LUẬN VĂN Nghiên cứu Thiết kế, chế tạo thiết bị phát mặt phẳng laser ứng dụng trong hệ thống san phẳng

NỘI DUNG ĐỒ ÁN
LUẬN VĂN Thiết kế, chế tạo thiết bị phát mặt phẳng laser ứng dụng trong hệ thống san phẳng
Design and fabrication of a laser-surface transmitter
applying for the laser-controlled land leveling system
Tóm tắt
Thiết bị phát mặt phẳng laser là thành phần quan trọng trong cụm thiết bị san phẳng mặt đất ruộng, vườn. Trong quá trình hoạt động thiết bị luôn giữ cho mặt phẳng laser được tạo ra không thay đổi dưới sự tác động của các tác nhân cơ học bên ngoài. Để làm được việc này, thiết bị cần có cơ cấu nhận biết và tái lập cân bằng theo hai phương X, Y khi tấm phẳng mang đầu phát tia laser không còn song song với mặt phẳng chuẩn. Bài báo giới thiệu các kết quả nghiên cứu về thiết kế, chế tạo thiết bị phát mặt phẳng laser theo nguyên lý bốn khâu bản lề. Các cơ cấu bản lề này được điều khiển bởi các động cơ DC dưới tác động của tín hiệu điều khiển xuất phát từ cảm biến cân bằng. Kết quả chế tạo thử nghiệm và kiểm nghiệm cho thấy thiết bị phát mặt phẳng laser có kết cấu đơn giản, dễ chế tạo, mặt phẳng laser tạo ra ổn định có bán kính xa hơn 100m và độ lệch phẳng không vượt quá ±15mm (ở vị trí xa 100m).
Abstract
Laser-controlled land leveling equipment plays an important roll in the laser leveling system. The equipment’s main operation is always to control the laser gleam surface balance under the impact of the outside mechanical factors. It’s required, the equipment should be to recognize and rebalance in axes X, Y when the plate, which contains the laser gleam head, is no longer parallel to the reference standard plane. The article presents results of research on the design and fabrication of a laser-surface equipment according to the principle of four-bar hinges mechanism. This mechanism is controlled by the DC motors under the control signal derived from the balance sensor. This testing equipment as the prototype has a simple structure, easy fabrication, generated laser surface stable beyond 100 m radius and flat deviation does not exceed ±15mm (at position 100 meters away).
MỤC LỤC
LỜI CAM ĐOAN.. 1
CẢM TẠ.. 1
TÓM TẮT.. 1
MỤC LỤC.. 1
DANH SÁCH CÁC HÌNH.. 1
DANH SÁCH CÁC BẢNG.. 3
Chương 1 MỞ ĐẦU.. 1
1.1 Đặt vấn đề. 1
1.2 Mục tiêu nghiên cứu đề tài1
1.3 Ý nghĩa khoa học và thực tiễn đề tài1
1.4 Phạm vi và nội dung nghiên cứu. 2
1.5 Phương pháp nghiên cứu.3
1.6 Cấu trúc của luận văn. 3
CHƯƠNG 2 TỔNG QUAN.. 5
2.1 Ý nghĩa của việc san phẳng đồng ruộng. 5
2.2 Hệ thống san phẳng đồng ruộng sử dụng kỹ thuật laser. 5
2.2.1 Các thành phần của hệ thống. 5
a) Đầu phát mặt laser. 6
b) Đầu nhận laser. 7
c) Hệ thống điều khiển gàu san. 7
2.2.2 Nguyên lý điều khiển cân bằng của đầu phát mặt laser. 8
2.3 Khảo sát một số đầu phát laser. 9
2.3.1 Đầu phát laser Spectra[13]. 9
a)Kết cấu đầu phát laser Spectra.10
