, i là các giá trị tức thời của công suất, điện áp và dòng điện trên tải.
- Trong trường hợp khi điện áp và dòng điện có hình sin thì công suất tác dụng được tính là :
(1.2)
Trong đó: + U, I là các giá trị điện áp và dòng điện hiệu dụng trên tải
+ là hệ số công suất
- Khi hệ số công suất bằng 1(khi tải là thuần trở) => công suất tác dụng sẽ bằng với công suất biểu kiến.
- Năng lượng trong mạch xoay chiều một pha:
- Năng lượng trong mạch xoay chiều một pha được tính theo biểu thức sau đây:
(1.3)
Trong đó: +là công suất tiêu thụ trên tải
+ t= t2- t1 là khoảng thời gian tiêu thụ điện
Hiện nay, công tơ điện là thiết bị đo năng lượng điện xoay chiều phổ biến nhất. Nguyên lý cấu tạo của nó dựa trên cơ sở lý thuyết về công suất và năng lượng đã được trình bày ở trên, sau đây nhóm sẽ giới thiệu kỹ hơn về các loại công tơ điện hiện nay.
1.3 Giới thiệu về công tơ điện
- Khái niệm: Công tơ điện là chiếc cân định lượng điện năng được cung cấp và tiêu thụ, làm cơ sở cho việc thanh toán giữa bên mua và bên bán theo các điều khoản đã được quy định trong hợp đồng mua bán điện. Do đó, có thể nói độ chính xác, tin cậy và ổn định trong hoạt động của các công tơ đóng vai trò hết sức quan trọng nhằm đảm bảo quyền lợi cho cả ngành điện và khách hàng trong mua bán điện năng.
- Phân loại công tơ điện
Dựa vào số pha, có thể chia công tơ điện làm 2 loại:
- Công tơ 1 pha
- Công tơ 3 pha
Dựa vào cấu tạo của công tơ điện, có thể chia làm 2 loại:
- Công tơ cơ học
- Công tơ điện tử
1.3.1 Các loại công tơ điện trên thị trường
Công tơ cơ học 1 pha của EMIC
Hình 1.1: Công tơ cơ 1 pha
Hình 1.2: Cấu tạo của công tơ cơ 1 pha
- Cuộn điện áp: được mắc song song với phụ tải, cuộn này có số vòng dây nhiều, tiết diện dây nhỏ.
- Cuộn dòng điện: được mắc nối tiếp với phụ tải, cuộn này có số vòng dây ít, tiết diện dây lớn.
- Đĩa nhôm: được gắn lên trục, tỳ vào trụ có thể quay tự do giữa 2 cuộn dây và quay tự do giữa khe hở của nam châm vĩnh cửu.
- Hộp số cơ khí: để hiển thị số vòng quay của đĩa nhôm nó được gắn với trục của đĩa nhôm.
-Nam châm vĩnh cửu: là bộ phận tạo ra mômen cản khi đĩa nhôm quay trong từ trường của nó.
1.3.2 Các ưu, nhược điểm của công tơ cơ
- Ưu điểm:
- Độ bền cao
- Giá thành rẻ, dễ lắp đặt và sử dụng
- Nhược điểm:
- Vì cấu tạo nên từ các phần từ cơ khí nên dễ gây ma sát và sai sót do các phần tử cơ khí gây ra.
- Khó tích hợp các công nghệ mới để đo đếm điện năng.
- Khi đọc chỉ số công tơ, nhân viên phải leo trụ do đó cần phải có nhiều nhân công và nhiều thời gian để thu thập dữ liệu của các công tơ, năng suất lao động thấp, và có thể xảy ra các tai nạn không mong muốn đối với nhân viên.
- Khó phát hiện được các hành vi gian lận điện năng
1.4 Giới thiệu về công tơ điện tử 1 pha
Hiện nay, trong nước có một vài đơn vị đã sản suất thành công Công tơ điện tử một pha như Tổng công ty cổ phần Thiết bị điện Việt Nam, Công ty cổ phần Thiết bị điện Vinasino và Công ty Công nghệ thông tin Điện lực miền Trung. Trong đó, sản phẩm Công tơ điện tử 1 pha kiểu DT01P-RF là sản phẩm được sử dụng phổ biến nhất.
Do vậy, trong phạm vi đồ án này chúng tôi sẽ giới thiệu Công tơ điện tử 1 pha kiểu DT01P-RF do Công ty Công Nghệ Thông Tin Điện lực Miền trung sản xuất.
Hình 1.3 Công tơ điện tử 1 pha DT01P-RF
1.4.1 Cấu tạo và nguyên lý đo đếm điện năng
Sơ đồ khối cấu tạo:
Hình 1.4 Sơ đồ khối cấu tạo của Công tơ điện tử 1 pha DT01P-RF
Nguyên tắc đo đếm điện năng:
-Công tơ hoạt động trên lưới điện một pha trực tiếp.
-Khi công tơ làm việc thì các tín hiệu điện áp và dòng điện được lấy mẫu riêng biệt bằng các khối chuyển đổi tín hiệu tương tự sang tín hiệu số. MCU sử dụng các dữ liệu tức thời này để tính toán các giá trị điện áp, dòng điện, công suất, tính toán và tích lũy điện năng tiêu thụ, hiển thị lên màn hình LCD, lưu trữ dữ liệu khi cần thiết.
- Điện năng tiêu thụ được lưu trữ trong bộ nhớ không xóa, không lập trình, không bị mất dữ liệu khi mất điện.
1.4.2 Ưu điểm của công tơ điện tử
So sánh với công tơ cơ, công tơ điện tử có nhiều ưu điểm vượt trội như:
- Độ chính xác công tơ điện tử cao hơn so với công tơ điện cơ, hoạt động tin cậy, ổn định, kết cấu nhỏ gọn, thuận tiện trong việc lắp đặt.
