ĐỒ ÁN THIẾT KẾ PHÁT TRIỂN MẪU ROBOT LEO CẦU THANG VÀ QUAN SÁT TRONG NHÀ

NỘI DUNG ĐỒ ÁN
MỞ ĐẦU ROBOT LEO CẦU THANG
Việc ứng dụng các loại rô bốt khác nhau nhằm phục vụ con người trong sản xuất và sinh hoạt đang ngày càng thu hút sự quan tâm nghiên cứu của nhiều nước trên thế giới. Bên cạnh việc tăng năng suất lao động, tăng độ chính xác và ổn định chất lượng của sản phẩm, Robot còn đóng vai trò quan trọng trong việc thay thế con người làm việc nhà,... Hơn nữa Robot còn làm việc ở những nơi mà con người không thể thực hiện hoặc có thể nguy hại đến sức khỏe của con người như: môi trường độc hại, cách li, ô nhiễm, phóng xạ hạt nhân,...Trước tình hình đó, việc nghiên cứu chế tạo mẫu Robot có khả năng quan sát và có khả năng di chuyển linh hoạt trong nhà, có cơ cấu thao tác có thể giúp con người thực hiện một số công việc nào đó, đặc biệt là trong môi trường độc hại, tác chiến trong quân sự, là nhu cầu đang được đặt ra.
Với sự hướng dẫn tận tình của thầy: …………….., chúng em đã tiến hành nghiên cứu, khảo sát, tính toán, thiết kế và chế tạo một mẫu Robot quan sát trong nhà đơn giản có khả năng di chuyển linh họat và đặc biệt có thể leo lên cầu thang của ngôi nhà, quan sát không gian trong nhà nhờ hệ thống Camera, hình ảnh từ Camera được truyền về máy tính điều khiển trung tâm. Sự hoạt động của toàn bộ hệ thống rôbốt được thực hiện nhờ kỹ thuật vi điều khiển thông qua hệ thống kết nối bằng sóng radio từ Robot đến máy tính. Việc điều khiển Robot được thực hiện bằng các chương trình lập sẵn hoặc kết hợp chương trình lập sẵn với sự can thiệp của con người.
Nội dung của đồ án được bố cục như sau:
Phần mở đầu giới thiệu về đồ án, tính cấp thiết của đồ án, phạm vi nghiên cứu và phương pháp nghiên cứu đồ án.
Chương 1: Tổng quan về Robot di động, Robot di động trong nhà
Nội dung của chương này trình bày về các khái niệm Robot di động nói chung và Robot di động trong nhà nói riêng, phân loại Robot di động trong nhà, đặc điểm thiết kế, các vấn đê thiết kế Robot di động trong nhà đang được quan tâm hiện nay.
Chương 2: Thiết kế tổng thể và thiết kế cơ khí
Nội dung của chương này tập trung đi sâu vào khảo sát, phân tích chức năng, lựa chọn cấu trúc, nguyên lý, tính toán thiết kế tổng thể hệ thống cơ khí và mô phỏng lắp ráp, tính toán lựa chọn các chi tiết cơ tiêu chuẩn cũng như các chi tiết phi tiêu chuẩn.
Chương 3: Thiết kế bộ điều khiển
Nội dung của chương này đi vào nghiên cứu, khảo sát chức năng của Robot để đưa ra nguyên lý điều khiển và giải pháp điều chỉnh cơ cấu dẫn động, từ đó đưa ra sơ đồ chức năng, sơ đồ nguyên lý mạch điều khiển, qua đó lập trình điều khiển Robot.
Chương 4: Chế tạo và thử nghiệm
Chương này tập trung gia công cơ khí, lắp ráp các chi tiết sau khi gia công, hoàn chỉnh hệ thống cơ khí cho Robot, lắp mạch điều khiển, vận hành thử nghiệm.
CHƯƠNG 1: TỔNG QUAN VỀ ROBOT DI ĐỘNG TRONG NHÀ
1.1. Các khái niệm về Robot di động, Robot di động trong nhà
Robot di động ngày nay đã và đang được nghiên cứu và ứng dụng rất rộng rãi trên thế giới, chúng được sử dụng trong những môi trường độc hại hay những dây chuyền sản suất linh hoạt FMS (Flexible Manufacturing System), cung cấp phôi, dụng cụ cho các trung tâm gia công,...
