ĐỒ ÁN TỐT NGHIỆP Giao tiếp và điều khiển tay máy bốn bậc tự do






NỘI DUNG ĐỒ ÁN
MỤC LỤC
Chương 1: Nhiệm vụ và yêu cầu .................................................................... 7
I. Nhiệm vụ. ............................................................................................. 7
II. Yêu cầu................................................................................................. 7
Chương 2 : Giới thiệu tổng quan .................................................................... 8
I. Đặc vấn đề. ........................................................................................... 8
II. Sơ lược về robot công nghip................................................................ 8
III. Mục tiêu đề tài.................................................................................... 23
Chương 3 : Vi điều khiển P89V51 của philips ............................................. 24
I. Giới thiệu tổng quát. ........................................................................... 24
II. Các chức năng của P89V51. ............................................................... 26
III. Sơ đồ khối của P89V51....................................................................... 26
IV. Mô tả các chức năng cơ bản................................................................ 27
V. Mã lệnh của P89V51 Philips............................................................... 33
Chương 4 : Vi điều khiển AVR ATmega8515 ............................................. 40
I. Tổng quát về AVR ATmega8515. ...................................................... 40
II. Cấu trúc của AVR............................................................................... 44
III. Tập lệnh.............................................................................................. 61
Chương 5 : So snh chức năng giữa P89V51 v MCS-51 ............................ 80
1. Chức năng. ....................................................................................... 80
2. Cấu trc phần cứng. ......................................................................... 80
3. Tổ chức bộ nhớ. ............................................................................... 81
Chương 6 : Hoạt động định thời của AVR ................................................... 82
I. Timer/counter 8 bit. ............................................................................ 82
II. Timer/counter 16 bit. .......................................................................... 86
Chương 7: Hoạt động của port nối tiếp ....................................................... 91
I. Bộ tạo xung clock. .............................................................................. 91
II. Định dạng khung................................................................................. 93
III. Khởi tạo USART................................................................................. 94
IV. Truyền dữ liệu. ................................................................................... 94
V. Thu dữ liệu.......................................................................................... 95
VI. Thu dữ liệu khơng đồng bộ ................................................................ .96
VII. Chế độ truyền thơng đa xử lý.............................................................. 96
VIII. Truy xuất thanh ghi UBRRH/ UCSRC................................................ 97
Chương 8 : Hoạt động ngắt .......................................................................... 98
I. Mở đầu................................................................................................ 98
II. Hoạt động ngắt của AVR .................................................................... 98
III. Các thanh ghi điều khiển ngắt .......................................................... 101
Chương 9: Chương trình Studio ................................................................. 103
I. Giới thiệu. ......................................................................................... 103
II. Chương trình. ................................................................................... 104
Chương 10: Các loại động cơ ...................................................................... 107
I. Các loại động cơ dng cho Robot ..................................................... 107
II. Động cơ bước .................................................................................... 107
III. Động cơ DC ...................................................................................... 111
IV. Động cơ Servo S3003 ....................................................................... 113
Chương 11: Hiển thị dng LCD .................................................................. 116
I. Giới thiệu. ......................................................................................... 116
II. Tổng quan về LCD. .......................................................................... 116
III. Cấu tạo.............................................................................................. 117
IV. Lệnh điều khiển v hiển thị cho LCD............................................... 119
V. Chế độ hoạt động của LCD............................................................... 120
VI. Khởi tạo LCD. .................................................................................. 121
VII. Bảng m LCD. .................................................................................. 123
VIII. Hình dạng thực của LCD. ................................................................. 123
Chương12: Thiết kế board điều khiển ...................................................... 125
I. Sơ đồ khối. ........................................................................................ 125
II. Khối nguồn. ...................................................................................... 125
III. Khối vi xử lý, truyền thông và cảm biến........................................... 127
Chương 13 : Lưu đồ giải thuật điều khiển................................................. 130
1. Lưu đồ chương trình chính. ............................................................ 130
2. Lưu đồ khởi tạo LCD ..................................................................... 131
3. Lưu đồ ghi dữ liệu vo LCD .......................................................... 132
4. Lưu đồ hiển thị LCD ...................................................................... 133
5. Lưu đồ thu cất dữ liệu .................................................................... 134
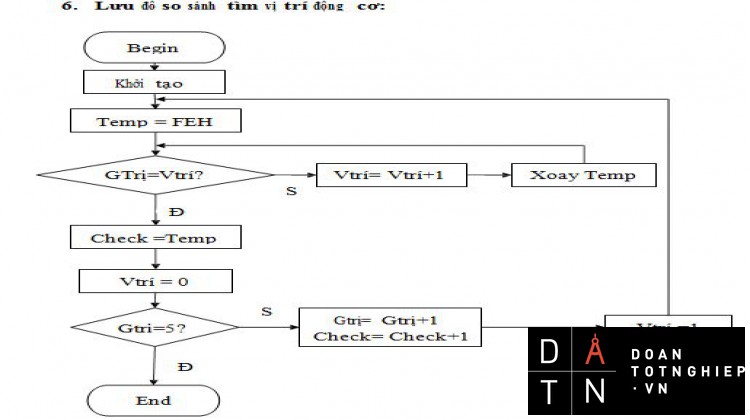
6. Lưu đồ so sánh tìm vị trí động cơ ................................................... 135
7. Lưu đồ chương trình co xuất xung.................................................. 136
Chương kết luận: ........................................................................................ 137
I. Ứng dụng .......................................................................................... 137
II. Thuận lợi –khó khăn ......................................................................... 137
III. Ưu khuyết điểm ................................................................................ 137
IV. Nhận xét ........................................................................................... 138
V. Hướng phát triển ............................................................................... 138
Ti liệu tham khảo ...................................................................................... 139
Phụ lục.......................................................................................................... 140
Phụ lục A ............................................................................................. 140
Phụ lục B ............................................................................................. 149
Phụ lục C ............................................................................................. 151
Phụ lục D ............................................................................................. 153
LỜI NÓI ĐẦU
Ngày nay, khoa học kỹ thuật đang tiến những bước thần kì và đạt được những thành tựu rực rỡ. Nhiều công trình nghiên cứu khoa học đã ra đời trong nhiều lĩnh vực: viễn thông, điện tử, tự động hóa… trong đó, vi xử lý đóng vai trò chủ chốt. Các công trình nghiên cứu đòi hỏi người thực hiện phải có lòng đam mê, sáng tạo ra những ý tưởng mới lạ ứng dụng vào thực tế để phục vụ con người.
Vi xử lý đã trở nên quen thuộc trong các ngành công nghiệp và trong dân dụng. Từ các dây chuyền sản xuất lớn cho đến các thiết bị gia dụng, chúng ta đều thấy sự hiện diện của vi điều khiển. Các bộ vi điều khiển có khả năng xử lí nhiều hoạt động phức tạp mà chỉ cần một vi chip nhỏ, nó đã thay thế các thiết bị điều khiển lớn và phức tạp bằng những mạch điện gọn nhẹ, dễ dàng thao tác và sử dụng.
Với vi xử lý, con người có thể tạo ra nhiều thiết bị hữu ích, với những chương trình được viết theo ý muốn người sử dụng. Từ những chương trình này, thiết bị được điều khiển sẽ hoạt động một cách tự động không cần sự điều khiển trực tiếp của con người. Không chỉ có thế, thiết bị có thể hoạt động theo nhiều hướng khác nhau, tùy thuộc vào chương trình và được sử dụng một cách dễ dàng.