b) Nguyên lý hoạt động. 11
2.3.2 Đầu phát laser Topcon [14]. 11
a) Kết cấu đầu phát laser Topcon. 11
b)Nguyên lý hoạt động. 12
2.3.3 Nhận xét12
CHƯƠNG 3 CƠ SỞ LÝ THUYẾT.. 14
3.1 Một số loại khớp thường được sử dụng trong thiết kế thiết bị tự động.14
3.2 Nguyên lý tạo ra một mặt phẳng cân bằng. 15
3.2.1 Sử dụng cơ cấu robot song song (Hexapod). 15
3.2.2 Phương pháp điều chỉnh cân bằng các thiết bị.17
3.3 Cảm biến cân bằng. 17
CHƯƠNG 4 YÊU CẦU VÀ PHƯƠNG ÁN THIẾT KẾ.. 22
4.1 Thông số thiết kế của thiết bị phát mặt phẳng laser xoay tự cân bằng.22
4.2 Phương pháp tạo ra một mặt laser xoay tròn. 22
4.2.1Phương án 1. 22
4.2.2 Phương án 2. 23
4.3 Phương pháp điều chỉnh mặt phẳng chứa tia laser cân bằng theo phương ngang.24
4.3.1 Phương án 1. 25
4.3.2 Phương án 2. 25
4.4 Phương án lựa chọn động cơ dẫn động cho kết cấu nâng hạ, điều chỉnh mặt phẳng chứa tia laser.26
4.4.1 Phương án 1. 26
4.4.2 Phương án 2. 26
CHƯƠNG 5 TÍNH TOÁN VÀ THIẾT KẾ ĐẦU PHÁT LASER TỰ CÂN BẰNG.. 27
5.1 Mô hình toán của đầu phát mặt laser tự cân bằng. 27
5.1.1 Đề xuất kết cấu đầu phát laser tự cân bằng. 27
5.1.2Nguyên lý làm việc của hệ. 28
5.1.3 Tính toán bậc tự do của hệ. 28
5.1.4 Mối quan hệ giữa góc quay mô tơ và góc quay của mặt cân bằng. 29
5.1.5 Mối quan hệ giữa các góc khi hệ chuyển động cả hai phương. 30
5.2 Xác định ma trận chuyển của tâm mặt chứa tia laser. 30
5.3 Tính toán chọn lựa động cơ dẫn động. 33
5.4 Tính toán chọn nguồn cung cấp cho thiết bị36
5.5 Thiết kế kết cấu của đầu phát laser tự cân bằng. 37
5.5.1 Kết cấu nâng hạ điều chỉnh mặt phẳng cân bằng theo phương ox. 38
5.5.2 Kết cấu nâng hạ điều chỉnh mặt phẳng cân bằng theo phương oy. 38
5.6 Tính toán thiết kế các thành phần của đầu phát laser tự cân bằng. 39
5.6.1 Mặt phẳng cân bằng. 39
5.6.2 Thanh đẩy. 40
5.6.3 Tay quay. 40
5.6.4 Thanh đỡ mặt phẳng cân bằng. 40
5.6.5 Tính toán thiết kế cơ cấu tạo ra tia laser xoay tròn. 41
CHƯƠNG 6 CHẾ TẠO THỬ NGHIỆM... 43
6.1 Chế tạo các bộ phận cơ khí của đầu phát laser tự cân bằng. 43
6.2 Thiết kế chế tạo card điều khiển đầu phát mặt laser tự cân bằng. 44
6.2.1 Tính toán chọn loại cảm biến thích hợp. 47
6.2.2 Thiết kế sơ đồ nguyên lý mạch điều khiển. 48
6.3 Giải thuật điều khiển đầu phát laser tự cân bằng. 52
6.4 Khảo nghiệm và đánh giá khả năng làm việc của thiết bị53
KẾT LUẬN VÀ KIẾN NGHỊ58
KẾT LUẬN.. 58
KIẾN NGHỊ58
DANH SÁCH CÁC HÌNH
Hình 2.2 Sơ đồ hệ thống thủy lực điều khiển gàu san. 8
Hình 2.4: Sơ đồ phương pháp cân bằng theo một phương OX.. 10
Hình 2.5: Đầu phát laser Topcon. 11
Hình 3.1: Cấu tạo kết cấu Hexapod.16
Hình 3.2: Ứng dụng của nguyên lý Hexapod.16
Hình 3.3: Nguyên lý điều chỉnh cân bằng máy đo đạt.17
Hình 3.5: Cảm biến cân bằng nguyên lý ngâm chìm.. 18
Hình 4.1: Đầu phát laser gắn trực tiếp trên đầu động cơ DC.. 22
Hình 4.2: Đầu phát laser kiểu dùng gương phản xạ. 23
Hình 4.3: Nguyên lý để tạo ra mặt phẳng cân bằng.24
