ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ PHƯƠNG PHÁP ĐIỀU KHIỂN ON-OFF, PI VÀ ĐIỀU KHIỂN PID THÔNG QUA CARD AD GIAO TIẾP VỚI MÁY TÍNH PCL818

NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ PHƯƠNG PHÁP ĐIỀU KHIỂN ON-OFF, PI VÀ ĐIỀU KHIỂN PID THÔNG QUA CARD AD GIAO TIẾP VỚI MÁY TÍNH PCL818, PI VÀ ĐIỀU KHIỂN PID THÔNG QUA CARD AD GIAO TIẾP VỚI MÁY TÍNH PCL818
LỜI NÓI ĐẦU
Như chúng ta biết, nhiệt độ là một trong những thành phần vật lý rất quan trọng. Việc thay đổi nhiệt độ của một vật chất ảnh hưởng rất nhiều đến cấu tạo, tính chất, và các đại lượng vật lý khác của vật chất. Ví dụ, sự thay đổi nhiệt độ của 1 chất khí sẽ làm thay đổi thể tích, áp suất của chất khí trong bình. Vì vậy, trong nghiên cứu khoa học, trong công nghiệp và trong đời sống sinh hoạt, thu thập các thông số và điều khiển nhiệt độ là điều rất cần thiết.
Trong các lò nhiệt, máy điều hoà, máy lạnh hay cả trong lò viba, điều khiển nhiệt độ là tính chất quyết định cho sản phảm ấy. Trong ngành luyện kim, cần phải đạt đến một nhiệt độ nào đó để kim loại nóng chảy, và cũng cần đạt một nhiệt độ nào đó để ủ kim loại nhằm đạt được tốt các đặc tính cơ học như độ bền, độ dẻo, độ chống gỉ sét, … . Trong ngành thực phẩm, cần duy trì một nhiệt độ nào đó để nướng bánh, để nấu, để bảo quản, … . Việc thay đổi thất thường nhiệt độ, không chỉ gây hư hại đến chính thiết bị đang hoạt động, còn ảnh hưởng đến quá trình sản xuất, ngay cả trên chính sản phẩm ấy.
Có nhiều phương pháp để điều khiển lò nhiệt độ. Mỗi phương pháp đều mang đến 1 kết quả khác nhau thông qua những phương pháp điều khiển khác nhau đó. Trong nội dung luận văn này, sẽ cho ta phương pháp điều khiển On-Off , PI và điều khiển PID thông qua Card AD giao tiếp với máy tính PCL818. Mọi dữ liệu trong quá trình điều khiển sẽ được hiển thị lên máy tính dựa trên ngôn ngữ lập trình Delphi.
MỤC LỤC
Phần 1. LÝ THUYẾT........................................... 7
Chương 1. Các khối cơ bản trong điều khiển nhiệt độ................ 8
Chương 2. Nhiệt độ – Các loại cảm biến nhiệt độ..................... 11
1. Nhiệt độvà các thang đo nhiệt độ............................................... 12
2. Các loại cảm biết nhiệt độ hiện tại.............................................. 13
2.1. Thermocouple......................................................................... 13
2.2. RTD........................................................................................ 13
2.3. Thermistor.............................................................................. 14
2.4. IC cảm biến............................................................................. 14
3. Thermocouple và hiệu ứng Seebeck........................................... 15
3.1. Hiệu ứng Seebeck.................................................................... 15
3.2. Quá trình dẫn điện trong Thermocouple................................. 15
3.3. Cách đo hiệu điện thế.............................................................. 17
3.4. Bù nhiệt của môi trường ......................................................... 19
3.5. Các loại Thermocouple .......................................................... 20
3.4. Một số nhiệt độ chuẩn ............................................................ 21
Chương 3. Các phương pháp biến đổi AD
Card PCL-818 của Advantech.................................. 22
1. Sơ lược các phương pháp biến đổi AD...................................... 22
