ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ ĐIỀU KHIỂN VÀ GIÁM SÁT BĂNG TẢI THÔNG MINH


NỘI DUNG ĐỒ ÁN
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP.HCM
KHOA ĐIỆN - ĐIỆN TỬ
ĐIỀU KHIỂN VÀ GIÁM SÁT BĂNG TẢI THÔNG MINH
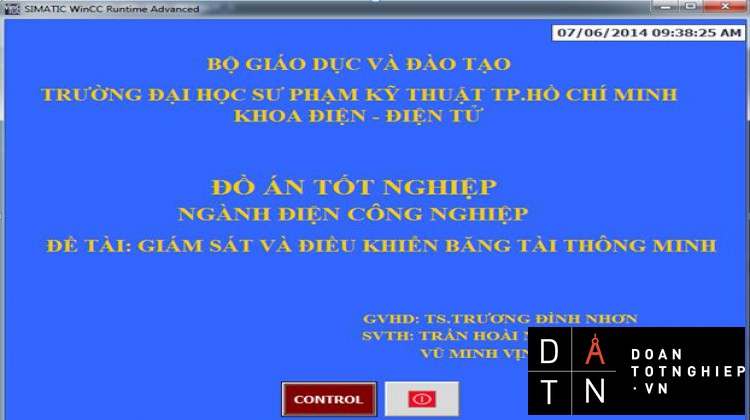
H5.2 Màn hình chính
H5.3 Màn hình giám sát và điều khiển
Mục Lục
|
Chương mở đầu |
…………………………… |
6 |
|
I.Lý do chọn đề tài ………………………………… |
6 |
|
|
II.Mục tiêu đề tài ………………………………… |
6 |
|
|
III.phương pháp nghiên cứu …………………………… |
6 |
|
|
IV.Giá trị thực tiển của đề tài ………………………………… |
7 |
|
|
V.Hướng phát triển ………………………………………… |
7 |
|
|
VI.Lời cảm ơn ……………………………………………… |
7 |
|
|
Chương I Giới thiệu mô hình băng tải thông minh ……………… |
8 |
|
|
1.1 Mô hình tổng thể ……………………………………… |
8 |
|
|
1.2 Chức năng chi tiết …………………………………… |
8 |
|
|
Chương II Giới thiệu PLC S7-1200 ……………………… |
12 |
|
|
2.1 Tổng quan ………………………………………………… |
12 |
|
|
2.2 Cấu tạo phần cứng …………………………………… |
13 |
|
|
2.3 phần mềm lập trình ………………………………… |
17 |
|
|
Chương III Điều khiển động cơ một chiều …………………… |
21 |
|
|
3.1 Đặc tính cơ của động cơ một chiều …………………… |
21 |
|
|
3.2 Điều chỉnh tốc độ động cơ ……………………………… |
22 |
|
|
3.3 Điều khiển tốc độ động cơ một chiều dùng mạch cầu H …… |
27 |
|
|
Chương IV Điều khiển hệ thống băng tải ……………………… |
35 |
|
|
4.1 Yêu cầu điều khiển ……………………………………… |
35 |
|
|
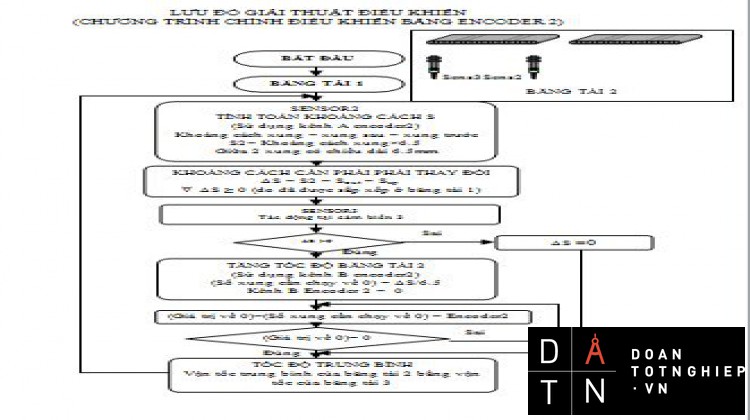
4.2 Lưu đồ giải thuật ……………………………………… |
35 |
|
|
4.3 Chương trình điều khiển ……………………………… |
40 |
|
|
Chương V Màn hình giám sát với WinCC V12 ………………… |
41 |
|
|
5.1 Giới thiệu WinCC V12 ………………………………… |
41 |
|
|
5.2 Các màn hình giám sát và điều khiển băng tải thông minh … |
42 |
|
|
Chương VI Kết luận và hướng phát triển …………………… |
44 |
|
|
6.1 Kết luận ………………………………………………... |
44 |
|
|
6.2 Hướng phát triển ………………………………………… |
44 |
|
|
Tài liệu tham khảo ……………………………………………… |
45 |
|
|
Phụ lục ………………………………………………………... |
46 |
|
CHƯƠNG MỞ ĐẦU
- Lý do chọn đề tài
Sự tiến bộ của khoa học kỹ thuật và sự phát triển mạnh mẽ của kỹ thuật máy tính đã cho ra đời các thiết bị điều khiển số như CNC, PLC… các thiết bị này cho phép khắc phục được rất nhiều các nhược điểm của hệ thống điều khiển trước đó và đáp ứng được yêu cầu về kinh tế và kỹ thuật trong sản xuất.
