LUẬN VĂN THẠC SĨ Nghiên cứu ảnh hưởng của dao động đầu hàn, góc nghiêng mỏ hàn đến hình dáng bên ngoài của mối hàn trong liên kết hàn góc

NỘI DUNG ĐỒ ÁN
LUẬN VĂN THẠC SĨ Nghiên cứu ảnh hưởng của dao động đầu hàn, góc nghiêng mỏ hàn đến hình dáng bên ngoài của mối hàn trong liên kết hàn góc
LỜI CẢM ƠN
Với sự cố gắng của bản thân, niềm tâm huyết với đề tài đã giúp em hoàn thành đồ án tốt nghiệp đúng thời hạn.
Và để có được kết quả đó, em xin trân thành cảm ơn các thầy cô giáo thuộc bộ môn Hàn và gia công kim loại tấm đã giảng dạy, giúp đỡ em trong quá trình học tập tại trường Đại học Sư phạm Kỹ thuật Hưng Yên.
Đặc biệt, cho phép em gửi lời cảm ơn sâu sắc nhất tới thầy giáo Th.s.Đinh Văn Bân – người đã tận tình hướng dẫn, giúp đỡ, động viên để em có thể hoàn thành đề tài một cách tốt nhất.
Em xin gửi lời cảm ơn đến các bạn sinh viên lớp HK5 - Trường Đại học Sư phạm Kỹ thuật Hưng Yên đã ủng hộ và tạo điều kiện để em hoàn thành được khoá luận của mình. Cảm ơn bạn bè, người thân đã ủng hộ, giúp đỡ, động viên, khuyến khích em trong suốt quá trình thực hiện đề tài.
Mặc dù đă hết sức cố gắng, nhưng với năng lực, kinh nghiệm và thời gian cóhạn nên đồ án của em sẽ không tránh khỏi những sơ xuất. Em xin trân trọng cảm ơn những ý kiến đóng góp của các Thầy và các bạn để bản luận văn của em được hoàn thiện hơn.
Em xin trân thành cảm ơn!
MỤC LỤC
Trang
LỜI CẢM ƠN.. 1
MỤC LỤC.. 2
DANH MỤC CÁC KÝ HIỆU, CHỮ VIẾT TẮT.. 4
DANH MỤC BẢNG BIỂU.. 5
DANH MỤC CÁC HÌNH VẼ, ĐỒ THỊ6
MỞ ĐẦU.. 9
- Lý do chọn đề tài9
- Mục đích, đối tượng, phạm vi và phương pháp nghiên cứu.10
Chương 1 – TỔNG QUAN VỀ CÔNG NGHỆ HÀN HỒ QUANG TRONG MÔI TRƯỜNG KHÍ BẢO VỆ 11
1.1. Thực chất, đặc điểm và phạm vi ứng dụng. 11
1.1.1. Thực chất và đặc điểm.. 11
1.1.2. Phạm vi ứng dụng. 12
1.2. Vật liệu, thiết bị hàn HQ nóng chảy trong môi trường khí bảo vệ. 13
1.2.1. Vật liệu hàn. 13
1.2.2. Trang bị hàn. 16
1.3. Cơ khí hóa, tự động hóa quá trình hàn (Robot hàn). 20
1.3.1. Robot Almega AX-V6.20
1.3.2.Cấu tạo các bộ phận chính của Robot AX-V6. 22
Chương 2 – KIẾN THỨC LÝ THUYẾT LIÊN QUAN.. 30
2.1. Công nghệ hàn hồ quang nóng chảy trong môi trường khí bảo vệ. 30
2.1.1. Chuẩn bị liên kết trước khi hàn. 30
2.1.2. Các dạng truyền kim loại lỏng đặc trưng vào vũng hàn. 31
2.1.4. Xác định chế độ hàn tự động. 34
2.1.5. Kỹ thuật hàn. 46
Chương 3 – NHỮNG YẾU TỐ ẢNH HƯỞNG ĐẾN HÌNH DẠNG KÍCH THƯỚC MỐI HÀN 51
3.1. Ảnh hưởng của chế độ hàn.51
3.1.1. Ảnh huởng của cường độ dòng diện hàn. 51
3.1.2. Ảnh huởng của diện áp hàn. 52
3.1.3 Ảnh huởng của tiết diện diện cực. 53
3.1.4 Ảnh huởng của tốc dộ hàn. 53
3.2. Ảnh hưởng của chế độ dao động đầu hàn khi giữ nguyên chế độ hàn. 54
3.2.1. Ảnh hưởng của góc nghiêng mỏ hàn đến biên dạng mối hàn. 54
3.2.2. Ảnh hưởng của kiểu dao động mỏ hàn đến biên dạng mối hàn. 55
3.2.3. Ảnh hưởng của biên độ dao động đầu hàn đến biên dạng mối hàn. 57
3.2.4. Ảnh hưởng của tần số dao động đầu hàn đến biên dạng mối hàn. 58
3.2.5. Ảnh hưởng của thời gian dừng của đầu hàn ở hai cạnh mối hàn.58
3.2.6. Mối quan hệ giữa thời gian dừng, thời gian dao động và thời gian chu kỳ dao động 59
Chương 4 – THỰC HÀNH THÍ NGHIỆM... 63
4.1. Mục đích và ý nghĩa của thí nghiệm.. 63
4.1.1. Mục đích. 63
4.1.2. Ý nghĩa. 63
4.2. Phương pháp hoạch định thực nghiệm.. 63
4.2.1. Các bước quy hoạch trực giao cấp I. 64
4.2.2. Bài toán tối ưu. 66
4.3. Xây dựng bài tập thí nghiệm.. 67
4.3.1. Cơ sở lý thuyết thí nghiệm.. 67
4.3.2. Xác định chế độ hàn tự động cho Robot AX-V6. 67
4.3.3. Các bài tập thí nghiệm.. 71
Chương 5 – KẾT QUẢ THÍ NGHIỆM ĐÁNH GIÁ HIỆU QUẢ VÀ ĐƯA RA CHẾ ĐỘ DAO ĐỘNG ĐẦU HÀN HỢP LÝ.. 95
5.1. Phân tích, đánh giá kết quả thí nghiệm.. 95
5.2. Kết luận và đưa ra chế độ dao động đầu hàn hợp lý. 96
KẾT LUẬN VÀ KIẾN NGHỊ98
- Kết luận:98
- Kiến nghị:98
TÀI LIỆU THAM KHẢO.. 99
DANH MỤC CÁC KÝ HIỆU, CHỮ VIẾT TẮT
1) Th.s: Thạc sỹ.
2) HQ: Hồ quang
3) GMAW (Gas Metal Arc Welding): Hàn hồ quang nóng chảy trong môi trường khí bảo vệ.
4) MAG (Metal Active Gas): Phương pháp hàn hồ quang nóng chảy trong môi trường khí bảo vệ là khí hoạt tính.
5) MIG (Metal Inert Gas): Phương pháp hàn hồ quang nóng chảy trong môi trường khí bảo vệ là khí trơ.
6) TIG (Tungsten Inert Gas): Hàn nóng chảy trong môi trường khí bảo vệ là khí trơ. Với điện cực không nóng chảy bằng Vonfram.
7) SAW: Hàn hồ quang chìm.
