ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOT LAU SÀN


NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP CƠ ĐIỆN tử THIẾT KẾ ROBOT LAU SÀN
LỜI GIỚI THIỆU
Trong sự phát triển của công nghệ và máy móc hiện đại luôn giành được sự quan tâm đặc biệt của cả đất nước , việc sử dụng các robot trong các nhà máy đang không ngừng phát triển về số lượng và cũng có khả năng thay thế con người trong tương lai gần. Hiện nay đất nước ngày càng phát triển ,bộ môn cơ điện tử là một trong những ngành mũi nhọn . Với sự thiết thực đó nhóm em đã nảy sinh ý tưởng về Robot lau sàn. Robot này có thể điều khiển từ xa theo ý của con người thông qua bộ điều khiển tay game. Thế giới càng ngày tiến lên với một công nghệ mới, công nghệ tự động trong mọi lĩnh vực, và sản phẩm robot là một trong những sản phẩm của ngành cơ – điện tử thể hiện rõ nét nhất .Thế giới và nước ta hiện đang để tâm rất nhiều đến vấn đề chế tạo robot. Đã có rất nhiều cuộc thi được tổ chức để khích lệ tinh thần ham học hỏi và tích lũy kinh nghiệm về những bước đầu chế tạo robo dành cho sinh viên, trong đó, xe dò line, robo-con, robo sumo… là những cuộc thi được tổ chức dành cho sinh viên nhiều nhất. Nhận thấy, công nghệ chế tạo robot sẽ là một trong những ngành quan trọng nhất, là một ngành mà bất cứ quốc gia nào cũng rất chú trọng trong việc phát triển đất nước.
