ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử ĐIỀU KHIỂN MOBILE ROBOT BẰNG CẢM BIẾN GIA TỐC






NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử ĐIỀU KHIỂN MOBILE ROBOT BẰNG CẢM BIẾN GIA TỐC
MỞ ĐẦU
Trong những năm gần đây theo sự tiến bộ của khoa hoc kỹ thuật, công cuộc công nghiệp hóa hiện đại hóa đất nước đang diễn ra khá toàn diện. Trước tình hình đó nhiều thách thức cũng được đặt ra.
Với sự phát triển về khoa học kỹ thuật ngày càng cao , một đất nước muốn phát triển phải đáp ứng được nền khoa học tiên tiến trong lĩnh vực sản xuất công nghiệp hiện nay. Việc áp dụng những công nghệ mới, tinh tiến vào đời sống vô cùng quan trọng. Với đề tài điều khiển mobile robot bằng cảm biến gia tốc, chúng em muốn nghiên cứu và ứng dụng điều khiển chuyển động để điều khiển rôbốt thay cho cách điều khiển thông thường bằng nút bấm, hướng đến mục tiêu là điều khiển các máy móc khác một cách dể dàng hơn, than thiện với người sử dụng. Ngoài ra còn ứng dụng cảm biến gia tốc vào các lĩnh vực cụ thể như ô tô, điện thoại thông minh, nhà thông minh, điều khiển 3D, .,.
Mặc dù chúng em đã rất cố gắng hoàn thành bài báo cáo này đúng thời hạn,nên thiếu sót là điều không thể tránh khỏi, mong quí thầy cô thông cảm.Chúng em mong nhận được những ý kiến đóng góp của quí thầy cô để bài báo cáo của chúng em ngày càng hoàn thiện hơn.
Cuối cùng chúng em xin chân thành cám ơn quý thầy cô !
MỤC LỤC
CHƯƠNG I:
TÌM HIỂU CHUNG.. 1