Đề tài “GIAO TIẾP VÀ ĐIỀU KHIỂN TAY MÁY 4 BẬC TỰ DO”
ứng dụng vi xử lý để điều khiển động cơ servo
Dù nhóm đã cố gắng vận dụng những kiến thức đã được học và tìm thêm kiến thức mới về AVR Atmega8515 và P89V51 của Philips. Nhưng do thời gian và kiến thức còn hạn chế nên đề tài chưa phát triển tối ưu và trong quá trình thực hiện còn không tránh khỏi những thiếu xót, rất mong quí thầy cô thông cảm, đóng góp ý kiến để đề tài được hoàn chỉnh hơn.
CHƯƠNG 1 NHIỆM VỤ_YÊU CẦU
I. Nhiệm vụ:
Phòng Cơ Điện Tử của trường đã lắp đặt mô hình dây chuyền sản xuất (Xylanh tác động đơn có lò xo) tự động được chuyển giao bởi hãng FESTO của Đức. Đây là mô hình lắp ráp xylanh được điều khiển một cách tự động từ khâu đầu tiên là cung cấp phôi cho đến khâu cuối cùng là sắp xếp sản phẩm và lưu kho. Mỗi trạm của hệ thống có một nhiệm vụ riêng, có thể hoạt động độc lập hoặc kết hợp chặt chẽ với nhau tạo thành một hệ thống hoàn chỉnh và logic.
Dây chuyền sản xuất này có thể nói là khá hoàn chỉnh và tối ưu và nó được hoàn chỉnh hơn khi các bạn ở khóa trước đã thiết kế, chế tạo mô hình hệ thống lưu kho tự động đã đóng góp thêm một phần vào công việc giảng dạy của trường. Tuy nhiên trên dây chuyền vẫn còn một số vị trí còn thiếu cơ cấu cần thiết nên vẫn thực hiện bằng tay. Nếu có thêm một hệ thống mô hình có thể thay thế tay người và đặt ở bất cứ nơi nào trên dây chuyền. Mặt dù trên dây chuyền đã có một tay máy do Nhật sản xuất và đặt ở vị trí cố định ở trạm 6 có nhiệm vụ lắp ráp sản phẩm, tuy nhiên tay máy này chỉ được đặt cố định và kích thước hơn lớn nên không thể di chuyển hoặc lắp đặt ở những vị trí có không gian hẹp trên dây chuyền. Để dây chuyền có thể hoạt động hiệu quả hơn, tối ưu hơn. Hoặc ta có thể nâng cao tính tối ưu của dây chuyền bằng việc ứng dụng tay máy để có thể thiết kế thêm mô hình đóng gói sản phẩm bên cạnh mô hình lưu kho. Do đó cần phải có một tay máy thích hợp ở các vị trí đó. Đồng thời tay máy được thiết kế, chế tạo và lắp ráp bằng những thiết bị, máy móc của trường để làm mô hình phục vụ cho việc giảng dạy.
Để bổ sung cho hệ thống MPS này chúng em được thầy Hoàng Hữu Phương hướng dẫn làm đồ án tốt nghiệp với đề tài “giao tiếp và điều khiển tay máy bốn bậc tự do” có thể đáp ứng được những yêu cầu như cung cấp phôi, lấy phôi không đạt yêu cầu, sắp xếp sản phẩm vào kho….
II. Yêu cầu:
Yêu cầu cần thiết của tay máy này là phải nhỏ gọn, không phức tạp để có thể đặt ơ nhiều vị trí trên dây chuyền. Các vật liệu, linh kiện lắp tay máy phải có giá rẻ, dễ tìm, bền và sử dụng được lâu dài. Tay máy có thể giao tiếp với các thiết bị khác trên dây chuyền, có thể điều khiển tự động bằng cách lập trình, có thể điều khiển bằng tay và đặc biệt là có thể hoạt động độc lập hoặc đồng bộ với các thiết bị khác trên dây chuyền.
CHƯƠNG 2 GIỚI THIỆU TỔNG QUAN
I. Đặt vấn đề:
Ngày nay, những ứng dụng của vi điều khiển đã đi sâu vào đời sống sinh hoạt và sản xuất của con người. Thực tế là hầu hết các thiết bị điện dân dụng hiện nay đều có sự góp mặt của VI ĐIỀU KHIỂN và VI XỬ LÝ. Ứng dụng vi điều khiển trong thiết kế hệ thống làm giảm chi phí thiết kế và hạ giá thành sản phẩm đồng thời nâng cao tính ổn định của các thiết bị và hệ thống.
Trên thị trường có rất nhiều họ vi điều khiển như: 8051 của Atmel,
68HC11 của Motorola, Z80 của Eilog, PIC của Microchip, H8 của Hitachi… và
AVR của Atmel.
AVR là họ vi điều khiển khá mới mẽ trên thị trường cũng như đối với người sử dụng. Đây là họ vi điều khiển được chế tạo theo kiến trúc RISC có cấu trúc khá phức tạp. Ngoài các tính năng như các bộ vi điều khiển khác, AVR còn tích hợp nhiều tính năng mới rất tiện lợi cho người thiết kế và lập trình.
Sự ra đời của AVR bắt nguồn từ yêu cầu thực tế là hầu hết khi cần lập trình cho vi điều khiển, chúng ta thường dùng những ngôn ngữ bậc cao HLL (Hight lever language) để lập trình ngay cả với loại chip xử lý 8 bit. Trong đó ngôn ngữ C là ngôn ngữ phổ biến nhất, tuy nhiên khi biên dịch thì kích thước đoạn mã sẽ tăng nhiều so với ngô ngữ Assembly. Hãng Atmel nhận thấy rằng phải phát triển một cấu trúc đặc biệt cho ngôn ngữ C để giảm thiểu sự chênh lệch kích thước mã đã nói trên. Và kết quả là họ vi điều khiển AVR ra đời với việc làm giảm kích thước đoạn mã khi biên dịch và thêm vào đó là thực hiện lệnh đúng hơn chu kỳ máy với 32 thanh ghi tích lũy và đạt tốc độ nhanh hơn các họ vi điều khiển khác từ 4 đến 12 lần. Vì thế nghiên cứu AVR là một đề tài khá lý thú và giúp cho sinh viên biết thêm một họ vi điều khiển thuộc loại mạnh hiện nay.
II. Sơ lược về Robot công nghiệp:
Ngày nay khi đất nước chúng ta đang bước vào thời đại công nghiệp hóa hiện đại hóa, nền sản xuất ngày càng mang tính tự động cao nên vấn đề đặt ra là phải có một công cụ hỗ trợ đắc lực cho con người. Tay robot là một thiết bị khá phổ biến trong các dây chuyền sản xuất tự động. Đặc biệt trong các dây chuyền lắp ráp tự động cần có độ chính xác và năng xuất làm việc cao. Điều khiển cánh tay robot là một đề tài có nhiều ứng dụng trong thực tế nhất là trong lĩnh vực công nghiệp với các dây chuyền sản xuất tự động không cần bàn tay của con người, chủ yếu là trong công nghiệp hoá chất.
Người máy (robot) được coi là những máy móc có khả năng hoạt động như con người, trước hết là chúng thay thế con người làm những công việc nặng nhọc trong môi trường độc hại. Người máy là sản phẩm cao cấp của nền kỹ thuật thế giới trong thế kỷ 20 trên cơ sở kết hợp những thành tựu về kỹ thuật điều khiển số (NC), kỹ thuật điều khiển vô cấp, kỹ thuật điện toán, kỹ thuật vi điện tử, đặc biệt là kỹ thuật vi xử lý và hệ điều khiển lập trình linh hoạt.