8) AWS (American Welding Society): Tiêu chuẩn về hàn theo tiêu chuẩn Mỹ.
9) HDTKDA: Hướng dẫn thiết kế đồ án.
DANH MỤC BẢNG BIỂU |
Trang |
Bảng 1.1 - Một số điện cực dùng cho hàn thép cacsbon thấp và thép hợp kim thấp |
14 |
Bảng 1.2 - Một số loại khí bảo vệ tương ứng với kim loại cơ bản |
16 |
Bảng 1.3 - Một số khả năng phối hợp các bậc chuyển động chính |
24 |
Bảng 1.4 - Thông số đặc tính tiêu chuẩn của Robot hàn Almega-AX-V6 |
28 |
Bảng 2.1 - Chọn khí bảo vệ để có kiểu chuyển dịch |
34 |
Bảng 2.2 - Mật độ dòng điện hàn (A/mm2) |
34 |
Bảng 2.3 – Thông số chế độ hàn cho thép cacbon thấp và thép hợp kim thấp với hồ quang ngắn mạch, khí bảo vệ 100% CO2 liên kết hàn chồng, góc bằng và liên kết giáp mối |
43 |
Bảng 2.4 – Thông số chế độ hàn cho thép cacbon thấp và thép hợp kim thấp với hồ quang ngắn mạch, khí bảo vệ 100% CO2 liên kết hàn góc và giáp mối ở vị trí hàn đứng từ trên xuống |
44 |
Bảng 2.5 – Thông số chế độ hàn cho thép cacbon thấp và thép hợp kim thấp với hồ quang ngắn mạch, khí bảo vệ 75%Ar/25% CO2 liên kết hàn góc ở vị trí hàn đứng từ dưới lên |
45 |
Bảng 3.1 - Kết quả thí nghiệm với chế độ hàn: Ih = 150A, Uh = 22V, Vh = 23 cm/phút, chiều dài đường hàn là L = 23 cm. |
60 |
Bảng 3.2 – Thí nghiệm khảo sát tần số dao động với thời gian dừng. |
61 |
|
71 |
74 |
|
77 |
|
82 |
|
88 |
|
92 |
|
95 |
DANH MỤC CÁC HÌNH VẼ, ĐỒ THỊ |
Trang |
|
Chương 1 |
|
|
Hình 1.1 – Sơ đồ hàn nóng chảy trong môi trường khí bảo vệ. |
11 |
|
Hình 1.2 - Đặc tính V-A của thiết bị CC và CV |
19 |
|
Hình 1.3 - Cơ chế điều chỉnh điện áp hồ quang |
20 |
|
Hình 1.4 – Sơ đồ cấu hình chính của Robot hàn Almega-AX-V6 |
21 |
Hình 1.5 – Mô hình tay máy |
23 |
|
Hình 1.6 – Độ vươn và góc quay của cánh tay Robot. |
24 |
|
Hình 1.7 – Bộ điều khiển AX-C |
25 |
|
Hình 1.8 – Bảng dạy. |
26 |
|
Hình 1.9 – Hộp thao tác |
27 |
|
Chương 2 |
|
|
Hình 2.1 – Chuẩn bị liên kết hàn góc. |
30 |
|
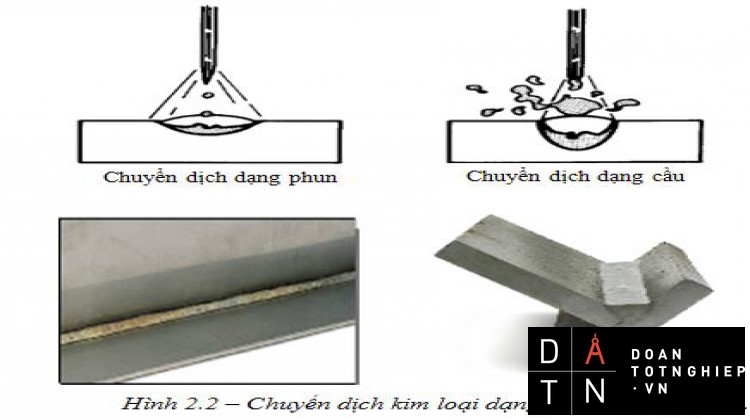
Hình 2.2 – Chuyển dịch kim loại dạng cầu và dạng phun. |
33 |
|
Hình 2.3 – Tốc độ cấp dây và tốc độ chảy của dây hàn. |
38 |
|
Hình 2.4 – Cường độ dòng điện và tốc độ cấp dây hàn. |
38 |
|
Hình 2.5 – Sự phụ thuộc của yn vào cường độ dòng điện hàn (dòng xoay chiều). |
41 |
|
Hình 2.6 – Góc độ hàn với hồ quang ngắn mạch |
47 |
|
Hình 2.7 - Độ nhú điện cực |
48 |
|
Hình 2.8 - Các dạng quỹ đạo di chuyển que/dây hàn theo yêu cầu liên kết khác nhau của công nghệ hàn |
49 |
|
Hình 2.9 - Hình biểu diễn mối tương quan giữa quỹ đạo lấy mẫu và quỹ đạo công nghệ |
49 |
|
Chương 3 |
|
|
Hình 3.1 - Sự thay dổi hình dạng mối hàn theo cuờng độ dòng điện hàn |
52 |
|
Hình 3.2 - Sự thay dổi hình dạng mối hàn và mức tiêu thụ thuốc hàn theo diện áp hàn |
52 |
|
Hình 3.3 - Sự thay dổi hình dạng mối hàn theo tiết diện điện cực hàn |
53 |
|
Hình 3.4 - Ảnh huởng của tốc độ hàn lên sự phân bố lực trong hồ quang (a), hình dạng mối hàn (b), và mức độ tiêu thụ thuốc hàn(c).