1.1. Biến đổi AD dùng bộ biến đổi DA.......................................... 22
1.2. Bộ biến đổi Flash-AD............................................................. 26
1.3. Bộ biến đổi AD theo hàm dốc dạng lên xuống........................ 27
1.4. Bộ biến đổi AD dùng chuyển đổi áp sang tần số.................... 27
1.5. Bộ biến đổi AD theo tích phân 2 độ dốc................................. 28
2. Card AD - PCL818 của hãng Advantech................................. 29
2.1. Các thanh ghi của Card........................................................... 29
2.2. Chuyển đổi A/D , D/A , D/I , D/O .......................................... 41
Chương 4. Các phương pháp điều khiển
Phương pháp PID số .................................................. 44
1. Các phương pháp điều khiển..................................................... 44
1.1 Điều khiển On - Off.................................................................. 44
1.2. Điều khiển bằng khâu tỷ lệ...................................................... 45
1.3. Điều khiển bằng khâu vi phân tỷ lệ PD................................... 46
1.2. Điều khiển bằng khâu vi tích phân tỷ lệ PID .......................... 47
2. Phương pháp điều khiển PID số................................................. 49
3. Thiết kế PID số ........................................................................... 51
4. Điều khiển PID trong hệ thống điều khiển nhiệt độ ................. 52
Chương 5. Các Loại Mạch Kích Và Solid State Relay ( SSR )
........................................................................................................... 56
1. Đóng ngắt bằng OpTo - Triac ................................................... 56
2. Contactor Quang – Solid State Relay........................................ 58
Chương 6 . Các loại IC khác........................................................... 60
1. IC Khác....................................................................................... 60
2. OP07............................................................................................ 61
Phần 2. Phần Cứng............................................. 62
Khối cảm biến và mạch gia công................................................. 63
Phần 3. Lưu đồ giải thuật và chương trình....... 67
1.Lưu đồ giải thuật........................................................................ 68
2.Chương trình điều khiển bằng ngôn ngữ Delphi.................... 71
Biểu đồ khảo sát hệ thống nhiệt...................................................... 99
Tài liệu tham khảo........................................................................... 102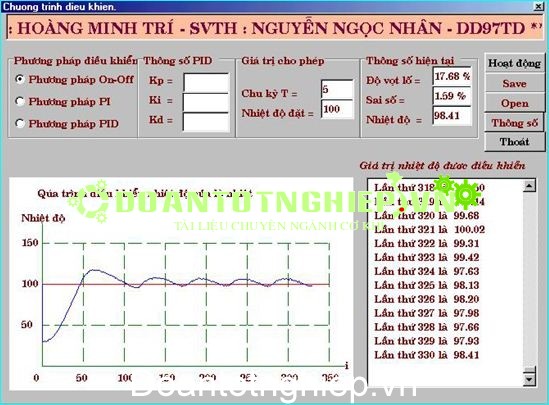
CÁC KHỐI CƠ BẢN TRONG HỆ THỐNG ĐIỀU KHIỂN NHIỆT ĐỘ
Như vậy mạch của chúng ta có những khối cơ bản như sau :
- Khối cảm biết và gia công : sử dụng cảm biến nhiệt độ là Thermocouple, lấy tín hiệu thông qua Op-Amp OP-07, đưa nhiệt độ cần xử lý về ngõ vào Analog của bộ biến đổi AD.
- Bộ biến đổi AD : đây là mạch lấy tín hiệu AD để xử lý thông qua Card AD PCL-818 của hãng Advantech. Thông qua đó, Card AD này sẽ đưa giá trị nhiệt độ và các thông số khác cho máy tính xử lý. Ngoài ra PCL-818 còn là Card DA với nhiệm vụ điều khiển mạch kích cho mạch nhiệt độ.
- Mạch công suất : mạch này sẽ bị tác động trực tiếp bới PCL-818, với nhiệm vụ kích ngắt lò trong quá trình điều khiển. Linh kiện sử dụng trong mạch này là Solid State Relay(SSR).
