đồ án HỆ THỐNG CHIẾT RÓT XOÁY NẮP VÀ ĐÓNG THÙNG SẢN PHẨM TỰ ĐỘNG



NỘI DUNG ĐỒ ÁN
TÓM TẮT đồ án HỆ THỐNG CHIẾT RÓT XOÁY NẮP VÀ ĐÓNG THÙNG SẢN PHẨM TỰ ĐỘNG
Hệ thống chiết rót chai tự động được sử dụng để phục vụ cho các ngành: thực phẩm, nước uống, dược phẩm, mỹ phẩm, hóa chất, dầu nhớt,… Sự ra đời của máy chiết rót tự động đã giúp tiết kiệm một khoản chi phí nhân công tương đối lớn, nâng cao năng suất chiết đóng thành phẩm vào chai.
Trong toàn bộ đề tài, nhóm em đã thực hiện các quá trình lên ý tưởng, thiết kế và chế tạo mô hình hệ thống chiết rót đóng nắp chai và đóng thùng tự động cho chai nước Nutrifood, hoạt động với năng suất ổn định. Để hoàn thành đề tài, nhóm em đã sử dụng PLC S7 1200 điều khiển hệ thống gồm các cơ cấu chính: bơm nước, cấp nắp, vặn nắp, đẩy chai, gắp chai, hạ thùng.
Mô hình được chế tạo có một số ưu điểm nổi bật như sau: khả năng chiết rót chính xác, năng suất cao, dễ bảo trì và sửa chữa.
ABSTRACT
The automatic bottle-filling system is used to serve industries: food, drinking water, pharmaceuticals, cosmetics, chemicals, lubricants, etc.
The introduction of automatic filling machines has saved a relatively large amount of labor costs, improving the productivity of filling finished products into bottles.
In the whole project, my team has conceptualized, designed, and manufactured a model of an automatic bottle filling and capping system for Nutrifood water bottles, operating with stable productivity. To complete the project, my group used PLC S7 1200 to control the system, including the main mechanisms: water pump, cap feeding, cap screwing, bottle push, bottle picker, and barrel lowering.
The manufactured model has several outstanding advantages: accurate filling, high productivity, and maintenance and repair easily.
MỤC LỤC
LỜI CAM ĐOAN.. i
LỜI CẢM ƠN.. ii
TÓM TẮT.. iii
ABSTRACT.. iv
Chương 1. Giới thiệu đề tài1
1.1 Giới thiệu chung. 1
1.1.1 Tính cấp thiết của đề tài2
1.1.2 Chức năng chính của hệ thống và phạm vi ứng dụng thực tiễn. 3
1.1.3 Kết quả dự tính đạt được. 4
1.1.4 Kết cấu của đề tài4
Chương 2. Các giải pháp công nghệ. 6
2.1 Tổng quan hệ thống. 6
2.1.1 Chiết rót nước vào chai6
2.1.2 Đóng nắp chai7
2.1.3 Cảm biến trong các dây chuyền chiết rót8
2.1.4 Dây chuyền đóng thùng. 9
2.2 Bộ điều khiển lập trình PLC. 11
2.2.1 Giới thiệu chung về PLC. 11
2.2.2 Cấu trúc của PLC. 12
2.2.3 Hoạt động của một PLC. 13
2.2.4 Lựa chọn bộ điều khiển lập trình PLC. 15
2.2.5 Giới thiệu PLC Siemens S7-1200 CPU 1212C DC/DC/DC. 15
2.3 Giới thiệu phần mềm lập trình TIA Portal V16. 22
2.3.1 Giới thiệu SIMATIC STEP 7 Basic. 22
2.3.2 Các bước tạo một project22
2.3.3 . Sử dụng bảng Tag trong PLC. 25
2.3.4 Tải chương trình xuống CPU.. 26
2.4 Giới thiệu về WinCC. 28
2.4.1 Tổng quan về WinCC. 28
2.4.2 Các đặc điểm chính của Wincc. 29
2.4.3 Cấu hình giao diện Wincc. 30
Chương 3. Quy trình thiết kế phần cơ khí32
3.1 Kết cấu của hệ thống. 32
3.2 Mâm xoay. 33
3.3 Cơ cấu bơm nước. 36
3.3.1 Tính chọn động cơ bơm nước. 37
3.3.2 Thiết kế toàn bộ cơ cấu bơm nước. 37
3.4 Cơ cấu cấp nắp tự động. 38
3.5 Cơ cấu vặn nắp chai40
3.6 Cơ cấu đẩy và gắp chai44
3.7 Băng tải48
3.8 Tổng thể hệ thống chiết rót và đóng nắp chai52
Chương 4. TÍNH TOÁN VÀ THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN.. 56
4.1 Sơ đồ hoạt động của hệ thống. 56
4.2 Tính toán và lựa chọn thiết bị57
4.2.1 Chọn cảm biến:57
4.2.2 Tính chọn van điều khiển xi lanh. 61
4.2.3 Tính chọn rơ-le điều khiển động cơ:64
4.3 Lưu đồ thuật toán. 66
4.4 Sơ đồ đấu nối hệ thống. 69
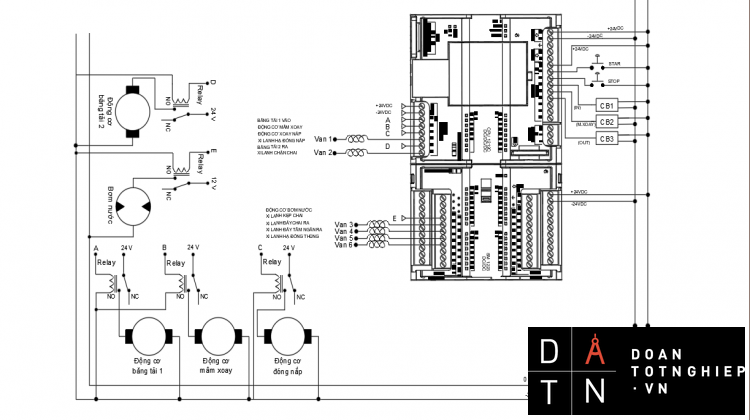
4.4.1 Sơ đồ đấu nối PLC. 69