|
54 |
|
Hình 3.5 - Ảnh hưởng của tư thế cầm vòi hàn đến biên dạng mối hàn |
55 |
|
Hình 3.6 - Ảnh hưởng của biên độ dao động đến biên dạng mối hàn |
57 |
|
Hình 3.7 - Ảnh hưởng của tần số dao động đến biên dạng mối hàn |
58 |
|
Hình 3.8 – Sự ảnh hưởng đến biên dạng mối hàn khi thay đổi thời gian dừng |
59 |
|
Hình 3.9 – Xu hướng dao động của đầu hàn |
60 |
|
Hình 3.10 – Quan hệ giữa tần số dao động và thời gian dao động. |
62 |
|
Chương 4 |
|
|
Hình 4.1 – Cường độ dòng điện và tốc độ cấp dây hàn. |
69 |
|
Hình 4.2 – Tốc độ cấp dây và tốc độ chảy của dây hàn. |
70 |
|
Hình 4.3 – Chương trình hàn thí nghiệm thay đổi kiểu dao động đầu hàn. |
73 |
|
Hình 4.4 – Bảng thông số chế độ dao động |
73 |
|
Hình 4.5 – Chương trình hàn thí nghiệm thay đổi tần số dao động đầu hàn. |
76 |
|
Hình 4.6 – Bảng thông số chế độ dao động đầu hàn |
76 |
|
Hình 4.7 – Biên dạng mối hàn thí nghiệm với f = 0,5 Hz |
78 |
|
Hình 4.8 – Biên dạng mối hàn thí nghiệm với f = 7Hz |
78 |
|
Hình 4.9 – Biên dạng mối hàn thí nghiệm với f = 20Hz |
79 |
|
Hình 4.10 – Ảnh hưởng của tần số dao động đến biên dạng mối hàn. |
80 |
|
Hình 4.11 – Chương trình hàn thí nghiệm thay đổi thời gian dừng. |
81 |
|
Hình 4.12 – Bảng thông số chế độ hàn thí nghiệm thay đổi thời gian dừng. |
82 |
|
Hình 4.13 – Biên dạng mối hàn khi thí nghiệm với td = (0,2-0,4)s |
83 |
|
Hình 4.14 – Biên dạng mối hàn khi thí nghiệm với td = (0,6-06)s |
84 |
|
Hình 4.15 – Biên dạng mối hàn khi thí nghiệm với td = (1,0-1,0)s |
85 |
|
Hình 4.16 – Ảnh hưởng của tần số dao động đến biên dạng mối hàn. |
85 |
|
Hình 4.17 – Biên dạng mối hàn thí nghiệm với hàn dũi. |
87 |
|
Hình 4.18 – Biên dạng mối hàn thí nghiệm với hàn vuông góc. |
88 |
|
Hình 4.19 – Biên dạng mối hàn thí nghiệm với hàn kéo. |
89 |
|
Hình 4.20 – Chương trình hàn thí nghiệm thay đổi biên độ dao động |
89 |
|
Hình 4.21 – Bảng thông số chế độ hàn thí nghiệm thay đổi biên độ dao động |
91 |
|
Hình 4.22 – Biên dạng mối hàn khi biên độ dao động nhỏ |
91 |
|
Hình 4.23 – Biên dạng mối hàn khi biên độ dao động lớn |
93 |
|
Hình 4.24 – Ảnh hưởng của biên độ dao động đến biên dạng, kích thước mối hàn. |
93 |
|
Hình 4.25 – Ảnh hưởng của biên độ dao động đến biên dạng, kích thước mối hàn. |
94 |
|
Chương 5 |
|
|
Hình 5.1 – Mối quan hệ giữa tần số dao động và thời gian dừng của đầu hàn. |
97 |
|
Hình 5.2 – Mối quan hệ giữa biên độ dao động và thời gian dừng của đầu hàn. |
97 |
MỞ ĐẦU
- Lý do chọn đề tài
Trong những năm gần đây, công nghệ hàn đang có những bước phát triển mạnh mẽ. Nước ta đang trong quá trình công nghiệp hoá, hiện đại hoá thì vai trò của công nghệ hàn ngày càng quan trọng. Chúng ta có thể gặp công nghệ hàn từ những vật dụng, kết cấu đơn giản như khung cửa sổ, khung xe đạp, xe máy…đến những chi tiết lớn hơn, hiện đại hơn như tàu vận tải, máy bay, tàu vũ trụ…Để thiết kế được những vật dụng ấy, vai trò của kỹ sư hàn là rất lớn. Có nhiều phương pháp công nghệ hàn khác nhau để chế tạo những vật dụng, kết cấu đó như: Hàn hồ quang tay, hàn bán tự động và hàn tự động. Sự quan tâm lớn nhất ở đây là về chất lượng và tính kinh tế mà đối với từng vật dụng và kết cấu khác nhau người ta dùng các phương pháp hàn khác nhau. Hàn hồ quang tay là phương pháp hàn đầu tiên trong các phương pháp hàn hồ quang nóng chảy. Với sự phát triển của nên công nghiệp hiện đại thì có rất nhiều các phương pháp hàn khác nhau ra đời như: Hàn bán tự động trong môi trường khí bảo vệ, hàn tự động dưới lớp thuốc, hàn robot,….
Công nghệ hàn trong môi trường khí bảo vệ được phát triển mạnh mẽ trong các nganh công nghiệp sản xuất, chế tạo. Từ hàn bán tự động đến hàn tự động với yêu cầu về năng suất cao, yêu cầu về giá thành. Và hàn robot đang được ứng dụng rất rộng rãi trong ngành sản xuất xe máy, ôtô, máy bay,…
Mục tiêu ứng dụng Robot trong công nghiệp là nhằm nâng cao năng suất dây chuyền công nghệ, nâng cao chất lượng và khả năng cạnh tranh của sản phẩm, đồng thời cải thiện điều kiện lao động. Sự cạnh tranh hàng hoá đặt ra một vấn đề thời sự là làm sao để hệ thống tự động hoá sản xuất phải có tính linh hoạt cao nhằm đáp ứng sự biến động thường xuyên của thị trường hàng hoá cạnh tranh. Robot công nghiệp là bộ phận cấu thành không thể thiếu trong việc tạo ra những hệ thống sản xuất linh hoạt đó.
Ở nhiều trường đại học, cao đẳng và cao đẳng nghề đã bắt đầu giảng dạy về Robot. Đặc biệt trong những năm gần đây xu thế nhập Robot công nghiệp ở các trường nghề ngày càng gia tăng để phục vụ cho học sinh, sinh viên thực tập, tiếp cận dần với nền sản xuất hiện đại. Tuy nhiên sự chuyển giao công nghệ của nhà sản xuất chưa thật như ý muốn, chưa tận dụng khai thác triệt để của thiết bị. Là một kỹ sư tương lai, em mong muốn góp phần nhỏ bé của mình vào công cuộc chung của nhà trường là đào tạo các công nhân trình độ cao, em mạnh dạn chọn đề tài này làm đồ án tốt nghiệp: “Nghiên cứu ảnh hưởng của dao động đầu hàn, góc nghiêng mỏ hàn đến hình dáng bên ngoài của mối hàn trong liên kết hàn góc.”
- Mục đích, đối tượng, phạm vi và phương pháp nghiên cứu.
Để khảo sát và nghiên cứu ảnh hưởng của chế độ dao động đầu hàn, góc nghiêng mỏ hàn đến biên dạng của mối hàn ta phải làm các thí nghiệm để thấy được rõ ràng và chính xác sự ảnh hưởng này thì trong quá trình nghiên cứu thí nghiệm các thông số chế độ hàn cần được giữ nguyên không thay đổi, ta chỉ thay đổi chế độ dao động và góc nghiêng mỏ hàn. Để đáp ứng được điều kiện này thì việc thực hành thí nghiệm trên Robot rất thuận lợi và có kết quả chính xác.
- Mục đích:
Thấy rõ được quá trình dao động của đầu hàn trong quá trình hàn qua thí nghiệm thực nghiệm. Khắc phục được những lỗi, khuyết tật trong quá trình hàn và lập ra chế độ dao động đầu hàn hợp lý và tối ưu nhất.
- Đối tượng:
Nghiên cứu ảnh hưởng của dao động đầu hàn, góc nghiêng mỏ hàn đến hình dáng bên ngoài của mối hàn trong liên kết hàn góc. Thực hành hàn thí nghiệm với thép carbon thấp trên Robot hàn Allmega AX-V6.
- Phạm vi nghiên cứu:
Nghiên cứu sự ảnh hưởng của các yếu tố chế độ hàn và chế độ dao động đầu hàn đến biên dạng mối hàn. Đặc biệt, ở đây ta nghiên cứu chủ yếu ảnh hưởng của chế độ dao động của đầu hàn như: Kiểu dao động, góc nghiêng mo hàn, tần số dao động, thời gian dừng và biên độ dao động của đầu hàn.
