ĐỒ ÁN MÔN HỌC CƠ ĐIỆN TỬ THIẾT KẾ MÔ HÌNH ĐIỀU HƯỚNG PIN MẶT TRỜI


NỘI DUNG ĐỒ ÁN
LỜI MỞ ĐẦU
So với những nguồn năng lượng như thủy điện ,nhiệt điện nguồn năng lượng mới đang được khai thác sử dụng như năng lượng gió, năng lượng hạt nhân… Năng lượng mặt trời được coi là một nguồn năng lượng rẻ, vô tận, là một nguồn năng lượng sạch không gây hại cho môi trường đang thu hút sự quan tâm của rất nhiều nhà khoa học, nhà nghiên cứu và sẽ trở thành nguồn năng lượng tốt nhất trong tương lai. Hệ thống quang điện sử dụng năng lượng mặt trời (Hệ pin mặt trời) có nhiều ưu điểm như không cần nguyên liệu, không gây ô nhiễm môi trường, ít phải bảo dưỡng, không gây tiếng ồn… Hiện nay năng lượng mặt trời đã được khai thác và đưa vào ứng dụng trong cuộc sống cũng như trong công nghiệp dưới nhiều dạng và hình thức khác nhau.Một hệ pin mặt trời sử dụng năng lượng mặt trời cơ bản bao gồm 2 loại: Hệ pin mặt trời làm việc độc lập và hệ pin mặt trời làm việc với lưới. Tùy theo điều kiện về nhu cầu sử dụng và vị trí địa lý lắp đặt mà hệ nào được ứng dụng.
Đồ án môn học Thiết kế cơ điện tử này nhóm em tập trung vào giải thuật điều hướng kép tấm pin mặt trời xoay theo bức xạ ánh nắng để năng lượng thu nhận được là lớn nhất. Trong quá trình thực hiện đồ án, em đã củng cố được những kiến thức đã được học và tiếp thu thêm được một số kiến thức và kinh nghiệm mới về pin mặt trời. Trên tất cả là em đã được học và rèn luyện được phương pháp làm việc, nghiên cứu một cách chủ động hơn, linh hoạt hơn và đặc biệt là phương pháp làm việc theo nhóm. Quá trình làm đồ án thực sự đã rất có ích cho em về nhiều mặt.
CHƯƠNG I. TỔNG QUAN ,PHÂN TÍCH CÁC PHƯƠNG ÁN ,LỰA CHỌN PHƯƠNG ÁN THIẾT KẾ.
1.1. Lý do chọn đề tài
Đối với loài người, năng lượng mặt trời là nguồn năng lượng vô cùng vô tận và quý báu. Chúng ta đã biết tận dụng nguồn năng lượng tái tạo này dựa trên các tấm pin mặt trời để tạo ra nhiều sản phẩm phục vụ cho lợi ích cá nhân (hệ thống nước nóng, phương tiện đi lại, hệ thống đèn chiếu sáng, hệ thống điện trong dân dụng…). Hiệu suất của tấm pin quang điện hiện nay chỉ đạt được tối đa là 17,6% so với lượng nhiệt mà nó nhận được từ mặt trời. Tuy nhiên công việc nâng cao hiệu suất của nó vẫn luôn đang diễn ra mạnh mẽ. Do giá thành đắt đỏ và hiệu suất không cao nên pin quang điện chưa được sự quan tâm nhiều ở các nước đang phát triển.
Vì vậy, vấn đề tạo ra các thiết bị nhằm đạt được điểm công suất tối ưu của tấm pin là việc cần thiết. Trước đây, khi tấm pin còn ở hiệu suất thấp thì nhà sản xuất phải cần một số lượng lớn và tiêu tốn chi phí vật tư mà hiệu quả mang lại thì không đáng kể. Vì vậy, pin mặt trời trước đây được bán với giá thành rất đắt đỏ và không là giải pháp kinh tế của người tiêu dùng. Ngày nay với công nghệ hiện đại hơn, những tấm pin hiệu suất cao cũng đã được sản xuất, nhưng với chi phí khá cao, do đó việc đầu tư nhiều tấm pin sản xuất ra điện năng phục vụ cho nhu cầu cuộc sống cũng khó khăn. Cần đưa ra những giải pháp tiết kiệm chi phí đầu tư tấm pin năng lượng mặt trời là khả thi. Ứng dụng những nguyên lý của điện tử cơ bản, và công nghệ vi điều khiển đáp ứng thực hiện nâng cao hiệu suất thu năng lượng của tấm pin năng lượng mặt trời
Xuất phát từ ý tưởng đó, nhóm chúng em đã nghiên cứu và thực hiện đề tài : “TỰ ĐỘNG ĐIỀU HƯỚNG KÉP PIN NĂNG LƯỢNG MẶT TRỜI THEO BỨC XẠ” nhằm phát triển hệ thống nguồn năng lượng sạch, tiết kiệm chi phí và nâng cao chất lượng đầu tư hệ thống điện năng lượng mặt trời.
1.2Phân bố bức xạ mặt trời ở Việt Nam.
-Phân bố bức xạ mặt trời tại Việt Nam Trải dài từ vĩ độ8030' Bắc đến 23022 Bắc .
-Việt Nam nằm trong khu vực có cường độ bức xạ mặt trời tương đối cao. Trong đó, nhiềunhấtphảikểđếnthànhphốHồChíMinh,tiếpđếnlàcácvùngTâyBắc(LaiChâu, SơnLa,LàoCai)vàvùngBắcTrungBộ(ThanhHóa,NghệAn,HàTĩnh)…Nănglượng mặttrờiởViệtNamcósẵnquanhnăm,kháổnđịnhvàphânbốrộngrãitrêncácvùng miền khác nhau của đất nước. Đặc biệt, số ngày nắng trung bình trên các tỉnh của miền Trung và miền Nam là khoảng 300 ngày/năm .