Với sự phát triển của khoa học công nghệ như hiện nay thì việc ứng dụng thiết bị logic khả trình PLC để tự động hoá quá trình sản xuất, nhằm mục tiêu tăng năng suất lao động, giảm sức người, nâng cao chất lượng sản phẩm đang là một vấn đề cấp thiết và có tính thời sự cao.
Luận văn với đề tài: “Điều khiển và giám sát băng tải thông minh” nhằm mục đích tìm hiểu nghiên cứu ứng dụng của bộ điều khiển PLC S7-1200 của hãng SIEMENS trong tự động hóa dây chuyền sản xuất.
- Mục tiêu đề tài
- Nghiên cứu cấu trúc và phần mềm lập trình cho PLC S7-1200.
- Ứng dụng điều khiển băng tải sắp xếp vỏ hộp sản phẩm, phục vụ cho việc nạp sản phẩm và đóng kiện.
- Giám sát quá trình sản xuất bằng màn hình HMI.
- Phương pháp nguyên cứu
Thu thập, nghiên cứu tài liệu liên quan.
Thu thập và tính toán hệ thống truyền động trên mô hình thực tế.
- Giá trị thực tiễn của đề tài.
- Ứng dụng vào dây chuyền chiết nạp và đóng hộp tự động các sản phẩm trong lĩnh vực công nghiệp thực phẩm.
- Hướng phát triển
- Hệ thống băng tải thông minh giúp vừa vận chuyển, vừa sắp xếp vỏ hộp sản phẩm, nhờ đó việc chiết nạp và đóng kiện diễn ra dễ dàng và nhanh chóng hơn, vì vậy có thể nghiên cứu phát triển mô hình thành hệ thống thực tế ứng dụng vào dây chuyền sản xuất.
- Lời cảm ơn
Trong quá trình tiến hành làm luận văn, mặc dù được sự hướng dẫn tận tình của giáo viên hướng dẫn T.S. Trương Đình Nhơn và bản thân tác giả cũng đã cố gắng tham khảo tài liệu và tìm hiểu thực tế, nhưng do thời gian và kinh nghiệm còn hạn chế nên luận văn không thể tránh khỏi những thiếu sót. Tác giả rất mong nhận được những ý kiến đóng góp và nhận xét đánh giá quí báu của các thầy cô và các bạn đồng nghiệp để luận văn được hoàn thiện hơn.
Các tác giả xin chân thành cảm ơn sự hướng dẫn tận tình và chu đáo của giáo viên hướng dẫn T.S. Trương Đình Nhơn đã giúp đỡ rất nhiều để hoàn thành được đề tài này.
CHƯƠNG I. GIỚI THIỆU MÔ HÌNH BĂNG TẢI THÔNG MINH
1.1. Mô hình tổng thể:
Băng tải có kích thước 1800 x 100 được cấu thành từ ba đoạn băng tải nhỏ 600 x 100. Điều khiển chạy băng tải là ba động cơ một chiều loại nhỏ có phần cảm là nam châm vĩnh cữu. Các cảm biến dùng trong hệ thống là cảm biến quang và tiệm cận.
H1.1 Mô hình băng tải
1.2. Chức năng chi tiết:
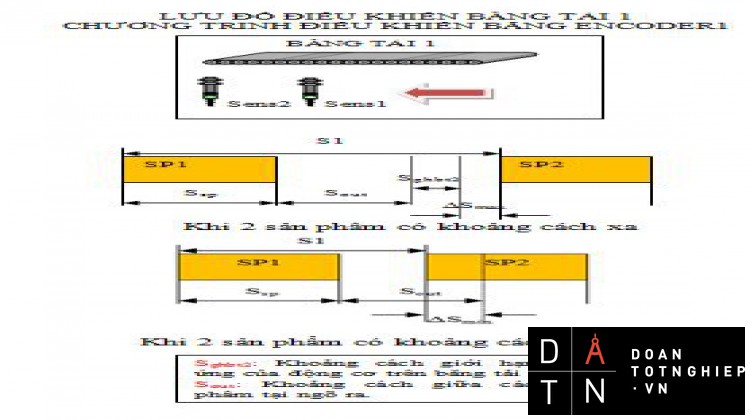
+ Đoạn băng tải đầunhư trình bày trong hình H1.2: Điều khiển cấp một khoảng cách các vỏ hộp.