- Phương pháp nghiên cứu:
Nghiên cứu lý thuyết và áp dụng thực hành hàn thí nghiệm.
Chương 1 – TỔNG QUAN VỀ CÔNG NGHỆ HÀN HỒ QUANG TRONG MÔI TRƯỜNG KHÍ BẢO VỆ
1.1. Thực chất, đặc điểm và phạm vi ứng dụng
1.1.1. Thực chất và đặc điểm
Hàn hồ quang nóng chảy trong môi trường khí bảo vệ là quá trình hàn nóng chảy trong đó nguồn nhiệt hàn được cung cấp bởi hồ quang tạo ra giữa điện cực nóng chảy (dây hàn) và vật hàn; hồ quang và kim loại nóng chảy được bảo vệ khỏi tác dụng của Oxy và Nitơ trong môi trường xung quanh bởi một loại khí hoặc một hỗn hợp khí. Tiếng Anh phương pháp này gọi là GMAW (Gas Metal Arc Welding).
Hình 1.1 – Sơ đồ hàn nóng chảy trong môi trường khí bảo vệ.
Khí bảo vệ có thể là khí trơ (Ar; He hoặc hỗn hợp Ar+He) không tác dụng với kim loại lỏng trong khi hàn hoặc là các loại khí hoạt tính (CO2; CO2+O2; CO2+Ar...) có tác dụng đẩy không khí ra khỏi vùng hàn và hạn chế tác dụng xấu của nó.
Khi điện cực hàn hay dây hàn được cấp tự động vào vùng hồ quang thông qua cơ cấu cấp dây, còn sự dịch chuyển hồ quang dọc theo mối hàn được thao tác bằng tay thì gọi là hàn hồ quang bán tự động trong môi trường khí bảo vệ. Nếu tất cả chuyển động cơ bản được cơ khí hoá thì được gọi là hàn hồ quang tự động trong môi trường khí bảo vệ.
Hàn hồ quang bằng điện cực nóng chảy trong môi trường khí trơ (Ar; He) tiếng Anh gọi là phương pháp hàn MIG (Metal Inert Gas). Vì các loại khí trơ có giá thành cao nên không được ứng dụng rộng rãi, chỉ dùng để hàn kim loại màu và thép hợp kim.
Hàn hồ quang bằng điện cực nóng chảy trong môi trường khí hoạt tính (CO2; CO2+O2...) tiếng Anh gọi là phương pháp hàn MAG (Metal Active Gas). Phương pháp hàn MAG sử dụng khí bảo vệ CO2được phát triển rộng rãi do có rất nhiều ưu điểm:
- CO2 là loại khí dễ kiếm, dễ sản xuất và giá thành thấp.
- Năng suất hàn trong CO2 cao, gấp hơn 2,5 lần so với hàn hồ quang tay.
- Tính công nghệ của hàn CO2 cao hơn so với hàn hồ quang dưới lớp thuốc vì có thể tiến hành ở mọi vị trí không gian khác nhau.
- Chất lượng hàn cao, sản phẩm hàn ít bị cong vênh do tốc độ hàn cao, nguồn nhiệt tập trung, hiệu suất sử dụng nhiệt lớn, vùng ảnh hưởng nhiệt hẹp.
- Điều kiện lao động tốt hơn so với với hàn hồ quang tay và trong quá trình hàn không phát sinh khí độc.
1.1.2. Phạm vi ứng dụng
Trong nền công nghiệp hiện đại, hàn hồ quang nóng chảy trong môi trường khí bảo vệ chiếm một vị trí rất quan trọng. Nó không những có thể hàn các loại thép kết cấu thông thường mà còn có thể hàn các loại thép không gỉ, thép chịu nhiệt, thép bền nóng, các hợp kim đặc biệt, các hợp kim nhôm, magiê, niken, đồng, các hợp kim có ái lực hoá học mạnh với ôxy.
GMAW có thể được thực hiện bán tự động hoặc tự động. Ngày nay chúng được sử dụng rộng rãi cho các công việc hàn nhờ vào ưu điểm:
- Năng suất cao
- Giá thành thấp
- Năng lượng hàn thấp, ít biến dạng nhiệt
- Hàn được hầu hết các kim loại
- Dễ tự động hóa
Phương pháp này có thể sử dụng được ở mọi vị trí trong không gian, chiều dày vật hàn từ (0,4÷4,8) mm thì chỉ cần hàn một lớp mà không phải vát mép; từ (1,6÷10) mm hàn một lớp có vát mép; còn từ (3,2÷25) mm thì hàn nhiều lớp.
1.2. Vật liệu, thiết bị hàn HQ nóng chảy trong môi trường khí bảo vệ
1.2.1. Vật liệu hàn
vDây hàn
Dây hàn thép carbon là dây rắn có hàm lượng hợp kim thấp, được kéo với độ chính xác cao có đường kính từ Ø0,6mm đến Ø2,4mm. Dây hàn được quấn thành cuộn 15 đến 20kg Hoặc chứa sẳn trong thùng (trường hợp hàn tự động). Dây hàn được mạ một lớp đồng để dẫn điện và chống oxýt hóa .Thành phần dây hàn như sau: Carbon (C: 0,06 đến 0,08%), Mangan (Mn: 1,0 đến 1,5%), Silic (Si: 0,6 đến 0,9%), Lưu hùynh (S: 0,025%) và Phospho (P: 0,025%).
Mật độ dòng điện: Mật độ dòng điện là cường độ đi qua 1mm2 tiết diện dây hàn.
Khi hàn trong môi trường khí bảo vệ, sự hợp kim hoá kim loại mối hàn cũng như các tính chất yêu cầu của mối hàn được thực hiện chủ yếu thông qua dây hàn. Do vậy, những đặc tính của quá trình công nghệ hàn phụ thuộc rất nhiều vào tình trạng và chất lượng dây hàn. Khi hàn MAG, đường kính dây hàn từ 0,8÷2,4 mm.
Sự ổn định của quá trình hàn cũng như chất lượng của liên kết hàn phụ thuộc nhiều vào tình trạng bề mặt dây hàn. Cần chú ý đến phương pháp bảo quản, cất giữ và biện pháp làm sạch dây hàn nếu dây bị gỉ hoặc bẩn. Một trong những cách để giải quyết là sử dụng dây có bọc lớp mạ đồng. Dây mạ đồng sẽ nâng cao chất lượng bề mặt và khả năng chống gỉ, đồng thời nâng cao tính ổn định của quá trình hàn.
Theo hệ thống tiêu chuẩn AWS, ký hiệu dùng cho dây hàn thép C như sau:
ER 70 S - X
Trong đó: ER- Ký hiệu điện cực hàn hoặc que hàn phụ.
70: Độ bền kéo nhỏ nhất (ksi).
S: Dây hàn đặc.
X: Thành phần hóa học và khí bảo vệ.