Chính yêu cầu này đã hình thành nên ngành Cơ điện tử, để tạo ra sản phẩm mới đáp ứng các yêu cầu đặt ra trên cơ sở phối hợp nền tảng sẵn có của các ngành với nhau.Với khả năng am hiểu về cơ khí, điện tử, tin học, và các công nghệ hiện đại... người kỹ sư cơ điện tử đưa vào các sản phẩm cơ khí hệ thống điều khiển linh hoạt bằng điện tử.và thực tế nhóm tôi đã nghiên cứu để thiết kế ra một robot lau sàn để nhằm phục vụ cho lợi ích của con người.
MỤC LỤC
CHƯƠNG 1: GIỚI THIỆU CHUNG VỀ ĐỀ TÀI. 1
1.1.Giới thiệu chung về đề tài:. 1
1.2. Nhiệm vụ đề tài :. 2
1.3. Hướng giải quyết :. 2
1.4. Giải quyết vấn đề:. 3
CHƯƠNG 2: THIẾT KẾ VÀ THI CÔNG.. 4
1. Cơ khí:. 4
2. Điện tử :. 9
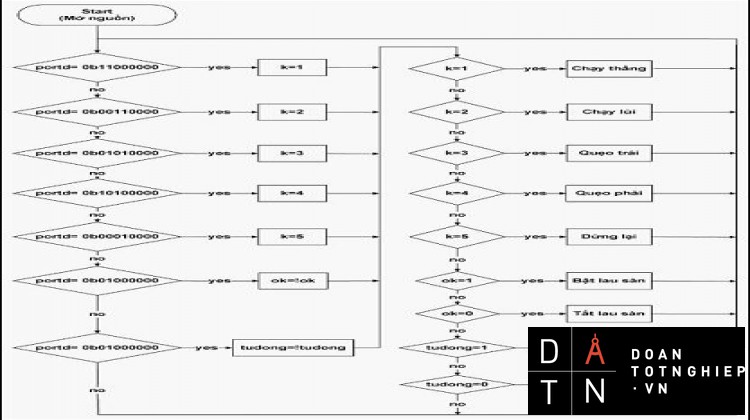
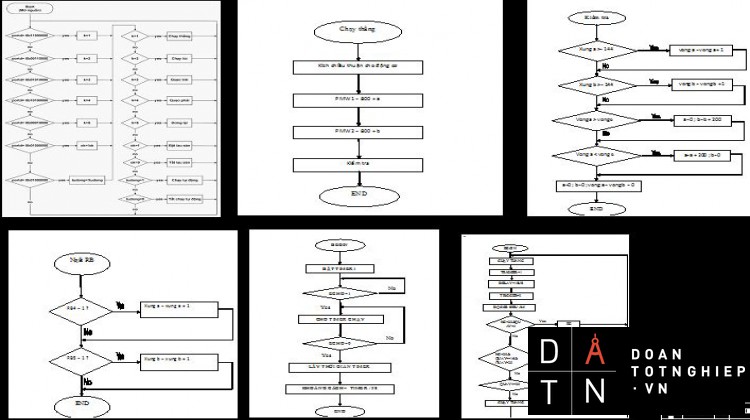
3. Lập trình. 21
LƯU ĐỒ GIẢI THUẬT. 21
CHƯƠNG 3: KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN.. 27
1.Kết quả:. 27
2.Hạn chế và hướng khắc phục:. 27
3.Hướng phát triển:. 28
TÀI LIỆU THAM KHẢO.. 29
DANH MỤC HÌNH VẼ
- Phần cơ khí:
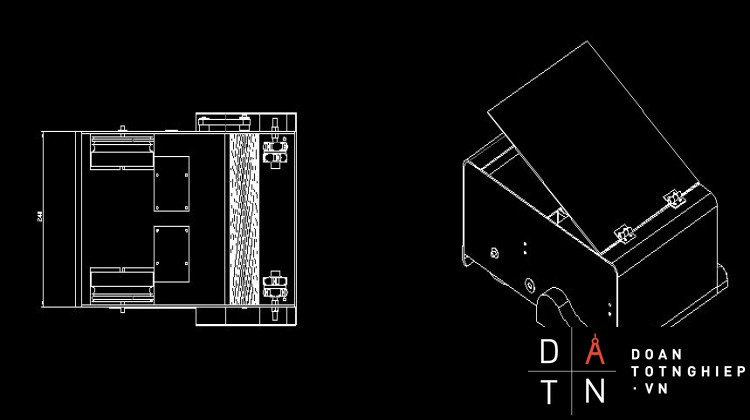
- Hình 1.1 : Tổng thể cơ khí của xe
- Hình 1.2 : Bộ truyền động bánh sau
- Hình 1.3 : Động cơ chính