4.4.2 Sơ đồ đấu nối hệ thống khí nén. 71
4.5 Lập trình điều khiển plc s7-1200. 71
4.5.1 Xác định đầu vào và đầu ra. 71
4.5.2 Cấu hình phần cứng PLC. 72
4.5.3 Lập trình PLC S7 – 1200. 72
4.6 Thiết kế giao diện điều khiển giám sát Scada. 73
4.6.1 Cấu hình thiết bị73
4.6.2 Thiết kế giao diện Scada. 74
4.7 Kết quả mô phỏng. 74
Chương 5. THI CÔNG MÔ HÌNH THỰC NGHIỆM – ĐÁNH GIÁ KẾT QUẢ THỰC NGHIỆM... 78
5.1 Thi công thử nghiệm mô hình. 78
5.1.1 Kết quả thực tế. 78
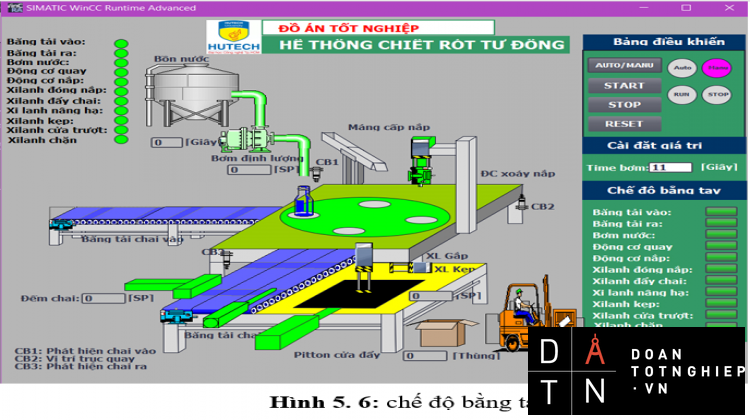
5.1.2 Hệ thống mô phỏng và điều khiển trên win cc. 80
5.2 Đánh giá kết quả. 85
Chương 6. Kết luận. 86
TÀI LIỆU THAM KHẢO.. 87
DANH MỤC HÌNH ẢNH
Hình 1. 1: Hệ thống chiết rót và đóng nắp chai tự động công ty Federal (Nguồn prweb.com)1
Hình 2. 1: Máy chiết bàn quay. 7
Hình 2. 2: Máy chiết rót và đóng nắp chai bàn xoay. 8
Hình 2. 3:Cảm biến phát quang. 9
Hình 2. 4: Bộ phận gắp chai10
Hình 2. 5: Một cánh tay robot đang làm việt10
Hình 2. 6: Drop packer11
Hình 2. 7: Cấu trúc cơ bản hệ thống PLC (Nguồn skytechgroup.vn)12
Hình 2. 8: Sơ đồ hoạt động của PLC (Nguồn dipslab.com)14
Hình 2. 10: Biểu tượng phần mềm TIA - Portal V16. 22
Hình 2. 11: Create new project22
Hình 2. 12: Đặt tên cho dự án. 23
Hình 2. 13: Configure a device. 23
Hình 2. 14: Add new device. 24
Hình 2. 15: Chọn loại CPU.. 24
Hình 2. 16: Một project mới được tạo ra. 25
Hình 2. 17:Giaodiện khai báo các biến TIAPORTAL. 25
Hình 2. 18:Giaodiện soạn thảo TIAPORTAL. 26
Hình 2. 19:ĐổchươngtrìnhvàoPLC.. 27
Hình 2. 20:Thiếtlậpliênkếtgiữamáytínhvà PLC.. 27
Hình 2. 21:KhởiđộngModule PLC.. 28
Hình 2. 22 Hình ví dụ cho WinCC.. 29
Hình 2. 23: Khai báo địa chỉ IP cho PLC.. 30
Hình 2. 24:Khai báo của cửa sổ WinCC Advanced. 31
Hình 2. 25: Connect và nối dây với máy tính. 31
Hình 3. 1: Sơ đồ hoạt động của hệ thống. 32
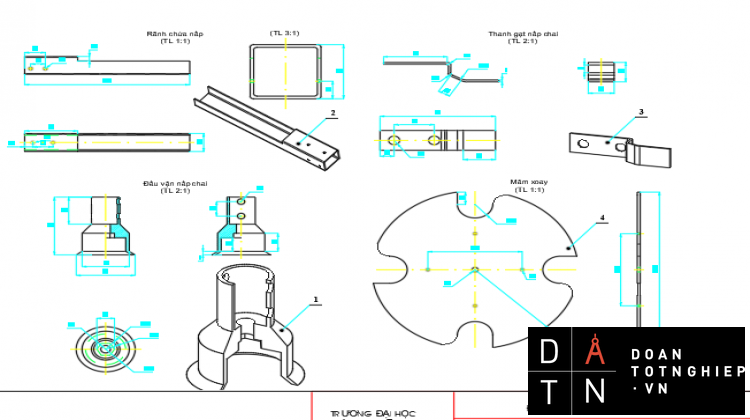
Hình 3. 2: Mặt trên mâm xoay. 34
Hình 3. 3: Kích thước mâm xoay. 34
Hình 3. 4: Cấu tạo mâm xoay. 35
Hình 3. 5: Động cơ D-ZYTD555-12V 80RPM.. 36
Hình 3. 6: Động cơ bơm nước DC 385 (Nguồn aliexpress.com)37
Hình 3. 7: Cơ cấu bơm nước. 38
Hình 3. 8: Kích thướcrãnh chứa nắp. 39
Hình 3. 9: Kích thước thanh gạt nắp. 39
Hình 3. 10: Cấu tạo cơ cấu vặn nắp chai41
Hình 3. 11: Cấu tạo đầu vặn nắp chai42
Hình 3. 12: Động cơ giảm tốc HN-GH12-1632 (Nguồn aliexpress.com)43
Hình 3. 13: Xi lanh đôi TN16X40 – S. 44
Hình 3. 14: Cấu tạo cơ cấu đẩy và gắp chai45
Hình 3. 15: Băng tải PVC (Nguồn zolayrubber.com)49
Hình 3. 16: Động cơ DSD-46SW3700246000-108K(Nguồn. alibaba.com)51
Hình 3. 17: Cấu tạo băng tải52
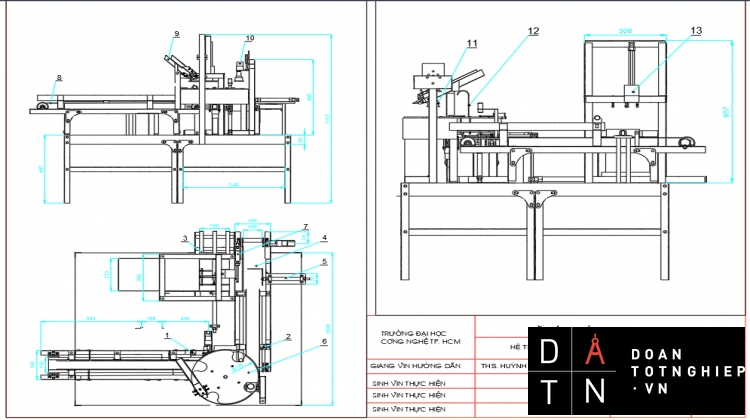
Hình 3. 18: Hệ thống cơ khí sau khi hoàn thiện thiết kế. 53
Hình 3. 19: Hệ thống cơ khí sau khi hoàn thiện thiết kế. 53
Hình 3. 20: Hệ thống cơ khí sau khi hoàn thiện thiết kế. 54
Hình 3. 21: Mô hình thực tế sau khi chế tạo. 55
Hình 4. 1: đồ hoạt động của hệ thống. 56
Hình 4. 2: Một số loại cảm biến quang trong thực tế (Nguồn library.automationdirect.com)58
Hình 4. 3: Cảm biến hồng ngoại E3F-DS30C4 (Nguồn aliexpress.com)59
Hình 4. 4: Cảm biến tiệm cận SN04-N.. 60
Hình 4. 5: Van điện từ khí nén AIRTAC 4V210-08 (Nguồn aliexpress.com)62
Hình 4. 6: Cấu tạo và ký hiệu của van điện từ khí nén 5/2 (Nguồn hafner-pneumatik.com)63
Hình 4. 7: Van điện từ khí nén 4V210 – 08 (Nguồn vatgia.com)63
Hình 4. 8: Cấu tạo hoạt động Rơ-le trung gian (tiếp điểm). (Nguồn bachkhoa.org)64
Hình 4. 9: Rơ-le MY2N - 24VDC 8 chân dẹt OMRON. (Nguồn aliexpress.com)65
Hình 4. 10: Rơ-le MY2N – 24VDC 8 chân dẹt OMRON (Nguồn khoidongtu.com)65
Hình 4. 12: Sơ đồ chân I/O của hệ thống. 69
Hình 4. 13: Sơ đồ mạch nguồn hệ thống. 69