I. MOBILE ROBOT: 2
a. Giới thiệu chung về Mobile Robot: 2
b. Cấu trúc chung của Mobile Robot: 3
II. RC SERVO.. 6
1. Cấu tạo: 6
2. Nguyên lý hoạt động: 6
3. Servo và điều biến độ rộng xung: 7
III. CẢM BIẾN GIA TỐC MMA7361QT: 9
1. Tổng quan: 9
2. Tính năng: 10
3. Ứng dụng: 10
4. Kết nối: 11
5. Phương pháp đo cảm biến: 12
IV. VI ĐIỀU KHIỂN PIC16F887: 13
V. GIAO THỨC TRUYỀN DỮ LIỆU NỐI TIẾP BẤT ĐỒNG BỘ (UART): 15
VI. MODULE RF HM-TR TTL 433: 20
1. Giới thiệu chung: 20
2. Tổng quan về module HM-TR 433: 21
3. Cách kết nối: 22
CHƯƠNG II:
THIẾT KẾ HỆ THỐNG.. 24
I. MÔ HÌNH: 25
1. Thiết kế: 25
2. Chế tạo. 25
II. ĐIỆN TỬ. 28
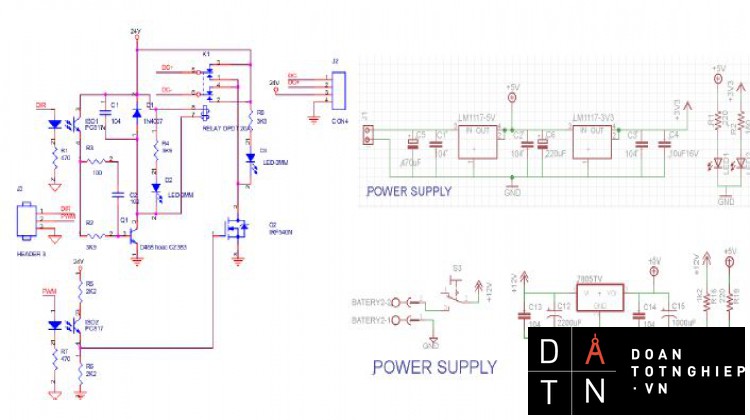
1. Mạch nguồn: 28
2. Board cảm biến MMA7361:Sơ đồ nguyên lý mạch cảm biến: 29
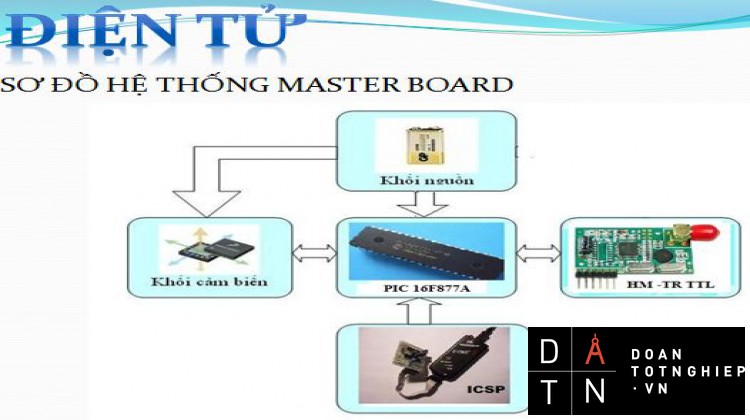
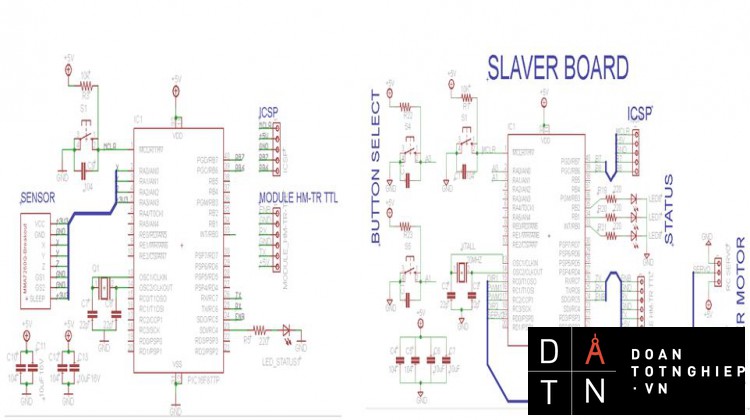
3. Master board: 29
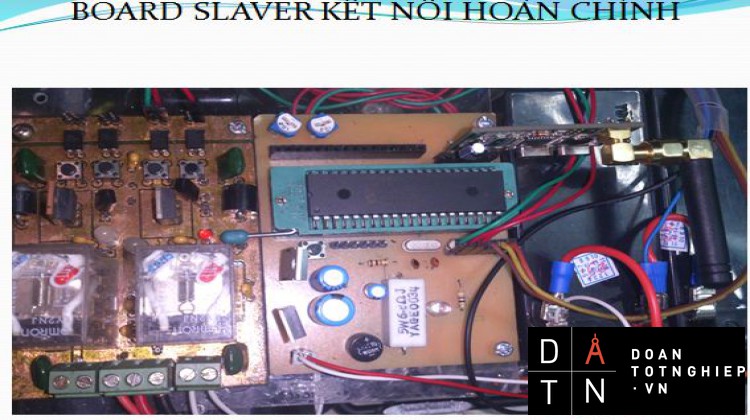
4. Slaver Board: 30
5. Mạch điều khiển động cơ DC: 31
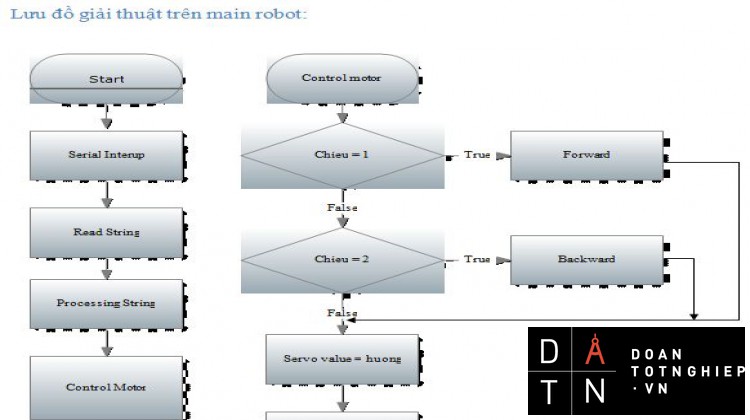
II. SƠ ĐỒ GIẢI THUẬT. 32
CHƯƠNG III:
KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN.. 34
I. KẾT QUẢ.. 35
II. HƯỚNG PHÁT TRIỂN: 35
TÀI LIỆU THAM KHẢO.. 36
CHƯƠNG I:
TÌM HIỂU CHUNG
I.MOBILE ROBOT:
Robot tự hành (Mobile Robot) là một thành phần có vai trò quan trọng trong nghành robot học. Cùng với sự phát triển mạnh mẻ của các hệ thống cơ – điện tử, robot tự hành ngày một hoàn thiện và ngày càng cho thấy lợi ích của nó trong công nghiệp và sinh hoạt.