Hình Phân bố cường độ bức xạ ở Việt Nam.
|
TT |
Khu vực |
Cường độ BXMT (kWh/m2/ngày) |
Số giờ nắng trung bình (giờ/năm) |
|
1 |
Đông Bắc Bộ |
3,3 - 4,1 |
1500 – 1800 |
|
2 |
Tây Bắc Bộ |
4,1 – 4,9 |
1890 – 2102 |
|
3 |
Bắc Trung Bộ |
4,6 – 5,2 |
1700 – 2000 |
|
4 |
Nam Trung Bộ – Tây Nguyên |
4,9 – 5,7 |
2000 – 2600 |
|
5 |
Nam Bộ |
4,3 – 4,9 |
2200 – 2500 |
|
|
Trung bình cả nước |
4,6 |
2000 |
Giá trị trung bình cường độ bức xạ bức xạ ngày trong năm và số giờ nắng của một số khu vực khác nhau ở Việt Nam.
1.3. Đối tượng và phạm vi nghiên cứu
Trong nghiên cứu thiết kế hệ thống các vấn đề được quan tâm bao gồm:
-Điện áp ra của pin mặt trời thay đổi theo điều kiện chiếu sáng của mặt trời.
-Nghiên cứu cải thiện nâng cao hiệu suất thu NLMT bằng cách tự động thay đổi hướng của pin mặt trời nhằm bám theo mặt trời để thu được hiệu suất cao nhất.
+Nội dung nghiên cứu được trình bày bao gồm các phần chính như sau:
-Nghiên cứu phương pháp nhận biết vị trí mặt trời, dùng quang trở nhằm đơn giản hóa chi phí thiết kế hệ thống.
-Thiết kế mạch điều khiển tấm pin năng lượng theo vị trí mặt trời.
-Nghiên cứu thiết kế hệ thống định hướng pin năng lượng theo vị trí mặt trời.
-Khảo nghiệm, lấy số liệu và so sánh hiệu suất giữa hai trường hợp khi hệ thống được đặt cố định và khi sử dụng thiết bị tự động định hướng.
-Thiết kế mạch điều khiển, mạch giảm áp ,mạch cảm biến ánh sáng.
-Viết lưu đồ giải thuật, viết chương trình điều khiển cho vi điều khiển sử dụng arduino cấp xung cho động cơ serrvo.
-Đánh giá hoạt động của mô hình.
Phạm vi áp dụng
Sử dụng tấm pin năng lượng loại nhỏ 1W làm mô hình cho hệ thống và áp dụng các nguyên lý cơ bản của điện tử cơ bản ,áp dụng thiết kế mạch điều khiển động cơ để xoay tấm pin theo bức xạ.
1.4Khái quát về pin mặt trời.
-Pin mặt trời (Solar panel) gồm nhiều tế bào quang điện (solar cells) - là phần tử bán dẫn có chứa trên bề mặt một số lượng lớn các cảm biến ánh sáng là diode quang, thực hiện biến đổi năng lượng ánh sáng thành năng lượng điện. Cường độ dòng điện, hiệu điện thế hoặc điện trở của pin Mặt trời thay đổi phụ thuộc bởi lượng ánh sáng chiếu lên chúng. Tế bào quang điện được ghép lại thành khối để trở thành pin mặt trời (thông thường 60 hoặc 72 tế bào quang điện trên một tấm pin mặt trời). Tế bào quang điện có khả năng hoạt động dưới ánh sáng mặt trời hoặc ánh sáng nhân tạo.
-Hiện nay vật liệu chủ yếu cho pin mặt trời là các silic tinh thể. Pin mặt trời từ tinh thểsilicchiatành3loại:mono(đơntinhthể),poly(đatinhthể),thin-film(màngmỏng).
-Để tạo ra tinh thể Silic có khả năng dẫn điện tốt, người ta phải thêm một lượng nhỏ các nguyên tử nhóm III hay nhóm V trong bảng tuần hoàn hóa học vào các nguyên tử SilicởnhómIV.KhiSilickếthợpvớinguyêntửnhómIII(nhômhaygali)tạothànhbán dẫn loại p (positive, mang năng lượng dương), khi Silic kết hợp với nguyên tử nhóm V (photpho hay asen) thì tạo ra bán dẫn loại n (negative, mang năng lượngâm).
Quá trình hình thành pin mặt trời.
+Nguyên lý hoạt động pin mặttrời.
-Về cấu tạo pin mặt trời bao gồm một lớp tiếp xúc bán dẫn p -n có khả năng biến đổi trựctiếpnănglượngbứcxạmặttrờithànhđiệnnhờhiệuứngquangđiệnđượcgọilàpin mặttrời.Khiánhsángchiếutớipinmặttrời,nănglượngtừánhsáng(cácphoton)tạora các hạt mang điện tự do, được tách ra bởi điện trường. Điện áp được tạo ra và đo được tại các điểm tiếp xúc bên ngoài, vì vậy ta đo được giá trị dòng quang điện khi có tải kết nốivào.Dòngquangđiệnđượctạoratrongpinmặttrờivàtỷlệthuậnvớicườngđộbức xạ.Pinquangđiện(pinmặttrời)tiêubiểuchothiếtbịchuyểnđổicơbảnnănglượngmặt trời thành năng lượng điện. Cường độ nắng, nhiệt độ của tế bào quang điện và điện áp vận hành ảnh hưởng lớn đến đặc tính công suất và dòng điện ngõ ra của pin mặt trời .
Sơ đồ tương đương của pin mặt trời.
-Khi nhận được ánh sáng, pin mặt Trời phát ra một dòng quang điện Ip. Vì vậy có thể xem Pin măt trời tương đương như một nguồn dòng.
-Lớp bán dẫn p-n có tính chất chỉnh lưu tương đương như một diode.
-Khi phân cực ngược, do điện trở lớp tiếp xúc có giới hạn, nên vẫn có một dòng điện gọi là dòng rò. Do đó ta có thể xem ngay tại đó có 1 điện trở Rp giá trị rất lớn.
-Khidòngquangđiệnchạytrongmạch,nóđiquacáclớpbándẫnp,n,cácđiệncực,… Vì thế ta có thể xem đó như một điện trở Rs nối tiếp vớimạch.
1.5 Phương án hệ thống điều hướng pin mặt trời.
1.5.1Nguyên tắcđiều hướng.
-Tấm pin năng lượng mặt trời đạt hiệu suất cao nhất khi phương của tia sáng mặttrời vuông góc với mặt phẳng củanó.