Hình 4.4: Cơ cấu bốn khâu bản lề.25
Hình 4.5: Cơ cấu nâng hạ dùng vít me - đai ốc.26
Hình 5.1: Mô hình toán cho mặt phẳng cân bằng nằm ngang.27
Hình 5.2: Nguyên lý cơ cấu nâng hạ mặt phẳng cân bằng.29
Hình 5.3: Sơ đồ tính chọn lựa mô tơ điều chỉnh góc nghiêng.33
Hình 5.4: Tính toán chuyển động cần thiết chọn mô tơ.34
Hình 5.5: Nguyên lý cấu tạo đầu phát mặt laser tự cân bằng.38
Hình 5.6: Kết cấu điều chỉnh cân bằng theo phương ox.38
Hình 5.7: Kết cấu điều chỉnh cân bằng theo phương oy.38
Hình5.8: Mặt phẳng cân bằng.39
Hình5.9: Thanh đẩy.39
Hình 5.11: Thanh đỡ mặt phẳng cân bằng.40
Hình5.12: Cấu tạo bộ phận tạo mặt phẳng laser xoay.41
Hình 5. 13: Mô hình thiết bị phát mặt laser được thiết kế bằng phần mềm Pro.42
Hình 6.4: Sơ đồ điều khiển thiết bị phát mặt phẳng laser xoay tự cân bằng.44
Hình 6.7:Sơ đồ khối hệ thống điều khiển cân bằng.45
Hình 6.8: Sơ đồ khối hệ thống điều khiển tốc độ của động cơ. 46
Hình 6.9: Nguyên lý làm việc của cảm biến cân bằng.47
Hình 6.10: Kiểm tra tín hiệu cảm biến cân bằng.48
Hình 6.11: Sơ đồ nguyên lý mạch điều kiển đầu phát laser tự cân bằng.49
Hình 6.12:Sơ đồ nguyên lý của mạch công suất50
Hình 6.13: Mạch điều khiển sau khi lắp ráp thí nghiệm.51
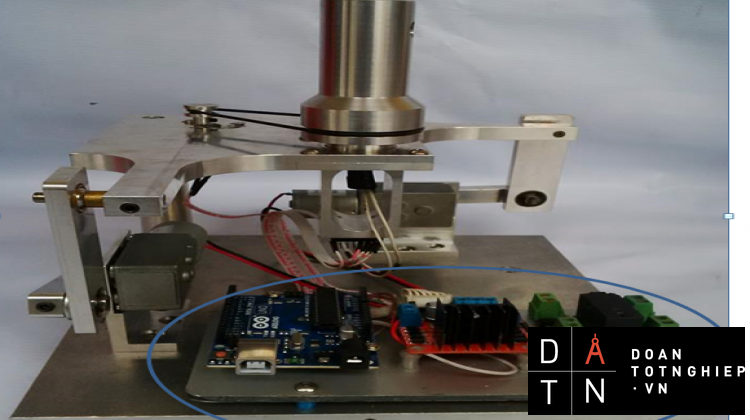
Hình 6.14: Gải thuật điều khiển đầu phát laser tự cân bằng.52
Hình 6.15: Lắp ráp mạch điểu khiển đầu phát laser tự cân bằng.53
1. Phần mở đầu
Chuẩn bị đất là một trong những công đoạn quan trọng trong sản xuất nông nghiệp. Trong đó, khâu làm đất và đặc biệt là khâu san phẳng có ý nghĩa lớn giúp cho mặt đồng ruộng phẳng dễ hứng và thấm nước ở mức tốt nhất. Việc ứng dụng hệ thống san phẳng điều khiển bằng laser tại Việt Nam từ năm 2005 đến năm 2008 cho thấy tiết kiệm được khoảng 25 - 30% lượng nước tưới tiêu, giảm mật độ cỏ dại từ 45 - 66% và cỏ phát sinh chậm hơn và có năng suất lúa cao hơn khoảng 350 kg/ha so với đồng ruộng không san phẳng [4, 5]. Tuy nhiên, việc triển khai trên diện rộng hệ thống san phẳng điều khiển bằng laser đã gặp phải nhiều trở ngại do thiết bị phát mặt phẳng laser phải nhập ngoại, giá thành cao. Ngoài ra, vấn đề bảo trì, sửa chữa không thể chủ động được vì đây là thiết bị công nghệ cao, độc quyền phâỉ phụ thuộc vào đối tác cung cấp. Từ các lý do trên, việc nghiên cứu thiết kế chế tạo hệ thống thiết bị san phẳng đồng ruộng điều khiển bằng laser là cần thiết và cấp bách nhằm đáp ứng nhu cầu, cho phép hạ giá thành, chủ động được công việc sửa chữa, bảo trì. Qua đó, cho phép làm chủ công nghệ để có thể cải tiến, phát triển các kết cấu phù hợp với điều kiện canh tác trong nước, tạo ra sản phẩm cạnh tranh trên thị trường thế giới và góp phần ứng dụng tiến bộ kỹ thuật vào sản xuất nông nghiệp.
2. Nội dung chính
2.1 Hệ thống san phẳng đồng ruộng
Hệ thống san phẳng đồng ruộng điều khiển bằng laser gồm bộ phát laser, bộ nhận tín hiệu laser và hộp điều khiển (xem H. 1).
