ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử TAY MÁY ROBOT 4 BẬC TỰ DO

NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử TAY MÁY ROBOT
LỜI NÓI ĐẦU
Cơ điện tử (Mechatronics) là 1 kịch bản tự nhiên trong quá trình phát triển của kỹ thuật hiện đại. Sự phát triển của máy tính, sau đó là máy tính siêu nhỏ, máy tính tích hợp, công nghệ thông tin, công nghệ phần mềm, buộc Cơ điện tử phải phát triển như một yêu cầu cấp thiết vào những năm cuối thế kỷ 20. Đứng trước ngưỡng cửa của thế kỷ 21, với những tiến bộ được mong chờ trong các hệ cơ – sinh học tích hợp, máy tính lượng tử, hệ thống pico và nano, và những công nghệ khác đang triển khai, tương lai của cơ điện tử sẽ còn đầy tiềm năng hơn nữa. Có nhiều định nghĩa về Cơ điện tử (Mechatronics), nhưng những định nghĩa này đều thống nhất quan điểm: Cơ điện tử là sự kết hợp phức hợp của kỹ thuật cơ khí, kỹ thuật điện tử, kỹ thuật phần mềm (công nghệ thông tin), và các ngành khác, để tạo ra các sản phẩm và công nghệ đạt đến độ uyển chuyển, linh hoạt cao và ngày càng thông minh.
Cơ điện tử không phải là một cuộc cách mạng về công nghệ mà đó chỉ là sản phẩm của quá trình phát triển, cơ điện tử tạo ra sự thay đổi lớn khi biết phối hợp từ các công nghệ đã có. Trước đây các ngành chỉ phát triển riêng lẻ, chẳng hạn như các sản phẩm về điện tử thì chỉ đơn thuần là điện tử như các máy radio, các đầu video, ti vi... Trong khi đó sản phẩm về cơ khí cũng chỉ đơn thuần về cơ khí, ví dụ như một chiếc xe máy hầu hết đều là cơ khí máy móc... Ngành công nghệ phần mềm chỉ đơn thuần là xử lý dữ liệu thông qua máy vi tính... Công nghiệp và sản xuất ngày càng phát triển đòi hỏi có những dây chuyển sản xuất linh hoạt hơn, thông minh hơn. Trong tiêu dùng người tiêu dùng cũng đòi hỏi các sản phẩm có nhiều chức năng hơn và thông minh hơn... Ví dụ một chiếc máy giặt thời trước đây người dùng phải dùng tay bỏ quần áo vào, phải chọn chế độ qua nhiều nút bấm, nhưng một chiếc máy giặt ngày nay phải biết tự làm tất cả các công việc trên, tức là phải biết nhận biết quần áo bỏ vào ra sao, rồi tự động chọn chế độ nước, nhiệt độ nước, tự cho xà bông, tự giặt, sau đó phải tự sấy khô rồi báo cho chủ nhân biết sau khi đã hoàn thành. Những chú robot hoạt động độc lập không cần sự điều khiển của con người chính là sản phẩm của cơ điện tư. Muốn là được như vậy phải có sự kết hợp nhuần nhuyễn tinh tế giữa kỹ thuật điện tử (các mạch điện, điện tử...), kỹ thuật cơ khí (các loại động cơ, cơ cấu làm việc....), và kỹ thuật phần mềm (lập trình để thiết bị tự động hoạt động...). Sự kết hợp này hình thành nhiều đặc điểm riêng biệt mà các ngành trước đây không có, chính vì vậy ngành Cơ điện tử được hình thành.
Trong quá trình đào tạo ngành Công nghệ Kỹ Thuật Cơ Điện Tử , sinh viên được trang bị những kiến thức cơ sở của cả 3 ngành Cơ Khí – Điện Tử - Lập Trình.
Do có sự hạn chế về thời gian cũng như kiến thức và kinh nghiệm nên không thể tránh khỏi những sai sót. Rất mong nhận được những ý kiến đóng góp của quý thầy cô và các bạn về đề tài này .
Chương I: TỔNG QUAN
1.1 Lịch sử phát triển của Robot:
Thuật ngữ ROBOT xuất hiện vào năm 1920 trong một tác phẩm văn học của nhà văn Tiệp Khắc có tên Karel Capek.