H1.2 Băng tải đầu
+ Đoạn băng tải giữađược trình bày trong hình H1.3: Điều khiển cấp hai khoảng cách các vỏ hộp.
H1.3Băng tải giữa
+ Đoạn băng tải cuốinhư trình bày trong hình H1.4: Vận chuyển vỏ hộp sau khi được sắp xếp.
H1.4Băng tải cuối
+ Các loại cảm biến:
Trong đề tài, cảm biến quang và cảm biến tiệm cận được sử dụng. Với thông số chi tiết được cho ở bảng B1.1.
B1.1 Thông số cảm biến
|
Cảm biến tiệm cận
|
Ngõ ra PNP-NO |
Có mạch bảo vệ nối ngược cực nguồn, bảo vệ quá dòng, quá áp. Kiểm tra trạng thái hoạt động bởi chỉ thị LED Đỏ. Cấu trúc chống thấm nước IP67. Nguồn cấp: 12-24 VDC Tần số đáp ứng: 200-500 Hz
|
+ Động cơ DC:
Động cơ truyền động trong đề tài là động cơ DC có thông số chi tiết trong bảng B1.2.
B1.2 Thông số động cơ
|
TG-57A TSUKASA Công suất 8.2W Điện áp 24V Tốc độ định mức 6800 rpm Mô men định mức 11.8 mN-m |
CHƯƠNG II. GIỚI THIỆU PLC S7-1200
2.1. Tổng quan:
S7-1200 ra đời năm 2009 dùng để thay thế dần cho S7-200. So với S7-200 thì S7-1200 có những tính năng nổi trội hơn như:
- Thiết kế nhỏ gọn, chi phí thấp, và một tập lệnh mạnh giúp những giải pháp hoàn hảo hơn cho ứng dụng sử dụng với S7-1200.
- Có một cổng PROFINET, hỗ trợ chuẩn Ethernet và TCP/IP.
Các thành phần S7-1200 bao gồm:
- 3 bộ điều khiển nhỏ gọn với sự phân loại trong các phiên bản khác nhau giống như điều khiển AC hoặc DC phạm vi rộng.
- 2 mạch tương tự và số mở rộng điều khiển mô-đun trực tiếp trên CPU làm giảm chi phí sản phẩm.
- 13 module tín hiệu số và tương tự khác nhau.
- 2 module giao tiếp RS232/RS485 để giao tiếp thông qua kết nối PTP
- Bổ sung 4 cổng Ethernet- Module nguồn PS 1207 ổn định, dòng điện áp 115/230 VAC và điện áp 24 VDC.
H2.1 So sánh giữa PLC S7-1200 và S7-200 về các module mở rộng
2.2 Cấu tạo phần cứng:
S7-1200 có 3 dòng là CPU 1211C, CPU 1212C và 1214C.
H2.2 Các khối chức năng CPU S7-1200
S7-1200 được trang bị thêm tính năng bảo mật giúp bảo vệ quyền truy cập vào cả CPU và chương trình điều khiển.
- Các đặc tính của CPU S7-1200 được thể hiện trong bảng sau:
B2.1 Đặc tính của PLC S7-1200
Module mở rộng:
H2.3 Module mở rộng PLC S7-1200
PLC S7-1200 có thể mở rộng các module tín hiệu và các module gắn ngoài để mở rộng chức năng của CPU. Ngoài ra, có thể cài đặt thêm các module truyền thông để hỗ trợ giao thức truyền thông khác.
Khả năng mở rộng của từng loại CPU tùy thuộc vào các đặc tính, thông số và quy định của nhà sản xuất.
S7-1200 có các loại module mở rộng sau:
- Communication module (CP).
- Signal board (SB)
- Signal Module (SM)
- Các đặc tính của module mở rộng được trình bày ở bảng B2.2
B2.2Các đặc tính của module mở rộng
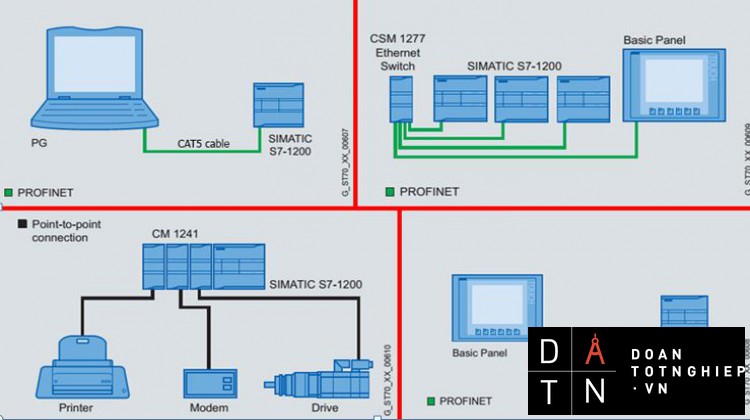
- Giao tiếp
S7-1200 hỗ trợ kết nối Profibus và kết nối PTP (point to point).