Trong các nhà máy hiện đại, phương tiện dẫn đường tự động AGV (Automatic Guided Vehicles) đã trở nên phổ biến. Loại đơn giản là những chiếc xe vận chuyển trong nội bộ phân xưởng được điều khiển theo chương trình với một quỹ đạo định sẵn. Đây là một loại Robot trong nhà điển hình.
1.2. Phân loại Robot di động trong nhà
Có rất nhiều cách phân loại Robot di động trong nhà, sau đây là một vài nguyên tắc phân loại thông dụng:
1.2.1. Phân loại theo cấu trúc cơ cấu vận động
Phương pháp phân loại này dựa trên phương thức di chuyển Robot của cơ cấu vận động:
- Robot di chuyển dạng bánh xe.
- Robot di chuyển dạng bánh xích.
1.2.2. Phân loại theo phương pháp điều khiển
Theo tiêu chí về phương pháp điều khiển, Robot di động trong nhà có thể được phân thành các loại sau:
- Robot điều khiển bằng tay nối dây.
- Robot điều khiển bằng tay từ máy tính.
1.2.3. Phân loại theo hệ thống năng lượng
- Hệ năng lượng điện: Thường dùng động cơ một chiều hay động cơ bước. Đặc tính của hệ năng lượng này là hoạt động chính xác tin cậy, đạt công suất khá, có tính tuyến tính cao, dễ điều khiển. Hệ năng lượng điện cũng đảm bảo được vệ sinh môi trường, kết cấu gọn, dẫn truyền năng lượng đơn giản.
- Hệ năng lượng thủy lực: Với hệ thuỷ lực có thể đạt tới công suất cao, đáp ứng với những điều kiện làm việc nặng. Tuy nhiên hệ thống thuỷ lực thường cồng kềnh do kết cấu bể dầu van lọc, hệ thống dẫn ngược,… Hệ khí nén có kết cấu gọn nhẹ hơn do không cần dẫn ngược nhưng lại phải gắn liền với một trung tâm tạo ra khí nén.
1.3. Đặc điểm thiết kế, chế tạo một số mẫu Robot đã có
1.3.1. Robot giúp làm việc nhà
Để giúp con người làm việc nhà các nhà khoa học Nhật Bản đã làm ra một loại robot mang tên SmartPal V, những robot này có thể thu dọn đồ chơi, xếp ngăn nắp trên giá đựng, hút bụi, làm sạch sàn nhà. SmartPal V không phải là loại robot mới. SmartPal V được thiết kế từ tháng 11 năm 2007 và đó là thế hệ thứ 5.
1.3.2. Robot lau nhà tự động
Robot lau nhà tự động với kiểu dáng thân thiện, tự động lau sạch sàn nhà trên mọi bề mặt chất liệu như sàn gỗ, gạch men, sơn, thảm,... theo chương trỡnh đó được cài đặt sẵn, với tính năng vượt trội kết hợp giữa hút bụi bẩn, quét và lau sạch những bụi bẩn trên sàn nhà. Robot có thể hút và lau tới 99,8% diện tích sàn nhà.
- Vách ngăn gắn cảm ứng giúp cho Robot tránh không bị rơi xuống bậc cầu thang.
- Bao gồm 3 mức cài đặt sẵn thời gian hoạt động, lựa chọn 20/40/60 phút.
- Dễ dàng tháo hộp đựng rác để vệ sinh sau mỗi khi lau xong nhà.
- Bộ pin sạc Ni-CD.
- Bộ điều khiển từ xa giúp người sủ dụng có thể điều khiển hoạt động của Robot theo ý muốn và có thể dừng Robot tại bất kỳ khi nào bạn muốn khi máy đang hoạt động.
1.3.3. ROBOT RC Stairclimbing
Đây là một loại robot di động có trang bi hệ thống camera quan sát, ảnh thu được được truyền về trung tâm tổng hợp dữ liệu, Robot được điều khiển từ xa bằng sóng radio ở tấn số cao, dữ liệu truyền đi từ bàn phím điều khiển được mó húa trước khi gửi di từ bộ điều khiển.