Sự phát triển của khoa học kỹ thuật ngày càng nhanh góp phần nâng cao nâng suất lao động. Đặc biệt là sự ra đời và phát triển của công nghệ chế tạo Robotnhằm tạo ra sự tự động hóa trong quá trình sản xuất giảm đi sức lao động bằngchân tay của người lao động.
Mobile Robot được ứng dụng rất nhiềutrong cuộc sống.Tiềm năng ứng dụng của robot tự hành hết sức rộng lớn. Có thể kể đến robot vận chuyển vật liệu, hàng hóa trong các tòa nhà, nhà máy, cửa hàng, sân bay và thư viện; robot phục vụ quét dọn đường phố, khoang chân không; robot kiểm tra trong môi trường nguy hiểm; robot canh gác, do thám; robot khám phá không gian, di chuyển trên hành tinh; robot hàn, sơn trong nhà máy; robot xe lăn phục vụ người khuyết tật; robot phục vụ sinh hoạt gia đình v.v...
Mặc dù nhu cầu ứng dụng cao, nhưng những hạn chế chưa giải quyết được của robot tự hành, như chi phí chế tạo cao, đã không cho phép chúng được sử dụng rộng rãi. Một nhược điểm khác của robot tự hành phải kể đến là còn thiếu tính linh hoạt và thích ứng khi làm việc ở những vị trí khác nhau.
a.Giới thiệu chung về Mobile Robot:
- Khái Niệm:
Robot tự hành hay robot di động (Mobile Robot) được định nghĩa là một loại xe robot có khả năng tự dịch chuyển, tự vận động (có thể lập trình lại được) dưới sự điều khiển tự động để thực hiện thành công công việc được giao. Theo lý thuyết, môi trường hoạt động của robot tự hành có thể là đất, nước, không khí, không gian vũ trụ hay sự tổ hợp giữa chúng. Địa hình bề mặt mà robot di chuyển trên đó có thể bằng phẳng hoặc thay đổi lồi lõm.
Một số hình ảnh Mobile Robot được ứng dụng trong cuộc sống:
a) Robot Nomad 150. b) Sự kết hợp giữa robot tự hành Nomadic XR4000 và cánh tay robot PUMA 560. c) Robot “con rùa”. d) Robot Houdini di chuyển bằng bánh xích e) Robot bán tự động nghiên cứu ở vùng cực bắc
Một số hình ảnh Mobile Robot được ứng dụng trong cuộc sống:
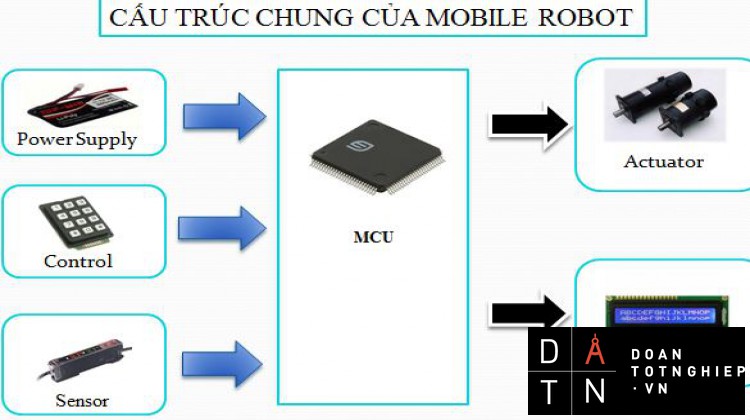
b.Cấu trúc chung của Mobile Robot:
- Cảm biến:
Cảm biến thường được định nghĩa theo nghĩa rộng là thiết bị cảm nhận và đáp ứng lại với những kích thích và các tín hiệu. Đây là thiết bị vô cùng quan trọng để robot có thể nhận biết được chính mình và thế giới bên ngoài .Chúng ta phải cần nghiên cứu rõ hơn về vấn đề này, để giúp cho robot trở lên càng ngày thông minh hơn. Cảm biến cũng là một bộ phận được ví như mắt của robot, có nhiều loại cảm biến như là cảm biến quang, cảm biến hồng ngoại, cảm biến siêu âm, cảm biến hình ảnh,cảm biến gia tốc góc…
- Cơ cấu vận hành:
Là một bộ phận dùng để thực hiện mọi cử động của robot như là động cơ, tay máy…
- Bộ xử lý:
Bộ não điều khiển mọi hoạt động tương tác của robot, bộ vi xử lí có thể dùng nhiều loại chip vi xử lí khác nhau, điển hình hiện nay thường là các loại chip họ 89MC, PIC, AVR,…
II.RC SERVO
1.Cấu tạo:
1, Động cơ
2, Bảng điện tử
3, Dây điện nguồn (Đỏ)
4, Dây tín hiệu (màu vàng hoặc trắng)
5, Dây mát 0v (Đen)
6, Biến trở tinh chỉnh
7, Bánh răng
8, Servo Attachment Horn/Wheel/Arm 9,Vỏ servo.10, IC tích hợp
Hình: Một động cơ servo
R/C kích thước chuẩn
Hình: Bên trong của một động cơ servo R/C. Servo bao gồm một động cơ,một chuỗi các bánh răng giảm tốc, một mạch điều khiển và một vôn kế.