Người máy công nghiệp viết tắt là IR, được đưa ra thị trường vào năm
1961. Đó là robot UNIMAT USA. Cho đến nay, trên thế giới đã có khoảng 200 công ty chế tạo với khoảng 300 mẫu IR khác nhau. Tính đến năm 1990 trên thế giới đã có khoảng chừng 300.000 IR được sử dụng mà nhiều nhất là ở Nhật, Hoa Kỳ và Đức. Giá bán của một IR hiện nay là 50.000 đến 250.000 USD.
Người máy công nghiệp và công nghệ cao cấp là những khái niệm của nền sản xuất hiện đại. Hiệu quả kinh tế do việc sử dụng người máy công nghiệp mang lại đã được khẳng định ở những nước công nghiệp phát triển, mà tại đó giá trị sức lao động khá cao, ví dụ năm 1990 chi phí sản xuất tính cho 1 giờ lao động là 20 USD và nếu dùng IR là 6 USD.
Hình 2.1: Ứng dụng robot trong sản xuất
1. Phân loại người máy công nghiệp:
Người máy công nghiệp được phân loại theo những cơ sở kỹ thuật khác nhau. Sau đây là một số cách phân loại người máy công nghiệp.
a. Phân loại người máy công nghiệp theo số bậc tự do:
Xuất phát từ hai hình thức chuyển động cơ bản trong không gian ba chiều X, Y, Z là chuyển động theo các trục X, Y, Z được ký hiệu là T (viết tắt theo thuật ngữ translation). Chuyển động quay quanh các trục X, Y, Z được kí hiệu là R (viết tắt theo thuật ngữ rotation) mà các người máy công nghiệp sẽ hoạt động, tuỳ theo các tổ hợp chuyển động T và R cơ bản trong trường hợp hoạt động tương ứng với các hình khối không gian khác nhau.
nhật.
− TTT ứng với trường hợp hoạt động là khối lập phương hoặc chữ
− RTT ứng với trường hợp hoạt động là khối viên trụ.
− RRT ứng với trường hợp hoạt động là khối cầu có hai đáy phẳng.
− RRR ứng với trường hợp hoạt động là khối cầu đều.
Như vậy số bậc tự do chuyển động ứng với các khớp quay và các đường
trượt thẳng. Tổng số các trục chuyển động theo hệ toạ độ đecac ở đây là sáu. Nói chung khi người máy công nghiệp càng tinh vi, càng khéo léo thì giá trị đầu tư cho nó càng cao.
b. Phân loại người máy công nghiệp theo phương pháp điều khiển:
Người máy công nghiệp được điều khiển theo hai nguyên lí cơ bản:
− Điều khiển điểm.
− Điều khiển quỹ đạo liên tục.
c. Phân loại người máy công nghiệp theo hệ thống năng lượng:
− Năng lượng thường sử dụng cho người máy công nghiệp là điện, thủy lực, khí nén. Điện năng dùng cho người máy công nghiệp thông qua các động cơ điện DC hoặc các động cơ bước. Hệ thống vận hành của người máy công nghiệp dùng dạng năng lượng này có ưu điểm là chính xác, tin cậy, tuyến tính, đạt công xuất khá, dễ điều khiển, kết cấu gọn, truyền dẫn đơn giản.
− Năng lượng thủy lực và khí nén có thể tạo ra công suất lớn, tuy vậy hệ thống vận hành dùng các dạng năng lượng này cồng kềnh và có tính chất phi tuyến nên khó xử lý khí, khi điều khiển, hệ thống khí nén có kết cấu gọn nhẹ hơn hệ thống thuỷ lực, nhưng có công suất nhỏ hơn, kém chính xác, chỉ phù hợp cho các loại người máy nhỏ gọn hoạt động theo chương trình đã định sẵn với các thao tác đơn giản “nhấc lên, đặt xuống”.
d. Phân loại người máy công nghiệp theo hệ thống truyền động: Hệ thống truyền động của người máy công nghiệp được phân thành hai loại là truyền động trực tiếp và truyền động gián tiếp.
− Hệ thống truyền động trực tiếp với các cơ cấu chấp hành được nối ghép trực tiếp với nguồn động lực nên kết cấu rất gọn nhẹ, không có nhược điểm của hệ thống truyền động gián tiếp. Các động cơ có số vòng quay thích hợp và điều khiển vô cấp trên một dải rộng được sử dụng cho hệ truyền động này. Các động cơ bước cần được nâng cao mức công suất để đáp ứng yêu cầu của các động cơ chấp hành.
− Hệ thống truyền động gián tiếp có sử dụng các kết cấu cơ khí thông thường như bánh răng, đai, xích, vít me-đai ốc. Nhược điểm của hệ này có tính chất phi tuyến, có tính trễ và bị mòn gây ra khe hở làm tăng hiệu ứng trễ và tính phi tuyến, có tổn thất về công suất, tốc độ làm việc giảm hiệu suất chung.
e. Phân loại người máy công nghiệp theo độ chính xác: Trong hoạt động của IR có hai khái niệm được phân biệt đó là độ chính xác tuyệt đối và độ chính xác lặp lại để đánh giá mức độ tin cậy của người máy trong một chu trình làm việc đơn lẻ và một quá trình làm việc lâu dài. Ngoài ra độ chính xác phân giải dùng để đánh giá độ chính xác trên một miền kích thước, hay một phạm vi chức năng rộng lớn.
2. Lập trình cho người máy công nghiệp:
Bản chất của lập trình cho người máy công nghiệp là lập chương trình CNC để điều khiển người máy công nghiệp hoạt động theo yêu cầu. Khi lập chương trình CNC cho người máy phải xác định các điểm định vị và định hướng dụng cụ (như định hướng mỏ hàn cắt khi hàn theo quỹ đạo cong phức tạp mà hầu như không thể xác định ngay được từ bản vẽ chi tiết).
Các phương pháp lập trình cho người máy CNC:
− Lập trình theo cách dạy.
− Lập trình theo cách để cho người máy bắt chước làm theo.
− Lập trình bên ngoài cách biệt.
a. Lập trình theo cách dạy: Theo cách này người máy được người lập trình dạy chuyển động tới vị trí làm việc, hệ điều khiển CNC sẽ ghi nhận toàn bộ các chuyển động sau đó điều khiển người máy hoạt động. Người vận hành dùng bảng điều khiển để dạy người máy chuyển động.
b. Lập trình theo cách bắt chước: Đối với cơ cấu chấp hành đơn giản, như người máy dùng để sơn vỏ xe hơi, chuyển động cần thiết được xác định trực tiếp bằng tay như sau: Người vận hành dùng tay mình cầm tay người máy và tập cho nó chuyển động theo quỹ đạo và hướng đã xác định, hệ điều khiển CNC sẽ nhớ trong phạm vi 20ms các giá trị định vị của các trục điều khiển. Khi tự hoạt động người máy sẽ lặp lại chương trình mà hệ điều khiển CNC của nó đã nhớ được.
c. Lập trình bên ngoài cách biệt:
− Theo cách này người ta lập trình CNC cho người máy ở văn phòng theo các từ lệnh của một ngôn ngữ lập trình riêng, trên cơ sở các chỉ dẫn chuyển động và chỉ dẫn điều khiển. Trong các văn phòng lập trình đủ tiện nghi, các chuyển động của người máy được mô phỏng trên màn hình máy vi tính và thể hiện bằng đồ hoạ.
− Khi lập trình CNC cho người máy phải tuân thủ các chỉ dẫn lập trình ứng với các chức năng khác nhau. Chuyển đọng, thực hiện chương trình, truy nhập dữ liệu, tính toán, nối ghép, xác nhận các chức năng tiếp nhận dữ liệu để thích nghi với quá trình gia công.
