đồ án tốt nghiệp CẢI TIẾN MÔ HÌNH TRẠM ĐIỀU KHIỂN QUÁ TRÌNH PCS


NỘI DUNG ĐỒ ÁN
LỜI NÓI ĐẦU ĐỒ ÁN TRẠM ĐIỀU KHIỂN QUÁ TRÌNH-PCS
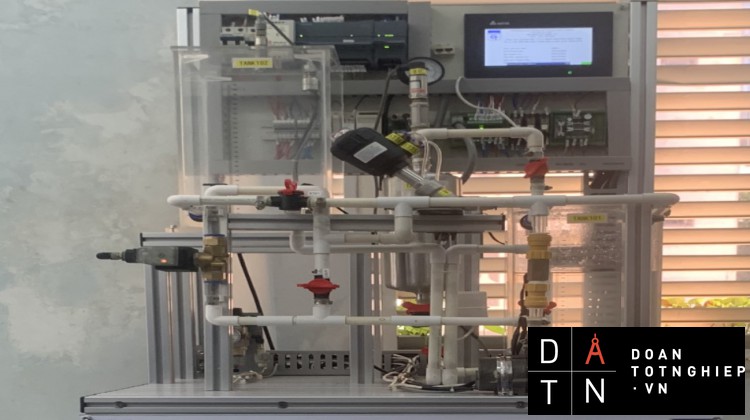
Thực tế hiện nay thứ các doanh nghiệp cần không còn là sức lao động của con người nữa mà thứ họ cần chất xám cùng với đó là Tự động hóa – Hiện đại hóa. Song song với đó là các qui trình được hoạt động một cách độc lập mà không cần đến sự giám sát của con người. Để đạt được điều đó thì Khoa học kỹ thuật của chúng ta phải đảm bảo 3 yếu tố là chính xác, ổn định và hiệu quả. Để nói rõ hơn thì đồ án này của chúng em là thiết kế thi công mô hình trạm PCS bằng việc mô phỏng quá trình lấy nước từ Tank 1 sang Tank 2 và ngược lại bằng cách viết chương trình nhập vào PLC điều khiển qua WinCC và trên HMI có thể điều khiển được mức nước lưu lượng và cũng như nhiệt độ áp suất. Với đề tài đồ án này chúng em sẽ thực nghiệm trên mô hình trạm PCS ban đầu là kiểm tra lại các thiết bị như các cảm biến, các thiết bị được lắp trên trạm,… sau đó coi nguyên lí làm việc của trạm bằng cách tìm kiếm tài liệu liên quan đến hoặc tài liệu của hãng Festo. Bước tiếp theo chúng em sẽ thiết kế chế tạo khungn đỡ bằng thép, đi lại đường ống dẫn nước của trạm, lắp đặt và thay thế các thiết bị tối ưu cho trạm như thay van điện từ bằng van xuyên khí nén, thay thế bộ phần làm mát của trạm để hoạt động tốt hơn, thiết kế hệ thống điều khiển và giám sát qua PLC, WinCC, màn hình HMI. Lắp đặt hệ hống hoàn chỉnh và sử dụng được
MỤC LỤC
LỜI CẢM ƠN ........................................................................................................... 1
LỜI NÓI ĐẦU........................................................................................................... 2
DANH SÁCH CHỮ CÁI VIẾT TẮT ....................................................................... 7
CHƯƠNG 1: TỔNG QUAN..................................................................................... 8
1.1. Tính cấp thiết của đề tài:............................................................................... 8
1.1.1. Các kết quả nghiên cứu nước ngoài: ......................................................... 8
1.2. Mục tiêu nghiên cứu của đề tài:.................................................................... 9
1.3. Nhiệm vụ của đề tài và giới hạn đề tài: ........................................................ 9
1.3.1. Nhiệm vụ đề tài: ........................................................................................ 9
1.3.2. Giới hạn đề tài: ........................................................................................ 10
CHƯƠNG 2: CƠ SỞ LÝ THUYẾT .................................................................... 11
2.1. Tổng quan về PLC S7-1200 ....................................................................... 11
2.1.1. Các thành phần của PLC ......................................................................... 11
2.1.2. Một số tính năng bảo mật giúp bảo vệ quyền truy cập vào cả CPU ....... 12