Thuật ngữ Inducstrial Robot (IR) – xuất hiện đầu tiên ở Mỹ do công ty AMF quảng cáo mô tả một thiết bị mang dáng dấp và có một số chức năng như tay người được điều khiển tự động để thực hiện một số thao tác sản xuất thiết bị có tên gọi là Versatran.
Quá trình phát triển của IR có thể tóm tắt như sau:
- Từ những năm 50 ở Mỹ xuất hiện viện nghiên cứu đầu tiên.
- Đầu những năm 60 xuất hiện sản phẩm Versatran.
- Năm 1967 ở Anh bắt đầu nghiên cứu và chế tạo các IR theo bản quyền của Mỹ.
- Từ những năm 70 IR đến với các nước Tây Âu như: Đức, Ý, Pháp, Thụy Điển.
- Châu Á thì có Nhật bắt đầu nghiên cứu IR từ năm 1968.
Đến nay trên thế giới có khoảng 200 công ty sản xuất IR trong số đó có 80 công ty của Nhật, 90 công ty của các nước Tây Âu, 30 công ty của Mỹ và một số công ty ở Nga, Tiệp …
1.2 Định nghĩa
Ngày nay bên cạnh sự phát triển không ngừng của ngành công nghiệp máy tính thì lĩnh vực robot cũng không ngừng phát triển theo. Có rất nhiều quốc gia trên thế giới nghiên cứu về lĩnh vực này như: Nhật Bản, Mỹ, Úc, Nga… Và kết quả đạt được không khỏi khiến con người không ngạc nhiên. Do vậy cũng có rất nhiều khái niệm, cũng như định nghĩa về robot.
Theo viện nghiên cứu của Hoa Kỳ thì robot được định nghĩa như sau:
“Robot là một tay máy có nhiều chức năng, thay đổi được chương trình hoạt động, được dùng di chuyển nguyên vật liệu, chi tiết máy, dụng cụ hoặc dung cho những công việc đặc biệt thông qua những chuyển động khác nhau”. Còn theo giáo sư Masahioo (viện công nghệ Tokyo) thì robot công nghiệp phải có đặc điểm sau:
+ Có khả năng thay đổi chuyển động.
+ Có khả năng xử lý thông tin (biết suy nghĩ).
+ Có tính vạn năng.
+ Có những đặc điểm của người.
Nói chung có rất nhiều định nghĩa về robot, tuy nhiên có một sự thống nhất trong tất cả các định nghĩa là đặc điểm “điều khiển theo chương trình”.
1.3 Phân loại
Người ta phân biệt dựa vào các yếu tố chính sau:
+ Theo dạng hình học của không gian hoạt động.
+ Theo thế hệ robot.
+ Theo bộ điều khiển.
+ Theo nguồn dẫn động.
- Robot thế hệ thứ nhất
Bao gồm các robot hoạt động lập lại theo chu trình đã được lập trình từ trước (playback robots).
- Robot thế hệ thứ hai
Robot thế hệ này bao gồm các robot sử dụng các cảm biến trong điều khiển cho phép tạo được những vòng điều khiển kín kiểu servo.
- Robot thế hệ thứ ba
Đây là dạng phát triển cao nhất của robot. Các robot được trang bị các thuật toán xử lý các phản xạ logic thích nghi theo những thông tin và môi trường tác động lên robot -> robot tự biết làm và hoàn thành công việc cho trước. Robot thế hệ này bao gồm các hệ thống thu nhận hình ảnh trong điều khiển (vision-controlled robots) cho phép nhìn và nhận dạng các đối tượng thao tác.
- Robot thế hệ thứ tư
Bao gồm các robot sử dụng các thuật toán và cơ chế điều khiển thích nghi (adaptively controlled robots) có khả năng lựa chọn các đáp ứng tuân theo một mô hình tính toán xác định nhằm tạo ra những ứng xử phù hợp với điều khiển của môi trường thao tác.
- Robot thế hệ thứ năm
Là những robot được trang bị trí tuệ nhân tạo (artificially intelligent robots).
Để thống nhất trong cách gọi, thuật ngữ robot và tay máy được xem là một.
1.4Tình hình phát triển robot thế giới
Sự phát triển của khoa học kỹ thuật ngày càng nhanh góp phần nâng cao năng suất lao động. Đặc biệt là sự ra đời và sự phát triển của công nghệ chế tạo robot nhằm tạo ra sự tự động hóa trong quá trình sản xuất giảm đi sức lao động bằng chân tay của người lao động.