- Khối xử lý chính :có thể xem máy tính là khối xử lý chính. Với ngôn ngữ lập trình Delphi, máy tính sẽ điều khiển quá trình đóng, ngắt lò.
- Màn hình hiển thị : là màn hình giao diện của Delphi. Các giá trị, cũng nhu các thông số, những tác động kỹ thuật sẽ tác động trực tiếp trên màn hình này.
Các hãng kỹ thuật ngày nay đã tích hợp các thành phần trên thành sản phẩm chuyên dùng và bán trên thị trường. Có những chương trình giao diện ( như Visual Basic ) và có những nút điều khiển, thuận lợi cho người sử dụng. Có thể chọn khâu khuếch đại P, PI, PD hay PID của các hãng.
......................................
NHIỆT ĐỘ
CÁC LOẠI CẢM BIẾN NHIỆT ĐỘ THÔNG DỤNG
Nhiệt độ là thành phần chủ yếu trong hệ thống thu thập dữ liệu. Do vậy, nếu chọn lựa thiết bị đo lường nhiệt độ chính xác ta có thể tiệt kiệm chi phí năng lượng, tăng độ an toàn và giảm thời gian kiểm tra… thiết bị đo lường nhiệt độ thường dùng là cảm biến nhiệt độ. Cặp nhiệt điện, điện trở nhiệt, thermistors and infrared thermometers là những loại cảm biến nhiệt độ thông thường. Việc chọn lựa thiết bị để hoạt động chính xác tuỳ thuộc vào nhiệt độ tối đa, tối thiểu cần đo, độ chính xác và những điều kiện về môi trường. Trước hết, chúng ta tìm hiểu các khái niệm về nhiệt độ.
1. nhiệt độ và các thang đo nhiệt độ
Galileo được cho là người đầu tiên phát minh ra thiết bị đo nhiệt độ, vào khoảng năm 1592. Ông ta làm thí nghiệm như sau : trên một bồn hở chứa đầy cồn, ông cho treo một ống thủy tinh dài có cổ hẹp, đầu trên của nó có bầu hình cầu chứa đầy không khí. Khi gia tăng nhiệt, không khí trong bầu nở ra và sôi sùng sục trong cồn. Còn khi lạnh thì không khí co lại và cồn dâng lên trong lòng ống thủy tinh. Do đó, sự thay đổi của nhiệt trong bầu có thể biết được bằng cách quan sát vị trí của cồn trong lòng ống thủy tinh. Tuy nhiên, người ta chỉ biết sự thay đổi của nhiệt độ chứ không biết nó là bao nhiêu vì chưa có một tầm đo cho nhiệt độ.
Đầu những năm 1700, Gabriel Fahrenheit, nhà chế tạo thiết bị đo người Hà Lan, đã tạo ra một thiết bị đo chính xác và cho phép lặp lại nhiều lần. Đầu dưới của thiết bị được gán là 0 độ, đánh dấu vị trí nhiệt của nước đá trộn với muối (hay ammonium chloride) vì đây là nhiệt độ thấp nhất thời đó. Đầu trên của thiết bị được gán là 96 độ, đánh dấu nhiệt độ của máu người. Tại sao là 96 độ mà không phải là 100 độ?. Câu trả lời là bởi vì người ta chia tỷ lệ theo 12 phần như các tỷ lệ khác thời đó.
Khoảng năm 1742, Anders Celsius đề xuất ý kiến lấy điểm tan của nước đá gán 0 độ và điểm sôi của nước gán 100 độ, chia làm 100 phần.
Đầu những năm 1800, William Thomson (Lord Kelvin) phát triển một tầm đo phổ quát dựa trên hệ số giãn nở của khí lý tưởng. Kelvin thiết lập khái niệm về độ 0 tuyệt đối và tầm đo này được chọn là tiêu chuẩn cho đo nhiệt hiện đại.