Hình 4. 14: Sơ đồ đấu nối PLC.. 70
Hình 4. 15:Sơ đồ đấu nối van. 71
Hình 4. 16: Phần cứng SCADA.. 73
Hình 4. 17:Kết nối PLC với Scada. 73
Hình 4. 18:Giao diện Scada. 74
Hình 5. 1:Tổng quan mô hình. 78
Hình 5. 2:Tổng quan hệ thống điện. 78
Hình 5. 3:Tổng quan mô hình hoạt động. 79
Hình 5. 4:Khai báo tên cho các thiết bị81
Hình 5. 5:Giao diện khi hệ thống khi chưa hoạt động. 82
Hình 5. 6: chế độ bằng tay. 82
Hình 5. 7:hệ thống hoạt động bơm nước. 83
Hình 5. 8:Hệ thống đóng nắp chai83
Hình 5. 9:Hệ thống đẩy chai84
Hình 5. 10:Thực hiện hoàn tất sản phẩm.. 84
DANH MỤC BẢNG
Bảng 2. 1: Một số CPU S7 - 1200. 18
Bảng 2. 2: Phân vùng bộ nhớ. 18
Bảng 2. 3: Tập lệnh xử lý bít19
Bảng 2. 4: Tập lệnh Timer, Counter20
Bảng 2. 5: Tập lệnh toán học. 21
Bảng 2. 6: Tập lệnh di chuyển. 21
Bảng 3. 1: Thông số kỹ thuật động cơ. 36
Bảng 3. 2: Thông số kỹ thuật động cơ bơm nước DC 385. 37
Bảng 3. 3: Thông số kỹ thuật động cơ DC giảm tốc HN-GH12-1632. 43
Bảng 3. 4: Thông số kỹ thuật xi lanh 1 và 2. 44
Bảng 3. 6: Thông số kỹ thuật các xi lanh 2,3,4,5,6. 48
Bảng 3. 7: Thông số kỹ thuật động cơ DSD-46SW3700246000-108K.. 51
Bảng 4. 1:Thông số kỹ thuật cảm biến tiệm cận SN04-N.. 61
Bảng 4. 2: Thông số kỹ thuật van điện từ khí nén Airtac 4V210 - 08. 63
Bảng 4. 3: Thông số kỹ thuật rơ-le MY2N – 24VDC 8 chân dẹt OMRON.. 66
Bảng 4. 4: Đầu vào PLC.. 71
Bảng 4. 5:Đầu ra PLC.. 72
Chương 1. Giới thiệu đề tài
Chương này giới thiệu tổng quan về đề tài chiết rót đóng nắp chai và đóng thùng tự động.
1.1 Giới thiệu chung
Hệ thống chiết rót tự động là thành phần quan trọng trong dây chuyền súc rửa, chiết rót và đóng nắp phục vụ cho các ngành đóng gói chất lỏng công nghiệp.
Hình 1. 1: Hệ thống chiết rót và đóng nắp chai tự động công ty Federal
(Nguồn prweb.com)
Hệ thống chiết rót chai tự động được sử dụng nhiều để phục vụ cho các ngành: thực phẩm, nước uống, dược phẩm, mỹ phẩm, hóa chất, dầu nhớt,… Sự ra đời của máy chiết rót tự động đã tiết kiệm cho các nhà sản xuất một khoản chi phí nhân công tương đối lớn, nâng cao năng suất chiết đóng thành phẩm vào chai.
Hệ thống được kết hợp giữa các khâu chiết rót, đóng nắp, đóng thùng bán tự động. Bộ điều khiển trung tâm thường sử dụng PLC. Mỗi khâu đều vận hành tự động, nhân công chỉ tham gia vào một số công đoạn điều khiển, đầu vào và đầu ra (xếp chai vào, đóng thùng, vận hành máy,...).
1.1.1 Tính cấp thiết của đề tài
Trong xã hội hiện đại ngày nay, nhu cầu ăn uống của người dân ngày càng được nâng cao. Ngành công nghiệp thực phẩm đóng gói, nước uống đóng chai cũng ngày càng tăng lên về số lượng sản phẩm trên thị trường.
Khảo sát vào năm 2015 của Euromonitor cho thấy, thị trường đồ uống đóng chai đã đạt ngưỡng gần 170 tỉ USD, dự kiến sẽ tăng gần 10% tới thời điểm 2020. Trong phân khúc ngành hàng này, nước chiếm ưu thế với hơn 35% trong tổng thị phần thị trường, còn đồ uống có ga đạt khoảng 22%. Nước uống đóng chai sẽ tăng nhanh nhất do người tiêu dùng có xu hướng thích dùng nước uống cung cấp nguồn năng lượng.
Dự báo cũng chỉ ra rằng, thị trường Châu Á – Thái Bình Dương sẽ tiếp tục dẫn đầu thế giới về tăng trưởng trong đó có Việt Nam. Sức hấp dẫn tăng trưởng của ngành nước đóng chai cũng đã thúc đẩy thêm nhiều doanh nghiệp tham gia vào lĩnh vực này.
Hệ thống chiết rót tự động là chiết rót một lượng chất lỏng nhất định vào các chai, bình, lọ,... Các hệ thống, máy chiết rót tự động được sử dụng nhiều trong ngành công nghiệp thực phẩm. Ngành công nghiệp này yêu cầu năng suất cao, nghiêm ngặt về vệ sinh an toàn thực phẩm. Tùy theo tính chất của chất lỏng, các máy chiết rót sẽ có cấu tạo và cách hoạt động khác nhau.