2.1.3. SIMATIC S7-1200 CPU 1214C DC/DC/DC.......................................... 12
2.1.4. Ứng dụng PLC......................................................................................... 13
2.2. Điều khiển quá trình (PCS) ........................................................................ 14
2.2.1. Điều khiển quá trình là gì? ...................................................................... 14
2.2.2. Mục đích ứng dụng hệ thống PCS? ......................................................... 14
2.2.3. Cấu trúc hệ thống PCS ............................................................................ 14
2.3. Bộ điều khiển PID ...................................................................................... 15
2.3.1. Mục tiêu sử dụng bộ điều khiển PID là gì? ............................................. 16
2.3.2. Ứng dụng của bộ điều khiển PID là gì? .................................................. 17
2.3.3. Bộ điều khiển PID liên tục ...................................................................... 18
2.3.4. Bộ điều khiển PID số............................................................................... 19
CHƯƠNG 3: THIẾT KẾ THI CÔNG BẢN VẼ CƠ KHÍ ...................................... 22
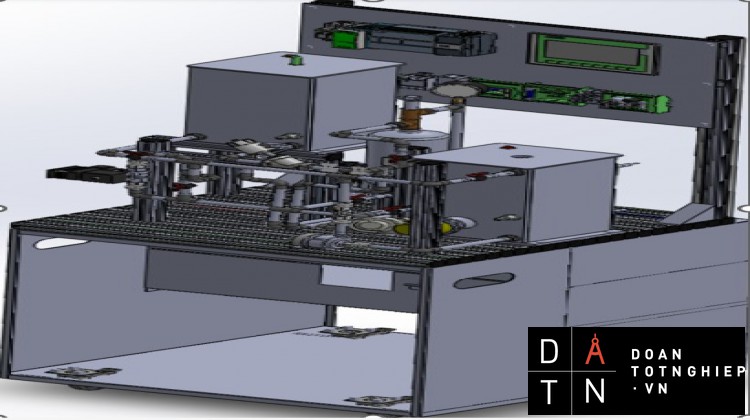
3.1. Hệ thống điều khiển quá trình .................................................................... 22
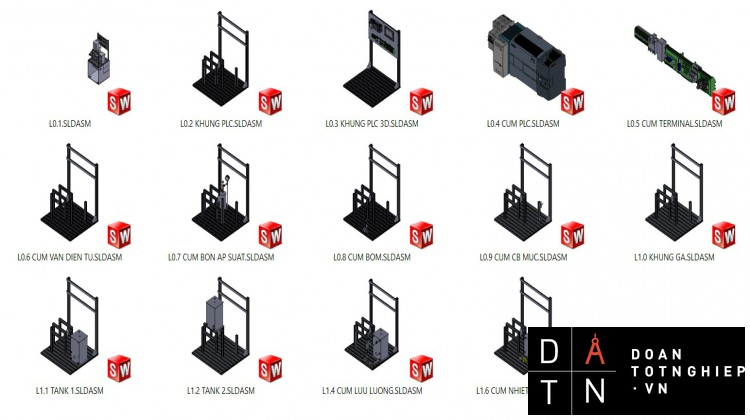
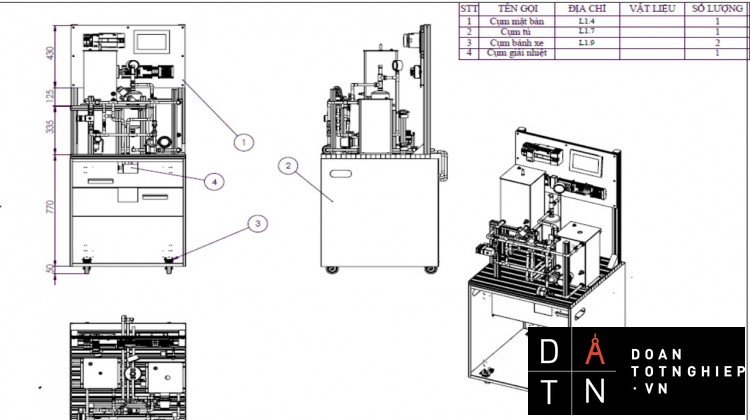
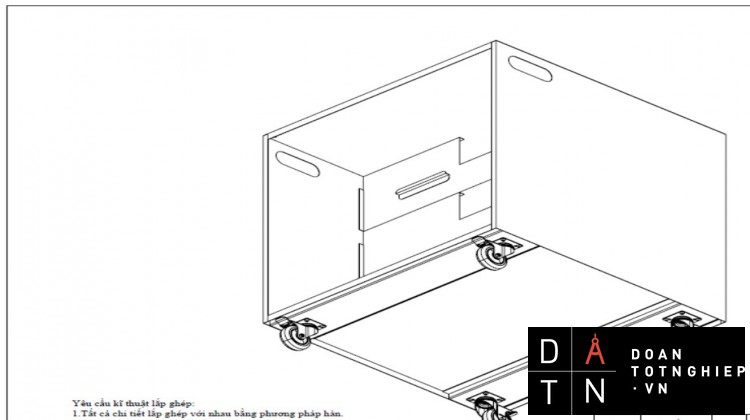
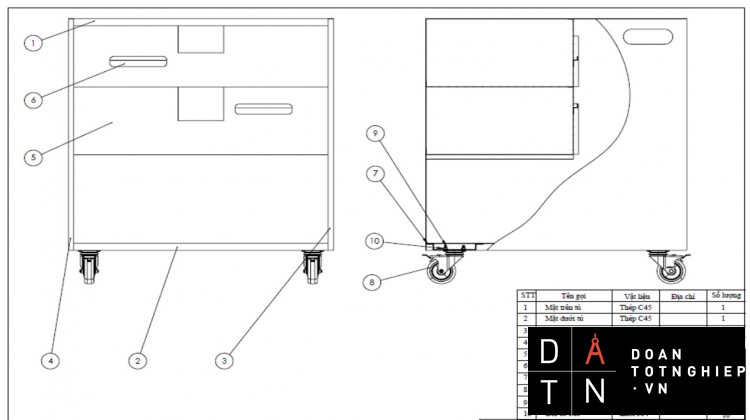
3.2. Cụm khung bàn........................................................................................... 23
3.2.1. Nhôm định hình ....................................................................................... 24
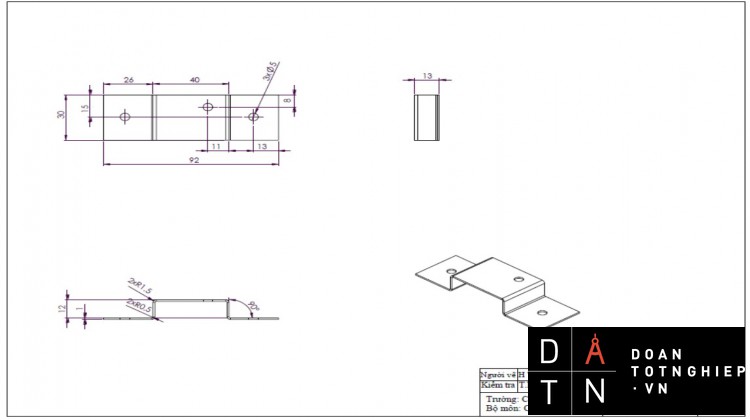
3.2.2. Gá cảm biến ............................................................................................. 24
3.2.3. Gá HMI.................................................................................................... 24
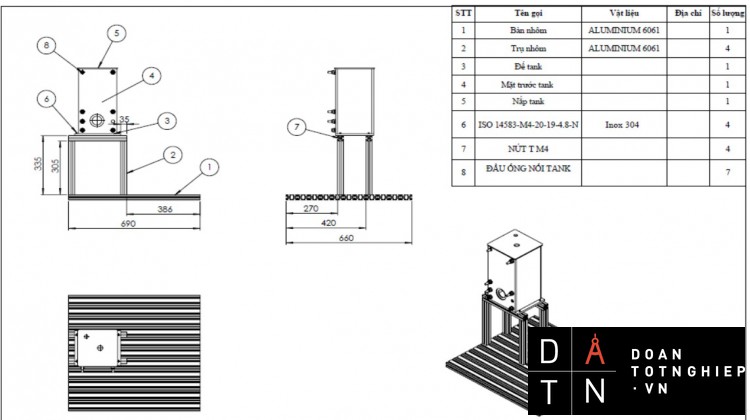
3.3. Cụm bồn nước ............................................................................................ 25
3.4. Cụm bơm – đường ống ............................................................................... 26
3.5. Cụm bồn áp suất ......................................................................................... 27
3.6. Cụm điện điều khiển ................................................................................... 28
CHƯƠNG 4: THIẾT KẾ THI CÔNG BẢN VẼ ĐIỆN .......................................... 29
4.1. Thiết kế hệ thống điện ................................................................................ 29
4.1.1. Thiết bị điện............................................................................................. 30
4.1.1.1. CB 2 cực ............................................................................................... 30