CHƯƠNG 2: THIẾT KẾ TỔNG THỂ VÀ THIẾT KẾ CƠ KHÍ
2.1. Phân tích yêu cầu, chức năng của Robot
Yêu cầu trước tiên của bất kì loại Robot di động nào cũng được nhắc đến đó là khả năng di chuyển, đặc trưng cho khả năng di chuyển là: Khả năng vượt chướng ngại vật, độ chính xác của dich chuyển, di chuyển được nhiều loại địa hình, thay đổi được hướng di chuyển dễ dàng, leo được cầu thang.
2.2. Lựa chọn cấu trúc, nguyên lý, thiết kế tổng thể
2.2.1. Giải pháp tổng thể về cấu trúc
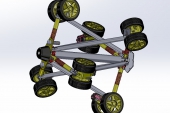
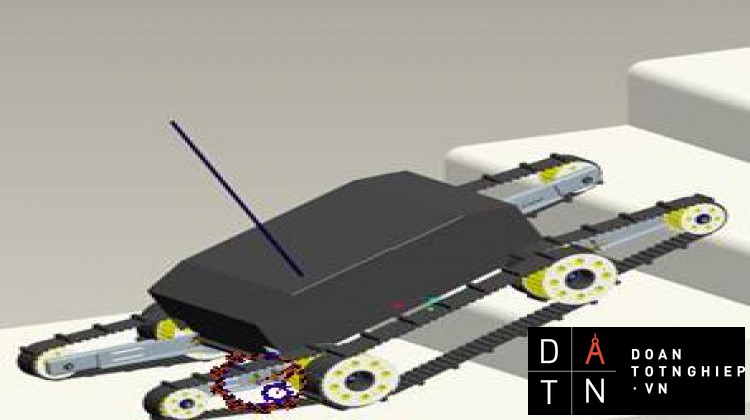
Để đảm bảo được khả năng di chuyển linh hoạt của Robot, khả năng vượt chướng ngại vật, leo cầu thang, thay đổi hướng được dễ dàng. Trong quá trình làm đồ án chúng em đã khảo sát một số mô hình di động như: Mô hình di động bằng bánh, bánh xích, di động bằng chân.
Với mô hình Robot như hình trên thì việc Robot có thể leo lên cầu thang hay không hoàn toàn phụ thuộc vào ma sát của đai và bề mặt của cầu thang, với kết cấu này việc di chuyển trong các địa hình phức tạp là tương đối tốt, ít gây ồn. Với cơ cấu chuyển động đai cho phép Robot di chuyển trên nền nhà tốt, được lắp thêm cơ cấu càng để khi gặp cầu thang thì ở những bậc đầu tiên càng sẽ nâng một phần thân xe nên khỏi mặt đất cho tới khi càng và thân tạo với nhau thành một đường thẳng, khi đó dưới sự hỗ trợ của ma sát thì Robot leo cầu thang như đi trên mặt phẳng.
2.2.2. Giải pháp điều khiển hệ thống, truyền thông
Để điều khiển hoạt động của Robot chúng em sử dụng vi điều khiển, để giao tiếp giữa máy tính và Robot chúng em sử dụng giao tiếp không dây, trong đồ án chúng em sử dụng vi điều khiển Pic16f877A của Microchip, bộ truyền thông không dây RF WD871.
Hoạt động chủ yếu của Robot là di chuyển linh hoạt, leo cầu thang, tránh vật cản. Do đó điều khiển vận tốc di chuyển của Robot chúng em sử dụng phương pháp biến đổi DC - DC băm xung PWM, khi rẽ chúng em sử dụng phương pháp cho hai bánh quay ngược chiều nhau
2.3. Thiết kế tổng thể và thiết kế chi tiết
2.3.1. Thiết kế mô hình Robot
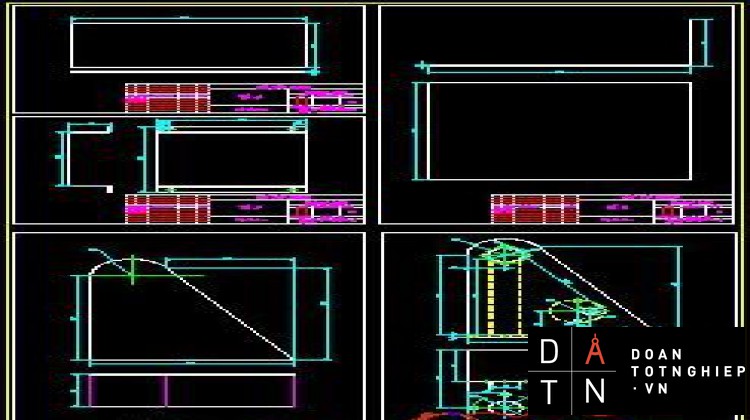
Qua quá trình khảo sát một số loại cầu thang khác nhau, chúng em nhận thấy kích thước của đa số các cầu thang là khác nhau. Tuy nhiên sự khác nhau đó không qua lớn, qua phân tích một số loại cầu thang chung em nhận thấy thông thường bậc cầu thang không quá 20 cm, rộng từ 25 cm đến 40 cm.