- Hình 1.4 : Bánh xe omi
- Hình 1.5 : Động cơ lau sàn
- Hình 1.6 : Trục lau sàn
- Hình 1.7 : Cơ khí bên trong
- Phân điện tử :
- Hình 2.1 : Bộ thu sóng RF
- Hình 2.2 : Bộ phát sóng RF
- Hình 2.3 : gamepad hoàn chỉnh
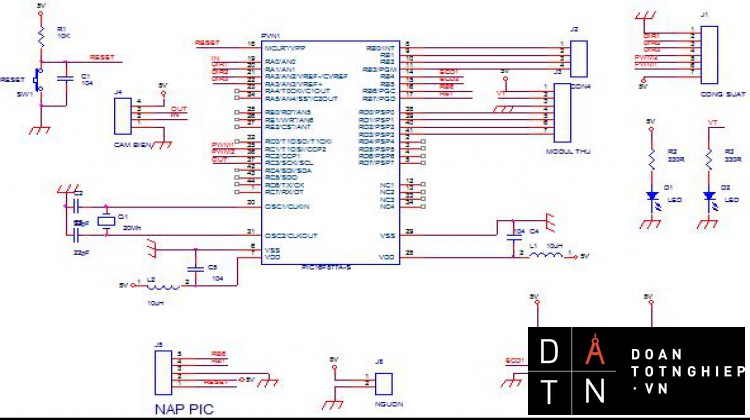
- Hình 2.4 : Mạch vi điều khiển
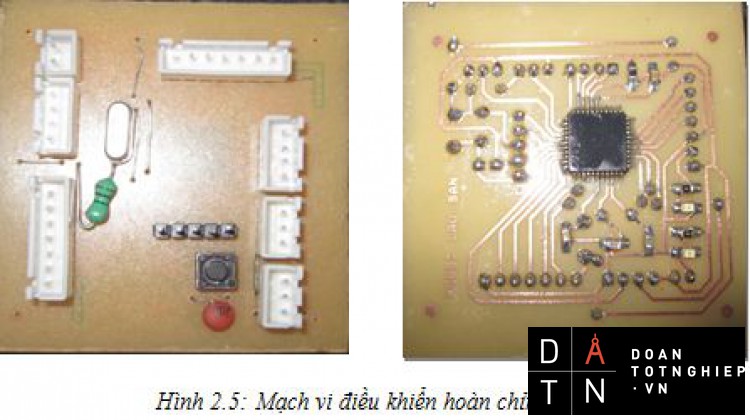
- Hình 2.5 : Mạch vi điều khiển hoàn chỉnh
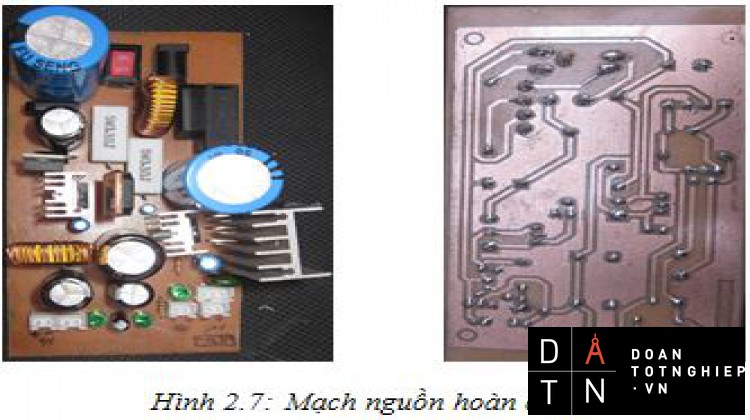
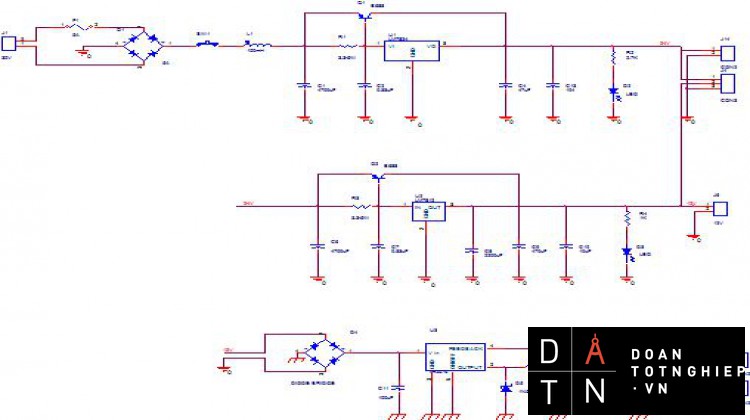
- Hình 2.6 : Mạch nguồn
- Hình 2.7 : Mạch nguồn hoàn chỉnh
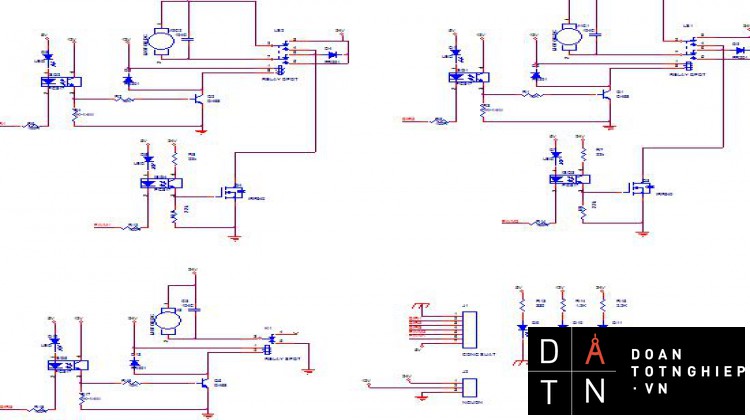
- Hình 2.8 : Mạch công suất
- Hình 2.9 : Mạch công suất hoàn chỉnh
- Hình 2.10 : Cảm biến siêu âm
- Hình 2.11 : Sơ đồ chân cảm biến
CHƯƠNG 1: GIỚI THIỆU CHUNG VỀ ĐỀ TÀI
1.1.Giới thiệu chung về đề tài:
Ngày nay, trên thế giới robot không còn là điều mới lạ nữa. Robot được sử dụng rất phổ biến đặc biệt là ở những nước phát triển, họ sử dụng robot trong mọi lĩnh vực. Tuỳ vào mục đích sử dụng mà người ta sáng tạo ra những con robot có thể đáp ứng được yêu cầu đã được đưa ra. Robot có thể thay thế cho con người làm những công việc nguy hiểm. Ví dụ như: làm việc trong những môi trường có hàm lượng chất phóng xạ cao mà có thể gây ra những hậu quả rất nguy hiểm cho con người.