1. Bộ phát; 2. Xi-lanh thủy lực; 3. Bộ nhận laser; 4. Gàu san; 5. Bộ phận làm mát dầu thủy lực; 6. Ống dầu thủy lực; 7. Van thủy lực; 8. Hộp điều khiển; 9. Máy kéo
H. 1 Sơ đồ nguyên lý hệ thống san phẳng
điều khiển bằng laser [5]
Khi hoạt động, bộ phát laser (1) phát chùm tia tạo thành mặt phẳng laser lan tỏa ra xung quanh, đưa tín hiệu đến máy kéo. Bộ nhận laser (3) lắp cố định trên cụm gàu san (4) có nhiệm vụ nhận tín hiệu, xác định độ cao so với mặt chuẩn từ bộ phát laser và truyền thông tin đến hộp điều khiển (8) khi xe kéo mang gàu san lên/xuống vùng đất cao/trũng. Sau khi xử lý, tín hiệu được truyền tới van thuỷ lực (7) để điều khiển xi-lanh thủy lực (2) nâng hạ gàu san sao cho vạch chuẩn trên bộ nhận (được cài đặt sẵn) luôn nằm trên mặt phẳng laser.
2.2 Thiết bị phát mặt phẳng laser
Thiết bị phát mặt phẳng laser được gắn trên giá đỡ. Khi hoạt động, cảm biến cân bằng sẽ báo trạng thái mất cân bằng của thiết bị so với mặt chuẩn (mặt phẳng ngang) và tự động điều chỉnh tấm cân bằng lắp ụ phát tia laser theo phương ngang. Ụ phát tia laser sẽ hoạt động khi tấm cân bằng song song với mặt chuẩn và đồng thời xoay quanh trục để tạo thành một mặt phẳng laser. Tia laser có bán kính khoảng 100m, tốc độ quay của ụ xoay phát tia laser đạt 300 - 600 vòng/phút, đưa tín hiệu (tia laser) đến bộ nhận laser lắp trên cụm gàu san. H. 2 giới thiệu một thiết bị phát mặt phẳng laser điển hình của công ty Trimple [6].
1. Ụ xoay; 2. Nút nguồn; 3. Nút tạm dừng; 4, 8, 9. Đèn báo trạng thái cân bằng; 5, 10. Núm điều chỉnh; 6. Đèn chỉ báo nguồn; 7. Tay cầm; 11. Chân đế;
H. 2 Thiết bị phát mặt phẳng laser - Trimple [6]
2.3 Cơ sở thiết kế thiết bị phát mặt phẳng laser
2.3.1 Yêu cầu thiết kế
Từ kết quả khảo sát và yêu cầu sử dụng thực tế [6, 7], yêu cầu kỹ thuật của thiết bị phát mặt phẳng laser tự cân bằng cần có như sau:
- Thiết bị hoạt động ổn định ở khu vực ngoài trời;
- Mặt phẳng laser phát ra được tự động cân bằng theo phương ngang;
- Góc cân bằng làm việc: -150 đến +150 ;
- Tốc độ quay của ụ xoay phát tia laser: 300 - 600 vòng/phút;
- Tầm phát xa: 100m;
- Sai số: ±15mm (ở vị trí xa 100m);
- Thời gian hoạt động của pin: 100 giờ.
2.3.2 Cơ cấu tạo ra mặt phẳng laser
Mặt phẳng laser được tạo thành do một nguồn phát tia laser ngang tự xoay tròn quanh trục. Để thực hiện trong thực tế, chúng ta có thể:
- Đặt một đèn laser nằm ngang trên trục của một động cơ DC được lắp đặt thẳng đứng (H. 3a). Tuy nhiên rất khó thiết kế cơ cấu cấp điện và giữ cân bằng cho cho đèn laser.
- Đèn được lắp cố định trên khung và phát ra tia laser theo phương thẳng đứng. Các tia laser được chuyển thành các tia ngang nhờ một gương phản xạ đặt nghiêng một góc 450 và một động cơ truyền động sẽ giúp gương xoay tròn tạo thành một mắt phẳng laser (H. 3b). Tốc độ quay của gương có thể được điều chỉnh qua bộ truyền đai.
a) Gắn đèn laser lên trục động cơ
b) Dùng gương phản xạ
H. 3 Phương án tạo mặt phẳng laser
2.3.2 Cơ cấu giữ cân bằng mặt phẳng laser
Yêu cầu đặt ra cho cơ cấu này là khi có tác nhân từ môi trường ngoài làm cho mặt phẳng laser không còn song song với mặt chuẩn cần phải nhanh chóng điều chỉnh để tái lập vị trí. Các phương án khả thi có thể được xem xét đến như sau:
- Sử dụng cơ cấu vít me - đai ốc bi để làm bộ truyền động tái lập vị trí song song cho mặt phẳng laser. Cơ cấu này có độ phân giải thoả mãn yêu cầu điều khiển vị trí nhưng đòi hỏi kích thước nhỏ, bước ren nhỏ khó chế tạo và có giá thành cao (H. 4a).