2.Nguyên lý hoạt động:
Động cơ và vôn kế nối với mạch điều khiển tạo thành mạch hồi tiếp vòng kín.Cả mạch điều khiển và động cơ đều được cấp nguồn DC (thường từ 4.8 – 7.2 V).
Để quay động cơ, tín hiệu số được gới tới mạch điều khiển. Tín hiệu này khởi động động cơ, thông qua chuỗi bánh răng, nối với vôn kế. Vị trí của trục vôn kế cho biết vị trí trục ra của servo.Khi vôn kế đạt được vị trí mong muốn, mạch điều khiển sẽ tắt động cơ.
Động cơ servo được thiết kế để quay có giới hạn chứ không phải quay liên tục như động cơ DC hay động cơ bước. Mặc dù ta có thể chỉnh động cơ servo R/C quay liên tục, nhưng công dụng chính của động cơ servo là đạt được góc quay chính xác trong khoảng từ 900 – 1800. Việc điều khiển này có thể ứng dụng để lái robot, di chuyển các tay máy lên xuống, quay một cảm biến để quét khắp phòng…
3.Servo và điều biến độ rộng xung:
Trục của động cơ servo R/C được định vị nhờ vào kỹ thuật gọi là điều biến độ rộng xung (PWM).Trong hệ thống này, servo là đáp ứng của một dãy các xung số ổn định. Cụ thể hơn, mạch điều khiển là đáp ứng của một tín hiệu số có các xung biến đổi từ 1 – 2 ms. Các xung này được gởi đi với tần số 50Hz. Chú ý rằng không phải số xung trong một giây điều khiển servo mà là chiều dài của các xung. Servo đòi hỏi khoảng 30 – 60 xung/giây.Nếu số này quá thấp, độ chính xác và công suất để duy trì servo sẽ giảm.
Với độ dài xung 1 ms, servo được điều khiển quay theo một chiều (giả sử là chiều kim đồng hồ).
Điều khiển vị trí của trục ra của động cơ bằng cách điều chế độ rộng xung.
Với độ dài xung xung 2 ms, servo quay theo chiều ngược lại. Kỹ thuật này còn được gọi làtỉ lệ số - chuyển động của servo tỉ lệ với tín hiệu số điều khiển.
Công suất cung cấp cho động cơ bên trong servo cũng tỉ lệ với độ lệch giữa vị trí hiện tạicủa trục ra với vị trí nó cần đến.Nếu servo ở gần vị trí đích, động cơ được truyền động vớitốc độ thấp.Điều này đảm bảo rằng động cơ không vượt quá điểm định đến.Nhưng nếuservo ở xa vị trí đích nó sẽ được truyền động với vận tốc tối đa để đến đích càng nhanhcàng tốt.Khi trục ra đến vị trí mong muốn, động cơ giảm tốc.Quá trình tưởng chừng nhưphức tạp này diễn ra trong khoảng thời gian rất ngắn - một servo trung bình có thể quay600 trong vòng ¼ - ½ giây.
Vì độ dài xung có thể thay đổi tùy theo hãng chế tạo nên ta phải chọn servo và máy thu vô tuyến thuộc cùng một hãng để đảm bảo sự tương thích. Đối với robot, ta phải làm một vài thí nghiệm để xác định độ dài xung tối ưu.
III.CẢM BIẾN GIA TỐC MMA7361QT:
1.Tổng quan:
MMA7361QT là một cảm biến vi cơ bềmặt (surface micromachined integrated circuit accelerometer) thuộc loại điện dung.
Dưới tác dụng của gia tốc, khoảng cách giữa các vách ngăn thay đổi, sự thay đổi này dẫn đến sự thay đổi giá trị điện dung theo công thức quen thuộc:
Giá trị điện áp ngõ ra tỉ lệ với gia tốc đo được. Từ giá trị gia tốc, ta có thể tích phân đơn để có giá trị vận tốc hay tích phân 2 lớp để xác định vị trí của vật thể.
Gia tốc tĩnh do lực hấp dẫn có thể được dùng để xác định góc và độ nghiêng.
Cảm biến gia tốc MMA7361QT và Break board.
.
