ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ Thiết kế bộ lọc thông số cao có tần số cắt 1600kHz
NỘI DUNG ĐỒ ÁN
MỤC LỤC Thiết kế bộ lọc thông số cao có tần số cắt 1600kHz
TỪ VIẾT TẮT.. 1
MỞ ĐẦU.. 2
CHƯƠNG 1: TỔNG QUAN VỀ BỘ LỌC SỐ.. 4
1.1 Giới thiệu chương. 4
1.2 Khái niệm.. 4
1.2.1 Khái niệm bộ lọc. 4
1.2.2 Khái niệm bộ lọc số. 4
1.3 Các bộ lọc lý tưởng. 6
1.4 Các chỉ tiêu của bộ lọc. 6
1.5 Ưu điểm của bộ lọc số. 9
1.6 Phân loại bộ lọc số. 10
1.7 Các thành phần cơ bản của bộ lọc số. 10
1.8 Kết luận chương. 11
CHƯƠNG 2: CÁC PHƯƠNG PHÁP THIẾT KẾ BỘ LỌC FIR.. 13
2.1 Giới thiệu chương. 13
2.2 Cấu trúc bộ lọc FIR.. 13
2.2.1 Cấu trúc dạng trực tiếp. 14
2.2.2 Cấu trúc dạng ghép tầng. 14
2.2.3 Cấu trúc dạng pha tuyến tính. 15
2.3 Thiết kế bộ lọc FIR bằng phương pháp cửa sổ. 16
2.3.1 Phương pháp thiết kế. 16
2.3.2 Nguyên tắc:17
2.3.3 Hàm truyền của các loại cửa sổ. 17
2.4 Thiết kế bộ lọc FIR bằng phương pháp lấy mẫu tần số. 19
2.4.1 Các đặc tính của bộ lọc FIR pha tuyến tính. 19
2.4.1.1 Đáp ứng xung h(n). 20
2.4.1.2 Đáp ứng tần số H(). 22
2.4.2 Phương pháp thiết kế. 28
2.5 Thiết kế bộ lọc FIR pha tuyến tính bằng phương pháp tối ưu. 30
2.5.1 Hàm sai số có trọng số . 31
2.4.2 Các bước thực hiện. 33
2.6 Kết luận chương. 35
CHƯƠNG 3: CÁC PHƯƠNG PHÁP THIẾT KẾ BỘ LỌC IIR.. 37
3.1 Giới thiệu chương. 37
3.2 Cấu trúc bộ lọc IIR.. 37
3.2.1 Cấu trúc dạng trực tiếp. 38
3.2.2 Cấu trúc dạng ghép tầng. 39
3.2.3 Cấu trúc dạng song song. 40
3.3 Thiết kế bộ lọc số IIR.. 41
3.4 Thiết kế bộ lọc IIR từ bộ lọc tương tự. 41
3.4.1 Nguyên tắc chung. 41
3.4.2 Phương pháp tương đương vi phân. 42
3.4.3 Phương pháp bất biến xung. 44
3.4.4 Phương pháp biến đổi song tuyến. 47
3.5 Các bộ lọc tương tự thông dụng. 49
3.5.1 Bộ lọc Butterworth. 49
3.5.2 Bộ lọc Chebyshev. 51
3.5.2.1 Bộ lọc Chebyshev loại 1. 51
3.5.2.2 Bộ lọc Chebyshev loại 2. 53
3.5.3 Bộ lọc Elliptic. 54
3.6 Kết luận chương. 55
CHƯƠNG 4: TÍNH TOÁN VÀ MÔ PHỎNG.. 57
4.1 Giới thiệu chương. 57
4.2 Tính toán thiết kế:57
4.2.1 Tính toán thiết kế bộ lọc FIR.. 58
4.2.1.1 Tính toán thiết kế bộ lọc FIR bằng phương pháp cửa sổ. 58
4.2.1.1 Tính toán thiết kế bộ lọc FIR bằng phương pháp lấy mẫu tần số. 60
4.2.2 Tính toán thiết kế bộ lọc IIR.. 61
4.3 Kết quả mô phỏng. 63
4.3.1 Bộ lọc FIR.. 63
4.3.1.1 Phương pháp cửa sổ. 63
4.3.1.2 Phương pháp lấy mẫu tần số. 66
4.3.2 Bộ lọc IIR.. 69
4.4 Kết luận chương. 70
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ĐỀ TÀI72
TÀI LIỆU THAM KHẢO.. 73
PHỤ LỤC.. 74
TỪ VIẾT TẮT
|
BPF BSF DF DFT DSP FIR FPGA
HPF IDFT IIR LPF LTI RF
|
Band Pass Filter Band Stop Filter Digital Filter Discrete Fourier Transform Digital Signal Processing Finite Impulse Response Field Programmable Gate Array
High Pass Filter Inverse Discrete Fourier Transform Infinite Impulse Response Low Pass Filter Linear Time Invariant Radio Frequency |
Bộ lọc thông dải Bộ lọc chắn dải Bộ lọc số Biến đổi Fourier rời rạc Xử lý tín hiệu số Đáp ứng xung hữu hạn Mảng cổng lập trình được dạng trường Bộ lọc thông cao Biến đổi Fourier rời rạc ngược Đáp ứng xung vô hạn Bộ lọc thông thấp Tuyến tính bất biến theo thời gian Sóng vô tuyến |
MỞ ĐẦU
Tín hiệu xuất hiện hầu như ở tất cả các ngành khoa học kỹ thuật như: thông tin liên lạc, rada, vật lý, sinh học… Có hai dạng tín hiệu: một là tín hiệu tương tự (liên tục theo thời gian), hai là tín hiệu số (tín hiệu rời rạc). Ngày nay, với sự phát triển của công nghệ, máy tính và xu hướng số hóa thì hầu hết các tín hiệu tương tự đều được chuyển đổi thành tín hiệu số để truyền tải, lưu trữ và xử lý. Do đó, xử lý tín hiệu số (DSP) càng ngày càng trở nên quan trọng, phổ biến và được ứng dụng rộng rãi trong nhiều lĩnh vực và thiết bị. Để có thể tiếp cận lĩnh vực này, chúng ta cần có những kiến thức cơ bản về tín hiệu số và các phương pháp xử lý.