4.1.1.2. CB step ................................................................................................. 31
4.1.1.3. Nguồn 24VDC...................................................................................... 31
4.1.1.4. PLC S7-1200 CPU 1214C DC/DC/DC................................................ 32
4.1.1.5. Module analog sm1234 ........................................................................ 32
4.1.1.6. I/O Terminal DB25 .............................................................................. 33
4.1.1.7. Terminal DB15 ..................................................................................... 33
4.1.1.8. Relay..................................................................................................... 34
4.1.1.9. Bộ điều khiển động cơ.......................................................................... 34
4.1.2.1. SSR ....................................................................................................... 35
4.1.2.2. Hệ thống tản nhiệt ................................................................................ 35
4.1.2.3 Van xiên điều khiển khí nén DN25 ....................................................... 36
4.1.2.4 van 5/2 ................................................................................................... 36
4.1.2.5 Bộ lọc điều chỉnh khí nén ...................................................................... 37
4.1.2.6 Van tuyến tính ....................................................................................... 37
4.2. Các cảm biến............................................................................................... 38
4.2.1. Cảm biến siêu âm .................................................................................... 38
4.2.2. Cảm biến lưu lượng ................................................................................. 40
4.2.3. Cảm biến áp suất ..................................................................................... 42
4.2.4. Cảm biến nhiệt độ.................................................................................... 44
4.2.5. Cảm biến tiệm cận điện dung .................................................................. 45
4.2.6. Công tắc phao cảm biến mực nước ......................................................... 47
4.2.7. Thanh gia nhiệt ........................................................................................ 49
CHƯƠNG 5: THIẾT KẾ CHƯƠNG TRÌNH ĐIỀU KHIỂN................................. 50
5.1. Hệ thống điều khiển mức............................................................................ 50
5.2. Hệ thống điều khiển lưu lượng ................................................................... 53
5.3. Hệ thống điều khiển áp suất ....................................................................... 55
5.5. Lưu đồ giải thuật PLC ................................................................................ 58