- Dễ dàng trong việc lưu trữ, xử lý dữ liệu
- Hỗ trợ đọc chữ số công tơ thông qua sóng RF, do đó giảm chi phí nhân công và thời gian thu thập dữ liệu điện tiêu thụ từ các công tơ, góp phần hạn chế tai nạn lao động, hạn chế được những sai sót phát sinh trong quá trình thu thập dữ liệu thủ công.
1.5 Mục tiêuđặt ra của đề tài
Dựa vào phân tích các loại công tơ đã trình bày ở trên, chúng ta thấy rằng Công tơ điện tử có những ưu điểm vượt trội so với Công tơ cơ. Do đó, với mục đích nghiên cứu, thiết kế và thi công một thiết bị Công tơ điện tử có các tính năng nổi trội có thể khắc phục các nhược điểm của Công tơ cơ, nhóm đặt ra mục tiêu của đề tài “THIẾT KẾ BỘ ĐO VÀ THU THẬP DỮ LIỆU CÔNG TƠ ĐIỆN TỬ MỘT PHA” như sau:
- Mục tiêu đối với bộ đo:
- Thiết kế bộ đo có khả năng đo công suất tải 220VAC, dòng tải nhỏ hơn 10A.
- Thiết kế bộ đo có khả năng giao tiếp không giây với bộ thu thập dữ liệu.
- Thiết kế bộ đo có khả năng gửi các thông số độ lệch pha, công suất tức thời, dòng điện và điện áp hiệu dụng, tần số điện năng tiêu thụ đến bộ thu thập dữ liệu.
- Thiết kế bộ đo hoạt động ổn định và có sai số nhỏ hơn 3%.
- Tạo ra bộ đo công tơ điện tử có thể phục cho nghiên cứu và học tập.
- Mục tiêu đối với bộ thu thập dữ liệu
- Thiết kế bộ thu thập dữ liệu giao tiếp với bộ đo, nhận các thông số độ lệch pha, công suất tức thời, dòng điện và điện áp hiệu dụng, điện năng tiêu thụ từ bộ đo.
1.6 Ý tưởng thực hiện đề tài
1.6.1 Ý tưởng thực hiện bộ đo
Xuất phát từ công thức P=UIcos(φ), nhóm nhận thấy để tìm được công suất P thì cần biết ba đại lượng U, I và φ. Trong đó, góc lệch pha φ có thể tính được khi biết được dạng tín hiệu của dòng điện và điện áp. Vậy phải sử dụng vi điều khiển có ít nhất hai kênh ADC để thực hiện lấy mẫu u(t) và i(t).
Nhu cầu giao tiếp không dây trong đề tài này có khoảng cách vừa phải nên nhóm quyết định sử dụng module RF để thực hiện chức năng giao tiếp không giây.
Từ ý tưởng như trên nhóm đưa ra sơ đồ khối bộ đo Công tơ điện tử như sau:
Hình 1.5 Sơ đồ khối của bộ đo
Nhiệm vụ các khối:
-Kênh đo dòng điện: Khối này có nhiệm vụ biến đổi dòng diện qua tải thành mứcđiện áptương ứng để đưa vào bộ chuyển đổi tương tự sang số của MCU
- Kênh đo điện áp: Có nhiệm vụ phân áp từ điện áp lưới cung cấp cho tải để chuyển thành mức điện áp phù hợp với thang điện áp hoạt động của bộ chuyển đổi tương tự số của MCU
- Khối MCU: Là khối xử lý trung tâm của hệ thống, có nhiệm vụ nhận tín hiệu từ kênh dòng điện và điện áp sau đó chuyển đổi sang tín hiệu số, tính toán công suất tiêu thụ. Giao tiếp với khối RF để truyền dữ liệu thông qua sóng RF. Giao tiếp với EEPROM để ghi và đọc giá trị điện năng tiêu thụ, chống mất dữ liệu khi mất điện. Giao tiếp với LCD để hiển thị các thông tin cần thiết cho người sử dụng.
- Khối LCD: Hiển thị chỉ số điện năng tiêu thụ của công tơ.
- Khối RF: Là kênh giao tiếp RF của hệ thống, hoạt động ở cả 2 chế độ truyền và nhận.
- Khối EEPROM: lưu dữ liệu điện năng tiêu thụ, đảm bảo dữ liệu không bị xóa khi mất nguồn cung cấp.
- Khối nguồn: Có nhiệm vụ cung cấp nguồn cho toàn bộ hệ thống.
1.6.2 Ý tưởng thực hiện bộ thu thập dữ liệu
Hình 1.6 Sơ đồ khối của bộ thu thâp dữ liệu
Chức năng các khối:
-Khối Vi điều khiển: Là khối xử lý, điều khiển trung tâm của bộ thu thập dữ liệu. Giao tiếp với khối RF để nhận dữ liệu thông qua sóng RF. Đồng thời xử lý dữ liệu, hiển thị ra LCD. Giao tiếp với khối ngoại vi để người sử dụng có thể điều khiển các thông tin hiển thị khác nhau.
-Khối LCD: Hiển thị các thông tin như mã số công tơ, điện năng tiêu thụ, điện áp, dòng điện định mức, góc lệch pha, tần số điện.
-Khối RF: Là kênh giao tiếp RF với bộ đo công tơ điện, hoạt động ở chế độ nhận.
-Khối nguồn: Có nhiệm vụ cung cấp nguồn cho module cầm tay( sử dụng pin 9V).
1.7Lý thuyết về hiệu ứng Hall
Trong đề tài này, ở kênh đo dòng điện chúng tôi đo dòng điện qua tải bằng cảm biến dòng ASC712 hoạt động dựa trên hiệu ứng Hall, do đó sau đây chúng tôi sẽ giới thiệu về lý thuyết hiệu ứng Hall.