Đối với các nước ngoài, tự động hóa xuất hiện khá sớm, và đạt được nhiều thành tựu rất to lớn:
+ Robot công nghiệp:
+ Thám hiểm không gian:
Công nghệ cơ-điện tử đã trở thành một trong những ngành mũi nhọn của nhiều nước trên thế giới, với sự phát triển không ngừng của công nghệ bán bẫn, công nghệ thông tin, trí tuệ nhân tạo và cơ khí chính xác, robot không còn là một cỗ máy vô tri, mà nó bắt đầu cũng có cảm xúc, suy nghĩ và hành động như một sinh vật. Những thế hệ robot gần giống con người được các hãng ASIMO, MITSUBISHI, SONY, HONDA,..cho ra đời chứng tỏ sự phát triển và tương lai của ngành cơ-điện tử là rất mạnh mẽ.
Chương 2: ĐỘNG CƠ SERVO
2.1 Giới thiệu động cơ RC Servo:
- Động cơ RC (Radio Control) Servo đầu tiên được thiết kế để sử dụng trong điều khiển máy bay hoặc xe hơi. Về sau, động cơ này được sử dụng phổ biến như là các cơ cấu chấp hành được điều khiển bằng vi xử lý, vừa nhỏ gọn, vừa tiết kiệm năng lượng lại rẻ tiền.
-Động cơ RC Servo có moment xoắn cao so với kích thước của nó, có thể cho vị trí góc chính xác bằng cách cung cấp xung theo phương thức điều biến độ rộng xung (PWM); độ rộng của xung sẽ quyết định vị trí góc của trục động cơ.
- Động cơ servo được thiết kế để quay có giới hạn chứ không phải quay liên tục như động cơ DC hay động cơ bước. Mặc dù ta có thể chỉnh động cơ servo RC quay liên tục nhưng công dụng chính của động cơ servo là đạt được góc quay chính xác trong khoảng từ 00– 1800. Việc điều khiển này có thể ứng dụng để lái robot, di chuyển các tay máy lên xuống, quay một cảm biến để quét khắp phòng…
- Động cơ DC và động cơ bước vốn là những hệ hồi tiếp vòng hở - ta cấp điện để động cơ quay nhưng chúng quay bao nhiêu thì ta không biết, kể cả đối với động cơ bước là động cơ quay một góc xác định tùy vào số xung nhận được. Việc thiết lập một hệ thống điều khiển để xác định những gì ngăn cản chuyển động quay của động cơ hoặc làm động cơ không quay cũng không dễ dàng.
Mặt khác, động cơ servo được thiết kế cho những hệ thống hồi tiếp vòng kín. Tín hiệu ra của động cơ được nối với một mạch điều khiển. Khi động cơ quay, vận tốc và vị trí sẽ được hồi tiếp về mạch điều khiển này. Nếu có bất kỳ lý do nào ngăn cản chuyển động quay của động cơ, cơ cấu hồi tiếp sẽ nhận thấy tín hiệu ra chưa đạt được vị trí mong muốn. Mạch điều khiển tiếp tục chỉnh sai lệch cho động cơ đạt được điểm chính xác.
Động cơ servo có nhiều kiểu dáng và kích thước, được sử dụng trong nhiều máy khác nhau, từ máy tiện điều khiển bằng máy tính cho đến các mô hình máy bay và xe hơi. Ứng dụng mới nhất của động cơ servo là trong các robot, cùng loại với các động cơ dùng trong mô hình máy bay và xe hơi. Các động cơ servo điều khiển bằng liên lạc vô tuyến được gọi là động cơ servo R/C (radio-controlled). Trong thực tế, bản thân động cơ servo không phải được điều khiển bằng vô tuyến, nó chỉ nối với máy thu vô tuyến trên máy bay hay xe hơi. Động cơ servo nhận tín hiệu từ máy thu này. Như vậy có nghĩa là ta không cần phải điều khiển robot bằng tín hiệu vô tuyến bằng cách sử dụng một động cơ servo, trừ khi ta muốn thế. Ta có thể điều khiển động cơ servo bằng máy tính, một bộ vi xử lý hay thậm chí một mạch điện tử đơn giản dùng IC 555.
