Đồ án môn học tổng hợp hệ điện cơ THIẾT KẾ HỆ THỐNG TRUYỀN ĐỘNG CHO MÁY MÀI
NỘI DUNG ĐỒ ÁN
Đồ án môn học tổng hợp hệ điện cơ THIẾT KẾ HỆ THỐNG TRUYỀN ĐỘNG CHO MÁY MÀI, thuyết minh ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ MÁY MÀI, bộ điều khiển lập trình MÁY MÀI, Ngôn ngữ lập trình MÁY MÀI,
Phần thứ nhất
PHÂN TÍCH CHỌN PHƯƠNG ÁN TRUYỀN ĐỘNG
Đặc trưng cho công nghệ gia công chi tiết bằng phương pháp mài có yêu cầu rất cao về độ chính xác kích thước, độ nhẵn bề mặt. Khi gia công các chi tiết khác nhau đòi hỏi phải có tốc độ khác nhau.Việc điều chỉnh tốc độ hay đảm bảo tốc độ của máy sẽ đảm bảo chất lượng sản phẩm và an toàn trong sản xuất, đạt năng suất cao ..... Do vậy đa số các máy trong quá trình gia công kim loại đòi hỏi phải điều chỉnh tốc độ.
Đối với máy mài vì nó là khâu thực hiện nguyên công cuối cùng nên đòi hỏi độ chính xác và độ bóng cao nên viẹc điều chỉnh tốc độ cũngđòi hỏi cao.Ở máy mài việc thực hiện điều chỉnh tốc độ quay chi tiết gia công đó là yêu cầu không thể thiếu và hết sức quan trọng trong khi thiết kế cũng như vận hành.
I. CHỌN ĐỘNG CƠ
Trước khi đi chọn động cơ ta đi phân tích 2 loại động cơ thông dụng :
+ Động cơ điện xoay chiều :
+ Động cơ điện 1 chiều :
1. Động cơ điện xoay chiều
a. Động cơ không đồng bộ
Hình2 Sơ đồ nguyên lý động cơ không đồng bộ
Hình 3 Đặc tính cơ của động cơ không đồng bộ =f(M) trong chế độ động cơ
Động cơ không đồng bộ 3 pha được sử dụng rộng rãi trong công nghiệp từ công suất nhỏ đến công suất trung bình và chiếm tỉ lệ rất lớn so với động cơ khác. Sở dĩ như vậy : là do động cơ không đồng bộ có kết cấu đơn giản, dễ chế tạo, vật hành an toàn, sử dụng nguồn cấp trực tiếp từ lưới điện xoay chiều 3 pha ( Hình 2).
............................................................
Tuy nhiên nhược điểm của loại động cơ này là điều chỉnh tốc độ và khống chế các quá trình quá độ gặp khó khăn, mômen khởi động nhỏ, dòng khởi động lớn. Mặt khác do đặc tính cơ có dạng đường cong (Hình 3) nên việc ổn định tốc độ gặp khó khăn. Nếu tuyến tính hoá đoạn đặc tính làm việc thì chỉ có thể ổn định tốc độ ở điểm làm việc từ 0 đến điểm A trên hình vẽ. Còn từ điểm A đến Mkđ là đoạn đặc tính làm việc không ổn định của động cơ.
Trong thời gian gần đây, do sự phát triển của công nghiệp chế tạo bán dẫn công suất và kỹ thuật điện tử - tin học, động cơ không đồng bộ đã khai thác được các ưu điểm của nó và trở thành hệ truyền động có khả năng cạnh tranh có hiệu quả với hệ truyền động Tiristor - động cơ một chiều. Tuy nhiên việc ứng dụng các kỹ thuật mới này còn rất hạn chế ở nước ta do giá thành còn cao.
b. Động cơ đồng bộ
Động cơ đồng bộ 3 pha trước đây thường dùng cho loại truyền động không điều chỉnh tốc độ , công suất trung bình và lớn ( hàng trăm KW đến hàng MW ) , có yêu cầu ổn định tốc độ cao.
Ngày nay do sự phát triển mạnh mẽ của công nghiệp điện tử, động cơ đồng bộ được nghiên cứu ứng dụng nhiều trong công nghiệp, ở mọi loại giải công suất, từ vài trăm W ( cơ cấu ăn dao máy cắt gọt kim loại, cơ cấu truyền động của tay máy, người máy v.v... ) đến hàng MW ( trong truyền động kéo tàu GTV tốc độ cao, máy cán v.v... ).