− Với các chỉ dẫn chuyển động, tiến hành lập trình dạng chuyển động giữa hai điểm lập trình trên cơ sở quỹ đạo tốc độ, chuyển động tăng tốc, giảm tốc, hiệu chỉnh điểm chuẩn, hiệu chỉnh chiều dài và bán kính dụng cụ.
− Với các chỉ dẫn thực hiện chương trình, quá trình hoạt động của người máy được điều khiển theo dữ liệu môi trường hoạt động: ví dụ các chỉ dẫn bước nhảy có điều kiện sẽ tạo ra bước nhảy trong chương trình tuỳ thuộc các tính hiệu đầu vào. Bên cạnh đó còn có các chỉ dẫn dừng lại đối với quá trình chuyển động cho tới khi có lệnh khởi động trở lại và các chỉ dẫn cắt đứt đoạn chương trình đang thực hiện.
− Các chỉ dẫn nhập và xuất tạo điều kiện xuất tín hiệu khi đã thực hiện các đoạn chương trình xác định. Ví dụ khởi động cho động cơ băng tải để cung cấp phôi hoặc yêu cầu về tín hiệu đầu vào, ví dụ một phần tử nhạy nhị phân báo cho biết là một phôi có tồn tại hay không tại một vị trí xác định .
− Các chỉ dẫn đặc biệt về xuất là những chỉ dẫn để vận hành cơ cấu cầm nắm và bộ ghi nhận. Với bộ ghi nhận các người máy có thể lưu tâm đến các quá trình có liên quan khi thực hiện chuyển động tiếp theo. Ngoài tín hiệu nhị phân, ở hệ điều khiển hiện đại có thể ghi nhận tín hiệu số xuất ra, ví dụ: để nghiêng bàn gá phôi với góc nhất định. Tín hiệu tương tự cũng được sử dụng, ví dụ để điều khiển tự động hàn, điều chỉnh mỏ hàn.
− Các chỉ dẫn tính toán và nối ghép là để liên kết các tín hiệu nhập và xuất. Ngoài ra còn có thể xây dựng, ví dụ các chương trình để diễn tả các mẫu chuyển động với các chỉ dẫn số học. Khi các phôi được sắp sếp thứ tự trên một phiến gá chuẩn thì vị trí của các phôi khác được tính theo vị trí của phôi thứ nhất bằng phép cộng liên tiếp kích thước dài, rộng và cao của phôi.
− Các chỉ dẫn logic để liên kết các đầu vào và các đầu ra nhị phân. Ví dụ liên kết “và” cho việc xuất một tín hiệu đầu ra nếu có vài tín hiệu đầu vào thoả điều kiện này.
− Với các chỉ dẫn đặt biệt có thể để người máy điều hoà theo tốc độ của một băng chuyền. Các chỉ dẫn về phần tử nhạy tạo khả năng thích nghi chuyển động trên cơ sở các tín hiệu ghi nhận được, ví dụ tự động né tránh khi sát gần phôi hoặc chi tiết.
− Lập trình cho người máy khác với lập trình CNC thông thường ở chỗ việc lập trình cho người máy không có cốt mã lệnh và cấu trúc mã lệnh tiêu chuẩn, vì ở khâu lập trình cho người máy chủ yếu theo module dạy, nghĩa là thông qua các phím chức năng, không bắt buộc phải có cốt mã thống nhất. Như vậy chương trình người máy trong thực tế công nghiệp được thể hiện rất khác nhau tuỳ theo hệ điều khiển khác nhau do các hãng chế tạo sử dụng.
3. Những ứng dụng điển hình của Robot:
a. Ứng dụng trong công nghiệp:
− Robot được ứng dụng rộng rãi trong nhiều ngành công nghiệp. Những ứng dụng ban đầu bao gồm gắp đặt vật liệu, hàn điểm và phun sơn.
− Một trong những công việc kém năng suất nhất của con người là rèn kim loại ở nhiệt độ cao. Các công việc này đòi hỏi công nhân di chuyển phôi có khối lượng lớn với nhiệt độ cao khắp nơi trong xưởng. Việc tuyển dụng công nhân làm việc trong môi trường nhiệt độ cao là một vấn đề khó khăn đối với ngành công nghiệp này, và robot ban đầu đã được sử dụng để thay thế công nhân làm việc trong điều kiện môi trường ngặt nghèo như trong lò đúc, xưởng rèn, xưởng hàn. Trong các nhà máy sản xuất xe hơi thì hàn điểm là công việc sử dụng robot nhiều nhất: khung xe được cố định vào một xe được điều khiển từ xa di chuyển khắp nhà máy. Khi xe đến trạm hàn, kẹp sẽ cố định các chi tiết đúng vào vị trí cần hàn, trong khi đó robot di chuyển dọc theo các điểm hàn được lập trình trư
Hình 2.2: Hàn khung xe bằng robot
− Sơn là một công việc nặng nhọc, độc hại đối với sức khoẻ của con người, nhưng lại hoàn toàn không nguy hiểm đối với robot. Ngoài ra, con người phải mất hơn hai năm để nắm được kỹ thuật và kỹ năng trở thành một thợ sơn lành nghề trong khi đó robot có thể học được tất cả kiến thức đó chỉ trong vài giờ và có thể lặp lại một cách chính xác các động tác sơn phức tạp. Điều đó thể hiện một bước tiến đáng kể trong việc kết hợp giữa năng suất và chất lượng cũng như
cải thiện chế độ làm việc cho con người trong môi trường độc hại. Tất cả robot phun sơn đều được “dạy” bởi một thợ sơn chuyên nghiệp giữ đầu phun và dịch chuyển nó đi đúng đường (đường đi đó được ghi lại) và khi robot thực hiện công việc phun sơn thì nó chỉ việc đi theo đường đi đã được định sẵn đó. Như thế, robot phun sơn phải có các khớp sao cho người thợ sơn có thể dể dàng dẫn hướng cho chúng. Ứng dụng này đưa đến sự phát triển một loại tay robot loại “vòi voi” có độ linh hoạt cao.
Robot còn được sử dụng trong nhiều lĩnh vực khác nữa như phục vụ cho máy công cụ, làm khuôn trong công việc đồ nhựa, gắn kính xe hơi, gắp hàng ra khỏi băng tải và đặt chúng vào các trạm chuyển trung gian.Hình 2.3: Sơn xe hơi bằng robot
Hình 2.4: Gia công khuôn vỏ xe bằng robot
b. Ứng dụng robot trong công nghệ hàn đường:
− Hàn đường thường được thực hiện bằng tay. Tuy nhiên, năng suất thấp do yêu cầu chất lượng bề mặt mối hàn liên quan đến các thao tác của đầu mỏ hàn với môi trường khắc nghiệt do khối và nhiệt độ phát ra trong quá trình hàn.
− Không giống kỹ thuật hàn điểm, ở đó mối hàn có vị trí cố định, mối hàn trong kỹ thuật hàn đường nằm dọc theo mối ghép giữa hai tấm kim loại. Những hệ thống hàn đường thực tế phụ thuộc vào con người trong việc kẹp chặt chính xác chi tiết được hàn, và sau đó robot di chuyển dọc theo quỹ đạo được lập trình trước. Ưu điểm duy nhất so với hàn bằng tay là chất lượng mối hàn được ổn định. Người vận hành chỉ còn thực hiện một việc tẻ nhạt là kẹp chặt các chi tiết. Có thể thực hiện tăng năng suất bằng cách trang bị bàn định vị quay nhờ đó người vận hành có thể kẹp chặt một chi tiết trong khi thực hiện việc hàn một chi tiết khác. Tuy nhiên, luôn có vấn đề khó khăn trong việc lắp khít chi tiết do dung sai trong chế tạo, chi tiết bị cong vênh, và các thiết kế cần lắp ghép theo đường cong không đồng dạng. Các vấn đề đó làm cho việc kẹp chặt chi tiết khó khăn, đặt biệt là đối với các chi tiết lớn và lắp tấm kim loại mỏng. Hơn nữa, đường hàn có thể không xử lý được với mỏ hàn vì nó bị che khuất bởi chi tiết khác. Thợ hàn tay phải xử lý khó khăn nhiều loại mối nối và vị trí các chi tiết khác nhau. Gần đây các nghiên cứu tập trung vào phương pháp dò vết đường hàn với mục đích giảm bớt yêu cầu định vị chính xác, và do đó giảm chi phí hàn trong khi chất lượng mối hàn lại tăng.