Thang Kelvin : đơn vị là K. Trong thang Kelvin này, người ta gán cho nhiệt độ cho điểm cân bằng của ba trạng thái: nước – nước đá – hơi mp65t giá trị số bằng 273.15K
Từ thang nhiệt độ nhiệt động học tuyệt đối( Thang Kelvin), người ta đã xác định thang mới là thang Celsius và thang Fahrenheit( bằng cách dịch chuyển các giá trị nhiệt độ)
Thang Celsius : Trong thang đo này, đơn vị nhiệt độ là (°C ), một độ Celsius bằng một độ Kelvin. Quan hệ giữa nhiệt độ Celsius và nhiệt độ Kelvin được xác định bằng biểu thức :
T(°C) = T(°K) - 273,15
Thang Fahrenheit :
T(°C) =5/9 {T(°F) – 32}
T(°F) =9/5 T(°C) + 32
2. CÁc loại cảm biến hiện tại
Tùy theo lĩnh vực đo và điều kiện thực tế mà có thể chọn một trong bốn loại cảm biến : thermocouple, RTD, thermistor, và IC bán dẫn. Mỗi loại có ưu điểm và khuyết điểm riêng của nó.
2.1. Thermocouple
Ưu điểm
- Là thành phần tích cực, tự cung cấp công suất.
- Đơn giản.
- Rẻ tiền.
- Tầm thay đổi rộng.
- Tầm đo nhiệt rộng.
Khuyết điểm
- Phi tuyến.
- Điện áp cung cấp thấp.
- Đòi hỏi điện áp tham chiếu.
- Kém ổn định nhất.
- Kém nhạy nhất.
2.2. RTD (resistance temperature detector)
Ưu điểm
- Ổn định nhất.
- Chính xác nhất.
- Tuyến tính hơn thermocouple.
Khuyết điểm
- Mắc tiền.
- Cần phải cung cấp nguồn dòng.
- Lượng thay đổi DR nhỏ.
- Điện trở tuyệt đối thấp.
- Tự gia tăng nhiệt.
2.3. Thermistor
Ưu điểm
- Ngõ ra có giá trị lớn.
- Nhanh.
- Đo hai dây.
Khuyết điểm
- Phi tuyến.
- Giới hạn tầm đo nhiệt.
- Dễ vỡ.
- Cần phải cung cấp nguồn dòng.
- Tự gia tăng nhiệt.
2.4. IC cảm biến
Ưu điểm
- Tuyến tính nhất.
- Ngõ ra có giá trị cao nhất.
- Rẻ tiền.
Khuyết điểm
- Nhiệt độ đo dưới 200°C.
- Cần cung cấp nguồn cho cảm biến.
Trong nội dung của luận văn này, chúng ta sử dụng Thermocouple để đo nhiệt độ.
3. Thermocouple và hiệu ứng seebeck
3.1. Hiệu ứng Seebec Năm 1821, Thomas Seebeck đã khám phá ra rằng nếu nối hai dây kim loại khác nhau ở hai đầu và gia nhiệt một đầu nối thì sẽ có dòng điện chạy trong mạch đó.
Nếu mạch bị hở một đầu thì thì hiệu điện thế mạch hở (hiệu điện thế Seebeck) là một hàm của nhiệt độ mối nối và thành phần cấu thành nên hai kim loại. Khi nhiệt độ thay đổi một lượng nhỏ thì hiệu điện thế Seebeck cũng thay đổi tuyến tính theo :
DeAB = aDT với a là hệ số Seebeck
3.2 Quá trình dẫn điện trong Thermocouple
Cặp nhiệt điện là thiết bị chủ yếu để đo nhiệt độ. Nó dựa trên cơ sở kết quả tìm kiếm của Seebeck(1821), cho rằng một dòng điện nhỏ sẽ chạy trong mạch bao gồm hai dây dẩn khác nhau khi mối nối của chúng được giữ ở nhiệt độ khác nhau khi mối nối của chúng được giữ ở nhiệt độ khác nhau. Suất điện động Emf sinh ra trong điều kiện này được gọi là suất điện động Seebeck. Cặp nhiệt điện sinh ra trong mạch nhiệt điện này được gọi là Thermocouple.
....................................................................