CHƯƠNG 6: KẾT QUẢ VÀ HƯỚNG NGHIÊN CỨU ........................................ 59
6.1. Kết quả đạt được............................................................................................ 59
6.1.1.Màn hình HMI .......................................................................................... 59
6.1.2.Màn hình Wincc ....................................................................................... 64
6.2. Hạn chế và phương hướng khắc phục ........................................................ 67
6.3 Hướng phát triển............................................................................................. 67
PHỤ LỤC 1: CHƯƠNG TRÌNH ............................................................................ 68
PHỤ LỤC 2: BẢN VẼ ĐIỆN ................................................................................. 94
MỤC LỤC HÌNH ẢNH
Hình 2- 1 S7 -1200 CPU 1214C DC/DC/DC ........................................................ 12
Hình 2- 2 Biểu đồ đáp ứng thuật toán PID ............................................................. 16
Hình 2- 3 ứng dụng PID......................................................................................... 17
Hình 2- 4 Sơ đồ PID ................................................................................................ 18
Hình 2- 5 rời rạc hàm truyền PID........................................................................... 21
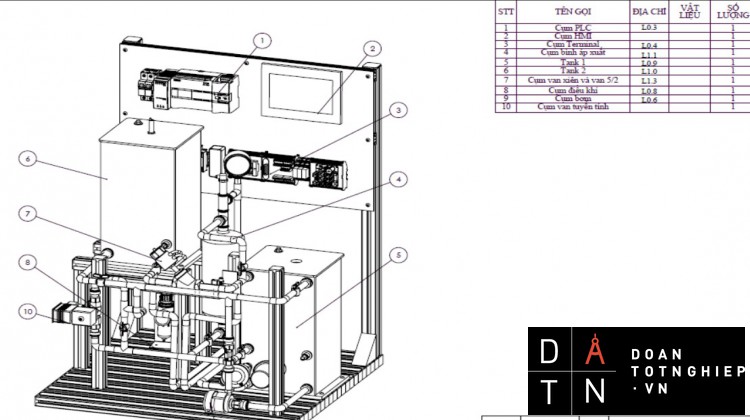
Hình 3- 1 Hệ thống điều khiển quá trình ............................................................... 22
Hình 3- 2 Cụm mặt bàn ........................................................................................... 23
Hình 3- 3 Nhôm định hình..................................................................................... 24
Hình 3- 4 Gá cảm biến ............................................................................................ 24
Hình 3- 5 Gá HMI ................................................................................................... 24
Hình 3- 6 Cụm bồn nước ......................................................................................... 25
Hình 3- 7 Cụm bơm-đường ống .............................................................................. 26
Hình 3- 7 Cụm bơm-đường ống .............................................................................. 26
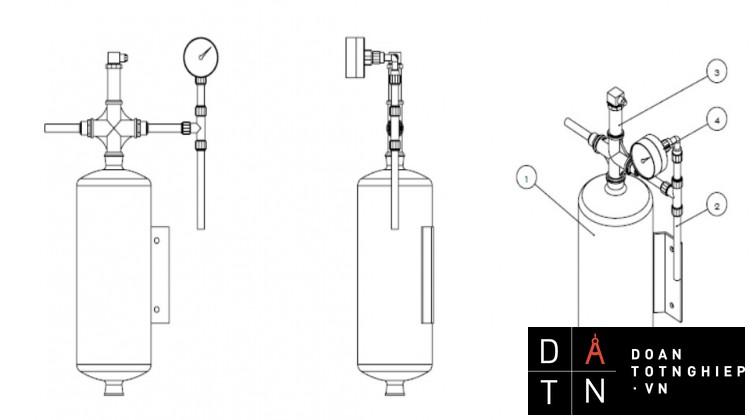
Hình 3- 8 Cụm bồn áp suất ..................................................................................... 27
Hình 3- 9 Cụm điện điều khiển................................................................................ 28
Hình 4- 1 Hệ thống điện điều khiển ........................................................................ 29
Hình 4- 2 CB 2 Cực ................................................................................................ 30