- Khái niệm:
- Hiệu ứng Hall là một hiệu ứng vật lý được thực hiện khi áp dụng một từ trường vuông góc lên một bản làm bằng kim loại hay chất bán dẫn hay chất dẫn điện nói chung (thanh Hall) đang có dòng điện chạy qua. Lúc đó ta nhận được hiệu điện thế (hiệu thế Hall) sinh ra tại hai mặt đối diện của thanh Hall. Tỷ số giữa hiệu thế Hall và dòng điện chạy qua thanh Hall gọi là điện trở Hall, đặc trưng cho vật liệu làm nên thanh Hall. Hiệu ứng này được khám phá bởi Edwin Herbert Hall vào năm 1879.
Hình 1.7: Nguyên lý hiệu ứng Hall khi chưa có từ trường (a) và khi có từ trường (b)
- Hình 1.7(a) thể hiện nguyên lý cơ bản của hiệu ứng Hall. Nếu một tấm vật liệu bán dẫn mỏng (phần tử Hall) có dòng điện chạy qua nó và ta kết nối ngõ ra vuông góc với chiều của dòng điện,khi không có từ trường đặt vào, sự phân bố dòng sẽ không đổi và không có sự khác biệt về điện áp ở ngõ ra.
- Khi đặt một từ trường vuông góc vào như hình (b), một lực Lorent tác dụng lên dòng điện. Lực này sẽ làm nhiễu loạn sự phân bố dòng điện, kết quả là tạo sự khác biệt về điện áp ở ngõ ra. Điện áp này được gọi là điện áp Hall.
Công thức liên hệ giữa hiệu thế Hall, dòng điện và từ trường là:
VH= IB/(den)
Trong đó: + VH là hiệu thế Hall.
Đơn vị: Volt (V)
+ I là cường độ dòng điện.
Đơn vị: Ampere (A)
+ B là cường độ từ trường.
Đơn vị : Tesla (T)
+ d là độ dày của thanh Hall.
Đơn vị : Mét (m)
+ e là điện tích của hạt mang điện chuyển động trong thanh Hall.
Đơn vị: Coulomb (C)
+ n mật độ các hạt mang điện trong thanh Hall.
Đơn vị: 1/m3
1.8 Nhiễu và các cách triệt nhiễu trong mạch điện tử
Trong bất kỳ một mạch điện tử nào, độ ổn định của mạch luôn là vấn đề được quan tâm hàng đầu, đặc biệt là trong các hệ thống đo lường, do đó vấn đề chống nhiễu để đảm bảo độ ổn định cho mạch là rất quan trọng. Trong phần này, nhóm sẽ giới thiệu lý thuyết về nhiễu và các cách chống nhiễu trong mạch điện tử để làm cơ sở cho quá trình thiết kế các mạch điện tử trong đề tài.
1.8.1 Nhiễu trong mạch điện tử
Nhiễu gồm rất nhiều loại được chia theo nhiều khía cạnh khác nhau, trong đề tài này vì đặc điểm của thiết bị CTĐT được sử dụng trong điều kiện ngoài trời, dễ bị tác động bởi nhiều nguồn nhiễu khác nhau, vậy nên trong đề tài này nhóm sẽ xem xét các nguồn nhiễu dựa trên nguồn gây nhiễu và cách thức tác động của nguồn gây nhiễu đối với hệ thống điện tử.
Hình 1.8 Nhiễu trong mạch điện tử
Nếu chia theo nguồn gây nhiễu thì có thể chia nhiễu là làm hai loại như hình 1.8, bao gồm nhiễu vi sai và nhiễu cách chung.
1.8.1.1 Nhiễu vi sai
Là loại nhiễu có cùng điểm đất với mạch điện tử, ở trong mạch điện tử nó sẽ tạo ra dòng điện khép kín đi từ nơi có điện áp cao về nơi có điện áp thấp.
Hình 1.9 Nhiễu vi sai
Loại nhiễu này thường được gây ra bởi các thiết bị trong chính hệ thống điện tử, hoặc là do nhiễu ở nguồn cung cấp cho hệ thống điện tử.
1.8.1.2 Nhiễu cách chung
Là loại nhiễu khác điểm đất với mạch điện tử, ở trong mạch điện tử nó không tạo ra dòng điện khép kín mà sẽ đi cùng chiều trên tất cả các điểm của mạch về điểm đất của nó, tức là dòng điện do nhiễu gây ra sẽ đi song song cùng chiều trên các đường tín hiệu của hệ thống điện tử.
Hình 1.10 Nhiễu cách chung
Loại nhiễu này thường được gây ra bởi các hệ thống điện tử khác đặt lân cận hệ thống điện tử đang xét.
1.8.2 Triệt nhiễu trong hệ thống điện tử
1.8.2.1 Triệt nhiễu vi sai
Một phương pháp triệt nhiễu vi sai phổ biến mà được dùng trong hầu hết các hệ thống điện tử đó là sử dụng tụ điện và cuộn cảm được mắc như hình 1.11.
Hình 1.11 Cách sử dụng tụ lọc để triệt nhiễu vi sai
Tụ điện C và cuộn cảm L phải được thiết kế sao cho đối với tần số làm việc bình thường của mạch thì dung kháng tụ C rất lớn và cảm kháng của cuộn cảm L rất bé cho nên mạch vẫn hoạt động bình thường. Đối với tần số nhiễu thì lúc này dung kháng tụ C rất bé còn cảm kháng của cuộn cảm L lớn, lúc đó tụ C được xem như là nối tắt nên tín hiệu nhiễu sẽ qua tụ về điểm mass, còn trở kháng cuộn cảm rất lớn để cách ly nguồn nhiễu với tải, do đó bảo vệ hệ thống điện tử trước ảnh hưởng của nhiễu.