Mô tả góc tới tia ánh sáng mặt trời đối với đối với mặt phẳng tấm pin.
Nguyên tắc xoay của mô hình là luôn luôn hướng pin vào mặt trời sao cho ánh sáng luônchiếu1góc90độvàomặtphẳngtấmpin,ngoàiracóthểkếthợpvớibộđiềukhiển MPPT để bám được điểm MPP. Nguyên tắc này là cơ sở để thiết kế kiểu xoay của hệ thống pin mặttrời.
1.5.2 Các hệ thống điều hướng pin mặt trời.
Trên thế giới hiện nay có hai loại hệ thống năng lượng mặt trời định hướng, đó làhệ thống định hướng theo trục đơn và hệ thống định hướng theo trục kép. Hệ thống điều hướng theo trục đơn sẽ điều hướng tấm pin theo vị trí Mặt Trời mọc từ Đông sang Tây trênmộttrụcđặttheohướngBắcNam.Hệthốngđiềuhướngtheotrụcképsẽđiềuhướng tấm pin theo hướng Đông sang phía Tây và Bắc đến phíaNam.
Các hệ thống với các kiểu xoay tấm pin khác nhau.
1.5.2.1Hệ thống điều hướng theo một trục
Đặc điểm của hệ thống định hướng theo 1 trục.
-Định hướng theo vị trí mặt trời từ Đông sang Tây bằng cách sử dụng một trục xoay
-Tănghiệusuấtthunănglượngmặttrờitới25 %sovớidànpincốđịnh
-Thiết kế đơn giản, dễ lắp ráp, vận hành và bảo dưỡng phù hợp ở những vị trí có vĩ độlớn.
-Tần suất bảo trìthấp.
-Giá thành vật tư thấp hơn so với hệ thống sử dụng 2 trụcxoay.
-Khả năng hư hỏng các thành phầnthấp
+Tuy nhiên, kiểu dàn này không có tính ổn định cao và cần đặt vị trí ban đầu trước khi vận hành.
1.5.2.2 Hệ thống điều hướng theo 2 trục.
+Đặc điểm của hệ thống điều hướng dàn pin năng lượng theo 2 trục:
-ĐiềuhướngxoaytấmpintheovịtríMặtTrờitừĐôngsangTây,vàphíaBắcđến phía Nam bằng cách sử dụng hai trụcquay.
-Có thể tăng hiệu suất thu năng lượng mặt trời 37% so với dàn cố định (Tùy điều kiện thời ---tiết, giả thiết đưa ra với điều kiện thuận lợi nhất).
-Thi công hệ thống phức tạp về mặt cơ khí lẫn điều khiển động cơxoay.
-Chi phí đầu tư gấp đôi so với hệ thống điều hướng chỉ theo mộttrục.
-Bảo trì, bảo dưỡng phức tạp hơn hệ thống cố định và điều hướng theo mộttrục.
-Các bộ phận nhiều hơn so với hệ thống cố định,tăng khả năng hưhỏng.
+Tấmpinhaitrụcxoay,mộttrụcthẳngđứngxoayvàmộttrụcnằmngangxoay.Trong loạiđiềuhướngtheo2trụcnày,tấmpinđượclắptrênmộtdànriêng.Ưuđiểmchínhcủa hệ thống này là góc quay của dàn lớn, đến 3600, qua đó sẽ thu được ánh sáng mặt trời nhiều hơn, đạt hiệu suất cao. Tuy nhiên, kiểu dàn này không có tính ổn định cao và cần đặt vị trí ban đầu trước khi vận hành, cần nhiều kết cấu, lắp ráp, vận hành phứctạp.
1.5.3 Lựa chọn phương án kiểu xoay mô hình
|
|
Hệ thống điều hướng 1 trục xoay |
Hệ thống điều hướng 2 trục xoay |
|
Ưu điểm |
Tăng hiệu suất thu năng lượng mặt trời so với dàn pin cốđịnh. Đơn giản, dễ thi công hệ thống. Tần suất bảo trìthấp. Giá thành đầu tư chấp nhận được. Khả năng hư hỏng các thành phần trong hệ thống thấp. |
Tăng hiệu suất thu năng lượng cao nhất trong các hệ thống. Phạm vi áp dụng rộng rãi, không cần đặt dàn pin với hướng chotrước. Giảm số lượng tấm pin trong hệthống nhưng có thể cho lượng điện năng tương đương so với dàn cố định. |
|
Nhược điểm |
Với điều kiện vận hành (thời tiết, độ cao lắp đặt, vị trí địa phương...) không thuận lợi thì hiệu suất không nâng cao đáng kể so với dàn cốđịnh. Phải đặt góc nghiêng ban đầu (vì hệ thống chỉ xoay được theo 1trục). |
Thi công hệ thống phức tạp về mặt cơ khí lẫn điều khiển động cơ xoay. Chi phí đầu tư và vận hành lớn hơn hệ thống điều hướng chỉ theo mộttrục. Bảo trì, bảo dưỡng phức tạp. Khả năng hư hỏng cao hơn so với các hệ thống khác. |
Ưu, nhược điểm của hai hệ thống điều hướng pin mặt trời.
CHƯƠNG II. TÍNH TOÁN VỀ CƠ KHÍ,MẠCH ĐIỆN ĐIỀU KHIỂN.
Sơ đồ khối thiết kế
Tổng quan về thành phần:
-Hệ thống trục đỡ, trụcxoay.
-Tấm pin năng lượng mặttrời.
-Nguồn điện qua mạch giảm áp dùng để nạp điện và nuôi mạch điều khiển cùng hai động cơ.
-Hai động cơ Servo với chức năng xoay 2trục.
-Bộ cảm biến hướng sáng được gắn trên đầu tấmpin
-Vi xử lí Arduino đóng vai trò xử lí tín hiệu đầu vào và điềukhiển.
Các mạch giảm áp, bảng điều khiển bằng tay và hiển thị thông số. Từ sơ đồ này, tính toán và lựa chọn thiết bị phùhợp.