2.2 Cách thức hoạt động và phương pháp điều khiển:
- Như đã nói ở trên vị trí góc của động cơ RC Servo điều khiển dựa trên nguyên lý PWM.
- Servo đáp ứng của một dãy các xung số ổn định. Cụ thể hơn, mạch điều khiển là đáp ứng của một tín hiệu số có các xung biến đổi từ 1 – 2 ms. Các xung này được gởi đi 50 lần/giây – tức là ta sẽ cấp xung mỗi 20ms một lần. Servo đòi hỏi khoảng 30 – 60 xung/giây. Nếu số này qua thấp, độ chính xác và công suất để duy trì servo sẽ giảm.
- Chú ý rằng không phải số xung trong một giây điều khiển servo mà là chiều dài (độ rộng) của các xung, độ rộng của xung cấp sẽ quyết định vị trí góc của trục động cơ.
+ Với xung có độ rộng 1.5ms thì trục động cơ sẽ quay đến vị trí góc 900(thường được gọi là Neutral). (hình 6)
+ Với độ rộng xung nhỏ hơn 1.5ms thì trục động cơ sẽ quay gần về vị trí góc 00 và ngược lại nếu lơn hơn 1.5ms thì trục động cơ sẽ quay gần đến vị trí góc 1800
Hình 5: Giản đồ xung kích Servo.
- Các servo khác nhau ở góc quay được với cùng tín hiệu 1 –2 ms (hoặc bất kỳ) được cung cấp. Các servo chuẩn được thiết kế để quay tới và lui từ 900– 1800 khi được cung cấp toàn bộ chiều dài xung. Phần lớn servo có thể quay được 1800 hay gần 1800.
- Nếu ta cố điều khiển servo vượt quá những giới hạn cơ học của nó , trục ra của động cơ sẽ đụng vật cản bên trong, dẫn đến các bánh răng bị mài mòn hay bị rơ. Hiện tượng này kéo dài hơn vài giây sẽ làm bánh răng của động cơ bị phá hủy.
* Điều khiển:
Với nguyên tắc điều khiển như vậy thì ta có một phương án cấp xung cho động cơ như sau: góc quay của một động cơ là 1800, để quay hết 1800 đó, ta cần cấp xung có độ rộng từ 1,25ms cho đến 1,75ms, tức là khoảng 500μs. Càng chia nhỏ khoảng này thì vị trí góc của động cơ đạt được càng nhiều. Ví dụ: nếu ta có thể cấp xung với độ rộng chia nhỏ khoảng 2μs thì trong khoảng 500μs ta thu được 255 vị trí góc của động cơ, điều này có nghĩa là mỗi vị trí góc của động cơ là 0,70, còn nếu ta có thể cấp xung với độ rộng chia nhỏ khoảng 1μs thì trong khoảng 500μs đó, ta có thể thu được 500 vị trí góc của động cơ, tức là mỗi vị trí góc là 0,350. Điều này có ý nghĩa rất lớn đến độ chính xác khi điều khiển hệ PAN-TILT.
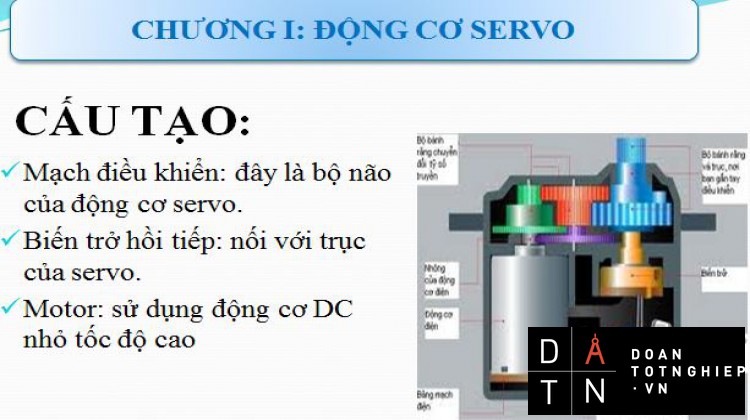
2.3 Cấu tạo
Động cơ RC SERVO bao gồm :
- Mạch điều khiển : đây là bộ não của RC SERVO. Mạch này có khả năng đáp ứng tín hiệu ngõ vào do người điều khiển ( tín hiệu PWM ) và chuyển đổi tín hiệu đó thành tín hiệu để điểu khiển động cơ quay, và làm cho trục ra quay đến vị trí mong muốn.