1.8.2.2Triệt nhiễucách chung
Trong đề tài này nhóm xin giới thiệu phương pháp triệt nhiễu cách chung sử dụng cuộn cảm bẫy. Cấu tạo của cuộn cảm bẫy gồm hai cuộn cảm được ghép cùng chiều và chung lõi như hình sau:
Hình 1.12 Hoạt động và cấu tạo của cuộn cảm bẫy
- Khi hệ thống chịu ảnh hưởng của nhiễu cách chung thì bên trong hai cuộn cảm sinh ra một từ thông cùng chiều, do đó từ thông trong lõi cuộn dây bị biến thiên mạnh, điều này gây ra một sức điện động lớn đặt vào hai đầu cuộn dây , có nghĩa là trở khảng của cuộn dây khi đó tăng lên rất lớn, do đó toàn bộ năng lượng do nhiễu gây ra sẽ được đặt hết lên cuộn dây bẫy, do đó bảo vệ được hệ thống điện tử khỏi ảnh hưởng của nhiễu cách chung.
- Khi hệ thống chịu ảnh hưởng của nhiễu vi sai thì bên trong hai cuộn dây sẽ tạo ra hai từ thông ngược chiều nhau có độ lớn bằng nhau, hai từ thông ngược chiều sẽ triệt tiêu nhau bên trong lõi chung của hai cuộn dây, do đó hầu như không có sự biến thiên từ trường nào vậy nên suất điện động đặt vào hai cuộn dây gần như bằng không, cảm kháng hai đầu của cuộn dây bằng không, vậy nên không ảnh hưởng gì đến hoạt động của hệ thống điện tử.
1.9 Lý thuyết về mạch nguồn
Mạch nguồn là một phần kinh điển trong hệ thống điện tử, để có một hệ thống điện tử tốt thì nhất thiết phải có mạch nguồn ổn định. Vậy nên ở phần này nhóm xin giới thiệu những hiểu biết của nhóm về các loại mạch nguồn để từ đó đưa ra phương án thiết kế nguồn cho CTĐT.
1.9.1 Nguồn ổn áp tuyến tính
Đặc điểm:
- Là loại mạch nguồn sử dụng Opamp để ổn định điện áp ngõ ra, Opamp so sánh được dùng để điều khiển một BJT làm việc ở vùng tuyến tính, khi hoạt động thì Opamp và BJT dường như hoạt động liên lục nên điều này gây công suất tiêu tán trên mạch lớn nhưng bù lại chất lượng điện áp ngõ ra ổn định. Nguyên lý hoạt động của loại nguồn này được mô tả như hình dưới.
Hình 1.13 Nguyên lý hoạt động của nguồn ổn áp tuyến tính
Từ sơ đồ nguyên lý trên ta thấy điện áp ở ngõ vào phải lớn hơn điện áp ngõ ra mong muốn, trong quá trình hoạt động lượng năng lượng ứng với lượng điện áp chênh lệch này sẻ bị tiêu tán trên mạch regulator, nên nhược điểm của mạch này là tiêu tán công suất lớn và tỏa nhiều nhiệt.Thường thì điện áp ngõ vào lớn hơn từ 1 đến 3VDC so với điện áp ngõ ra mong muốn.
- Các mạch tương tự thường nhạy cảm với nhiễu nên nó yêu cầu nguồn chất lượng tốt, độ ổn định của điện áp ngõ ra càng lớn thì càng tốt, vậy nên với mạch tương tự thì nguồn ổn áp tuyến tính là sự lựa chọn hợp lý. Thị trường có cung cấp các IC phục vụ cho kiểu ổn áp này là: LM78xx, LM1117 xx.
Ưu điểm:
- Chi phí thấp, dể dàng để sử dụng hơn so với ổn áp xung.
- Tạo điện áp ngõ ra ổn định, ít nhiễu.
- Thích hợp với các mạch nhạy cảm với nhiễu và công suất thấp như mạch tương tự.
Nhược điểm:
- Công suất tiêu tán bởi nhiệt lớn dẫn đến làm giảm thời lượng sử dụng pin của thiết bị nên nó không thích hợp với những mạch đòi hỏi điện áp cao và dòng lớn.
- Đòi hỏi phải tản nhiệt tốt dẫn đến cồng kềnh.
- Vì Opamp và BJT phải hoạt động liên tục nên để đảm bảo đáp ứng tốc độ làm việc đó thì BJT không được ghép kiểu darlington do đó dòng ngõ ra của loại nguồn này thường nhỏ, nếu muốn có dòng lớn thì ta thường phải ghép thêm mạch rẽ dòng rất cồng kềnh.
1.9.2 Nguồn ổn áp xung Buck
Đặc điểm:
Hình 1.14 Nguyên lý hoạt động của IC nguồn ổn áp xung H34063
- Về mặt nguyên lý hoạt động thì nguồn ổn áp xung hoạt động tương tự như nguồn ổn áp tuyến tính, nhưng thay vì điều khiển BJT đóng tắt trực tiếp bằng Opamp so sánh thì nguồn ổn áp xung chỉ cho phép BJT hoạt động khi khi có đủ hai điều kiện là Opamp Comparator cho phép BJT hoạt động và BJT sẽ hoạt động theo tần số của khối Oscillator, điều này dẫn tới chất lượng ngõ ra của loại mạch nguồn này không ổn định như mạch nguồn ổn áp tuyến tính nhưng nó giảm được công suất tiêu tán .
Hình 1.15 Mạch nguồn ổn áp xung sử dụng IC H34063
- Nguyên lý chuyển đổi mức điện áp là lưu trữ năng lượng ngõ vào tại một mức điện áp ngõ vào xác định A VDC rồi sau đó cung cấp năng lượng tại ngõ ra tại một mức điện áp khác B VDC, với B luôn luôn nhỏ hơn A. Năng lượng được lưu trữ dưới dạng từ trường hoặc điện trường.