2.1 Tổng quan về linh kiện điện tử
1)Arduino UNO R3
Giới thiệu về Arduino UNO R3
Arduino thực sự đã gây sóng gió trên thị trường người dùng DIY (là những người tự chế ra sản phẩm của mình) trên toàn thế giới trong vài năm gần đây, gần giống với những gì Apple đã làm được trên thị trường thiết bị di động. Số lượng người dùng cực lớn và đa dạng với trình độ trải rộng từ bậc phổ thông lên đến đại học đã làm cho ngay cả những người tạo ra chúng phải ngạc nhiên về mức độ phổ biến.
Những thành viên khởi xướng Arduino
-Arduino là gì mà có thể khiến ngay cả những sinh viên và nhà nghiên cứu tại các trường đại học danh tiếng như MIT, Stanford, Carnegie Mellon phải sử dụng; hoặc ngay cả Google cũng muốn hỗ trợ khi cho ra đời bộ kit Arduino Mega ADK dùng để phát triển các ứng dụng Android tương tác với cảm biến và các thiết bị khác?
-Arduino thật ra là một bo mạch vi xử lý được dùng để lập trình tương tác với các thiết bị phần cứng như cảm biến, động cơ, đèn hoặc các thiết bị khác. Đặc điểm nổi bật của Arduino là môi trường phát triển ứng dụng cực kỳ dễ sử dụng, với một ngôn ngữ lập trình có thể học một cách nhanh chóng ngay cả với người ít am hiểu về điện tử và lập trình. Và điều làm nên hiện tượng Arduino chính là mức giá rất thấp và tính chất nguồn mở từ phần cứng tới phần mềm. Mà nhắc tới dòng mạch Arduino dùng để lập trình, cái đầu tiên mà người ta thường nói tới chính là dòng Arduino UNO. Hiện dòng mạch này đã phát triển tới thế hệ thứ 3 (R3).
: Bo mạch Arduino UNO R3
Một vài thông số của Arduino UNO R3
|
Vi điều khiển |
ATmega328 họ 8bit |
|
Điện áp hoạt động |
5V DC (chỉ được cấp qua cổng USB) |
|
Tần số hoạt động |
16 MHz |
|
Dòng tiêu thụ |
khoảng 30mA |
|
Điện áp vào khuyên dùng |
7-12V DC |
|
Điện áp vào giới hạn |
6-20V DC |
|
Số chân Digital I/O |
14 (6 chân hardware PWM) |
|
Số chân Analog |
6 (độ phân giải 10bit) |
|
Dòng tối đa trên mỗi chân I/O |
30 mA |
|
Dòng ra tối đa (5V) |
500 mA |
|
Dòng ra tối đa (3.3V) |
50 mA |
|
Bộ nhớ flash |
32 KB (ATmega328) với 0.5KB dùng bởi bootloader |
|
SRAM |
2 KB (ATmega328) |
|
EEPROM |
1 KB (ATmega328) |
Arduino UNO có thể sử dụng 3 vi điều khiển họ 8bit AVR là ATmega8, ATmega168, ATmega328. Bộ não này có thể xử lí những tác vụ đơn giản như điều khiển đèn LED nhấp nháy, xử lí tín hiệu cho xe điều khiển từ xa, làm một trạm đo nhiệt độ - độ ẩm và hiển thị lên màn hình LCD,… hay những ứng dụng khác.
+Các chân năng lượng
GND (Ground): cực âm của nguồn điện cấp cho Arduino UNO. Khi dùng các thiết bị sử dụng những nguồn điện riêng biệt thì những chân này phải được nối với nhau.
5V: cấp điện áp 5V đầu ra. Dòng tối đa cho phép ở chân này là 500mA.
3.3V: cấp điện áp 3.3V đầu ra. Dòng tối đa cho phép ở chân này là 50mA.
Vin (Voltage Input): để cấp nguồn ngoài cho Arduino UNO, nối cực dương của nguồn với chân này và cực âm của nguồn với chân GND.
IOREF: điện áp hoạt động của vi điều khiển trên Arduino UNO có thể được đo ở chân này. Và dĩ nhiên nó luôn là 5V. Dù vậy không được lấy nguồn 5V từ chân này để sử dụng bởi chức năng của nó không phải là cấp nguồn.
RESET: việc nhấn nút Reset trên board để reset vi điều khiển tương đương với việc chân RESET được nối với GND qua 1 điện trở 10KΩ.
Lưu ý:
Arduino UNO không có bảo vệ cắm ngược nguồn vào. Vì thế ta phải hết sức cẩn thận, kiểm tra các cực âm – dương của nguồn trước khi cấp cho Arduino UNO.
Các chân 3.3V và 5V trên Arduino là các chân dùng để cấp nguồn ra cho các thiết bị khác, không phải là các chân cấp nguồn vào. Nên việc cấp nguồn sai vị trí có thể làm hỏng board.
Cấp nguồn ngoài không qua cổng USB cho Arduino UNO với điện áp dưới 6V có thể làm hỏng board.
Cấp điện áp trên 13V vào chân RESET trên board có thể làm hỏng vi điều khiển ATmega328.
Cường độ dòng điện vào/ra ở tất cả các chân Digital và Analog của Arduino UNO nếu vượt quá 200mA sẽ làm hỏng vi điều khiển.
Cấp điệp áp trên 5.5V vào các chân Digital hoặc Analog của Arduino UNO sẽ làm hỏng vi điều khiển.
Cường độ dòng điện qua một chân Digital hoặc Analog bất kì của Arduino UNO vượt quá 40mA sẽ làm hỏng vi điều khiển. Do đó nếu không dùng để truyền nhận dữ liệu, phải mắc một điện trở hạn dòng.
+ Bộ nhớ
Vi điều khiển Atmega328 tiêu chuẩn cung cấp cho người dùng:
32KB bộ nhớ Flash: những đoạn lệnh bạn lập trình sẽ được lưu trữ trong bộ nhớ Flash của vi điều khiển.
2KB cho SRAM (Static Random Access Memory): giá trị các biến khai báo khi lập trình sẽ lưu ở đây. Khai báo càng nhiều biến thì càng cần nhiều bộ nhớ RAM.
1KB cho EEPROM (Electrically Eraseble Programmable Read Only Memory): đây giống như một chiếc ổ cứng mini – nơi có thể đọc và ghi dữ liệu vào đây mà không phải lo bị mất khi cúp điện giống như dữ liệu trên SRAM.