- Biến trở hồi tiếp : trục ra của RC SERVO được nối với 1 biến trở, khi trục ra quay thì biến trở này cũng quay. Bằng cách này, mỗi vị trí của trục ra sẽ tương ứng với mỗi giá trị khác nhau của biến trở. Chỉ cần đọc giá trị của biến trở về, thì bộ điều khiển sẽ có thể biết được chính xác góc trục ra của RC SERVO.
- Motor : RC SERVO sử dụng motor DC nhỏ tốc độ cao được điều khiển bởi mạch cầu H kết nối với bộ điều khiển của RC SERVO.
Motor được chia làm 2 loại :
- Động cơ không chổi than.
- Động cơ có chổi than.
- Hộp giảm tốc : nhằm để tạo ra tốc độ của trục ra đạt được tốc độ mong muốn ở ngõ ra. Ngoài ra, hộp giảm tốc dùng để giảm số vòng quay ngõ ra để tăng moment xoắn nhằm chịu tải được cao hơn.
Bánh răng của hộp giảm tốc gồm 2 loại :
- Bánh răng nhựa : đây là loại bánh răng được sử dụng thông dụng. Với loại bánh răng này thì RC chạy êm nhưng độ bền của bánh răng không cao và chịu tải không cao.
- Bánh răng kim loại : đối với nhông kim loại thì sẽ có độ bền cao hơn và chịu được tải lớn nhưng giá thành cao hơn RC sử dụng bánh răng nhựa.
- Trục ra của RC SERVO : sẽ đáp ứng chính xác vị trí góc mà bộ điều khiển đã đưa tín hiệu.
- Bạc đạn : ở trục ra của RC SERVO có gắn 1 bạc đạn nhằm để trục ra quay êm, nhẹ nhàng và chính xác hơn là sử dụng ống lót nhựa.
- Dây điều khiển gồm 3 dây : ( ở đây sử dụng RC SERVO của hãng JR )
- Dây màu nâu : dây mass
- Dây màu đỏ : dây nguồn từ 4,8V đến 6V
- Dây màu vàng : dây tín hiệu xung được đưa từ mạch điều khiển. ( có biên độ từ 3-5V ).
2.4 Thông số kỹ thuật
|
SERVO TYPE |
LENGTH |
WIDTH |
HEIGHT |
WEIGHT |
TORQUE |
TRANSIT TIME |
|
Standard |
1.6” |
0.8” |
1.4” |
1.3oz |
42oz-in |
0.23sec/60o |
|
1/4-scale |
2.3” |
1.1” |
2.0” |
3.4oz |
130 oz-in |
0.21sec/60o |
|
Mini-micro |
0.85” |
0.4” |
0.8” |
0.3oz |
15 oz-in |
0.11sec/60o |
|
Low profile |
1.6” |
0.8” |
1.0” |
1.6oz |
60 oz-in |
0.16sec/60o |
|
Sail winch small |
1.8” |
1.0” |
1.7” |
2.9oz |
135 oz-in |
0.16sec/60o |
|
Sail winch large |
2.3” |
1.1” |
2.0” |
3.8oz |
195 oz-in |
0.22sec/60o |
- RC SERVO JR sử dụng điện áp từ 4.8-6V.
- Xung điều khiển RC (peak to peak) : 3-5V.
- Độ rộng xung điều khiển (PWM) : từ 600us đến 2300us. Với độ rộng xung này thì tương ứng RC quay được một góc 180o ( từ -90o đến +90o).
- Tốc độ RC :
* Ở điện áp 4.8V : RC quay 0.23sec/60o (không tải).
* Ở điện áp 6V : RC quay 0.19sec/60o (không tải).
- Moment xoắn :
* Ở điện áp 4.8V : RC chịu tải là 3.2 kg.cm.
* Ở điện áp 6V : RC chịu tải là 4.1 kg.cm.
2.5 Phân loại:
Có nhiều cách phân loại servo:
- Phân loại về nguồn cấp: có servo 1 chiều, servo xoay chiều 1 pha, servo xoay chiều 3 pha.
- Phân loại về vật liệu làm hộp giảm tốc có: bằng composit, kim loại, hợp kim.
Có 3 loại vật liệu được dùng để làm hộp giảm tốc RC servo:
- Nylon: được sử dụng nhiều nhất. Hộp giảm tốc nylon nhẹ, chạy êm và không bị ăn mòn, nhưng độ bền không cao và mômen xoắn không cao.