- Chuyển từ điện áp DC sang dạng xung vuông có tần số bằng tần số khối dao động bằng cách điều khiển BJT,sau đó đưa xung AC này đến mạch lưu trữ năng lượng gồm diode, cuộn cảm, tụ điện.Mạch này tạo thành nguồn phụ cung cấp điện áp cho tải khi BJT tắt.
Ưu điểm:
- Phương án này hiệu quả về công suất hơn so với ổn áp tuyến tính, giảm 75% đến 98% năng lượng tiêu tán không mong muốn bởi nhiệt, do vậy làm tăng thời lượng sử dụng pin cho thiết bị.
Nhược điểm:
-Khó sử dụng.
- Chất lượng điện áp ngõ ra không cao như mạch nguồn ổn áp tuyến tính, do đó không phù hợp với các thiết bị tương tự.
1.9.3 Lựa chọn phương án thiết kế mạch nguồn
Sau khi tiến hành tìm hiểu và giới thiệu hai loại mạch nguồn như đã trình bày ở trên, nhóm nghiên cứu đưa ra phương án thiết kế mạch nguồn hiệu quả nhất đối với đề tài.
Yêu cầu thiết kế mạch nguồn cho công tơ điện tử phải cung cấp được hai ngõ ra 3.3VDC và 5VDC, căn cứ vào ưu nhược điểm của hai loại mạch nguồn đã nêu ở chương 2, nhóm đưa ra phương án thiết kế mạch nguồn là:
- Chuyển điện áp AC thành DC: Bằng phương pháp cách ly, đảm bảo an toàn. Sử dụng biến áp, cầu diode, tụ nắn chuyển 220VAC/50Hz thành 17VDC.
- Chuyển điện áp DC thành DC cho ngoại vi: Để Giảm công suất tiêu tán, đảm bảo tuổi thọ của các linh kiện mạch nguồn. Điện áp 17DC sẽ được chuyển thành mức điện áp DC thấp hơn 5VDC bằng nguồn ổn áp xung. Có thể làm được điều này vì mức điện áp 5VDC chỉ dùng cho các thiết bị ngoại vi LCD, LED nên không cần chất lượng nguồn tốt.
- Chuyển mức điện áp DC sang DC sử dụng cho vi điều khiển: Điện áp 5VDC được chuyển thành mức điện áp 3.3VDC bằng loại nguồn ổn áp tuyến tính. Nhất thiết phải làm điều này vì nguồn 3.3VDC cung cấp cho vi điều khiển yêu cầu chất lượng phải tốt để đảm bảo cho bộ SD24 hoạt động chính xác nhất có thể. Trong đề tài nhóm sử dụng IC regulator LM1117.
1.10 Lý thuyết thiết kế mạch nguồn ổn áp xung Buck
Như đã trình bày ở phần ưu nhược điểm của mạch nguồn ổn áp xung thì nhược điểm của mạch này là khó sử dụng, nên ở phần này nhóm sẽ trình bày nguyên lý hoạt động và thiết kế cho mạch nguồn kiểu này.
1.10.1 Chế độ hoạt động mạch nguồn ổn áp xung
Ở đề tài này nhóm chỉ sử dụng chế độ liên tục là chế độ hoạt động mà ở đó dòng qua cuộn cảm (IL) không bao giờ chạm mức 0A trong suốt quá trình làm việc của bộ nguồn. Sơ đồ dạng tín hiệu như dưới:
Hình 1.16 Dạng tín hiệu mạch nguồn ổn áp xung ở chế độ hoạt động liên tục
Sơ đồ làm việc nguyên lý của chế độ này như hình.
Hình 1.17 Mạch nguyên lý của nguồn ổn áp xung
Khi mà khóa S đóng, thì điện áp rơi trên cuộn dây , dòng qua cuộn dây tăng dần lên, lúc này diode D phân cực ngược.
Khi mà khóa S mở, diode D phân cực thuận, nếu coi sụt áp trên diode là không có thì dòng qua cuộn dây giảm dần.
Năng lượng lưu trữ trong cuộn dây: (1.1)
Do đó, năng lượng được lưu trữ trong khoảng thời gian khóa S đóng, IL tăng năng lượng tăng và được xã ở ngõ ra của bộ Buck trong khoảng thời gian khóa S mở IL giảm năng lượng giảm.
Mặt khác điện áp rơi trên cuộn dây được tính theo công thức: (1.2)
Do đó, dòng qua cuộn dây khi S đóng được cho bởi công thức:
(1.3)
Tương tự, dòng qua cuộn dây khi S mở được cho bởi công thức:
(1.4)
Giả sử rằng nguồn Buck hoạt động ở chế độ ổn định, khi đó năng lượng trong cuộn dây tại thời điểm t=0 bằng với năng lượng trong cuộn dây tại thời điểm t=T.
khi đó: vậy , đặt vậy (1.5)
Từ (1.5) ta thấy răng luôn luôn nhỏ hơn , phụ thuộc vào và để chọn tần số làm việc phù hợp cho mạch nguồn Buck.
1.10.2 Cách thiết kế linh kiện cho mạch nguồn ổn áp xung Buck
- Cuộn cảm L:
Khóa S đóng : (1.6)
Khóa S mở : (1.7)
Mặt khác:
(1.8)
Từ (1.5) và (1.8) (1.9)
- Tụ điện C:
, theo hình 1.16 thì (1.10)
Dòng nạp cho tụ: (1.11)
Gọi là độ gợn điện áp đỉnh đỉnh: (1.12)
1.11 Lý thuyết về sai số phép đo
Đối với thiết bị đo lường như CTĐT thì việc xác định sai số (độ tin cậy) của thiết bị đo là một nhiệm vụ quan trọng trong quá trình thực hiện đề tài. Sai số của một thiết bị đến từ nhiều nguyên nhân, trong đó hai nguyên nhân chủ yếu là sai số do dụng cụ đo và sai số trong việc thực hiện đo (phương pháp đo và mức độ cần thận của người đo). Do vậy kết quả đo thường không chính xác với đại lượng đo mà luôn luôn tồn tại sai số.