2.3.2. Lựa chọn động cơ điện một chiều
Các lực tác dụng lên chân gồm:
- Trọng lực P, [N];
- Phản lực N, [N];
- Lực ma sát Fms, [N];
- Lực phát động của động cơ F, [N];
Để đảm bảo trong trường hợp bất lợi, trong địa hình xấu, trong khi leo cầu thang, nên ta chọn loại động cơ có chỉ số sau:
Công suất: P= 40-50[W]
Số vòng quay: n =1100[vòng/ phút]
Công suất động cơ: P = 126.0,2 = 25,2 [W] < 45 [W]
Như vậy với động cơ đã chọn đủ an toàn để sử dụng cho robot
2.3.3. Tính chọn bộ truyền động đai
Hiện nay trên thị trường có những loại đai sau: Đai da, đai vải cao su, đai vải bông, đai sợi len, đai sợi tổng hợp. Đai da có độ bền mòn cao, chịu va đập tốt, nhưng không dùng được ở nơi có điều kiện ẩm ướt, axit, giá thành đắt nên ít được dùng. Đai vải cao su gồm nhiều lớp vải bông và cao su được sunfat hóa , được xếp thành từng vòng kín, cuộn xoắn ốc.
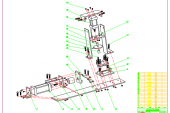
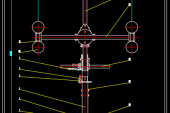
2.3.4 Thiết kế chi tiết
Thiết kế chi tiết trong đồ án chúng em sử dụng phần mềm ProE để thiết kế chi tiết tiêu chuẩn cũng như phi tiêu chuẩn. Các bản vẽ chi tiết được trình bày trong tập bản vẽ thiết kế các chi tiết của Robot.
2.4. Phân tích động học
Ta xét trường hợp chung của Robot khi chuyển lên dốc, có các lực được biểu diễn trên (hình 2.14). Robot sẽ được coi là chuyển động với gia tốc a nào đó, lực ma sát Fms, trọng lực, lực kéo của các động cơ, lực cản không khí bỏ qua.
2.4.1 Xác định tham số dịch chuyển của Robot
Các thông số ban đầu đã biết:
igt: Tỷ số truyền của hộp giảm tốc.
n: Tốc độ động cơ (vòng/phút).
ix: Tỷ số truyền của bộ truyền xích.
R[m]: Bán kính bánh dẫn động.
Cảm biến vận tốc được gắn ở đầu ra của hộp giảm tốc.
Góc xoay, khoảng cách dịch chuyển của Robot sẽ được máy tính tính toán và gửi xuống Robot, MCU sẽ nhận giá trị từ cảm biến vận tốc để tính toán xử lý tiếp để đưa các tham số về tốc độ, số vòng quay của động cơ.
Khi ta kích chọn một điểm thứ 3 có tọa độ Ai+1(xi+1,yi+1), khi đó ta hoàn toàn xác định điểm đó ở miền nào của đường thẳng đó, có dạng y - ax - b = 0, bằng cách thay tọa độ điểm đó vào phương trình đường thẳng trước đó và ta được một phương trình mới có dạng: y - ax - b = c, kiểm tra xem nếu c > 0 thì điểm thứ 3 đó nằm trên đường thẳng đó, ngược lại c < 0 thì điểm đó nằm dưới đường thẳng đó, nếu c = 0 thì điểm đó nằm trên đường thẳng đó.