Giao tiếp PROFINET với:
- Các thiết bị lập trình
- Thiết bị HMI
- Các bộ điều khiển SIMATIC khác
Hỗ trợ các giao thức kết nối:
- TCP/IP
- SIO-on-TCP
- Giao tiếp với S7
H2.4 Các kết nối của PLC S7-1200
2.3 Phần mềm lập trình
- Phần mềm dùng để lập trình cho S7-1200 là Step7 Basic. Step7 Basic hỗ trợ ba ngôn ngữ lập trình là FBD, LAD và SCL. Phần mềm này được tích hợp trong TIA Portal 12 của Siemens.
Được thiết kế với giao diện thân thiện người sử dụng, TIA Portal thích hợp cho cả những người mới lẫn những người nhiều kinh nghiệm trong lập trình tự động hóa. Là phần mềm cơ sở cho các phần mềm dùng để lập trình, cấu hình, tích hợp các thiết bị trong dải sản phẩm Tích hợp tự động hóa toàn diện (TIA) của Siemens. Ví dụ như phầm mềm mới Simatic Step 7 V12 để lập trình các bộ điều khiển Simatic, Simatic WinCC V12 để cấu hình các màn hình HMI và chạy Scada trên máy tính.
H2.5 Phần mềm TIA Portal
Để thiết kế TIA portal, Siemens đã nghiên cứu rất nhiều các phần mềm ứng dụng điển hình trong tự động hóa qua nhiều năm, nhằm mục đích hiểu rõ nhu cầu của khách hàng trên toàn thế giới. Là phần mềm cơ sở để tích hợp các phần mềm lập trình của Siemens lại với nhau, TIA Portal giúp cho các phần mềm này chia sẽ cùng một cơ sở dữ liệu, tạo nên sự thống nhất trong giao diện và tính toàn vẹn cho ứng dụng. Ví dụ, tất cả các thiết bị và mạng truyền thông bây giờ đã có thể được cấu hình trên cùng một cửa sổ. Hướng ứng dụng, các khái niệm về thư viện, quản lý dữ liệu, lưu trữ dự án, chẩn đoán lỗi, các tính năng online là những đặc điểm rất có ích cho người sử dụng khi sử dụng chung cơ sở dữ liệu TIA Portal.
Tất cả các bộ đều khiển PLC, màn hình HMI, các bộ truyền động của Siemens đều được lập trình, cấu hình trên TIA portal. Việc này giúp giảm thời gian, công sức trong việc thiết lập truyền thông giữa các thiết bị này. Ví dụ người sử dụng có thể sử dụng tính năng “kéo và thả’ một biến của trong chương trình điều khiển PLC vào một màn hình của chương trình HMI. Biến này sẽ được gán vào chương trình HMI và sự kết nối giữa PLC – HMI đã được tự động thiết lập, không cần bất cứ sự cấu hình nào thêm. Phần mềm mới Simatic Step 7 V12, tích hợp trên TIA Portal, để lập trình cho S7-1200, S7-300, S7-400 và hệ thống tự động PC-based Simatic WinAC. Simatic Step 7 V12 được chia thành các module khác nhau, tùy theo nhu cầu của người sử dụng. Simatic Step 7 V12 cũng hỗ trợ tính năng chuyển đổi chương trình PLC, HMI đang sử dụng sang chương trình mới trên TIA Portal. Phần mềm mới Simatic WinCC V12, cũng được tích hợp trên TIA Portal, dùng để cấu hình cho các màn hình TP và MP hiện tại, màn hình mới Comfort, cũng như để giám sát điều khiển hệ thống trên máy tính (SCADA).
Việc thiết lập, cấu hình cho các Sinamics biến tần cũng sẽ được tích hợp vào TIA Portal.
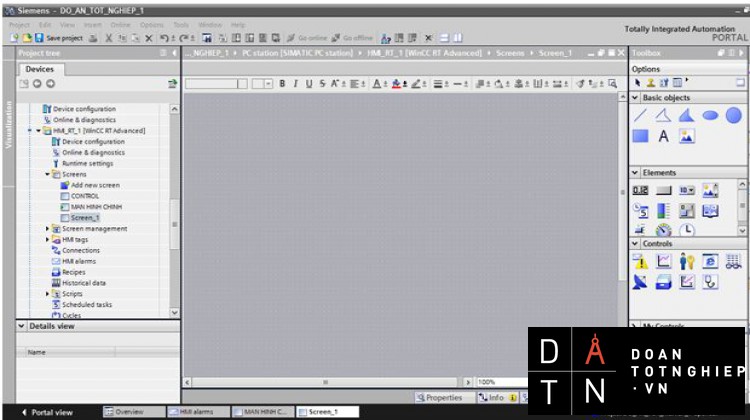
H2.6 Giao diện project của TIA Portal V12
H2.7 Giao diện lập trình của TIA Portal V12
CHƯƠNG III. ĐIỀU KHIỂN ĐỘNG CƠ MỘT CHIỀU
3.1. Đặc tính cơ của động cơ điện một chiều:
Tùy theo cách kích từ, động cơ điện một chiều có những tính năng khác nhau biểu diễn bằng các đường đặc tính làm việc, đặc tính cơ khác nhau.