Như đã nói ở trên thì sai số phép đo gồm có hai thành phần, sai số hệ thống có thể không đổi hoặc thay đổi có qui luật và sai số ngẫu nhiên không có qui luật. trong quá trình đo hai loại sai số này xuất hiện đồng thời, nên sai số ∆X được biểu diễn dưới dạng tổng của hai loại sai số đó. ∆X = θ + ∆, với θ là sai số hệ thống và ∆ là sai số ngẫu nhiên. Để nhận được kết quả đo với sai số ít nhất thì cần thực hiện nhiều phép đo với một đại lượng đo và thực hiện xử lý kết quả đo.
- Tính toán sai số ngẫu nhiên: dựa vào độ lớn của giá trị đo có thể xác định được sai số ngẫu nhiên dựa vào phương pháp toán học thống kê và lý thuyết xác xuất.
Nhiệm vụ của việc tính toán sai số ngẫu nhiên là chỉ rõ giới hạn của sai số của kết quả đo khi thực hiện phép đo nhiều lần. như vậy phép đo nào có kết quả với sai số ngẫu nhiên vượt quá giới hạn của phép đo sẽ bị loại bỏ.
- Cơ sở toán học: việc tính toán sai số ngẫu nhiên tuân theo luật phân bố chuẩn Gauss, nội dung định luật như sau “sai số ngẫu nhiên nếu vượt quá một giới hạn nào đó thì xác suất xuất hiện sẽ bằng không, do đó phép đo nào cho kết quả vượt qua giới hạn đó sẽ bị loại bỏ”.
- Cách tính sai số ngẫu nhiên:
Xét n phép đo với kết quả thu được là x1,x2 ….xN.
+ Tính kỳ vọng toán học của đại lượng đo:
MX == (1.13)
Chính là giá trị trung bình của n kết quả đo.
+ Tính độ lệch kết quả mỗi lần đo so với trị trung bình:
(1.14)
Còn gọi là sai số dư.
+ Tính khoảng giới hạn của sai số ngẫu nhiên:
∆ss = (1.15)
+ Tính khoảng tin cậy của sai số ngẫu nhiên:
Vì trong đề tài này với mỗi đối tượng đo nhóm tiến hành số phép đo ít
hơn 20 mẫu nên khoảng tin cậy được tính như sau:
∆’ss = ∆ss.hst= hst. (1.16)
Với hst là hệ số phân bố Student.
+ Xử lý kết quả đo:
Kết quả đo nào có sai số dư nằm ngoài khoảng [ - ∆ss: + ∆ss] sẽ bị
loại.
- Loại trừ sai số hệ thống: cộng hoặc nhân một phần giá trị vào kết quả đo để loại bỏ sai số hệ thống.
1.12 Kết luận chương
Nội dung chương 1 đã trình bày sơ lược về vai trò của công tơ điện. Đồng thời cũng giới thiệu cấu tạo của công tơ cơ 1 pha và 3 pha và của công tơ điện tử. Qua đó, ta thấy rằng công tơ điện tử có rất nhiều ưu điểm vượt trội so với công tơ cơ. Đồng thời, dựa vào đó nhóm đã xác định các yêu cầu cần thực hiện của đề tài. Đưa ra ý tưởng thực hiện ban đầu cho đề tài, ý tưởng thực hiện nhìn chung vẫn bao gồm các khối tương tự như sản phẩm của Công ty Công nghệ thông tin Điện lực Miền Trung. Nhưng phương thức thực hiện thì nhóm thực hiện theo phân tích của nhóm và sẽ được trình bày chi tiết ở các chương sau. Sau đó nhóm cũng trình bày về lý thuyết được vận dụng trong quá trình thực hiện đề tài.
Chương 2. TÌM HIỂU CÁC LINH KIỆN TRONG ĐỀ TÀI
2.1 Giới thiệu chương
Trong chương này, chúng tôi xin trình bày lý thuyết về cấu trúc phần cứng các linh kiện chính sử dụng trong thiết kế như vi điều khiển MSP430 (mục 2.2), màn hình LCD (mục 2.3), EEPROM (mục 2.4), module RF (mục 2.5 ).
2.2 Vi điều khiển MSP430
Căn cứ vào yêu cầu của đề tài: vi điều khiển cần có bộ chuyển đổi tương tự sang số với độ chính xác cao, có hỗ trợ các chuẩn giao tiếp I2C và SPI, yêu cầu phải tiết kiệm năng lượng và có giá cả phù hợp nên nhóm đã chọn vi điều khiển MSP430F6736 thuộc họ Vi điều khiển MSP430 của hãng TI để thực hiện trong đề tài . MSP430F6736 là sản phẩm cuối cùng thuộc họ MSP430F67xx, nó cung cấp các đặc tính mới và thiết kế chuyên biệt hỗ trợ việc đo lường 1 pha, 3 pha. MSP430F6736 hoạt động mạnh mẽ với CPU 25MHz, có bộ chuyển đổi ADC lên đến 24 bit dựa trên cấu trúc sigma-delta là bộ ADC có độ phân giải cao nhất hiện nay. Ngoài ra nó còn hỗ trợ nhiều ngõ vào analog cho phép đo đồng thời trong một lần kích khởi. Ở các bộ ADC thông thường yêu cầu điện áp cần đo ổn định trong một khoảng thời gian khá dài, tuy nhiên bộ ADC sigma-delta có bộ lọc nhiễu có thể đo được các điện áp thay đổi với tần số thấp thích hợp cho việc đo điện áp xoay chiều trong công tơ điện. Mặt khác với cấu trúc phần cứng RISC hỗ trợ việc nhân 32bit x 32bit, do vậy tăng tốc độ tính toán cho công tơ điện tử.