− Cảm biến trang bị trên các robot hàn đường phải có khả năng xác định vị trí của đường hàn. Như vậy, để mối hàn được đặt chính xác, đúng yêu cầu về hình dáng và kích thước thì robot phải giữ điện cực theo hướng đúng của đường hàn với khoảng cách đúng từ đường hàn đến đầu mỏ hàn và di chuyển với tốc độ không đổi sao cho lượng vật liệu chảy vào mối nối không đổi. Xác định đường hàn cho các vật thể ba chiều thì phức tạp hơn cho các tấm phẳng vì thường cần phải mô hình hoá hình học để định ra đường di chuyển của robot.
Hình 2.5: Hàn điện bằng robot
c. Ứng dụng robot trong lắp ráp:
− Một kỹ thuật sản xuất có mục tiêu lâu dài là nhà máy tự động hoàn toàn, ở đó một bản thiết kế được thể hiện tại một trạm thiết kế bằng máy tính, không có sự can thiệp của con người vào quá trình sản xuất. Hãy thử hình dung một môi trường sản xuất tự động hoàn toàn từ ý tưởng sản phẩm, gồm các chỉ tiêu kỹ thuật, người ta thiết kế ra sản phẩm, sau đó đặt hàng vật liệu, lập ra chương trình gia công, lập ra chiến lược đường đi của chi tiết trong nhà máy, điều khiển cung cấp chi tiết vào máy gia công, lắp ráp và kiểm tra tự động thông qua các máy gia công CNC và các robot tĩnh và robot di động.
− Những thành tựu của môi trường sản xuất như thế đã và đang được đầu tư nghiên cứu và phát triển trong nhiều năm qua. Hiện nay các nhà máy lớn hiện đại đã áp dụng mô hình tự động hoá hoàn toàn, đặc biệt là phần thiết kế ở cấp cao và phần xử lý chi tiết ở cấp thấp. Một trong những trở ngại chính là liên kết các tầng với nhau. Một khó khăn khác là nhu cầu phương pháp xuất ra các đặc tả thủ tục từ mô hình máy tính của sản phẩm. Ví dụ, việc lập ra một cách tự động trình tự lắp ráp các chi tiết với nhau trong khâu lắp ráp.
Hình 2.6: Lắp ráp đồ chơi bằng robot tự động
− Robot được sử dụng để tự động hoá quá trình lắp ráp trong những nhà máy như thế. Khâu này tập trung nhiều lao động và khó hơn nhiều so với dự tính. Ví dụ: cầm một cái mỏ hàn tay đơn giản và tháo nó ra từng phần. Có bao nhiêu chi tiết? Có bao nhiêu cách lắp ráp nó? Bạn có thể lắp ráp nó bằng một tay hay không? Bây giờ bạn đang gặp phải sự giới hạn của robot. Sự phát triển cảm biến và ứng dụng nó vào robot, là yếu tố quan trọng cơ bản để ứng dụng robot trong lắp ráp. Lấy ví dụ, đầu mỏ hàn là một vật thể nhỏ, nên để lắp ráp nó chúng ta cần tập trung mọi chi tiết lại, tìm vị trí và hướng lắp ráp từng chi tiết, lấy chi tiết đầu tiên và đặc nó vào cơ cấu kẹp chặt, lấy một chi tiết nữa và theo đúng thứ tự và lắp ráp vào chi tiết đầu tiên.
− Việc lắp ráp còn liên quan đến nhiều xử lý khác nhau: Đưa một chi tiết vào một chi tiết kia, đặt một chi tiết trên một chi tiết khác, siết chặt đai ốc, siết chặt vít, hay phun keo… Tuy nhiên tuỳ truờng hợp cụ thể để quyết định sử dụng robot trong việc lắp ráp hay không. Trong thực tế khi sản phẩm được thiết kế khéo léo thì người công nhân có thể lắp ráp sản phẩm đó trong một thời gian ngắn.
d. Ứng dụng robot trong nhà máy sản xuất:
− Trong sản suất lớn những robot này là những hệ thống được tự động hoá hoàn toàn, chúng đo đạc, cắt khoan các thiết bị chính xác và còn có khả năng hiệu chỉnh các công việc của mình, hầu như ở đây không cần sự trợ giúp của con người trừ chương trình điều khiển trong máy tính, chỉ với vài người giám sát công việc của máy móc này là có thể hoạt động suốt ngày đêm. Các robot làm tất cả các công việc như vận chuyển sản phẩm từ công đoạn sản xuất này đến công đoạn sản xuất khác kể cả việc sếp và đưa thành phẩm vào kho.
− Các nhà máy lớn thường sản xuất một số mặt hàng nhất định trên các dây chuyền hiện đại, các nhà máy cở vừa và nhỏ, như nhà máy sản suất phụ tùng chẳng hạn, thì thường sản xuất sản phẩm đa dạng với số lượng không lớn. Robot không phải lúc nào cũng thích hợp với nhũng công việc như vậy, nhưng nhà máy loại này cũng có thể giải quyết vấn đề đó bằng cách trang bị nhiều
thiết bị đa dạng cho tay gắp của robot nhằm cho phép robot có khả năng điều chỉnh nhanh chóng thiết bị công nghệ đáp ứng linh hoạt với nhiều dạng công việc khác nhau.
e. Ứng dụng robot trong nông nghiệp:
− Đối với nhiều người ý tưởng về một robot gieo hạt hay vun trồng là chuyện khoa học viễn tưởng, thế nhưng sự nghiêm túc tập trung vào các ứng dụng của robot trong nông nghiệp và đã đang được tiến hành. Một trong số các dự án thành công nhất cho đến nay là sự phát triển của robot cắt lông cừu ở ÚC. Đường cắt của kéo được robot điều khiển trên thân con cừu được tính bằng cách dùng một cừu mô hình. Để bù trừ cho các kích thước thay đổi của cừu thật và cừu mô hình, và sự thay đổi kích thước khi nó thở, người ta sử dụng một cảm biến gắn ở đầu kéo theo thời gian thực khi cắt lớp lông. Trong một cuộc thí nghiệm, trong số trên 200 con cừu được cắt lông từ phương pháp này thì số cừu bị thương ít hơn so với phương pháp cắt lông bằng tay.
Hình 2.8: Cắt lông cừu bằng robot.
f. Ứng dụng robot trong phòng thí nghiệm:
− Robot ngày càng được sử dụng nhiều trong các phòng thí nghiệm. Chúng được sử dụng để thực hiện tự động những công việc thủ công. Robot thực hiện rất tốt các thao tác lặp đi lặp lại, như đặt các chi tiết thí nghiệm vào các dụng cụ đo, giải phóng các kỹ thuật viên khỏi các công việc nhàm chán.