Trong các đặc tính đó, quan trọng nhất là đặc tính cơ. Đặc tính cơ dùng để xác định điểm làm việc xác lập hoặc là khảo sát điểm làm việc ổn định trong hệ thống truyền động điện.
Đặc tính cơ của động cơ điện là mặt phẳng tọa độ giữa ω với momen
ω = f(M).
Trong đồ án thiết kế này ta chỉ quan tâm tới loại động cơ một chiều kích từ độc lập.
H3.1 Sơ đồ nguyên lý
Khi động cơ làm việc, rôto mang cuộn ứng quay trong từ trường của cuộn cảm nên trong cuộn ứng lại xuất hiện một sức phản điện động có chiều ngược với điện áp đặt vào phần ứng động cơ.
Phương trình đặc tính cơ:
Trong đó:
+ Uư : điện áp phần ứng ( V )
+ Rư : điện trở của mạch phần ứng (Ω)
+ Rf: điện trở phụ của mạch phần ứng
+ Φ: từ thông qua một cực từ (Wb)
+ k = hệ số cấu tạo của động cơ
+ Φ: từ thông qua một cực từ (Wb)
+ ω: tốc độ góc của rôto
+ p: số đôi cực từ chính
+ N: số thanh dẫn tác dụng của cuộn dây phần ứng
+ a: số đôi mạch nhánh song song
+M mômen cơ
3.2 Điều chỉnh tốc độ động cơ:
Về việc điều chỉnh tốc độ, động cơ một chiều có nhiều ưu điểm so với các loại động cơ khác: điều chỉnh dễ dàng, chất lượng điều chỉnh cao trong một dải rộng….
Xét phương trình đặc tính cơ của động cơ điện một chiều ở trên, ta cócác phương pháp điều khiển tốc độ như sau:
Phương pháp 1: Thay đổi điện trở phần ứng
Đây là phương pháp kinh điển dùng để điều khiển tốc độ động cơ trong nhiều năm.
+ Nguyên lý điều khiển
Trong phương pháp này người ta giữ U = Uđm; Φ = Φđm và nối thêm điện trở phụ vào mạch phần ứng để tăng điện trở phần ứng.
Độ cứng của đường đặc tính cơ:
Ta thấy khi điện trở càng lớn thì β càng nhỏ nghĩa là đặc tính cơ càng dốc và do đó càng mềm hơn.
H3.2Đặc tính cơ của động cơ khi thay đổi điện trở phụ
Ứng với Rf = 0 ta có độ cứng tự nhiên βTN có giá trị lớn nhất nên đặc tính cơ tự nhiên có độ cứng lớn hơn tất cả các đường đặc tính cơ có điện trở phụ.
Như vậy, khi ta thay đổi Rf ta được một họ đặc tính cơ thấp hơn đặc tính cơ tự nhiên.
+ Đặc điểm của phương pháp
Điện trở mạch phần ứng càng tăng thì độ dốc đặc tính càng lớn, đặc tínhcơ càng mềm, độ ổn định tốc độ càng kém và sai số tốc độ càng lớn.
Phương pháp này chỉ cho phép điều chỉnh tốc độ trong vùng dưới tốc độ
định mức ( chỉ cho phép thay đổi tốc độ về phía giảm).
Chỉ áp dụng cho động cơ điện có công suất nhỏ, vì tổn hao năng lượng
trên điện trở phụ làm giảm hiệu suất của động cơ và trên thực tế thường dùng ởđộng cơ điện trong cần trục.
+ Đánh giá các chỉ tiêu
Tính liên tục: phương pháp này không thể điều khiển liên tục được màphải điều khiển nhảy cấp.
Dải điều chỉnh phụ thuộc vào chỉ số mômen tải. Tải càng nhỏ thì dải điềuchỉnh D = ωmax / ωmin càng nhỏ. Phương pháp này có thể điều chỉnh trong dải D= 3 : 1
Giá thành đầu tư ban đầu rẻ nhưng không kinh tế do tổn hao trên điện trởphụ lớn.
Chất lượng không cao dù điều khiển rất đơn giản.
Phương pháp 2: Thay đổi từ thông Φ
+ Nguyên lý điều khiển
Giả thiết U= Uđm; Rư = const . Muốn thay đổi từ thông động cơ ta thay đổidòng điện kích từ.Thay đổi dòng điện trong mạch kích từ bằng cách nối nối tiếp biến trởvào mạch kích từ hay thay đổi điện áp cấp cho mạch kích từ.