Nắm bắt được nhu cầu cấp thiết này nhóm em đã lựa chọn phương án nghiên cứu và phát triển" HỆ THỐNG CHIẾT RÓT XOÁY NẮP VÀ ĐÓNG THÙNG SẢN PHẨM TỰ ĐỘNG".
1.1.2 Chức năng chính của hệ thống và phạm vi ứng dụng thực tiễn
- Chức năng chính của hệ thống:
+ Toàn bộ hệ thống là một dây chuyền để hoàn thành các công đoạn ra thành phẩm. Các khâu trong dây chuyền được tự động hóa cao, con người chỉ tác động vào vận hành, đầu vào và đầu ra. Kết quả mang lại những ưu điểm:
+ Nâng cao năng suất lao động, giảm giá thành: Tổng sản phẩm đầu ra đạt năng suất cao hơn so với hoạt động bằng tay tương ứng. Hệ thống có thể rót hàng nghìn chai mỗi giờ, tùy theo dung tích của chai.
+ Giảm số lượng và chi phí nhân công: Hệ thống chiết rót đã hoạt động một cách tự động dẫn đến công việc ít hơn và đơn giản hơn cho phép cần ít công nhân hơn, tùy theo dung tích của chai.
+ Sự an toàn: Bằng việc tự động hóa các hoạt động và chuyển người vận hành máy từ vị trí tham gia tích cực sang vai trò đốc công, công việc trở nên an toàn hơn.
+ Nâng cao chất lượng sản phẩm: Hệ thống chiết rót không những sản xuất với tốc độ nhanh hơn thủ công, mà còn sản xuất với sự đồng nhất cao hơn và sự chính xác đối với các yêu cầu khắt khe của sản phẩm đóng chai.
+ Tuy nhiên hệ thống chiết rót có chi phí đầu tư cao: việc chuyển từ sử dụng nhân công con người sang dây chuyền sản xuất tự động đòi hỏi chi phí đầu tư ban đầu rất cao. Ngoài ra, cũng cần có chi phí cho việc đào tạo nhân công vận hành các loại thiết bị, máy móc hiện đại và phức tạp.
- Phạm vi ứng dụng:
Các cơ sở sản xuất nước rửa chén, sản xuất nước giải khát, nước tinh khiết, bia… Các sản phẩm chất lỏng hoặc chất lỏng cô đặc có yêu cầu vệ sinh khử trùng cao.
Sử dụng với loại chai có dung tích từ 200 ml - 1000 ml.
Trong đồ án này, nhóm chúng em chọn chai nước Nutri Boost loại nắp vặn có dung tích 297 ml làm đối tượng nghiên cứu.
1.1.3 Kết quả dự tính đạt được
+ Phần lý thuyết:
- Thiết kế cơ khí hệ thống bằng phần mềm Autocad.
- Lập trình điều khiển hệ thống bằng phần mềm TIA PORTAL V16
- Lý thuyết về bộ điều khiển PLC, động cơ DC giảm tốc, xi lanh khí nén, rơ-le, van điện từ khí nén.
- Nghiên cứu, tìm hiểu và điều khiển các cơ cấu xi lanh khí nén.
+ Phần tính toán, thiết kế:
- Thiết kế và chế tạo phần cơ khí.
- Thiết kế và thi công các mạch điều khiển.
1.1.4 Kết cấu của đề tài
Đồ án bao gồm 6 chương, cụ thể:
Chương 1: Tổng quan về hệ thống
- Giới thiệu tổng quan đề tài.
- Tính cấp thiết của đề tài.
Chương 2: Các giải pháp công nghệ
+ Chiết rót nước vào chai
+ Cấp và đóng nắp chai
+ Cơ cấu cảm biến trong dây chuyền chiết rót
+ Cơ cấu đóng thùng sản phẩm
+ Giới thiệu PLC và phần mềm TIA PORTAL V16
+ Giới thiệu về win cc
Chương 3: Quy trình thiết kế cơ khí
- Thiết kế cơ khí cho từng cơ cấu của hệ thống như:
+ Băng tải.
+ Mâm xoay.
+ Cơ cấu cấp nắp tự động.
+ Cơ cấu đóng và vặn nắp
+ Cơ cấu đẩy và gắp chai.
+ Cơ cấu đẩy thùng.
+ Bố trí các cơ cấu để được một hệ thống hoàn chỉnh.
- Tính toán, thiết kế hệ thống truyền động cho từng cơ cấu:
+ Lựa chọn phương án truyền động cho từng cơ cấu.
+ Tính chọn động cơ.
+ Tính chọn xi lanh.
Chương 4: Tính toán và thiết kế hệ thống điều khiển
- Tính toán, thiết kế sơ đồ mạch điều khiển.
- Lựa chọn bộ điều khiển.
- Lựa chọn các loại cảm biến.
- Lựa chọn các loại van khí nén, rơ-le.
- Xây dựng lưu đồ thuật toán.
- Lập trình điều khiển hệ thống.
Chương 5: Kết luận
- Thi công thử nghiệm mô hình.
- Đánh giá kết quả.
Chương 6: Kết luận
- Kết quả đạt được.
- Hạn chế.
- Hướng phát triển đề tài.
Chương 2. Các giải pháp công nghệ
Chương này sẽ trình bày nội dung về các hệ thống chiết rót đóng nắp chai có trên thị trường, cơ sở lý thuyết về PLC, phần mềm TIA – PORTAL 16 và Win cc.
2.1 Tổng quan hệ thống
2.1.1 Chiết rót nước vào chai
Hiện nay có khá nhiều công nghệ chiết nước vào chai, tùy loại chất lỏng sẽ có cách chiết rót khác nhau như: Nước có gaz, nước không gaz, chất lỏng dạng cô đặc. Định lượng sản phẩm lỏng là chiết một thể tích nhất định sản phẩm lỏng và rót vào trong chai, bình, lọ, v.v.. Định lượng sản phẩm lỏng bằng máy được sử dụng rộng rãi trong nhiều ngành sản xuất thực phẩm. Khi định lượng bằng máy thì cải thiện được điều kiện vệ sinh, đảm bảo được năng suất cao và định lượng sản phẩm một cách chính xác.
Các phương pháp định lượng chủ yếu gồm có:
- Định lượng bằng bình định mức: chất lỏng được định lượng chính xác nhờ bình định mức trước khi rót vào chai.
- Định lượng bằng chiết tới mức cố định: chất lỏng được chiết tới mức cố định trong chai bằng cách chiết đầy, sau đó lấy khối thể tích bù trừ ra khỏi chai; khi đó mức lỏng trong chai sẽ sụt xuống một khoảng như nhau bất kể thể tích của các chai có bằng nhau hay không. Ngoài ra còn sử dụng ống thông hơi, chất lỏng được chiết tới khi ngập miệng ống thông hơi sẽ đứng lại. Phương pháp này có độ chính xác không cao, tuỳ thuộc độ đồng đều của chai.