- Ứng dụng cơ cấu bốn khâu bản lề để điểu khiển vị trí mặt phẳng laser bằng cách nâng hạ mặt phẳng. Cơ cấu đơn giản, dễ chế tạo và điều khiển (H. 4b).
a) Cơ cấu vítme-đai ốc bi
b) Cơ cấu bốn khâu bản lề
H. 4 Phương án tạo mặt phẳng laser
2.3.3 Kết cấu thiết bị phát mặt phẳng laser tự cân bằng
Nguyên lý kết cấu của thiết bị phát mặt phẳng laser tự cân bằng được thể hiện như H. 5. Thiết bị sử dụng một cảm biến cân bằng (12) gắn cố định trên tấm cân bằng (6) để phát hiện sự sai lệch vị trí (độ nghiêng của mặt phẳng cân bằng theo phương X/Y) và báo về bộ điều khiển. Nếu giá trị sai lệch là dương (H. 5a) bộ điều khiển sẽ kích hoạt động cơ DC (11) quay ngược kim đồng hồ thông qua tay quay (2), thanh đẩy (4) giúp tấm cân bằng (6) quay một góc theo phương OX/OY với gốc là khớp các-đăng (10) để tái lập vị trí cân bằng và ngược lại. Khi động cơ DC (11) hoạt động để tái lập vị trí song song với mặt chuẩn cho tấm cân bằng, bộ điều khiển luôn nhận tín hiệu phản hồi từ cảm biến cân bằng báo về. Động cơ DC sẽ dừng hoạt động khi tín hiệu cảm biến báo tấm cân bằng đã cân bằng (mặt phẳng laser đã tái lập vị trí song song với mặt chuẩn) ở cả hai phương X, Y thì bộ điều khiển sẽ bật đèn laser và kích hoạt động cơ quay ụ xoay (9) thông qua bộ truyền đai làm quay ụ xoay (7). Tia laser được đèn phát ra theo phương thẳng đứng nhờ gương phản xạ bố trí nghiêng 450 chuyển đổi thành phương ngang tạo thành mặt phẳng laser ngang.
1. Tấm đế; 2. Tay quay; 3. Khớp quay; 4. Thanh đẩy;
5. Khớp cầu; 6. Tấm cân bằng; 7. Ụ xoay; 8. Nơi phát
tia laser; 9. Động cơ quay ụ xoay; 10. Khớp các-đăng,
11. Động cơ DC; 12. Cảm biến cân bằng
a) Kết cấu thiết bị phát mặt phẳng laser tự cân bằng
b) Sai lệch và nguyên lý điều chỉnh
H. 5 Kết cấu và nguyên lý điều chỉnh của thiết bị phát mặt phẳng laser tự cân bằng
2.4 Mô hình toán thiết bị phát mặt phẳng laser tự cân bằng
Từ kết cấu đề xuất (xem H. 5) ta có thể khái quát sơ đồ động học thiết bị phát mặt phẳng laser tự cân bằng như sau [1, 3]:
H. 6 Sơ đồ động học
thiết bị phát mặt phẳng laser tự cân bằng
Yêu cầu của bài toán là cần thực hiện điều chỉnh cho mặt phẳng AOB luôn duy trì vị trí song song với mặt phẳng đáy). Ta giả định các phương của mặt phẳng tương ứng với các trục trong tọa độ đề-các có ký hiệu như H. 6. Khớp tại điểm O là khớp các-đăng giúp khống chế mặt phẳng AOB chỉ còn hai bậc tự do: quay quanh OX và quay quanh OY. Lực tạo ra để điều chỉnh cân bằng mặt phẳng AOB được đặt tại O1 và O2 thông qua các cánh tay đòn r1 và r2 tương ứng với các thanh đẩy l1 và l2. Tại vị trí A và B được bố trí khớp cầu để thỏa mãn chuyển động quay liên kết giữa phương OX và phương OY. Ma trận chuyển vị của tâm mặt phẳng AOB (mặt phẳng chứa tia laser) được xác định như sau:
- Khi tấm cân bằng AOB dưới tác động điều chỉnh cân bằng theo cả hai phương OX và OY thì vị trí tâm của mặt phẳng chứa tia laser được xác định theo công thức:
▪ R(x,α), R(y,j) là ma trận chuyển vị của hệ trục UVW quay quanh trục OX một góc α và quay quanh trục OY một góc φ tương ứng.