Nhận xét:
Ưu điểm của loại động cơ này là có độ ổn định tốc độ cao ( đặc tính cơ tuyệt đối cứng ở vùng mômen cho phép M Mmax ), hệ số cos và hiệu suất lớn , vận hành có độ tin cậy cao.
Nhược điểm của loại động cơ này là việc động cơ tốc độ gặp khó khăn do chỉ có phương pháp duy nhất là biến tần nguồn điện. Tuy nhiên, do sự phát triển mạnh mẽ của kỹ thuật điện tử thì nhược điểm này đã được khắc phục bằng các bộ biến tần công nghiệp của các hãng sản xuất thiết bị điện tử công nghiệp nổi tiếng trên thế giới như SIEMENT ( Đức ) , OMRON (Pháp) v.v... nhưng do giá thành còn cao cũng như công nghệ truyền thống nên chúng chưa được sử dụng rộng rãi ở nước ta.
2. Động cơ điện một chiều
Động cơ điện một chiều do có hai cách mắc cuộn kích từ (mắc nối tiếp và mắc song song) nên chúng được chia làm hai loại động cơ : động cơ điện một chiều kích từ nối tiếp và động cơ điện một chiều kích từ song song. Ta xét đặc tính của từng loại động cơ một.
Hình 4.a) Sơ đồ nguyên lý động cơ điện một chiều kích từ nối tiếp
a. Động cơ điện một chiều kích từ nối tiếp
Đặc điểm của động cơ một chiều kích từ nối tiếp là cuộn kích từ mắc nối tiếp với cuộn dây phần ứng (hình 4.a) , nên cuộn kích từ có tiết diện lớn, điện trở nhỏ , số vòng ít, chế tạo dễ dàng.
Phương trình đặc tính cơ:
..........................................................
Nhận xét:
Dạng đặc tính cơ biểu diễn trên hình vẽ .Ta thấy đặc tính có dạng hypenbol và rất mềm ở phạm vi dòng điện có giá trị nhỏ hơn định mức. Ở vùng dòng điện lớn, do mạch từ bão hoà nên từ thông hầu như không thay đổi và đạc tính có dạng gần tuyến tính . Hơn nữa đặc tính cơ của động cơ 1 chiều kích từ nối tiếp có độ cứng thay đổi theo phụ tải , do đó thông qua tốc độ của động cơ ta có thể biết được sự thay đổi của phụ tải . Vì vậy ta không nên sử dụng động cơ này cho những truyền động có yêu cầu ổn định cao mà nên sử dụng cho những truyền động có yêu cầu tốc độ thay đổi theo tải .
Vậy ta không thể dùng động cơ 1 chiều kích từ nối tiếp cho công nghệ mài .
b. Động cơ điện một chiều kích từ độc lập
a) b)
Hình 6.a) Sơ đồ nguyên lý động cơ điện một chiều kích từ nối tiếp. b) Đặc tính cơ của một động cơ điện một chiều kích từ nối tiếp
Động cơ điện một chiều kích từ độc lập thường có cuộn kích từ mắc vào nguồn một chiều độc lập (hình 6.a) (đối nguồn có công suất không đủ lớn) và cũng có thể cuộn kích từ mắc song song với mạch phần ứng (đối nguồn một chiều có công suất vô cùng lớn).
Phương trình đặc tính cơ:
Nhận xét:
So với động cơ điện 1 chiều kích từ nối tiếp thì ta thấy động cơ điện 1 chiều kích từ độc lập có từ thông không phụ thuộc vào phụ tải mà chỉ phụ thuộc vào điện áp và điện trở của mạch kích từ nên khẳ năng ổn định tốc độ của động cơ điện 1 chiều kích từ độc lập cao hơn. Mặt khác đặc tính cơ của nó có dạng đường thẳng do đó có thể ổn định ở mọi cấp tốc độ. Động cơ loại này có dải điều chỉnh rộng do :
M = kI; = const; M = const
Kết luận:
Xét về công nghệ và các nhận xét ở trên thì động cơ một chiều kích từ độc lập rất phù hợp với yêu cầu kinh tế cà kỹ thuật. Do vậy em đã chọn loại động cơ này.