Nếu hai đầu nối của volt kế không cùng nhiệt độ thì hai hiệu điện thế sinh ra không triệt tiêu lẫn nhau, và do đó xuất hiện sai lệch. Trong các phép đo lường cần chính xác, người ta gắn chúng trên một khối đẳng nhiệt. Khối này cách điện nhưng dẫn nhiệt rất tốt nên xem như J3 và J4 có cùng nhiệt độ (bằng bao nhiêu thì không quan trọng bởi vì hai hiệu điện thế sinh ra luôn đối nhau nên luôn triệt tiêu nhau không phụ thuộc giá trị của nhiệt độ).
3.4 Bù nhiệt của môi trường
Như trên đã phân tích, khi dùng thermocouple thì giá trị hiệu điện thế thu được bị ảnh hưởng bởi hai loại nhiệt độ : nhiệt độ cần đo và nhiệt độ tham chiếu. Cách gán 0°C cho nhiệt độ tham chiếu thường chỉ làm trong thí nghiệm để rút ra các giá trị của thermocouple và đưa vào bảng tra. Thực tế sử dụng thì nhiệt độ tham chiếu thường là nhiệt độ của môi trường tại nơi mạch hoạt động nên không thể biết nhiệt độ này là bao nhiêu và do đó vấn đề bù trừ nhiệt độ được đặt ra để sao cho ta thu được hiệu điện thế chỉ phụ thuộc vào nhiệt độ cần đo mà thôi.
Bù trừ nhiệt độ không có nghĩa là ta ước lượng trước nhiệt độ môi trường rồi khi đọc giá trị hiệu điện thế thì trừ đi giá trị mà ta đã ước lượng. Cách làm này hoàn toàn không thu được kết quả gì bởi hai lý do :
- Nhiệt độ môi trường không phải là đại lượng cố định mà thay đổi theo thời gian theo một qui luật không biết trước.
- Nhiệt độ môi trường tại những nơi khác nhau có giá trị khác nhau.
Bù nhiệt môi trường là một vấn đề thực tế và phải xét đến một cách nghiêm túc. Có nhiều cách khác nhau, về phần cứng lẫn phần mềm, nhưng nhìn chung đều phải có một thành phần cho phép xác định nhiệt độ môi trường rồi từ đó tạo ra một giá trị để bù lại giá trị tạo ra bởi thermocouple.
3.5 Các loại thermocouple
Về nguyên tắc thì người ta hoàn toàn có thể tạo ra một thermocouple cho giá trị ra bất kỳ bởi vì có rất nhiều tổ hợp của hai trong số các kim loại và hợp kim hiện có.
Tuy nhiên để có một thermocouple dùng được cho đo lường thì người ta phải xét đến các vấn đề như : độ tuyến tính, tầm đo, độ nhạy, … và do đó chỉ có một số loại dùng trong thực tế như sau :
Loại J : kết hợp giữa sắt với constantan, trong đó sắt là cực dương và constantan là cực âm. Hệ số Seebeck là 51mV/°C ở 20°C.
Loại T : kết hợp giữa đồng với constantan, trong đó đồng là cực dương và constantan là cực âm. Hệ số Seebeck là 40mV/°C ở 20°C.
Loại K : kết hợp giữa chromel với alumel, trong đó chromel là cực dương và alumel là cực âm. Hệ số Seebeck là 40mV/°C ở 20°C.
Loại E : kết hợp giữa chromel với constantan, trong đó chromel là cực dương và constantan là cực âm. Hệ số Seebeck là 62mV/°C ở 20°C.
Loại S, R, B : dùng hợp kim giữa platinum và rhodium, có 3 loại : S) cực dương dùng dây 90% platinum và 10% rhodium, cực âm là dây thuần platinum. R) cực dương dùng dây 87% platinum và 13% rhodium, cực âm dùng dây thuần platinum. B) cực dương dùng dây 70% platinum và 30% rhodium, cực âm dùng dây 94% platinum và 6% rhodium. Hệ số Seebeck là 7mV/°C ở 20°C.