− Các nhà máy chế tạo các hệ thống này cho rằng chúng có ba ưu điểm so với thực hiện bằng tay: Tăng năng suất, tăng chất lượng thí nhgiệm và giảm sơ suất của con người làm hư hỏng hoá chất. Các ứng dụng thực tế đo độ PH, độ Nhớt và độ cứng trong đa phân tử, chuẩn bị mẩu xét nghiệm, nung nóng rót, cân và hoà tan mẩu cho phân tích quang phổ. Một số phòng thí nghiệm nhận thấy rằng các mẩu thí nghiệm trong phòng thí nghiệm, nghiên cứu dễ thích ứng hơn với các sản phẩm không thay đổi nếu robot được sử dụng đểvận chuyển vật liệu giữa các giai đoạn sử lý. Vì thế việc sử dụng các robot giúp nhanh chóng chuyển nghiên cứu trong phòng thí nghiệm vào sản suất thực tế.
− Kỹ thuật robot được ứng dụng đầu tiên trong công nghiệp hạt nhân với sự phát triển của điều khiển qua màn hình để xử lý vật liệu phóng xạ. Gần đây hơn robot được sử dụng để hàn từ xa và kiểm tra đường ống trong vùng bị nhiễm xạ. Tai nạn nhà máy điện hạt nhân ThreeMile IsLand ở Pennsylvania năm 1979 thúc đẩy sự phát triển và ứng dụng của robot vào công nghiệp hạt nhân. Lò phản ứng số 2(TMI-2) mất chất làm nguội, làm cho lò phản ứng chính bị hư hại nặng đặt một vùng rộng lớn trong tình trạng không can thiệp được bởi con người. Do sự phát xạ nặng, các công việc chỉ được thực hiện được qua các robot điều khiển từ xa. Một ứng dụng phổ biến nửa là dùng robot để bốc dỡ hàng hoá, vật liệu phôi có trọng lượng lớn cồng kềnh trong các ngành công nghiệp nặng. Robot loại này có thể nâng tải trọng lên đến tối đa một tấn một cách dễ dàng với độ chính xác vị trí nhỏ hơn 1mm.
g. Ứng dụng của robot trong giáo dục:
− Robot được sử dụng trong phòng học dưới ba dạng riêng biệt: thứ nhất các chương trình giáo dục sử dụng robot làm phương tiện giảng dạy. Ngôn ngữ lập trình Kareltherobot, một dạng của ngôn ngữ Pascal, được giới thiệu về ngôn ngữ lập trình. Ngôn ngữ Krel có các cấu trúc điều khiển và ngữ pháp của Pascal, nhưng các biến được thay thế bằng robot các đối tượng cho robot thao tác, và một môi trường dạng ô. Sinh viên viết chương trình định nghĩa môi trường (vị trí thường và vị trí của các beeper) và điều khiển robot dò tìm trong môi trường và nhặt các peeper. Robot Odyssey là một trò chơi phiêu lưu để giảng dạy thiết kế logic. Người chơi phải thoát khỏi các robotropolis gọi là các robot thù địch, với sự hổ trợ của ba robot thân thiện. Bất cứ lúc nào người chơi cũng có thể hiệu chỉnh hoạt động của robot bằng cách thay đổi thiết kế mạch
logic. Mức độ nguy hiểm cần tránh ngày càng tăng theo diễn tiến của trò chơi, cần các thiết kế logic phức tạp hơn.
− Thứ hai robot rùa Tasman được sử dụng kết hợp với ngôn ngữ logo để giảng dạy về sự nhận thức máy tính. Robot rùa là một đối tượng biết suy nghĩ và có thể vẽ mẫu hình học. Ngôn ngữ này cũng có thể sử dụng để tạo một môi trường tự nhiên cho trẻ con bước đầu đi vào lĩnh vực lập trình.
h. Ứng dụng robot trong hỗ trợ người tàn tật:
− Theo nhà nghiên cứu Miguel Nicolelis thuộc truờng đại học Duke miền nam Carolina thì đối với những người bị bại liệt do chấn thương thần kinh cột sống hay bị mắc những chứng bệnh ở hệ thống trung khu thần kinh thì các kết quả nghiên cứu trên cho phép bệnh nhân bất chấp sự tổn thương thần kinh có thể gửi các xung điện trực tiếp đến các cơ bắp của họ. Ông cũng nói rằng vào tương lai không xa các tế bào thần kinh bị tổn thương có thể thay thế bằng các vi mạch silicon.
− Ngoài ra các nhà nghiên cứu ở trường đại học Duke đang cố gắng thực hiện một vi mạch có thể cấy dưới da, thay thế cho máy vi tính đặt bên ngoài. Bác sĩ Roy Bakay thuộc bệnh viện Rush Presbyterian ở Chicago (Mỹ), người đã phối hợp phát triển một hệ thống cho phép người bại liệt điều khiển con trỏ trên màn hình vi tính với vi mạch được ghép, nói rằng các bộ phận hay thiết bị cho phép con người thực hiện các hoạt động thường ngày có thể phát triển khá nhanh chóng, nhưng các bộ phận tay chân giả để thực hiện các hoạt động phức tạp hơn như ném một quả bóng thì phải mất một thời gian khá lâu để nghiên cứu hoàn chỉnh.
− Các bộ phận giả hiện nay cho những người bị mất tay chân có thể đọc được các xung điện từ các cơ bắp còn lại và kích hoạt các cánh tay, bàn tay và chân giả bằng cơ khí, nhưng các bộ phận đó vẫn chưa phát triển hoàn chỉnh cho những người bị bại liệt hoàn toàn từ cổ trở xuống. Tuy nhiên, những nhà nghiên cứu ở Bỉ đang thí nghiệm một hệ thống cho phép một người bị bại liệt từ eo trở xuống có thể đi được, bằng cách dùng những điện cực gắn vào các cơ chân. Các điện cực đó được nối với một vi mạch có thể giả các tín hiệu được gửi từ não bộ.
Hình 2.9: Robot phẫu thuật dùng trong y học
i. Ứng dụng robot trong sinh hoạt:
− Một loại robot mà trẻ em có thể chơi với chúng, loại robot này chạy được khi ta vỗ tay. Một loại robot khác thì chuyển các cử động của tay người thành các xung điện rồi qua đó điều khiển tay nhân tạo. Các robot này có một tập lệnh được cài sẵn trong bộ nhớ, và nó có thể nhấc và mang các đồ vật theo lệnh từ bộ điều khiển trung tâm. Một số loại robot khác nữa với các bộ cảm biến nhận biết giọng nói người, đo nhiệt độ cơ thể và thực hiện nhiều công việc phức tạp khác nhau, các robot này không chỉ là những đồ chơi hấp dẫn cho trẻ em mà còn là các mô hình của các thiết bị thực tiễn phục vụ trong sinh hoạt hằng ngày.
− Một thế hệ robot mới ra đời ở Nhật bản được gọi là kỹ thuật i- Waik. Những robot này thông minh hơn nhiều những robot thuộc thế hệ trước đó đã được sử dụng trong các nhà máy. Thế hệ robot thông minh này được thiết kế để sử dụng trong nhà và trong văn phòng, vì vậy Nhật Bản đã trở thành một cường quốc về robot. Robot mới nhất của Honda Motor có thể đi bằng hai chân, vẫy tay, bật công tắc, khiêu vũ, nướng bánh và giúp tắm cho người lớn tuổi. Sản phẩm robot này tiêu biểu cho một bước tiến lớn trong lĩnh vực robot, vì nó cho phép các nhà kỹ thuật có thể tạo ra những di chuyển nhẹ nhàng, giống như người. Các nhà khoa học của hãng Honda cho biết trong tương lai các robot thế hệ sau sẽ đảm nhiệm được các công việc thường ngày như đẩy xe tới lui trong siêu thị, tăng giảm nhiệt độ trong phòng.