Cấu tạo cảm biến MMA7361QT
2.Tính năng:
• Lựa chọn độ nhạy (1.5g/6g).
• Dòng tiêu thụ thấp: 400 μA.
• Chế độ ngủ: 3 μ A.
• Điện áp hoạt động thấp: 2,2 V - 3.3 V.
• Kích thước : 3mm x 6mm x 1mm.
• Độ nhạy sáng cao (800 mV / g@1.5g).
• Thời gian mở nhanh.
• Tích hợp bộ lọc thông thấp.
• Thiết kế chắc chắn, chịu rung động.
• Không có chì.
• Chi phí thấp.
3.Ứng dụng:
- Điều khiển trong môi trường 3D.
- Chế tạo máy đo góc tĩnh.
- Chống trộm nhờ tính năng đo được độ rung động.
- Cảm biến chuyển động cho rô bốt.
- Sử dụng trong lĩnh vực Game giải trí, các bộ điều khiển chuyển động.
- Ứng dụng cao trong các lĩnh vực như ô tô, điện thoại thông minh, laptop pc,…
4.
Kết nối
Sơ đồ chân của cảm biến MMA7361QT
Chân 10: lựa chon độ nhạy.
Chân 5,6: Nguồn cấp cho cảm biến.
Chân 2 : giá trị ra của trục X
Chân 3 : giá trị ra của trục Y
Chân 4 : giá trị ra của trục Z
Chân 7 : Chế độ ngủ của cảm biến.
Chân 9 : ngo ra chế độ rơi tự do
Chân 13 : chân bật chế độ thử
Cấp nguồn 3V3 cho cảm biến qua 2 chân VDD và VSS, nếu vi điều khiển dùng điện áp 5V thì phải nối chung mass với cảm biến để đảm tín hiệu vào, các chân Sleep mode, g-select 1,2 nối vào các chân I/O của vi điều khiển để điều khiển hoạt động của cảm biến.
Các chân X , Y, Z kết nối vào các chân A/Din để đọc giá trị tương tự từ đó có thể biết được độ nghiêng,…
5.Phương pháp đo cảm biến:
Bằng cách sử dụng bộ chuyển ADC (Analog Digital Converter) trong PIC16F887.
Kết nối cảm biến với vi điều khiển
IV.VI ĐIỀU KHIỂN PIC16F887:
Cấu trúc vi điều khiển PIC16F887
PIC 16F887 là dòng PIC phổ biến nhất hiện nay ( đủ mạnh về tính năng, 40 chân, bộ nhớ đủ cho hầu hết các ứng dụng thông thường ). Cấu trúc tổng quát của PIC 16F887 như sau:
- 8 K Flash ROM.
- 368 Bytes RAM.
- 256 Bytes EEPROM.
- 5 ports (A, B, C, D, E) vào ra với tín hiệu điều khiển độc lập.
- 2 bộ định thời 8 bits (Timer 0 và Timer 2).
- Một bộ định thời 16 bits (Timer 1) có thể hoạt động trong chế độ tiết kiệm năng lượng (SLEEP MODE) với nguồn xung Clock ngoài.
- 2 bô CCP( Capture / Compare/ PWM).
- 1 bộ biến đổi AD 10 bits, 8 ngõ vào.
- 2 bộ so sánh tương tự (Compartor).
- 1 bộ định thời giám sát (WatchDog Timer).
- Một cổng song song 8 bits với các tín hiệu điều khiển.
- Một cổng nối tiếp.
- 15 nguồn ngắt.
- Có chế độ tiết kiệm năng lượng.
- Nạp chương trình bằng cổng nối tiếp ICSP(In-Circuit Serial Programming)
- Được chế tạo bằng công nghệ CMOS
- 35 tập lệnh có độ dài 14 bits.
- Tần số hoạt động tối đa 20MHz.
Sơ đồ chân PIC16F887
V. GIAO THỨC TRUYỀN DỮ LIỆU NỐI TIẾP BẤT ĐỒNG BỘ (UART):
Thuật ngữ USART trong tiếng anh là viết tắt của cụm từ: Universal Synchronous & Asynchronous serial Reveiver and Transmitter, nghĩa là bộ truyền nhận nối tiếp đồng bộ và không đồng bộ. Cần chú ý rằng khái niệm USART (hay UART nếu chỉ nói đến bộ truyền nhận không đồng bộ) thường để chỉ thiết bị phần cứng (device, hardware), không phải chỉ một chuẩn giao tiếp. USART hay UART cần phải kết hợp với một thiết bị chuyển đổi mức điện áp để tạo ra một chuẩn giao tiếp nào đó. Ví dụ, chuẩn RS232 (hay COM) trên các máy tính cá nhân là sự kết hợp của chip UART và chip chuyển đổi mức điện áp. Tín hiệu từ chip UART thường theo mức TTL: mức logic high là 5, mức low là 0V. Trong khi đó, tín hiệu theo chuẩn RS232 trên máy tính cá nhân thường là -12V cho mức logic high và +12 cho mức low (tham khảo hình 1). Chú ý là các giải thích trong tài liệu này theo mức logic TTL của USART, không theo RS232.