Robot đang ngày càng được cải tiến và phát triển hơn, từ khả năng tự động hoá để làm những cộng việc theo lộ trình cố định, cho đến robot điều khiển từ xa với khả năng hoạt động rộng hơn, phát triển xa hơn nữa là trí tuệ nhân tạo với khả năng tự xử lý tình huống. Hiện nay, robot thông minh nhất là người máy ashimo, có thể giao tiếp với con người và khả năng di chuyển giống con người.
Ở Việt Nam, thì các ngành khoa học-công nghệ đang nắm vai trò quan trọng để có thể đưa nước ta lên một tầm cao mới. Khoa học-công nghệ phát triển thì đất nước ngày càng giàu mạnh hơn. Muốn khoa học- công nghệ phát triển thì cần phải có thời gian và sự hiểu biết cũng như sự đầu tư nhiều. Vì thế, để khơi dậy niềm đam mê cũng như tính sáng tạo của các thế hệ trẻ Việt Nam, nước ta đã tổ chức rất nhiều hoạt động mang tính sáng tạo, đặc biệt là cuộc thi sáng tạo robot con. Với sự tham gia của rất nhiều trường đại học và cao đẳng. Đã tạo ra một sân chơi cho sinh viên thúc đẩy tính sáng tạo của mỗi người.
Robot lau sàn là một trong những robot thông dụng và phục vu cho lợi ích của con người hiện nay. Với khả năng di chuyển tự động một cách linh hoạt và có thể tránh vật cản nhờ sự hỗ trợ của bộ thu song RF điểu khiển bang tay và tự động của cảm biến siêu âm. Cảm biến siêu âm có thể ví như là cặp mắt của robot lau sàn , nhờ nó mà robot lau sàn có thể xác định được khoảng cách của vật và có thể tránh vật cản và lau được nhưng không gian muốn lau của ngôi nhà.
1.2. Nhiệm vụ đề tài :
Robot lau sàn được điều khiển bằng tay qua bộ thu sóng RF, lau theo sự điều khiển của con người. Và Robot lau sàn được phát triển thêm chức năng lau sàn tự động nhờ cảm biến siêu âm.
1.3. Hướng giải quyết :
1.4. Giải quyết vấn đề:
- Những phần cơ khí và mạch điện tử được nhóm chúng em thực hiện song song và chia công việc cho từng thành viên đó có thể hoàn thành công việc nhanh nhất.
- Đi mua ngoài thực tế vài lần và thông qua các thầy, các cô, các anh chị khóa trước, các bạn khác có kinh nghiệm hơn đã bổ sung cho sự thiếu hiểu biết của mình.