- Kim loại: Là vật liệu có khả năng chịu tải tốt nhất. Hộp giảm tốc kim loại nặng và, do sự mài mòn giữa các bánh răng sẽ dần dần làm lỏng các bánh răng, dẫn đến làm giảm sự chính xác cho vị trí và đôi khi gây ra sự không ổn định hay dao động trong một số trường hợp có tải. Hiện nay hộp giảm tốc bằng titan là khá đặt, nhưng loại hộp số này chống mài mòn rất tốt.
- Karbon: Không phải là vật liệu cacbon dễ gây cháy nổ, đây là vật liệu nhựa được gia cố bằng cacbon để trở nên cứng hơn. Hộp giảm tốc karbon của Hitec khỏe hơn và bền hơn hộp số nylon, nhưng hộp số kim loại vẫn khỏe nhất.
........................................................................
Chương 3: GIỚI THIỆU ĐỀ TÀI VÀ PHƯƠNG PHÁP NGHIÊN CỨU
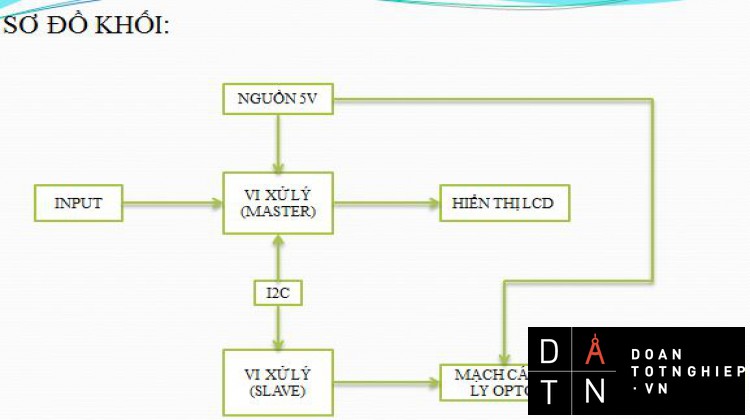
3.1Thành phần :
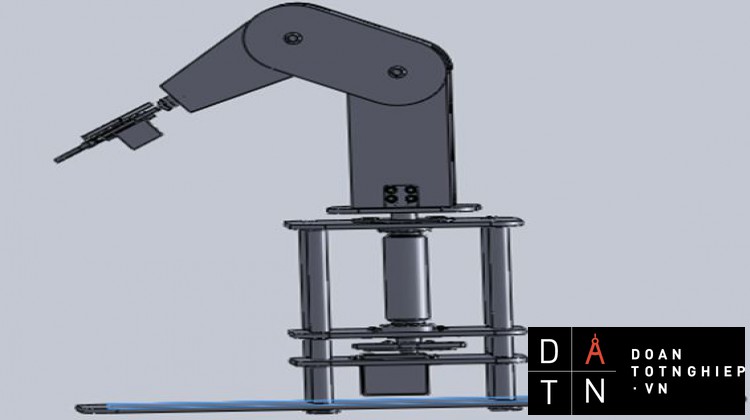
Đề tài Thiết kế mô hình tay máy 4 bậc tự do sử dụng động cơ RC SERVO bao gồm các thành phần chính:
- Động cơ RC SERVO.