- Định lượng bằng cách chiết theo thời gian: cho chất lỏng chảy vào chai trong khoảng thời gian xác định, có thể xem như thể tích chất lỏng chảy là không đổi. phương pháp nầy chỉ áp dụng cho các sản phẩm có giá tri thấp, không yêu cầu độ chính xác định lượng.
Các phương pháp chiết rót sản phẩm gồm có:
- Phương pháp rót áp suất thường: chất lỏng tự chảy vào trong chai do chênh lệch về độ cao thủy tinh. Tốc độ chảy chậm nên chỉ thích hợp với các chất lỏng ít nhớt.
- Phương pháp rót chân không: Nối chai với một hệ thống hút chân không, chất lỏng sẽ chảy vào trong chai do chênh áp giữa thùng chứa và áp suất trong chai. Lượng chất lỏng chảy vào chai thông thường cũng được áp dụng phương pháp bù trừ hoặc chiết đầy chai.
- Phương pháp rót đẳng áp: Phương pháp này được áp dụng cho các sản phẩm có gas như bia, nước ngọt.Trong khi rót, áp suất trong chai lớn hơn áp suất khí quyển nhằm tránh không cho ga (khí CO2) thoát khỏi chất lỏng. Với phương pháp rót đẳng áp thông thường, người ta nạp khí CO2 vào trong chai cho đến khi áp suất trong chai bằng áp suất trong bình chứa, sau đó cho sản phẩm từ bình chứa chảy vào trong chai nhờ chênh lệch độ cao.
Máy định lượng-chiết rót sản phẩm lỏng gồm nhiều cơ cấu rót, mỗi cơ cấu rót được bố trí chiết cho 1 chai. Các cơ cấu rót có thể được bố trí thẳng hàng, làm việc cùng lúc (máy chiết có cơ cấu chiết thẳng) hoặc bố trí trên bàn quay, làm việc tuần tự (máy chiết bàn quay) như hình bên dưới
Hình 2. 1: Máy chiết bàn quay
2.1.2 Đóng nắp chai
Máy đóng nắp chai được ứng dụng rộng rãi trong ngành sản xuất đồ uống, thức phẩm, mỹ phẩm và hóa chất công nghiệp. Máy có tác dụng đóng bao kín các loại chai thủy tinh, nhựa, đảm bảo việc niêm phóng kín, không rò rỉ chất lỏng ra ngoài.
Nắp chai được dẫn từ thùng chứa xuống đường dẫn đồng thời được xếp đúng chiều, chai nước được đưa vào vị trí dập nắp và cố định để hệ thống dập nắp hoạt động (hình 1.6). Sau khi dập nắp chai sẽ được đưa tới bộ phận vặn nắp để chắc chắn rằng tất cả các nắp phải được đóng kín
Hình 2. 2: Máy chiết rót và đóng nắp chai bàn xoay
2.1.3 Cảm biến trong các dây chuyền chiết rót
Tại mỗi khâu chúng ta dùng cảm biến vị trí để xác định vị trí của sản phẩm. Khi gặp sản phẩm cảm biến sẽ có tín hiệu báo về bộ điều khiển để ra lệnh điều khiển. Để xác định vị trí và dịch chuyển của sản phẩm, ta dùng loại cảm biến quang điện.
Cảm biến quang điện bao gồm 1 nguồn phát quang và 1 bộ thu quang. Nguồn phát quang sử dụng Led hoặc Laser phát ra ánh sáng thấy hoặc không thấy tùy theo bước sóng. 1 bộ thu quang sử dụng diode hoặc transitor quang. Ta đặt bộ thu và phát sao cho vật cần nhận biết có thể che chắn hoặc phản xạ ánh sáng khi vật xuất hiện. Ánh sáng do Led phát ra được hội tụ qua thấu kính. ở phần thu ánh sáng từ thấu kính tác động đến transitor thu quang. Nếu có vật che chắn thì chùm tia sẽ không tác động đến bộ thu được. sóng dao động dùng để bộ thu loại bỏ ảnh hưởng của ánh sáng trong phòng. Ánh sáng của mạch phát sẽ tắt và sáng theo tần số mạch dao động. Phương pháp này sử dụng mạch dao động làm cho cảm biến thu phát xa hơn và tiêu thụ ít công suất hơn.
Trên thị trường hiện nay có 3 loại cảm biến quang điện chính:Through-beam sensors (cảm biến tia xuyên qua), Retro-reflective sensors (cảm biến phản quang), Diffuse reflection sensor (cảm biến phản xạ khuếch tán)
Hình 2. 3:Cảm biến phát quang
Trong quá khứ, đối với nhà máy bia, nước ngọt, việc phát hiện các chai PET có chất liệu trong suốt là rất khó khăn, yêu cầu phải điều chỉnh phức tạp cảm biến cho ứng dụng đó. Hiện nay công nghệ phát triển hơn ta có loại cảm biến phản quang dể dàng phát hiện các vật liệu cho trai PET và thủy tinh. Một trong số đó là bộcảm biến O5G500 và một bộ lọc phân cực cùng với lăng kính phản xạ E20722 (Hình 2.3).
2.1.4 Dây chuyền đóng thùng
Các máy đóng thùng chai hiện nay rất đa dạng từ thô sơ tới cực kỳ hiện đại. tùy theo dạng sản phẩm sẽ có cách đóng gói khác nhau. Với chai lọ thủy tinh dễ vỡ hay các chai có dung tích lớn thường được đóng thùng bằng cánh tay Robot. Phương pháp này hiện đại và chính xác nhất, đảm bảo chống va đập làm hư sản phẩm. Số lượng sản phẩm phụ thuộc vào kích thước thùng chứa, số lượng chai gắp trong một lần cũng dễ dàng cài đặt, ví dụ như để đóng két cho bia chai thì mỗi lần cánh tay robot có thể gắp 20 chai. Dây chuyền đóng thùng gồm 2 băng tải, một băng tải đưa sản phẩm đến tay gắp, một băng vận chuyển thùng, hai băng tải đặt ngang nhau. Bộ phận gắp chai được điểu khiển đồng bộ bằng khí nén.
Hình 2. 4: Bộ phận gắp chai
Hình 2. 5: Một cánh tay robot đang làm việt
Với các loại chai nhỏ và khó vỡ thì thường dùng phương pháp đóng thùng kiểu “Drop” (hình 2.6), hệ thống có hai băng tải, một băng tải chở sản phẩm chai ở phía trên, băng tải chứa thùng phía dưới, khi số chai chạy vào khung đủ số lượng thì phần đáy của khung mở ra để toàn bộ chai trong khung rơi xuống thùng, các chai rơi xuống thùng đồng thời thùng được hạ xuống để giảm lực tác động vàođáy chai, cách đóng thùng này nhanh và đơn giản hơn dùng cánh tay Robot.