2.2.1 Tổng quan về dòng vi điều khiển MSP430
MSP430là họ vi điều khiển 16 bits, với các ngoại vi và hệ thống bộ định thời linh hoạt được kết nối với nhau theo cấu trúc VON-NEUMANN. Đây là một bộ xử lý hiện đại với các module bộ nhớ tương tự và những kết nối ngoại vi tín hiệu số, MSP430 đã đưa ra được những giải pháp tốt cho những nhu cầu ứng dụng với nhiều phiên bản khác nhau.
MSP430 có một số phiên bản như: MSP430x1xx, MSP430x2xx, MSP430x3xx, MSP430x4xx, MSP430x5xx và MSP430x6xx.
Dưới đây là những đặc điểm tổng quát của họ vi điều khiển MSP430:
- Cấu trúc sử dụng nguồn thấp giúp kéo dài tuổi thọ của Pin
- Duy trì dòng 0.1µA nuôi RAM.
- Duy trì dòng 0.8µA Real- Time Clock.
- Bộ chuyển đổi tương tự số hiệu suất cao cho các phép đo chính xác
- 12 bit hoặc 10 bit ADC.
- 12 bit DAC.
- 24-bit Sigma-Delta ADCs
- 16 bit RISC CPU cho phép thực hiện nhiều ứng dụng một cách dễ dàng.
- Thiết kế nhỏ gọn làm giảm lượng tiêu thụ điện và giảm giá thành.
- Tối ưu hóa cho những chương trình ngôn ngữ bậc cao như C, C++
- Hỗ trợ nhiều chế độ ngắt khác nhau.
Hình 2.1: Sơ đồ cấu trúc vi điều khiển MSP430F673xIPN
2.2.2. Không gian địa chỉ
Cấu trúc vi điều khiển MSP430 có một không gian nhớ được chia sẽ với các thanh ghi chức năng đặc biệt (SFRs), các bộ ngoại vi, RAM, và bộ nhớ Flash/ROM được biểu diễn trên hình vẽ 2.2. Việc truy cập mã chương trình luôn luôn được thực hiện trên một địa chỉ chẵn. Dữ liệu có thể được truy cập như là những Byte hay những Word.
Hình 2.2 Tổ chức bộ nhớ của vi điều khiển MSP430
2.2.2.1. Flash/ROM
Địa chỉ bắt đầu của Flash/ROM phụ thuộc vào số lượng Flash/ROM hiện có và thay đổi tùy theo từng loại chip. Flash/ROM được sử dụng để lưu chương trình. Những bảng Word hay Byte có thể được cất và sử dụng trong Flash/ROM mà không cần bảng sao chép tới RAM trước khi sử dụng chúng.
2.2.2.2. RAM
RAM có địa chỉ bắt đầu tại 0200h. Địa chỉ kết thúc của RAM phụ thuộc vào một số lượng RAM có và thay đổi tùy thuộc vào từng dòng vi điều khiển. RAM được sữ dụng để lưu trữ dữ liệu hiện hành của chương trình.
2.2.2.3. Những khối ngoại vi
Những module giao tiếp ngoại vi được quản lý trong không gian địa chỉ từ 0100h tới 01FFh, không gian này chỉ dành riêng cho module ngoại vi 16 bit. Không gian địa chỉ từ 010h tới 0FFh được dành riêng cho module ngoại vi 8 bit.
2.2.2.4. Những thanh ghi chức năng đặc biệt (SFR)
Một vài chức năng ngoại vi được cấu hình trong thanh ghi chức năng đặc biệt. Những thanh ghi chức năng đặc biệt được nằm trong 16 byte thấp của không gian địa chỉ. Những SFR phải được truy cập bằng việc sử dụng câu lệnh byte.
Đề tài: THIẾT KẾ BỘ ĐO VÀ THU THẬP DỮ LIỆU CÔNG TƠ ĐIỆN TỬ MỘT PHA
1. Giới thiệu đề tài
Hiện nay công tơ cơ là thiết bị chủ yếu phục vụ cho quá trình mua bán điện, tuy nhiện sau một thời gian sử dụng nó đã bộc lộ một số nhược điểm như:
- Vì cấu tạo nên từ các phần từ cơ khí nên dễ gây ma sát và sai sót do các phần tử cơ khí gây ra.
- Khó tích hợp các công nghệ mới để đo đếm điện năng.
- Khi đọc chỉ số công tơ, nhân viên phải leo trụ do đó cần phải có nhiều nhân công và nhiều thời gian để thu thập dữ liệu của các công tơ, năng suất lao động thấp, và có thể xảy ra các tai nạn không mong muốn đối với nhân viên.
- Khó phát hiện được các hành vi gian lận điện năng
Để khắc phục các nhược điểm trên của công tơ cơ, một số đơn vị đã nghiên cứu và chế tạo thành công công tơ điện tử. Ban đầu đưa vào sử dụng đã thể hiện được rất nhiều ưu điểm nổi bật như:
- Độ chính xác công tơ điện tử cao hơn so với công tơ điện cơ, hoạt động tin cậy, ổn định, kết cấu nhỏ gọn, thuận tiện trong việc lắp đặt.
- Dễ dàng trong việc lưu trữ, xử lý dữ liệu
- Hỗ trợ đọc chữ số công tơ thông qua sóng RF, do đó giảm chi phí nhân công và thời gian thu thập dữ liệu điện tiêu thụ từ các công tơ, góp phần hạn chế tai nạn lao động, hạn chế được những sai sót phát sinh trong quá trình thu thập dữ liệu thủ công.