II. CHỌN PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ
(Với động cơ 1 chiều kích từ độc lập )
Từ phương trình đặc tính cơ:
n =
ta thấy có 3 phương pháp điều chỉnh tốc độ :
+ Điều chỉnh bằng phương pháp thay đổi điện trở phụ mạch phần ứng động cơ.
+ Điều chỉnh bằng phương pháp thay đổi từ thông.
+ Điều chỉnh bằng phương pháp thay đổi điện ápđạt vào phần ứng động cơ.
1. Điều chỉnh điện trở phụ mạch phần ứng động cơ
Muốn thay đổi điện trở mạch phần ứng ta nối thêm điện trở phụ Rf vào mạch phần ứng.
Tốc độ không tải lý tưởng:
Độ cứng đặc tính cơ:
Hình 7. Các đặc tính của động cơ một chiều kích từ độc lập khi thay đổi điện trở phụ mạch phần ứng
Nhận xét:
Khi thêm điện trở phụ vào mạch mạch phần ứng thì độ cứng đặc tính cơ giảm đi. Với một phụ tải Mc nào đó, nếu Rf càng lớn thì tốc độ động cơ giảm, đồng thời dòng điện ngắn mạch và mômen ngắn mạch cũng giảm (hình 7). Như vậy phương pháp này không thể ổn định tốc độ cho toàn dải điều chỉnh.
2. Điều chỉnh từ thông
Khi điều chỉnh từ thông:
Tốc độ không tải lý tưởng:
Độ cứng đặc tính cơ:
...................................................
III. CHỌN BỘ BIẾN ĐỔI ĐỂ CẤP ĐIỆN ÁP CHO PHẦN ỨNG ĐỘNG CƠ
Về phương diện điều chỉnh tốc độ, động cơ điện một chiều có nhiều ưu việt hơn so với loại động khác, không những nó có khả năng điều chỉnh tốc độ dễ dàng mà cấu trúc mạnh động lực, mạch điều khiển đơn giản hơn đồng thời lại đạt chất lượng cao trong dải điều chỉnh rộng.
Có hai phương pháp cơ bản điều chỉnh tốc độ động cơ một chiều
-Điều chỉnh điện áp cấp cho phần ứng động cơ.
-Điều chỉnh điện áp cấp cho mạch kích từ động cơ.
Trong công nghiệp sử dụng bốn loại bộ biến đổi chính:
-Bộ biến đổi máy điện: động cơ sơ cấp kéo máy phát một chiều.
-Bộ biến đổi điện từ: khuyếch đại từ.
-Bộ biến đổi chỉnh lưu bán dẫn: chỉnh lưu Tiristor.
-Bộ biến đổi xung áp một chiều:Tiristor-Tranzitor.
Và tương ứng với bốn bộ biến đổi trên có bốn loại truyền động. Trong đồ án này em chỉ xét 2 loại truyền động là:
Hệ truyền động máy phát động-động cơ và hệ truyền động chỉnh lưu động cơ.
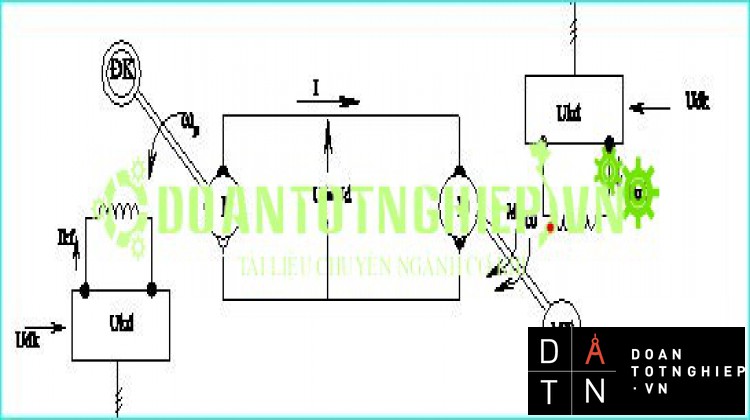
1. Hệ truyền động máy phát động-động cơ (F-Đ)
-Cấu trúc hệ F-Đ và các đặc tính cơ bản.
Hệ thống máy phát-động cơ là hệ truyền động điện mà bộ biến đổi là máy phát điện một chiều kích từ độc lập. Máy phát này thường do động cơ sơ cấp không đồng bộ 3 pha điều khiển quay và coi tốc độ quay của máy phát là không đổi.