3.6 Một số nhiệt độ chuẩn
Sau khi đã thiết kế mạch xong thì người ta cần một số nhiệt độ chuẩn dùng cho cân chỉnh. Bảng sau đây đưa ra một số loại nhiệt độ chuẩn :
|
Loại |
Nhiệt độ |
|
|
Điểm sôi của oxygen |
-183,0 °C |
-297,3°F |
|
Điểm thăng hoa của CO2 |
- 78,5 °C |
-109,2°F |
|
Điểm đông đá |
0 °C |
32 °F |
|
Điểm tan của nước |
0,01°C |
32 °F |
|
Điểm sôi của nước |
100,0 °C |
212 °F |
|
Điểm tan của axit benzoic |
122,4 °C |
252,3°F |
|
Điểm sôi của naphthalene |
218 °C |
424,4°F |
|
Điểm đông đặc của thiếc |
231,9 °C |
449,4°F |
|
Điểm sôi của benzophenone |
305,9 °C |
582,6°F |
|
Điểm đông đặc của cadmium |
321,1 °C |
610 °F |
|
Điểm đông đặc của chì |
327,5 °C |
621,5°F |
|
Điểm đông đặc của kẽm |
419,6 °C |
787,2°F |
|
Điểm sôi của sulfur |
444,7 °C |
832,4°F |
|
Điểm đông đặc của antimony |
630,7 °C |
1167,3°F |
|
Điểm đông đặc của nhôm |
660,4 °C |
1220,7°F |
|
Điểm đông đặc của bạc |
961,9 °C |
1763,5°F |
|
Điểm đông đặc của vàng |
1064,4 °C |
1948 °F |
|
Điểm đông đặc của đồng |
1084,5 °C |
1984,1°F |
|
Điểm đông đặc của palladium |
1554 °C |
2829 °F |
|
Điểm đông đặc của platinum |
1772 °C |
3222 °F |
.....................................................
CÁC PHƯƠNG PHÁP BIẾN ĐỔI AD CARD AD PCL-818 CỦA ADVANTECH
1. SƠ LƯỢC VỀ CÁC PHƯƠNG PHÁP BIẾN ĐỔI AD
Tín hiệu trong thế giới thực thường ở dạng tương tự (analog), nên mạch điều khiển thu thập dữ liệu từ đối tượng điều khiển về (thông qua các cảm biến) cũng ở dạng tương tự. Trong khi đó, bộ điều khiển ngày nay thường là các mP, mC xử lý dữ liệu ở dạng số (digital). Vì vậy, cần phải chuyển đổi tín hiệu ở dạng tương tự thành tín hiệu ở dạng số thông qua bộ biến đổi AD.
Có nhiều phương pháp biến đổi AD khác nhau, ở đây chỉ giới thiệu một số phương pháp điển hình.
1.1. Biến đổi AD dùng bộ biến đổi DA
Trong phương pháp này, bộ biến đổi DA được dùng như một thành phần trong mạch.
Khoảng thời gian biến đổi được chia bởi nguồn xung clock bên ngoài. Đơn vị điều khiển là một mạch logic cho phép đáp ứng với tín hiệu Start để bắt đầu biến đổi. Khi đó, OPAMP so sánh hai tín hiệu vào angalog để tạo ra tín hiệu digital biến đổi trạng thái của đơn vị điều khiển phụ thuộc vào tín hiệu analog nào có giá trị lớn hơn. Bộ biến đổi hoạt động theo các bước :
- Tín hiệu Start để bắt đầu biến đổi.
- Cứ mỗi xung clock, đơn vị điều khiển sửa đổi số nhị phân đầu ra và đưa vào lưu trữ trong thanh ghi.
- Số nhị phân trong thanh ghi được chuyển đổi thành áp analog vAX qua bộ biến đổi DA.