Bảng 1.1 - Một số điện cực dùng cho hàn thép cacsbon thấp và thép hợp kim thấp
|
Điện cực |
Tiêu chuẩn AWS |
Đường kính điện cực (d) |
Khoảng dòng điện |
|
ER70S-1 |
A5.18 |
0,5 |
- |
- Khí bảo vệ
Nhìn chung mọi kim loại đều có xu hướng kết hợp với Oxy để tạo nên các oxyt kim loại. Một số ít lại kết hợp với nitơ tạo ra các nitric kim loại. Oxy cũng kết hợp với carbon để tạo ra khí monoxide carbon. Tất cả các phản ứng này là trở ngại chính cho công việc hàn bởi chúng hình thành nên các khuyết tật như rỗ khí, làm giòn kim loại hàn. Mặc khác không khí lại chứa 80% nitơ và 20% oxy nên lẽ tự nhiên là không thể tiến hành hàn mà không có biện pháp nào để bảo vệ vũng chảy. Nhiệm vụ của khí bảo vệ trong hàn GMAW là tạo ra khí quyển có tính trơ hoặc khử để ngăn chặn các khí có hại từ không khí vào trong vũng hàn.
Đồng thời khí bảo vệ còn đảm nhiệm các vai trò sau:
- Mồi hồ quang dễ dàng và hồ quang cháy ổn định
- Tác động đến các kiểu chuyển dịch kim loại trong hồ quang hàn
- Ảnh hưởng đến độ ngấu và tiết diện ngang của mối hàn
- Tốc độ hàn
- Khả năng tạo ra các khuyết biên (undercut)
- Tẩy sạch bề mặt và biên đường hàn
Khí trơ sử dụng trong hàn GMAW có argon và heli. Heli có độ dẫn nhiệt lớn hơn argon và tạo ra cột hồ quang có năng lượng phân tán đều hơn. Heli cho mối hàn sâu, rộng và tiết diện ngang hình parabol trong khi argon thì cho tiết diện hàn hình núm vú. Với bất kỳ tốc độ cấp dây nào thì điện áp của hồ quang argon cũng thấp hơn đáng kể so với hồ quang heli. Có nghĩa là hồ quang argon cháy ổn định hơn hồ quang heli. Hồ quang argon sẽ có chuyển dịch phun dọc trục ở trị số ngay trên trị số dòng điện quá độ. Hồ quang heli có xu thế tạo ra kiểu chuyển dịch giọt cầu kích thước lớn ở khoảng dòng điện trung bình do đó hồ quang heli cho nhiều tia văng tóe hơn, bề mặt đường hàn xấu gồ ghề hơn so với hồ quang argon.
Sự pha trộn argon và heli, thường được áp dụng khi hàn kim loại không chất sắt và inox cũng như thép hợp kim thấp. Khi đó nâng cao được tính hợp lý của tiết diện ngang mối hàn đồng thời không đánh mất các ưu việt của đặc tính hồ quang argon.
Sự pha trộn oxy và CO2 vào argon và heli. Argon và heli không là môi trường bảo vệ tốt nhất khi hàn trên thép, với heli hồ quang chuyển dịch khó kiểm soát do các giọt văng tóe, còn argon thì đường hàn rất dễ khuyết biên. Thêm vào argon từ 1-5% oxy hoặc từ 3-10% CO2 sẽ cải thiện chất lượng hàn đáng kể.
Carbon dioxide, khí CO2 là khí hoạt hóa được áp dụng rộng rãi trong hàn GMAW trên thép carbon và thép hợp kim thấp. đây là loại khí không trơ duy nhất được dùng một mình để bảo vệ vũng hàn. Đặc trưng của quá trình hàn CO2 là tốc độ hàn cao, độ ngấu sâu.
Khi hàn với khí CO2 chỉ có hai kiểu chuyển dịch là ngắn mạch và cầu, chuyển dịch phun dọc trục là đặc điểm riêng của hàn trong môi trường khí argon. Kiểu chuyển dịch cầu có năng lượng tương đối cao và hồ quang mạnh nên văng tóe nhiều hơn.
So sánh với hàn trong môi trường giàu khí argon thì hàn CO2 cho mối hàn ngấu sâu, gồ ghề, hiệu quả làm sạch biên và bề mặt đường hàn kém hơn. Kim loại đắp sít rất chặt song mối hàn kém dẻo do hồ quang vẫn có tính oxy hóa.
Khí CO2dùng để hàn phải có độ sạch đến trên 99,5%, áp suất trong bình khoảng (50÷60) at. Đây là khí hoạt tính khi ở nhiệt độ cao nó phân ly ra CO và ôxy nguyên tử, cho nên CO2 có tác dụng bảo vệ tốt vì CO ít hòa tan trong kim loại lỏng và có tác dụng khử ôxy. CO2 được dùng rộng rãi để hàn thép C trung bình do giá thành thấp, mối hàn ổn định, cơ tính của liên kết hàn đạt yêu cầu, tốc độ hàn cao và độ ngấu sâu. Nhược điểm của hàn trong khí bảo vệ CO2là gây bắn tóe kim loại lỏng.
Bảng 1.2 - Một số loại khí bảo vệ tương ứng với kim loại cơ bản
|
Khí bảo vệ |
Kim loại cơ bản |
|
Ar (He) Ar + 1% O2 Ar + 2% O2 Ar + 5% O2 Ar + 20% CO2 Ar + 15% CO2+ 5% O2 CO2 |
Kim loại và hợp kim không có sắt. |
1.2.2. Trang bị hàn
Quá trình GMAW có thể thực hiện tự động hoặc bán tự động. Các trang bị cơ bản gồm có:
- Súng hàn - Bộ cấp dây hàn
- Bộ điều khiển - Nguồn điện hàn
- Van giảm áp
- Các trang bị cần thiết cho dây điện cực: giá đở cuộn dây, contact tip, ống dẫn hướng
- Cáp điện và các đường dẫn khí bảo vệ, nước làm nguội.
Các loại súng hàn khác nhau được thiết kế nhằm cung cấp hiệu quả tối đa cho công việc hàn. Chúng bao gôm súng hàn công suất cao, loại nhẹ dùng hàn ở mọi vị trí, loại thiết kế đặc biệt cho các mối hàn đặc biệt. Súng hàn và cáp hàn đảm nhiệm vai trò cung cấp khí bảo vệ cho vùng hàn, dẫn hướng dây điện cực từ bộ phận cấp dây đến ống tiếp điện (contacttip) trên súng hàn, dẫn điện từ nguồn điện hàn đến súng hàn. Khi nhấn công tắc trên súng hàn: khí, dòng điện hàn và dây hàn đồng thời được khởi động, hồ quang được mồi và duy trì tự động. Bộ phận cấp dây và bộ nguồn sẽ phối hợp các đặc tính với nhau để hiệu chỉnh tự động chiều dài hồ quang và dòng điện hàn. Sự hiệu chỉnh này thực hiện được là nhờ sử dụng bộ nguồn áp không đổi (CV) phối hợp với bộ cấp dây tốc độ không đổi.
Có loại làm nguội bằng nước, có loại làm nguội bằng khí, loại mỏ thẳng, loại mỏ cong. Loại làm nguội bằng khí thường có phạm vi ứng dụng cho dòng hàn nhỏ hơn 600A. Khi hàn trên các dây chuyền công nghệ chúng ta thường dùng loại làm nguội bằng nước.