− Trong lĩnh vực giải trí, hãng Sony vừa cho ra đời một loại robot đáp ứng nhu cầu giải trí ngày càng cao cho các khách hàng cao cấp; đó là chó Robotoc5.
.........................................................................
![]() CHƯƠNG 3
CHƯƠNG 3
VI ĐIỀU KHIỂN P89V51 CỦA PHILIPS
I. Giới thiệu tổng quát:
P89V51 của Philips là một vi điều khiển với nhân 80C51. Phụ thuộc vào dung lượng bộ nhớ chương trình Flash, P89V51 có ba loại:
P89V51RB2 với 16KB Flash P89V51RC2 với 32KB Flash P89V51RD2 với 64KB Flash
Một chức năng khác biệt so với họ MCS-51 của Intel là P89V51 có tuỳ chọn chế độ X2. Người sử dụng có thể tuỳ chọn chạy các ứng dụng với 12 clocks mỗi chu kỳ máy hoặc chọn chế độ X2 với 6 clocks mỗi chu kỳ máy. Ngoài ra P89V51 còn hỗ trợ chế độ IAP (In-Application Programmable) cho phép nạp chương trình trong khi đang chạy các ứng dụng khác. Đây là điểm khác biệt lớn nhất so với vi điều khiển cùng loại của Intel.
Hình sau đây mô tả sơ đồ chân của P89V51:

(a)
 (b)
(b)

(c)
Hình 3.1: (a) Sơ đồ chân P89V51 dạng PLCC 44. (b) Sơ đồ chân P89V51 dạng TQFP 44. (c) Sơ đồ chân P89V51 dạng DIP 40.
II. Các chức năng của P89V51:
− Hoạt động ở điện áp 5V với tần số từ 0 MHz đến 40 MHz.
− 16/32/64 KB ROM.
− 1Kbyte RAM.
− 4 port xuất nhập 8 bits.
− 3 bộ đếm – định thời 16 bits.
− Cho phép lập trình với bộ định thời Watchdog.
− 8 nguồn ngắt với bốn cấp độ ưu tiên.
− Thanh ghi con trỏ dữ liệu DPTR thứ hai.
− Tương thích logic giữa TTL và CMOS.
− Các chế độ nguồn thấp như: chế độ nguồn giảm khi ngắt bắt đầu và chế độ nghỉ.
− Giao tiếp ngoại vi nối tiếp và UART tăng cường. Với các chức năng trên, P89V51 của Philips ưu việt hơn hẳn so với họ MCS-51 của Intel ở chỗ tầm tần số hoạt động rất lớn, dung lượng ROM tối thiểu gấp 4 lần MCS-51, dung lượng RAM gấp 8 lần với 1Kbyte, dòng ra trên port 1 rất lớn khoảng 16mA. Ngoài ra P89V51 còn có thêm thanh ghi DPTR thứ hai rất thuận tiện cho người sử dụng.
III. Sơ đồ khối của chip P89V51:

Hình 3.2: Sơ đồ khối của vi điều khiển P89V51
IV. Mô tả các chức năng cơ bản:
1. Tổ chức bộ nhớ:
Bộ nhớ của P89V51 được tách làm hai phần:
− Phần thứ nhất là bộ nhớ địa chỉ cho chương trình.
− Phần thứ hai là bộ nhớ dữ liệu.
Sự phân tách này khiến hoạt động của P89V51 có vẻ giống với CPU với không gian nhớ dữ liệu và chương trình đều lưu trú chung trong RAM.
Lựa chọn Bank cho bộ nhớ chương trình:
|

Bảng3.1: Vùng địa chỉ ROM
Truy xuất đến IAP trong khối 1 có thể cho phép băng cách xoá bit BSEL (FCF.0) sau đó cấp bit SWR đã được xoá. Người dùng cần phải xoá bit SWR để truy xuất IAP trong khối 1. Tuy nhiên, không được xoá bit BSEL khi thực hiện mã cho người sử dụng trong vùng đỉa chỉ từ 0000H đến 1FFFH.
2. Hoạt động Reset :
a. Reset khi bật nguồn: Khi bật nguồn, các chân port ở trạng thái ngẫu nhiên. Chân RST phải được giữ ở mức cao đủ cho bộ dao động khởi động trong khoảng 2 chu kỳ máy. Hoạt động Reset sẽ không ảnh hưởng đến 1KB RAM trên chip khi thiết bị đang chạy. Khi Reset, khối 0 sẽ bắt đầu tại 0000h.
b. Reset bằng phần mềm: Phần mềm Reset sẽ thực hiện bằng cách thay đổi bit SWR từ 0 lên 1. Một phần mềm Reset sẽ Reset bộ đếm chương trình về 0000H và buộc cả hai bit (FCF[1:0])=10. Tuy nhiên, giống như MCS-51, dữ liệu của RAM không thay đổi. Ngoài ra, P89V51 còn có khả năng tự Reset khi nhận biết có sự sụt áp do quá tải, khi điện áp rơi xuống thấp hơn ngưỡng 2.35V, chip sẽ tự Reset. Và hoạt động Reset Watchdog.
3. Bộ nhớ dữ liệu RAM: Trên chip có 1KB RAM và giống như MCS-51, nó có thể mở rộng lên 64K bộ nhớ ngoài.
Cấu trúc bộ nhớ của RAM gồm:
− 128 bytes thấp dành chung cho địa chỉ trực tiếp và gián tiếp từ 00H
đến 7FH
− 128 bytes cao chỉ dành cho địa gián tiếp từ 80H đến 0FFH
− Các thanh ghi chức năng đặc biệt được định địa chỉ
− 768 bytes RAM bổ sung từ 00H đến 2FFH cho địa chỉ gián tiếpSơ
Sơ đồ bộ nhớ dữ liệu RAM:

Hình 3. 3: Sơ đồ bộ nhớ RAM
|

Hình 3. 4: Sơ đồ tổ chức con trỏ dữ liệu kép
5. Timers/Counters 0 và 1: Giống như MCS-51, đây là hai thanh ghi 16 bits dùng để định thời hoặc đếm sự kiện. Việc cấu hình cho Timer/Counter hoạt động cũng giống như đối với 89C51.
Trong chức năng định thời, giá trị thanh ghi tăng lên 1 sau mỗi chu kỳ máy và tốc độ đếm bằng 1/6 tần số dao động.
Trong chức năng đếm, giá trị thanh ghi tăng lên khi có sự chuyển mức từ 1 xuống 0 tại chân ngõ vào bên ngoài. Ngõ vào này được lấy mẫu một lần ở mỗi chu kỳ máy.
Chức năng đếm hoặc định thời được chọn bởi thanh ghi TMOD và TCON. Cũng giống như MCS-51, Timers/ Counters của P89V51 có 4 chế độ hoạt động được thiết lập bởi hai bit M1 và M0 và chức năng hoạt động ở các chế độ của hai con vi điều khiển này là giống nhau.
6. Timer 2:
Timer 2 là thanh ghi đếm/ định thời 16 bit có thể hoạt động như là một bộ định thời hoặc đếm sự kiện. Được lựa chọn bởi C/T2 trong thanh ghi chức năng đặc biệt T2CON. Timer 2 có bốn chế độ hoạt động: chế độ 16 bit, 16 bit tự nạp lại, đếm sự kiện bên ngoài và bộ tạo tốc độ baud được lựa chọn tuỳ thuộc vào việc sử dụng T2CON và T2MOD.