- OPAMP so sánh vAX với áp đầu vào vA. Nếu vAX < vA thì đầu ra ở mức cao, còn ngược lại, nếu vAX vượt qua vA một lượng vT (áp ngưỡng) thì đầu ra ở mức thấp và kết thúc quá trình biến đổi. Ơ thời điểm này, vAX đã xấp xỉ bằng vA và số nhị phân chứa trong thanh ghi chính là giá trị digital xấp xỉ của vA (theo một độ phân giải và chính xác nhất định của từng hệ thống).
- Đơn vị điều khiển kích hoạt tín hiệu EOC, báo rằng đã kết thúc quá trình biến đổi.
Dựa theo phương pháp này, có nhiều bộ biến đổi như sau :
1.1.1. Bộ biến đổi AD theo hàm dốc
Đây là bộ biến đổi đơn giản nhất theo mô hình bộ biến đổi tổng quát trên. Nó dùng một counter làm thanh ghi và cứ mỗi xung clock thì gia tăng giá trị nhị phân cho đến khi vAX ³ vA. Bộ biến đổi này được gọi là biến đổi theo hàm dốc vì dạng sóng vAX có dạng của hàm dốc, hay nối đúng hơn là dạng bậc thang. Đôi khi nó còn được gọi là bộ biến đổi AD loại counter.
Hình trên cho thấy sơ đồ mạch của bộ biến đổi AD theo hàm dốc, bao gồm một counter, một bộ biến đổi DA, một OPAMP so sánh, và một cổng AND cho điều khiển . Đầu ra của OPAMP được dùng như tín hiệu tích cực mức thấp của tín hiệu EOC. Giả sử vA dương, quá trình biến đổi xảy ra theo các bước :
- Xung Start được đưa vào để reset counter về 0. Mức cao của xung Start cũng ngăn không cho xung clock đến counter.
- Đầu vào của bộ biến đổi DA đều là các bit 0 nên áp ra vAX = 0v.
- Khi vA > vAX thì đầu ra của OPAMP (EOC) ở mức cao.
- Khi Start xuống mức thấp, cổng AND được kích hoạt và xung clock được đưa vào counter.
- Counter đếm theo xung clock và vì vậy đầu ra của bộ biến đổi DA, vAX, gia tăng một nấc trong một xung clock
- Quá trình đếm của counter cứ tiếp tục cho đến khi vAX bằng hoặc vượt qua vA một lượng vT (khoảng từ 10 đến 100mv). Khi đó, EOC xuống thấp và ngăn không cho xung clock đến counter. Từ đó kết thúc quá trình biến đổi.
- Counter vẫn giữ giá trị vừa biến đổi xong cho đến khi có một xung Start cho quá trình biến đổi mới.
Từ đó ta thấy rằng bộ biến đổi loại này có tốc độ rất chậm (độ phân giải càng cao thì càng chậm) và có thời gian biến đổi phụ thuộc vào độ lớn của điện áp cần biến đổi.
1.1.2. Bộ biến đổi AD xấp xỉ liên tiếp
Đây là bộ biến được dùng rộng rãi nhất trong các bộ biến đổi AD. Nó có cấu tạo phức tạp hơn bộ biến đổi AD theo hàm dốc nhưng tốc độ biến đổi nhanh hơn rất nhiều. Hơn nữa, thời gian biến đổi là một số cố định không phụ thuộc giá trị điện áp đầu vào.
Sơ đồ mạch và giải thuật như sau :
........................................................................
Mạch trên có độ phân giải là 1V, cầu chia điện áp thiết lập nên các điện áp so sánh (7 mức tương ứng 1V, 2V, …) với điện áp cần biến đổi. Đầu ra của các OPAMP được nối đến một priority encoder và đầu ra của nó chính là giá trị digital xấp xỉ của điện áp đầu vào.
Các bộ biến đổi có nhiều bit hơn dễ dàng suy ra theo mạch trên.