CHƯƠNG 3: THIẾT KẾ BỘ ĐIỀU KHIỂN
3.1. Phân tích yêu cầu chức năng của bộ điều khiển
Xuất phát từ yêu cầu, chức năng, nhiệm vụ của đề tài, một số yêu cầu của Robot di động trong nhà mà chức năng bộ điều khiển của Robot chủ yếu là: Kết nối Robot với máy tính, đưa ra các tín hiệu điều khiển các khâu chấp hành, ngoài ra kết nối với một số cảm biến để lấy thông tin điều khiển phản hồi.
3.2 Phân tích lựa chọn nguyên lý điều khiển Robot
Nhìn vào sơ đồ hình 3.1 ta thấy bộ điều khiển gồm 7 khối chức năng đó là:
- Khối quan sát: khối này có chức năng thu nhận hình ảnh thu được từ Robot và sau đó được truyền về máy tính trung tâm để từ đó người điều khiển có thể quan sát được quá trình di chuyển của Robot và một số thông tin khác về không gian xung quanh Robot.
- Khối PC: khối này là một máy tính thông dụng, được kết nối với Robot nhờ quá trình truyền nhận dữ liệu qua sóng Radio qua Modul RF, nó còn có chức năng điều khiển quá trình chuyển động của Robot, thu nhận ảnh từ Robot.
3.3. Thiết kế sơ đồ chức năng, lựa chọn linh kiện, thiết kế sơ đồ nguyên lý, mô phỏng
Căn cứ vào vào nhiệm vụ, chức năng của robot thỡ bộ điều khiển cú những khối chức năng chính như sau:
3.3.1. Khối cung cấp nguồn
Khối nguồn nuụi cú chức năng chính là cung cấp những điện ỏp phự hợp cho cỏc linh kiện thiết bị trờn mạch điêu khiển, ngoài ra nú cũn chống chập chỏy, chống quỏ tải, ổn ỏp.
3.3.2. Khối công suất
Khối này cú chức năng nối tớn hiệu điều khiển từ MCU đến động cơ chấp hành.
Khối cụng suất phải đảm bảo tớnh ổn định cao, điều khiển dễ dàng, tin cậy, phải cỏch ly phần cụng suất với phần điều khiển, đảm bảo cung cấp đủ cụng suất cho động cơ. Khi ở trạng thái ban đầu mạch chưa làm việc thỡ điện ỏp tại hai chân điều khiển C1 và C2 ở mức điện ỏp cao ( mức ~5V) mạch hoạt động khi chân điều khiển C1 hoặc C2 ở mức điện ỏp thấp ( mức 0V).
3.3.5. Khối giám sát tốc độ
Mạch điều khiển được thiết kế tới 4 kờnh nhận tớn hiệu xung từ cỏc cảm biến tốc độ (Encorder), tớn hiệu về được mắc thờm cỏc tụ gốm để lọc nhiễu.Cỏc tớn hiệu xung từ cảm biến về đều được kết nối tới chõn ngắt ngoài của vi điều khiển.
3.3.6. Lựa chọn linh kiện
Trong mạch điều khiển chủ yếu sử dụng cỏc linh kiện điện tử thụ động như R, L, C, ngoài ra cũn một số linh kiện đặc biệt nhưng cũng hết sức thụng dụng như: FET – IRF540N; IRF9540N, cách ly quang tốc độ trung bỡnh - PC817; PC521, Diot xung – FR750.
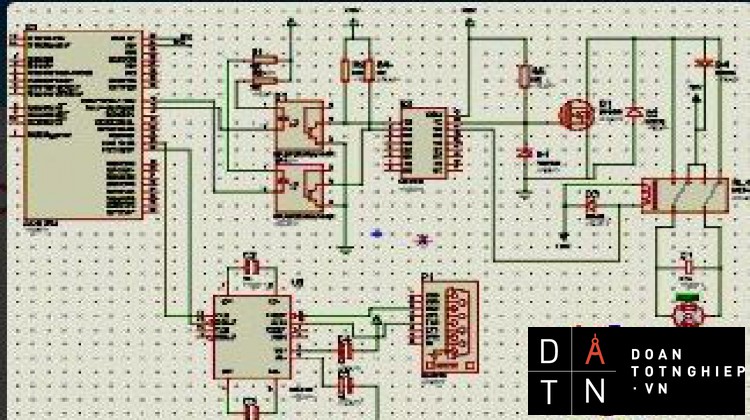
3.3.7. Mô phỏng
Mụ phỏng là quỏ trỡnh "bắt chước" một hiện tượng có thực nào đó. Các chương trỡnh mỏy tớnh cú thể mụ phỏng cỏc điều kiện thời tiết, cỏc phản ứng hoỏ học, thậm chớ cỏc quỏ trỡnh sinh học. Mụi trường IT cũng có thể mô phỏng được.