Thanh ghi điều khiển Timer/ Counter 2(T2CON):
Hình 3. 5: Thanh ghi điều khiển Timer/ Counter 2(T2CON)
Bit Ký hiệu Mô tả
7 TF2 Cờ tràn Timer 2.
6 EXF2 Cờ ngoài Timer 2.
5 RCLK Cờ thu dùng trong UART chế độ 1 và 3.
4 TCLK Cờ phát dùng trong UART chế độ 1 và 3.
3 EXEN2 Cờ cho phép ngoài Timer 2.
2 TR2 Bit điều khiển Timer 2 dừng/ hoạt động.
1 C/T2 Bit lựa chọn đếm/ định thời.
Hình 3. 6: Thanh ghi điều khiển chế độ định thời(T2MOD)
|
Bit |
Ký hiệu |
Mô tả |
|
7 đến 2 |
|
Bit dự trữ, luôn bằng 0. |
|
1 |
T2OE |
Bit cho phép ngõ ra định thời 2. |
|
0 |
DCEN |
Bit cho phép đếm xuống. |
a. Chế độ 16 bit: Trong chế độ này có hai lựa chọn được chọn bằng bit EXEN2 trong T2CON. Nếu EXEN2 =0, Timer là bộ đếm/định thời 16 bit (bằng cách chọn C/T2 trong T2CON) mà khi Timer/Counter tràn sẽ set bit TF2. Bit này có thể dùng để sinh ra ngắt. Nếu EXEN2 = 1, hoạt động của Timer 2 như mô tả ở trên nhưng có thêm chức năng là khi có sự chuyển mức từ 1 xuống 0 tại ngõ vào bên ngoài T2EX, được gây ra bởi giá trị trực tiếp trong thanh ghi Timer
2, TL2 và TH2, được nạp vào thanh ghi RCAP2L và RCAP2H. Chế độ này cũng tương tự như hoạt động chế độ 1 trong 8051.
b. Chế độ nạp lại 16 bit: Trong chế độ này, Timer 2 có thể được cấu hình như bộ đếm hoặc định thời, việc đếm được điều khiển bởi bit DCEN trong thanh ghi T2MOD. Khi DCEN=0, Timer 2 được mặc định là đếm lên. Nếu DCEN =1, Timer 2 sẽ đếm lên hoặc xuống tuỳ thuộc vào giá trị chân T2EX.
c. Lập trình clock-out: Một xung có chu kỳ bổn phận 50% có thể được lập trình để đưa đến chân P1.0. Chân này bên cạnh là chân I/O, nó còn có thêm hai chức năng khác:
− Là ngõ vào của nguồn xung bên ngoài cho Timer/ Counter 2.
− Là ngõ ra xung vuông 50% có tần số từ 122Hz đến 8MHz tại tần số thạch anh 16MHz.
Để thiết lập Timer /Counter 2 như là bộ tạo xung, bit C/T2 trong T2CON
phải bằng 0 và bit T20E trong TMOD phải bằng 1. Bit TR2 cũng phải bằng 1.
Tần số clock-out phụ thuộc vào tần số dao động và giá trị nạp lại trong
RCAP2H và RCAP2L.
d. Chế độ tạo tốc độ Baud:
Các bit TCLK và RCLK cho phép thu và nhận tốc độ baud từ Timer 1 hoặc Timer 2. Khi TCLK =0, Timer được sử dụng như là bộ truyền UART tốc độ baud và Timer 2 được sử dụng khi TCLK =1. RCLK cũng tương tự cho hoạt động thu UART tốc độ baud.
Thông thừơng, ta sử dụng chế độ nạp lại để tạo tốc độ baud. Tốc độ baud trong chế độ 1 và 3 được quyết định bởi tốc độ tràn của Timer 2 chia 16. Timer 2 hoạt động trong chế độ tạo tốc độ baud khi RCLK và hoặc TCLK =1 trong thanh ghi T2CON, và khi Timer hoạt động trong chế độ này thì ngắt do Timer 2 sẽ bị cấm. Khi Timer 2 hoạt động trong chế độ tạo tốc độ baud, nếu nó nhận được xung clock trên chân T2 (P1.0) thì tốc độ baud được tính như sau:
Tốc độ baud = tốc độ tràn của Timer 2 chia 16.
Nếu Timer 2 nhận được dao động bên trong thì tốc độ baud sẽ là: Baud rate =fOSC / (16 * (65536 – (RCAP2H,RCAP2L).
Bảng dưới đây cung cấp một số tốc độ baud thường dùng cũng như giá trị
nạp cho RCAP2H và RCAP2L.
.........................................................
I. Ưng dụng:
CHƯƠNG KẾT LUẬN
Đề tài về tay máy là một đề tài khá mới đối với sinh viên ở nước ta. Nhưng khả năng ứng dụng của nó thì được biết đến rất sớm ở các nước phương Tây trong ngành công nghiệp, ngành chế biến thực phẩm, y học …
Đối với tay máy điều khiển 4 bậc tự do (toàn khớp bản lề) mà nhóm thực hiện, nó có thể gắp phôi, hoạt động trong phạm vi bán kính hình cầu, đặc biệt tay máy này có thể hoạt động theo tiếng nhạc.
II. Thuận lợi- khó khăn:
1. Thuận lợi:
Từ nhiệm vụ, mục tiêu đã đề ra, công việc của nhóm đến nay đã đạt được những kết quả sau:
− Thiết kế được board điều khiển cho tay máy.
− Sử dụng được thêm vi điều khiển P89V51 của Philips.
− Lập trình giao tiếp và điều khiển được tay máy.
− Sử dụng và hiển thị được LCD trên tay máy.
− Giao tiếp tay máy với keyboard và máy tính.
− Tay máy có thể cử động nhịp nhàng theo nhạc.
2. Khó khăn:
Phía sau những kết quả đạt được, nhóm đã gặp phải một vài khó khăn trong công việc:
− Nhóm phải tìm hiểu tài liệu tham khảo phần lớn bằng tiếng Anh.
− Bước đầu còn bỡ ngỡ trong việc tìm hiểu và sử dụng họ vi điều khiển mới.
− Nhóm gặp nhiều trở ngại trong phương pháp lập trình.
III. Ưu – khuyết điểm:
1. Ưu điểm:
− Tay máy có thể hoạt động tự do trong khoảng không gian bán kính cầu.
− Board điều khiển tay máy có thể sử dụng được hai loại vi điều
khiển là P89V51 của Philips và AVR của Atmel.
− Tay máy được lập trình giao tiếp với nhiều thiết bị.
2. Khuyết điểm:
− Do công suất của động cơ Servo còn yếu, chưa đáp ứng được khối lượng của tay máy nên khi vận hành còn rung.
− Cơ cấu tay gắp chưa tối ưu.
− Không gian làm việc chưa tận dụng hết.
− Kích thước tay máy còn nhỏ.
IV. Nhận xét:
Nhìn chung, từ nhiệm vụ, mục tiêu đề ra đến kết quả công việc, nhóm đã rèn luyện được thêm nhiều khả năng về thiết kế, lập trình và hiểu biết thêm về họ vi điều khiển mới.
Tuy nhiên, do điều kiện về thời gian, vật chất nên đề tài của nhóm chỉ đạt được một số thành quả nhất định. Đề tài này nếu được sử dụng ở mức độ giảng dạy thì sẽ phù hợp nhất.
V. Hướng phát triển của đề tài:
Như đã trình bày ở trên, đề tài còn nhiều hạn chế. Để khắc phục và phát triển thêm cho đề tài thì trước hết phải nâng cấp công suất của động cơ, tăng kích thước tay máy cho phù hợp. Phần còn lại là tối ưu chương trình điều
khiển.
Nếu khắc phục được các nhược điểm trên thì tay máy có thể được ứng dụng hiệu quả hơn vào các công việc khác.