Hình 2. 6: Drop packer
2.2 Bộ điều khiển lập trình PLC
2.2.1 Giới thiệu chung về PLC
PLC (Programmable Logic Controller) là thiết bị điều khiển lập trình, được thiết kế chuyên dùng trong công nghiệp để điều khiển các tiến trình xử lý từ đơn giản đến phức tạp, tuỳ thuộc vào người điều khiển mà nó có thể thực hiện một loạt các chương trình hoặc sự kiện, sự kiện này được kích hoạt bởi các tác nhân kích thích (hay còn gọi là đầu vào) tác động vào PLC hoặc qua các bộ định thời (Timer) hay các sự kiện được đếm qua bộ đếm. Khi một sự kiện được kích hoạt nó sẽ bật ON, OFF hoặc phát một chuỗi xung ra các thiết bị bên ngoài được gắn vào đầu ra của PLC. Như vậy nếu ta thay đổi các chương trình được cài đặt trong PLC là ta có thể thực hiện các chức năng khác nhau, trong các môi trường điều khiển khác nhau.
Việc sử dụng PLC trong điều khiển thay thế cho hệ thống mạch điện, rơ-le thông thường mang lại nhiều ưu điểm vượt trội hơn:
+ Sửa đổi linh hoạt bằng chương trình.
+ Độ tin cậy tuổi thọ cao.
+ Hư hỏng có thể theo dõi bằng phần mềm ngoại vi…các mô-đun.
+ có thể được thay thế riêng.
+ Khả năng linh hoạt mở rộng.
Như vậy, PLC là 1 máy tính thu nhỏ nhưng với các tiêu chuẩn công nghiệp cao và khả năng lập trình logic mạnh, PLC là đầu não quan trọng và linh hoạt trong điều khiển tự động hóa.
2.2.2 Cấu trúc của PLC
Hình 2. 7: Cấu trúc cơ bản hệ thống PLC
(Nguồn skytechgroup.vn)
Phần đầu vào/đầu ra: Phần đầu vào hoặc mô-đun đầu vào bao gồm các thiết bị như cảm biến, công tắc và nhiều nguồn đầu vào thế giới thực khác. Đầu vào từ các nguồn được kết nối với PLC thông qua đường ray đầu nối đầu vào. Phần đầu ra hoặc mô-đun đầu ra có thể là một động cơ hoặc một solenoid hoặc một đèn hoặc một lò sưởi, có chức năng được điều khiển bằng cách thay đổi các tín hiệu đầu vào.
CPU: (Central Processing Unit) là đơn vị xử lý trung tâm. Nó là một bộ vi xử lý mà có thể kết hợp với các hoạt động của hệ thống PLC. CPU thi hành chương trình xử lý các tín hiệu I/O và được nối trực tiếp đến các thiết bị I/O thông qua các tuyến đường dây thích hợp bên trong PLC.
Thiết bị lập trình: Đây là nền tảng mà chương trình hoặc logic điều khiển được viết. Nó có thể là một thiết bị cầm tay hoặc một máy tính xách tay hoặc một máy tính chuyên dụng.
Nguồn cung cấp: Nó thường hoạt động trên một nguồn cung cấp điện khoảng 24 V, được sử dụng để cung cấp năng lượng đầu vào và các đầu ra.
Bộ nhớ: Bộ nhớ được chia thành hai phần – Bộ nhớ dữ liệu và bộ nhớ chương trình. Thông tin chương trình hoặc logic điều khiển được lưu trữ trong bộ nhớ người dùng hoặc bộ nhớ chương trình từ nơi CPU tìm nạp các lệnh chương trình. Tín hiệu đầu vào và đầu ra và tín hiệu bộ định thời và bộ đếm được lưu trữ trong bộ nhớ hình ảnh đầu vào và đầu ra tương ứng.
2.2.3 Hoạt động của một PLC
Về cơ bản, hoạt động của một PLC cũng khá đơn giản. Đầu tiên, hệ thống các cổng vào/ra (Input/Output) (còn gọi là các Module xuất/nhập) dùng để đưa các tín hiệu từ các thiết bị ngoại vi vào CPU (như các sensor, contact, tín hiệu từ động cơ …). Sau khi nhận được tín hiệu ở đầu vào thì CPU sẽ xử lý và đưa các tín hiệu điều khiển qua môđun xuất ra các thiết bị được điều khiển.
Hình 2. 8: Sơ đồ hoạt động của PLC
(Nguồn dipslab.com)
Các nguồn đầu vào chuyển đổi tín hiệu điện tương tự thời gian thực sang tín hiệu điện kỹ thuật số phù hợp và các tín hiệu này được đưa đến PLC thông qua đường ray kết nối.
Các tín hiệu đầu vào này được lưu trữ trong bộ nhớ hình ảnh bên ngoài PLC ở các vị trí được gọi là bit. Điều này được thực hiện bởi CPU.
Logic điều khiển hoặc các lệnh chương trình được ghi lên thiết bị lập trình thông qua các ký hiệu hoặc thông qua các phép nhớ và được lưu trữ trong bộ nhớ người dùng.
CPU lấy các lệnh này từ bộ nhớ người dùng và thực thi các tín hiệu đầu vào bằng cách thao tác, tính toán, xử lý chúng để điều khiển các thiết bị đầu ra.
Kết quả thực hiện sau đó được lưu trữ trong bộ nhớ hình ảnh bên ngoài để điều khiển các thiết bị đầu ra.
CPU cũng giữ một kiểm tra trên các tín hiệu đầu ra và tiếp tục cập nhật nội dung của bộ nhớ hình ảnh đầu vào theo những thay đổi trong bộ nhớ đầu ra.
CPU cũng thực hiện chức năng lập trình nội bộ như cài đặt và đặt lại bộ hẹn giờ, kiểm tra bộ nhớ của người dùng.
2.2.4 Lựa chọn bộ điều khiển lập trình PLC
Hiện nay trên thị trường phổ biến các loại PLC của Siemen và Mitsubishi.
Với quy mô đồ án, nhóm lựa chọn sử dụng PLC Siemen bởi các điểm phù hợp với yêu cầu đề tài:
- Các module Analog của Siemens có giá thành rẻ hơn, sử dụng đơn giản (chỉ cần cắm vào PLC và cấu hình qua vài bước là có thể đọc/ghi dễ dàng). Truyền thông đối với PLC Siemens cũng khá dễ dàng để thực hiện bởi Siemens đã có các khối hàm chức năng chuyên dụng hỗ trợ tối đa cho người dùng.