Tuy nhiên sản phẩm công tơ điện tử vẫn còn rất mới mẻ và cần được nghiên cứu, hoàn thiện hơn nữa để đáp ứng nhu cầu hiện nay. Với mong muốn nghiên cứu và tạo ra một sản phẩm thực tế, đồng thời tiếp cận các công nghệ của công tơ điện tử nên nhóm đã chọn đề tài: “THIẾT KẾ BỘ ĐO VÀ THU THẬP DỮ LIỆU CÔNG TƠ ĐIỆN TỬ MỘT PHA” để thực hiện trong Đồ án tốt nghiệp này.
Mục tiêu đề tài:
- Mục tiêu đối với bộ đo:
- Thiết kế bộ đo có khả năng đo công suất tải 220VAC, dòng tải nhỏ hơn 10A.
- Thiết kế bộ đo có khả năng giao tiếp không giây với bộ thu thập dữ liệu.
- Thiết kế bộ đo có khả năng gửi các thông số độ lệch pha, công suất tức thời, dòng điện và điện áp hiệu dụng, điện năng tiêu thụ đến bộ thu thập dữ liệu.
- Thiết kế bộ đo hoạt động ổn định và có sai số nhỏ hơn 3%.
- Tạo ra bộ đo công tơ điện tử có thể phục cho nghiên cứu và học tập.
- Mục tiêu đối với bộ thu thập dữ liệu
- Thiết kế bộ thu thập dữ liệu giao tiếp với bộ đo, nhận các thông số độ lệch pha, công suất tức thời, dòng điện và điện áp hiệu dụng, điện năng tiêu thụ từ bộ đo.
2. Ý tưởng thực hiện đề tài
- Ý tưởng thực hiện bộ đo:
Hình 1 Sơ đồ khối của bộ đo
Chức năng các khối:
- Kênh dòng điện: Khối này có nhiệm vụ biến đổi dòng diện qua tải thành mứcđiện áptương ứng để đưa vào bộ chuyển đổi tương tự sang số của Vi điều khiển.
- Kênh điện áp: Có nhiệm vụ phân áp từ điện áp lưới cung cấp cho tải để chuyển thành mức điện áp phù hợp với thang điện áp hoạt động của bộ chuyển đổi tương tự số của Vi điều khiển.
- Khối Vi điều khiển: Là khối xử lý trung tâm của hệ thống, có nhiệm vụ nhận tín hiệu từ kênh dòng điện và điện áp sau đó chuyển đổi sang tín hiệu số, tính toán công suất tiêu thụ. Giao tiếp với khối RF để truyền dữ liệu thông qua sóng RF. Giao tiếp với EEPROM để ghi và đọc giá trị điện năng tiêu thụ, chống mất dữ liệu khi mất điện. Giao tiếp với LCD để hiển thị các thông tin cần thiết cho người sử dụng.
- Khối LCD: Hiển thị các thông tin như mã số công tơ, chỉ số hiện tại của công tơ.
- Khối RF: Là kênh giao tiếp RF của hệ thống, hoạt động ở cả 2 chế độ truyền và nhận.
- Khối EEPROM: lưu trữ dữ liệu điện năng tiêu thụ, đảm bảo dữ liệu không bị xóa khi mất nguồn cung cấp.
- Khối nguồn: Có nhiệm vụ cung cấp nguồn cho toàn bộ hệ thống.
- Ý tưởng thực hiện bộ thu thập dữ liệu:
Hình 2 Sơ đồ khối của bộ thu thâp dữ liệu
Chức năng các khối:
-Khối Vi điều khiển: Là khối xử lý, điều khiển trung tâm của bộ thu thập dữ liệu. Giao tiếp với khối RF để nhận dữ liệu thông qua sóng RF.Đồng thời xử lý dữ liệu, hiển thị ra LCD. Giao tiếp với khối ngoại vi để người sử dụng có thể điều khiển các thông tin hiển thị khác nhau
-Khối LCD: Hiển thị các thông tin như mã số công tơ, điện năng tiêu thụ, điện áp, dòng điện định mức, góc lệch pha, tần số điện.
-Khối RF: Là kênh giao tiếp RF với bộ đo công tơ điện, hoạt động ở chế độ nhận.
-Khối nguồn: Có nhiệm vụ cung cấp nguồn cho module cầm tay( sử dụng pin 9V).
3. Quá trình thực hiện
Sau quá trình thiết kế và thi công kiểm tra hoạt động phần cứng của bộ đo và bộ thu thập dữ liệu. Mạch thực tế của bộ đo và bộ thu thập dữ liệu như sau:
Hình 3 Mạch thực tế của bộ đo và bộ thu thập dữ liệu
Tiếp theo nhóm đã tiến hành thiết kế phần mềm cho bộ đo và bộ thu thập dữ liệu.
Sơ đồ thuật toán chương trình chính của bộ đo:
Hình 4 Sơ đồ thuật toán của chương trình chính của bộ đo và bộ thu thập dữ liệu
4. Kết quả đạt được
Sau quá trình thực hiện, hệ thống Công tơ điện tử đã cơ bản hoạt động đúng với yêu cầu đặt ra ban đầu. Hệ thống thu phát RF đã thu được dữ liệu từ Công tơ bao gồm các thông tin: mã số công tơ, chỉ số điện năng tiêu thụ, giá trị điện áp và dòng điện tức thời trên tải và thông số về độ lệch pha của điện áp và dòng điện hiện tại trên tải. Sau quá trình kiểm tra khoảng cách truyền RF thì hệ thống truyền nhận tốt trong vòng khoảng 15m khi có vật cản và khoảng 30m khi không có vật cản.
Tuy nhiên, đề tài vẫn còn chưa hoàn thiện, cụ thể là chưa khắc phục được sai số hệ thống, nhóm sẽ bổ sung kết quả sớm nhất có thể.