- Súng hàn bao gồm các chi tiết sau:
- Ống dây dẫn và contact tip
- Mỏ phun khí
- Ống dẫn dây điện cực
- Ống dẫn khí bảo vệ
- Ống dẫn nước làm nguội (đối với loại làm nguội bằng nước)
- Dây dẫn điện hàn
- Công tắc điều khiển
Contact tip thường được chế tạo bằng đồng hoặc hợp kim đồng nó có nhiệm vụ tiếp điện cho dây hàn. Contact tip nối với nguồn điện hàn nhờ vào dây dẫn điện hàn. Mặt phía trong của contact tip rất quan trọng bởi vì nó vừa bảo đảm dẫn điện tốt vừa bảo đảm dây hàn đi qua dễ dàng. Khi hàn cần chọn contact tip phù hợp với cở dây hàn, contact tip cần được gá đặt nhẹ nhàng vào súng hàn nhờ vào côn siết và phải đặt đúng tâm của mỏ phun khí. Mỏ phun khí bảo vệ có nhiệm vụ cung cấp dòng khí bảo vệ vũng hàn. Chế độ dòng chảy trong mỏ phun rất quan trọng vì nó bảo đảm cho việc bảo vệ vùng hàn khỏi sự xâm nhập của các khí có hại. các cở mỏ phun khác nhau được chọn cho phù hợp với công việc, cở lớn dùng cho dòng hàn lớn, bề rộng mối hàn lớn, cở nhỏ dùng cho dòng hàn nhỏ. Ống dẫn dây hàn là bộ phận định vị và hướng dẫn dây hàn từ bánh xe cấp dây đến contact tip. Trong quá trình hàn cần bảo đảm việc cấp dây điều đặn thì hồ quang mới cháy ổn định. Dây hàn bị vặn xoắn, gấp khúc phải loại bỏ không được dùng để tránh bị kẹt dây. Đường kính và vật liệu ống dẫn dây rất quan trọng đối với quá trình hàn, ống dẫn bằng thép dùng cho các vật liệu cứng như thép, inox trong khi ống nilon được dùng cho các vật liệu mềm như nhôm, magnesium, đồng. khi hàn cần chú ý tránh bẻ gấp khúc ống dẫn để không bị kẹt dây. Đối với mỗi cở dây cần dùng ống dẫn thích hợp.
Bộ cấp dây kiểu đẩy thường được dùng song khoảng cách từ thiết bị hàn dến nơi hàn không quá 3÷4 mét. Cấp dây kiểu kéo thường được bố trí trong súng hàn và nó cho phép khoảng cách đến thiết bị hàn xa hơn. Khi phải hàn trên cao hoặc không thể bố trí thiết bị gần nơi cần hàn có thể sử dụng loại súng hàn có gắn cuộn dây (spool on gun). Motor cấp dây thường là loại có tốc độ điều chỉnh vô cấp. Bộ cấp dây tốc độ không đổi có trang bị mạch điện tử để điều khiển quá trình mồi hồ quang, tự động hiệu chỉnh khi có sự thay đổi điện áp nguồn, tự hiệu chỉnh khi xảy ra sự trượt dây. Kết quả là hồ quang mồi và cháy ổn định hơn, hạn chế đáng kể lượng văng tóe. Thiết bị được bố trí trong hộp kín để hạn chế bụi bặm, tăng tuổi thọ và giảm nhu cầu bảo trì.
Tốc độ cấp dây biến thiên từ 1,9÷25 m/min ( 75÷980 in/min). Bộ cấp dây có trang bị hệ thống hãm động lực cho phép dừng cấp dây tức thời mỗi khi nhả contact điều khiển. Bộ điều khiển hàn và bộ cấp dây thường được liên kết khối với nhau. Nó có chức năng điều khiển tốc độ cấp dây. Tốc độ motor được xác lập trước theo khoảng giá trị dòng hàn. Mạch điều khiển sẽ hiệu chỉnh quá trình khởi động và dừng cấp dây. Khí bảo vệ, nước làm nguội và dòng điện hàn thường được gắn với nguồn cung cấp thông qua bộ điều khiển. Lưu lượng khí bảo vệ và nước được hiệu chỉnh đồng bộ với việc khởi động và và dừng quá trình hàn nhờ vào các van điện từ (solenoids). Thường thì bộ điều khiển được trang bị các bộ định thì cho sự phun khí trước và sau khi hàn. Việc khởi động dòng hàn có thể kích hoạt trực tiếp từ bộ điều khiển hoặc thông qua điện áp hồ quang.
Van chỉnh áp khí bảo vệ, thiết bị hàn cần cung cấp khí bảo vệ với áp suất và lưu lượng không đổi. Van chỉnh áp đảm nhiệm vai trò đó. Có các loại van một cấp hoặc hai cấp, có hay không trang bị lưu lượng kế. Loại hai cấp cho áp suất và lưu lượng khí cung cấp đều hơn loại một cấp.
- Nguồn điện hàn
Quá trình GMAW được dùng với nguồn DC kiểu điện áp không đổi (CV), điện cực dương. Có nghĩa là súng hàn được gắn vào cực dương còn chi tiết hàn được đấu cực âm. Điện cực DC âm không thích hợp do hồ quang không ổn định.
Ưu điểm chính của thiết bị kiểu CV là điện áp hồ quang không đổi trong suốt quá trình hàn. Dòng hàn sẽ tự động tăng hoặc giảm khi chiều dài hồ quang thay đổi, từ đó làm tăng hoặc giảm tốc độ chảy của dây hàn nhờ đó mà điện áp hồ quang được duy trì không đổi. Như vậy , thiết bị GMAW điều chỉnh dòng điện hàn thông qua bộ cấp dây.
Hình 1.2 - Đặc tính V-A của thiết bị CC và CV
Đường đặc tính ngoài của thiết bị CV có dạng nằm ngang, nên ứng với sự thay đổi nhỏ về điện áp cũng dẫn tới sự thay đổi lớn về dòng điện. Nói cách khác độ nhạy rất cao trong khi thiết bị CC thì hầu như dòng không thay đổi khi thay đổi điện áp. Khi tăng khoảng cách giữa contact tip và chi tiết, điện áp hàn và chiều dài hồ quang tăng lên, dòng điện hàn sẽ giảm xuống như đặc tính đã mô tả, khi đó tốc độ chảy của dây hàn giảm tương ứng. vì tốc độ cấp dây là hằng nên lúc này sẽ lớn hơn tốc độ chảy kết quả là hồ quang sẽ bị ngắn lại. Quá trình ngược lại sẽ diễn ra khi giảm điện áp hồ quang.
L: 6,4mm 12,7mm 6,4mm
V: 24V 29 V 24V
A: 250A 220A 250A
Hình 1.3 - Cơ chế điều chỉnh điện áp hồ quang
1.3. Cơ khí hóa, tự động hóa quá trình hàn (Robot hàn)
Công nghệ hàn tự động với robot đã được ứng dụng từ lâu trong ngành công nghiệp sản xuất ô-tô ở các nước công nghiệp phát triển, tiêu biểu trong số đó như Hoa Kỳ, Nhật Bản, CHLB Ðức, Pháp, Ý, Hàn Quốc, Trung Quốc,… và gần đây là các nước trong khu vực Ðông Nam Á. Sau đó, công nghệ hàn tự động với robot được áp dụng trong các ngành đóng tàu biển, chế tạo máy.