Hình 4- 3 CB Step.................................................................................................... 31
Hình 4- 4 nguồn 24VDC.......................................................................................... 31
Hình 4- 5 PLC 1214C DC/DC/DC.......................................................................... 32
Hình 4- 6 Module analog ........................................................................................ 32
Hình 4- 7 I/O Terminal DB25 ................................................................................. 33
Hình 4- 8 Terminal DB15........................................................................................ 33
Hình 4- 9 Relay........................................................................................................ 34
Hình 4- 10 module điều khiển động cơ DC6-90V 15A ........................................... 34
Hình 4- 11 SSR-40DA ............................................................................................ 35
Hình 4- 12 hệ thống tản nhiệt.................................................................................. 35
Hình 4- 13 Van xiên ................................................................................................ 36
Hình 4- 14 van 5/2................................................................................................... 36
Hình 4- 15 Bộ lọc .................................................................................................... 37
Hình 4- 16 Van tuyến tính ....................................................................................... 37
Hình 4- 17 cảm biến siêu âm................................................................................... 38
Hình 4- 18 cảm biến lưu lượng ............................................................................... 40
Hình 4- 19 cảm biến áp suất ................................................................................... 42
Hình 4- 20 Cảm biến nhiệt độ ................................................................................. 44
Hình 4- 21 cảm biến tiệm cận điện dung ................................................................ 45
Hình 4- 22 công tắc phao ........................................................................................ 47
Hình 4- 23 Thanh gia nhiệt ..................................................................................... 49
Hình 5- 1 Lưu đồ P&ID hệ thống điều khiển mức .................................................. 50
Hình 5- 2 Lưu đồ P&ID hệ thống điều khiển lưu lượng ......................................... 53
Hình 5- 3 Lưu đồ P&ID hệ thống điều khiển áp suất ............................................. 55
Bảng 6- 1 Giới thiệu về mô hình ............................................................................. 59
Bảng 6- 2 Trang chủ của mô hình........................................................................... 60
Bảng 6- 3 Cài đặt của mô hình ...............................................