Trong mạch cú hai modul lớn đó là modul giao tiếp mỏy tớnh, modul cụng suất và đặc biệt là modul cụng suất vỡ modul này là phần biến đổi tớn hiệu điều khiển nhỏ thanh tớn hiệu lớn do vậy cỏc quỏ trỡnh dũng ỏp cần xem xét kĩ lưỡng, do vậy việc mụ phỏng là rất cần thiết. Sau đây là sơ đồ mụ phỏng hai khối.
3.4. Giải pháp truyền thông, tích hợp hệ thống
Từ yờu cầu thực tiễn và chức năng, nhiệm vụ của robot việc điều khiển tự động trong khụng gian rộng lớn, địa hỡnh khụng thuận lợi, vị trí tương đối chớnh xỏc là ớt khả thi do vậy việc điều khiển băng tay là giải phỏp tối ưu. Điều khiển không dây đang là xu hướng tất yếu của xó hội ngay nay do vậy trong đề tài nay cũng khụng nằm ngoài xu hướng chung ấy.
3.4.1. Mã hóa và giải mã
Đa phần các tín hiệu truyền đi qua sóng vô tuyến (RF : radio frequency) đều phải được mã hoá để bảo tính ổn định của thông tin. Một máy phát có mã hoá và máy thu có giải mã sẽ ít bị nhận sai dữ liệu hoặc cũng có thể sửa sai dữ liệu, khó bị can nhiễu hơn so với không mã hoá. Có rất nhiều kiểu mã hoá và giải mã, có thể mã hoá trực tiếp sóng mang như mã xung, mã pha, mã tần số,… hay cũng có thể mã hoá tín hiệu (dữ liệu) truyền đi .
3.4.2 Module thu, phát
Module phát
Đa phần các module phát OOK /ASK dùng để truyền dữ liệu, digital chưa có thành phần mã hoá thường được thiết kế đơn giản với 4 chân vào ra chính đó là: Chân VCC ( chân cấp nguồn ), chân GND ( chân Ground của mạch ), chân Data in, chân Anten out.
Các module thu cũng được chế tạo đơn giản với đầu ra Data out, Chân VCC, GND, Anten.
- Anten: Chân này là chân để gắn anten thu vào. Một module thu có anten sẽ tốt và thu được tín hiệu khoảng cách xa hơn so với không lắp anten .
- VCC và GND: Chân cấp điện áp nguồn cho module thu.
- Data out: Chân này sẽ đưa ra các xung 0 và 1 khi máy phát hoạt động phát 0, 1.
Đặc điểm của module thu: Bình thường khi cấp nguồn cho module thu thì đầu ra Data out có mức 0 ,1 ngẫu nhiên không xác định. Mức 0 hoặc 1 này do yếu tố môi trường tác động. Bởi thế khi lập trình giải mã cho các bộ thu thì không sử dụng ngắt để nhận ở đầu vào mà sẽ dùng phương pháp hỏi vòng, loại trừ.
3.4.3. Giải thuật mã hóa và giải mã Manchester
- Đặc điểm của mã hoá: Khi bạn phát một chuỗi tín hiệu 0 hoặc 1 quá dài thì có thể làm cho bộ thu hoạt động sai. Mã hoá manchester có nhiệm vụ phân đều khoảng thời gian dài thành những thời gian nhỏ, phù hợp với module phát và thu.
- Mã hoá manchester sẽ mã hoá tín hiệu 1 thành 10 và mã hoá tín hiệu 0 thành 01.