CHƯƠNG 2: THIẾT KẾ VÀ THI CÔNG
1. Cơ khí:
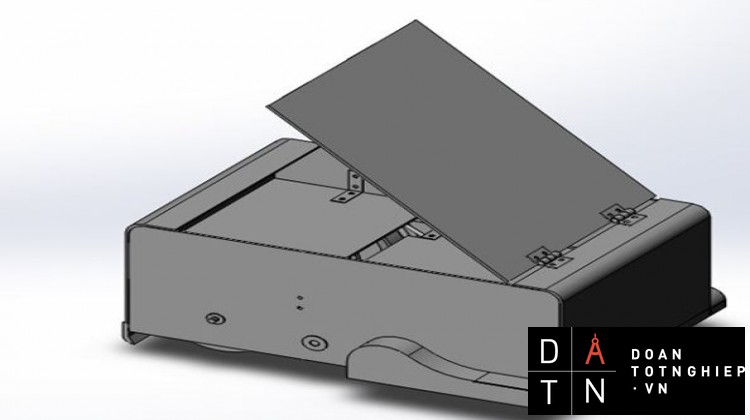
- Nhóm em chọn mẫu xe hình chữ nhật. vì mẫu này thiết kế cơ khí đơn giản, còn thiết kế theo hình tròn thì rất là phức tạp nên nhóm em đã chọn mẫu hình chữ nhật để thực hiện.
- Vật liệu chính để thi công chủ yếu là nhôm tấm và alu
- Sau khi tìm hiểu về kích thước nhôm ngoài thị trường nhóm em đã sử dụng nhôm tấm 24cm x 35cm có độ dày 2.5mm để làm thành robot với kích thước nhôm này vừa đảm bảo được độ vững chắc cho Robot vừa giảm được khối lượng.
-Tấm chắn trước và sau sử dụng alu có thể uốn theo biên dạng của thành hai bên của Robot.
- Sử dụng sử dụng bulông và đai ốc để cố định nhôm.
- Sử dụng nhựa POM trắng đặc để tiện trục lau sàn
- Qua việc chọn vật liệu nhóm đã rút ra được kinh nghiệm là nên chọn loại nhôm có độ dày phù hợp để tránh sự gia tăng trọng lượng ROBOT LAU SÀN không cần thiết và giảm chi phí khi chọn mua nhôm. Nếu muốn tốt thì chọn loại nhôm của Nhật.
- Nên tính toán và sử dụng nhôm trong thiết kế một cách chính xác để tránh sai sót khi cắt nhôm và cũng tiết kiệm được nhôm.
Hình 1.1: Tổng thể cơ khí của xe
Nhóm em phân công ra người đi mua linh kiện, người đi mua động cơ, bình acquy, người đi mua nhôm và các dụng cụ cần thiếc để làm khung xe. Sau khi mua đầy đủ dụng cụ chúng em bắt đầu bắt tay làm, sau hai tuần đã hoàn thiện được khung xe với đầy đủ động cơ, trục lau sàn và bình acquy.
Hình 1.2: Bộ truyền động bánh sau
Hệ thống truyền động sau sử dụng đai tròn, thông qua bộ truyền là bộ giảm tốc chính của xe.(tỷ số truyền 1/ 4,5 vòng).
Hình 1.3: Động cơ chính
Động cơ chính chúng em dùng loại có encoder và không có hộp giảm tốc. Giảm tốc chính của xe chính là thông qua buli và dây đai.
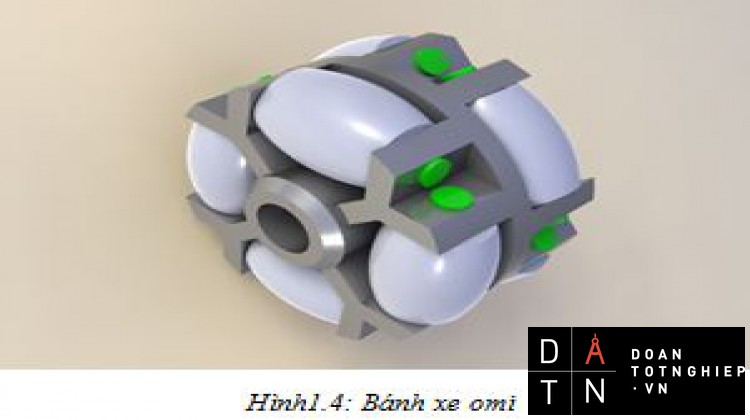
Hình1.4: Bánh xe omi
Phần bánh xe trước , chúng em sử dụng bộ bánh omi, vì bánh omi chuyển động rất linh hoạt , đáp ứng được yêu cầu đưa ra của chúng em. Sử dụng bánh xe omni, với ưu điểm bánh này là có thể quay trái và quay phải dễ dàng nhưng khi lắp vào đế của Robot đòi hỏi tính tỉ mỉ và cẩn thận. Đòi hỏi tính chính xác cao vì khi bắt vào mà bánh trước không bằng với bánh sau thi Robot sẽ bị nghiêng.