Trong các nhà máy sản xuất xe hơi thì hàn điểm là công việc sử dụng robot nhiều nhất: mỗi khung xe được cố định vào một palette và được điều khiển di chuyển khắp nhà máy. Khi khung xe đến trạm hàn, bộ phận kẹp sẽ cố định các chi tiết đúng vào vị trí cần thiết, trong khi đó robot di chuyển dọc theo các điểm hàn được lập trình trước.
1.3.1. Robot Almega AX-V6.
Robot Almega AX-V6 hỗ trợ cho hầu hết các ứng dụng hàn, cắt công nghiệp như hàn TIG, MIG/MAG, gia công cắt plasma ...với các sản phẩm sắt, nhôm, và các hợp kim khác... Phần mềm Windows NT được lựa chọn chạy nền cho ứng dụng robot với chuẩn truyền thông CAN đáp ứng các yêu cầu cao cấp về điều khiển và giám sát trong sản xuất.
Hình 1.4 – Sơ đồ cấu hình chính của Robot hàn Almega-AX-V6
A.Thân Robot B.Bảng dạy C.Bộ điều khiển D.Hộp thao tác
• Dùng phương pháp hàn MIG/MAG được điều khiển hoàn toàn bằng kỹ thuật số
• Giảm tốc đa độ bắn tóe
• Điều khiển chính xác nguồn nhiệt
• Tốc độ hàn nhanh và chất lượng mối hàn cao, chất lượng mối hàn được cải tiến rõ rệt khi bắt đầu và kết thúc hàn.
• Có chế độ kiểm soát hồ quang giúp cho quá trình theo dõi chính xác hơn hoặc trạng thái/ lỗi đầu ra. Dự liệu có thể được lưu ở tệp tin sổ ghi để dùng làm cơ sở dữ liệu kiểm soát chất lượng.
• Có chức năng kiểm soát thông số hàn như dòng điện, điện áp hàn, tốc độ cấp dây... liên tục và hiển thị cảnh báo nếu sự cố xảy ra.
• Các tệp bản ghi của chế độ hàn được xử lý một cách tự động và có thể được lưu trong card PC.
Robot AX-V6 có sơ đồ cấu hình chính được mô tả ở hình 1.4
Về mặt truyền động và điều khiển, robot được cấu tạo từ các khối cấu trúc cơ khí hoạt động nhờ các cơ cấu tác động. Các cơ cấu tác động này có thể hoạt động phối hợp với nhau để thực hiện những công việc phức tạp dưới sự điều khiển của một bộ phận có cấu tạo như máy tính, còn gọi là những bộ điều khiển PC - based. Với những đặc điểm về cấu tạo và hoạt động thì robot thường được sử dụng trong các hệ thống sản xuất linh hoạt dạng workcell (FMS - Flexoble Manufacturing Systems) và các hệ thống sản xuất tích hợp máy tính (CIM - Computer Integrated Manufacturing). Càng ngày các dây chuyền sản xuất tự động có sử dụng robot thay thế dần các dây chuyền sản xuất tự động với chương trình hoạt động “cứng” trước đây.
Việc ứng dụng robot vào sản xuất gắn liền với sự hiểu biết đầy đủ các vấn đề có liên quan chặt chẽ với nhau như các dạng nguồn dẫn động, các hệ thống và chế độ điều khiển, các cảm biến trang bị trên robot, khả năng của phần mềm và ngôn ngữ lập trình cũng như chọn lựa các bộ giao tiếp và xuất/nhập tín hiệu phù hợp cho các bộ phận chấp hành khác nhau. Về mặt kết cấu, robot được chế tạo rất khác biệt nhau, nhưng chúng được xây dựng từ các hành phần cơ bản như nhau (hình 1.3):
- Thân Robot - Bảng dạy
- Bộ điều khiển - Hộp thao tác
1.3.2. Cấu tạo các bộ phận chính của Robot AX-V6
1.3.2.1. Thân Robot:
• Công suất động cơ và hộp giảm tốc lớn hơn, do đó khả năng dịch chuyển tốt hơn hẳn
• Sử dụng công nghệ điều khiển động cơ servo tiến tiến mà vấn đề động lực học đòn bẩy được lưu tâm để chống va đập. “Điều khiển giải phóng lực bên ngoài” mà tay máy đã va chạm và hấp thu
• Độ bền cao
• Bộ cấp dây tạo độ dốc được cải tiến mới nhất
• Giảm thiểu cáp kết nối, dễ lắp đặt
• Giảm vật cản cho Rôbốt do trục cổ tay độc đáo, tay cong... được thiết kế đặc biệt.
Hình 1.5 – Mô hình tay máy
- Cổ tay máy:
Bàn tay người có 27 khúc xương với 22 bậc tự do rất phức tạp. Hiển nhiên, các nhà thiết kế không bao giờ áp dụng hết các bậc tự do đó vào tay gắp của robot. Nhiều nhà nghiên cứu về khoa học phân tích thao tác cũng như các nhà sản xuất đưa ra số bậc chuyển động tối đa hợp lý của tay máy là sáu như đã phân tích ở phần trước. Ngoài ba chuyển động cơ bản để thực hiện chuyển động định vị, tay máy sẽ được bổ sung tối đa là ba chuyển động định hướng dạng ba chuyển động quay quanh ba trục vuông góc, gồm:
• Chuyển động xoay cổ tay (ROLL), góc quay ρ
• Chuyển động gập cổ tay (PITCH), góc quay δ
• Chuyển động lắc cổ tay (YAW), góc quay ε
Hình 1.6 – Độ vươn và góc quay của cánh tay Robot.
Hai chuyển động gập (PITCH) và lắc cổ tay (YAW) thực hiện trên hai phương vuông góc. Tuỳ theo yêu cầu của thao tác công nghệ đặt ra cho robot, người thiết kế cần thực hiện sự phối hợp đa dạng các chuyển động định vị với các chuyển động định hướng. Bảng dưới đây trình bày một số khả năng phối hợp các bậc chuyển động chính (1, 2, 3) và các chuyển động định hướng có tính chất tham khảo.
Bảng 1.3 - Một số khả năng phối hợp các bậc chuyển động chính
|
Số bậc chuyển động định vị |
Số bậc chuyển động định hướng |
Khả năng phối hợp (tổng số chuyển động/số chuyển động định hướng) |
|
2 |
0; 1: 2; 3 |
2/0: 3/1: 4/2: 5/3 |
|
3 |
0; 1: 2; 3 |
3/0: 4/1: 5/2: 6/3 |
|
4 |
0; 1: 2; 3 |
4/0: 5/1: 6/2: 7/3 |
1.3.2.2. Bộ điều khiển:
Khi sử dung bộ điều khiển AX-C: Công tắc nguồn trên panen mặt trước của bộ điều khiển AX-C, bảng dạy và hộp thao tác được kết nối từ mặt bên của bộ điều khiển, hình 1.7:
• Công nghệ điều khiển dạng sóng tốc độ cao bằng phần mềm tiên tiến
• Là nguồn hàn chuyên dụng với các thông số ngạc nhiên như máy có bộ biến đổi tần siêu tốc 100kHz.