3.5. Lập trình điều khiển
Xuất phát từ yêu cầu, chức năng của hệ thống điều khiển Robot ta chia chương trình điều khiển cho Robot thành hai phần đó là: Chương trình trên mạch điều khiển gắn trên Robot, chương trình trên máy tính trung tâm. Quá trình điều diễn ra như sau. Máy tính sẽ đọc tất cả các thông tin về bàn phím (Các kí tự điều khiển Robot), nhận ảnh từ camera gửi về và nhận các thông tin về tọa độ các điểm trong khung điều khiển tự động sau đó tính toán ra các giá trị hướng, khoảng cách cần di chuyển cho Robot và truyền các giá trị đó ra cổng USB.
CHƯƠNG 4: CHẾ TẠO VÀ THỬ NGHIỆM
4.1. Mạch điện điều khiển
Mạch điện sau khi hàn gắn linh kiện đã được vận hành thử nghiệm từng module và cho kết quả tốt, ổn định, điều khiển tin cậy, đảm bảo các chức năng điều khiển Robot.
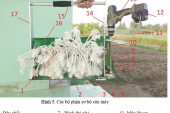
4.2. Mô hình Robot sau khi chế tạo
Sau khi Robot được hoàn thiện lắp ráp cơ khí, mạch điện được lắp ráp đúng vị trí, lập trình thử nghệm từng module của Robot trên giá thử. Chúng em đã tiến hành cho Robot thử leo cầu thang và cho kết quả tốt. Robot đã leo được cầu thang với chiều cao của bậc cầu thang là 150 mm, di chuyển lên được 13 bậc cầu thang, sau đó lùi đi xuống.
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
KẾT LUẬN
Theo yêu cầu nhiệm vụ của nhóm sinh viên nghiên cứu chúng em đã hoàn thành cơ bản các nhiệm vụ theo đúng mục tiêu yêu cầu đã đề ra: đã nghiên cứu tổng quan, thiết kế, chế tạo, thử nghiệm.
- Robot được chế tạo có hệ thống cơ khí ổn định, khá chắc chắn, di chuyển tốt.
- Robot có thể di chuyển linh hoạt trên một số cầu thang.
- Camera gắn trên Robot đã đợc thử nghiệm tốt, hình ảnh giám sát truyền được về máy tính điều khiển.
- Bộ thu, phát không dây cũng được thử nghiệm, truyền thông từ máy tính điều khiển đến Robot cho kết quả tốt và tin cậy.
- Hệ thống mạch thiết kế, thi công nghiêm chỉnh, bảo đảm chất lượng tốt, điều khiển tin cậy.
PHƯƠNG HƯỚNG PHÁT TRIỂN
Căn cứ vào các điều kiện cụ thể hiện nay như: sự phát triển của công nghệ điều khiển, các kỹ thuật nhận dạng, dẫn đường, định vị, điều khiển động lực, chúng em cho rằng hệ thống đã được thiết kế chế tạo hoàn toàn có đầy đủ tiềm năng phát triển định hướng các ứng dụng thực. Các hướng phát triển cụ thể như sau:
- Hoàn thiện cơ cấu tầm hướng Camera, điều khiển tầm hướng Camera.
- Nâng cao ổn định điều khiển hệ thống.
- Nghiên cứu sâu bài toán động lực học về điều khiển động lực,bám quỹ đạo hoạch định từng phần trên máy tính.
- Nghiên cứu, thử nghiệm tích hợp các module công tác khác.
- Nhận biết cầu thang, vật cản, tự động leo cầu thang, tránh vật cản.
TÀI LIỆU THAM KHẢO
Tiếng Việt:
[1]. GS. TS. Nguyễn Đắc Lộc, PGS. TS Lê Văn Tiến, PGS. TS Ninh Đức Tốn, PGS. TS Trần Xuân Việt, Sổ Tay Công Nghệ Chế Tạo Máy Tập 1, Nhà Xuất Bản Khoa Học Kỹ Thuật 2007.
[2]. GS. TS. Nguyễn Đắc Lộc, PGS. TS Lê Văn Tiến, PGS. TS Ninh Đức Tốn, PGS. TS Trần Xuân Việt, Sổ Tay Công Nghệ Chế Tạo Máy Tập 2, Nhà Xuất Bản Khoa Học Kỹ Thuật 2007.
[3]. GS. TS. Nguyễn Đắc Lộc, PGS. TS Lê Văn Tiến, PGS. TS Ninh Đức Tốn, PGS. TS Trần Xuân Việt, Sổ Tay Công Nghệ Chế Tạo Máy Tập 3, Nhà Xuất Bản Khoa Học Kỹ Thuật 2007.