Bình thường động cơ làm việc ở chế độ định mức với kích thích tối đa (Φ= Φmax) mà phương pháp này chỉ cho phép tăng điện trở vào mạch kích từ nênchỉ có thể điều chỉnh theo hướng giảm từ thông Φ tức là điều chỉnh tốc độ trongvùng trên tốc độ định mức.
→ Khi giảm Φ thì tốc độ không tải lý tưởng ω0=Uđm/kΦ tăng, còn độcứng đặc tính cơ β = −(kΦ)2/Rư giảm, tathu được họ đặc tính cơ nằm trên đặc tính cơ tự nhiên.
H3.3 Đặc tính cơ của động cơ khi giảm từ thông
Khi tăng tốc độ động cơ bằng cách giảm từ thông thì dòng điện tăng vàtăng vượt quá mức giá trị cho phép nếu mômen không đổi. Vì vậy muốn giữ cho dòng điện không vượt quá giá trị cho phép đồng thời với việc giảm từ thông thì ta phải giảm Mt theo cùng tỉ lệ.
+ Đặc điểm của phương pháp
Phương pháp này có thể thay đổi tốc độ về phía tăng.
Phương pháp này chỉ điều khiển ở vùng tải không quá lớn so với định mức.
Việc thay đổi từ thông không làm thay đổi dòng điện ngắn mạch.
Việc điều chỉnh tốc độ bằng cách thay đổi từ thông là phương pháp điềukhiển với công suất không đổi.
+ Đánh giá các chỉ tiêu điều khiển
Sai số tốc độ lớn: đặc tính điều khiển nằm trên và dốc hơn đặc tính tựnhiên.
Dải điều khiển phụ thuộc vào phần cơ của máy. Có thể điều khiển trơntrong dải điều chỉnh D = 3 :1
Tính liên tục: vì công suất của cuộn dây kích từ bé, dòng điện kích từ nhỏnên ta có thể điều khiển liên tục với Φ ≈ 1
Phương pháp này được áp dụng tương đối phổ biến, có thể thay đổi liêntục và kinh tế ( vì việc điều chỉnh tốc độ thực hiện ở mạch kích từ với dòng kích từ = (1 – 10)%Iđm của phần ứng nên tổn hao điều chỉnh thấp).
→ Đây là phương pháp gần như là duy nhất đối với động cơ điện một chiều khi cần điều chỉnh tốc độ lớn hơn tốc độ điều khiển.
Phương pháp 3: Điều chỉnh tốc độ bằng cách thay đổi điện áp.
+ Nguyên lý làm việc
Để điều chỉnh điện áp phần ứng động cơ một chiều cần có thiết bị Driver.
H3.4Đặc tính cơ của động cơ khi thay đổi điện áp
Ở phương pháp này: U = var; Φđm = const; Rf = 0.
Khi thay đổi phần ứng ( thay đổi theo chiều giảm điện áp), vì từ thông của động cơ được giữ không đổi nên độ cứng đặc tính cơ cũng không đổi, còn tốc độkhông tải lí tưởng ωo = U /k.Φ thay đổi tùy thuộc vào giá trị điện áp phần ứng.
Do đó ta thu được họ đặc tính mới song song và thấp hơn đặc tính cơ tựnhiên tức là vùng điều khiển tốc độ nằm dưới tốc độ định mức.
+ Đặc điểm của phương pháp
Điện áp phần ứng càng giảm, tốc độ động cơ càng thấp.
Điều chỉnh trơn trong toàn bộ dải điều chỉnh.
Độ cứng đặc tính cơ cao và được giữ không đổi trong toàn dải điều chỉnh.
Chỉ thay đổi tốc độ về phía giảm
Rất dễ tự động hóa khi dùng chỉnh lưu có điều khiển.
Phương pháp này điều khiển với mômen không đổi vì Φ và Iư đều không
đổi.
+ Đánh giá chi tiêu điều khiển
Sai số tốc độ lớn ( sai số tốc độ bằng sai số tốc độ của đặc tính cơ tự
nhiên)
Tính liên tục: điện áp của động cơ được điều khiển bằng bộ biến đổi. Các
bộ biến đổi hiện nay đều có công suất bé nên có thể điều chỉnh liên tục.
Dải điều chỉnh có thể đạt được D = 10:1
→ Đây là phương pháp duy nhất có thể điều chỉnh liên tục tốc độ động cơ trong vùng tốc độ thấp hơn tốc độ định mức đối với động cơ một chiều.
⇒ Qua việc xét ba phương pháp điều chỉnh tốc độ động cơ ta thấy phương pháp điều chỉnh điện áp phần ứng là triệt để và có nhiều ưu điểm hơn cảnên ta chọn phương pháp này để điều khiển tốc độ động cơ điện một chiều.