Một trong những phép xử lý cơ bản nhất của DSP là lọc, và các hệ thống được đề cập đến nhiều nhất trong xử lý tín hiệu số là các bộ lọc số (DF). Nếu xét đáp ứng xung có thể chia các bộ lọc số thành hai loại chính là bộ lọc có đáp ứng xung hữu hạn FIR và bộ lọc có đáp ứng xung vô hạn IIR. Còn nếu xét về đáp ứng tần số biên độ có thể chia các bộ lọc FIR hay IIR thành bốn loại cơ bản: bộ lọc thông thấp (LPF), bộ lọc thông cao (HPF), bộ lọc thông dải (BPF) và bộ lọc chắn dải (BSF). Việc thiết kế bộ lọc FIR hay IIR đều có nhiều phương pháp khác nhau, mỗi phương pháp có những ưu và khuyết điểm riêng.
Trong đồ án này sẽ tìm hiểu các phương pháp thiết kế bộ lọc FIR và IIR, đồng thời thiết kế và mô phỏng hai loại bộ lọc này. Nội dung của đồ án được chia thành bốn chương nhỏ như sau:
vCHƯƠNG 1: TỔNG QUAN VỀ BỘ LỌC SỐ
Trình bày tổng quan về bộ lọc số, những ưu điểm nổi bật của bộ lọc số, phân loại. Tìm hiểu về các dạng cấu trúc của hai loại bộ lọc FIR và IIR.
vCHƯƠNG 2: PHƯƠNG PHÁP THIẾT KẾ BỘ LỌC FIR
Tìm hiểu về các phương pháp thiết kế thông dụng nhất của bộ lọc FIR.
vCHƯƠNG 3: PHƯƠNG PHÁP THIẾT KẾ BỘ LỌC IIR
Tìm hiểu về các phương pháp thiết kế bộ lọc IIR và các loại bộ lọc tương tự thông dụng dùng để chuyển đổi thành bộ lọc số IIR.
vCHƯƠNG 4: TÍNH TOÁN VÀ MÔ PHỎNG
Tiến hành tính toán, thiết kế bộ lọc FIR cũng như IIR và mô phỏng các bộ lọc này.
Phương pháp nghiên cứu xuyên suốt đồ án là tính toán, thiết kế và mô phỏng các bộ lọc số theo những phương pháp khác nhau để thấy rõ hơn những ưu và khuyết điểm của các phương pháp này. Đồng thời nắm rõ hơn về bộ lọc số để có thể ứng dụng chúng vào thực tiễn một cách hiệu quả nhất.
Đồ án đã tiến hành tính toán, thiết kế và mô phỏng các bộ lọc FIR và IIR theo các phương pháp khác nhau.
CHƯƠNG 1: TỔNG QUAN VỀ BỘ LỌC SỐ
1.1 Giới thiệu chương
Lọc là một quá trình rất quan trọng trong xử lý tín hiệu. Ngày nay, hầu hết tín hiệu được chuyển thành tín hiệu số để truyền tải hoặc lưu trữ nên bộ lọc số được sử dụng rất phổ biến trong xử lý tín hiệu. Để xử lý tín hiệu, chúng ta phải thiết kế và thực hiện hệ thống (bộ lọc). Vấn đề thiết kế bộ lọc bị ảnh hưởng bởi các yếu tố như loại bộ lọc hoặc cấu trúc của nó. Do đó, trước khi đi vào việc thiết kế, chúng ta cần tìm hiểu về bộ lọc bởi vì cấu trúc bộ lọc khác nhau thì sẽ cần có chiến lược thiết kế khác nhau. Trong chương này sẽ tìm hiểu một số lý thuyết cơ bản về bộ lọc số, các thành phần cơ bản cấu thành bộ lọc số để tạo tiền đề cho việc tìm hiểu các cấu trúc bộ lọc số cũng như các phương pháp thiết kế và thiết kế một bộ lọc số trong các chương sau. Nội dung cơ bản của chương này như sau:
- Khái niệm bộ lọc.
- Các chỉ tiêu của bộ lọc.
- Các ưu điểm của bộ lọc số.
- Phân loại và đặc điểm của từng loại.
- Các thành phần cơ bản của bộ lọc.
1.2 Khái niệm
1.2.1 Khái niệm bộ lọc
- Bộ lọc là một tập hợp các linh kiện thiết bị có thể xử lý nhằm loại bỏ những tín hiệu không mong muốn và giữ lại những tín hiệu mà ta quan tâm đến.
1.2.2 Khái niệm bộ lọc số
Trước tiên ta xét hệ thống tuyến tính bất biến trong miền biến số n:
Hình 1.1 Hệ thống tuyến tính bất biến trong miền biến số n.
Trong đó:
h(n): là đáp ứng xung của hệ thống, là đặc trưng hoàn toàn cho hệ thống trong miền biến số n. Mặt khác, một hệ thống tuyến tính bất biến cũng được biểu diễn bởi phương trình sai phân sau:
Tổng hợp tất cả các hệ số ak và br sẽ biểu diễn một hệ thống tuyến tính bất biến. Tức là các hệ số ak và br đặc trưng hoàn toàn cho hệ thống.
Trong miền z, hệ thống được đặc trưng bởi hàm truyền đạt H(z):
Khi đó, trong miền tần số:
Nếu hàm truyền đạt H(z) được đánh giá trên vòng tròn đơn vị |z|=1 thì chúng ta có đặc tính tần số :
Quan hệ trên cho thấy rằng việc phân bố tần số và pha của tín hiệu vào x(n) được tác động bởi hệ thống tùy thuộc vào dạng của . Chính dạng của đã xác định việc suy giảm hay khuếch đại các thành phần tần số khác nhau. Các hệ thống tương ứng với này có đặc tính tần số mong muốn và có thể thực thi được về mặt vật lý được gọi là bộ lọc số.
1.3 Các bộ lọc lý tưởng
Có bốn bộ lọc số lý tưởng là:
- Bộ lọc số thông thấp.
- Bộ lọc số thông cao.
- Bộ lọc số thông dải.
- Bộ lọc số chắn dải.
Trong thực tế, các bộ lọc số lý tưởng đều không thể thực hiện được về mặt vật lý mặc dù xét trường hợp đáp ứng xung h(n) thực bởi vì chiều dài của h(n) là vô cùng. Vì vậy, trong thực tế ta chỉ có thể thiết kế bộ lọc số gần lý tưởng, tức là thỏa mãn một số chỉ tiêu nào đó tùy theo mục đích sử dụng của bộ lọc.
1.4 Các chỉ tiêu của bộ lọc
Có 2 nhóm chỉ tiêu:
+ Các chỉ tiêu tuyệt đối.
+ Các chỉ tiêu tương đối.
Để thấy một cách trực quan ta lấy bộ lọc thông thấp làm ví dụ:
Hình 1.2 Các chỉ tiêu của bộ lọc: chỉ tiêu tuyệt đối và chỉ tiêu tương đối. [6]
Trong đó:
+ được gọi là dải thông.
+ được gọi là dải chắn.
+ được gọi là dải chuyển tiếp và không có ràng buộc nào về đáp ứng biên độ trong dải này.
- Các chỉ tiêu tương đối gồm có:
+ : độ gợn trong dải thông tính theo dB.
+ : độ gợn trong dải chắn tính theo dB.
- Các chỉ tiêu tuyệt đối:
|
1 |
|
Dải chắn |
|
Dải chuyển tiếp |
|
Dải thông |
Hình 1.3 Đặc tuyến của bộ lọc thông thấp trong thực tế. [6]
Trong đó:
+ : độ gợn trong dải thông.
+ : độ gợn trong dải chắn.
+ : tần số giới hạn dải chắn.
+ : tần số giới hạn dải thông.
+ : bề rộng dải chuyển tiếp.
Quan hệ giữa các chỉ tiêu:
Từ đây ta có thể suy ra:
Đối với các loại bộ lọc khác thì các chỉ tiêu cũng tương tự như bộ lọc thông thấp.
1.5 Ưu điểm của bộ lọc số
Việc bộ lọc số được sử dụng nhiều không chỉ vì càng ngày tín hiếu số càng được sử dụng nhiều mà còn vì những ưu điểm rất nổi bật của nó so với bộ lọc tương tự. Cụ thể như sau:
- Bộ lọc số thì có khả năng lập trình được, còn bộ lọc tương tự muốn thay đổi cấu trúc thì phải thiết kế và thi công lại bộ lọc.
- Các bộ lọc số thiết kế dễ dàng, dễ kiểm tra.
- Đặc điểm các mạch lọc tương tự là bị ảnh hưởng bởi sự trôi và phụ thuộc và nhiệt độ. Các bộ lọc số thì không có các vấn đề này và rất ổn định với cả thời gian lẫn nhiệt độ.
- Các bộ lọc số có thể xử lý các tín hiệu tần số thấp rất chính xác. Tốc độ xử lý của công nghệ DSP ngày càng tăng lên, làm cho các bộ lọc số có khả năng xử lý các tín hiệu tần số cao trong miền RF. (Thời gian trước thì đây là lĩnh vực “độc quyền” của công nghệ tương tự.
- Các bộ lọc số linh hoạt trong xử lý tín hiệu, có thể thích nghi với tín hiệu nhiễu.
- Các bộ xử lý DSP nhanh có thể xử lý các tổ hợp phức tạp, phần cứng tương đối đơn giản và mật độ tích hợp cao.
Ngoài ra, để nâng cao chất lượng của các bộ lọc tương tự thì ta chú trọng khắc phục hạn chế linh kiện như: độ chính xác, độ ổn định, sự phụ thuộc vào nhiệt độ… Còn đối với bộ lọc số, ta chú trọng đến các phương pháp thiết kế và thuật toán xử lý tín hiệu.
1.6 Phân loại bộ lọc số
- FIR: Hệ thống được đặc trưng bởi đáp ứng xung có chiều dài hữu hạn. Nó được gọi là hệ thống có đáp ứng xung có chiều dài hữu hạn, tức là h(n) chỉ khác không trong một khoảng có chiều dài hữu hạn M (từ 0 đến M-1). Bộ lọc FIR có các đặc điểm nổi bật như sau:
- Đáp ứng xung hữu hạn.
- Đáp ứng pha tuyến tính.
- Luôn ổn định.
- Thiết kế đơn giản.
Đáp ứng pha tuyến tính mang lại những thuận lợi sau:
+ Bài toán thiết kế chỉ gồm các phép tính số học thực chứ không cần phép tính số học phức.
+ Bộ lọc pha tuyến tính không có méo trễ nhóm và chỉ bị trễ một khoảng không đổi.
- IIR: Hệ thống được đặc trưng bởi đáp ứng xung có chiều dài vô hạn. Hệ thống được gọi là hệ thống có đáp ứng xung có chiều dài vô hạn, tức là h(n) khác không trong một khoảng vô hạn. Bộ lọc IIR có các đặc điểm nổi bật như sau:
- Đáp ứng xung vô hạn.
- Có thể không ổn định.
- Đáp ứng pha phi tuyến tính.
- Thiết kế phức tạp.
1.7 Các thành phần cơ bản của bộ lọc số
Các bộ lọc số là hệ thống LTI, chúng ta cần ba thành phần sau để mô tả cấu trúc của bộ lọc số. Những thành phần này được thể hiện trong hình 1.4:
|
x1(n) |
Hình 1.4 Các thành phần cơ bản của bộ lọc số. [6]
Trong đó:
Bộ cộng: Thành phần này có hai đầu vào và một đầu ra (thể hiện trong hình 1.4a). Nếu có thêm tín hiệu vào thứ ba thì phải ghép thêm một bộ cộng nữa mới thực hiện được. Tín hiệu đầu ra bằng tổng hai tín hiệu đầu vào.
Bộ khuếch đại: Thành phần này chỉ có một đầu vào và một đầu ra (hình 1.4b). Nếu hệ số khuếch đại là a thì tín hiệu vào sẽ được khuếch đại lên a lần ở đầu ra của nó.
Bộ trễ: Cũng như bộ khuếch đại, bộ trễ chỉ có một đầu vào và một đầu ra (hình 1.4c). Nó làm cho tín hiệu đi qua bị trễ một mẫu và thực hiện bằng cách sử dụng một thanh ghi dịch.
Sử dụng các thành phần cơ bản này, chúng ta có thể mô tả các cấu trúc khác nhau của cả hai loại bộ lọc FIR và IIR.
1.8 Kết luận chương
Chương này nêu tổng quan về bộ lọc số, định nghĩa bộ lọc số, các bộ lọc lý tưởng và phân loại. Trình bày các ưu điểm của bộ lọc số cũng như các thông số, chỉ tiêu của bộ lọc ở miền thời gian, miền tần số cần quan tâm khi thiết kế một bộ lọc số. Ngoài ra còn nêu khái quát các đặc điểm nổi bật của hai loại bộ lọc FIR và IIR, từ đây ta có thể nhận thấy sự khác biệt cơ bản của hai bộ lọc này:
Bảng 1.1 So sánh đặc điểm cơ bản của bộ lọc FIR và IIR
|
FIR |
IIR |
|
|
Và quan trọng hơn hết là đã trình bày các thành phần cấu trúc của bộ lọc, trên cơ sở đó tạo điều kiện thuận lợi hơn cho việc tìm hiểu các dạng cấu trúc cơ bản của bộ lọc FIR và IIR trong các chương tiếp theo.
CHƯƠNG 2: CÁC PHƯƠNG PHÁP THIẾT KẾ BỘ LỌC FIR
2.1 Giới thiệu chương
Chương này sẽ giới thiệu các dạng cấu trúc của bộ lọc FIR từ đó tạo điều kiện để tìm hiểu các phương pháp thiết kế bộ lọc này. Để thiết kế bộ lọc FIR có thể dùng nhiều phương pháp khác nhau. Mỗi phương pháp đều bắt nguồn từ các bộ lọc lý tưởng, tuy nhiên lại đi từ các cơ sở khác nhau. Các phương pháp này đều có ưu khuyết điểm riêng của nó. Vì vậy việc lựa chọn phương pháp thiết kế bộ lọc FIR sẽ phụ thuộc vào các yêu cầu mà bộ lọc cần đáp ứng. Để làm rõ cho vấn đề trên thì nội dung chương này sẽ đi vào tìm hiểu các phương pháp thiết kế bộ lọc FIR phổ biến nhất, bao gồm các bước cơ bản của phương pháp, thuật toán sử dụng (nếu có) và cách tính toán thông số của bộ lọc cũng như lý thuyết liên quan đến phương pháp đó. Nội dung chương này sẽ trình bày các phương pháp sau:
- Phương pháp cửa sổ.
- Phương pháp lấy mẫu tần số.
- Phương pháp tối ưu.
2.2 Cấu trúc bộ lọc FIR
Một bộ lọc đáp ứng xung hữu hạn với hàm hệ thống có dạng:
Như vậy, đáp ứng xung h(n) là:
Và phương trình sai phân là:
Bậc của bộ lọc là M (bằng với số lượng các hệ số). Nhờ đặc điểm có đáp ứng pha tuyến tính mà bộ lọc FIR rất cần thiết trong một số ứng dụng.
2.2.1 Cấu trúc dạng trực tiếp
Phương trình sai phân được thực hiện bởi một dãy các bộ trễ do không có đường phản hồi (2.3):
Cấu trúc dạng trực tiếp được cho trong hình với M = 5:
Hình 2.1 Cấu trúc bộ lọc FIR dạng trực tiếp. [6]
2.2.2 Cấu trúc dạng ghép tầng
Hàm hệ thống H(z) được biến đổi thành các tích của các khâu bậc 2 với các hệ số thực. Các khâu này được thực hiện ở dạng trực tiếp và bộ lọc tổng thể có dạng ghép tầng của các cấu trúc bậc 2.
Phương trình (2.1) có thể viết lại:
trong đó , Bk,1 và Bk,2 là các số thực đại diện cho các hệ số của các cấu trúc bậc 2. Cấu trúc dạng ghép tầng được cho trong hình với M = 7:
Hình 2.2 Cấu trúc bộ lọc FIR dạng ghép tầng. [6]
2.2.3 Cấu trúc dạng pha tuyến tính
Đối với các bộ lọc chọn tần, người ta mong muốn có đáp ứng pha là hàm tuyến tính theo tần số, nghĩa là:
Trong đó hoặc và là một hằng số.
Đối với bộ lọc FIR nhân quả có đáp ứng xung trong khoảng [0, M-1], thì các điều kiện tuyến tính là:
Xét phương trình sai phân (2.3) với đáp ứng xung đối xứng trong phương trình (2.6), ta có:
Cấu trúc dạng pha tuyến tính được thể hiện trong hình với M chẵn và M lẻ: trường hợp M = 6 và M = 7:
Hình 2.3 Cấu trúc bộ lọc FIR dạng pha tuyến tính. [6]
2.3 Thiết kế bộ lọc FIR bằng phương pháp cửa sổ
- Ý tưởng: ta chọn một bộ lọc lý tưởng và cắt lấy đáp ứng xung của nó để thu được bộ lọc FIR có pha tuyến tính và nhân quả. Việc cắt này được thực hiện bằng cách nhân đáp ứng xung của bộ lọc ban đầu với hàm của sổ thích hợp để thu được đáp ứng xung như mong muốn.
2.3.1 Phương pháp thiết kế
- Bước 1: Chọn loại cửa sổ sử dụng
Việc chọn loại cửa sổ sử dụng nhằm đảm bảo suy hao trong dải chắn thỏa mãn chỉ tiêu thiết kế yêu cầu. Có 6 loại cửa sổ: cửa sổ chữ nhật, cửa sổ tam giác, của sổ Hamming, cửa sổ Hanning, cửa sổ Blackman và cửa sổ Kaiser. Mỗi loại cửa sổ đều có ưu khuyết điểm riêng nên việc lựa chọn loại cửa sổ phụ thuộc vào yêu cầu và ứng dụng của bộ lọc, do đó cần dung hòa giữa việc đảm bảo được suy hao trong dải chắn theo đúng yêu cầu và đảm bảo bậc của bộ lọc đủ nhỏ.
- Bước 2: Xác định bậc M của bộ lọc
Tùy vào từng loại cửa sổ mà bậc của bộ lọc sẽ có các cách tính khác nhau.
- Bước 3: Tìm hàm của sổ w(n)
Sử dụng các hàm có sẵn trong Matlab ứng với loại cửa sổ đã chọn theo bậc bộ lọc M.
- Bước 4: Tìm đáp ứng xung của bộ lọc lý tưởng hd(n) (tương ứng với các thông số tần số của yêu cầu thiết kế).
- Bước 5: Tìm đáp ứng xung h(n) của bộ lọc thực tế
- Bước 6: Thử lại trong miền tần số
Hd() = H()*W() (2.9)
Nếu chưa thỏa mãn các chỉ tiêu kỹ thuật, ta tăng M và trở lại bước 2.
2.3.2 Nguyên tắc:
Từ đáp ứng tần số mong muốn Hd() với các chỉ tiêu tương ứng, ta lấy biến đổi Fourier ngược để có đáp ứng xung hd(n):
Đáp ứng hd(n) thu được sẽ có chiều dài vô hạn và không nhân quả, ta không thể thực hiện được trong thực tế. Do đó, hệ thống phải được sửa lại thành nhân quả và hạn chế chiều dài của hd(n). Phương pháp đơn giản nhất là cắt bỏ hd(n) từ giá trị n = (M-1), ta thu được bộ lọc FIR có chiều dài M. Việc này tương đương với việc nhân hd(n) với một hàm cửa sổ. Hàm cửa sổ được định nghĩa:
Khi đó, đáp ứng xung của bộ lọc FIR được xác định như sau:
Gọi W() là biến đổi Fourier của cửa sổ w(n), từ tính chất nhân của biến đổi Fourier ta thu được đáp ứng tần số của bộ lọc như sau:
2.3.3 Hàm truyền của các loại cửa sổ
- Cửa sổ chữ nhật:
- Cửa sổ tam giác:
- Cửa sổ Hamming:
- Cửa sổ Hanning:
- Cửa sổ Blackman;
- Cửa sổ Kaiser:
Trong đó:
với
+ As: độ suy hao trong dải chắn [dB]
+ : tần số giới hạn dải chắn
+: tần số giới hạn dải thông
Trong phương pháp này, khi nhân đáp ứng xung với hàm cửa sổ sẽ xảy ra một hiện tượng gọi là hiện tượng Gibbs và được định nghĩa như sau:
Để giới hạn chiều dài đáp ứng xung hd(n) của bộ lọc lý tưởng, ta đã nhân với hàm cửa sổ w(n). Đáp ứng tần số của bộ lọc thực tế có được từ tích chập. Đối với bộ lọc lý tưởng, đáp ứng biên độ chuyển đột ngột từ 1 xuống 0 (hoặc ngược lại) ở tần số cắt. Nhưng với bộ lọc thực tế, do tích chập trong miền tần số sẽ gây dao động ở dải thông và dải chắn xung quanh tần số cắt . Sự phát sinh các dao động này gọi là hiện tượng Gibbs.
2.4 Thiết kế bộ lọc FIR bằng phương pháp lấy mẫu tần số
2.4.1 Các đặc tính của bộ lọc FIR pha tuyến tính
Cho h(n), trong đó 0 n M-1, là đáp ứng xung có chiều dài M thì hàm truyền hệ thống là:
có đáp ứng tần số là:
Các hệ số của bộ lọc cũng chính là giá trị của các mẫu trong đáp ứng xung của nó:
2.4.1.1 Đáp ứng xung h(n)
Chúng ta có thể đưa ra ràng buộc pha tuyến tính:
Trong đó: là một hệ số trễ pha.
Bộ lọc có pha tuyến tính khi đáp ứng xung h(n) của nó thỏa mãn các điều kiện đối xứng. Có các điều kiện đối xứng như sau:
+ h(n) = h(M-n-1): đáp ứng xung đối xứng (2.27)
Với
Có hai trường hợp:
- M lẻ: trong trường hợp này, là một số nguyên. Đáp ứng xung được mô tả như hình dưới đây:
Hình 2.4 Đáp ứng xung đối xứng, M lẻ. [6]
- M chẵn: trong trường hợp này, không phải là một số nguyên. Đáp ứng xung được mô tả như hình dưới đây:
Hình 2.5 Đáp ứng xung đối xứng, M chẵn. [6]
+ h(n) = -h(M-n-1): đáp ứng xung phản đối xứng (2.28)
Với
Trong điều kiện này thì đáp ứng pha phải thỏa mãn:
Đáp ứng pha là đường thẳng nhưng không đi qua gốc. Trong trường hợp này không phải là hằng số trễ pha, nhưng:
là hằng số trễ nhóm. Các tần số được làm trễ với một tốc độ không đổi, nhưng một số tần số có thể được làm trễ với tốc độ lớn hơn hoặc nhỏ hơn.
Để có cái nhìn trực quan hơn về đáp ứng xung h(n) trong trường hợp này, ta xét các trường họp M lẻ và M chẵn:
- M lẻ: , là một số nguyên.
Hình 2.6 Đáp ứng xung phản đối xứng, M lẻ. [6]
Chú ý: mẫu h( phải bằng 0, nghĩa là .
- M chẵn: không phải là một số nguyên.
Hình 2.7 Đáp ứng xung phản đối ứng, M chẵn. [6]
2.4.1.2 Đáp ứng tần số H()
Khi tổ hợp hai loại đối xứng và phản đối xứng với M chẵn và M lẻ, ta có bốn kiểu bộ lọc FIR pha tuyến tính. Đáp ứng tần số của mỗi kiểu có biểu thức và hình dạng riêng. Để thuận tiện ta viết biểu thức H() như sau:
Trong đó là hàm đáp ứng độ lớn chứ không phải là hàm đáp ứng biên độ. Đáp ứng độ lớn là một hàm thực, có thể vừa dương vừa âm, không giống đáp ứng biên độ luôn luôn dương. Đáp ứng pha kết họp với đáp ứng biên độ là một hàm không liên tục, trong khi kết hợp với đáp ứng độ lơn là một hàm tuyến tính liên tục.
- Bộ lọc FIR pha tuyến tính loại 1: Đáp ứng xung đối xứng, M lẻ
Trong trường hợp này = 0, là một biến nguyên, và h(n) = h(M-n-1), 0M-1 thì ta có thể chứng tỏ rằng:
Trong đó:
So sánh (2.31) và (2.32), ta có:
- Bộ lọc FIR pha tuyến tính loại 2: Đáp ứng xung đối xứng, M chẵn
Trong trường hợp này = 0, h(n) = h(M-n-1), 0M-1, nhưng không phải là một biến nguyên:
Trong đó:
với n=1,2,… (2.36)
So sánh (2.31) và (2.35), ta có:
Để thực hiện tối ưu hóa, ta viết lại phương trình (2.37) dưới dạng:
Với các hệ số quan hệ tuyến tính với các hệ số như sau:
Lưu ý: tại , ta có mà không cần quan tâm đến b(n) hoặc h(n). Dó đó chúng ta không thể sử dụng loại này (h(n) đối xứng và M chẵn) đối với bộ lọc thông cao hoặc bộ lọc chắn dải.
- Bộ lọc FIR pha tuyến tính loại 3: Đáp ứng xung phản đối xứng, M lẻ
Trong trường hợp này = , là một biến nguyên, và h(n) = -h(M-n-1), 0M-1 với h, ta có:
Trong đó:
với n=1,2,…, (2.41)
So sánh (2.31) và (2.40), ta có:
Phương trình (2.42) có thể viết lại như sau;
Với các hệ số quan hệ tuyến tính với các hệ số như sau:
....………………………….. (2.44)
Lưu ý: tại và , ta có mà không cần quan tâm c(n) hoặc h(n). Hơn thế nữa, , điều đó có nghĩa là là thuần ảo. Do đó, loại bộ lọc này không thích hợp đối với việc thiết kế bộ lọc thông thấp, thông cao hoặc chắn dải.
- Bộ lọc FIR pha tuyến tính loại 4: Đáp ứng xung phản đối xứng, M chẵn
Trong trường hợp này = , h(n) = -h(M-n-1), 0M-1 với h, nhưng không phải là một biến nguyên, ta có:
............
Hình 4.5 Cấu trúc bộ lọc khi sử dụng công cụ FDAtool
4.3.1.2 Phương pháp lấy mẫu tần số
Trong phương pháp này sẽ tiến hành mô phỏng hai trường hợp:
+ Có một mẫu trong dải chuyển tiếp.
+ Có hai mẫu trong dải chuyển tiếp
Để so sánh và rút ra nhận xét khi tăng số mẫu trong dải chuyển tiếp.
vTrong dải chuyển tiếp có một mẫu:
Số điểm cần lấy mẫu đáp ứng xung của bộ lọc lý tưởng là 81, hay bậc của bộ lọc cần thiết kế là M = 81.
Kết quả như sau: As = 44 dB, Rp = 2.53 dB
Hình 4.6 Đáp ứng bộ lọc khi có 1 mẫu trong dải chuyển tiếp
vTrong dải chuyển tiếp có hai mẫu: M = 121, As = 66 dB, Rp = 0.9422 dB
Hình 4.6 Đáp ứng bộ lọc khi có 2 mẫu trong dải chuyển tiếp
Từ đây ta có nhận xét: Khi tăng số mẫu trong dải chuyển tiếp thì bậc của bộ lọc sẽ tăng rất nhanh nhưng bù lại, đáp ứng tần số của bộ lọc thu được sẽ gần với đáp ứng của bộ lọc lý tưởng hơn.
Sau đây ta sẽ tiến hành khảo sát khi tăng độ rộng dải chuyển tiếp lên xem nó ảnh hưởng như thế nào đến bộ lọc được thiết kế (ở đây ta tăng gấp đôi để thấy rõ sự thay đổi), kết quả như sau: Bậc bộ lọc M = 60.
Hình 4.7 Đáp ứng của bộ lọc khi tăng độ rộng dải chuyển tiếp
Dễ thấy răng khi tăng độ rộng dải chuyển tiếp lên thì bậc của bộ lọc giảm đi một cách rõ rệt (ban đầu độ rộng dải chuyển tiếp là 0,05 thì bậc bộ lọc M = 119, khi tăng độ rộng dải chuyển tiếp lên gấp đôi thành 0,1 thì bậc bộ lọc giảm đi một nửa còn M = 60).
4.3.2 Bộ lọc IIR
Hàm truyền của bộ lọc IIR khi tính toán thiết kế bằng tay khá phức tạp nên ở đây sẽ chỉ sử dụng công cụ FDAtool để mô phỏng kết quả thiết kế.
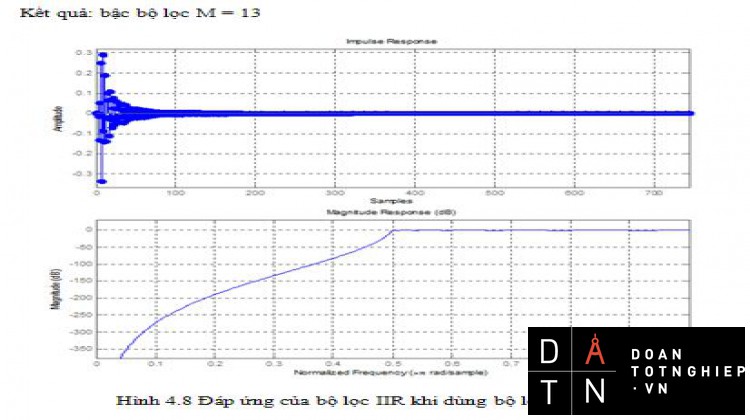
Kết quả: bậc bộ lọc M = 13
Hình 4.8 Đáp ứng của bộ lọc IIR khi dùng bộ lọc Chebyshev 1
Dễ dàng nhận thấy rằng đáp ứng xung của bộ lọc dài vô hạn, bậc bộ lọc khi tính toán là M = 15 và khi dùng FDAtool là M = 13 (gần bằng nhau) cho thấy việc tính toán thiết kế là chính xác.
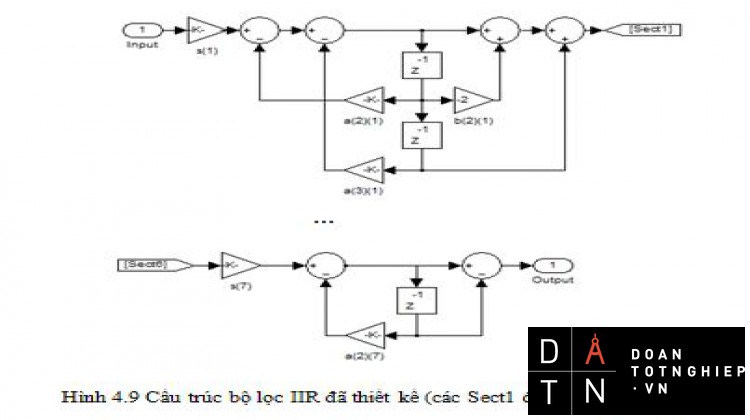
Hình 4.9 Cấu trúc bộ lọc IIR đã thiết kế (các Sect1 đến Sect5 giống Sect1)
4.4 Kết luận chương
Dựa trên cơ sở lý thuyết trong các chương trước, ở chương này đã tiến hành tính toán thiết kế bộ lọc FIR và IIR bằng một số phương pháp khác nhau, từ đó rút ra được một số nhận xét như sau:
- Bộ lọc FIR là bộ lọc có đáp ứng xung hữu hạn, có thể thiết kế một cách khá dễ dàng do việc tính toán về mặt toán học khá đơn giản. Đồng thời cũng cho ta thấy rằng: thiết kế bộ lọc FIR bằng phương pháp cửa sổ là một trong những phương pháp đơn giản nhất. Cửa sổ Kaiser có thể nói là cửa sổ tối ưu nhất nên sử dụng trong phương pháp này. Trong phương pháp lấy mẫu tần số thì việc tăng số điểm chèn vào trong dải chuyển tiếp sẽ ảnh hưởng rất lớn đến bộ lọc thiết kế. Cụ thể là bậc của bộ lọc sẽ tăng lên một cách đáng kể nhưng bù lại bộ lọc thiết kế được sẽ càng gần với bộ lọc lý tưởng. Tuy nhiên trong thực tế, người ta thường chèn nhiều nhất là 2 mẫu trong dải chuyển tiếp để đảm bảo bậc bộ lọc không quá lớn, hay nói cách khác là bộ lọc không quá cồng kềnh. Phương pháp tối ưu thì việc tính toán rất phức tạp, đòi hỏi phải có sự hỗ trợ của máy tính nên trong đồ án này không thực hiện theo phương pháp này.
- Bộ lọc IIR là bộ lọc có đáp ứng xung vô hạn, việc tính toán thiết kế trở nên phức tạp khi bậc bộ lọc là khá lớn. Nếu cùng đáp ứng một yêu cầu thiết kế thì bộ lọc IIR có bậc nhỏ hơn rất nhiều so với FIR (trong đồ án này FIR có bậc là 119 trong khi đó IIR bậc bộ lọc chỉ là 15).
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ĐỀ TÀI
vKết luận
Qua các phần đã trình bày ở trên thì chúng ta có thể nắm được các bước cơ bản cũng như những phương pháp phổ biến để tính toán thiết kế các bộ lọc số FIR và IIR. Đồ án đã trình bày quá trình tính toán thiết kế một bộ lọc số theo các chỉ tiêu cho trước theo một số phương pháp khác nhau và tiến hành mô phỏng bằng phần mềm Matlab. Từ đó khẳng định lại đặc điểm đặc trưng của bộ lọc FIR và IIR:
- Bộ lọc FIR: đáp ứng xung hữu hạn.
- Bộ lọc IIR: Đáp ứng xung vô hạn.
Đồng thời rút ra được những ưu và khuyết điểm của từng phương pháp thiết kế. Qua đó giúp chúng ta có thể lựa chọn được phương pháp thiết kế bộ lọc số phù hợp nhất theo yêu cầu và mục đích sử dụng.
Bên cạnh những gì đã thực hiện được thì đồ án vẫn còn một vài hạn chế như:
+ Chưa thực hiện thiết kế bộ lọc số với một số phương pháp (phương pháp tối ưu, phương pháp bất biến xung…).
+ Chưa thực hiện được bộ lọc trên thực tế để có cái nhìn trực quan hơn về bộ lọc số.
+ Chưa đưa bộ lọc số vào trong ứng dụng thực tế để xem xét khả năng cũng như phạm vi ứng dụng của nó.
vHướng phát triển đề tài
Một số hướng có thể phát triển như sau:
+ Đầu tiên là khắc phục những thiếu sót của đồ án này và đồng thời tiến hành thiết kế bộ lọc số theo các phương pháp khác mà ở đồ án này chưa thực hiện được.
+ Thực hiện bộ lọc số trên thực tế trên chip FPGA.
+ Ứng dụng bộ lọc số vào mã hóa băng con và giải mã băng con.
TÀI LIỆU THAM KHẢO
[1] Phùng Trung Nghĩa, Đỗ Huy Khôi,”Giáo trình xử lí tín hiệu số 2”, Khoa Công nghệ thông tin, Đại học Thái Nguyên, 2008.
[2] Monson H. Hayes, “Statistical digital signal processing and modeling”, John Wiley & Sons Inc 1996.
[3] Miroslav Vlček, Pavel Zahradník, Rolf Unbehauen, “Analytical Design of FIR Filter”, IEEE transactions on signal processing, VOL. 48, NO. 9, September 2000.
[4] Paulo S. R. Diniz, Eduardo A. B. da Silva, Sergio L. Netto, “Digital Signal Processing: System Analysis and Diesign”, Cambridge University Press 2010.
[5] Vijay K.Madisetti and Douglas B. Williams, “Digital Signal Processing Handbook”, CRC Press LLC 1999.
[6] Vinay K. Ingle, John G. Proakis, “Digital signal processing using MATLAB V.4”, PWS Publishing Company 1997.
[7] Zoran Milivojević, “Digital Filter Design”, MikroElektronika 2009.
PHỤ LỤC
vCode của phương pháp cửa sổ:
- Cửa sổ Kaiser:
wp = 0.5*pi;
ws = 0.45*pi;
As = 50;
deltaf = (wp-ws)/(2*pi);
M = ceil((As-7.95)/(14.36*deltaf)+1)
n = [0:1:M-1];
beta = 0.1102*(As-8.7);
wc = (ws+wp)/2;
hd = ideal_lp(pi,M) - ideal_lp(wc,M); %Dap ung ly tuong bo loc thong cao
w_kai = (kaiser(M,beta))'; %Ham cua so Kaiser
h = hd.*w_kai; %Tinh dap ung thuc te
[db,mag,pha,grd,w] = freqz_m(h,[1]);
d = 2*pi/1000;
Rp = -min(db((wp/d):1:501))
As = -round(max(db(1:1:ws/d)))