Tiếng Anh:
[4]. https://knowledge.autodesk.com/support/inventor-products.
"TẢI VỀ ĐỂ XEM ĐẦY ĐỦ ĐỒ ÁN"
MỤC LỤC
MỞ ĐẦU.. 9
CHƯƠNG 1: TỔNG QUAN VỀ ROBOT DI ĐỘNG TRONG NHÀ.. 11
1.1. Các khái niệm về Robot di động, Robot di động trong nhà. 11
1.2. Phân loại Robot di động trong nhà. 11
1.2.1. Phân loại theo cấu trúc cơ cấu vận động. 11
1.2.2. Phân loại theo phương pháp điều khiển. 11
1.2.3. Phân loại theo hệ thống năng lượng. 12
1.3. Đặc điểm thiết kế, chế tạo một số mẫu Robot đã có. 12
1.3.1. Robot giúp làm việc nhà. 12
1.3.2. Robot lau nhà tự động. 13
1.3.3. ROBOT RC Stairclimbing. 15
CHƯƠNG 2: THIẾT KẾ TỔNG THỂ VÀ THIẾT KẾ CƠ KHÍ 17
2.1. Phân tích yêu cầu, chức năng của Robot 17
2.2. Lựa chọn cấu trúc, nguyên lý, thiết kế tổng thể. 17
2.2.1. Giải pháp tổng thể về cấu trúc. 17
2.2.2. Giải pháp điều khiển hệ thống, truyền thông. 20
2.3. Thiết kế tổng thể và thiết kế chi tiết 21
2.3.1. Thiết kế mô hình Robot 21
2.3.2. Lựa chọn động cơ điện một chiều. 24
2.3.3. Tính chọn bộ truyền động đai 27
2.3.4 Thiết kế chi tiết 32
2.4. Phân tích động học. 32
2.4.1 Xác định tham số dịch chuyển của Robot 33
CHƯƠNG 3: THIẾT KẾ BỘ ĐIỀU KHIỂN.. 36
3.1. Phân tích yêu cầu chức năng của bộ điều khiển. 36
3.2 Phân tích lựa chọn nguyên lý điều khiển Robot 36
3.3. Thiết kế sơ đồ chức năng, lựa chọn linh kiện, thiết kế sơ đồ nguyên lý, mô phỏng 37
3.3.1. Khối cung cấp nguồn. 38
3.3.2. Khối công suất 39
3.3.3. Khối đệm dữ liệu. 40
3.3.4. Khối xử lý trung tâm.. 41
3.3.5. Khối giám sát tốc độ. 44
3.3.6. Lựa chọn linh kiện. 44
3.3.7. Mô phỏng. 45
3.4. Giải pháp truyền thông, tích hợp hệ thống. 47
3.4.1. Mã hóa và giải mã. 47
3.4.2 Module thu, phát 48
3.4.3. Giải thuật mã hóa và giải mã Manchester 50
3.5. Lập trình điều khiển. 52
3.5.1 Lưu đô thuật toán điều khiển. 53
3.5.2. Lập trình trên máy tính. 53
3.5.2. Lập trình trên Robot 55
CHƯƠNG 4: CHẾ TẠO VÀ THỬ NGHIỆM.. 57
4.1. Mạch điện điều khiển. 57
4.1.1 Mạch điện được thiết kế trên máy tính. 57
4.1.2 Mạch in sau khi hàn gắn linh kiện. 58
4.2. Mô hình Robot sau khi chế tạo. 58
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN.. 61
*TÀI LIỆU THAM KHẢO
1. Nguyễn Hữu Lộc, Cơ sở thiết kế máy, NXB ĐHQGTP Hồ Chí Minh, 2004.
2. Nguyễn Trọng Hiệp, Chi tiết máy tập 1, 2 NXB Giáo dục, 1998.
3. Nguyễn Hữu Lộc, Bài tập chi tiết máy, NXB ĐHQGTP Hồ Chí Minh, 2003.
4. Nguyễn Hữu Lộc, Độ tin cậy trong thiết kế kỹ thuật , NXB ĐHQGTP Hồ Chí Minh, 2002.