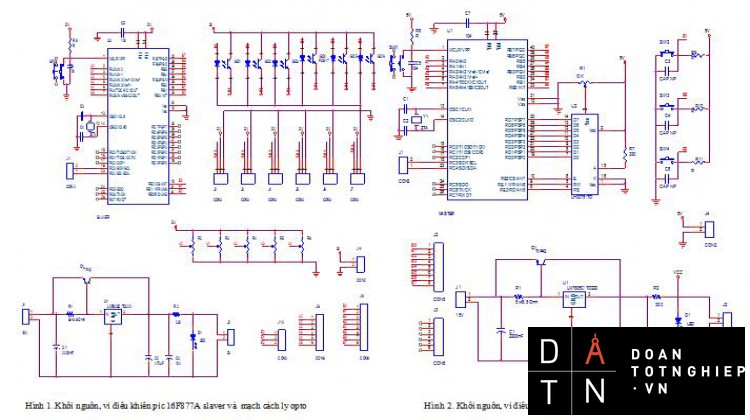
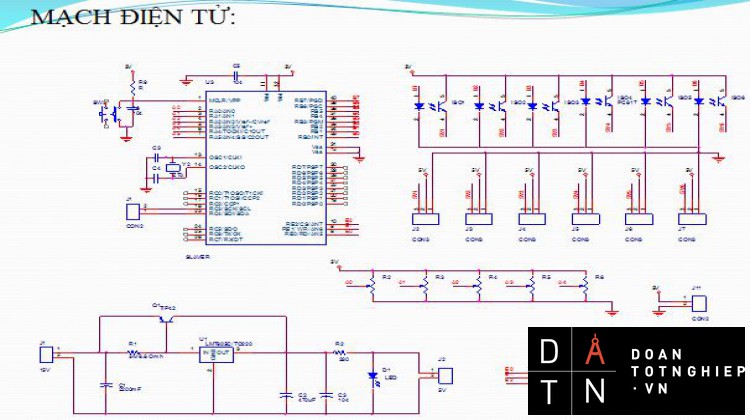
- Phần cứng lập trình Vi điều khiển PIC 16F877A.
- LCD để giao tiếp với người điều khiển.
3.2 Ý nghĩa đề tài :
Đề tài điều khiển cánh tay Robot là một ứng dụng thực tế mà hiện nay đang phát triển mạnh mẽ, đa dạng và sinh động, nó được ứng dụng nhiều trong các nhà máy sản xuất nhằm giảm bớt công sức lao động của con người đồng thời nâng cao số lượng cũng như chất lượng của sản phẩm, nên nó phù hợp nhiều ứng dụng thực tế,...
Áp dụng những kiến thức đã học vào thực tế như robot công nghiệp, vi xử lí, kỹ thuật điện tử.
3.3 Giới hạn nghiên cứu :
- Động cơ RC SERVO.
- Vi điều khiển PIC 16F877A.
- Sử dụng ngôn ngữ lập trình C (CCS).
- Chương trình nạp Vi điều khiển PICkit 2.
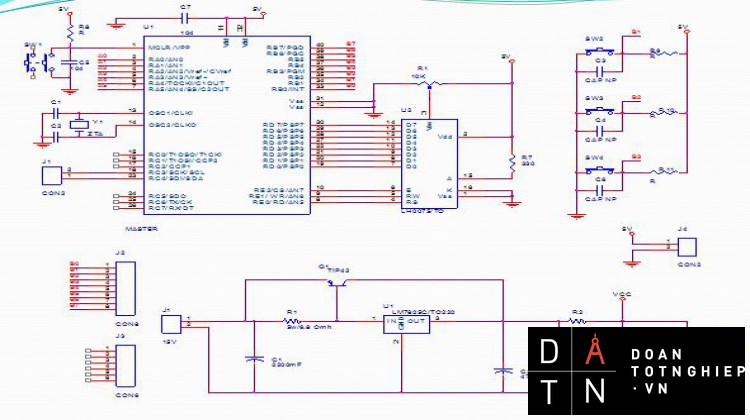
- Thiết kế mạch điều khiển và mô phỏng với sự hổ trợ của phần mềm OrCAD 9.2, PROTUES 7.4
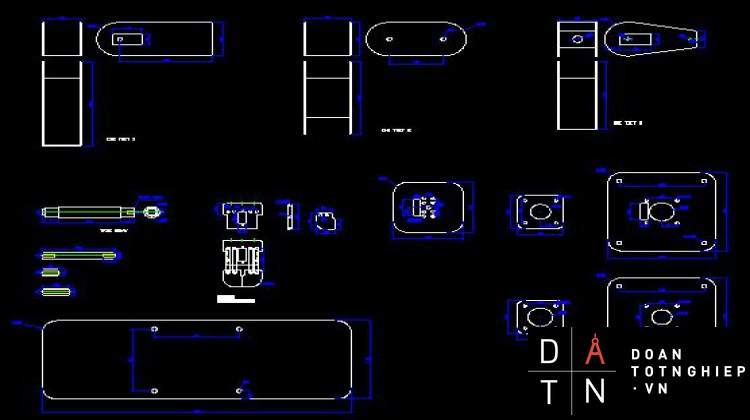
-Thiết kế mô hình cơ khí với sự hỗ trợ của phần mềm AUTOCAD 2007, SOLIDWORK 2010.