- Cấu trúc chương trình theo cả chiều ngang và chiều dọc, có nghĩa là chương trình vẫn thực hiện tuần tự từ trên xuống dưới, tuy nhiên chương trình ở dạng khối và nhiều khối có thể được thực hiện ngang hàng. Bên cạnh đó chương trình con của Siemens có hỗ trợ biến Local nên có thể sử dụng đa dụng hơn trong lập trình.
- Ứng dụng điều khiển quá trình và truyền thông, việc lập trình ban đầu sẽ khó tiếp cận hơn nhưng khi đã thành thạo sẽ hỗ trợ tốt hơn cho người sử dụng.
PLC của Siemens hiện có các loại sau: S7- 200, S7- 300, S7- 400, S7 - 1200.
Riêng S7- 200 có các loại CPU sau: CPU 210, CPU 214, CPU 221, CPU 222, CPU 224, CPU 226, …. Mới nhất có CPU 224 xp, CPU 226 xp có tích hợp analog.
Sử dụng bộ PLC Siemens S7-1200 CPU1212C DC/DC/DC để điều khiển hệ thống.
2.2.5 Giới thiệu PLC Siemens S7-1200 CPU 1212C DC/DC/DC
- Giới thiệu:
S7-1200 là thiết bị điều khiển logic lập trình loại nhỏ của hãng Siemens, có cấu trúc theo kiểu module và có các module mở rộng. Các module này đươc sử dụng cho nhiều ứng dụng lập trình khác nhau.
S7-1200 được thiết kế nhỏ gọn, chi phí thấp, và tập lệnh có đủ lệnh bit logic, so sánh, bộ đếm, dịch/quay thanh ghi, timer cho phép lập trình điều khiển Logic dễ dàng.
S7 – 1200 là một dòng của bộ điều khiển logic khả trình (PLC) có thể kiểm soát nhiều ứng dụng tự động hóa. Thiết kế nhỏ gọn, chi phí thấp và một tập lệnh mạnh làm cho chúng ta có những giải pháp hoàn hảo hơn cho ứng dụng sử dụng với S7 – 1200.
S7 – 1200 bao gồm một microprocessor, một nguồn cung cấp được tích hợp sẵn, các đầu vào vào/ra (DI/DO).
Một số tính năng bảo mật giúp bảo vệ quyền truy cập vào cả CPU và chương trình điều khiển.
S7 – 1200 cung cấp một cổng PROFINET, hỗ trợ chuẩn Ethernet và TCP/IP. Ngoài ra bạn có thể dùng các module truyền thông mở rộng kết nối bằng RS485 hoặc RS232.
Phần mềm dùng để lập trình cho S7 – 1200 là Step 7 Basic. Step 7 basic hỗ trợ ba ngôn ngữ lập trình là FBD, LAD và SCL. Phần mềm này được tích hợp trong TIA Portal của Siemens.
Các module CPU khác nhau có hình dạng, chức năng, tốc độ xử lý lệnh, bộ nhớ chương trình khác nhau. PLC S7 – 1200 có các loại sau:
Phân vùng bộ nhớ
|
Tính năng |
CPU 1211C |
CPU 1212C |
CPU 1214C |
CPU 1215C |
|
|
Kích thước vật lý (mm) |
90x100x75 |
90x100x75 |
110x100x75 |
130x100x75 |
|
|
Bộ nhớngười dùng |
Work |
30 Kbytes |
50 Kbytes |
75 Kbytes |
100 Kbytes |
|
Load |
1 Mbyte |
1 Mbyte |
4 Mbyte |
4 Mbyte |
|
|
Retentive |
10 Kbytes |
10 Kbytes |
10 Kbytes |
10 Kbytes |
|
|
I/O tích hợp trên CPU |
Kiểu số |
6 Inputs / 4 Out |
8 Inputs / 6 Out |
14 Inputs / 10 Out |
14 Inputs / 10 Out |
|
Kiểu tương tự |
2 inputs |
2 inputs |
2 inputs |
2 inputs / 2 outputs |
|
|
Kích thước bộ đệm |
Inputs |
1024 bytes |
1024 bytes |
1024 bytes |
1024 bytes |
|
Outputs |
1024 bytes |
1024 bytes |
1024 bytes |
1024 bytes |
|
|
Bit nhớ (M) |
4096 bytes |
4096 bytes |
4096 bytes |
4096 bytes |
|
|
Module mở rộng vào ra (SM) |
none |
2 |
8 |
8 |
|
|
Board tín hiệu (SB) Board pin (BB) Board truyền thông (CB) |
1 |
1 |
1 |
1 |
|
|
Module truyền thông (CM) |
3 |
3 |
3 |
3 |
|
|
Bộ đếm tốc độ cao |
Total |
3 built – in I/O, 5 with SB |
4 built – in I/O, 6 with SB |
6 |
6 |
|
Singephase |
3 at 100kHz SB: 2 at 30kHz |
3 at 100kHz 1 at 30kHz |
3 at 100kHz 3 at 30kHz |
3 at 100kHz 3 at 30kHz |
|
|
|
|
SB: 2 at 30kHz |
|
|
|
|
Quadrature phase |
3 at 80kHz SB: 2 at 20kHz |
3 at 80kHz 1 at 20kHz SB: 2 at 20kHz |
3 at 80kHz 3 at 20kHz |
3 at 100kHz 3 at 20kHz |
|
|
Ngõ ra xung |
4 |
4 |
4 |
4 |
|
|
Card nhớ |
SIMATIC Memory Card (optional) |
||||
|
Lưu trữ thời gian đồng hồ thời gian thực |
Chuẩn là 20 ngày, nhỏ nhất là 12 ngày ở nhiệt độ 400C (duy trì bằng tụ điện có điện dung lớn) |
||||
|
PROFINET |
1 cổng truyền thông Ethernet |
2 cổng truyền thông Ethernet |
|||
|
Tốc độ thực thi phép toán thực |
2.3 µs/lệnh |
||||
|
Tốc độ thực thi logic Boolean |
0.08 µs/lệnh |
||||
Bảng 2. 1: Một số CPU S7 - 1200
PLC có 3 loại bộ nhớ sử dụng là Load memory, Work memory và Retentive Memory:
ü Load memory chứa bộ nhớ của chương trình khi down xuống.
ü Work memory là bộ nhớ lúc làm việc.