Tín hiệu tương đương của UART và RS232.
Truyền thông nối tiếp: giả sử bạn đang xây dựng một ứng dụng phức tạp cần sử dụng nhiều vi điều khiển (hoặc vi điều khiển và máy tính) kết nối với nhau. Trong quá trình làm việc các vi điều khiển cần trao đổi dữ liệu cho nhau, ví dụ tình huống Master truyền lệnh cho Slaver hoặc Slaver gởi tín hiệu thu thập được về Master xử lí…Giả sử dữ liệu cần trao đổi là các mã có chiều dài 8 bits, bạn có thể sẽ nghĩ đến cách kết nối đơn giản nhất là kết nối 1 PORT (8 bit) của mỗi vi điều khiển với nhau, mỗi line trên PORT sẽ chịu trách nhiệm truyền/nhận 1 bit dữ liệu. Đây gọi là cách giao tiếp song song, cách này là cách đơn giản nhất vì dữ liệu được xuất và nhận trực tiếp không thông qua bất kỳ một giải thuật biến đổi nào và vì thế tốc độ truyền cũng rất nhanh.Tuy nhiên, như bạn thấy, nhược điểm của cách truyền này là số đường truyền quá nhiều, bạn hãy tưởng tượng nếu dữ liệu của bạn có giá trị càng lớn thì số đường truyền cũng sẽ nhiều thêm.Hệ thống truyền thông song song thường rất cồng kềnh và vì thế kém hiệu quả. Truyền thông nối tiếp sẽ giải quyết vần đề này, trong tuyền thông nối tiếp dữ liệu được truyền từng bit trên 1 (hoặc một ít) đường truyền. Vì lý do này, cho dù dữ liệu của bạn có lớn đến đâu bạn cũng chỉ dùng rất ít đường truyền. Hình 2 mô tả sự so sánh giữa 2 cách truyền song song và nối tiếp trong việc truyền con số 187 thập phân (tức 10111011 nhị phân).
Truyền 8 bit theo phương pháp song song và nối tiếp.
Một hạn chế rất dễ nhận thấy khi truyền nối tiếp so với song song là tốc độ truyền và độ chính xác của dữ liệu khi truyền và nhận. Vì dữ liệu cần được “chia nhỏ” thành từng bit khi truyền/nhận, tốc độ truyền sẽ bị giảm. Mặt khác, để đảm bảo tính chính xác của dữ liệu, bộ truyền và bộ nhận cần có những “thỏa hiệp” hay những tiêu chuẩn nhất định. Phần tiếp theo trong chương này giới thiệu các tiêu chuẩn trong truyền thông nối tiếp không đồng bộ.
Khái niệm “đồng bộ” để chỉ sự “báo trước” trong quá trình truyền.Lấy ví dụ thiết bị 1 (tb1) kết với với thiết bị 2 (tb2) bởi 2 đường, một đường dữ liệu và 1 đường xung nhịp. Cứ mỗi lần tb1 muốn send 1 bit dữ liệu, tb1 điều khiển đường xung nhịp chuyển từ mức thấp lên mức cao báo cho tb2 sẵn sàng nhận một bit. Bằng cách “báo trước” này tất cả các bit dữ liệu có thể truyền/nhận dễ dàng với ít “rủi ro” trong quá trình truyền.Tuy nhiên, cách truyền này đòi hỏi ít nhất 2 đường truyền cho 1 quá trình (send or receive). Giao tiếp giữa máy tính và các bàn phím (trừ bàn phím kết nối theo chuẩn USB) là một ví dụ của cách truyền thông nối tiếp đồng bộ.
Khác với cách truyền đồng bộ, truyền thông “không đồng bộ” chỉ cần một đường truyền cho một quá trình.“Khung dữ liệu” đã được chuẩn hóa bởi các thiết bị nên không cần đường xung nhịp báo trước dữ liệu đến. Ví dụ 2 thiết bị đang giao tiếp với nhau theo phương pháp này, chúng đã được thỏa thuận với nhau rằng cứ 1ms thì sẽ có 1 bit dữ liệu truyền đến, như thế thiết bị nhận chỉ cần kiểm tra và đọc đường truyền mỗi mili-giây để đọc các bit dữ liệu và sau đó kết hợp chúng lại thành dữ liệu có ý nghĩa. Truyền thông nối tiếp không đồng bộ vì thế hiệu quả hơn truyền thông đồng bộ (không cần nhiều lines truyền).Tuy nhiên, để quá trình truyền thành công thì việc tuân thủ các tiêu chuẩn truyền là hết sức quan trọng.Chúng ta sẽ bắt đầu tìm hiểu các khái niệm quan trọng trong phương pháp truyền thông này.