+Các cổng vào/ra
Các cổng kết nối của Arduino UNO
Arduino UNO có 14 chân digital dùng để đọc hoặc xuất tín hiệu. Chúng chỉ có 2 mức điện áp là 0V và 5V với dòng vào/ra tối đa trên mỗi chân là 40mA. Ở mỗi chân đều có các điện trở pull-up từ được cài đặt ngay trong vi điều khiển ATmega328 (mặc định thì các điện trở này không được kết nối).
Một số chân digital có các chức năng đặc biệt như sau:
2 chân Serial: 0 (RX) và 1 (TX): dùng để gửi (transmit – TX) và nhận (receive – RX) dữ liệu TTL Serial. Arduino Uno có thể giao tiếp với thiết bị khác thông qua 2 chân này. Kết nối bluetooth thường thấy nói nôm na chính là kết nối Serial không dây. Nếu không cần giao tiếp Serial, bạn không nên sử dụng 2 chân này nếu không cần thiết
Chân PWM (~): 3, 5, 6, 9, 10, và 11: cho phép bạn xuất ra xung PWM với độ phân giải 8bit (giá trị từ 0 → 28-1 tương ứng với 0V → 5V) bằng hàm analogWrite(). Nói một cách đơn giản, bạn có thể điều chỉnh được điện áp ra ở chân này từ mức 0V đến 5V thay vì chỉ cố định ở mức 0V và 5V như những chân khác.
Chân giao tiếp SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Ngoài các chức năng thông thường, 4 chân này còn dùng để truyền phát dữ liệu bằng giao thức SPI với các thiết bị khác.
LED 13: trên Arduino UNO có 1 đèn led màu cam (kí hiệu chữ L). Khi bấm nút Reset, bạn sẽ thấy đèn này nhấp nháy để báo hiệu. Nó được nối với chân số 13. Khi chân này được người dùng sử dụng, LED sẽ sáng.
Arduino UNO có 6 chân analog (A0 → A5) cung cấp độ phân giải tín hiệu 10bit (0 → 210-1) để đọc giá trị điện áp trong khoảng 0V → 5V. Với chân AREF trên board, bạn có thể để đưa vào điện áp tham chiếu khi sử dụng các chân analog. Tức là nếu bạn cấp điện áp 2.5V vào chân này thì bạn có thể dùng các chân analog để đo điện áp trong khoảng từ 0V → 2.5V với độ phân giải vẫn là 10bit.
Đặc biệt, Arduino UNO có 2 chân A4 (SDA) và A5 (SCL) hỗ trợ giao tiếp I2C/TWI với các thiết bị khác.
+Lập trình cho Arduino
Các thiết bị dựa trên nền tảng Arduino được lập trình bằng ngôn riêng. Ngôn ngữ này dựa trên ngôn ngữ Wiring được viết cho phần cứng nói chung. Và Wiring lại là một biến thể của C/C++. Một số người gọi nó là Wiring, một số khác thì gọi là C hay C/C++. Riêng mình thì gọi nó là “ngôn ngữ Arduino”, và đội ngũ phát triển Arduino cũng gọi như vậy. Ngôn ngữ Arduino bắt nguồn từ C/C++ phổ biến hiện nay do đó rất dễ học, dễ hiểu. Nếu học tốt chương trình Tin học 11 thì việc lập trình Arduino sẽ rất dễ thở đối với bạn.
Để lập trình cũng như gửi lệnh và nhận tín hiệu từ mạch Arduino, nhóm phát triển dự án này đã cũng cấp đến cho người dùng một môi trường lập trình Arduino được gọi là Arduino IDE (Intergrated Development Environment)
2)PIN mặt trời (Pin năng lượng mặt trời poly 1Wp 6V)
Trong phạm vi làm đồ bài tập đồ án, thiết kế mô hình mô phỏng và điều kiện không cho phép. Để phù hợp chúng em chỉ sử dụng PIN có công suất nhỏ.
Thông số kỹ thuật:
- Công suất P: 1W
- Điện áp danh định Vmp: 6V
- Dòng danh định Imp: 0-200mA
- Chuẩn loại Pin (cell): Pin Silic đa tinh thể (polycrystalline)
- Kích thước: 110 * 65 * 2.5mm
Hình pin năng lượng mặt trời poly 1w
Tấm pin năng lượng mặt trời 1W có điện áp ra là 6V, sử dụng để thực nghiệm điều hướng .
3)Mạch Giảm Áp LM2596
Là module giảm áp có khả năng điều chỉnh được dòng ra đến 3A. LM2596 là IC nguồn tích hợp đầy đủ bên trong. Tức là khi cấp nguồn 9v vào module, sau khi giảm áp ta có thể lấp được nguồn 3A < 9v...như 5V hay 3.3V
Thông số kỹ thuật
Module nguồn không sử dụng cách ly
Nguồn đầu vào từ 4V - 35V.
Nguồn đầu ra: 1V - 30V.
Dòng ra Max: 3A
Kích thước mạch: 53mm x 26mm
Đầu vào: INPUT +, INPUT-
Đầu ra: OUTPUT+, OUTPUT-
Hình Mạch Giảm Áp LM2596
+Cách sử dụng LM2596
Khá đơn giản, các bạn chỉ cần cấp nguồn thô vào chân INPUT+, INPUT- rồi nhận nguồn ra từ chân OUTPUT+, OUTPUT-
Hình Các chân Mạch Giảm Áp LM2596
Ta có thể chỉnh điện áp đầu ra bằng cách vặn cái biến trở trên module...rồi lấy đồng hồ đo điện áp đầu ra, hiệu chỉnh sao cho phù hợp.
4)Động cơ servo MG995
Động cơ servo bản chất là 1 động cơ DC thông thường nhưng được lắp them hệ thống bánh rang giúp làm giảm tốc độ vòng tua và tăng momen xoắn. Khác với các lại động cơ điện thông thường chỉ cần cấp nguồn là quay liên tục, Động Cơ Servo chỉ quay khi được điều khiển với góc quay nằm trong khoảng bất kì từ 0º đến 180º.