▪ u là véctơ thể hiện vị trí điểm tâm của mặt phẳng laser trước khi bị tác động lệch một góc nào đó:
- Khi mặt phẳng chứa tia laser mất cân bằng theo phương ngang. Ta điều khiển mặt phẳng tái lập cân bằng theo thứ tự: (i) quay mặt phẳng theo phương OX một góc α, (ii) quay theo phương OY một góc φ. Ta xác định được ma trận chuyển kết quả như sau:
- Nhân ma trận chuyển v và véctơ u ta được vị trí tâm tấm cân bằng AOB sau khi quay quanh trục OX và trục OY:
2.5 Thiết kế mạch điều khiển
2.5.1 Yêu cầu hoạt động
Mạch điều khiển thiết bị phát mặt phẳng laser cần thực hiện được các nhiệm vụ sau:
- Liên tục nhận tín hiệu trạng thái cân bằng từ cảm biến cân bằng;
- Xử lý và tính toán các giá trị nâng/hạ, tốc độ hoạt động của động cơ;
- Gửi tín hiệu điều khiển đến mạch công suất để điều khiển hoạt động của các động cơ, đèn laser.
Sơ đồ điều khiển thiết bị phát mặt phẳng laser bao gồm các cụm điều khiển như ở H. 7.
H. 7 Sơ đồ điều khiển thiết bị phát mặt phẳng laser tự cân bằng
Bộ điều khiển thiết bị được thiết kế theo nguyên lý điều khiển vòng kín. Khi hoạt động, tín hiệu từ cảm biến cân bằng được báo liên tục về vi điều khiển và vi điều khiển sẽ tiến hành phân tích trạng thái và xuất tín hiệu điều khiển các động cơ DC theo phương X và phương Y nhờ mạch công suất. Khi các động cơ X, Y hoạt động sẽ làm cho trạng thái cân bằng thay đổi. Vòng lặp được thực hiện cho đến khi giá trị góc lệch của cả hai phương đạt giá trị cần điều khiển (thiết bị đã thiết lập được vị trí cân bằng). Vi điều khiển sẽ kích mở đèn laser và đồng thời kích động cơ quay ụ xoay hoạt động.
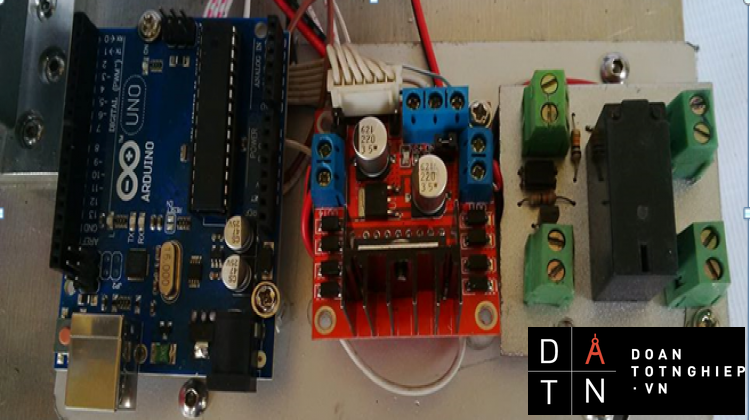
2.5.2 Sơ đồ nguyên lý mạch điều khiển
Sơ đồ nguyên lý hoạt động của mạch điều khiển được thể hiện như H. 8. Ụ xoay phát tia laser và cảm biến cân bằng được lắp đặt theo phương thẳng đứng và có cùng trục tâm. Trục tâm này vuông góc với tấm cân bằng ở tâm. Khi tấm cân bằng mất cân bằng, cảm biến cân bằng sẽ gửi tín hiệu báo trạng thái hiện thời đến vi điều khiển theo nguyên lý I2C [2]. Vi điều khiển sẽ phân tích tín hiệu và xử lý theo hai phương riêng biệt vuông góc nhau (OX và OY).
- Xét trường hợp theo phương OX, nếu cảm biến cân bẳng phát tín hiệu báo góc lệch âm -α thì vi điều khiển sẽ kích mạch công suất L298N [2] điều khiển động cơ DC quay theo chiều thuận OX một góc +α (H. 5b) để nâng tấm cân bằng về vị trí cân bằng và ngược lại. Tùy theo giá trị góc lệch ±α mà vi điều khiển xuất giá trị PWM tương ứng để điều khiển tốc độ động cơ nâng hạ hợp lý.
- Trường hợp phát sinh góc lệch theo phương OY được xử lý tương tự.