1.3. Bộ biến đổi AD theo hàm dốc dạng lên xuống (tracking ADC)
Bộ biến đổi loại này được cải tiến từ bộ biến đổi AD theo hàm dốc. Ta thấy rằng tốc độ của bộ biến đổi AD theo hàm dốc khá chậm bởi vì counter được reset về 0 mỗi khi bắt đầu quá trình biến đổi. Giá trị VAX là 0 lúc bắt đầu và tăng dần cho đến khi vượt qua VA. Rõ ràng là thời gian này là hoàn toàn lãng phí bởi vì điện áp analog thay đổi một cách liên tục, giá trị sau nằm trong lân cận giá trị trước.
Bộ biến đổi AD theo hàm dốc dạng lên xuống dùng một counter đếm lên/xuống thay cho counter chỉ đếm lên ở bộ biến đổi AD theo hàm dốc và không reset về 0 khi bắt đầu. Thay vì vậy, nó giữ nguyên giá trị của lần biến đổi trước và tăng giảm tùy thuộc vào giá trị điện áp mới so với giá trị điện áp cũ.
1.4. Bộ biến đổi AD dùng chuyển đổi áp sang tần số
Bộ biến đổi loại này đơn giản hơn bộ biến đổi AD dùng biến đổi DA. Thay vì vậy nó dùng một bộ dao động tuyến tính được điều khiển bởi điện áp để tạo ra tần số tương ứng với áp vào. Tần số này được dẫn đến một counter đếm trong một thời khoảng cố định và khi kết thúc khoảng thời gian cố định này, giá trị đếm tỷ lệ với điện áp vào.
Phương pháp này đơn giản nhưng khó đạt được độ chính xác cao bởi vì khó có thể thiết kế bộ biến đổi áp sang tần số có độ chính xác hơn 0,1%.
Một trong những ứng dụng chính của loại này là dùng trong môi trường công nghiệp có nhiễu cao. Điện áp được chuyển từ transducer về máy tính điều khiển thường rất nhỏ, nếu truyền trực tiếp về thì sẽ bị nhiễu tác động đáng kể và giá trị thu được hầu như không còn đúng nữa. Do đó, người ta dùng bộ biến đổi áp sang tần số ngay tại transducer và truyền các xung về cho máy tính điều khiển đếm nên ít bị ảnh hưởng bởi nhiễu.
1.5. Bộ biến đổi AD theo tích phân hai độ dốc
Bộ biến đổi loại này là một trong những bộ có thời gian biến đổi chậm nhất (thường là từ 10 đến 100ms) nhưng có lợi điểm là giá cả tương đối rẻ không dùng các thành phần chính xác như bộ biến đổi AD hoặc bộ biến đổi áp sang tần số.
Nguyên tắc chính là dựa vào quá trình nạp và xả tuyến tính của tụ với dòng hằng. Đầu tiên, tụ được nạp trong một khoảng thời gian xác định từ dòng hằng rút ra từ điện áp vào vA. Vì vậy, ở cuối thời điểm nạp, tụ sẽ có một điện áp tỷ lệ với điện áp vào. Cũng vào lúc này, tụ được xả tuyến tính với một dòng hằng rút ra từ điện áp tham chiếu chính xác vref. Khi điện áp trên tụ giảm về 0 thì quá trình xả kết thúc. Trong suốt khoảng thời gian xả này, một tần số tham chiếu được dẫn đến một counter và bắt đầu đếm. Do khoảng thời gian xả tỷ lệ với điện áp trên tụ lúc trước khi xả nên ở cuối thời điểm xả, counter sẽ chứa một giá trị tỷ lệ với điện áp trên tụ trước khi xả, tức là tỷ lệ với điện áp vào vA.
Ngoài giá thành rẻ thì bộ biến đổi loại này còn có ưu điểm chống nhiễu và sự trôi nhiệt. Tuy nhiên thời gian biến đổi chậm nên ít dùng trong các ứng dụng thu thập dữ liệu đòi hỏi thời gian đáp ứng nhanh. Nhưng đối với các quá trình biến đổi chậm (có quán tính lớn) như lò nhiệt thì rất đáng để xem xét đến.
2. CARD AD – PCL 818 CỦA HÃNG ADVANTECH:









