ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ ỨNG DỤNG BỘ ĐIỀU KHIỂN MỜ LAI VÀ SCADA TRONG HỆ THỐNG THỬ BƠM
NỘI DUNG ĐỒ ÁN
ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ ỨNG DỤNG BỘ ĐIỀU KHIỂN MỜ LAI VÀ SCADA TRONG HỆ THỐNG THỬ BƠM
ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ ỨNG DỤNG BỘ ĐIỀU KHIỂN MỜ LAI VÀ SCADA TRONG HỆ THỐNG THỬ BƠM, thuyết minh ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ , bộ điều khiển lập trình , Lý thuyết điều khiển mờ
MỤC LỤC
Phần 1 Lý thuyết điều khiển mờ ............................................................................ 1
Chương 1 Các khái niệm cơ bản ............................................................................. 2
1. Khái niệm về tập mờ ......................................................................................... 2
2. Các phép toán trên tập mờ................................................................................ 4
3. Biến ngôn ngữ và các giá trị của nó................................................................ 8
4. Luật hợp thành mờ............................................................................................10
5. Giải mờ ...............................................................................................................15
Chương 2 Điều khiển mờ .............................................................................................21
1. Bộ điều khiển mờ cơ bản ................................................................................21
2. Những nguyên tắc tổng hợp bộ điều khiển mờ ...........................................22
3. Hệ điều khiển mờ lai .......................................................................................28
4. Chỉnh định mờ tham số bộ điều khiển PID ..................................................32
Phần 2 PLC S7-400 và Tập lệnh ..........................................................................37
Chương 1 Ngôn ngữ lập trình STL .......................................................................38
1. Cấu trúc lệnh và trạng thái kết quả ...............................................................39
2. Các lệnh cơ bản.................................................................................................45
3. Các lệnh toán học.............................................................................................55
4. Lệnh logic tiếp điểm trên thanh ghi trạng thái ............................................57
5. Lệnh đổi kiểu dữ liệu.......................................................................................62
6. Các lệnh điều khiển chương trình ..................................................................66
7. Bộ thời gian (Timer).........................................................................................71
8. Bộ đếm (Counter) .............................................................................................75
9. Kỹ thuật lập t rình..............................................................................................78
9.1. Lập trình tuyến tính và lập trình có cấu trúc ...........................................78
9.2. Tổ chức bộ nhớ CPU ....................................................................................79
9.3. Trao đổi dữ liệu giữa CPU và các modules mở rộng.............................80
9.4. Gọi khối FC ...................................................................................................81
9.5. Instance block và thủ tục gọi khối FB ......................................................81
Chương 2 Điều khiển mờ với S7 -400 ...................................................................82
1. Chương trình FCPA ...........................................................................................82
2. Sử dụng DB mờ vơi FB30 (Fuzzy Control) .................................................82
3. Module mềm PID .............................................................................................83
Chương 3 Thuật toán điều khiển PID ....................................................................93
1. Điều khiển PID liên tục ...................................................................................93
2. Dạng rời rạc của bộ điều khiển PID..............................................................95
2.1. Sự hiệu chỉnh thực tế của bộ điều khiển..................................................96
2.2. Kỹ thuật antiwindup bộ tích phân ..............................................................96
2.3. Chức năng cụ thể của các thành phần trong PID..................................101
Phần 3 HMI/SCADA (Development with iFIX/Intellution) ...........................107
1. Tổng quan.........................................................................................................108
1.1. Giới thiệu về iFIX ......................................................................................108
1.2. Thu thập dữ liệu..........................................................................................108
1.3. Quản lý dữ liệu ...........................................................................................108
2. Cấu trúc ............................................................................................................109
2.1. Giới thiệu về đồ họa (Graphics) ..............................................................109
2.2. Thẻ (Tags)....................................................................................................111
2.3. Scheduler .....................................................................................................112
2.4. Trình quản lý cơ sở d ữ liệu (Database Manager) .................................114
2.5. Báo động (Alarming) .................................................................................115
Phần 4 Thiết kế kỹ thuật sơ đồ công nghệ hệ thống thử bơm .......................117
Chương 1 Tổng quan .............................................................................................118
1. Mục đích của hệ thống thử bơm...................................................................118
2. Thuyết minh kỹ thuật .....................................................................................118
2.1. Phương trình năng lượng............................................................................118
2.2. Tổn thất dọc đường trong ống ..................................................................120
2.3. Tổn thất cục bộ trong đường ống.............................................................122
3. Phương pháp nghiên cứu và ứng dụng lý thuyết giải quyết bài toán ....126
3.1. Phương pháp nghiên cứu ...........................................................................126
3.2. Thiết kế bộ điều khiển mờ để chỉnh định tham số bộ điều khiển PID ..
.................................................................................................................127
3.3. Thiết kế mô hình và Lập trình điều khiển .............................................128
4. Hướng dẫn vận hành hệ thống .....................................................................132
5. Bảng chú giải tên của các thiết bị sử dụng ................................................133
6. Bảng Chú Giải Các Đại Lượng Vật Lý và Các Thuật Ngữ Sử Dụng ...134
Chương 2 Các thiết bị dùng trong luận văn ......................................................135
1. PLC S7-400 ......................................................................................................135
2. Combined Liquid Flow Transducer/Transmitter (Cảm biến lưu lượng) 140
3. Proportional Solenoid Valves & Modules (Van điều khiển tỉ lệ) ..........141
DIP Switch.....................................................................................................................143
4. General Purpose Pressure Transducers/ Transmitters (GEMS Transinstruments) (Cảm biến áp suất lưu lượng) ...................................................143
5. Pump (Bơm) .....................................................................................................143
6. Tủ điện..............................................................................................................144
7. Đặt cấu hình – Kết nối các thiết bị..............................................................144
7.1. Sơ đồ chung .................................................................................................144
7.2. Kết nối các thiết bị trong mạng Industrial Ethernet .............................145
7.3. Đặt cấu hình cho S7 -400 ...........................................................................149
7.4. Kết nối các thiết bị của mô hình hệ thống thử bơm vào PLC ............150
Chương 3 Chương trình chính ..............................................................................153
1. Diễn giải hệ thống..........................................................................................153
|
|
1.1. |
iFIX ...............................................................................................................153 |
|
1.2. |
Step 7 Manager ...........................................................................................153 |
|
|
1.3. |
Lưu đồ giải thuật.........................................................................................153 |
|
|
2. |
2.1. |
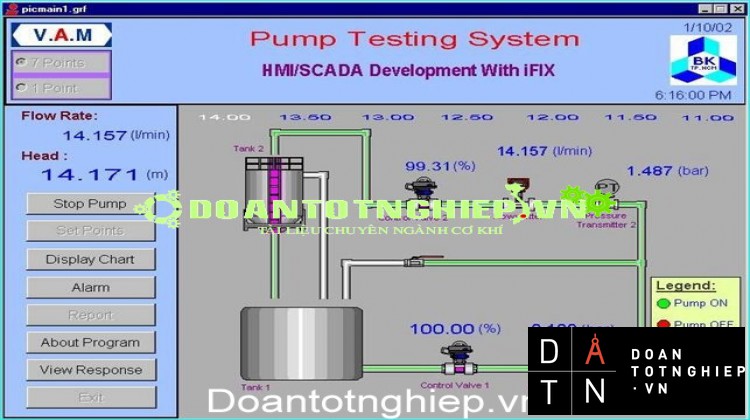
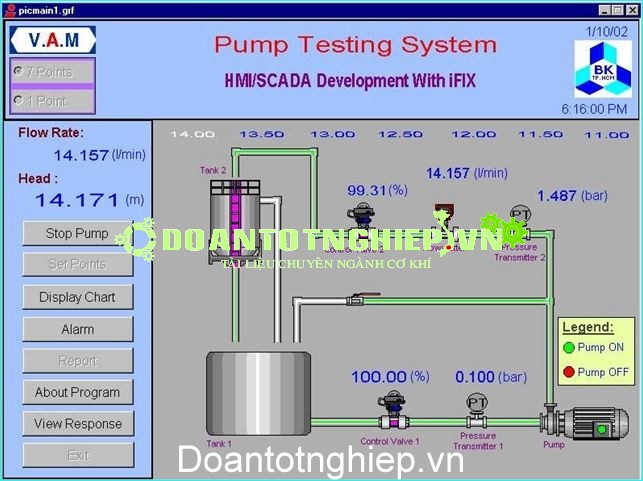
Giao diện ..........................................................................................................155 Màn hình chính............................................................................................155 |
|
|
2.2. |
Màn hình đặt giá trị....................................................................................156 |
|
|
2.3. |
Màn hình xem báo động............................................................................158 |
|
|
2.4. |
Màn hình hiển thị kết quả .........................................................................159 |
|
3. |
2.5.
3.1. |
Màn hình About Program ..........................................................................160 Chương trình điều khiển ................................................................................161 Cấu trúc chương trình.................................................................................161 |
|
|
3.2. |
Project LVTN ..............................................................................................161 |
Chương 4 Kết quả thi công và hướng mở rộng đề tài .....................................163
1. Kết quả thi công ..............................................................................................163
1.1. Điều khiển một điểm [lưu lượng] ............................................................163
1.2. Điều khiển 7 điểm [lưu lượng].................................................................165
2. Hướng mở rộng đề tài ....................................................................................168
Tài liệu tham khảo:
Phụ lục 1 : Đặc điểm kỹ thuật của một số thiết bị
Phụ lục 2 : Chương trình điều khiển hệ thống viết trên iFIX V2.21
Phụ lục 3 : Chương trình điều khiển hệ thống viết trên Step7
GIỚI THIỆU ĐỀ TÀI
Những năm đầu của thập kỷ 90, một ngành điều khiển kỹ thuật mới được phát triển rất mạnh mẽ và đã đem lại nhiều thành tựu bất ngờ trong lĩnh vực điều khiển, đó là điều khiển mờ. Ưu điểm cơ bản của điều khiển mờ so với các phương pháp điều khiển kinh điển là có thể tổng hợp được bộ điều khiển mà không cần biết trước đặc tính của đối tượng một cách chính xác.
Trong thực tế để phát huy hết ưu điểm của mỗi loại bộ điều khiển mờ và bộ điều khiển rõ (kinh điển), người ta thường dùng các hệ kết hợp giữa hai loại bộ điều khiển truyền thống và điều khiển mờ với nhau, ta gọi đó là bộ điều khiển mờ lai.
Từ đó, việc kết hợp giữa bộ điều khiển kinh điển và bộ điều khiển mờ chính là cơ sở lý thuyết cho đề tài này.
Một trong những đơn vị nghiên cứu và ứng dụng các thành tựu khoa học đã đưa cơ sở lý thuyết này vào ứng dụng thực tế, công ty TNHH TM&DV Vinh Nam, với dự án Hệ thống thử bơm và Máy nén khí, được lắp đặt tại xí nghiệp liên doanh VietsoPetro.
Quasự giới thiệu của thầy Phan Nguyễn Phục Quốc, những người thực hiện đã được công ty giao cho việc thực hiện một mô hình Demo thu nhỏ của dự án (dĩ nhiên là đơn giản hơn hệ thống thật) với tên gọi “ỨNG DỤNG BỘ ĐIỀU KHIỂN MỜ LAI VÀ SCADA TRONG HỆ THỐNG THỬ BƠM” với mục đích thử nghiệm thành công cơ sở lý thuyết này. Bên cạnh đó, những người thực hiện còn nghiên cứu ứng dụng SCADA (Supersisory Control And Data Acquisition) vào việc điều khiển và giám sát cũng như thu thập số liệu của hệ thống.
Hệ thống thử bơm là một hệ thống có quán tính lớn, các thông số của hệ
thống lại hoàn toàn không biết trước, vì thế để điều khiển hệ thống, những người thực hiện đã kết hợp giữa bộ điều khiển kinh điển PID và lý thuyết điều khiển mờ để hệ thống có thể tự chỉnh định các thông số của nó nhằm đưa hệ thống đạt được yêu cầu của bài toán.
Nhận thấy tầm ứng dụng to lớn của PLC SIMATIC S7 -400 sẵn có tại công
ty và phần mềm rất hiệu quả Step7, những người thực hiện đã tranh thủ đưa vào ứng dụng cho hệ thống của mình.
..........................................................................
Như vậy, nội dung của luận văn gồm những phần chính như sau:
Cơ sở lý thuyết:
Phần 1: Lý thuyết điều khiển mờ
Phần 2: PLC SIMATIC S7-400 và Tập lệnh
Phần 3: HMI/SCADA (Development with iFIX – Intellution)
Ứng dụng – Vận hành
Phần 4: Thiết kế kỹ thuật sơ đồ công nghệ hệ thống thử bơm
Việc gì cũng có khó khăn, trở ngại của nó, không nhiều thì ít (thời gian, thiết bị,...) và do đó, sai sót, khuyết điểm,…... là điều không tránh khỏi. Những người thực hiện kính mong quý thầy cô cũng như các anh chị trong công ty thông cảm và lượng thứ. Mọi ý kiến góp ý, những người thực hiện đều xin ghi nhận.
Cuối cùng, những người thực hiện xin chân thành cảm ơn tất cả.
Chương
CÁC KHÁI NIỆM CƠ BẢN1. KHÁI NIỆM VỀ TẬP MỜ
1.1. Định nghĩa tập mờ
Hàm phụ thuộc flA (x) định nghĩa trên tập A được định nghĩa trong tập hợp kinh điển chỉ có hai giá trị là 1 nếu x thuộc A hoặc 0 nếu x không thuộc A. Ta thấy cách biểu diễn như vậy sẽ không phù hợp với những tập mô tả “mờ” như tập B gồm các số thực dương nhỏ hơn nhiều so với 6
B ={ x R | x << 6 } (1.1)
Hoặc tập C gồm các số thực gần bằng 3
C ={ x R | x 3 } (1.2)
Lý do với những định nghĩa mờ như vậy chưa đủ để xác định được một số x=3,5 có thuộc B hay không hoặc x=2,5 có thuộc C hay không. Nếu đã không khẳng định được x=3,5 có thuộc B hay không thì cũng không thể khẳng định được x=3,5 không thuộc B. Vậy thì x=3,5 thuộc B bao nhiêu phần trăm?. Giả sử rằng câu trả lời đó có thì hàm phụ thuộc µ B(x) tại điểm x=3,5 phải có một giá trị trong
khoảng [0,1], tức là
Hàm số cho biết độ phụ thuộc của các phần tử vào tập mờ gọi là hàm liên thuộc.
Như đã trình bày ở phần trước, từ phát biểu mô tả tập hợp kinh điển ta hoàn toàn có thể suy ra hàm đặc trưng của tập hợp. Trái lại từ phát biểu mô tả tập hợp mờ ta không thể suy ra hàm liên thuộc. Do đó hàm liên thuộc phải được nêu lên như là một điều kiện trong định nghĩa tập mờ.
Định nghĩa 1.1: Tập mờ F xác định trên tập kinh điển M là một tập mà mỗi phần tử của nó là một cặp các giá trị (x, F(x)) trong đó x M và F là ánh xạ .
[0, 1] (1.4)
Ánh xạ F (x) được gọi là hàm liên thuộc (hoặc hàm phụ thuộc) của tập mờ
F. Tập kinh điển mờ được gọi là cơ sở của tập mờ F.
Sử dụng các hàm liên thuộc để tính độ phụ thuộc của một phần tử x n ào đó có hai cách: tính trực tiếp (nếu F(x) cho trước dưới dạng công thức tường minh) hoặc tra bảng (nếu F(x) cho dưới dạng bảng).
Các hàm liên thuộc thường có dạng trơn được gọi là hàm liên thuộc kiểu S. Đối với hàm liên thuộc kiểu S do các công thức biểu diễn F(x) có độ phức tạp lớn nên thời gian tính độ phụ thuộc cho một phần tử lâu. Bởi vậy trong kỹ thuật điều khiển mờ thông thường các hàm liên thuộc kiểu S hay được thay gần đúng bằng một hàm tuyến tính từng đoạn và được gọi là hàm liên thuộc có mức.
..............................................................
Chương
2 ĐIỀU KHIỂN MỜ
Điều khiển mờ chiếm một vị trí rất quan trọng trong điều khiển học kỹ thuật hiện đại. Ngay từ buổi đầu tiên, điều khiển mờ đã đem lại sự ngạc nhiên đáng kể hoàn toàn trái với tên gọi của nó, kỹ thuật điềukhiển này đồng nghĩa với độ chính xác và khả năng thực hiện. Tuy là ngành kỹ
thuật điều khiển non trẻ nhưng những ứng dụng trong công nghiệp của điều khiển mờ thật rộng rãi như: điều khiển nhiệt độ, điều khiển giao thông vận tải, điều khiển trong các lĩnh vực hàng hóa dâ n dụng...
So với các giải pháp kỹ thuật từ trước đến nay được áp dụng để tổng hợp bộ điều khiển, phương pháp tổng hợp hệ thống bằng bộ điều khiển mờ chỉ ra những ưu điểm rõ rệt sau đây:
Khối lượng công việc thiết kế giảm đi nhiều do không cần sử dụng mô hình đối tượng trong việc tổng hợp hệ thống.
Bộ điều khiển mờ dễ hiểu hơn so với các bộ điều khiển khác (cả về kỹ thuật) và dễ dàng thay đổi.
Đối với các bài toán thiết kế có độ phức tạo cao, giải pháp dùng bộ điều khiển mờ cho phép giảm khối lượng tính toán và giảm giá thành sản phẩm. Trong nhiều trường hợp bộ điều khiển mờ làm việc ổn định hơn, bền vững hơn và chất lượng điều khiển cao hơn.
1. BỘ ĐIỀU KHIỂN MỜ CƠ BẢN
Một bộ điều khiển mờ cơ bản gồm ba thành phần cơ bản: Khâu Fuzzy hóa
Thiết bị thực hiện luật hợp thành
Khâu giải mờ
Do bộ điều khiển mờ cơ bản chỉ có khả năng xử lý các giá t rị tín hiệu hiện thời nên nó thuộc nhóm các bộ điều khiển tĩnh. Tuy vậy để mở rộng miền ứng dụng của chúng vào các bài toán điều khiển động, các khâu động học cần thiết sẽ được nối thêm vào bộ điều khiển mờ cơ bản. Các khâu động đó chỉ có nhiệm vụ cung cấp thêm cho bộ điều khiển mờ cơ bản các giá trị đạo hàm hay tích phân của tín hiệu. Cùng với những khâu động bổ sung này, bộ điều khiển cơ bản sẽ
được gọi là bộ điều khiển mờ
NHỮNG NGUYÊN TẮC TỔNG HỢP BỘ ĐIỀU KHIỂN MỜ
2.1. Định nghĩa các biến vào ra
Trong ví dụ này, việc định nghĩa các biến vào ra cho bộ hợp thành mờ tương đối đơn giản. Đại lượng vào của bộ điều khiển mờ chình là sai lệch ( được ký hiệu bằng ET) giữa nhiệt độ cần giữ ổn định (tín hiệu chủ đạo x) và nhiệt độ thực y (nhiệt độ đo được từ bộ cảm biến tín hiệu ra của đối tượng). Ngoài ra trong bộ
điều khiển mờ còn sử dụng đến sự biến đổi theo thời gian của sai lệch (đạo hàm
d ET ) giữa tín hiệu chủ đạo và tín hiệu ra của đối tượng (ký hiệu bằng DET).
Công suất sưởi nóng hay làm mát P là biến ra của bộ điều khiển. P là một
giá trị rõ. Bên trong, thuộc phần giao diện đầu ra, bên cạnh khâu giải mờ bộ điều
khiển còn phải sử dụng khâu tích phân để biến đổi giá trị
2.2. Xác định tập mờ
Bước tiếp theo là định nghĩa các biến vào/ra bao gồm số các tập mờ và dạng các hàm liên thuộc của chúng. Để làm được điều đó cần xác định:
1. Miền giá trị vật lý (cơ sở) của các biến ngôn ngữ vào/ra
Sai lệch nhiệt độ ET được chọn trong miền giá trị từ –12oC dến +12oC, tốc độ biến đổi DET của sai lệch có giá trị biến đổi từ –6oC/s dến +6oC/s và tốc độ biến đổi công suất ra DP nằm trong khoảng –120W/s dến +120W/s.
2. Số lượng tập mờ (giá trị ngôn ngữ)
Về nguyên tắc, số lượng các giá trị ngôn ngữ cho mỗi biến ngôn ngữ nên nằm trong khoảng từ 3 đến 10 giá trị. Nếu số lượng giá trị ít hơn 3 thì có ít ý nghĩa, vì không thực hiện được việc lấy vi phân. Nếu lớn hơn 10, con người khó có khả năng bao quát, vì con người phải nghiên cứu đầy đủ để đồng thời phân
biệt khoảng 5 đến 9 phương án khác nhau có khả năng lưu trữ trong một thời gian ngắn. Đối với quá trình điều khiển nhiệt độ, có thể xác định các giá trị sau:
ET { âm, không, dương} hoặc
ET { âm, âm ít, không, dương ít, dương} hoặc
ET { âm nhiều, âm, âm ít, không, dương ít, dương, dương nhiều}
Sau đây, những tên gọi giá trị ngôn ngữ trên sẽ được dùng một ký hiệu ngắn gọn suy ra từ tiếng Anh như sau:
Am nhiều – NB (Negativ Big), Am – NM (Negativ Medium), Am ít – NS (Negativ Small), Không – ZE (Zero),
Dương ít – PS (Positiv Small),
Dương– PM (Positiv Medium),
Dương nhiều – PB (Positiv Big).