Hình 1.5: Động cơ lau sàn
Động cơ dùng để lau sàn, chúng em dùng loại có hộp giảm tốc.
Hình 1.6: Trục lau sàn
Trục lau sàn chúng em làm bằng nhựa pom có đường kính là 30mm, hai đầu được gia công với chiều dài là 20,5mm và đường kính trục là 8mm. Sau đó, chúng em dùng vải dạng sợi lông quấn quanh và kết dính bằng keo dán nhựa PVC.
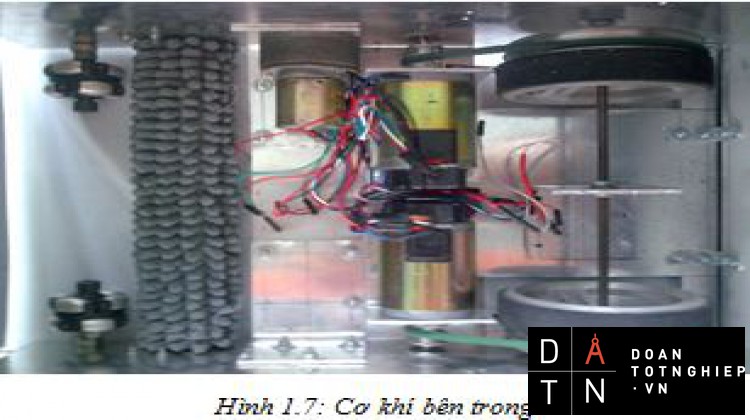
Hình 1.7: Cơ khí bên trong
Phần cơ khí bên trong Robot lau sàn hoàn thiện.
- Bài học kinh nghiệm:
Trong quá trình thiết kế phần cơ khí chúng em đã rút ra được nhiều bài học từ việc chọn vật liệu để làm thân xe cho đến những thứ như bulông, đai ốc, keo nóng (silicon) để có thể hoàn thiện được phần cơ khí.
Hiểu rõ thêm về quy trình làm việc để có thể tạo ra được một sản phẩm cơ khí đúng với ý tưởng mà ta đặt ra.
2. Điện tử :
Để hoàn thành mạch điện tử cần trải qua các bước :
- Dựa vào mạch nguyên lý chuyển sang mạch điện thực tế bằng phần mềm orcad
- In mạch thực tế vào bảng đồng
- Ngâm mạch bằng nước FeCl3
- Khoan lổ chân linh kiện và gắn chân linh kiện vào board mạch
- Hàn chân linh kiện vào bảng đồng
- Kiểm tra lại mạch điện vừa hoàn thành
- Bộ thu sóng RF
Hình 2.1: Bộ thu sóng RF
- Thông số kỹ thuật:
+ Hoạt động điện áp : DC 3 ~ 5V
+ Điều hành hiện tại: ≤ 3 mA (DC 5V)
+ Hoạt động tần số: 315MHz (điểm trên 20 tần số là tùy chọn giữa 260 ~ 440 MHz)
+ Tốc độ: <5 bps K (ở 315 MHz, -95 dBm)
+ Nhiệt độ hoạt động: -20 ° C ~ 70 ° C
- Bộ thu sóng RF được cài địa chỉ trùng với địa chỉ cùa bộ phát sóng RF và bộ thu này ngõ ra có 7 chân, trong đó có 4 chân tín hiệu được kết nối với 4 port của vi điều khiển.
- Việc xác định địa chỉ để cho bộ phát và thu RF hiểu và nhận được tín hiệu thì phải cùng địa chỉ với nhau. Ở mỗi bộ phát và thu đều có tất cả là 8 chân và 3 cách nối khác nhau: nối đất, nối dương và để trống. Như vậy sẽ có tất cả 38 = 6561 cách. Chắc chắn việc trùng địa chỉ với nhau là không thể xảy ra.