Hình Động cơ servo MG995
+Thông số kỹ thuật
-Chủng loại : Động cơ servo
· Kích thước : 40 x 19.9 x 43 mm
· Điện áp làm việc : 4.8 V - 7.2 V
· Góc quay Động cơ servo Futaba: 180độ
· Sức kéo tại áp 4.8V : 13kg/cm
· Sức kéo tại áp 6.0V : 15kg/cm
· Tốc độ vận hành 4.8V :0.17 sec / 60độ
· Tốc độ vận hành 6.0V :0.13 sec / 60độ
5)Quang trở 5mm:
Là điện trở có trị số càng giảm khi được chiếu sáng càng mạnh. Điện trở tối (khi không được chiếu sáng - ở trong bóng tối) thường trên 1M, trị số này giảm rất nhỏ có thể dưới 100 ôm khi được chiếu sáng mạnh
Hình Quang trở 5mm
Nguyên lý làm việc của quang điện trở là khi ánh sáng chiếu vào chất bán dẫn (có thể là Cadmium sulfide – CdS, Cadmium selenide – CdSe) làm phát sinh các điện tử tự do, tức sự dẫn điện tăng lên và làm giảm điện trở của chất bán dẫn. Các đặc tính điện và độ nhạy của quang điện trở dĩ nhiên tùy thuộc vào vật liệu dùng trong chế tạo.
Hình Nguyên lý làm việc của quang trở
- Vài ứng dụng của quang điện trở: Quang điện trở được dùng rất phổ biến trong các mạch điều khiển.
2.2 Hệ thống trục đở ,trục xoay
2.2.1Thiết kế ban đầu
-Để đảm bảo về phần thiết kế, ta nên xem xét khối lượng tấm pin, trục đỡ, ổ bi …Đây chỉ là mô hình thí nghiệm để hiểu rõ về tăng hiệu suất tấm pin ,không đặt ngoài trời, không có yếu tố thời tiết như mưa, nắng, gió, bão … vì vậy phải chọn chất xốp Fomex 10mm để làm khung xoay,giá đở.
-Sau khi nghiên cứu, khảo sát các kết cấu dàn tự xoay tấm pin thì đã cho ra được đề xuất mô hình như sau.
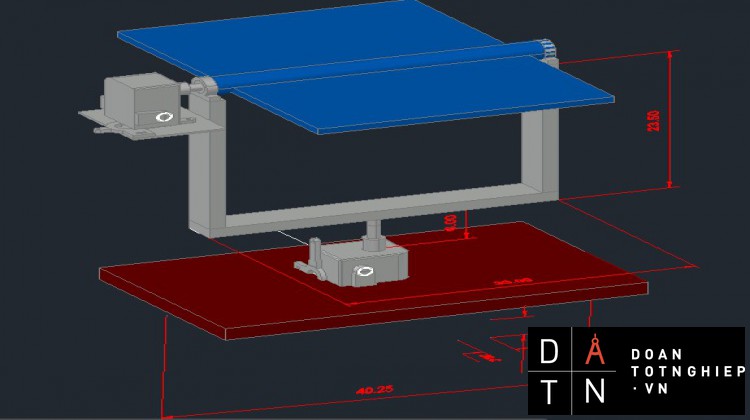
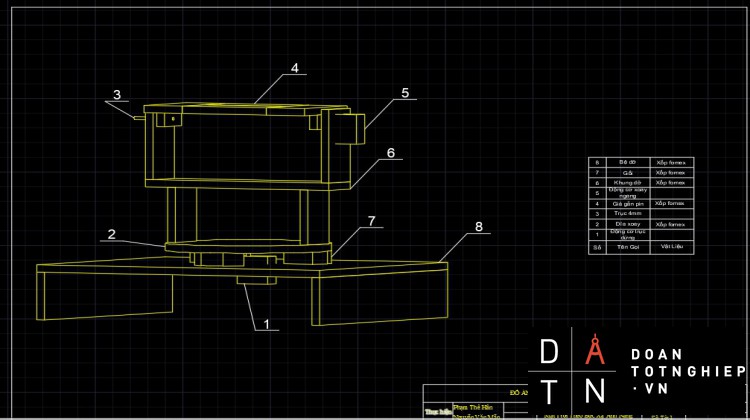
Mô hình cơ khí 3D được dựng trên phần mềm AUTOCAD MECHANICAL
2.2.2 Cấu tạo khung đỡ hai trục
Khung trục xoay dọc được lắp bằng xốp fomex 10mm được kết nối vào đế giàn khung ,khung xoay ngang được lắp trên đỉa xoay đứng nhằm thay đổi góc nhận ánh sáng mặt trời.
Khi động cơ quay trục xoay đứng sẽ xoay một góc phù hợp với điều kiện ánh sáng theo phương thẳng đứng và giữ cân bằng trục ngang.
-Phần đế chân được ghép với nhau từ các thanh xốp Fomex 10mm, dùng keo cốđịnhvớinhau,đảmbảochắcchắnchoquátrìnhvậnhành.Chiềudàithanhngang 400mm, 4 chân cao 150mm.
-Khung xoay đứng là 1 đĩa xoay hình tròn với đường kính 190mm có 3 gối đỡ kết dính phía
dưới đĩa lệch nhau 120 độ chống rung lắc.Đĩa xoay và khung gắn tấm pin đều được được gắn với cánh tay đòn của động cơ serrvo .
2.3 Thiết kế Mạch điều khiển.
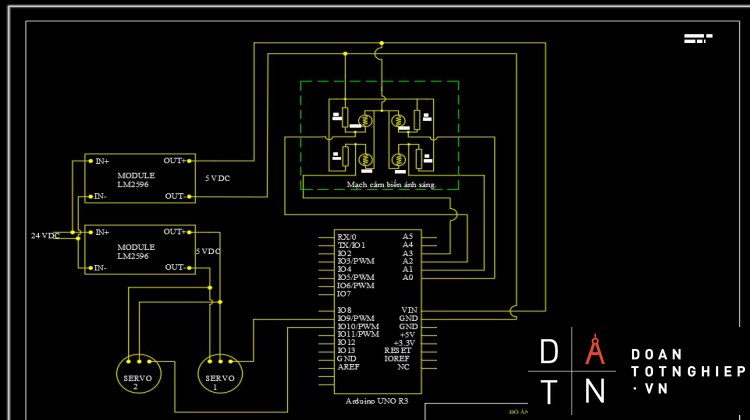
2.3.1 Mạch nguồn:
- Nguồn cấp 24vdc được cấp vào hai module giảm áp xuống 5vdc , 1 modul giảm áp cấp nguồn cho arduino và mạch cảm biến ánh sáng,modul còn lại cấp cho 2 động cơ serrvo.