Với những ý hiệu như vậy thì miền xác định (ngôn ngữ) của các biến vào ra sẽ là:
ET { NB, NM, NS, ZE, PS, PM, PB }, DET { NB, NM, NS, ZE, PS, PM, PB }, DP { NB, NM, NS, ZE, PS, PM, PB }.
3. Xác định hàm liên thuộc
Đây là một điểm cực kỳ quan trọng vì quá trình làm việc của bộ điều khiển rất phụ thuộc vào dạng và kiểu hàm liên thuộc. Đáng tiếc là không có một lời khuyên nào khác cho việc chọn hàm liên thuộc là hãy chọn hàm liên thuộc từ những dạng hàm đã biết trước và mô hình hóa nó cho đến k hi nhận được bộ điều khiển mờ làm việc như mong muốn.
Cần chọn hàm liên thuộc có dạng chồng lên nhau và phủ kín miền giá trị vật lý để trong quá trình điều khiển không xuất hiện “lỗ hổng”. Trong trường hợp với một giá trị vật lý rõ x0 của biến đầu vào mà tập mờ B’ đầu ra có độ cao bằng 0 (miền xác định là một tập rỗng) và bộ điều khiển không thể đưa ra một quyết định điều khiển nào được gọi là hiện tượng “cháy nguyên tắc”, lý do là hoặc không định nghĩa được nguyên tắc điều khiển phù hợp hoặc là do các tập mờ của biến ngôn ngữ có những “ lỗ hổng”
Cũng như vậy đối với biến ra, các hàm liên thuộc dạng hình thang với độ cao xếp chồng lên nhau rất nhỏ, nhìn chung không phù hợp đối với bộ điều khiển
4. Rời rạc hóa các tập
Độ phân giải các giá trị phụ thuộc được chọn trước hoặc là cho các nhóm điều khiển mờ loại dấu phẩy động (các số biểu diễn dưới dạng dấu phẩy động chính xác hơn ) hoặc nguyên ngắn (giá trị phụ thuộc là các số nguyên có độ dài 2 byte) hoặc theo byte (các giá trị phụ thuộc là các số không dấu có độ dài 1 byte). Những khả năng để tổng hợp các hệ thống rất khác nhau tùy theo l oại linh kiện của mỗi hãng. Phương pháp rời rạc hóa sẽ là yếu tố quyết định giữa độ chính xác và tốc độ điều khiển.
2.3. Xây dựng các luật điều khiển
Trong việc xây dựng các luật điều khiển (mệnh đề hợp thành) cần lưu ý là ở vùng lân cận điểm không (ví dụ như trong trường hợp DT=ZE) không được tạo ra các “lỗ hổng”, bởi vì khi gặp phải các “lỗ hổng” xung quanh diểm làm việc bộ điều khiển sẽ không làm việc đúng như theo trình tự đã định.
Ngoài ra cần để ý rằng, trong phần lớn các bộ điều khiển, tín hiệu ra sẽ bằng không nếu như tất cả các tín hiệu vào bằng không.
· Những nguyên tắc sau đây được đặt ra cho bộ điều khiển nhiệt độ
....................................................................................
2.5. Chọn nguyên lý giải mờ
Các phương pháp xác định đầu ra rõ, hay còn gọi là quá trình giải mờ hoặc rõ hóa đã được trình bày trong chương 1. Phương pháp giải mờ được chọn cũng
gây ảnh hưởng đến độ phức tạp và trạng thái làm việc của toàn bộ hệ thống. Thường trong thiết kế hệ thống điều khiển mờ, giải mờ bằng phương pháp điểm trọng tâm có nhiều ưu điểm hơn cả, bởi vì như vậy trong kết quả có sự tham gia của tất cả kết luận của các luật điều khiển Rk, k=1,2,..., 13 (mệnh đề hợp thành)
2.6. Tối ưu
Sau khi bộ điều khiển mờ đã được tổng hợp, có thể ghép nối nó với đối tượng điều khiển thực hoặc một đối tượng mô phỏng để thử nghiệm. Trong quá trình thử nghiệm cần đặc biệt kiểm tra xem có tồn tại “lỗ hổng” nào trong quá trình làm việc hay không, tức là phải xác định xem tập các luật điều khiển được xây dựng có đầy đủ hay không để khắc phục. Nguyên nhân của hiện tượng “lỗ hổng” có thể do việc thiết lập các nguyên tắc điều khiển chung quanh điểm làm việc không phủ lên nhau hoàn toàn, hoặc là có một số kết quả sai trong các nguyên tắc điều khiển được thiết lập. Một nguyên nhân nữa có thể xảy ra là bộ điều khiển làm việc không ổn định, vì nó nằm quá xa điểm làm việc. Trong mọi trường hợp nên xem lại các luật điều khiển cơ sở.