3.3 Điều khiển tốc độ động cơ một chiều dùng mạch cầu H:
+ Giới thiệu về mạch cầu H
Mạch được gọi là mạch cầu H vì nó được cấu tạo bởi 4 transitor hay là Fet. Đôi khi mạch cầu H cũng được cấu tạo bởi 2 transitor hay Fet.
Tác dụng của transitor và Fet là các van đóng mở dẫn dòng điện từ nguồn xuống tải với công suất lớn. Tìn hiệu điều khiển các van là tín hiệu nhỏ (điện áp hay dòng điện) và cho dẫn dòng và điện áp lớn để cung cấp cho tải.
Tín hiệu điều khiển là tín hiệu đầu ra của vi điều khiển là nhỏ hơn 5V (do các điều chế PWM) mà điều khiển động cơ cần dòng điện và điện áp lớn. Các van điều khiển hay các chân điều khiển chỉ cần tín hiệu nhỏ (Điện áp hay dòng điện) là mở khóa (Transitor) dẫn dòng cho tải.
Mạch cầu H có thể đảo chiều dòng điện qua tải nên thế nó hay được dùng trong các mạch điều khiển động cơ DC và các mạch băm áp. Đối với mạch điều khiển động cơ thì mạch cầu H có thể đảo chiều động cơ đơn giản. Chỉ cần mở khóa các van đúng chiều mà mình muốn.
+ Các dạng của mạch cầu H
Mạch cầu H được cấu tạo bởi 3 dạng chính:
-Dạng 1
Được cấu tạo bởi 4 transitor (Fet) Cùng kênh N.Nguyên lý mạch được cấu tạo như sau (dùng transitor để mình họa)
H3.5 Sơ đồ nguyến lý mạch cầu H dùng Transistor
Đối với dạng này thì được cấu tạo bởi các transitor cùng kênh N. và chỉ cần 2 tín hiệu điều khiển kích mở các transitor
-Dang 2
Được cấu tạo bởi 2 cặp đôi transitor P,N hay FET (Thuận Ngược). Sơ đồ nguyên lý cấu tạo của nó được cấu tạo như sau
H3.6Sơ đồ nguyên lý mạch cầu H dùng Transistor P,N hay FET
Đối với thiết kế này quả là thấy khá là ổn định .Và như thế chúng ta sẽ thấy là cần 4 tín hiệu điều khiển nhưng trong thực tế mình chỉ cần 2 tín hiệu điều khiển đã có thể điều khiển được. Cho nên kiểu dạng 2 này được sử dụng nhiều trong lĩnh vực điều khiển hơn.
-Dạng 3
Mạch cầu H dùng Rơle:Là một dạng “công tắc”(switch) cơ điện (electrical mechanical device),chúng gồm các tiếp điểm cơ được điều khiển đóng mở bằng dòng điện .Với khả năng đóng mở các tiếp điểm ,rơ le đúng là một lựa chọn tốt để làm khóa cho mạch cầu H.Thêm nữa chúng lại được điều khiển bằng tín hiệu điện,Nghĩa là chúng ta có thể dùng AVR (hay bất kỳ chip điều khiển nào) để điều khiển Rowle, qua đó điêu khiển mạch cầu H.
H3.7 Cấu tạo và hình dáng của rơle thông dụng
+ Nguyên tắc hoạt động chung của mạch cầu H
Trong hình 1, hãy xem 2 đầu Vvà GND là 2 đầu (+) và (-) của ắc quy, “đối tượng” là động cơ DC mà chúng ta cần điều khiển , “đối tượng” này có 2 đầu A và B, mục đích điều khiển là cho phép dòng điện qua “đối tượng” theo chiều A đến B hoặc B đến A.Thành phần chính tạo nên mạch cầu H chính là 4 “khóa” L1.L2,R1 VÀ R2(L:Left,R:Right). Ở điều kiện bình thường 4 khóa này “mở”,mạch cầu H không hoạt động.Tiếp theo ta khảo sát hoạt động của mạch cầu H thông qua các hình minh họa 1.11a và 1.11b
H3.8Nguyên lý hoạt động mạch cầu H
Giả sử bằng cách nào đó mà 2 khóa L1 và R2 được “đóng lại” (L1 và R1 vẫn mở), dễ dàng hình dung có một dòng điện chạy từ V qua khóa L1 đến đầu A và xuyên qua đối tượng đến đầu B của nó trước khi qua R2 và vè GND (Như hình 1.11a).Như thế, với giả sử này sẽ có dòng điện chạy qua đối tượng theo chiều từ A đến B.Bây giờ hãy giả sử khác đi rằng R1 và L2 đóng trong khi L1 và R2 mở ,dòng điện lại xuất hiện và lần này nó sẽ chạy qua đối tượng theo chiều từ B đến A như trong hình 1.11b (V->R1->A->L2->GND).Vậy là đã rõ chúng ta có thể dung mạch cầu H để đảo chiều dòng điện qua một “đối tượng”(hay cụ thể là đảo chiều động cơ)
+Ưu nhược điểm của cầu H
- Ưu điểm : Sử dụng cầu H làm cho mạch trở nên đơn giản hơn và chỉ cần 1 nguồn điện.