2.3.2 Mạch cảm biến ánh sáng:
Dàn PIN mặt trời sẽ tự động quay theo mặt trời và luôn luôn vuông góc với mặt trời. Vì vậy tấm PIN của chúng ta sẽ thu được nhiều ánh sáng mặt trời hơn, tận dụng được tối đa nguồn ánh sáng ánh sáng mặt trời.
Hệ thống định hướng sử dụng 4 quang trở làm nhiệm vụ tiếp nhận ánh sáng từ nguồn sáng. Giữ các quang trở này được lắp 1 vách ngăn hình dấu “+” để phân chia 4 cảm biến quang trở thành 4 hướng khác biệt. Vách ngăn sẽ làm nhiệm vụ định hướng cho 4 quang trở luôn luôn hướng về nơi có nguồn sáng mạnh nhất ( Mặt Trời ). Khi giá trị của 4 quang trở bằng nhau thì cụm cảm biến này sẽ vuông góc với tia bức xạ của mặt trời.
Hình mô phỏng cảm biến ánh sáng.
Hình ảnh cảm biến thực tế
2.3.3 Mạch điều khiển động cơ
-Tín hiệu từ cụm cảm biến này sẽ được truyền về trung tâm điều khiển Arduino. Ở đây , Arduino sẽ tính toán bằng cách lấy giá trị trung bình của 2 cảm biến quang trở liền kề trừ đi giá trị trung bình của 2 cảm biến còn lại. Nếu kết quả của giá trị này lớn hơn 0 thì nó sẽ phát ra xung vuông cho động cơ servo quay theo 1 chiều ( và quay theo hướng ngước lại khi giá trị này nhỏ hơn 0). Nếu giá trị này bằng không thì sẽ ngưng cung cấp xung đến 2 động cơ khiến nó dừng quay và hệ thống giá đỡ pin sẽ giữ cho pin ở trang thái cố định.
-Mạch cảm biến được cấp nguồn giá trị điện áp ra từ các chân A1, A2, A3, A0 tương đương với cường độ ánh sáng rơi trên tường quang trở, từ đó arduino sẽ tính toán được góc nghiêng theo giá trị trả về phát xung điều khiển cho động cơ serrvo hoạt động cho phù hợp.Các chân băm xung cho serrvo là chân 9 arduino nối serrvo 1,chân 10 nối serrvo 2.
2.4 Xây dựng thuật toán và chương trình điều khiển
2.4.1 Lưu đồ thuật toán
Chú thích:
cbtt: Cảm biến phía trên bên trái
cbdp: Cảm biến phía dưới bên phải
cbtp: Cảm biến phía trên bên phải
cbdt: Cảm biến phía dưới bên trái
servo ngang: Động cơ xoay trục ngang
servo dọc: Động cơ xoay trục dọc
2.4.2 Code chương trình điều khiển trên arduino
#include
// 180 horizontal MAX
Servo horizontal; // horizontal servo
int servoh = 90; // 90; // stand horizontal servo
int servohLimitHigh = 170;
int servohLimitLow = 5;
Servo vertical; // vertical servo
int servov = 45; // 90; // stand vertical servo
int servovLimitHigh = 130;
int servovLimitLow = 5;
// LDR pin connections
// name = analogpin;
int ldrlt = A0; //LDR TREN BEN TRAI
int ldrrt = A1; //LDR TREN BEN PHAI
int ldrld = A2; //LDR DUOI BEN TRAI
int ldrrd = A3; //ldr DUOI BEN PHAI
void setup()
{ Serial.begin(9600);
// servo connections
// name.attacht(pin);
horizontal.attach(9);
vertical.attach(10);
horizontal.write(90);
vertical.write(45);
delay(3000);
}
void loop()
{ int lt = analogRead(ldrlt); // tren trai
int rt = analogRead(ldrrt); // tren phai
int ld = analogRead(ldrld); // duoi trai
int rd = analogRead(ldrrd); // duoi phai
// int dtime = analogRead(4)/20; // doc phan ap
// int tol = analogRead(5)/4;
int dtime = 10; int tol = 50;
int avt = (lt + rt) / 2; // gttb phia tren
int avd = (ld + rd) / 2; // gttb phia duoi
int avl = (lt + ld) / 2; // gttb ben trai
int avr = (rt + rd) / 2; // gttb ben phai
int dvert = avt - avd; // kiem tra su khac biet gttb cua len va xuong
int dhoriz = avl - avr;// kiem tra su khac biet gttb cua trai va phai
Serial.print(avt);
Serial.print(" ");
Serial.print(avd);
Serial.print(" ");
Serial.print(avl);
Serial.print(" ");
Serial.print(avr);
Serial.print(" ");
Serial.print(dtime);
Serial.print(" ");
Serial.print(tol);
Serial.println(" ");
if (-1*tol > dvert || dvert > tol) // kiem tra xem su khac biet co nam trong gia tri cho phep de thay doi goc doc
{
if (avt > avd)
{
servov = ++servov;
delay(100);
if (servov > servovLimitHigh)
{
servov = servovLimitHigh;
}
}
else if (avt < avd)
{
servov= --servov;
delay(100);
if (servov < servovLimitLow)
{
servov = servovLimitLow;
}
}
vertical.write(servov);
}
if (-1*tol > dhoriz || dhoriz > tol) // kiem tra xem su khac biet co nam trong gia tri cho phep de thay doi goc ngang
{
if (avl > avr)
{
servoh = --servoh;
delay(100);
if (servoh < servohLimitLow)
{
servoh = servohLimitLow;
}
}
else if (avl < avr)
{
servoh = ++servoh;
delay(100);
if (servoh > servohLimitHigh)
{
servoh = servohLimitHigh;
}
}
else if (avl = avr)
{
// nothing
}
horizontal.write(servoh);
}
delay(dtime);
}
2.5 Kết luận chương 2
Trong chương 2 của đề tài từ những cơ sở thiết kế và các phần giới thiệu đặc điểm thiết bị em đã lên danh sách thiết bị vật tư của mô hình và tính toán hệ truyền động theo đặc điểm thiết kế mô hình nhằm đáp ứng tính đồng bộ giữa các thiết vị trong hệ thống điều khiển.