H. 8 Sơ đồ nguyên lý mạch điều khiển thiết bị phát laser tự cân bằng
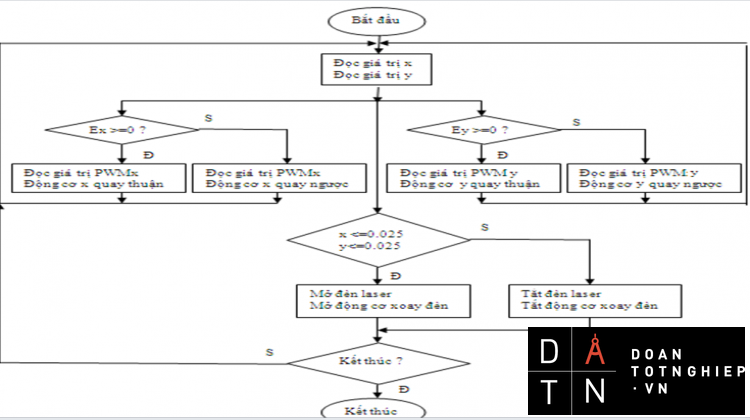
2.5.3 Giải thuật điều khiển
Giải thuật điều khiển thiết bị phát mặt phẳng laser được trình bày ở H. 9. Khi khởi động thiết bị, mạch sẽ khởi tạo và đọc cảm biến để xác định vị trí lệch theo cả hai phương OX và OY so với mặt chuẩn và điều khiển tái lập vị trí theo hai phương riêng biệt.
Để tái lập nhanh vị trí cân bằng ta cần điều khiển chính xác tốc độ và góc quay của động cơ. Bộ điều khiển đáp ứng các yêu cầu đã nêu được sử dụng trong mạch điều khiển là bộ điều khiển PD.
Khi giá trị góc lệch cả hai phương OX và OY có giá trị nhỏ hơn 0.0150, mạch điều khiển kích mở đèn laser và kích động cơ quay ụ xoay tạo thành một mặt phẳng laser. Vòng quét của chương trình điều khiển được thực hiện liên tục cho đến khi nhận được lệnh dừng.
Giải thuật điều khiển thiết bị phát mặt laser tự cân bằng
2.6 Khảo nghiệm đánh giá hoạt động thiết bị
Để kiểm nghiệm độ phẳng theo phương ngang của mặt laser được phát ra khi thiết bị hoạt động ta thử nghiệm dựa vào mặt hồ nước. Thiết bị phát mặt phẳng laser được bố trí ở giữa hồ nước như ở H. 10 và được đặt trên giá 3 chân trong điều kiện không gió. Sau khi lắp đặt, thiết bị tiến hành ghi nhận giá trị độ nghiêng so với phương ngang và sẽ tự điều chỉnh để đạt được vị trí song song với mặt phẳng ngang (vị trí cân bằng) và kích hoạt đèn laser để phát ra mặt phẳng laser. Hai thước đo có độ phân giải mm được bố trí ở hai điểm khác gần bờ cách xa khoảng 100m sao cho mực nước của mặt hồ ngang bằng vạch chuẩn của thước. Tiến hành đánh nghiêng thiết bị phát laser một góc bất kỳ (α < 100) so với phương ngang, thiết bị sẽ tắt đèn phát mặt phẳng laser và tự động điều chỉnh tái lập vị trí cân bằng. Đến khi vị trí cân bằng được tái lập, thiết bị sẽ kích hoạt đèn phát lại mặt phẳng laser.
H. 10 Sơ đồ bố trí khảo nghiệm thiết bị
phát laser tự cân bằng
Khi vận hành thiết bị phát mặt phẳng laser, tiến hành chụp ảnh xác định giá trị của vạch sáng laser trên thước ta có được các kết quả đo đạc sau:
H. 11 Sai lệch của mặt phẳng laser theo phương OX
H. 12 Sai lệch của mặt phẳng laser theo phương OY
Kết quả khảo nghiệm độ lệch theo phương OX (H. 11), phương OY (H. 12) và số liệu đo đạc được thể hiện trong bảng 1. Nhìn vào biểu đồ ở H. 11 ta thấy mặt laser có độ sai lệch tối đa so với phương OX là 14mm ở khoảng cách 100m, với phương OY cũng có độ sai lệch lớn nhất là 14 mm. Biểu đồ ở H. 13 cho thấy vị trí mặt phẳng laser ở khoảng cách 100 m có độ dịch chuyển từ -14mm đến +12mm. Nguyên nhân có thể là do độ chính xác chế tạo của ụ xoay, độ chính xác truyền động của các động cơ.