- Nhược điểm : Nếu như mạch điều khiển cùng bật 2 công tắc ở cùng 1 nửa cầu thì mạch động lực của chúng ta bị ngắn mạch nguồn. Nếu hiện tượng xảy ra trong 1 thời gian ngắn (quá độ ) sẽ xuất hiện dòng trùng dẫn qua van công suất làm tăng công suất tiêu tán trên van. Nếu thời gian trùng dẫn đủ dài, dòng trùng dẫn sẽ lớn làm cháy van công suất.
+ Giới thiệu về phương pháp PWM
Phương pháp điều chế PWM có tên tiếng anh là Pulse Width Modulation là phương pháp điều chỉnh điện áp ra tải hay nói cách khác là phương pháp điều chế dựa trên sự thay đổi độ rộng của chuỗi xung vuông dẫn đến sự thay đổi điện áp ra.
Sử dụng PWM điều khiển nhanh chậm của động cơ hay cao hơn nữa nó còn được dùng để điều khiển ổn định tốc độ động cơ. Ngoài lĩnh vực điều khiển hay ổn định tải thì PWM nó còn tham gia và điều chế các mạch nguồn như là : boot, buck, nghịch lưu 1 pha và 3 pha...PWM chúng ta còn gặp nhiều trong thực tế và các mạch điện điều khiển. Điều đặc biệt là PWM chuyên dùng để điều khiển các phần tử điện tử công suất có đường đặc tính là tuyến tính khi có sẵn 1 nguồn 1 chiều cố định.
Các PWM khi biến đổi thì có cùng 1 tần số và khác nhau về độ rộng của sườn dương hoặc là sườn âm.
H3.9Đồ thị dạng xung điều chế PWM
Sơ đồ trên là dạng xung điều chế trong 1 chu kì thì thời gian xung lên (sườn dương) nó thay đổi dãn ra hoặc co vào. Và độ rộng của nó được tính bằng phần trăm tức là độ rộng của nó được tính như sau :
độrộng = (t1/T).100(%). Như vậy thời gian xung lên càng lớn trong 1 chu kì thì điện áp đầu ra sẽ càng lớn. Nhìn trên hình vẽ trên thì ta tính được điện áp ra tải sẽ là :
+Đối với PWM = 25% ==> Ut = Umax.(t1/T) = Umax.25% (V)
+Đối với PWM = 50% ==> Ut = Umax.50% (V)
+Đối với PWM = 75% ==> Ut = Umax.75% (V)
Cứ như thế ta tính được điện áp đầu ra tải với bất kì độ rộng xung nào.
+ Nguyên lý của phương pháp PWM
Đây là phương pháp được thực hiện theo nguyên tắc đóng ngắt nguồn tới tải và một cách có chu kì theo luật điều chỉnh thời gian đóng cắt. Phần tử thực hiện nhiện vụ đó trong mạch các van bán dẫn.
Xét hoạt động đóng cắt của một van bán dẫn. Dùng van đóng cắt bằng Mosfet.
CHƯƠNG VI. KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
6.1 Kết luận
Luận văn hoàn thành với những nội dung đã được nghiên cứu như sau:
- Tìm hiểu công nghệ tự động hóa dây chuyền sản xuất.
-Nghiên cứu các đặc điểm chính của thiết bị khả trình PLC nhằm phục vụ cho các hệ thống tự động điều khiển trong dân dụng và công nghiệp.
-Xây dựng thuật toán cho việc điều khiển băng tải thông minh.
-Tìm hiểu phần mềm WinCC và xây dựng các giao diện điều khiển.
6.2 Hướng phát triển
- Thay thế hệ thống động cơ truyền động cho băng tải bằng động cơ Servo để tăng độ chính xác.
-Hoàn thiện hệ thống thu thập dữ liệu trong quá trình sản xuất nhằm nâng cao khả năng tự động điều khiển vào đo lường của nhà máy.
TÀI LIỆU THAM KHẢO
[1] SIMATIC TIA Portal STEP 7 BASIC V12
[2] SIMATIC S7-1200 System Manual
[3] S7-1200 Getting_Started
[4] WINCC Advanced V12
[5] Thiết kế tính toán thiết bị điều khiển - Trần Văn Thịnh
[6] Cơ sở điều khiển tự động truyền động điện - TS. Trần Thọ
[7] Máy điện và mạch điều khiển - Nguyễn Trọng Thắng
[8] Điện tử công suất - Hoàng Ngọc Văn