Thiết kế sơ đồ khối của hệ thống và hướng phát triển điều hướng trong thời gian tới, tối ưu hoá hệ truyền động, tối ưu hoá hệ thống đo nhằm đẩy cao công suất điện tạo ra của mô hình.
Thiết kế lưu đồ thuật toán phù hợp với thực trạng điều khiển đáp ứng của mô hình trong quá trình thử nghiệm, viết chương trình cho module điều khiển arduino uno r3 gồm có bốn cảm biến đưa dữ liệu đầu vào bộ điều khiển để điều khiển thông qua hai động cơ servo thay đổi các trục của hệ thống.
CHƯƠNG III:THỰC NGHIỆM MÔ HÌNH, KẾT LUẬN, HƯỚNG PHÁT TRIỂN
3.1Thực nghiệm môhình.
Sau khi hoàn thành mô hình, ta tiến hành thực nghiệm mô hình ở các điều kiện khác nhau nhằm mục đích kiểm tra xem mô hình hoạt động có hiệu quả hay không? Đồng thời so sánh giữa công suất của tấm pin khi được điều hướng theo vị trí của Mặt Trời và khi tấm pin có góc nghiêng cố định tại một vị trí..
Mô hình pin mặt trời thựcnghiệm.
3.2Thực nghiệm với điều kiện ban ngày
Ta thực nghiệm với tải định mức của tấm pin .
Ta có
Vậy tải định mức của tấm pin :
Khi thực nghiệm mô hình ở chế độ tự động điều hướng pin mặt trời theo hướng của ánh sáng mặt trời, ta không cần quan tâm đến vị trí hướng của mặt phẳng tấm pin.
Khi thực nghiệm với tấm pin đặt cố định một góc nghiêng ban đầu và mặt phẳng của tấm pin chỉ hướng về một phía,mặt phẳng đón ánh sáng mặt trời của tấm pin sẽ quay về hướng Nam.
Ta tiến hành thực nghiệm,vào lúc 14h30 ngày 26 tháng 11 năm 2022,Trời lúc này khí hậu mát mẻ ,trời nắng nhẹ.Xoay hệ thống sao cho tâm pin nghiên hướng nam ,lúc này điện áp hiển thị là 2,5V.
Suy ra công suất tâm pin lúc này đạt được là :
Điện áp tấm pin khi cố định.
+ Sau đó ta bật chế độ tự động điều hướng thì điện áp tấm pin đo được lúc này
4,6V.
Suy ra công suất tâm pin lúc này đạt được là :
Điện áp tấm pin khi điều hướng.
Kết luận:Với kết quả thu được, có thể thấy mô hình với khi tự động điều hướng hai trục xoay thì tấm pin năng lượng mặt trời có công suất cao hơn với so với tấm pin cố định khi được đặt cố định.
CHƯƠNG IV:KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
4.1Ưu, nhược điểm của mô hình.
Trong quá trình vận hành thì có thể nhận thấy được một số ưu, nhược điểm của mô hình, để từ đó phát huy các ưu điểm, hạn chế và khác phục các nhược điểm để mô hình được hoàn thiện, vận hành được tốt hơn.
|
Ưu điểm |
Nhược điểm |
|
Công suất của tấm pin khi được tự động điều hướng cao hơn khi đặt cố định. Không cần tính toán góc nghiêng mặt phẳng tấm pin so với mặt phẳngngang banđầu. Vận tốc quay phùhợp |
-Hệ thống vận hành chưa êm, còngây tiếngồn -Trong quá trình vận hành còn có sự dao động khungđỡ. -Thời gian phản hồi từ tín hiệu điều khiển đến động cơ chưa thực sựnhanh. -Tiếu tốn năng lượng nhiều hơn đặttấm pin cốđịnh -Hệ thống điều khiển còn nhiều thiếu sót và rời rạc chỉ tập trung vào điều hướng . -Khả năng chịu nhiệt độ cao thấp nên dễ gây ra tình trạng hỏng linh kiện, cần có biện pháp bảo vệ. -Hiệu suất của mạch điều khiển còn hạn chế.
|
Ưu nhược điểm hệ thống.
4.2 Hướng phát triển đề tài
-Do thời gian thực hiện có hạn và lượng kiến thức cá nhân là nhất định nên đề tài thực hiện xong chỉ đáp ứng được một phần nhỏ của một hệ thống hoàn chỉnh. Vì vậy, để được phong phú hơn, mang nhiều tính thực tế hơn nữa, có khả năng ứng dụng cao hơn thì em đề xuất đưa thêm vào những yêu cầu như sau:
-Thiết kế bộ truyền động để gia tăng sức mạnh của động cơ.
-Thêm một vài chức năng khác như tự điều chỉnh tốc độ, kết hợp cùng với bộ điều khiển sạc PMW, bộ nạp MPPT.
-Sử dụng thêm thời gian thực để hỗ trợ cho hệ thống cảm biến.
-Nghiên cứu kết hợp với bộ tự động chọn điểm làm việc cực đại của pin mặt trời bằng xử lý ảnh, thay đổi hình thức tải tiêu thụ tiến đến mô hình điện mặt trời kết hợp nối lưới.
-Sử dụng thêm các module kiểm soát công suất có khả năng kết nối vạn vật IOT (Internet Of things) để giúp con người có thể kiểm soát được tình trạng hoạt động ngay cả khi không có nhà.
-Hy vọng với những hướng phát triển nêu trên cùng với những ý tưởng, góp ý khác của quý thầy cô giáo em sẽ khắc phục những hạn chế, tồn tại của nó, làm cho đề tài này trở nên phong phú hơn, mang tính ứng dụng cao hơn vào trong thực tế cuộc sống, phục vụ cho những lợi ích trong tương lai.