Bảng 1 Kết quả khảo nghiệm sơ bộ
thiết bị phát laser tự cân bằng
|
STT |
Độ lệch theo phương OX (mm) |
Độ lệch theo phương OY (mm) |
|
1 |
-12 |
7 |
|
2 |
0 |
9 |
|
3 |
0 |
-11 |
|
4 |
-14 |
5 |
|
5 |
-6 |
10 |
|
6 |
-2 |
12 |
|
7 |
8 |
7 |
|
8 |
0 |
4 |
|
9 |
-9 |
-13 |
|
10 |
-9 |
-14 |
|
11 |
12 |
-7 |
|
12 |
6 |
-12 |
|
13 |
10 |
0 |
|
14 |
11 |
3 |
|
15 |
-13 |
8 |
H. 13 Sai lệch của mặt phẳng laser
so với phương OX và OY
3. Kết luận
Từ yêu cầu làm chủ công nghệ và cung cấp cho thị trường một sản phẩm công nghệ cao với giá cả hợp lý; góp phần đưa tiến bộ kỹ thuật vào sản xuất nông nghiệp, thiết bị phát mặt phẳng laser đã được nghiên cứu chế tạo thành công. Qua thử nghiệm, thiết bị đạt được các yêu cầu:
1. Xây dựng được mô hình toán xác định tâm của tấm cân bằng;
2. Đề xuất giải thuật phù hợp, sử dụng nguyên lý điều khiển PD, thiết kế và lắp đặt thành công mạch điều khiển;
3. Mạch điều khiển sử dụng vi điều khiển dòng ATMEGA cho phép điều khiển tốc độ và góc quay của động cơ với độ nhạy, độ chính xác cao;
4. Sai số hoạt động của thiết bị đạt được các yêu cầu đề ra, thiết bị có sai số ±14 mm ở độ xa 100m. Tầm phát xa của tia laser trên 100m và thời gian hoạt động của pin theo tính toán đạt trên 100 giờ;
5. Thiết bị có kết cấu đơn giản, dễ chế tạo phù hợp với trình công nghệ trong nước.
.................................
KẾT LUẬN VÀ KIẾN NGHỊ
KẾT LUẬN
Từ yêu cầu làm chủ công nghệ và cung cấp cho thị trường một sản phẩm công nghệ cao - thiết bị phát mặt phẳng laser - với giá cả hợp lý; góp phần đưa tiến bộ kỹ thuật vào sản xuất nông nghiệp, thiết bị phát mặt phẳng laser đã được nghiên cứu chế tạo thành công. Qua thử nghiệm, thiết bị đạt được các yêu cầu:
1. Xây dựng được mô hình toán xác định tâm của mặt cân bằng;
2. Đề xuất giải thuật phù hợp, sử dụng nguyên lý điều khiển PD, thiết kế và lắp đặt thành công mạch điều khiển.
3. Mạch điều khiển sử dụng vi điều khiển dòng ATMEGA cho phép điều khiển tốc độ và góc quay của động cơ với độ nhạy, độ chính xác cao.
4. Sai số hoạt động của thiết bị đạt được các yêu cầu đề ra, thiết bị có sai số ±14 mm ở độ xa 100m. Tầm phát xa của tia laser trên 100m và thời gian hoạt động của pin theo tính toán đạt trên 100 giờ.
5. Thiết bị có kết cấu đơn giản, dễ chế tạo phù hợp với trình công nghệ trong nước.
So với thiết bị ngoại nhập, độ sai số là ±10mm ở khoảng cách 100m, thiết bị tự chế tạo gần như tương đương cho thấy tiềm năng ứng dụng rất lớn vào khâu san phẳng đồng ruộng giúp giảm chi phí sản xuất và tăng tính cạnh tranh cho sản phẩm nông nghiệp của Việt Nam.
KIẾN NGHỊ
Để sớm có thể thương mại hoá bộ phát mặt phẳng laser cần tiến hành nghiên cứu các nội dung sau:
- Nghiên cứu thiết kế kiểu dáng công nghiệp phù hợp với thẩm mỹ và thực tiễn sử dụng thiết bị ở Việt Nam.
- Nghiên cứu quy trình công nghệ vỏ hộp để có thể sản xuất các vỏ hộp phù hợp thẩm mỹ và đảm bảo kín khít, chống được các tác nhân từ môi trường bên ngoài như: bụi đất, nước mưa, nhiệt độ, …
- Nghiên cứu nâng cao độ chính xác chế tạo, lắp ráp các chi tiết cơ khí để có thể giảm sai số tia phát laser ở tầm xa 100m xuống dưới 10mm.
- Triển khai thực nghiệm trên diện rộng để đánh giá hiệu quả hoạt động của thiết bị để có thể điều chỉnh, thiết kế bộ phát mặt phẳng laser hoàn thiện hơn.