ü System memory thì có thể setup vùng này trong Hardware config, chỉ cần chứa các dữ liệu cần lưu vào đây.
|
Bộ nhớ |
CPU 1211C |
CPU 1212C |
CPU 1214C |
|
Load memory |
1 Mb |
2 Mb |
|
|
Work memory |
25 Kb |
50 Kb |
|
|
System memory |
2 Kb |
2 Kb |
|
Bảng 2. 2: Phân vùng bộ nhớ
Tập lệnh S7 1200
|
Tiếp điểm thường hở sẽ đóng khi giá trị của bit có địa chỉ là n bằng 1. Toán hạng n: I, Q, M, L, D. |
|
|
Tiếp điểm thường đóng sẽ đóng khi giá trị của bit có địa chỉ n là 0. Toán hạng n: I, Q, M, L, D. |
|
|
|
Giá trị của bit có địa chỉ là n sẽ bằng 1 khi đầu vào của lệnh này bằng 1 và ngược lại. Toán hạng n: Q, M, L, D. Chỉ sử dụng một lệnh out cho 1 địa chỉ. |
|
|
Giá trị của bit có địa chỉ là n sẽ bằng 1 khi đầu vào của lệnh này bằng 0 và ngược lại. Toán hạng n: Q, M, L, D. Chỉ sử dụng một lệnh out not cho 1 địa chỉ. |
|
|
|
|
|
Bảng 2. 3: Tập lệnh xử lý bít
|
Timer trễ không nhớ – TON Khi ngõ vào IN ngừng tác động thì reset và dừng hoạt động Timer. Thay đổi PT khi Timer vận hành không có ảnh hưởng gì.
|
|
Counter đếm lên – CTU. Giá trị bộ đếm CV được tăng lên 1. Khi tín hiệu ngõ vào CU chuyển từ 0 lên 1. Ngõ ra Q được tác động lên 1 khi CV >= PV. Nếu trạng thái R = Reset được tác động thì bộ đếm CV = 0.
|
Bảng 2. 4: Tập lệnh Timer, Counter
|
|
Lệnh so sánh dùng để so sánh hai giá trị IN1 và IN2 bao gồm IN1= IN2, IN1>= IN2, IN1<= IN2, IN1< IN2, IN1> IN2,IN1<> IN2. So sánh 2 kiểu dữ liệu giống nhau, nếu lệnh so sánh thỏa mãnthì ngõ ra sẽ là mức 1 = TRUE( tác động mức cao) và ngược lại.Kiểu dữ liệu so sánh là: SInt, Int, Dint, USInt, UDInt, Real, Lreal, String, Time, DTL, Constant. |
|
Lệnh cộng ADD: OUT = IN1 +IN2. LệnhtrừSUB : OUT = IN1 -IN2. Tham số IN1, IN2 phải cùng kiểu dữ liệu: Sint, Int, Dint, USInt, Uint, UDInt, Real, Lreal, Constant. Tham số OUT có kiểu dữ liệu: Sint, Int, Dint, USInt, Uint, UDInt, Real, Lreal. ThamsốENO=1nếukhôngcólỗixảyratrongquátrìnhthực thi. Ngược lại ENO = 0 khi có lỗi, một số lỗi xảy ra khi thực thi lệnhnày: Kết quả toán học nằm ngoài phạm vi của kiểu dữ liệu. Real/Lreal: Nếu một trong những giá trị đầu vào là NaN sau đó được trả về NaN. ADD Real/Lreal: Nếu cả hai giá trị IN là INF có dấu khác nhau, đây là một khai báo không hợp lệ và được trả về NaN |
Bảng 2. 5: Tập lệnh toán học
|
|
Lệnh Move di chuyển nội dung ngõ vào IN đến ngõ ra OUT mà không làm thay đổi giá trị ngõ IN. Tham số: EN: cho phép ngõ vào. ENO: cho phép ngõ ra. IN: nguồn giá trị đến. OUT1: nơi chuyển đến. |
Bảng 2. 6: Tập lệnh di chuyển
2.3 Giới thiệu phần mềm lập trình TIA Portal V16
2.3.1 Giới thiệu SIMATIC STEP 7 Basic
Step 7 Basic hệ thống kỹ thuật đồng bộ đảm bảo hoạt động liên tục hoàn hảo. Thông minh và trực quan cấu hình phần cứng kỹ thuật và cấu hình mạng, lập trình, chuẩn đoán và nhiều hơn nữa. Trực quan dễ dàng để tìm hiểu và dễ dàng để hoạt động.
2.3.2 Các bước tạo một project
Bước 1: Từ màn hình desktop nhấp đúp chọn biểu tượng TIA Portal V16
1.1 Đánh giá kết quả
Trải qua quá trình thiết kế và chế tạo mô hình của nhóm, thông qua quá trình chạy thử nhiệm kết quả, nhóm em nhận thấy hệ thống có thể hoạt động thực tế, hệ thống hoạt động ổn định, thực hiện đầy đủ các công đoạn yêu cầu , độ sai lệch ghi nhận ở mức thấp, có thể hoạt động thời gian dài, hệ thống. Mô hình hực hiện đủ các công đoạn của hệ thống. Bộ phận bơm, cấp nắp, đóng nắp, vặn nắp, gắp chai hoạt động hiệu quả với tỉ lệ sai lệch thấp,Bộ phận đẩy chai đưa 6 chai đến vị trí gắp đóng thùng hoạt động chính xác,băng tải có thể chạy liên tục đảm bảo năng suất và tuổi thọ.
Chương 2. Kết luận
Trải qua quá trình làm nghiên cứu và làm “ HỆ THỐNG CHIẾT RÓT XOÁY NẮP VÀ ĐÓNG THÙNG SẢN PHẨM TỰ ĐỘNG “ nhóm em đã thống kê được những kết quả đạt được cũng như những mặt hạn chế như sau:
Kết quả đạt được:
- Thực hiện đề tài theo đúng tiến độ đã đề ra
- Hoàn thành hệ thống có mô hình thực tế, có giao diện giám sát và điều khiển
- Hệ thống vận hành đầy đủ các công đoạn đã đề ra ban đầu
- Hệ thống có sự cải tiến về khâu đóng thùng sản phẩm, cải tiến hơn đối với mô hình chiết rót và đóng nắp hiện có
- Tiết kiệm tối đa chi phí chế tạo so với dự liệu.
hạn chế :
- Chưa thể tự động hóa cơ cấu cấp nắp và cấp thùng cho hệ thống
- Chưa có hệ thống kiểm tra chất lượng sản phẩm đầu ra
- Hệ thống có nhiều chi tiết được chế tạo thủ công nên hoạt động chưa được ổn định
- Còn nhiều chi tiết được chế tạo chưa có bản vẽ chi tiết
Hướng phát triển:
- Sử dụng nhiều cảm biến hơn để đảm bảo hệ thống vận hành ổn định
- Cải tiến các chi tiết cơ khí để tránh sảy ra sai sót không mong muốn .
- Sử dụng cảm biến có độ chính xác cao hơn trong quá trình phát hiện vật thể.
- Tự động hóa quá trình cấp nắp và cấp thùng.
- Nghiên cứu phát triển cơ cấu kiểm tra chất lượng sản phẩm đầu ra.
- Cải tiến mô hình với các bước gia công chính xác để đạt chất lượng và năng suất cao hơn.
- Dựa trên kết quả đạt được, nghiên cứu ứng dụng vào các hệ thống chiết rót nước giải khát, bia rượu và những dung dịch khác