- Bộ phát sóng RF
Hình 2.2: Bộ phát sóng RF
- Thông số kỹ thuật:
+ Nguồn cấp: 12V DC (23A Battery)
+ Dòng cấp: 8 – 15mA
+ Tần số hoạt động: 315MHz
+ Công suất phát: 10mW
+ Tầm xa điều khiển: 100m tối đa ( không gian mở)
- Bộ phát song RF có 4 nút Tương ứng với 4 kênh để điều khiển. Nhưng như vậy thì quá ít với mục đích của chúng em. Nên chúng em đã cải tiến bộ phát sóng RF từ 4 kênh thành 8 kênh và được lắp trên gamepad.
.................................
CHƯƠNG 3: KẾT QUẢ VÀ HƯỚNG PHÁT TRIỂN
1.Kết quả:
Sau thời gian nghiên cứu tìm hiểu đề tài và tiến hành thi công đề đồ án tuy gặp không ít khó khăn và trở ngại khi thực hiện đề tài nhưng nhóm cũng đã đạt được kết quả khả quan và đó cũng là động lực để nhóm hoàn thiện đề tài tốt hơn.
- Cơ khí đã đáp ứng được yêu cầu của đề tài.
- Mạch điện – điện tử chạy ổn định.
- Các cơ cấu được hoàn thiện.
- Điều khiển theo đúng yêu cầu của đề tài
- Sau khi nhóm em làm xong đề tài này, nhóm em hiểu biết thêm nhiều về cách làm robot, có kinh nghiệm trong việc thiết kế mạch điện cũng như thiết kế phần cơ khí. Và điều quan trọng hơn là đã giúp cho chúng em rèn luyện được kỹ năng làm theo nhóm, phối hợp với nhau một cách ăn ý để có thể hoàn thành được sản phẩm của chúng em
2.Hạn chế và hướng khắc phục:
Tuy có những kết quả khả quan bước đầu nhưng không ít những thiếu xót dần được hiện ra qua thời gian nhóm thực hiện đề tài :
- Các cơ cấu chưa thật sự chính xác.
- Động cơ chưa hoạt động được tối đa.
- Giải pháp đưa ra chưa thật sự là tối ưu.
- Về cơ khí:vẫn còn sai số giữa các chi tiết .dẫn đến các chi tiết được lắp ghép với nhau chưa thật sự chặt chẽ
- Nhóm chưa có nhiều kinh nghiệm. Mạch sai cũng không biết cách giải quyết nhanh chóng. Chức năng của từng linh kiện chưa nắm rõ hoàn toàn.
- Kinh nghiệm lập trình vẫn còn hạn chế.
Những thiếu xót trên được nhóm tập trung xử lý để tìm ra nguyên nhân từ đó đưa ra các biện pháp khắc phục.
- Về Cơ khí xảy ra do sai số khi làm việc được tập trung sửa chữa sao cho nằm trong giới hạn cho phép của đề tài , để các chi tiết lắp ghép chặt chẽ với nhau
- Tập trung nắm rõ từng linh kiện.tìm hiểu sâu hơn về điện tử để có cách giải quyết nhanh chóng khi mạch sai.
- Cần trao dồi kiến thúc lập trinh sâu hơn.
- Về giải pháp thực hiện được nhóm đưa ra thảo luận và thống nhất.
3.Hướng phát triển:
- Do thời gian, và các yếu tố khác như kiến thức, kinh tế... Nên robot lau sàn chỉ hoạt động trong phạm vi cho phép. Việc phát triển robot hoàn toàn tự động như làm việc theo ý nghĩ của con người. Nhằm phục vụ hoạt động nào đó trong thực tiễn
- Ngoài ra Robot có thể được cải tiến mạnh mẽ hơn thông qua việc điều khiển bằng wifi hoặc nâng cao hơn là xử lý hình ảnh thông qua camera, từ đó Robot lau sàn sẽ được ứng dụng nhiều hơn vào cuộc sống cũng như hỗ trợ cho con người trong công việc vệ sinh ngôi nhà thân yêu của mình.