Trong bộ điều khiển cung cấp các tính năng được nâng caokhả năng bền nhiệt, chống bụi và độ tin cậy được nâng cao trong tất cả các môi trường.
Hình 1.7 – Bộ điều khiển AX-C
Quản lý dựa trên PC để tương thích với các ứng dụng khác nhau. Bộ điều khiển AX21 có thể được sử dụng với một loạt các ứng dụng, bao gồm hàn hồ quang, hàn điểm và xử lý vật liệu, giải quyết tất cả các loại nhu cầu trong quá trình sản xuất.
- Điều khiểnvớiđộ tin cậycao hơnvàbảo trìtốt AX21
- Dễ dàng bổ xung thêm về các trục đường bên ngoài hơn so với mô hình trước.
1.3.2.3. Bảng dạy:
Trong thực tế, co rất nhiều công cụ lập trình cho robot như keyboard, teach pendant, simulator... Nhưng đặc biệt đối với các robot hàn, người ta hầu như sử dụng Teach pendant như một công cụ lập trình hiệu quả nhất.
Về thực chất thì Teach Pendant là một thiết bị thường có dạng hộp cầm tay (hand_held box) có các phím để thực hiện công việc lập trình cho Robot, thao tác trên file, cài đặt các chế độ…vv, được nối với robot bằng cáp điện hoặc quang, dùng để điều khiển chuyển động của mỏ hàn trên robot đi qua các vị trí của quỹ đạo cần hàn ở dạng teach mode hoặc dùng để thực thi các chương trình lập trình sẳn…
Cấu tạo của Teach Pendant rất đa dạng, tùy thuộc vào từng công ty sản xuất với mẫu mã và hình dáng phù hợp với robot của chính các công ty đó. Nhìn chung thì tất cả các Teach Pendant đều phải có hai bộ phận chính là màn hình LCD để hiển thị các thông số và các nút để nhập, điều chỉnh các dữ liệu hoặc thực hiện các thao tác…
Teach Pendant:Thân thiện với người sử dụng Dạy Pendant Cung cấp kiểm soát toàn cho năng suất cao và hiệu suất hàn tối ưu.
Hình 1.8 – Bảng dạy.
1.3.1.4. Hộp thao tác:
Hộp thao tác được trang bị với số nút ấn tối thiểu cần thiết để thực hiện các điều khiển cơ bản đối với ROBOT, ví dụ: nguồn của động cơ về ON, khởi động và ngừng chế độ vận hành tự động (Auto operation), ngừng khẩn cấp, chuyển đổi giữa chế độ dạy (Teach) và chế độ chạy tự động (Playback), hình 1.9.
- Hộp thao tác được kết nối với bộ điều khiển AX-C như là một phụ tùng tiêu chuẩn, không thể kết nối với bộ điều khiển AX
- Hộp thao tác này khác với panen thao tác độc lập là phụ tùng tuỳ chọn của bộ điều khiển AX.
Hình 1.9 – Hộp thao tác
Chức năng của nút ấn và công tắc trên hộp thao tác.
Công dụng |
Mô tả chức năng |
|
|
A |
[Nút ấn ON cấp nguồn cho động cơ] |
Nút này được dùng để điện của động cơ về vị trí ON, khi đã đưa về ON ROBOT sẵn sàng để vận hành. |
|
B |
[Nút ấn khởi động] |
Trong phương thức chạy ngược trở lại, nút này khởi động chương trình đã được định sẵn. |
|
C |
[Nút ấn ngừng] |
Trong phương thức chạy ngược trở lên, nút này ngừng chương trình đang ở trạng thái khởi động |
|
D |
[Công tắc chọn phương thức] |
Công tắc này được sử dụng để chọn phương thức. Có thể chọn hoặc phương thức giảng dạy hoặc phương thức ngược trở lại. Công tắc này còn có thể dùng kết hợp với công tắc chuyển chế độ dạy nằm trên bảng dạy. Công tắc này còn có thể dùng kết hợp với [công tắc của tay treo giảng dạy] nằm ở trên tay treo giảng dạy. |
|
E |
[Nút ấn ngừng khẩn cấp] |
Nhấn nút này, ROBOT sẽ ngừng khẩn cấp.Ngừng khẩn cấp được thực hiện bằng cách ấn công tắc trên hộp vận hành hoặc trên tay treo giảng dạy. Muốn thôi ngừng khẩn cấp hãy vặn nút này theo chiều kim đồng hồ (nút ấn sau đó sẽ trở về vị trí ban đầu). |
Bảng 1.4 - Thông số đặc tính tiêu chuẩn của Robot hàn Almega-AX-V6
|
Danh mục |
AX-V6 |
||
|
Số bậc tự do |
6 |
||
|
Số trục |
6 |
||
|
Tải trọng tối đa |
6 kg |
||
|
Sai số lặp lại vị trí |
±0,08 cm |
||
|
Hệ thống truyền động |
Động cơ Servo xoay chiều |
||
|
Công suất |
2750W |
||
|
Tầm hoạt động |
Tay |
J1 |
(±) |
|
J2 |
(- ÷ +) |
||
|
J3 |
(-) |
||
|
Khớp |
J4 |
360(±) |
|
|
J5 |
(-) |
||
|
J6 |
|||
|
Tốc độ tối đa |
Tay |
J1 |
|
|
J2 |
|||
|
J3 |
|||
|
Khớp |
J4 |
||
|
J5 |
|||
|
J6 |
|||
|
Diện tích mặt cắt phạm vi hoạt động |
3,14x |
||
|
Nhiệt độ môi trường hoạt động |
0÷ |
||
|
Trọng lượng |
155 kg |
||
|
Tải trọng tối đa nâng được |
10 kg |
||
|
Kiểu lắp đặt |
Nền, treo tường, Treo trên trần |
||
Chương 2 – KIẾN THỨC LÝ THUYẾT LIÊN QUAN
2.1. Công nghệ hàn hồ quang nóng chảy trong môi trường khí bảo vệ
Trong những năm gần đây, công nghệ hàn hồ quang trong môi trường khí bảo vệ đang có những bước phát triển mạnh mẽ. Chúng ta có thể gặp công nghệ hàn từ những vật dụng, kết cấu đơn giản như khung cửa sổ, khung xe đạp, xe máy…đến những chi tiết lớn hơn, hiện đại hơn như tàu vận tải, máy bay, tàu vũ trụ…Để thiết kế được những vật dụng ấy, vai trò của kỹ sư hàn là rất lớn.
Công nghệ từ hàn bán tự động đến hàn tự động với yêu cầu về năng suất cao, yêu cầu về giá thành. Và hàn robot đang được ứng dụng rất rộng rãi trong ngành sản xuất xe máy, ôtô, máy bay,…
Trong phần này ta nghiên cứu công nghệ hàn hồ quang trong môi trường khí bảo vệ về cơ bản giúp ta có thể hiểu rõ về các yếu tố công nghệ, xây dựng tính toán chế độ hàn, chuẩn bị liên kết hàn và các kỹ thuật khi hàn hồ quang trong môi trường khí bảo vệ.
2.1.1. Chuẩn bị liên kết trước khi hàn
Các yêu cầu về hình dáng, kích thước, bề mặt liên kết trong phương pháp hàn hồ quang nóng chảy trong môi trường khí bảo vệ tương tự như ở các phương pháp hàn khác.