Baud rate (tốc độ Baud): như trong ví dụ trên về việc truyền 1 bit trong 1ms, bạn thấy rằng để việc truyền và nhận không đồng bộ xảy ra thành công thì các thiết bị tham gia phải “thống nhất” nhau về khoảng thời dành cho 1 bit truyền, hay nói cách khác tốc độ truyền phải được cài đặt như nhau trước, tốc độ này gọi là tốc độ Baud. Theo định nghĩa, tốc độ baud là số bit truyền trong 1 giây. Ví dụ nếu tốc độ baud được đặt là 19200 thì thời gian dành cho 1 bit truyền là 1/19200 ~ 52.083us.
Frame (khung truyền): do truyền thông nối tiếp mà nhất là nối tiếp không đồng bộ rất dễ mất hoặc sai lệch dữ liệu, quá trình truyền thông theo kiểu này phải tuân theo một số quy cách nhất định. Bên cạnh tốc độ baud, khung truyền là một yếu tốc quan trọng tạo nên sự thành công khi truyền và nhận. Khung truyền bao gồm các quy định về số bit trong mỗi lần truyền, các bit “báo” như bit Start và bit Stop, các bit kiểm tra như Parity, ngoài ra số lượng các bit trong một data cũng được quy định bởi khung truyền. Hình 1 là một ví dụ của một khung truyền theo UART, khung truyền này được bắt đầu bằng một start bit, tiếp theo là 8 bit data, sau đó là 1 bit parity dùng kiểm tra dữ liệu và cuối cùng là 2 bits stop.
Start bit: start là bit đầu tiên được truyền trong một frame truyền, bit này có chức năng báo cho thiết bị nhận biết rằng có một gói dữ liệu sắp được truyền tới. Ở module USART trong AVR, đường truyền luôn ở trạng thái cao khi nghỉ (Idle), nếu một chip AVR muốn thực hiện việc truyền dữ liệu nó sẽ gởi một bit start bằng cách “kéo” đường truyền xuống mức 0. Như vậy, với AVR bit start là mang giá trị 0 và có giá trị điện áp 0V (với chuẩn RS232 giá trị điện áp của bit start là ngược lại). start là bit bắt buộc phải có trong khung truyền.
Data: data hay dữ liệu cần truyền là thông tin chính mà chúng ta cần gởi và nhận. Data không nhất thiết phải là gói 8 bit, với AVR bạn có thể quy định số lượng bit của data là 5, 6, 7, 8 hoặc 9 (tương tự cho hầu hết các thiết bị hỗ trợ UART khác). Trong truyền thông nối tiếp UART, bit có ảnh hưởng nhỏ nhất (LSB – Least Significant Bit, bit bên phải) của data sẽ được truyền trước và cuối cùng là bit có ảnh hưởng lớn nhất (MSB – Most Significant Bit, bit bên trái).
Parity bit: parity là bit dùng kiểm tra dữ liệu truyền đúng không (một cách tương đối). Có 2 loại parity là parity chẵn (even parity) và parity lẻ (odd parity). Parity chẵn nghĩa là số lượng số 1 trong dữ liệu bao gồm bit parity luôn là số chẵn. Ngược lại tổng số lượng các số 1 trong parity lẻ luôn là số lẻ. Ví dụ, nếu dữ liệu của bạn là 10111011 nhị phân, có tất cả 6 số 1 trong dữ liệu này, nếu parity chẵn được dùng, bit parity sẽ mang giá trị 0 để đảm bảo tổng các số 1 là số chẵn (6 số 1). Nếu parity lẻ được yêu cầu thì giá trị của parity bit là 1. Hình 1 mô tả ví dụ này với parity chẵn được sử dụng. Parity bit không phải là bit bắt buộc và vì thế chúng ta có thể loại bit này khỏi khung truyền (các ví dụ trong bài này tôi không dùng bit parity).
Stop bits: stop bits là một hoặc các bit báo cho thiết bị nhận rằng một gói dữ liệu đã được gởi xong. Sau khi nhận được stop bits, thiết bị nhận sẽ tiến hành kiểm tra khung truyền để đảm bảo tính chính xác của dữ liệu. Stop bits là các bits bắt buộc xuất hiện trong khung truyền, trong AVR USART có thể là 1 hoặc 2 bits (Trong các thiết bị khác Stop bits có thể là 2.5 bits).