- Sử dụng trình biên dịch PCWH 4.038 ngôn ngữ lập trình C.
- Giao tiếp I2C.
3.4 Giới hạn :
- Lập trình làm việc cho tay máy bằng tay chạy tự động, điều khiển vật bằng biến trở.
- Cho tay máy hoạt động thao các thao tác đã được học (chế độ practice).
......................................................................................
}
if(input(pin_d4)==1)//button stop
{
reset();
break;
}
}
}
void main()
{
setup_adc_ports(ALL_ANALOG);
setup_adc(adc_clock_internal);
setup_timer_1(T1_INTERNAL|T1_DIV_BY_2);
enable_interrupts(INT_TIMER1);
enable_interrupts(GLOBAL);
output_low(pin_d0);
output_b(0x00);
output_low(pin_c0);//kiem tra save
reset();
while(1)
{
if(input(pin_c0)==1)//////////////////////button che do chay tu dong/////////////////
{
chay1();
}
if(input(pin_c2)==1)///////////////////////button che do doc adc/////////////////////
{
docadc=1;
doc_adc();
}
}
CHƯƠNG 7: KẾT QUẢ THỰC HIỆN VÀ HƯỚNG PHÁT TRIỂN
Kết quả:
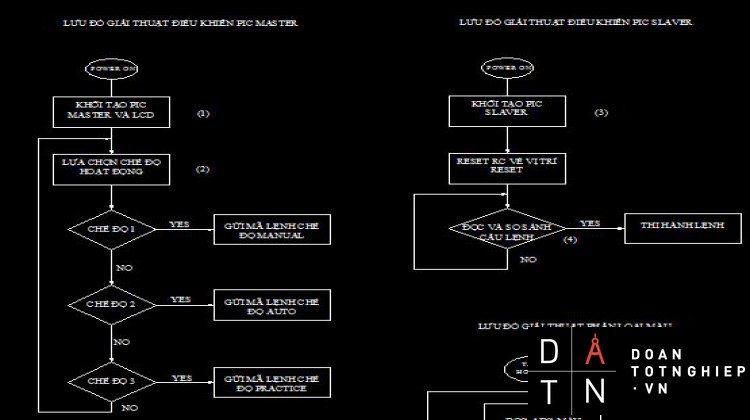
Tay máy chỉ có ba chế độ điều khiển:
- Chế độ điều khiển MANUAL: người điều khiển chỉnh các nút biến trở để tay máy di chuyển theo ý muốn.
- Chế độ AUTO: thực hiện chức năng chạy tự động.
- Chế độ PRATICE: ghi nhớ các thao tác và thực hiện lại chu trình như chương trình chạy tự động mới.
- Tay máy hoạt động đúng như mục đích thiết kế.
- Thực hiện thao tác tương đối chính xác.
- Tay máy được điều khiển nhiều khớp cùng lúc nên thao tác nhanh.
Hạn chế:
- Chưa nội suy khi tay máy di chuyển.
- Tay máy chưa đẹp mắt về cơ khí.
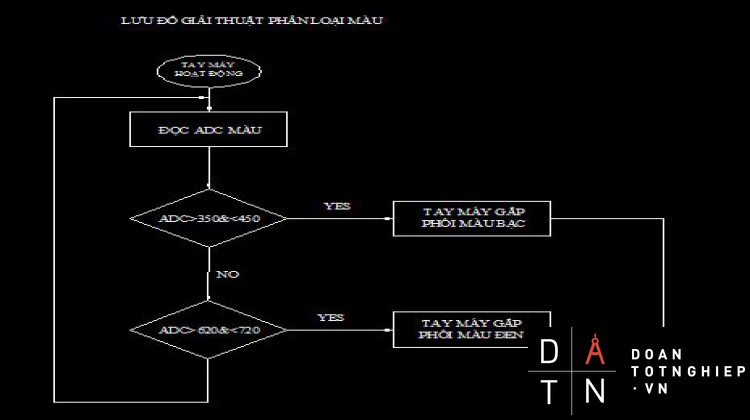
- Chưa hoàn chỉnh về phân loại màu.
Hướng phát triển:
- Khắc phục phần cơ khí.
- Nội suy đường đi cho tay máy.
- Sử dụng loại đông cơ có công suất lớn hơn.