MỤC LỤC BẢNG
Bảng 4- 1 Thông số kỹ thuật cảm biến siêu âm ...................................................... 39
Bảng 4- 2Thông số thiết lập cảm biến siêu âm ....................................................... 40
Bảng 4- 3 Thông số kĩ thuật cảm biến lưu lượng.................................................... 41
Bảng 4- 4 Thông số kỹ thuật cảm biến áp suất ....................................................... 43
Bảng 4- 5 Thông số kỹ thuật cảm biến nhiêt độ ...................................................... 45
Bảng 4- 6 Thông số kỹ thuật cảm biến tiệm cận điện dung .................................... 46
DANH SÁCH CHỮ CÁI VIẾT TẮT
PCS: Processing control system
PID: Proportional, Integral, and Derivative
HMI: Human – Machine – Interface PLC: Programmable Logic Controller FGS-PID: Fuzzy Gain Scheduling of PID MPS: Master Production Scheduling
CHƯƠNG 1: TỔNG QUAN
1.1. Tính cấp thiết của đề tài:
Trong xu thế hội nhập nền kinh tế quốc tế, việc phát triển công nghiệp hóa – hiện đại hóa luôn được Đảng và Nhà nước ta đặt ưu tiên hàng đầu trong lĩnh vực phát triển kinh tế, một trong những phương châm tối ưu và hiệu quả nhất đã xuyên suốt trong quá trình xây dựng đất nước ta ngày càng phát triển trong lĩnh vực công nghệ và khoa học kỹ thuật cũng như nhiều ngành lĩnh vực khác là “đi tắt đón đầu” tiếp thu những thành tựu khoa học hiện đại của thế giới để cải tiến nền kỹ thuật nước nhà, nhằm mục đích nước ta không còn lạc hậu về khoa học công nghệ. Và để nói một cách dễ hiểu và có cái nhìn tổng quan hơn về vai trò của “công nghiệp hóa” được áp dụng trong sản xuất. đời sống và cũng như trong học tập thì hôm nay em xin giới thiệu đề tài này đến mọi người đó là cải thiện việc điều khiển mức nước, nhiệt độ, áp suất và lưu lượng trong các hệ thống bồn nước hay cấp thoát nước trở nên chính xác và ổn định. Về “hiện đại hóa” đề tài vận dụng những công nghệ hiện đại để đưa việc điều khiển cùng với đó là giám sát trong các khâu trở nên dễ dàng, nhanh chóng và đáng tin cậy. Nhầm phát hiện và cảnh báo khi có sự cố xảy ra và khắc phục trong thời gian sớm nhất và mang tính chính xác cao.