Trong ví dụ ở hình 1, có 2 stop bits được dùng cho khung truyền. Giá trị của stop bit luôn là giá trị nghỉ (Idle) và là ngược với giá trị của start bit, giá trị stop bit trong AVR luôn là mức cao (5V).
(Chú ý và gợi ý: khung truyền phổ biến nhất là : start bit+ 8 bit data+1 stop bit)
VI.MODULE RF HM-TR TTL 433:
1.Giới thiệu chung.
HM-TR là loạt module truyền nhận dữ liệu không dây được phát triển bởi Hope microelectronics, dành riêng cho các ứng dụng cần truyền dữ liệu không dây.Nó có tính năng truyền dữ liệu tốc độ cao, khoảng cách truyền dẫn dài hơn.Các giao thức truyền thông được tự kiểm soát và giao diện dễ sử dụng.Module có thể được kết nối vào thiết kế hiện tại của bạn để có thể thiết lập truyền thông không dây dễ dàng.
-
Tính năng chính:
- Công nghệ FSK, chế độ bán song công, chống nhiễu tốt.
- Băng tần ISB, không cần cấp giấy phép sử dụng tần số.
- Tần số hoạt động có thể được cấu hình và có thể được sử dụng trong các ứng dụng FDMA.
- Có thể được lựa chọn độ lệch tần số truyền và băng thông bộ tiếp nhận.
- Giao thức dịch tự kiểm soát, dễ dàng sử dụng.
- Tốc độ dữ liệu có thể là chọn từ một phạm vi rộng.
- Cung cấp chân ENABLE pin để kiểm soát, đáp ứng yêu cầu ứng dụng khác nhau.
- Độ nhạy cao, truyền trong phạm vi rộng.
- Giao tiếp chuẩn UART, TTL logic có thể lựa chọn.
- Đáng tin cậy, kích thước nhỏ, lắp dễ dàng hơn.
-
Ứng dụng:
- Điều khiển từ xa
- Hệ thống đo lường từ xa
- Kiểm soát truy cập
- Thu thập dữ liệu
- Nhà thông minh
- Theo dõi em bé
2.Tổng quan về module HM-TR 433:
Sơ đồ chân của module HM – TR
- Tần số hoạt động: 433MHz
- UART baund : 9600 bps
- Data bits : 8 bit
- Stop Bit : 1 bit
- Kích thước module : 24x43mm
3.Cách kết nối:
Sơ đồ nối chân module vào vi điều khiển.
Các chân của module được nối trực tiếp vào vi điều khiển, chân DTX-RX, DRX-TX, chân ENABLE được kết nối với 1 chân I/O của vi điều khiển – khi chân ENABLE có mức logic cao (1) module sẽ hoạt động, nếu mức logic thấp (0) module sẽ ở chế độ ngủ tiết.
...........................................................
..........................................................
I.KẾT QUẢ
- Chế tạo hoàn tất mô hình và bộ điều khiển sử dụng cảm biến gia tốc.
- Mô hình nhỏ gọn, có thể phát triển thêm.
- Mô hình chạy ổn định.
Tuy nhiên, vẫn còn một số hạn chế:
- Vì sử dụng ắc qui nên khối lượng rô bốt nặng, thời gian hoạt động thấp.
- Cơ cấu cơ khí còn phụ thuộc vào sản phẩm đã được sản xuất..
Cách khắc phục hạn chế:
- Sử dụng pin lithium sẽ giảm bớt tải trọng, tang thời lượng hoạt động cho robot.
- Thiết kế bộ giảm sốc mới có hiệu quả hơn.
II.HƯỚNG PHÁT TRIỂN:
Từ mô hình này, có thể phát triển đề tài theo hướng sau : Tích hợp camera để giám sát, sử dụng một cảm biến gia tốc trên robot truyền dữ liệu về máy tính để nhận biết môi trường xung quanh, gắn la bàn điện tử để nhận biết hướng di chuyển, tất cả tạo nên một hê thống điều khiển thực tế ảo.
TÀI LIỆU THAM KHẢO
[1] Datasheet PIC16F887A www.microchip.com
[2] Datasheet MMA7361QT www.freescale.com
[3] Datasheet Module HM – TR TTL 433 http://www.hoperf.com
[4] http://Tme.com.vn
[5] MMA7361Q-Breakout http://www.sparkfun.com/
[6] Tom Igoe's online tutorial using the MMA7361QT.
[7] Portuguese tutorial by Daniel Gonçalves.
[8] www.Google.com