Sau khi đã đảm bảo được bộ điều khiển làm việc ổn định và không có các “lỗ hổng”, bước tiếp theo là tối ưu trạng thái làm việc của nó theo các chỉ tiêu khác nhau. Chỉnh định bộ điều khiển theo các chỉ tiêu này chủ yếu được thực hiện thông qua việc hiệu chỉnh hàm liên thuộc và thiết lập thêm các nguyên tắc điều khiển bổ sung hoặc sửa đổi lại các ngyên tắc điều khiển đã có. Việc chỉnh định sẽ rất có kết quả nếu như thực hiện trên một hệ kín.
Khi xử lý các kết quả chỉnh định cần đặc biệt để ý khi các hệ thống không phụ thuộc vào thời gian hoặc các hệ thống có hằng số thời gian trễ Tt lớn. Những tính chất này của hệ sẽ làm cho các biến đổi k hi chỉnh định thường khó nhận biết. Trong các trường hợp đó tốt hơn là nên thực hiện từng bước và ghi lại biên bản cho mọi trường hợp.
3. HỆ ĐIỀU KHIỂN MỜ LAI
3.1. Khái niệm
Trong thực tế để phát huy hết ưu điểm của mỗi loại bộ điều khiển mờ và bộ điều khiển rõ, người ta thường dùng các hệ kết hợp giữa hai loại bộ điều khiển truyền thống và điều khiển mờ với nhau, do vậy ta có các hệ điều khiển mờ lai. Ta xét hệ điều khiển có cấu trúc hai vòng, một trong hai vòng đó dùng bộ điều khiển mờ. Ta thấy có hai khả năng nối: bộ điều khiển mờ dùng ở vòng thứ nhất, còn vòng thứ hai là bộ điều khiển không mờ (hình 2.4a) hoặc vòng thứ nhất là bộ điều khiển truyền thống (chẳng hạn bộ điều khiển PID) và vòng thứ hai là bộ điều khiển mờ (hình 2.4b)
............................................................
Chương
1. KẾT QUẢ THI CÔNG
Mặc dù gặp không ít khó khăn trong việc nghiên cứu và thực thi nội dung của đề tài, những người thực hiện cuối cùng cũng đã hoàn thành được nhiệm vụ tuy rằng không được hoàn hảo như ý.
Phần cứng
- Lắp ráp thành công mô hình hệ thống thử bơm
- Kết nối thành công mạng Industrial Ethernet gồm 1 PC và 1 PLC S7-400
Phần mềm
- Thiết kế giao diện giám sát, điều khiển quá trình vận hành hệ thống bơm bằng iFIX V2.21
- Lập trình điều khiển lưu lượng nước bằng Step7, ứng dụng điều khiển mờ và thuật toán hiệu chỉnh PID ( hệ mờ lai): đạt yêu cầu
- Liên kết dữ liệu giữa Step7 – iFIX - Excel
1.1. Điều khiển một điểm [lưu lượng]
Qsp = 11 [l/min] Đáp ứng của hệ thống
Hình sau mô tả đáp ứng của hệ thống
- Hình trên
Đường xanh – Giá trị lưu lượng thực tế đọc về lừ Flowmetter
Đường đỏ – Giá trị lưu lượng đặt
- Hình dưới
Đường hồng – Độ mở Control Valve 2
.................................................
ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ ỨNG DỤNG BỘ ĐIỀU KHIỂN MỜ LAI VÀ SCADA TRONG HỆ THỐNG THỬ BƠM
ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ ỨNG DỤNG BỘ ĐIỀU KHIỂN MỜ LAI VÀ SCADA TRONG HỆ THỐNG THỬ BƠM, thuyết minh ĐỒ ÁN TỐT NGHIỆP ĐIỆN TỬ , bộ điều khiển lập trình , Lý thuyết điều khiển mờ