1.1. Các kết quả nghiên cứu nước ngoài:
Hiện tại đề tài này có khá ít sự quan tâm và nghiên cứu sử dụng bộ điều khiển tương ứng, hệ thống điều khiển mức và tốc độ chảy có thể được thiết lập như một hệ thống điều khiển tầng. Thiết kế của các cảm biến và bộ truyền động van cho phép sử dụng cả bộ điều khiển liên tục (ví dụ: P, I, PI, PID) và không liên tục (ví dụ: bộ điều khiển 2 điểm) trong thí nghiệm. Máy bơm có thể được điều khiển bằng cách sử dụng tác động trực tiếp hoặc điều khiển tốc độ. Và ngày càng nhiều ngành công nghiệp và công ty xử lý các quy trình có kiểm soát mức chất lỏng đòi hỏi việc triển khai các hệ thống kiểm soát hiệu quả hơn nhằm đảm bảo các tiêu chuẩn cao về chất lượng sản xuất. Thì với mô hình toán học của máy trạm nhỏ MPS PA, ngoài việc thiết kế và phân tích bộ điều khiển PID theo lịch trình Fuzzy Gain (FGS-PID) thích hợp cho các ứng dụng điều khiển quá trình như điều khiển chất lỏng. Bộ điều khiển FGS-PID được sử dụng để điều khiển mức chất lỏng của một máy trạm quy mô phòng thí nghiệm do
Festo cung cấp. Máy trạm MPS PA là một hệ thống giáo dục, đào tạo tập trung vào lĩnh vực thực hành thiết bị đo đạc công nghiệp và sự phát triển của các thuật toán điều khiển trong lĩnh vực điều khiển quá trình. Hệ thống bao gồm một số thành phần trong số đó có thể được đề cập đến cảm biến, bộ chuyển đổi và bộ truyền động. Người vận hành có thể thiết lập các vòng điều khiển khác nhau như: điều khiển mức, áp suất, lưu lượng, nhiệt độ. Trạm này được thiết kế để đáp ứng 1 loạt các yêu cầu đào tạo và chuyên môn vì nó có 1 số thành phần được sử dụng rộng rãi trong nghành công nghiệp điều khiển quá trình. Mục đích chính của công việc này là hỗ trợ tính ưu việc của bộ điều khiển FGS-PID trên bộ điều khiển PID cổ điển. Do đó, một phân tích so sánh của các bộ điều khiển này được thực hiện. Bộ điều khiển FGS-PID và bộ điều khiển PID cổ điển đã được triển khai trên máy trạm nhỏ gọn MPS PA bằng giao diện phần mềm LabVIEW.
1.2. Mục tiêu nghiên cứu của đề tài:
+ Thiết kế chế tạo khung đỡ bằng thép, hệ thống khung đỡ bồn nước và hệ thống ông dẫn.
+ Thiết kế chế tạo hệ thống làm mát nước.
+ Thiết kế hệ thống điện.
+ Thiết kế hệ thống điều khiển vào giám sát bằng PLC, WinCC và HMI.
+ Lắp đặt hệ thống hoàn chỉnh cứng vững.
1.3. Nhiệm vụ của đề tài và giới hạn đề tài:
1.3.1. Nhiệm vụ đề tài:
MÔ TẢ CHỨC NĂNG
Mô hình hệ thống có chức năng thực hành điều khiển mực nước, lưu lượng, áp suất, nhiệt độ.
Máy điều khiển qua PLC , HMI và SCADA
❖ YÊU CẦU
Thiết kế chế tạo khung đỡ bằng thép, thay thế van đóng mở nước từ van điện thay bằng van khí .
Thiết kế chế tạo hệ thống làm mát nước.
Thiết kế hệ thống điện và điều khiển qua van tuyến tính. Thiết kế hệ thống điều khiển và giám sát bằng SCADA Lắp đặt hệ thống hoàn chỉnh cứng vững.
❖ NHIỆM VỤ THỰC HIỆN
CƠ KHÍ
Thiết kế chế tạo khung đỡ bằng thép, thay thế van đóng mở nước từ van điện thay bằng van khí .
Thiết kế chế tạo hệ thống làm mát nước. Lắp đặt hệ thống hoàn chỉnh cứng vững ĐIỆN, LẬP TRÌNH
Thiết kế hệ thống điện , kết nối cảm biến động cơ, HMI.
Lập trình PLC điều khiển hệ thống hoạt động đúng yêu cầu. Thiết kế hệ thống điện và điều khiển qua van tuyến tính. Thiết kế hệ thống điều khiển và giám sát bằng SCADA
1.3.2. Giới hạn đề tài:
Đề tài được nghiên cứu điều khiển các quá trình mức nước, lưu lượng, áp suất và nhiệt độ trên mô hình trạm PCS.








